武汉大学摄影测量学期末试卷

摄影测量学期中考试试卷
摄影测量学期中考试试 卷 -CAL-FENGHAI.-(YICAI)-Company One1
云南师范大学2015—2016学年第二学期期中考试 摄影测量学试卷 学院_______ 专业______ 年级______ 学号______ 姓名________ 考试方式: (闭卷)考试时量:120分钟 一、填空题(每空1分,共20分) 1、摄影测量三个发展阶段是,,, 2、摄影测量常用坐标系有,,, ,。 3、恢复立体像对左右像片的相互位置关系的依据是方程。 4、两个空间直角坐标系间的坐标变换至少需要和控制点。 5、摄影测量加密按数学模型可分为:,,三种方法。 6、特征匹配的三个步骤:,,。 7、DEM的表示方式:,,。
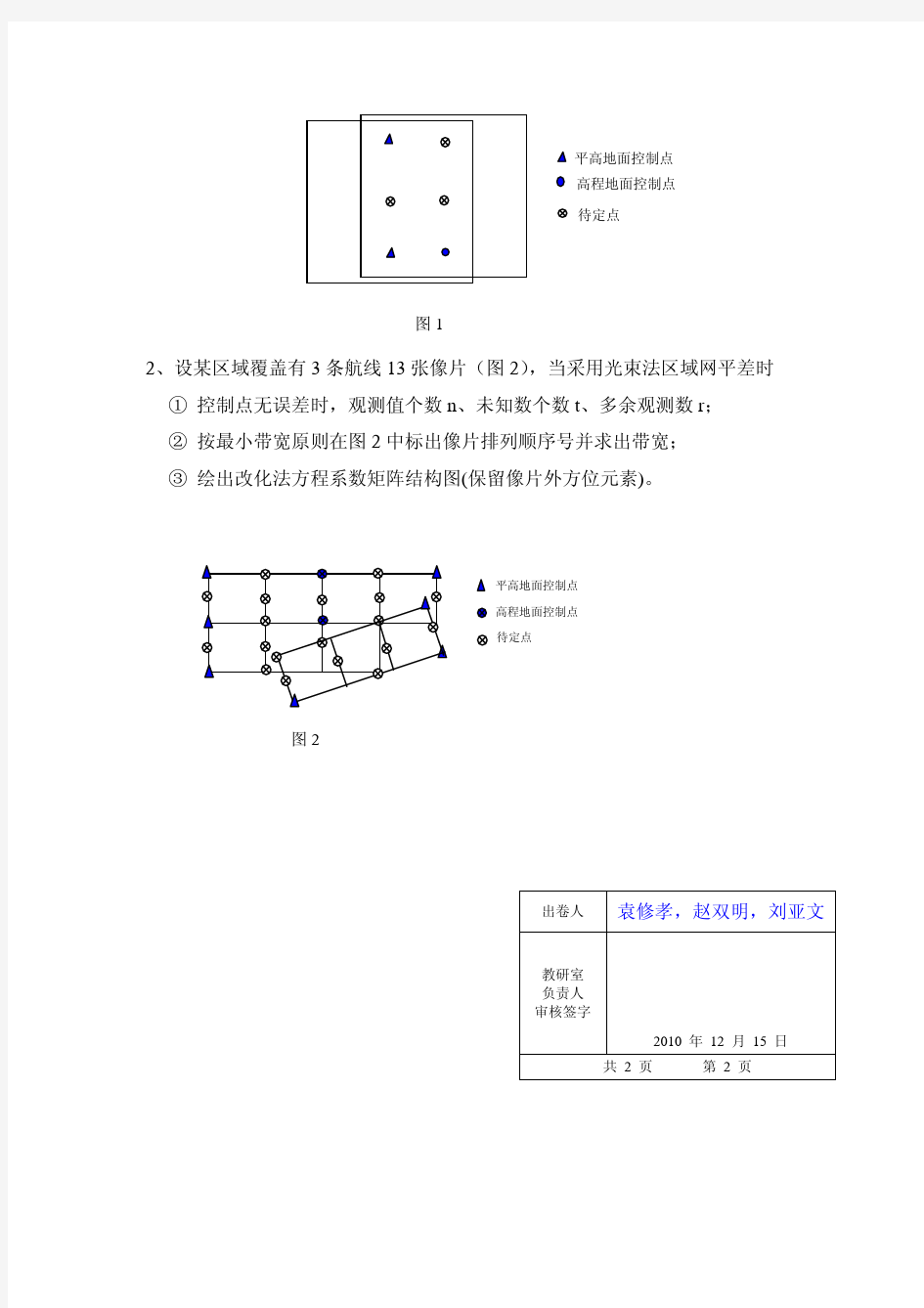
二、计算题(每小题10分,共20分) 1、已知某航测项目参数设计为:航摄区域km km 54?,航摄仪:Leica RC30,胶片规格:cm cm 2323?,mm f 4.152=,摄影比例尺为:5000:1,航向重叠度P %=61%,旁向重叠度为:q %=32%,求行高H 是多少,摄影基线长是多少? 2、 3、如右图,已知规则矩形格网四个顶点坐标: A (627.00,570.00,126.00)、 B (627.00,580.00,125.00) C (637.00,570.00,130.00)、 D (637.00,580.00,128.00) 求点P (637.80,576.40)的高程值。 Y
三、简答题(10分+15分+15分+20分,共60分) 1、什么是影像的内外方位元素,主要参数分别有哪些? 2、单幅影像空间后方交会与立体像对前方交会定义是什么,为什么单张像片不能求解物体空间位置而立体像对可解三维坐标? 3、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简述其在摄影测量中的主要用途。
摄影测量学基础试题
一、名词解释 1摄影测量学 2航向重叠 3单像空间后方交会 4相对航高 5解析空中三角测量 6外方位元素 7核面 8绝对定向元素 二、问答题 1.写出中心投影的共线方程式并说明式中各参数的含义。 2.指出采用“后方交会+前方交会”和“相对定向+绝对定向”两种方法计算地面点坐标的基本步骤。 3.简述利用光束法(一步定向法)求解物点坐标的基本思想。 4.简述解析绝对定向的基本过程。 5.简述相对定向的基本过程。
6.试述航带网法解析空中三角测量的基本步骤。 二、填空 1摄影测量的基本问题,就是将_________转换为__________。 2人眼产生天然立体视觉的原因是由于_________的存在。 3相对定向完成的标志是__________。 三、简答题 1两种常用的相对定向元素系统的特点及相对定向元素。 2倾斜位移的特性。 3单航带法相对定向后,为何要进行比例尺归化?怎样进行? 4独立模型法区域网平差基本思想。 5何谓正形变换?有何特点? 四、论述题 1空间后方交会的计算步骤。 2有三条航线,每条航线六张像片组成一个区域,
采用光束法区域网平差。 (1)写出整体平差的误差方程式的一般式。(2)将像片进行合理编号,并计算带宽,内存容量。 (3)请画出改化法方程系数阵结构简图。 参考答案: 一、 1是对研究的对象进行摄影,根据所获得的构想信 息,从几何方面和物理方面加以 分析研究,从而对所摄影的对象 本质提供各种资料的一门学科。2供测图用的航测相片沿飞行方向上相邻像片的重叠。 3知道像片的内方位元素,以及三个地面点坐标和量测出的相应像点的坐标,就可以根据共线方程求出六个外方位元素的方法。
数字摄影测量复习题含答案
第五章数字影像与特征提取 1.什么是数字影像?其频域表达有什么作用? 答:①数字影像是以数字形式保存数字化航空、胶片影像的扫描影像 ②频域表达对数字影像处理是很重要的。因为变换后矩阵中元素的数目与原像中的相同。但其中很多是零值或数值很小,这就意味着通过变换、数据可以被压缩,使其能更有效的存储和传递;其次是影像分解力的分析以及许多影像处理过程。例如滤波、卷积以及在有些情况下的相关运算,在频域内可以更为有利的进行。其中所利用的一条重要关系就是在空间域内的一个卷积,相当于在频率域内其卷积函数的相乘,反之亦然。