G02简易射门机器人
简易射门机器人
【摘要】:本设计以AT89S52单片机作为检测和控制核心的简易射门机器人。通过红外传感器检测黑带信号实现避障、循迹、定位;利用单片机输出PWM脉冲控制直流电机的转向和转速来控制小车;对于金属的检测则采用自制电感线圈;最后利用光敏电阻的趋光特性将小球推进光源所在球门。
【关键词】: 循迹避障测速定位红外传感 PWM
一.系统方案的选择和论证
1、实现方法与结构框图
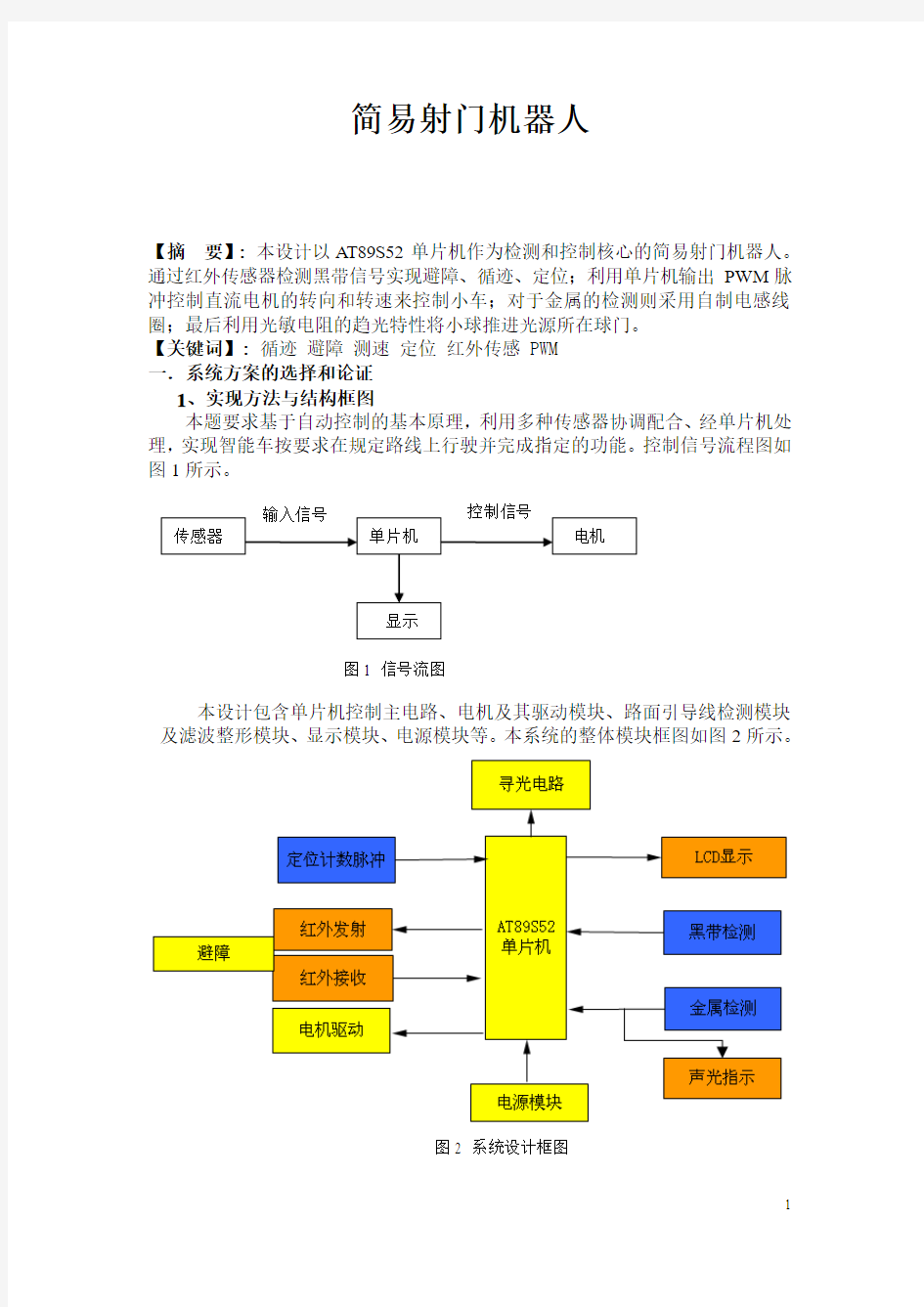
本题要求基于自动控制的基本原理,利用多种传感器协调配合、经单片机处理,实现智能车按要求在规定路线上行驶并完成指定的功能。控制信号流程图如图1所示。
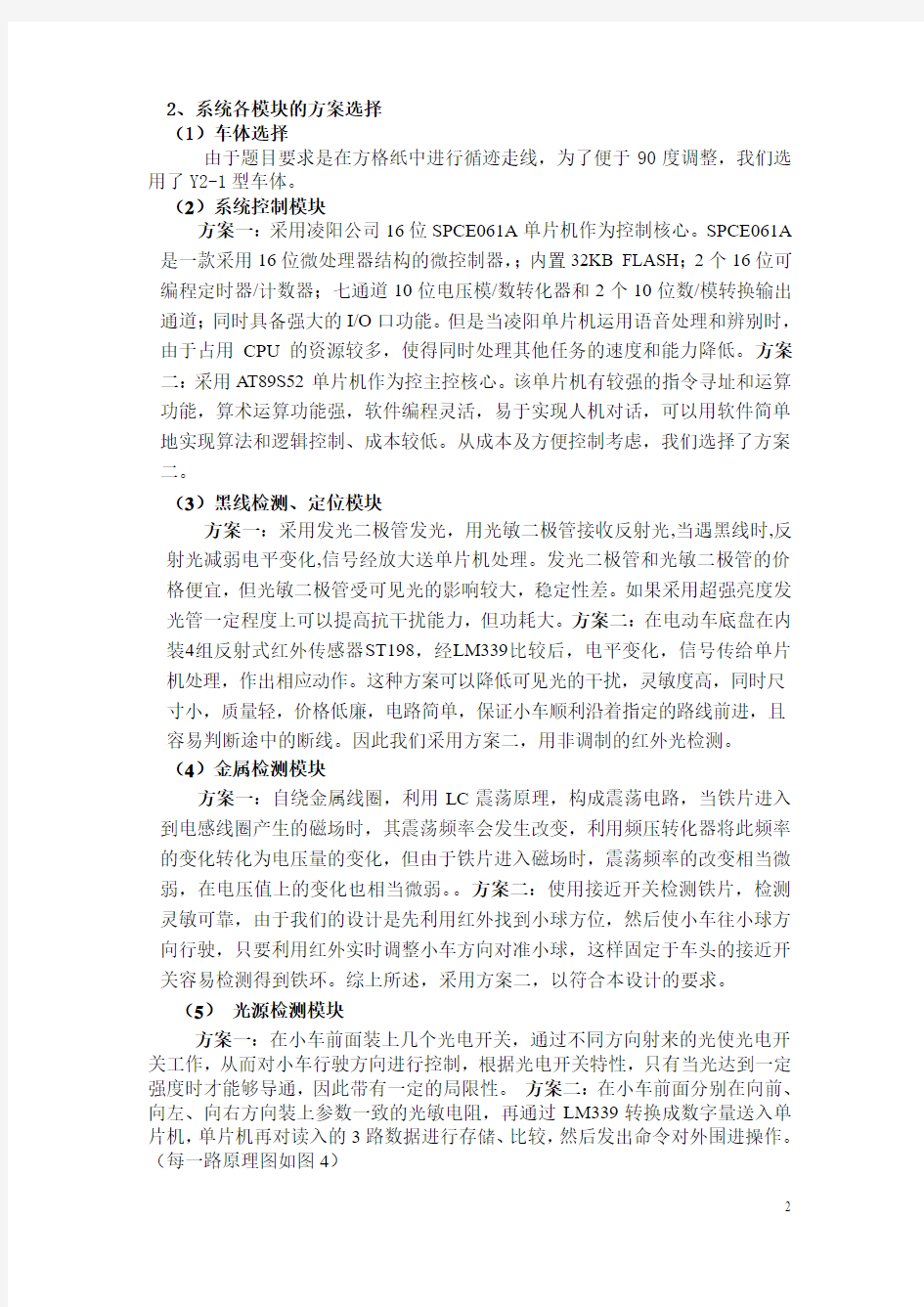
本设计包含单片机控制主电路、电机及其驱动模块、路面引导线检测模块及滤波整形模块、显示模块、电源模块等。本系统的整体模块框图如图2所示。
图2 系统设计框图
2、系统各模块的方案选择
(1)车体选择
由于题目要求是在方格纸中进行循迹走线,为了便于90度调整,我们选用了Y2-1型车体。
(2)系统控制模块
方案一:采用凌阳公司16位SPCE061A单片机作为控制核心。SPCE061A 是一款采用16位微处理器结构的微控制器,;内置32KB FLASH;2个16位可编程定时器/计数器;七通道10位电压模/数转化器和2个10位数/模转换输出通道;同时具备强大的I/O口功能。但是当凌阳单片机运用语音处理和辨别时,由于占用CPU的资源较多,使得同时处理其他任务的速度和能力降低。方案二:采用AT89S52单片机作为控主控核心。该单片机有较强的指令寻址和运算功能,算术运算功能强,软件编程灵活,易于实现人机对话,可以用软件简单地实现算法和逻辑控制、成本较低。从成本及方便控制考虑,我们选择了方案二。
(3)黑线检测、定位模块
方案一:采用发光二极管发光,用光敏二极管接收反射光,当遇黑线时,反射光减弱电平变化,信号经放大送单片机处理。发光二极管和光敏二极管的价格便宜,但光敏二极管受可见光的影响较大,稳定性差。如果采用超强亮度发光管一定程度上可以提高抗干扰能力,但功耗大。方案二:在电动车底盘在内装4组反射式红外传感器ST198,经LM339比较后,电平变化,信号传给单片机处理,作出相应动作。这种方案可以降低可见光的干扰,灵敏度高,同时尺寸小,质量轻,价格低廉,电路简单,保证小车顺利沿着指定的路线前进,且容易判断途中的断线。因此我们采用方案二,用非调制的红外光检测。
(4)金属检测模块
方案一:自绕金属线圈,利用LC震荡原理,构成震荡电路,当铁片进入到电感线圈产生的磁场时,其震荡频率会发生改变,利用频压转化器将此频率的变化转化为电压量的变化,但由于铁片进入磁场时,震荡频率的改变相当微弱,在电压值上的变化也相当微弱。。方案二:使用接近开关检测铁片,检测灵敏可靠,由于我们的设计是先利用红外找到小球方位,然后使小车往小球方向行驶,只要利用红外实时调整小车方向对准小球,这样固定于车头的接近开关容易检测得到铁环。综上所述,采用方案二,以符合本设计的要求。
(5)光源检测模块
方案一:在小车前面装上几个光电开关,通过不同方向射来的光使光电开关工作,从而对小车行驶方向进行控制,根据光电开关特性,只有当光达到一定强度时才能够导通,因此带有一定的局限性。方案二:在小车前面分别在向前、向左、向右方向装上参数一致的光敏电阻,再通过LM339转换成数字量送入单片机,单片机再对读入的3路数据进行存储、比较,然后发出命令对外围进操作。(每一路原理图如图4)
(6)避障模块
