PLX9052_PCI板卡的开发
PLX9052 PCI板卡的开发
第一章概述
由于PC机的发展,PCI总线已成为工业和商业PC机的主流。因此学习开发基于PCI 总线的技术是许多工程技术人员以及大专院校的当务之急。
§1第一节PCI总线简介
PCI总线与早期的ISA总线有极大的不同,它与ISA总线技术也无任何连贯性。下面我们就将PCI总线与ISA总线作一些对比来简单的介绍PCI总线,让大家对PCI总线有一个比较全面的初步了解。
ISA总线由如下几个部份组成:
数据总线:D0~D15;
地址总线:A0~A23;
控制总线:MEMW、MEMR、IOW、IOR、IRQ3~7,9~12,14,15、IOCHCK、IOCHRDY、RESET、SYSCLK、DACK0~3、DACK5~7、AEN、REFRESH、T/C、SBHE、MASTER、DRQ0~3、DRQ5~7等;
电源:±12V、±5V、GND。
PCI总线由如下几个部份组成:
地址/数据复用总线:AD0~31;
系统引脚:CLK、RST#;
控制总线:C/BE[3:0]#、PAR、FRAME#、IRDY#、TRDY#、STOP#、LOCK#、IDSEL、 DEVSEL#;
仲裁引脚(仅主控):REQ#、GNT#;
错误状态引脚:PERR#>SERR#;
中断:INTA#、INTB#、INTC#、INTD#(一般仅用INTA#);
JTAG边界扫描信号:TD1、TD0、TDK、TMS、TRST#;
电源:±12V、VCC、GND。
从以上的列表可看出PCI总线和ISA总线的不同,ISA总线的地址与数据是独立的,而PCI总线的地址与数据是复用的。因此它不可能像ISA总线那样将应用电路的地址线与其直接连接。但是,如果应用电路的地址与数据总线也是复用的,那是不是就可以直接连接呢?答案是否定的。这是因为PCI总线实现即插即用(PNP),使用了一种软地址分配的方法,即特定的PCI总线上设备的地址,不是设备设计时确定的,而是系统通过软件来分配的。我们会在PCI配置一章中详细说明。
PCI总线与ISA总线除以上不同外,其他地方也均不相同,它没有IOR、IOW、MEMR、MEMW等对于应用电路而言必须要的信号。那么它又怎样来实现对目标设备的I/O空间、存储器空间的读写呢?就PCI总线而言,它主要是由C/BE[3:0]#信号来实现的。它们的具体实现方法见下面PCI总线引脚介绍一节。
§1.2 PCI接口芯片的选定
由上节可见PCI总线与ISA总线的不同,那么我们要设计一个PCI应用电路又该怎么办?其实实现PCI总线的应用设计的方法有许多种,下面我们一一介绍一下。
一种方法是可以使用专用PCI接口芯片,如PLX公司的PCI9052、PCI9054等和AMCC 公司的S5933、S5920、S5930等。
另一种方法是使用CPLD或FPGA,通过购买PCI的IP宏来实现。不过这种方法一次性开销很大,一个IP一般要几千美金,并且其辅助软件工具的费用也相当昂贵。这比较适合于大批量的应用,若数量不大则最好不要采用此种方法。
在选定好用何种方式后,下面我们就要来确定使用哪种模式的芯片来设计PCI应用。PCI 接口芯片一般有主控和从控两种模式。所谓“主控”就是PCI接口芯片可以让用户电路控制PC机资源(即主动对目标发读写信号)。“从控”就只能让PC机来控制用户电路工作,而用户电路只能被动接受,如ISA总线一样。
那么主控有什么好处呢?由于主控有很强的灵活性,所以在大量数据传输时,它非常的用。下面就一个视频处理应用来将主控和从控作一些比较。
若设某视频应用在PC机内有2块PCI卡,A块是做视频信号的采集工作,B块是做视频信号的压缩处理的。它们要做的工作是A将数据采集好后传给B块供其压缩,并也要传给PC机供其显示,而B块处理完后也要传给PC机供其存盘或送传到网络上。
那么在情况甲下,设A块为主控PCI卡。那么A采集完数据后可以先将数据传给PC机作显示处理,并在PC机作显示处理的同时将数据再传给B卡供其作压缩处理。由于PCI总线带宽足够宽,一般PC机显示还未完,B卡已经处理完,如此PC机又可实时进行存储或送传至网络。
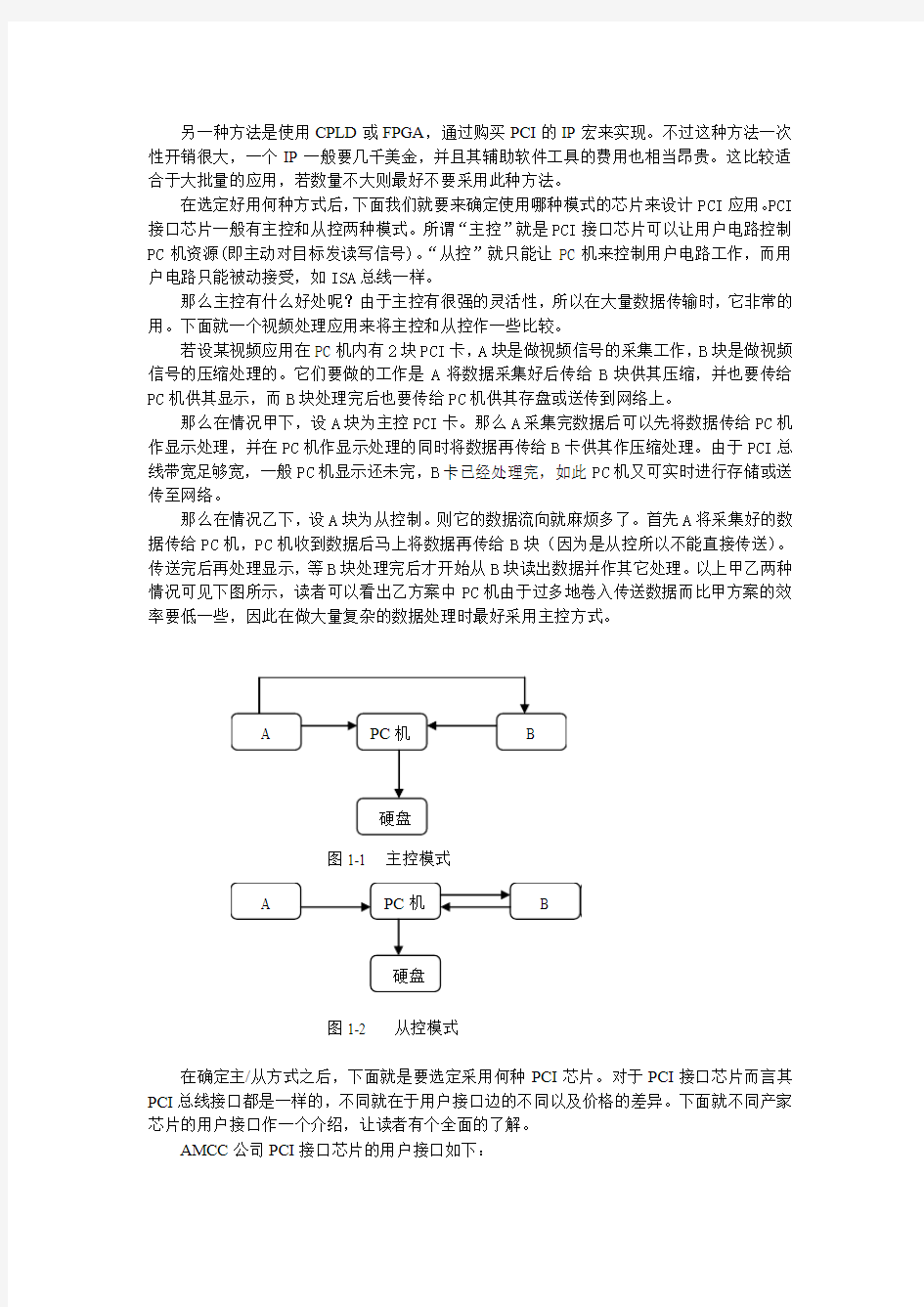
那么在情况乙下,设A块为从控制。则它的数据流向就麻烦多了。首先A将采集好的数据传给PC机,PC机收到数据后马上将数据再传给B块(因为是从控所以不能直接传送)。传送完后再处理显示,等B块处理完后才开始从B块读出数据并作其它处理。以上甲乙两种情况可见下图所示,读者可以看出乙方案中PC机由于过多地卷入传送数据而比甲方案的效率要低一些,因此在做大量复杂的数据处理时最好采用主控方式。
图1-1 主控模式
图1-2 从控模式
在确定主/从方式之后,下面就是要选定采用何种PCI芯片。对于PCI接口芯片而言其PCI总线接口都是一样的,不同就在于用户接口边的不同以及价格的差异。下面就不同产家芯片的用户接口作一个介绍,让读者有个全面的了解。
AMCC公司PCI接口芯片的用户接口如下:
S5933或S5920:Pass_Thru方式接口;
FIFO;
邮箱;
主控接口(仅S5933);SEEPROM或Flash Memory接口(24C01或29512)。
PLX的PCI9052或PCI9050:仿ISA接口(仅PCI9052);
C模式(非复用模式);
J模式(复用模式);
SEEPROM接口(93C46)。
其中S59XX系列的接口中Pass_Thru是从模式接口,其不如PCI905X系列的C模式或仿ISA接口使用方便,它是地址与数据复用的,它的分离处理比较复杂,用户在分离时还需考虑数据总线的宽度以及I/O、Memory空间是在S59XX系列的PCI配置空间的哪一些基地址寄存器中方可正确处理。而PCI905X则只要配置一些寄存器即可,而不用在其外部弄一个很复杂的电路来支持其工作。特别对于老的ISA板转PCI,PCI9052则更是首选,因为其内部集成有相关转换电路,用户不用考虑在外部对PCI信号作相关处理。
但在大量连续数据传输时S59XX可能有优势,因为它的FIFO接口可以让用户电路非常简单,(所谓FIFO就是先进去的数据先出来,不用地址信号,其内部电路会自动地指向下一个数据。)因为用户可以在接口芯片外部级联一个FIFO即可,不用任何地址线产生电路,对于一些DSP是相当有用的。
由上可见,用户在设计电路时要多方考虑,在作出对芯片的选择后方可进入实质的设计。§1.3 PCI总线引脚描叙
PCI总线接口信号
第二章9052简介
§2.0 基本描叙
PCI9052提供了一个高性能的PCI总线目标(从)接口。9052被设计成连接大量针对PCI总线设计的局部总线(Local bus),并且也被允许相对慢速的设备被设计成满足在PCI 总线上的132MB/sec的焠发传送。(焠发传送详见第三章)
PCI9052能被编程去直接连接复用或非复用的8位、16位或32位局部总线。8位和16位模式也能容易地转换成ISA转PCI的设计。
PCI9052包含读和写FIFO,用来将32位宽33MHz的PCI总线与有可能总线宽度要窄或慢的局部总线的速度进行匹配。最大5个局部地址空间和4个片选被支持。
§2.1 主要功能
PCI2.1版协议:PCI9052是支持从PCI2.1版协议的低值的从适配器。此芯片也允许转换ISA适配器到PCI。
直接从(目标)数据传送模式:PCI9052支持从PCI总线到局部总线的焠发存储器映射空间的传送和I/O访问。读和写FIFO允许在PCI和局部总线之间的高性能焠发。PCI总线被允许焠发,这样局部总线能被设置成焠发或持续单周期。
中断产生器:PCI9052能从两个局部总线中断输入端产生一个PCI中断。
时钟:PCI9052局部总线接口的运行需要一个局部时钟来产生所需的内部时钟。此时钟异步于PCI时钟,允许局部总线运行在一个独立于PCI时钟的速率。此PCI总线时钟(BCLKO)的缓冲可以连接到局部总线时钟端(LCLK)。
可编程的局部总线配置:PCI9052支持8位、16位或32位局部总线,它们可以是复用或非复用。PCI9052有4个字节允许(LBE[3:0]#)信号,26条地址线(LA[27:2]),和32位、16位、8位数据线(LAD[31:0])。
先读模式:PCI9052支持先读模式,CPU能从代替局部边的PCI9052内部FIFO预先读数据。地址必须是早先地址的接下来的地址,并且必须是32位边界(即下一个地址=当前地址+4)。
总线驱动:所有控制地址和数据信号由PCI9052产生直接驱动PCI和局部总线,不用外部驱动。
串行EEPROM接口:PCI9052包含一个SEEPROM接口,用来存储局部配置信息。
注:SEEPROM被用来配置PCI9052到ISA接口模式。
4个局部片选:PCI9052提供4个片选,每个片选的基地址和范围被编程成独立的由SEEPROM或主机。
5个局部地址空间:每个局部地址空间的基地址和范围被由SEEPROM或主机编程成唯一的。
大/小边界的字节交换:PCI9052支持大和小边界字节顺序。在16位或8位局部总线操作时PCI9052也支持大边界字节通路方式重定向到当前字/字节通路。