在摄影测量中所使用的影像的傅立叶谱可以有很大的变化,例如在任何一张航摄影像上总可以找到有些地方只含有很低的频率信息,而有些地方则主要包含高频信息,偶然的有些地区主要是有一个狭窄范围的带频率信息。 2.怎样根据已知的数字影像离散灰度值,精确计算其任意一点上的灰度值? 答::当欲知不位于矩阵(采样)点上的原始函数g(x,y)的数值时就需要内插,此时称为重采样 3.常用的影像重采样方法有哪些?试比较他们的优缺点 答:①常用的影像重采样方法有最邻近像元法、双线性插值、双三次卷积法 ②最邻近像元法最简单、计算速度快、且能不破坏原始影像的灰度信息,但几何精度较差; 双线性插值法虽破坏原始影像的灰度信息,但精度较高,较为适宜; 双三次卷积法其重采样中误差约为双线性插值的1/3,但较费时; 4.已知gi,j=102,gi+1,J=112,gi+1,j+1=126,k-i = /4,l -j= ,为采 样间隔,用双线性插值计算gk,l 答:g(k,l)=W(i,j) g(i,j)+W(i+1,j) g(i+1,j)+W(i,j+1) g(i,j+1)+W(i+1,j+1) =(1- )(1- )*102+(1 - /4)/4*112+ /41- /4)
摄影测量学考试知识点汇编
摄影测量学习题 一、名词解释: 1、摄影测量学:是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方 面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。 2、光圈号数 :相对孔径的倒数 3、景深 :远景与近景之间的纵深距离称为景深 4、超焦点距离:当物镜向无限远物体对光时,不仅远处的物体构象清晰,而且在离开物镜 不小于某一距离H 的所有物体,其构象都很清晰,这个距离H 就称为超焦点距离或称为无限远起点 5、视场: 将物镜对光于无穷远,在焦面上会看到一个照度不均匀的明亮圆。这个直径为 ab 的明亮圆的范围称为视场 6、视场角 :物镜的像方主点与视场直径所张的角2α。 7、像场 :在视场面积内能获得清晰影像的区域 8、像场角; 物镜的像方主点与像场直径所张的角2β。 像主点:摄影机轴在框标平面上的垂足。 11、航向重叠 :沿飞行方向上相邻像片所摄地面的重叠区。 12、旁向重叠:两相邻航带摄区之间的重叠 主光轴 :通过诸透镜光轴的轴 主点: 主平面与光轴的交点 13、摄影基线 :相邻像片摄影站(投影中心)之间的空间连线。 15、内方位元素 确定物镜后节点和像片面相对位置的数据。 16、外方位元素 确定摄影摄影机或像片的空间位置和姿态的参数 焦点 平行光轴的投射光线经物镜后产生折射,该折射线与光轴的交点。 17、像片倾角 航摄仪光轴与通过物镜中心的铅垂线所夹的角称为像片的倾斜角 19、像片旋角 相邻像片的主点连线与像幅沿航线方向两框标连线之间的夹角称为像片的旋 偏角 20、倾斜误差 因像片倾斜引起的像点位移 节点 投射光线与成像光线与光轴的交角u 和u ′相等时,投射光线与成像光线与光轴的交点。 21、投影差 因地形起伏引起的像点位移 22、摄影比例尺 航摄相片上某一线段构成的长度与地面上相应水平距离之比。 23、像片控制点 为联系地面与相片而测定地面坐标的像点。 相对孔径 物镜焦距与有效孔径之比 25、左右视差 同名像点在各自像平面坐标系中的x 坐标之差 26、上下视差 同名像点在各自像平面坐标系中的Y 坐标之差 27、核点 基线延长线与左、右像片的交点k 1、k 2称为核点 28、核线 核面与像片的交线称为核线 29、核面 通过摄影基线S 1S 2与任一地面点A 所作的平面W A 30、投影基线 两摄站的连线 31、像片基线 指相邻两张像片主点的连线 32、解析空中三角测量 即在一条航带几十条像对覆盖的区域或由几条航带几百哥像对构成 的区域内,仅仅由外业实测几个少量的控制点,按一定的数学模型,平差 解算出摄影测量作业过程中所需的全部控制点及每张像片的外方位元素 33、空间后方交会 就是利用地面控制点的已知坐标值反求像片外方位元素 ()()()()(){} 2332233213322232332 1[]Z X Y X Y Y Y X X X Z Y X X Y Z X Y Y X Z X Y X Y =-+-+-+-+--
数字摄影测量复习题含答案