方案一:采用超声波避障,用两个超声波传感器,一个用于发射,一个用于接收,超声波传感器的震荡频率为40KHz。一旦有障碍物,超声波会反射回来,超声波接收器接收到信号,经处理后送给单片机,单片机做出相应动作。超声波接收部分的处理芯片用CX20106a 。电路简单,效果好,检测距离远,也因此不适合近距离检测障碍物,但本系统需要检测的障碍物较近,不适合用超声波。方案二:采用一体化红外接收头和NE555来制作检测电路。NE555产生与一体化红外接收头频率一致的矩形脉冲,驱动红外发射管。用一体化红外接收头接收相应频率的信号。此方案电路简单可靠,抗干扰能力强,且只要接收头的工作频率不一样,采用不同的发射频率,就可以实现多路避障同时工作,不互相干扰,通过对多路信号的判断可以提高小车避开障碍物的灵活性。通过以上方案比较,我们选择了方案二。(原理图如图5)
(7)显示模块
方案一:使用传统的数码显示。数码管具有低功耗、低压、对外界环境要求低,操作简单,程序编译容易,但只能显示数字和部分的字母,能显示的信息量小。方案二:使用液晶显示屏(LCD)显示。LCD具有轻薄,短小,低功耗,稳定性好等特点。且画面效果好,面积较大,能显示较多的信息,用1602能显示数字和英文字母,如果是12864,还能显示汉字。由于本系统要显示时间、路程、贴片数等大量信息,用LCD比较合。
综上所述,我们选择1602作为系统的显示模块。
(8)电机驱动模块
方案一:采用步进电机作为该系统的驱动电机。由于其转过的角度可以精确的定位,可以实现小车前进路程和位置的精确定位。虽然采用步进电机有诸多优点,步进电机的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适用于小车等有一定速度要求的系统。经综合比较考虑,我们放弃了此方案。方案二:采用直流减速电机。直流减速电机转动力矩大,体积小,重量轻,装配简单,使用方便。由于其内部有高速电动机提供原始动力,带动变速齿轮组可以产生较大扭力。同时我们采用专用电机驱动芯片L298N,它具有高电压大电流,可以分别控制两个直流电机,而且还带有控制使能端。所以综上考虑,我们选择方案二。
二、系统硬件的具体设计
1.黑线检测模块
设计采用反射取样的形式,当接收管接收到反射光信号产生电平跳变,检测到黑线,输给单片机的是低电平,检测到白色部分是高电平。信号经或非门74LS02后送入单片机I/O口,单片机可以判断哪个光电管检测到黑线然后作出相应的动作。如果黑线刚好漏在两个管之间,那么单片机控制回到前一个状态,
如果没再找到黑线,就进入短线处理程序。加74LS02的目的,是使模拟量转化为开关量,便于处理。因黑线较窄(2cm),为及时调整车的方向。电路在5V电压下工作,根据该传感器红外发射管所需的工作压降(正向管压降为1.25~1.5V)和工作电流(红外发射管的电流为一般在(50mA), 又I=(Vcc-1.5)/R ,由于传感器装在离地面很近的位置,发射功率太大会检测不到黑带,所以发射管的电阻取R1=220。红外接收管负载电阻R2=4.7k,每一路的原理图如图3所示。
图3 黑线检测、定位
2.光源检测模块
设计用3个光敏电阻装在小车的车头顶部位置(前、左、右),每一路的原理图如图4所示,光敏电阻的暗电阻通常很大,阻值往往在兆欧级。而接受光照时的亮电阻要小得多,灵敏度相当高。由于是在白天室内测试的,光敏电阻并不完全是暗电阻,为了减少外界环境的干扰,又尽接收到目的光源的光线,我们给光敏电阻套上黑色圆锥形筒。为了提高在测试环境下的检测灵敏度,与光敏电阻串联的电阻去R1=220(这个值我们是先用变阻器替代R1,经过测试得到220是比较理想的取值),比较器LM339把模拟量变成开关量,通过调节变阻器可以微调灵敏度。
图4 光源检测图5 NE555红外避障3.避障模块
在小车的车头前方装四路红外线发射及接收,每一路的发射和接收电路分别如图5所示。为了防止两路信号互相干扰,由于是四路发射接收电路都用于检测一个方向,所以采用相同频率的四个红外一体化接收头,对应的发射部分NE555产生相应频率的脉冲。在本设计中采用两个接收头的频率为38KHz。红外接收头没接收到信号输出的是高电平,有接收到信号输出的是低电平。在发射电路中
都加了9014三极管,是为了提高电路的带载能力。当然一体化接收头输出的信号经9014会被反向,不过不影响,三级管集电极输出的高低电平直接送单片机处理,单片机做出相应的控制反应。