读/写选通延迟和写周期保持:读和写(RD#和WR#)信号能被从此周期的开始时延迟来支持早期遗留的接口(如ISA)。
局部总线等待状态:插入LRDY#(局部准备好输入信号)握手信号能产生几个等待状态,PCI9052也有一个内部等待状态产生器(R/W地址到数据,R/W数据到数据,和R/W 数据到地址)。
可编程预取计数器:局部总线预取计数器能被编程为0(无预取)、4、8、16或持续(预取计数器关)的预取方式。预取数据能被用来当Cache数据,当然需要使用连续的地址(必须为长字边界)。
延迟读方式:PCI9052支持PCI协议2.1版延迟读。
·PCI读用写溢出方式
·PCI读没有溢出方式
·PCI读没有写方式
·PCI写方式
PCI读/写请求超时定时器:PCI9052有一个可编程的PCI目标延迟计时器,当其期满时产生一个RETRY到PCI总线。
ISA方式接口逻辑:PCI9052支持单周期读/写对于8位、16位从PCI总线访问ISA总线的存储空间或I/O空间。空间0和空间1被用来作存储空间和I/O空间的访问。参看“ISA 接口方式”一章。
PCI时钟机制:PCI9052支持PCI目标LOCK序列。一个PCI主控能获得独占访问PCI9052设备由锁定PCI9052。
PCI总线转送直到132MB/sec。
低功耗CMOS 160pin QFP封装
图2-1 PCI9052信号接口
第三章局部总线操作
§3.1 局部总线周期
§3.1.1 PCI9052不支持局部总线的设备的直接主控能力。PCI9052不能从局部总线读或写内部寄存器。内部寄存器能让主机的CPU通过PCI总线来访问。PCI9052对于局部总线是主控者。
§3.1.2 准备/等待状态控制
如果LRDYi#输入信号被禁止,外部的LRDYi#输入信号在局部总线访问的等待状态时是无效的。等待状态计数器控制在地址到数据、数据到数据和数据到地址周期之间产生的内部等待状态。在每个数据访问周期的开始时用它的配置寄存器的值去初始化等待状态计数
器。
当LRDYi#输入信号被允许时,PCI9052在等待状态计数器到0之前是不会监测LRDYi#信号。此时LRDYi#输入信号控制几个附加的等待状态。(参见图3-1和3-2)。
BTERM#输入信号直到等待状态计数器为0时才被允许。
图3-1 PCI9052单周期写
图3-2 PCI9052单周期读
§3.3 焠发方式和持续焠发模式(Bterm“Burst Terminate”模式)
§3.1.1 焠发方式
所谓焠发即若有一块地址连续的数据要传送时,只在开始时只有数据块第一个数据段的地址会出现,接下来的数据将不会跟有地址周期,如此就极大地提高了传送速度,如下图所示:
图3-3 焠发方式示意图
如果PCI905的焠发被允许并且Bterm输入信号被允许,则PCI9052将焠发。其数据宽度如下表:
表3-1 焠发方式数据宽度
§3.1.2 持续焠发方式(Bterm “Burst Terminate”方式)
Bterm方式允许PCI9052执行超过4个长字(Lword)焠发的长焠发到设备。PCI9052
产生一个地址周期,然后持续焠发数据。如果设备在某个地址段之后又请求新的地址,它可以申明BTERM#输入信号有效来引起PCI9052产生一个新的地址周期。BTERM#输入信号是一个准备好的输入信号,它用来响应当前数据传送和请求产生一个数据的地址(ADS#)周期。允许Bterm方式并且仅当在FIFO成空或满或传送完成时,PCI9052申明BLAST#信号。
部份长字访问:长字访问(不是所有字节允许有效)被打断成单地址和数据周期。
§3.1.3 恢复状态
在非复用模式,PCI9052使用在总线区域描叙寄存器中的NXDA(Data to Data的等待状态)值去决定有多少个恢复状态插在最后一个的数据传送周期或下一个地址周期之间。此值编程为0到3个时钟周期。
在复用方式,PCI9052在最后一个的数据传送和下一个地址周期之间插入一个恢复状态。加恢复状态只要编程大于1的值到总线区域描叙寄存器的NXDA中即可。
§3.1.4 直接从写访问8位、16位总线
对于直接从写/读,仅由PCI总线主控者来决定写/读来哪个指定的数。访问一个8位或16位总线引起PCI总线长字访问变成多个局部总线传送。对于每次传送,哪个字节被访问是通过对地位LA[1:0]译码来获取。
§3.1.5 局部总线小/大通路
PCI总线是一个小通路,即数据字节是按由高到低来排列。字节0出现在AD[7:0],字节1出现在AD[23:16],字节2出现在AD[31:24]。
PCI9052局部总线能被编程去操作在大通路方式。在大通路方式PCI9052调换了数据字节位置。即字节0出现在AD[31:24],字节1出现在AD[23:16]上,字节2出现在AD[15:8]上,字节3出现在AD[7:0]上。
数据传送如下:
32位局部总线
数据通路和焠发顺序被列在表3-3并且示例于图3-3
表3-3向上的字节通路传送
图3-3 Big/Little Endian—32 Bit Local Bus
16位局部总线
对于16位局部总线,PCI9052能编程成向上或向下字通路。字节通路和焠发顺序被列在表3-4和表3-5并且示例于图3-4
表3-4 Upper Word Lane Transfer
表3-5 Lower Word Lane Transfer
图3-4 Big/Little Endian—16 Bit Local Bus
8位局部总线:对于8位局部总线,PCI9052能被编程成向上或向下字节通路。字节通路和焠发顺序被列在表3-6和3-7并且示例于图3-5
表3-6 Upper Byte Lane Transfer
表3-7 Lower Byte Lane Transfer
图3-5 Big/Little Endian—8 Bit Local Bus
对于每个下面的传送类型,PCI9052局部总线能被独立编程去操作在小或大通路方式:·直接PCI从访问局部空间0
·直接PCI从访问局部空间1
·直接PCI从访问局部空间2
·直接PCI从访问局部空间3
·直接PCI从访问外部ROM空间。
§3.2 片选X(CSX)基寄存器
PCI9052包含了提供4个片选控制信号到局部总线的能边。这就免除了附加地址译码电路在PCI卡上。使用此功能,用户必须配置好每个片选的地址空间。
有4个片选X基寄存器。这些寄存器控制4个片选引脚在PCI9052上。例如片选0基地址寄存器控制CS0#(引脚130),片选地址寄存器控制CS1#(引脚131),等等。
片选X基寄存器有3个服务目的:
1、允许或不允许片选功能在PCI9052中。如果允许,片选信号在地址线上的地址正好位于由相关基寄存器指定的范围时有效。如果不允许,片选信号将无效。
2、用来设置片选信号有效的地址范围。
3、用来设置地址的起始值。
对于编程片选X基寄存器,有3个规则必须遵守,如下所示:
1、范围必须是2的幂次方;
2、基地址必须是范围的整倍数;
3、如果多个片选X基寄存器被使用,相互之间不能覆盖。
表3-8 片选X基寄存器信号编程
当Y位用来允许和不允许片选信号。X位被用来决定长度和CS#引脚的基地址。对于编程基和长度,X位可以如下设置。
在Y位之上的第一个1为此设备的长度或范围。范围的大小是2的多少次幂,此指数决定了在基寄存器的哪位置1来表示范围。从Y位开始计,Y位为指数1,第2位为指数2,以此类推。
基地址由范围位之上的第一个置1位决定。基地址必须是范围的倍数,具体设置方法如下:
图3-6 片选基地址和范围
§3.2.1片选基寄存器的设置方法及举例
下面详细描叙了怎样使用片选X基寄存器的处理方法
1、范围用16进制描叙,转换成2的指数,范围必须是2的指数(例如21,22,23,216等等)。
2、设置片选X基寄存器去决定范围。用范围的指数去设置片选X基寄存器。在二进制表示法的片选基寄存器中从Y位开始向左数(Y位为第1位)直到范围的指数位,并将该位置1,仅此位置1。
3、决定基地址,基地址必须是范围的倍数。
4、计算出基地址为范围的倍数值。
基地址/范围=基地址倍数
5、转换基地址的倍数为二进制。
6、在片选X基寄存器中从范围位开始算起向左计数倍数位,并将该位置1。
例如:假设一个16K SRAM的设备必须连在局部总线并且片选必须被提供。基地址假设为24000h,存储器映射如下:
1、将16进制的地址空间范围转换成2的指数形式
例:16K=4000h或214位
2、设置片选X基寄存器的范围值,设置第14位为1。
例:范围为4000h基地址为24000h的片选X基寄存器设置如下:
基地址的设置方法:
1、确定基地址(如24000h);
2、算出基地址为范围的倍数,用16进制进行计算;
例:24000h/4000h=9h
3、将倍值转换成2进制(例1001b);
4、将倍值填在范围的设置位之后,如范围的设置位为第14位,倍值为9h (1001b),则实际基寄存器设置如下:
那么片选范围为4000h,基地址为24000h的完全结果为如下:
第四章功能描叙
§4.1 PCI9052初始化
在电源上电期间,PCI的RST#信号复位PCI9052内部寄存器。而PCI9052也输出局部复位信号(LRESET#)并检查是否存在外部EEPROM。如果存在并且第一个16位字不是FFFFH,则PCI9052加载EEPROM中的数据到PCI9052的内部寄存器中。否则默认值被使用。PCI9052配置寄存器仅能由SEEPROM或PCI主机处理器写。在SEEPROM初始化期间,PCI9052用RETRY信号来响应PCI目标访问。
§4.2 复用
§4.2.1 PCI总线输入信号RST#
PCI总线RST#信号引起所有的PCI总线输出信号浮起,复位PCI9052并且也使PCI9052的局部复位输出信号LRESET#有效。
§4.2.2 软件复位
在PCI总线上的主机能通过控制(置1)CNTRL(50h)的复位位来复位PCI9052和LRESET#有效。PCI和局部配置寄存器的内容不会复位。当软件复位位被置1,PCI9052仅响应对配置寄存器的访问,并且不会响应对局部总线的访问。PCI9052维持复位状态直到PCI主机清掉软件复位位。
§4.2.3 局部总线输出LRESET#
LRESET#在PCI总线的RST#有效(4到10ns延迟)或CNTRL的第30位被置1时有效。
§4.3 串行EEPROM
复位后,PCI9052尝试去读串行EEPROM来判断其是否存在。如果SEEPROM的第一个字不是FFFF,则PCI9052假定设备非空并且继续读。
SEEPROM首先存位每个32位字的最高位。(这在SEEPROM中的第一位为第15位的设备10)25个32位字被顺序存在SEEPROM中。
(注:SEEPROM是用93CXX,PCI9052对93CXX有产家和型号的严格要求,若不对则有可能读不出,详见附录,例NM93C46可用)。
注:2K位设备如93C56是不支持
在PCI总线上的主机能读或写SEEPROM。CNTRL的位[29:24]控制PCI9052引脚来允许读或写SEEPROM位。
对于要重新加载SEEPROM的数据到PCI9052内部寄存器,写1到CNTRL的位29即可。
对于读或写SEEPROM:
1、向CNTRL的第25位写1来使得SEEPROM的CS#有效。
2、由写先写0然后写1来产生SEEPROM的时钟。数据在时钟由0到1的跳变时被读出或写入。
3、发送命令代码到SEEPROM。
4、如果SEEPROM存在,在命令代码之后会返回一个0值。
5、读或写数据。
6、写0到CNTRL的第25位来结束对SEEPROM的访问。
SEEPROM加载顺序,列于表4-1,下列缩写被使用
MSW=高位字[31:16]
LSW=低位字[15:0]
注:PCI9052不支持不能支持连续读和写的SEEPROM(如93C46)。
§4.3.1 串行EEPROM加载顺序
串行EEPROM的加载顺序的详细情况可看PCI9052的DATA SHEET(9052ds.pdf)的第三章表3-1。
§4.4 内部寄存器访问
PCI9052提供几个内部寄存器,提供在总线接口上最大灵活性的设计和性能。寄存器类型如下:
·PCI寄存器(从PCI总线和SEEPROM来访问)
·局部配置寄存器(从PCI总线和SEEPROM来访问)
注:局部配置基地址寄存器可以被限制在存储空间或I/O空间来访问。也可通过CNTRL 寄存器的位[13:12]来禁止访问。
§4.4.1 内部寄存器
设备和产商ID:有2个设备和产商ID集。设备和产商ID位于PCI配置寄存器空间的偏移0。子产商ID和子设备ID位于PCI配置寄存器空间的偏移2ch。设备ID和产商ID用来识别指定的设备和设备制造商。
状态寄存器:包含了PCI总线相关事件信息。
命令寄存器:控制设备去响应PCI访问的能力。它控制设备是否响应I/O空间或存储器空间的访问。
类代码寄存器:识别设备的功能。参见PCI协议的详细说明。
版本ID寄存器(Revision ID Register):从此寄存器读出的值仅映了PCI9052的当前版本。
头类型(Header Type):定义了设备配置头的格式和设备是单功能还是多功能。
Cache线大小:定义系统Cache线大小。
从存储空间访问局部配置寄存器的PCI基地址寄存器:系统BIOS使用这个寄存器去分配一片存储空间给此PCI设备,用来访问PCI9052局部配置寄存器。此PCI地址范围大小为128个字节。在系统初始化时,主机写FFFFFFFF到这个寄存器,然后读回FFFFFF70,如此就得知请求存储空间128个字节。主机然后写具体的基地址到位[31:7]。
从I/O空间访问局部配置寄存器的PCI基地址寄存器:系统BIOS使用这个寄存器去分配一片I/O空间给此PCI设备,用来访问PCI9052局部配置寄存器。此PCI地址范围大小为128个字节。在系统初始化时,主机写FFFFFFFF到这个寄存器,然后读回FFFFFF70,如此就得知请求I/O空间128个字节。主机然后写具体的基地址到位[31:7]。
访问局部地址空间0的PCI基地址寄存器(对空间1,2,3是一样的)系统用此寄存器来分配一块地址空间用来访问局部地址空间0。此地址空间的大小由局部地址空间0范围寄存器中的值决定。其余同上。
PCI扩展ROM基地址寄存器:系统BIOS使用这寄存器来分配PCI地址空间来访问扩展ROM。其大小以及配置的方法同上。
PCI中断线寄存器:用来标识连接到系统的中断控制器的中断线。
§4.4.2 PCI总线访问内部寄存器
PCI9052局部配置寄存器可以用以下两个访问
·通过存储空间来访问
·通过I/O空间来访问
所有PCI读写PCI9052寄存器可以是字节、字、双字。通过存储空间来访问PCI9052寄存器是可以是焠发或非焠发。对于通过I/O空间用焠发方式来访问PCI9052寄存器会引起PCI总线断开。
§4.5直接数据传送方式
PCI主机处理器能直接读写访问局部总线上的设备。在PCI9025的配置寄存器中的一些用来控制译码和重映射对局部地址空间的访问。读和写FIFO允许在PCI总线和局部总线上执行高性能的猝发访问。
§4.5.1直接从方式操作
PCI9052支持对存储空间的猝发访问和从PCI总线对LP空间的单周期访问。PCI基地址寄存器被用来决定PCI存储空间和I/O空间的大小。另外,局部映射寄存器被用来提供从PCI地址空间到局部地址空间的转换。
PCI9052在对直接I/O访问传送一次后断开。对于单周期直接从方式读,PCI9052读一个局部总线长字。对于直接从存储空间访问,可以通过Local Address Space Bus Region Descriptor寄存器来允许或禁止猝发读预取。如果读预取被禁止,PCI9052在一个读传送之后断开。如果预取被允许,读预取大小可以通过局部PCI9052能通过一个控制寄存器CCNTRL:50Hqu 去执行延迟读,如同PCI2.1版协议所述。
§4.5.1.1 PCI2.1方式
PCI9025能通过对局部仲裁器和PCI方式寄存器的编程来执行延迟读。
图4—1 PCI specification v2.1 Delayed reads
另外对于延迟读,PCI9052支持如下PCI 2.1版协议功能:
当读被挂起时(RETRY是对应读)不产生写
写并且flush挂起读
PCI9052也支持先读方式(参看图4—2),预取的数据能从PCI9052内部FIFO读出,代替从局部总线。此地址必须是连读的并且必须以32位为边界(即下一个的地址=当前地址+4)
图4—2 PCI9052先读方式
PCI9052能被编程产生等待状态来维持PCI总线,如果写FIFO满时,TRDY声明无效。(参看图4—3与4—4)
图4—3直接从设备写
对于直接从方式写,PCI(主控)写数据到局部总线。
图4—4直接从设备读
对于直接从设备读,PCI(主设备)从局部总线(从设备)读数据。
PCI9052对于空间0,1和外部ROM空间支持on-the-fly字节通路转换。此局部总线可以通过编程内部寄存器来配量大/小字节
注:PCI总线总是小Endian。
§4.5.1.2PCI对局部地址映射
5个局部地址空间(局部空间0—3和外部ROM)被从PCI总线来访问。一个4个寄存
器集合定义了每个空间,以及相应局部空间的特性:
●PCI基地址(PCI Base Address)
●局部范围(LOCAL RANGE)
●局部基地址(LOCAL BASE ADDRESS)
●局部总线区域描述符(LOCAL BUS REGION DESCIPTOR)
对字节允许(LBE[3:0]#,引脚46—49)引脚译码来配置总线宽度。
32位总线4个字节允许引脚知识了哪一个数据字节有效。
LBE3#字节允许3=LAD[31:24]
LBE2#字节允许2=LAD[23:16]
LBE1#字节允许1=LAD[15:8]
LBE0#字节允许0=LAD[7:0]
16位总线CBE[3,1:0]#被译码来提供BHE#,CA1,和BLE#:
LBE3#字节允许(BHE#)=LAD[15:8]