第五章数字影像与特征提取 1.什么就是数字影像?其频域表达有什么作用? 答:①数字影像就是以数字形式保存数字化航空、胶片影像得扫描影像 ②频域表达对数字影像处理就是很重要得。因为变换后矩阵中元素得数目与原像中得相同。但其中很多就是零值或数值很小,这就意味着通过变换、数据可以被压缩,使其能更有效得存储与传递;其次就是影像分解力得分析以及许多影像处理过程。例如滤波、卷积以及在有些情况下得相关运算,在频域内可以更为有利得进行。其中所利用得一条重要关系就就是在空间域内得一个卷积,相当于在频率域内其卷积函数得相乘,反之亦然。在摄影测量中所使用得影像得傅立叶谱可以有很大得变化,例如在任何一张航摄影像上总可以找到有些地方只含有很低得频率信息,而有些地方则主要包含高频信息,偶然得有些地区主要就是有一个狭窄范围得带频率信息。 2.怎样根据已知得数字影像离散灰度值,精确计算其任意一点上得灰度值? 答::当欲知不位于矩阵(采样)点上得原始函数g(x,y)得数值时就需要内插,此时称为重采样 3.常用得影像重采样方法有哪些?试比较她们得优缺点 答:①常用得影像重采样方法有最邻近像元法、双线性插值、双三次卷积法 ②最邻近像元法最简单、计算速度快、且能不破坏原始影像得灰度信息,但几何精度较差; 双线性插值法虽破坏原始影像得灰度信息,但精度较高,较为适宜; 双三次卷积法其重采样中误差约为双线性插值得1/3,但较费时;
4、已知/为采样 间隔,用双线性插值计算gk,l 答:g(k,l)=W(i,j) g(i,j)+W(i+1,j) g(i+1,j)+W(i,j+1) g(i,j+1)+W(i+1,j+1) //4)*102+(1 - 4) //4(1- /4)*118+( /4)* ( /4)*126 =102+13/-1 5、什么就是线特征?有哪些梯度算子可用于线特征得提取? 答:①线特征指影像得边缘与线,边缘可定义影响局部区域特征不相同得那些区域间得分界线,而线则可以认为就是具有很小宽度得其中间区域具有相同影响特征得边缘对 ②常用方法有差分算子、拉普拉斯算子、LOG算子等 第六章影像匹配基础理论与算法 1. 什么就是金字塔影像?基于金字塔影像进行相关有什么好处?为什么? 答:①对于二维影像逐次进行低通滤波,并增大采样间隔,得到一个像元素总数逐渐变小得影像序列,依次在这些影像对中相关,即对影像得分频道相关。将这些影像叠置起来颇像一座金字塔,因而成为金字塔影像结构 ②好处:提高了影响得可靠性与准确性,速度增快,先用低通滤波进行初相关,找到了同名点得粗略位置,然后利用高频信息进行精确相关,实现从粗到细得处理过程 ③因为通过相关函数得谱分析可知,当信号中高频成分较少时,相关函数曲线较平缓;但相关得拉入范围较大;反之,当高频成分较多时,相关函数曲线较陡,相关精度较高,但相关拉入范围较少;此外,当信号中存在高频窄带随机噪声或信号中存在较强得高频信号时,相关
武大《高等数学》期末考试试题
2000~2001学年第二学期《 高等数学 》期末考试试题(180学时) 专业班级 学号_______________ 姓名 一、 已知一个二阶常系数线性齐次微分方程有相等的实根a ,试写出此微分方程及通解。 (8分) 二、 设幂级数∑∞=?0 )1(n n n x a 在x =3处发散,在x =1处收敛,试求出此幂级数的收敛半径。(8分) 三、 求曲面323 =+xz y x 在点(1,1,1)处的切平面方程和法线方程 。(10分) 四、 设)(,0x f x >为连续可微函数,且2)1(=f ,对0>x 的任一闭曲线L,有0)(43=+∫L dy x xf ydx x ,求)(x f 。 (10分) 五、 设曲线L (起点为A ,终点为B )在极坐标下的方程为36(,2sin πθπθ≤≤= r ,其中θ=6π 对应起点A ,3 π θ=对应终点B ,试计算∫+?L xdy ydx 。(10分) 六、 设空间闭区域Ω由曲面222y x a z ??=与平面0=z 围成,其中0>a ,Σ为Ω的 表面外侧,且假定Ω的体积V 已知,计算: ∫∫Σ=+?.)1(2222dxdy xyz z dzdx z xy dydz yz x 。(10分) 七、 函数),(y x z z =由0),(=z y y x F 所确定,F 具有连续的一阶偏导数,求dz 。 (12分) 八、 计算∫∫∫Ω +,)(22dxdydz y x 其中Ω是由平面z =2与曲面2222z y x =+所围成的闭区域。(12分) 九、 已知级数 ∑∞=1n n U 的部分和arctgn S n =,试写出该级数,并求其和,且判断级数∑∞=1n n tgU 的敛散性。(12分) 十、 设)(x f 连续,证明∫∫∫??=?A A D dt t A t f dxdy y x f |)|)(()(,其中A 为正常数。D :2||,2||A y A x ≤≤ 。(8分)