4.电机驱动
用L298作为电机驱动芯片。L298内部同样包含4通道逻辑驱动电路,可以方便的驱动两个直流电机,或一个两相步进电机,本设计用它驱动两个直流电机。IN1~IN4的信号有单片机给出,IN1、IN2一组,IN3和IN4另一组,分别控制两台直流电机正反转;通过设置不同的占空比可以控制电机的转速,电机驱动采用9v供电。另外,由于电机里面是线圈,当电机转动时,特别是启动和正反转转换瞬间电流变化很大,在out1~out4接8个IN4007二极管是起续流保护作用。三.系统程序设计
为了提高小车反应灵敏度,对红外线接收信号采用中断法来处理;用定时方法对行驶时间计时;黑线检测及铁环检测采用脉冲计数方法处理。
图7 主程序流程图外部中断0服务子程序外部中断1服务子程序四、数据测试
一、测试仪器
2、铁片检测
3、黑带检测:
4、寻光检测:
五.调试及性能分析
整机焊接完毕,首先对硬件进行检查联线有无错误,再逐步对各模块进行调试。首先写入机控制小程序,控制其正反转,停机均正常。加入避障子程序,小车运转正常。加入显示时间子程序,显示正常。铁片检测依靠接近开关,对检测信号进行处理并实时显示,无异常状况。路程显示部分是对车后底两个红外传感器对横行和纵列分别进行脉冲计数。接着对黑带检测模块调试,发现小车会经常偏离路线或打转,经判断是因为红外线收发对管灵敏度不高,调整灵敏度后仍然达不到满意效果,疑是程序控制混乱,经过修改调试还是不能很好的行进。趋光电路主要由三个光敏电阻构成,调整三个光敏电阻的角度同时测试软件,以最佳效果完成趋光功能。整机综合调试,上电后对系统进行初始化,接着控制电机使小车向前行驶,但是当小车行进到一段时间就会自行打转,经过检查,硬件没问题,所以考虑是程序出错,但经过多次修改尝试还是不能改变。
六、结论
小车独立模块测试都没问题,但是组装后效果较差,通过各种方案的讨论及尝试,再经过多次的整体软硬件结合调试,不断地对系统进行优化,智能小车还是不能很好的运行。
附件一:简易射门机器人电路图
附件二:简易射门机器人程序
简易射门机器人程序:
#include
#define lcd1602_sent_dat P0
#define RS_CLR RS=0
#define RS_SET RS=1
#define RW_CLR RW=0
#define RW_SET RW=1
#define EN_CLR EN=0
#define EN_SET EN=1
sbit RS = P2^5; //定义液晶端口
sbit RW = P2^6;
sbit EN = P2^7;
sbit qidong=P2^4;//总开关
sbit M1A=P2^0;//电机的控制
sbit M1B=P2^1;
sbit M2A=P2^2;
sbit M2B=P2^3;
sbit heixian_qian1=P1^0;//前面黑线检测
sbit heixian_qian2=P1^1;
sbit xunguang_1=P1^2;//三个寻光
sbit xunguang_2=P1^3;
sbit xunguang_3=P1^4;
sbit hongwai_qian1=P1^5;//前面避障
sbit hongwai_qian2=P1^6;
sbit fengming=P1^7; //蜂鸣器
sbit heixian_hou1=P3^0; //后面黑线检测
sbit heixian_hou2=P3^1;
sbit jiantie_zuo=P3^3;//检铁
sbit jiantie_you=P3^4;
unsigned int x,y,tt,ff,ss,Q,G;
unsigned char z1;
unsigned char shuzi[]="0123456789";
unsigned char heng[]="ABCDEFGH";
unsigned char zong[]="012345";
unsigned char table[]="( , )";