LBE2#未用
LBE1#地址位1=(LA1)
LBE0#字节允许(BLE#)=LAD[7:0]
8位总线LBE[1:0]#被译码来提供LA[1:0]
LBE3#未用
LBE2#未用
LBE1#地址位1=LA1
LBE0#地址位0=LA0
每个PCI到局部地址空间在复位初始化时被定义。
局部总线初始化软件:
PCI对局部总线空间PCI地址位指定的范围被用来译码的访问。每个这些位都被对应起来,位引对应地址位引。所有写1的位被用来译码,写0的位被忽略。
重映射PCI地址到一个局部地址:此寄存器中位被用来将PCI地址位译码映射到局部总线地址位上。
Local Bus Region Descriptor指定了局部总线特性,如总线宽度,猝发,预取,和几个等待状态。
PCI初始化软件:PCI主机总线初始化软件通过写PCI Base Address Register写全1然后,读回一个值来决定请求的地址空间。PCI9052在不需要的地址位返回0,来指定请求的地址空间。PCI软件通过编程PCI Base Address Register来映射局部地址空间到PCI地址空间。
例如:一个IMB局部地址空间02300000h到023FFFFFH被LLPCI总线的PCI地址78900000h到789FFFFFH来访问。
1.在SEEPROM按如下方式设置范围和Local Base Address Register
范围=FFF00000h(1MB,译码高PCI地址的高12位)
局部地址(重映射)=023xxxxxh(对于PCI到局部的局部基地址访问)2.PCI初始化软件写全1到PCI基地址寄存器,然后读取返回值。PCI9052返回一个FFF00000H。PCI软件写PCI基地址寄存器:
PCI基地址=789xxxxxh(PCI基地址用来访问局部地址空间)
§4.6 PCI的中断(INTA#)
用户能用局部中断引脚LINTi1和LINTi2和软件中断(CNTRL寄存器位30)来产生
研华大数据采集卡PCI-1710快速入门手册簿
PCI-1710快速安装使用手册 PCI-1710快速安装使用手册 (1) 第一章产品介绍 (2) 1.1 概述 (2) 1.1.1 即插即用功能 (2) 1.1.2 单端或差分混合的模拟量输入 (2) 1.1.3 卡上FIFO(先入先出)存储器 (2) 1.1.4 卡上可编程计数器 (2) 1.1.5 用于降低噪声的特殊屏蔽电缆 (3) 1.1.6 16路数字输入和16路数字输出 (3) 1.1.7 短路保护 (3) 1.2 特点: (3) 1.3 一般特性: (3) 第二章安装与测试 (3) 2.1 初始检查 (3) 2.2 Windows2K/XP/9X下板卡的安装 (4) 2.2.1 软件的安装: (6) 2.2.2 硬件的安装: (7) 2.3 测试 (8) 2.3.1 模拟输入功能测试 (8) 2.3.2 模拟输出功能测试 (9) 2.3.3 数字量输入功能测试 (10) 2.3.4 数字量输出功能测试 (11) 2.4.5 计数器功能测试 (12) 第三章信号连接 (13) 3.1 模拟信号输入连接: (15) 3.1.1 单端模拟输入连接 (15) 3.1.2 差分式模拟输入连接 (15) 3.2模拟信号输出连接 (17) 3.3触发源连接 (17) 3.3.1 部定时器触发连接 (17) 3.3.2 外部触发源连接 (18) 第四章例程使用详解 (18) 4.1 板卡支持例程列表 4.2 常用例子使用说明 (18) 4.2.1 ADSOFT/ADTRIG(软件触发方式例程) (18) 4.2.2 ADint(中断方式进行数据采集的例程) (19) 4.2.3 DIGOUT(数字量输出): (21) 4.2.4 COUNTER(计数程序) (23) 4.2.5 Digin (数字量输入例程) (24) 4.2.6 PULSE(脉冲输出例程) (24) 4.2.7 MADint(多通道中断采集例程) (25) 第五章遇到问题,如何解决? .................. 错误!未定义书签。
政府节能减排专项基金为企业进行节能改造所用节电设备为凌华电能优化管理系统原理(参考Word)
合作操作模式:深圳凌华公司多年来从来节能环保产品的心血结晶品。再结合了国家相关支持政策,在全力支持执行国家政策外,还结合了国内的用电企业实际情况,充分利用专项节能环保基金的情况下,不用企事业单位作相关的资金投入就能达到节能改造和降低能耗。实现了达到国家要求的节能降耗政策的同时,又能帮企事业单位达到了节能降耗,降低生产运营成本,提高了企业的竞争能力。 一、产品概述 “FB-I”型电能优化节电设备是凌华公司运用全新的设计理念,集国际上先进的移相电磁平衡技术和“平衡控制环形线圈”技术于一体的高效能高质量的高科技节电产品,它将电气设备上的电压和电流控制在最佳使用功率上,自动调整电气设备的耗电功率,从而达到节电之目的,填补了国内空白,其专利源于日本及韩国,凌华公司综合其产品优点,采用先进的电磁平衡原理使三相输出的电压、电流趋于平衡和稳定,并可调整超标电压、降低起动电流、抑制谐波、过滤浪涌和瞬流等,从而改善用电品质,同时提高用电设备的使用效果,延长其使用寿命。 节电,是相对于浪费而言的,如果没有浪费就没有节约用电,所以节约不等于节省,不是少用、不用,而是要合理高效的使用电能。避免显性浪费与隐性浪费。系统节电技术主要针对电能系统进行节电改造,系统性的解决三相不平衡、谐波污染、电压波动等导致低压电力系统电能浪费的主要因素。深圳凌华公司专门针对国内的电网和用电客户的实际情况研发而成的,具有应用范围广、节电效果好、回报周期快、安装维护简单等优点,是节电行业目前最新型的;高性价比的;节能科技产品,也是深圳凌华公司多年来从来节能环保产品的心血结晶品。再结合了国家相关支持政策,在全力支持执行国家政策外,还结合了国内的用电企业实际情况,充分利用专项节能环保基金的情况下,不用企事业单位作相关的资金投入就能达到节能改造和降低能耗。实现了达到国家要求的节能降耗政策的同时,又能帮企事业单位达到了节能降耗,降低生产运营成本,提高了企业的竞争能力。 二、产品结构及功能特性 1、设备外观
钢化炉简易操作使用说明
钢化炉简易操作使用说明 (2) 主工作界面 (3) 参数控制界面 (5) 高级参数设置界面 (8) 加热控制界面 (9) 自动升温控制界面 (10) PLC手动控制界面 (11) PLC状态显示界面 (12) 报警显示界面 (14) 开机显示界面 (15) 风路状态显示界面 (15) 一般性故障排除 (16) 操作安全注意事项: (17)
钢化炉简易操作使用说明 该钢化炉控制系统是由我公司参考当前行业多家最先进的钢化炉控制系统核心理念,完全自主研发的一个全新的控制操作系统,该系统的核心部分由上位机和可编程控制器组成,外加一些辅助动作器件,上位机采用研华工控机和通讯板卡组成通信控制中心,主要的人机界面在这里处理,包括温度控制,参数修改,控制显示,详细的报警显示,帮助信息提示功能。 下位机部分运动控制核心是由可编程序控制器提供,主要是依照上位机提供的参数进行钢化炉动作逻辑控制,连续的辅助控制,玻璃钢化过程中的各种辅助动作控制。 首先介绍钢化炉的控制系统特点,钢化炉控制系统主要由四部分组成; 一、工作状态显示及基本控制参数显示界面,称为主工作页 面; 二、二级参数及基本底层状态显示界面,称为参数控制界面; 三、高级参数控制界面,系统安全性、系统维护工作主要在 这里控制; 四、辅助工作界面分控制界面和状态显示界面,报警显示界 面,启动画面,退出画面,自动升温控制界面。
主工作界面 该界面主要显示钢化炉的各种工作状态,工作模式,可当场设置的对流风机的速度,各个环节的运动速度,三个工作阶段的主风机的工作速度,各个状态的时间进度,系统自动测量的玻璃长度,当前的控制温度和系统的设置温度。用户登录状态信息及按钮,其它工作界面的切换按钮,设置温度和实际温度、开关控制状态对比指示组,三个上部空间温度,三个下部空间温度,加热1剩余时间,加热2剩余时间,加热3剩余时间,钢化剩余时间,冷却剩余时间,各个工作状态指示灯,玻璃在炉里位置。
AGV控制板卡的设计
题目:AGV控制板卡的设计 学生姓名高志伟 学号200715010133 班级电气071501 所属院(系)电子信息工程学院 指导教师刘红兵 2011年6月16日
太原科技大学毕业设计(论文)任务书 学院(直属系):电子信息工程学院时间:2011年3月15日学生姓名高志伟指导教师刘红兵设计(论文)题目AGV控制板卡的设计 主要研究内容1、了解AGV控制系统的结构 2、掌握单片机原理及应用 3、掌握模拟滤波和数字滤波 4、学习C语言编程 5、了解单片机硬件、软件的设计方法 研究方法理论分析、硬件设计、软件设计、系统调试 主要技术指标(或研究目标)1、设计一个单片机信号采集卡 2、16路模拟量输入信号、带隔离放大 3、8路模拟输入信号、带多路转换、光电隔离 4、设计LED数码动态显示电路,用于指示各回路的工作状态 5、编制相关的应用程序 教研室 意见 教研室主任(专业负责人)签字:年月日