最新摄影测量学试题(含答案)
摄影测量学 一、名词解释(每小题3分,共30分) 1摄影测量学2航向重叠 3单像空间后方交会4相对行高 5像片纠正6解析空中三角测量 7透视平面旋转定律8外方位元素 9核面10绝对定向元素 二、填空题(每空1分,共10分) 1摄影测量的基本问题,就是将_________转换为__________。 2物体的色是随着__________的光谱成分和物体对光谱成分固有不变的________、__________、和__________的能力而定的。 3人眼产生天然立体视觉的原因是由于_________的存在。 4相对定向完成的标志是__________。 5光束法区域网平差时,若像片按垂直于航带方向编号,则改化法方程系数阵带宽为_______,若按平行于航带方向编号,则带宽为_________。 三、不定项选择题(每小题2分,总计20分) 1、以下说法正确的是()。 同名像点必定在同名核线上 B.像点、物点、投影中心必在一条直线上 C.主合点为主纵线与核线的交点D.等角点在等比线上 2、以下为正射投影的为()。 A.框幅式相机拍摄的航片 B.地形图 C.用立体模型测绘的矢量图 D.数字高程模型 3、立体像对的前方交会原理能用于()。 A.相对定向元素的解求 B.求解像点的方向偏差 C.地面点坐标的解求 D.模型点在像空间辅助坐标系中坐标的解求 4、解析内定向的作用是()。 A.恢复像片的内方位元素 B.恢复像片的外方位角元素 C.部分消除像片的畸变 D. 恢复像片的外方位线元素 5、光学纠正仪是()时代的产品,其投影方式属于机械投影。 A.模拟摄影测量 B.解析摄影测量 C.数字摄影测量 D.数字投影 6、卫星与太阳同步轨道是指()。 A、卫星运行周期等于地球的公转周期 B、卫星运行周期等于地球的自传周期 C、卫星轨道面朝太阳的角度保持不变。 D、卫星轨道面朝太阳的角度不断变化。 7、以下()不是遥感技术系统的组分。
摄影测量学考试题
1、地面摄影测量坐标系:x 轴沿着航线方向,z 轴沿铅垂线方向,y 轴符合右手定则。 2、4D 产品:DEM :数字高程模型 DLG :数字线划地图(矢量图) DRG :数字栅格地图(栅格图)DOM :数字正射影像图 3、摄影测量分类:①按距离远近分:航天、航空、地面、近景、显微;②按用途:地形、非地形;③按处理手段:模拟,解析,数字 4、摄影测量特点:①无需接触物体本身获得被摄物体信息②由二维影像重建三维目标③面采集数据方式④同时提取物体的几何与物理特性 5、航向重叠度:同一航线上,相邻两像片应有一定范围的影像重叠 6、摄影基线:航向相邻两个摄影站间的距离 7、摄影比例尺:摄影像片水平,地面取平均高程,像片上的线段l 与地面上相应的水平距L 之比 8、航片与地形图的区别:①比例尺:地图有统一比例尺,航片无统一比例尺;②表示方式:地图为线划图,航片为影像图;③表示内容:都地图需要综合取舍;④几何差异:航摄像片可组成像对立体观察 9、航摄像片中的重要点线面:点:S (摄影中心)o (像主点)O (地主点)n (像底点)N (地底点)c (等角点)C (地面等角点)i (主合点)j (主遁点);线:TT (迹线)SoO (主光线)SnN (主垂线)VV (摄影方向线)vv (主纵线)ScC (等角线)hihi (主合线)hoho (主横线)hchc (等比线);面:E (地面)P (像片面)W (主垂面)Es (真水平面) 10、摄影测量5个常用坐标系:①像平面直角坐标系②像空间直角坐标系③地面测量坐标系④像空间辅助坐标系⑤地面摄影测量坐标系 11、像片内方位元素:确定摄影物镜后节点与像片之间相互位置关系的参数(内方位元素(f y x 00,,)可恢复摄影光束) 12、像片外方位元素:确定摄影瞬间像片在地面直角坐标系中空间位置和姿态的参数 13、外方位线元素:描述摄影中心在地面空间直角坐标系中的位置 14、外方位角元素:描述像片在摄影瞬间的空间姿态 15、像片外方位角元素:?? ???(方位角)(像片旋角)(像片倾角)转角系统。轴为主轴以航向倾角)(像片旋角)(旁向倾角)转角系统。轴为主轴以(旁向倾角)(像片旋角)航向倾角)转角系统。轴为主轴以A Z X Y v v k k ~~A (''k 'w 'k ~'~w'w k (k ~w ~αα????