unsigned char time[]="(00:00)";
unsigned char juli[]="000";
unsigned char code pic[8][8]={
{0xff,0xff,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0xff,0xff,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0xff,0xff},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}
};
void Delay(unsigned int z) //延时
{
while(z--);
return;
}
void LCD_write_com(unsigned char com) //写指令函数
{
unsigned int z;
RS_CLR;
RW_CLR;
EN_SET;
P0 = com;
for(z=0;z<80;z++)
_nop_();
EN_CLR;
}
void LCD_write_Data(unsigned char Data) //写数据函数
{
unsigned char z;
RS_SET;
RW_CLR;
EN_SET;
P0 = Data;
for(z=0;z<80;z++)
_nop_();
EN_CLR;
}
void LCD_write_pic(unsigned char add,unsigned char *pic_num)//自定义图形给CGRAM {
unsigned char z;
add=add<<3;
for(z=0;z<8;z++)
{
LCD_write_com(0x40|add+z);
LCD_write_Data(*pic_num++);
}
}
void zuobiao()//坐标显示
{
unsigned int z;
table[1]=heng[x];
table[3]=zong[y];
LCD_write_com(0x80+0x08);
for(z=0;z<5;z++)
{
LCD_write_Data(table[z]);
}
}
void shijian()//时间显示
{
unsigned int z;
time[2]=shuzi[ff];
time[5]=shuzi[ss%10];
time[4]=shuzi[ss/10];
LCD_write_com(0x80+0x40+0x08);
for(z=0;z<7;z++)
{
LCD_write_Data(time[z]);
}
}
void tuxing()
{
unsigned int z,i,j;
i=x;
j=y;
for(z=0;z<0x08;z++)
LCD_write_pic(z,pic[z]);
switch(j)
{
case 0:
{
LCD_write_com(0x80+i);
LCD_write_Data(0);
break;
}
case 1:
{
LCD_write_com(0x80+i);
LCD_write_Data(1);
break;
}
case 2:
{
LCD_write_com(0x80+i);
LCD_write_Data(2);
break;
}
case 3:
{
LCD_write_com(0x80+0x40+i);
LCD_write_Data(0);
break;
}
case 4:
{
LCD_write_com(0x80+0x40+i);
LCD_write_Data(1);
break;
}
case 5:
{
LCD_write_com(0x80+0x40+i);
LCD_write_Data(2);
break;
}
}
}
void xianshijuli()//显示距离
{
unsigned int m,n,z;
z=(x+y)*25;
m=z/100;
juli[0]=shuzi[m];