目录 摘要............................................................................................................................III 第1章绪论 (1) 1.1论文研究的背景及意义 (1) 1.2自动导引小车的定义及特点 (2) 1.3AGV的导引方式 (3) 1.4自动导引小车的发展简史 (4) 1.5自动导引小车的应用现状 (6) 1.6AGV的关键技术及本论文的研究内容 (7) 1.6.1自动导引小车的关键技术 (7) 1.6.2本论文研究的主要内容: (7) 1.7本章小结 (8) 第2章AGV结构简介及板卡概述 (9) 2.1控制系统的分类 (9) 2.1.1嵌入式控制系统 (9) 2.1.2顺序控制系统 (9) 2.1.3过程控制系统 (9) 2.2AGV结构简介 (10) 2.3AGV的系统组成 (11) 2.4认识板卡 (12) 2.4.1什么是板卡 (12) 2.4.2数据采集卡 (12) 第3章AGV控制板卡的主要元件选取 (15) 3.1单片机的选取 (15) 3.1.180C51系列单片机 (15) 3.1.2TMS320 (19) 3.1.3PIC (19) 3.1.4AVR (20)
凌华科技发表高端四轴运动控制卡PCI
凌华科技发表高端四轴运动控制卡PCI- 凌华科技发表高端四轴运动控制卡PCI-8154 产业计算机应用平台供货商-凌华科技凌华科技推出高端四轴四轴运动控制卡PCI-8154,提供四轴脉冲输出,脉冲信号输出信号输出频率高达6.55MHz,可控制伺服马达、步进马达及线性马达。凌华PCI-8154轴控卡采用模块化设计,除了运动控制功能,其它功能如分布式I/O控制、高速触发信号输出以及电子凸轮控制等,可通过使用凌华延伸子板得以实现。?通过分布式I/O子板,用户可以把集中式轴控与分布式I/O控制整合于一个控制器中。高速的触发信号子板能够提供高达2MHz的触发信号,子板提供大量内存空间,可储存高达两百万个位置比较点,十分适合高端线性扫描的应用。?? ?凌华PCI-8154轴控卡提供13种归零模式与背隙补偿功能。利用配线控制器串接还可实现跨卡多轴的同动同停功能。凌华PCI-8154轴控卡针对安全性考虑,提供硬件急停功能,当有紧急事故发生时,用户利用急停开关控制,控制器立即停止脉冲信号输出,直到状况解除。?凌华PCI-8154轴控卡与其它凌华轴控卡相同,适用于三菱、松下及安川伺服驱动器与步进电机。若搭配硬件连续运动功能,可在连续运动轨迹应用中,进行平滑运动。更多产品信息,请浏览凌华科技企业网站:/IA。??关于凌华?凌华科技致力于量测、自动化及计算机通讯科技之改进及创新,提供解决方案给全球网络电信、智能交通及电子制造电子制造客户。凭着对专业技术的执着与实践客户承诺的自我要求,领先业界推出多项
创新性产品,获ISO-9001、ISO-14001、TL9000等多项认证,并为国内工业计算机业界唯一导入6 Sigma并通过国际大厂专业稽核的生产体系。凌华科技为Intel? 通讯联盟一级会员, PICMG协会可参与制定规格的会员,与PXI Systems Alliance协会董事会及最高等级会员,并于2005年加入LXI Consortium。目前在美国、新加坡、中国设有子公司,在印度、德国与韩国设有办事处,为当地客户提供快捷服务和实时支持。凌华科技(中国)有限公司为电子制造、电信交通、政府电子客户提供高性价比产品和专业服务。期能通过深耕行业市场,成为中国产业应用电脑领导品牌。
研华PCL-818系列板卡中文手册
PCL-818HD/HG/L快速安装使用手册 PCL-818HD/HG/L快速安装使用手册 (1) 第一章产品介绍 (2) 1.1 概述 (2) 1.1.1自动通道增益/扫描 (2) 1.1.2 板卡ID (2) 1.2共有特点 (3) 1.3 一般特性 (3) 第二章 安装与测试 (3) 2.1 初始检查 (3) 2.2 开关和跳线的设置 (3) 2.2.1 基址的选择 (4) 2.2.2通道设置 (4) 2.2.3 DMA通道选择 (5) 2.2.4定时器时钟选择 (5) 2.2.5 D/A基准电压选择 (5) 2.2.6内部基准电压源选择 (6) 2.2.7 EXE.trigger和GATE0的选择 (6) 2.2.8 FIFO打开/关闭选择 (7) 2.2.9 FIFO中断选择 (7) 2.2.10 数字输出20引脚或37引脚选择 (7) 2.3 引脚图 (8) 2.4 Windows2K/XP/9X下板卡的安装 (9) 2.4.1 软件的安装: (9) 2.4.2硬件的安装: (11) 2.5 测试 (17) 2.5.1模拟输入功能测试 (18) 2.5.2 模拟输出功能测试 (19) 2.5.3 数字量输入功能测试 (20) 2.5.4数字量输出功能测试 (21) 2.5.5计数器功能测试 (22) 第三章 信号的连接 (23) 3.1 模拟信号输入连接 (23) 3.1.1 单端模拟信号输入连接 (23) 3.1.2 差分模拟信号输入 (24) 3.2 模拟输出连接 (25) 3.3 数字信号连接 (25) 第四章 例程使用详解 (26) 4.1 板卡支持例程 (26) 4.2 常用例子使用说明 (26) 4.2.1 ADSOFT/ADTRIG(软件触发方式例程) (26) 4.2.2 ADint(中断方式进行数据采集的例程) (27) 4.2.3 DIGOUT(数字量输出): (29) 4.2.4 COUNTER(计数程序) (31)
研华插入式IO板卡培训教材初级
研华插入式IO板卡培训教材初级 1、研华插入式IO产品简介。 研华插入式IO卡片,指的是能够插入计算机系统插槽的数据采集板卡。这种板卡是计算机系统和外部进行数据交换和信息获取的一种渠道,也在现代工业控制现场被大量采用。下面的内容里,我们将对这种产品进行详细的介绍。 2、插入式IO产品的分类。 研华插入式IO产品(以下简称DAS卡)可以按照不同的分类标准进行,下面我们进行分别介绍。 2.1、按照总线的分类。 研华的DAS卡可以适应目前工业控制用计算机的多种总线形式,具体来说,包括ISA、PCI、CPCI、USB、PC-104等几种,下面我们进行分类介绍。 2.1.1、ISA总线简介。 ISA总线(Industry Standard Architecture:工业标准体系结构)是IBM公司为PC/AT电脑而制定的总线标准,为16位体系结构,只能支持16位的I/O设备,数据传输率大约是8MB/S。也称为AT标准。 ISA插槽是基于ISA总线(Industrial Standard Architecture,工业标准结构总线)的扩展插槽,其颜色一般为黑色,比PCI接口插槽要长些,位于主板的最下端。其工作频率为8MHz左右,为16位插槽,最大传输率16MB/sec,可插接显卡,声卡,网卡已及所谓的多功能接口卡等扩展插卡。其缺点是CPU资源占用太高,数据传输带宽太小,是已经被淘汰的插槽接口。目前还能在许多老主板上看到ISA插槽,现在新出品的主板上已经几乎看不到ISA插槽的身影了,但也有例外,某些品牌的845E主板甚至875P 主板上都还带有ISA插槽,估计是为了满足某些特殊用户的需求。
研华采集卡使用培训资料
LabView Driver Guide
The procedure should be as following. Install Labview6/6i/7/7.1 Application Install Advantech Labview Driver from CD Install Advantech I/O card(driver/Hardware) Check the Support list in the manual to know what card and function/example can be supported Access the example in the path: C:\Program Files\National Instruments\LabVIEW 7.1\examples\Advantech Refer to the example to write own program
The support list for the card
Get voltage input from PCL-818L(1) 1. Click “New VI” button to create a new LabVIEW program. 2. Select Front Panel & enable Controls Palette to choose a “Waveform Chart” indicator in “Graph”group, add to front panel and name it “Voltage”.