武汉大学管理学期末试卷(包括参考答案)
经济与管理学院 Economics and Management School of Wuhan University 2008级工商管理专业本科《管理学》期末考试试题(A卷参考答案) 一、名词解释(共4小题,每题4分,共16分) 1、管理:社会组织中,为了实现预期的目标,以人为中心进行的协调活动。 2、激励:激发人的行为动机的心理过程。 3、计划:对未来行动的安排。它包括明确组织的目标、考核的指标,实现目标的手段选择、战略制定以及进度安排 等。 4、控制:监视各项活动以保证它们按计划进行,并纠正各种偏差的过程。 二、判断题(共6小题,每题3分,共18分。判断正确1分,对自己判断进行正确的解释2分。注意:不管判断是否, 都必须对自己判断的结论进行解释。) 1、由于西蒙认为,决策的标准是满意,因此,在决策工作中就不存在决策的优劣与好坏之分了。 错!决策的满意是西蒙教授根据决策主客观条件的有限性所作出的结论,但这并不意味着,人们在决策中就没有优劣和好坏的标准。 2、在控制环节中,由于前馈控制可以对工作中可能出现的偏差进行预测和估计,因此能够有效地防范工作中可能出 现的各类问题,而被管理人员认为是最为有效的控制方法。 错!前馈控制由于以对工作中可能出现的偏差进行预测和估计,因此能够有效地防范工作中可能出现的各类问题,具有控制的有效性,但任何事情的在运行过程中可能出现的情况并不能完全在事先作出预测与判断,所以三种控制方法都有其独自的有效性,互相补充才能正真实现有效的控制。 3、美国心理学家库尔特?勒温把人的行为描述为:B=f(P?E)这样的函数式。这表明:人的行为往往是其个性特点和经 济目标追求的函数。 错!勒温所描述的的函数式中,E是指environment,环境,而不是economic。 4、管理工作需要解决的主要问题是:管理好组织的成员,使其听从和服从管理人员的指挥。 错!管理好组织的成员不错,但仅为“听从”和“服从”是不对的,这违背了管理的基本原则:双方共同的思想革命。 5、计划工作的目的就是使组织的发展能更好地适应环境的变化。 对!计划是为了更好的适应变化是计划制定的主要原则和思想。 6、由日籍美国人威廉?大内提出的“Z理论”是对人们人性的一种假设的理论。 错!大内提出的“Z理论”,是针对美国企业管理模式(A)与日本管理模式(J)的一种相互结合的模式。 三、简答题:(共4小题,每题6分,共24分) 1、泰罗往往被称为“科学管理之父”。试分析,泰罗科学管理思想的精髓是什么? 答:该题可以在两个答案中选择一个作答:1、管理人员与被管理者双方在盈余管理上共同的思想革命;用科学管理代替经验管理!2、泰罗的四项管理原则:对个人的每个动作进行科学研究,取代老的单凭经验的办法;科学地挑选工人,
摄影测量学考试复习
产品是指 、、、。 摄影测量学:是利用光学摄影机摄取照片,通过像片来研究和确定被摄物体的形状大小位置和相互关系的一门科学技术 摄影测量按远近分为航天摄影测量、航空摄影测量,地面摄影测量,近景摄影测量,显微镜摄影测量。 摄影测量按用途可分为地形摄影测量、非地形摄影测量。 摄影测量学的发展经过了模拟摄影测量、解析摄影测量、数字摄影测量三个阶段。 .由于立体像对选取的像空间辅助坐标系的不同分为连续像对与单独像对 摄影机的主距:航空摄影物镜中心至底片面的距离是固定值 .摄影比例尺:严格讲,摄影比例尺是指航摄像片上一线段为与地向上相应线段的水干距之比。摄影像片的影像比例尺处处均不相等 .摄影航高:摄影机的物镜中心至该面的距离 .绝对航高 :摄影物镜相对于平均海平面的航高,指摄影物镜在摄影瞬间的真实海拔高度。 .相对航高:摄影物镜相对于某一基准面或某一点的高度 .制定航摄计划: .确定摄区范围;.选择航摄仪;.确定航摄仪的比例尺;,确定摄影航高;,需要像片数,日期等。 .摄影基线:航线方向相邻两摄站点间的空间距离称为摄影基线。 .摄影资料的基本要求:.影像的色调,.像片的重叠,.像片倾角,.航线弯曲,,像片旋角 .像片倾角:空中摄影采用竖直摄影方式,即摄影瞬间摄影机的主光轴近似与地面垂直,它偏离铅垂线的夹角应小于,夹角称为像片倾角。 .航向重叠:同一条航线内相邻像片之间的影像重叠称为航向重叠,一般要求在%以上。目的:保证像片立体量测与拼接 .旁向重叠:相邻航线的重叠称为旁向重叠,重叠度要求在%以上 .中心投影:投影光线会聚与一点 .像主点:摄影机主光轴在框标平面上的垂足 .像底点:主垂线与像片面的交点 .摄影测量常用的坐标系统有哪些? 像平面坐标系;像空间坐标系;像空间辅助坐标系;摄影测量坐标系;地面测量坐标系 .对于一张航摄像片其内外方位元素为内外方位元素均为常数, .内方位元素:内方位元素是表示摄影中心与像片之间相关位置的参数,包括三个参数。即摄影中心到像片的垂距(主距)及像主点o 在像框标坐标系中的坐标00,y x .外方位元素:在恢复内方位元素的基础上,确定摄影光束在摄影瞬间的空间位置与姿态的参数称为外方位元素, 外方位角元素:确定像空间坐标系的三轴在地面坐标系中的方向。 .像点在像空间直角坐标系与像空间辅助坐标系的变换关系: .同名像点:同名光线在左右相片上的构像 .摄影基线:同一航线内相邻两摄站的连线 .核线:核面与像片的交线,核线会聚于核点 .核面:摄影基线与地面点所作平面 .同名像点:地面上一点在相邻两张像片上的构像 123123123u x a a a x v R y b b b y w f c c c f ???????? ???????? ==????????????????--????????