n=z%100;
m=n/10;
juli[1]=shuzi[m];
m=n%10;
juli[2]=shuzi[m];
LCD_write_com(0x80+0x08+0x05);
for(z=0;z<6;z++)
{
LCD_write_Data(juli[z]);
}
}
void xianshi()//显示
{
tuxing();
shijian();
zuobiao();
}
void LCD_init(void)
{
char z;
for(z=0;z<80;z++)
_nop_(); /*显示模式设置*/
LCD_write_com(0x3c);
LCD_write_com(0x0c); /*显示关闭*/
LCD_write_com(0x06); /*显示清屏*/
LCD_write_com(0x01); /*显示光标移动设置*/
for(z=0;z<100;z++)
_nop_();
LCD_write_com(0x02); /*显示开及光标设置*/
}
/****************************************************************************** ********/
/*****************小车在方格上寻迹****************************/
void dianji(unsigned char qidong)//电机控制
{
switch(qidong)
{
case 1:{M2A=M1A=1;Delay(1);M1A=1;M2A=M1A=0;break;}//前进
case 2:{M1B=M2B=1;Delay(1);M1B=1;M1B=M2B=0;break;}//后退
case 3:{M2A=M1B=1;Delay(1);M2A=M1B=0;break;}//右转
case 4:{M1A=M2B=1;Delay(1);M1A=M2B=0;break;}//左转
case 5:{break;}//停止
case 6:{M2A=M1A=1;Delay(10);M1A=1;M2A=M1A=0;break;}
case 7:{M1B=M2B=1;Delay(10);M1B=1;M1B=M2B=0;break;}
}
return;
}
void zuozhuan()//左转弯90度
{
unsigned int z;
z=10200;
while(z--)
{
dianji(4);
}
xianshi();
}
void youzhuan()//右转弯90度
{
unsigned int z;
z=10000;
while(z--)
{
dianji(3);
}
xianshi();
}
void houtui1()//后退方式1
{
unsigned char m,n,z;
z=0;
while(z!=0x03)
{
m=heixian_hou1;
n=heixian_hou2;
while(n==1)
{
n=2;
}
z=m+n;
switch(z)
{
case 0x00:{dianji(2);break;}//后退
case 0x01:{dianji(4);break;}//右转
case 0x02:{dianji(3);break;}//左转}
}
xianshi();
}
void houtui2()//后退方式2
{
unsigned char m,n,z,i;
z=0;
while(z!=0x03)
{
m=heixian_hou1;
n=heixian_hou2;
while(n==1)
{
n=2;
}
z=m+n;
switch(z)
{
case 0x00:{dianji(2);break;}//后退
case 0x01:{dianji(4);break;}//右转
case 0x02:{dianji(3);break;}//左转}
}
for(i=250;i>0;i--)
{
dianji(6);