凌华科技ADLINK 智能相机NEON-1040_Datasheet
https://www.wendangku.net/doc/028983828.html,/cn Vol. S141- 2 NEON-1040/1020 新一 基于x86四核处理器的 能 机
简 介 凌华科技最新一代x86架构的智能相机NEON-1040/1020采用400万像素60fps的全局曝光传感器和Intel?Atom? 1.9GHz四核处理器,体积更小,并且支持IP-67等级防护标准。四核的CPU处理器,不仅让性能表现更加出众,同时FPGA协处理器和GPU,更能让图像处理性能得到完美的提升,全面超越传统的智能相机。丰富的软件支持和API兼容性能,可以让您轻松地从原有的x86平台进行移植,并且没有跨平台的软件和语言开发负担,协助用户缩短产品上市时间,抢占市场,提升竞争优势。 All-in-one 解决方案,紧凑的尺寸、适中的计算性能和有限的分辨率开放架构,多通道、灵活、高性能的解决方案 凌华科技最新一代x86 架构的智能相机 NEON-1040/1020 高性能、加固结构和灵活特性 的完美整合 传统智能相机视觉平台+工业相机
超高性能,处理速度和采样精度的完美提升 检测 高 四核处理器 Intel ? Atom? E3845 1.91GHz 四核处理器可以 强的处理性能, 上的 能 机, 计算性能可以 6 。 采用400万像素60fps 1英寸的全局快门(Global shutter)传感器, 快门(rolling shutter),可以 图像的清晰 ,以 高速检测的 。 性能 Passmark CPU 分数 OCR VGA LUT ROI IP67等级防 用的 构 计,满足IP67等级的外壳和M12连接器, 得NEON-1040/1020具备防 防 的 性,可以在 的环境 工作。 CPU,GPU,FPGA 处理器, 速图像预处理 图像 可以 非 机灵 导 的 常现 。 LUT ( ,look up table) 在 有 定信息 的 处理图像,用于解决非 线的 , 和 。 ROI (感 ,region of interest) 可以 的部分 ,以 高检测的 率。 执行 OCR ( 识 ,optical character recongnition )和条形码扫描的 作,同时 行定 检测,识 和验 。 H.264编码 和传 速 , 体 有 。 NEON-1040/1020的FPGA 处理器可以 速图像预处理, CPU 的 ,非常适合复杂的图像采集处理,如LUT ,ROI 感 和 。 于FPGA 的 同工作,CPU 可以集 在算法上,并可以 检测任务 高 。 ADLINK TECHNOLOGY INC 图像 , 或大图片的大 可能 检 ,并 用过多的CPU 。
板卡(ISA,PCI)
板卡(SIA/PCI) 常见问题解答 北京亚控科技发展有限公司 2009年7月
目录 1. 板卡通用 (1) 1.1 为什么我的组态王软件连接所有的板卡驱动信息窗口都提示“打开设备信息失败”? (1) 1.2 请问组态王软件在建立板卡设备时板卡地址是如何设定的? (1) 1.3 我注意到组态王软件在建立板卡设备时某些板卡需要设定初始化字,这是怎样设置的? (1) 1.4 我需要使用多串口扩展卡,USB转串口卡等一些进行串口转换扩展类的板卡,请问组态王有其驱动吗? (1) 1.5 板卡输出,在组态王运行系统中执行写操作之后,为什么板卡不响应(并不输出)? (1) 1.6 板卡的滤波方式是如何定义的? (2) 1.7 板卡的计数器工作模式是如何定义的? (2) 1.8 我的16位板卡送到组态王中的原始数据为0-65535,但是组态王中工程值我需要按100-4这样变化,定义时最小值不能比最大值大,如何解决?..2 1.9 在组态王中建立带有8255芯片的板卡时,初始化字应如何设置? (2) 1.10 组态王支持哪些厂家的运动控制卡? (3) 2. 中泰板卡系列 (4) 2.1 中泰PCI 8360板卡与组态王通讯,信息窗口提示初始化失败,应如何解决? (4) 3. 研华板卡系列 (4) 3.1 使用研华PCL731板卡与组态王进行通讯,A0、B0、C0做为输出,A1、B1、C1做为输入时初始化字应如何设置? (4) 3.2 研华PCI板卡的具体地址是如何配置的? (4) 3.3 对于722板卡(带8255芯片的板卡)如何设置初始化字? (4) 3.4 研华PCL818L的计数器在组态王中如何作用? (5) 3.5 研华PCI1713板卡与组态王进行通讯,组态王设备地址是如何定义的? (5)
YAMAHA贴片机各种控制板卡介绍
YAMAHA贴片机各种控制板卡介绍 Mother Board Mother Board将所有的控制器通过ISA-Bus(电源和信号)连接在一起,同时具备有AC&DC电压检查功能,它检查AC输入(从100V转换成12V)和DC输入(5V, +12V, -12V),并且用LED来显示电压低或电源其他错误。 Servo Board Servo Board用来控制贴片机的伺服马达,如果Servo Board检测到错误,绿色LED会不亮并且机器会进入急停状态。 如果机器软件运行正常,黄色LED会闪亮,状态如下:初始化前4秒(亮2秒,灭2秒),初始化后1秒(亮0.5秒,灭0.5秒)(XG,X,II系列机器) 如果编码器线断,红色LED灯会亮。 System Board 符合PICMG标准 影像功能支持LCD/CRT显示器 支持标准接口(1个键盘,1个鼠标,串口,并口,E-IDE接口,软驱接口和USB接口)。 Driver Board Driver Board 受Servo Board 控制,向伺服马达提供动力,1个Driver Board最大可以驱动7个交流伺服马达。 D.power assy.