数字摄影测量试卷
一、名词解释: 1 、影像匹配: 【答】 通过一定的匹配算法在两幅或多幅影像之间识别同名点,如二维影像匹配中通过比较目标区和搜索区中相同大小的窗口的相关系数,取搜索区中相关系数最大所对应的 窗口中心点作为同名点; 2、金字塔影像: 【答】对二维影像进行低通滤波,并逐渐增大采样间隔,形成的影像像素数依次减少的影像序列; 3、立体正射影像对: 【答】由正射影像和通过该正射影像生成的立体匹配片两者组成的立体相对; 4、同名核线: 【答】同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确 定的平面; 5、立体透视图: 【答】运用透视原理和一定的数学模型(共线方程)将物方具有三维信息的点转换到指定的平面上,并通过消影处理获得立体透视效果。 二、简答题: 1、以图1所示数字高程模型矩形格网为例,请说明图1中所画等高线的跟踪 过程.如果有特征线存在,应该如何处理? 2、地形特征线的处理: 地形特征线是表示地貌形态、特征的重要结构线,在等高线绘制过程中必须考虑地形特征线以正确表示地貌形态,在跟踪等高线时应注意:(1)、若在某一条格网边上由地形特征线穿过,必须特征线与格网线的交点与相应的格网点内插等高线点,而不能直接用格网点内插等高线; (2)当等高线穿过山脊线(山谷线)时,还必须在山脊线(山谷线)上补插等高线点;(3)当等高线遇到断裂线或边界时,等高线必须断在断裂线或边界线
上; 1、图2是一幅SPOT影像,当影像的外方位元素和DEM已知时,如何制作正 射影像,请说明其原理过程,并指出与框幅式的航空影像制作正射影像算法的相同和不同之处。 对于SPOT影像,当外方位元素和DEM已知识,可采用直接法和间接法结合 的方法制作正射影像: 由于SPOT影像是线阵扫描式影像,每一条影像的外方位元素都不同,在采用正解法或反解法制作正射影像时都存在迭代求解的过程,框幅式航空影像是点投影式影像,整幅影像的外方位元素唯一,制作正射影像采用反解法时无需迭代;另一方面SPOT影像可采用多项式纠正的方法来制作正射影像,而多项式纠正法则不适合于框幅式航空影像制作正射影像; 两者在制作正射影像时都存在通过原始影像内插、重采样来获得每一个地面元所对应的影像坐标及其灰度值,以构成正射影像的过程; 3.“相关系数最大”影像匹配、基于物方的VLL法影像匹配和最小二乘法影像匹配的相同点及差别是什么? “相关系数最大”影像匹配是指在左影像上以目标点为中心选取一定大小的区域作为目标区,将右片同名点可能存在的区域作为搜索区,比较目标窗口和搜索区内同大 小窗口的灰度相关系数,将相关系数最大所对应的窗口的中心作为同名点。 基于物方的VLL法影像匹配是在待定点的地面平面坐标已知的情况下,通过共线方程和合理的高程设定值,解算其相应的像点坐标,通过比较不同高程所对应的像点的相关测度,取最大测度处的像点作为同名点,相应的高程作为物点的高程;最小二乘法影像匹配是指顾及影像的几何和辐射畸变并引入相应的变形蚕参数,同时按最小二乘的原则解求这些参数,将相关系数最大处的左片目标窗口采用坐标梯度加权平均作为目标点,右片同名点的位置由求得的几何参数计算而得;由上可知三种匹配算法的相同点:都是基于灰度的影像匹配,都用到了相关系数最大作为匹配的测度; 不同点:“相关系数最大”影像匹配是基于像方的,通过选定目标区窗口与搜索区中相应大小的窗口中相关系数系数最大的窗口中心点作为同名点,匹配精度与窗口大小、影像信噪比有关; “基于物方的VLL法”影像匹配是基于物方的,而且能直接确定物方点的空间三维坐标,将不同高程处所对应左右影像中的像点作为可能的匹配点,取相关系数最大处作为同名像点,同时也获得了物点的高程信息,匹配精度与步距dz、影像信噪比、匹配窗口大小有关; “最小二乘法”影像匹配是基于像方的,考虑了几何畸变、辐射畸变等系统误差,可灵活引入了各种参数和约束条件,匹配精度较高,可达子像素级,匹配点的位置左片通过窗口梯度加权平均而求得,右片由求得的几何参数计算而得,匹配精度与信噪比、影像的纹理结构有关。 1、什么是特征匹配?它与基于灰度的影像匹配有什么不同?结合课间编程实习内容,请说明实现自动相对定向的方法原理和关键技术 【答】特征匹配是指通过分别提取左右片影像或多张影像的特征(点、线、面等
数字摄影测量试题
《数字摄影测量》考查题 一、名词解释(每词3分,共30分) 1.数字摄影测量:基于数字影像和摄影测量的基本原理,应用计算机技术、 数字影像处理、影像匹配、模式识别等多学科的理论与方法,提取所摄 对像以数字方式表达的几何与物理信息的摄影测量学的分支学科。 2.灰度匹配:指把不同传感器获取的同一地区影像基于灰度的图像匹配算 法进行匹配,以左、右像片上含有相应的图像的目标区和搜索区中的像 元的灰度作为图像匹配的基础。 3.同名像点:同一地理位置目标点在不同像片上的构像点。 4.正射影像纠正:原始遥感影像因成像时受传感器内部状态变化、外部状 态、及地表状况的影响,均有程度不同的畸变和失真;对遥感影像的几 何处理,不仅提取空间信息,也可按正确的几何关系对影像灰度进行重 新采样,形成新的正射影像。 5.金字塔影像结构:对二维影像逐次进行低通滤波,增大采样间隔,得到 一个像元素总数逐渐变小的影像序列,将这些影像叠置起来颇像一座金 字塔,称为金字塔影像结构。 6.灰度量化:把采样点上的灰度数值转换成为某一种等距的灰度级。 7.核线:通过摄影基线与地面所作的平面称为核面,而核面与像面的交线 为核线。 8.数字高程模型:用一组有序数值阵列形式表示地面高程的一种实体地面 模型。 9.影像分割:把影像分割成互不重叠的区域并提取感兴趣目标的技术。 10.特征匹配:利用相关函数评价两幅影像特征点领域的相似性以确定对应 点 二、判断(每小题2分,共10分) 1.航摄像片上任意一点都存在像点位移。(正确) 2.最初的影像匹配是利用相关技术实现的,因此也常称影像匹配为影像相 关。(正确) 3.贝叶斯判别或相关系数为测度的匹配不可避免会发生错误,但其他基本 匹配方法发生错误的概率不比贝叶斯判别更小。(错误) 4.多点最小二乘影像匹配不仅可以基于像方,也可以基于物方。(正确) 5.基于特征匹配是最好的匹配方法。(错误) 三、简答题(每小题8分,共40分) 1.摄影测量学的新发展。 答:1)高分辨率遥感影像—数字影像+RPC;2)数码相机逐步应用于航 空摄影测量;3)POS 自动空三;4)动态GPS配合惯性测量系统 (GPS/IMU);4)激光雷达/激光探测及测距系统(LIDAR)Light Detection And Ranging;5)干涉雷达INSAR 2.数字摄影测量的组成。 答:1)计算机辅助测图:一台计算机工作台,影像获取装置与成果输出
数字摄影测量学要点