}
xianshi();
}
void qianjin1()//前进方式1
{
unsigned char m,n,z,i;
z=0;
while(z!=0x03)
{
m=heixian_hou1;
n=heixian_hou2;
while(n==1)
{
n=2;
}
z=m+n;
dianji(1);
switch(z)
{
case 0x00:{dianji(1);break;}//前进
case 0x01:{dianji(4);break;}//右转
case 0x02:{dianji(3);break;}//左转}
}
for(i=250;i>0;i--)
{
dianji(6);
}
xianshi();
}
void qianjin2()//前进方式二
{
unsigned char m,n,z,j;
j=y;
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
youzhuan();
while(j<5)
{
while(Q==1)
{
switch(Q)
{
case 0:{dianji(2);break;}
case 1:{G=0;j=5;break;}
}
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
switch(z)
{
case 0:{dianji(2);break;}
case 1:{j++;y++;xianshi();dianji(2);break;}
case 2:{j++;y++;xianshi();dianji(2);break;} }
}
}
}
void qianjin3()//前进方式三
{
unsigned char m,n,z,j;
j=y;
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
youzhuan();
while(j>0)
{
while(Q==1)
{
switch(Q)
{
case 0:{dianji(1);break;}
case 1:{G=0;j=5;break;}
}
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
switch(z)
{
case 0:{dianji(2);break;}
case 1:{j--;y--;xianshi();dianji(2);break;}
case 2:{j--;y--;xianshi();dianji(2);break;} }
}
}
}
void xunqiu()//寻球
{
unsigned char m,n,z;
m=jiantie_zuo;
n=jiantie_you;
if(n==1)
{
n=2;
}
z=m+n;
while(z!=3)
{
m=jiantie_zuo;
n=jiantie_you;
if(n==1)
{
n=2;
}
z=m+n;
switch(z)
{
case 0x01:{dianji(3);break;}
case 0x02:{dianji(4);break;}
}
}
}
void xunji()//寻迹
{
while(x<4)
{
while(hongwai_qian1==0)
{
houtui1();
youzhuan();
while(hongwai_qian1==0)
{
zuozhuan();
houtui2();
x--;
xianshi();
youzhuan();
qianjin1();
y++;
xianshi();
zuozhuan();
}
}
qianjin1();
x++;
xianshi();
}
}
void xuntie()//寻铁
{
unsigned char m,n,z;
youzhuan();//将车头调转180度
youzhuan();
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