D.power assy. 向Driver Board提供直流+282V电压 检测电压变化,电源缺相和高温。 Appl Board Appl Bord 和其他一些I/O板(Head Board和CONV Board)一起来控制串行通信。 Vision Board Vision Board 用来识别处理吸取后的元件,PCB板上的MARK并计算位置和方向。 最多可接3个模拟I/F相机和3个数字I/F相机。 I/O conveyor Unit I/O conveyor Unit 包括2块板,用来处理传送部分数字输入输出信号。 I/O BOARD CONVEYOR ASSY (KM5-M4582-xxx) I/O BOARD CORE ASSY (KM5-M4560-1xx) Connection board kit Connection board kit用来控制传送带马达,提供DC24V 用在紧急停止状态中。用LED显示急停情况,详细含义参考Emergency stop state check list I/O Head assy. I/O Head assy.用来处理贴片机头部的数字输入,输出信号。 包括两块块: I/O BOARD HEAD ASSY (KV8-M4572-00x) I/O BOARD CORE ASSY (KM5-M4560-1xx)
基于研华数据采集卡的labview程序设计.doc
第10章基于研华数据采集卡的 L a b V I E W程序设计 本章利用研华公司的PCI-1710HG数据采集卡编写LabVIEW程序,包括:模拟量输入、模拟量输出、开关量输入以及开关量输出等。 10.1 模拟量输入(AI) 10.1.1 基于研华数据采集卡的LabVIEW程序硬件线路 在图10-1中,通过电位器产生一个模拟变化电压(范围是0V~5V),送入板卡模拟量输入0通道(管脚68),同时在电位器电压输出端接一信号指示灯,用来显示电压变化情况。 图10-1 计算机模拟电压输入线路 本设计用到的硬件为:PCI-1710HG数据采集卡、PCL-10168数据线缆、ADAM-3968接线端子(使用模拟量输入AI0通道)、电位器(10K)、指示灯(DC5V)、直流电源(输出:DC5V)等。 10.1.2 基于研华数据采集卡的LabVIEW程序设计任务 利用LabVIEW编写应用程序实现PCI-1710HG数据采集卡模拟量输入。 任务要求: (1)以连续方式读取电压测量值,并以数值或曲线形式显示电压测量变化值;
第10章基于研华数据采集卡的LabVIEW程序设计(2)当测量电压小于或大于设定下限或上限值时,程序画面中相应指示灯变换颜色。 –209 –
LabVIEW 虚拟仪器数据采集与串口通信测控应用实战 – 210 – 10.1.3 基于研华数据采集卡的LabVIEW 程序任务实现 1.建立新VI 程序 启动NI LabVIEW 程序,选择新建(New )选项中的VI 项,建立一个新VI 程序。 在进行LabVIEW 编程之前,必须首先安装研华设备管理程序Device Manager 、32bit DLL 驱动程序以及研华板卡LabVIEW 驱动程序。 2.设计程序前面板 在前面板设计区空白处单击鼠标右键,显示控件选板(Controls )。 (1)添加一个实时图形显示控件:控件(Controls )→新式(Modern )→图形(Graph ) →波形图形(Waveform Chart ),标签改为“实时电压曲线”,将Y 轴标尺范围改为0.0-5.0。 (2)添加一个数字显示控件:控件(Controls )→新式(Modern )→数值(Numeric )→ 数值显示控件(Numeric Indicator ),标签改为“当前电压值:”。 (3)添加两个指示灯控件:控件(Controls )→新式(Modern )→布尔(Boolean )→圆形指示灯(Round LED ),将标签分别改为“上限指示灯:”、“下限指示灯:”。 (4)添加一个停止按钮控件:控件(Controls )→新式(Modern )→布尔(Boolean )→停止按钮(Stop Button )。 设计的程序前面板如图10-2所示。 图10-2 程序前面板 3.框图程序设计——添加函数 进入框图程序设计界面,在设计区空白 处单击鼠标右键,显示函数选板(Functions )。 在函数选板(Functions )下添加需要的函数。 (1)添加选择设备函数:用户库→ Advantech DA&C (研华公司的LabVIEW 函数库)→ EASYIO → SelectPOP → SelectDevicePop.vi ,如 图10-3 SelectPop 函数库
运动控制卡简介
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
研华工控机资料
广州市拓创电子科技有限公司简介 广州市拓创电子科技有限公司是一家集专用计算机研发、制造、销售、服务为一体的生产厂商。在CPU卡(SBC)、嵌入式工业主板、工业机箱、无源底板、工业电源、一体化工作站、工业平板电脑(PPC)、网络安全硬件平台、工业电脑配件等产品的服务上,拓创工控拥有强大的自主研发能力、完整的产品生产能力和遍布全国的销售及服务网络。一直努力为工业自动化、交通(轨道交通、交通收费等)、军工、医疗、金融、冶金、铁路、航空、、安防通讯、电力(新能源)、电信、网络、视频监控、信息家电、多媒体应用、游戏等多种领域与行业的企事业及研发单位提供专业的嵌入式硬件平台与工业通讯方案和专业产品及技术服务。 拓创工控的技术始终立足世界:依托超前意识的核心研发能力;积极创造、持续创新的不竭动力,使得拓创工控始终能以尖端技术、卓越产品立足于工业电脑行业前沿。公司业务逐年递增,迅猛发展,产品销售额和市场覆盖率始终处于行业前列。 面向用户、面向应用、面向产品,拓创工控对合作伙伴及终端厂商提供个性化的定制服务。放眼未来,拓创工控会再接再厉,以更优秀的产品、更完美的服务来回报社会。 广州市拓创电子科技有限公司欢迎新老客户致电垂询,我们将为您提供真诚、周到的服务!! 广州市拓创电子科技有限公司1306428345@https://www.wendangku.net/doc/028983828.html, sale@https://www.wendangku.net/doc/028983828.html, https://www.wendangku.net/doc/028983828.html, 地址:广州市天河区水荫一横路2号金企商务中心2层 电话:020-******** 87228962 133******** 传真:020-********-8003
研华工业平板电脑(TPC-1261H) 产品简介 TPC-1261H 12.1"SVGA TFT LCD AMD GX3触摸式平板电脑 Main Features 板上集成AMD GX3 LX800处理器 12.1"SVGA TFT LCD 镁铝外壳超薄设计 无风扇冷却系统 前面板符合NEMA4/IP65标准 支持Microsoft?Windows?XP/https://www.wendangku.net/doc/028983828.html,/XP Embedded 自动RS-485数据流量控制 产品介绍 TPC-1261H嵌入式平板电脑带有一个高质量的TFT LCD显示屏,使用的处理器AMD LX800为其核心。AMD LX800是一款低功耗的处理器,工作频率为500MHz.因此该系统在提供强大功能的同时采用了无风扇设计,使系统运行更加可靠。此外,TPC-1261H采用了无运动部件的存储方案,是一套持久耐用的可靠平台。对于不需要使用无运动部件的存储应用,则可以使用一块硬盘,此硬盘的安装非常方便。它还提供了一个PC/104扩展槽,用于特殊要求下的扩展。 同类产品: 超薄型工业平板电脑:PPC-S155T 多功能工业平板电脑:PPC-177T,PPC-174T,PPC-155T,PPC-154T,PPC-125T 无风扇工业平板电脑:PPC-L157T,PPC-L156T,PPC-L128T,PPC-L127T,PPC-L106T,PPC-L61T 嵌入式工业平板电脑:TPC-1780H,TPC-1570H,TPC-1270H,TPC-1261H,TPC-1070H 以上平板电脑均有货,欢迎前来询价!
凌华采集卡labview下操作步骤
凌华采集卡labview下操作步骤演示 首先保证安装的两个驱动版本是最新版驱动程序 1.正确安装DAQPilot(V 2.2.0.0125)和DAQMaster,前者是驱动程序和程序部分,后者主 要功能是管理软件用来设置板卡的设备号。 2.在安装好板卡及以上驱动程序后,到设备管理器里确认安装的采集卡上没有感叹号或问 号,如果有更新下驱动程序。 3.DAQPilot下有两种编程方式: a)使用Express VI编写测试程序(无需使用DAQMaster),只需打开程序,然后按照 以下图示操作。 然后选择你要控制的功能 比如7233是一块全数字量输入卡 我们就选择\Program Files\ADLINK\Samples\LabVIEW\Express\Digital Input文件夹下 点击如下应用程序
选择如下图显示程序框图 可以看到程序面版如下
然后双击中间的模块如下: 点击Modify进行配置类似如下示图
然后一直点击Next,直到Finish 然后点击labview环境运行按钮,数据就会出现在前面板的表格里。b)使用Polymorphic VI编写程序,需要首先配置DAQMaster,操作如下图: 点击打开后,还需点击几个图标
左上角的展开图标和带红色字母A的图标就会显示主机里安装的所有板卡了,我的电脑里没有板卡,所以只显示了一个虚拟设备,且设备号是Dev0,此设备号就是我们需要为板卡设置的,我们在Dev0上右键点击选择Edit,出现如下图 假如我们机器里差了块7233我们可以重新起个名字例如Dev1.然后点击确定。此时DAQMaster工作就做玩了。 我们打开测试程序
研华工控机——基础教程