数字摄影测量复习要点(2016.5) 1、摄影测量发展历程 模拟摄影测量(1851-1970) 模拟摄影测量主要是根据摄影过程的几何反转,反求地面点的空间位置。它所采用的仪器为光学投影器、机械投影器或光学-机械投影器模拟摄影过程,用光线交会被摄物体的空间位置。 解析摄影测量(1950-1980) 1957年,Helava提出用“数字投影代替”物理投影,数字投影就是利用电子计算机实时的进行共线方程的解算,从而交会出被摄物体的空间位置。 数字摄影测量(1970-现在) 利用数字影像相关技术,实现真正的自动化测图。 数字摄影测量与模拟、解析摄影测量的最大区别: 1)处理的原始信息主要是数字影像; 2)以计算机视觉代替人眼的立体观测。 2、数字摄影测量的任务、特点 主要任务:使用星载(机载)传感器所获取的可见光影像对地球陆地区域进行信息提取,具体包括:目标量测、影像解译、地形图测绘、正射影像图制作、数字高程模型生成。 特点:数据量大、计算机运算速度快、技术精度高。 3、数字摄影测量 定义:数字摄影测量是利用影像相关技术来代替人眼的目视观测,自动识别同名点,实现几何信息的自动提取。 主要内容:影像及特征点的识别、同名像点的自动相关和匹配、数字影像纠正技术、数字高程模型(DEM)的制作、数字摄影测量系统的完整操作和测绘产品的生产。 4、计算机辅助测图 计算机辅助测图(又称数字测图)是利用解析测图仪或具有机助系统的模拟测图仪,进行数据采集和数据处理,测绘数字地图,制作数字高程模型,建立测量数据库。计算机辅助测图系统所处理的依旧是传统像片,且对影像的处理仍然需要人眼的立体量测,计算机则起数据记录与辅助处理的作用,是一种半自动化的方式。计算机辅助测图是摄影测量从解析化向数字化的过渡阶段。
武汉大学研究生英语期末试题 答案及评分 2009级
Keys to Paper A (1---65 题每题一分,客观题共65分) 1-10 B D A C B C C D A B 11-20 A B D A C A D C B D 21-30 B D C A B D C A C B 31-45 D A D A B D C A C B C D C A B 46-55 A D C A B A C C D D 56-65 A C D B D A B C C D Part IV 汉译英(评分给正分,每小题都需打分,精确到0.5分) 1. China is a large country with four-fifths of the population engaged in agriculture, but only one tenth of the land is farmland, the rest being mountains, forests and places for urban and other uses. (2分) 2. An investigation indicates that non-smoking women living in a smoking family environment for 40 years or still longer will have double risk of developing lung cancer. (2分) 3. In our times, anyone who wants to play an important role in a society as he wishes must receive necessary education. With the development of science, more courses are offered in primary schools and middle schools. Compared with the education in the past, modern education places more stress on practicality. (3 分) 英译汉(评分给正分,每小题都需打分,精确到0.5分) 4. 程式化思维是人们交流的绊脚石,因为它有碍于人们对事物的客观观察。客观观察指人 们敏感地搜寻线索,引导自己的想象更接近他人的现实。(2分) 5. 当经济学家最初探讨经济发展的原因时,他们发现:人们一直认为无法解释的剩余因素是人力资本。人力资本,即人口的技能,是造成各国生产力差距以及地位不平等的一个重要因素。(3分) 6. 下文从解决妇女贫困问题的角度出发,探讨两性平等、减轻贫困和环境的可持续性诸目的之间的协同作用,涉及能源短缺、水资源缺乏、健康、气候变化、自然灾害,以及授予妇女在农业、林业、生态多元化管理领域中的权力使之创造可持续的生存方式等问题。(3分) Part V Summary (20分) 评分标准:主要看考生是否了解概要写作的方法以及能否用恰当的语言来表达。概要一定要客观简洁地表达原文的主要内容,不需要评论,不能照抄原文。具体给分标准为:(1)内容和形式都达标,仅有一二处小错:18-19分。(2)内容缺少一到三点,形式错误不过三处:16-17分。(3)内容欠缺较多,形式错误有五六处:14-15分。(4)内容欠缺较多,形式错误有十来处:12-13分。 Science and Humanity The twentieth century has made greater change to the world, which was brought by the progress in science, than any previous century. Unfortunately, not all these changes did good to the human society. Some of them have done serious damage to mankind and have been even predicted to destroy the whole world someday if out of control. In fact, mankind is not biologically programmed for violent behaviors like war. People are faced with a dilemma in which we would like to see science develop freely, but cannot afford the result of that. It is a
摄影测量学部分课后习题答案