while(z!=2)
{
m=heixian_qian1;
n=heixian_qian2;
z=m+n;
switch(Q)
{
case 0:{dianji(2);break;}
case 1:{G=0;break;}
}
}
x++;
xianshi();
if(Q==0)
{
switch(y)
{
case 0:{qianjin2();break;}
case 1:{qianjin2();break;}
case 2:{qianjin2();break;}
case 3:{qianjin2();break;}
case 4:{qianjin2();break;}
case 5:{qianjin2();break;} }
}
if(Q==0)
{
youzhuan();
youzhuan();
qianjin3();
}
if(Q==0)
{
zuozhuan();
houtui2();
x++;
xianshi();
youzhuan();
qianjin2();
}
}
void xunguang()//寻光
{
unsigned char z;
xunqiu();
z=xunguang_2;
while(z!=0)
{
dianji(3);
}
}
void chengxuchushihua()//程序初始化{
fengming=0;
M1A=M1B=M2A=M2B=0;
Q=0;
heixian_qian1=0;
heixian_qian2=0;
heixian_hou1=0;
heixian_hou2=0;
ss=0;
tt=0;
ff=0;
TMOD |= 0x10;
EA=1;
EX0=1;//外部中断
IT0=0;
EX0=1;
IT0=0;
ET1=1;// 定时中断
TR1=1;
TH1=0x30;
TL1=0x04;
x=0;y=0;
LCD_init();
}
/*******************************************************/ void main(void)
{
chengxuchushihua();
if(qidong==0)
{
xianshi();
xunji();
xuntie();
xunguang();
//射门
xianshijuli();
}
}
void ISR_Key_0(void) interrupt 0//侧面避障
{
fengming=1;
Q=1;
}
void ISR_Key_2(void) interrupt 2//蜂鸣器
{
fengming=1;
Q=1;
}
void Timer1_isr(void) interrupt 3 //定时一秒钟
{
TH1=0x30;
TL1=0x04;
tt++;
if(tt==20)
{
ss++;
if(ss==60)
{
ff++;
ss=0;
}
tt=0;
}
}
外国牛人教你一步步快速打造首台机器人
外国牛人教你一步步快速打造首台机器人 (超详细) 这是一个方法最简单,入门最快速的机器人制造教程。 这里面说到的东西都非常简单,看过这些教程以后,你可以在几个小时内制造出一个机器人。何乐而不为呢? 由于有很多细小的东西需要你们去了解,以下就给你介绍这些东西,而没有其他。如果你对所要求的掌握的东西有两年的应用经验的话,你可以快速跳过这些介绍,然后个小时完成一个机器人的制作。尽管都很容易,但学习还是要花费时间的,为了有一个美好的周末,让我们花一些时间,去了解这全部的资料。 此处还有一起关于怎样建造机器人的另外一些资料。这主要是集中在如何使你更快速的建造机器人。你不需要了解任何的知识?你将会将所有基础性的东西做的很好。 材料需求 以前购买这些材料是非常困难的,因为没有一个专门的网店能提供所有的东西,你需要从不同的店里购买。 但幸运的是有一些网店已经根据说明提供了他们的整套装备,如: Jaxx’s shop(美国网店) Solarbotics shop(加拿大网店) Hobby2go (印度网店) 如果你从哪些网店购买东西,你还可以成为https://www.wendangku.net/doc/133336762.html,的会员,因为要成为上面名单的一员,他们要和我们联系,我们之间就会达成了一种交易。 如果你不想买LMR套装,你可以通过google从网店购到你所需要的任何配件。只要在网店上有得卖,无论你在任何国家,你都想得到你想要的产品。 无论你通过什么途径得到配件,以下这些是必须的: 一个PICAXE-28开发板