研华工控机基础教程(完整版) 第一部分 引言 工业控制计算机,中文简称工控机,英文简称IPC(Industry Personal Computer),在工业自动化背景下应运而生。伴随着PC产业的发展,得到了长足的发展。尽管IPC在架构上也是基于X86为主,在用户使用端和PC电脑产业相同,但与个人PC电脑产业的发展却完全是不同的道路。个人PC通常分为家用电脑和商用电脑两大类。对于家用电脑,是以时尚的外形、较高的显卡性能、多媒体显示性能、丰富的扩展性能、多声道声卡等方面作为吸引消费者的卖点,有些高档家用电脑甚至配备遥控器,时尚的音响,俨然一个家庭多媒体中心。对于商用客户,则是通过稳重的外观、完备的售后服务、有限的扩展性能、高速度的运算速度等来吸引商用客户采购。 工控电脑是完全不同的设计理念,工控电脑更多的是在恶劣的环境下使用,对产品的易维护性、散热、防尘、产品周期、甚至尺寸方面都有着严格的要求。因此在设计和选择工控机平台的时候,考虑的更多的是机构的设计,然后才是对性能等的考虑。 第二部分 正文 一、工控机的设计分析与选择。 1、工控机的尺寸设计 工控机在很多情况下使用是应用于某个系统之中,因此常常被放置在某个设备之中或上架。因此对尺寸有较严格的要求。根据用户的使用情况,分为上架式和壁挂式两种设计。 上架式:现在市场上最为常见的研华工控机IPC-610就是标准的4U高度19英寸上架式机箱。可以应用在标准的机柜之中。如图1所示: <图1> IPC-610H 针对客户的不同需求,我们会提供1U、2U、3U、4U、5U和7U高度的机箱。 一般来说,在1U或2U的机构设计上面。由于机箱体积有限,但CPU的功耗日益加大(最新的P4CPU功耗已超过100W),因此内部散热风流设计变成了厂商面临的最大问题。而机构散热设计的功力在很大程度上反映了 一个厂商的技术实力。(关于机构散热的设计我们会在后期的文章中讨论)。 对于1U工控机,多用于对体积要求较高的电信领域,大多配合上架使用,工控机厂商通过PICMG1.0架构的CPU卡的体积优势,配合1U高度的蝶型底板,可支持最高2个PCI全长卡。从而满足某些要在1U机箱中集成某些特殊规格卡的用户需求。 对于4U,7U的机构设计,由于机箱的体积变大,在狭小机箱中面临散热因素已不是主要考
研华PCI-1716
如何在labview下使用研华板卡?(适用于所有 ISA 和PCI 系列模拟量和数字量采集卡) 答:研华所有das卡都可以在labview下使用。 Labview驱动是建立在32bitDLL驱动基础之上的,见下图。 所以要安装labview驱动先要安装32bitDLL驱动。包括devicemanager和对应板卡的DLL 驱动,然后再安装对应的labview驱动。具体步骤如下: 2.3.1.1 安装Device Manager和32bitDLL驱动 注意:测试板卡和使用研华驱动编程必须首先安装安装Device Manager和32bitDLL 驱动。 第一步:将启动光盘插入光驱; 第二步:安装执行程序将会自动启动安装,这时您会看到下面的安装界面: 图2-1
注意:如果您的计算机没有启用自动安装,可在光盘文件中点击autorun.exe文件启动安装程 第三步: 点击CONTINUE,出现下图界面(见图2-2)首先安装Device Manager。也可以在光盘中执行\tools\DevMgr.exe直接安装。 图2-2 第四步:点击IndividualDriver,然后选择您所安装的板卡的类型和型号,然后按照提示就可一步一步完成驱动程序的安装。 图2-3 2.3.1.4 labview驱动程序安装使用说明 研华提供labview驱动程序。注意:安装完前面步骤的Device Manager和32bitDLL 驱动后labview驱动程序才可以正常工作。光盘自动运行点击Installation再点击Advance Options 出现以下界面(见图2-6)。点击: LavView Drivers来安装labview驱动程序和labview驱动手册和示例程序。
研华工控机型号规格
一.1 产品名称| 原装机IPC-510 产品品牌| 研华 产品产地| 台湾 产品简介| 4U 上架式整机/前置USB/ PS/2 2 产品名称| 原装机IPC-610L 产品品牌| 研华 产品产地| 台湾 产品简介| 4U 15槽上架式整机,支持前部可访问风扇 一.3 产品名称| 原装机IPC-610H 产品品牌| 研华 产品产地| 台湾 产品简介| 4U上架式机箱,支持LED指示& 声音警报通知 4 产品名称| IPC-610MB-L 产品品牌| 研华 产品产地| 台湾 产品简介| 4U 15槽上架式机箱,支持前部可访问风扇 5 产品名称| IPC-610-F 产品品牌| 研华 产品产地| 台湾 产品简介| 带ATX 主板选项的4U 高14 槽机架安装机箱 6 产品名称| IPC-619 产品品牌| 研华 产品产地| 台湾 产品简介| 用于母板/全长/半长卡/单板电脑的紧凑型4U上架式机箱 7产品名称| ACP-4360 产品品牌| 研华 产品产地| 台湾 产品简介| 4U上架式机箱,支持6个热插拔RAID SA TA硬盘 徐州宏茂机电设备有限公司
二.你好,现向您介绍的是研华IPC-610工控机的一些系列和参数配置,以下配置仅做为参考研华IPC-610工控机 主要特点 4U高支持14槽背板/A TX母板 前端可安装3个驱动器/1个软驱 前置USB/PS2接口 能抗冲击,振荡,并且能在高温下稳定工作 可支持冗余电源 尺寸482x177x480 mm(宽x高x深) 以上工控机可按客户要求进行配置 1 IPC-610/PCA-6006LV工业主板/P42.8G/1G/160G/DVD/百兆网卡/显卡/2USB/键盘鼠标 2 IPC-610/PCA-6006LV工业主板/P43.0G/1G/160G/DVD/百兆网卡/显卡/2USB/键盘鼠标 3 IPC-610/PCA-6010VG工业主板/双核1.8G/1G/160G/DVD/千兆网卡/显卡/6USB/键盘鼠标 4 IPC-610/PCA-6010VG工业主板/双核2.0G/1G/160G/DVD/千兆网卡/显卡/6USB/键盘鼠标 5 IPC-610/PCA-6010VG工业主板/双核2.4G/1G/160G/DVD/千兆网卡/显卡/6USB/键盘鼠标 6 IPC-610/PCA-6010VG工业主板/双核2.6G/1G/160G/DVD/千兆网卡/显卡/6USB/键盘鼠标 7 IPC-610MB/AIMB-763VG工业母板/双核1.8G/1G/160G/DVD/千兆网卡/显卡/声卡/6USB/键盘鼠标 8 IPC-610MB/AIMB-763VG工业母板/双核2.0G/1G/160G/DVD/千兆网卡/显卡/声卡/6USB/键盘鼠标 9 IPC-610MB/AIMB-763VG工业母板/双核2.4G/1G/160G/DVD/千兆网卡/显卡/声卡/6USB/键盘鼠标 10 IPC-610MB/AIMB-763VG工业母板/双核2.6G/1G/160G/DVD/千兆网卡/显卡/声卡/6USB/键盘鼠标 11. IPC-610MB-25LCE/562VG/E5300/2G/250G/DVD/KB/MS/一年 12. IPC-610P4R-30H/6010VG/E7400/2G/320G/DVD/KB/MS/一年 13. IPC-610/763VG/E5300/1G/250G/DVD/KB/MS/一年 徐州宏茂机电设备有限公司
基于板卡的两轴运动控制系统
基于板卡的两轴运动控制系统 1.概述 两轴运动控制系统在许多自动化设备中都有应用,如X-Y台控制,医疗器械(如X光机)等。常用的上位控制单元有自开发单片机系统、具有运动控制功能的专用PLC(如松下FP0)等。本文介绍一种更具开放性、控制更灵活的上位控制单元——运动控制卡。 两轴运动控制系统的执行电机多采用步进电机或全数字式伺服电机。MPC01运动控制卡是步进机电公司开发的基于PC机ISA总线的步进或数字式伺服电机的上位控制单元。它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等工作;MPC01卡完成运动控制的细节(包括脉冲和方向信号的输出、自动升降速处理、原点和限位等信号的检测等)。 下图为一个简单的两轴运动控制系统控制电路接线图: 2.两轴运动系统的基本运动型式及实现方法 1.独立运动 所谓独立运动指各轴的运动之间没有联动关系,可以是单轴运动,也可以是两轴同时按各自的速度运动。点位运动、连续运动都属于独立运动。 (1)点位运动函数 点位运动是指被控轴以各自的速度分别移动指定的距离,在到达目标位置时自动停止。在MPC01函数库中共提供了六个点位运动指令函数: int con_pmove(int ch,long step);/*一个轴以常速做点位运动*/ int fast_pmove(int ch,long step);/*一个轴以快速做点位运动*/ int con_pmove2(int ch1,long step1,int ch2,long step2);/*两轴以常速做点位运动*/ int fast_pmove2(int ch1,long step1,int ch2,long step2);/*两轴以快速做点位运动*/ (2)连续运动函数 连续运动是指被控轴以各自的速度按给定的方向一直运动,直到碰到限位开关或调用制动函数才会停止。在MPC01函数库中共提供了六个连续运动指令函数: int con_vmove(int ch,int dir);/*一轴以常速做连续运动*/ int fast_vmove(int ch,int dir);/*一轴以快速连续运动*/ int con_vmove2(int ch1,int dir1,int ch2,int dir2);/*两轴以常速连续运动*/ int fast_vmove2(int ch1,int dir1,int ch2,int dir2);/*两轴以快速连续运动*/ (3)回原点函数 回原点运动是指被控轴以各自的速度按给定的方向一直运动,直到碰到原点信号限位开关或调用制动函数才会停止。在MPC01函数库中共提供了六个回原点运动指令函数: int con_hmove(int ch,int dir);/*以常速返回原点*/ int fast_hmove(int ch,int dir);/*以快速返回原点*/ int con_hmove2(int ch1,int dir1,int ch2,int dir2);/*两轴以常速各自返回原点*/ int fast_hmove2(int ch1,int dir1,int ch2,int dir2);/*两轴以快速各自返回原点*/ 2.插补运动 插补运动是指两轴按照一定的算法进行联动,被控轴同时启动,并同时到达目标位置。插补运动以矢量速度运行,矢量速度分为常矢量速度和梯形矢量速度。与插补运动有关的函数有: (1)线性插补函数
- AGV控制板卡的设计
- 组态控制技术实训教程(MCGS)课件监控篇08 实训16 PC与PCI数据采集卡通信控制
- PCI1010运动控制卡使用说明书
- PCI运动控制卡快速入门手册
- 凌华数据采集卡产品选型指导书与应用案例
- 计算机控制技术项目16 实训16 数据采集卡开关控制
- 电动平移台控制器使用说明
- USBCNC四轴控制板使用手册
- 凌华科技发表高端四轴运动控制卡PCI
- 运动控制卡简介
- 凌华控制板卡使用方法专题培训课件
- 凌华工业主板常见问题分析处理
- 凌华数据采集卡产品选型指导书与应用案例PPT(49张)
- 凌华AMP208C控制板卡调试说明书
- JUKI-2060各控制板卡的作用
- 凌华数据采集卡产品选型指南暨应用案例
- 钢化炉简易操作使用说明
- APM-204C_208C MCPRO2使用手册
- 《基于PC运动控制板卡的交流伺服控制系统》经典培训课件
- 控制板卡