第一章 1.摄影测量学:摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术。 1.2摄影测量学的任务:地形测量领域 :各种比例尺的地形图、专题图、特种地图 、正射影像地图、景观图 ;建立各种数据库 ;提供地理信息系统和土地信息系统所需要的基础数据 。非地形测量领域:生物医学、公安侦破、古文物、古建筑、建筑物变形监测 2.摄影测量的三个发展阶段及其特点: 模拟摄影测量阶段:(1)使用的影像资料为硬拷贝像片。(2)利用光学机械模拟装置,实现了复杂的摄影测量解算。(3)得到的是(或说主要是)模拟产品。(4)摄影测量科技的发展可以说基本上是围绕着十分昂贵的立体测图仪进行的。(5)利用几何反转原理,建立缩小模型。(6)最直观,好理解。解析摄影测量阶段:(1)使用的影像资料为硬拷贝像片。(2)使用的是数字投影方式,用精确的数字解算代替了精度较低的模拟解算。(3)得到的是模拟产品和数字产品。(4)引入了半自动化的机助作业, 因此,免除了定向的繁琐过程及测图过程中的许多手工作业方式。 但需要人用手去操纵(或指挥)仪器,同时用眼进行观测。数字摄影测量阶段 :(1)使用的资料是数字化影像、(2)使用的是数字投影方式 。(3)得到的是数字产品、模拟产品。(4)它是自动化操作,加人员做辅助。 3.数字摄影测量与模拟、解析摄影摄影测量的根本区别在于: 1.两者采用的原始原始资料不同,前者是是数字影像,后者是硬拷贝影像。 2.两者的投影方式不同,前者是数字投影,后者是物理投影。 3.两者的操作方式不同,前者是自动化,人员做辅助,后者是其本人人工进行。 第二章 3.摄影测量学的航摄资料有哪些基本要求? 答:1.航影仪应安装在飞机的一定角度,飞行航线一般为东西方向。 2.相邻两像片要有60%左右的重叠度,相邻两航线间要有30%左右的重叠度。 3.航摄机在摄影曝光的瞬间物镜主光轴保持垂直地面。4.像片倾角,倾角不大于2°,最大不超过3°。 5.航线弯曲,一般要求航摄最大偏距△L 于全航线长L 之比不大于3%。 6.像片旋角 ,相邻像片主点连线与像幅沿航线方向两框标连线间的夹角称为像片旋角,以K 表示。一般要求K 角不超过6°,最大不超过8°。 4.计算题对于18cm*18cm ,航向:18*60%= 旁向:18*30%= 对于23cm*23cm, 航向:23*60%= 旁向:23*30%= 8.如何对空中摄影的质量进行评定? 1.检查其航向、旁向重叠度是否达到要求。 2.检查其航向弯曲是否超过3%。 3.检查其像片旋角是否小于等于6°,个别不大于8°。 9.造成像片上影像产生误差的因素有哪些?如何对其影响进行改正? 因素:1.地面地形起伏 2.像片倾斜,产生像片位移。3.航线偏离各张像片的主点连线。 改正: 13. 摄影测量中常用的坐标系有哪些?各有何用?(各坐标系的坐标原点和坐标轴是如何选择的?) 答:摄影测量中常用的坐标系有两大类。一类是用于描述像点的位置,称为像方空间坐标系;另—类是用于描述地面点的位置.称为物方空间坐标系。 (1).像方空间坐标系①像平面坐标系像平面坐标系用以表示像点在像平面上的位置,通常采用右手坐标系,y x ,轴的选择按需要而定.在解析和数字摄影测量中,常根据框标来确定像平面坐标系,称为像框标坐标系。②像空间坐标系,为了便于进行空间坐标的变换,需要建立起描述像点在像空间位置的坐标系,即像空间坐标系。以摄影中心S 为坐标原点,y x ,轴与像平面坐标系的y x ,轴平行,z 轴与主光轴重合,形成像空间右手直角坐标系xyz S -③像空间辅助坐标系,像点的像空间坐标可直接以像平面坐标求得,但这种坐标的待点是每张像片的像空间坐标系不统一,这给计算带来困难。为此,需要建立一种相对统一的坐标系.称为像空间辅助坐标系,用XYZ S -表示。此坐标系的原点仍选在摄影中心S 坐标轴系的选择视需要而定。 (2)物方空间坐标系①摄影测量坐标系 ,将像空间辅助坐标系XYZ S -沿着Z 轴反方向平移至地面点P ,得到的坐标系p p p Z Y X P -称为摄影测量坐标系②地面测量坐标系, 地面测量坐标系通常指地图投影坐标系,也就是国家测图所采用的高斯—克吕格?3带或?6带投影的平面直角坐标系和高程系,两者组成的空间直角坐标系是左手系,用t t t Z Y X T -表示。③地面摄影测量坐标系,由于摄影测量坐
摄影测量学基础试题讲课稿
摄影测量学基础试题
收集于网络,如有侵权请联系管理员删除 中国矿业大学2010~2011学年第1学期 《实用摄影测量学基础》试卷(A )卷 课程编号:07173 考试时间:100分钟 考试方式:闭卷 姓名 _________ 班级 _________ 班级序号 _________ 成绩 ___________ 一、写出中心投影的共线方程式并说明式中各参数的含义。(12分) 二、已知相对定向的误差方程式: v u u q b v N v N q q d b w v d b d N u d N w v w d N w v u v --=--+++--=22112222222 222222)(γμκω?说明误差方程式中各项系数的求解或确定方法并给出其迭代计算流程图。(18分) 三、指出采用“后方交会+前方交会”和“相对定向+绝对定向”两种方法计算地面点坐标的基本步骤。(20分)
四、如下图1,选择3×3窗口进行相关系数匹配时获得了一对同名像点坐标a1(左影像)和a2(右影像),图像坐标为x a1=80,y a1=2190;x a2=83,y a2=1020(单位:pixel)。现用最小二乘影像匹配技术对a1和a2进行匹配优化以获得其子像素级的定位精度。给出如下最小二乘影像匹配获得的变形参数:h0=0.6,h1=0.3,a0=0.4, a1=0.3,a2=0.1,b0=-0.2,b1=0.3, b2=0.2。假设这些参数为初次迭代结果,求出a2初次迭代后经过几何和辐射变形改正后的灰度值(利用双线性插值法);假设这些参数为最终迭代结果,求出a1和a2经最小二乘影像匹配后的坐标(在原图像坐标系下)。(注:a1-x1y1和a2-x2y2为进行最小二乘影像时所选取的局部坐标系)。(20分) 图1 五、试述航带网法解析空中三角测量的基本步骤。(30分) 收集于网络,如有侵权请联系管理员删除
- 武汉大学摄影测量学12
- 武汉大学摄影测量学06
- 武汉大学摄影测量学期末试卷
- 武汉大学数字摄影测量学试卷及答案
- 武汉大学《摄影测量学》复习题库
- 武大版摄影测量学重点
- 武汉大学摄影测量学06
- (武汉大学)摄影测量学教学课件-第六章-第六节-数字地面模型的应用
- 武汉大学摄影测量学14
- 武汉大学测绘学院摄影测量集中实习
- 《摄影测量学》武大精品课程_A摄影测量基础
- 武汉大学数字摄影测量学试卷及答案
- 武汉大学摄影测量学试卷及答案(2005-2011).
- 武汉大学摄影测量学04
- (武汉大学)摄影测量学教学课件-第五章-解析法绝对定向
- 武汉大学摄影测量学试卷及答案(2005-2011)
- 武汉大学摄影测量学01
- 武汉大学数字摄影测量学试卷及答案(2005-2011)
- 武大版摄影测量学重点
- (武汉大学)摄影测量学教学课件-第一章-绪论