这个28针的开发板就像马里奥兄弟一样有趣,充满着各种附带的和隐蔽的功能,这会使你有兴趣在上面多次玩弄。这是一个非常好的板子,会令你迫不及待的去做机器人, 排针
简易机器人设计制作活动方案
简易机器人设计制作活动方案 发布者:章初发布时间:2012-2-12 20:00:23 [设计思路] 机器人科学知识是一项很适合在少年儿童中开展的,并深受学生喜爱的活动项目。机器人制作兴趣小组活动意在培养学生对机器人的兴趣,让学生了解和掌握机器人是如何感知光信号的;学习LOGO语言,学会会编写简单LOGO程序指挥机器人做预定动作,并利用所掌握的知识和技能制作出沿轨迹行走机器人。 活动采用分组合作研究制作方式,小组成员分工协作(2人一个小组)。教师作为活动的组织者,充分调动学生参与活动的积极性,注重培养每一个学生的科学思维能力;活动设计始终以学生为主体,有意识的进行多学科的融合与渗透,使活动具有综合性,从而培养学生良好的科学素质。 [活动目标] 1、组装富有个性的机器人; 2、学会编写程序,调试并运行机器人程序; 3、运用乐高机器人套件设计、制作自己的轨迹机器人,并进行比赛。 4、在活动中提高学生的观察、分析、动手、创造能力,培养他们的参与、竞争、实践、协作意识。 [活动对象、时间] 对象:初中学生8—10人 时间:1、利用暑假时间组织夏令营活动。 2、每周六上午进行兴趣小组活动。 [活动内容] 拼装乐高机器人,编写程序,调试机器人运行。 [活动方法] 演示、讲授、讨论、实践操作、小组合作 [活动准备] 一、9797 蓝牙套装(已有)
二、9648 蓝牙配件套装4套每套价格1350.00 三、9698 FLL(智能交通)价格1980.00 四、赛台(自制) 赛台的内部尺寸长为1143mm、宽2362mm,四周装有边框,高为100mm,如图所示。边框内侧为黑色,所有外侧和内侧边框均采用防火板。
教师参考资料_第二章简易机器人设计(1)_移动风车
科学探索活动手册教师参考资料 第二章简易机器人设计(1) 活动项目三移动风车 一、教学目标 1、强化对各种传动结构的综合应用及利用各种传动结构进行优化设计,了解动力的远距离传输与方向的改变。 2、熟悉永远循环模块、直行模块、转弯模块、启动电机模块、停止电机模块、延时等待模块等编程应用。 二、教学重点 激发学生兴趣,提高想象力。 三、主要教学方法 演示法、任务驱动法、课堂讨论法、讲授法。 四、教学准备 1、移动风车模型每小组一套; 2、中小学通用技术课程配套教材第三册《科学探索》活动手册043页《活动准备》里面的结构胶件每小组一套(有条件每人一套); 3、BDS机器人编程软件、教学课件。 五、教学过程 (一)创设情境导入 1、播放教学课件里面荷兰风车的图片。 2、旁白:有一种风景,静静地竖立在地平线上,远远望见,
仿佛童话世界一般,那一刻便注定你不能忘记,不能忘记她底衬的国度:这就是风车,荷兰的风车。今天,你能做出一部你梦想中的风车吗? (二)教学活动环节设计 1、教师展示移动风车的模型,并打开电源键,移动风会前进、转弯,当转弯时风冀会旋转。 2、让学生思考,风车旋转的动力在哪里?让学生观察风车齿轮啮合传动的各个环节。 3、引导学生做好搭建的分工,分小组进行风车模型的搭建,学生根据书本的搭建步骤搭建风车或自己设计搭建风车。教师巡视,当学生在搭建过程中遇到到问题时,引导学生分析问题、解决问题。 3、当各个小组把竞赛车搭建好之后,开始教学编程。这只是编程的一个参考,这点要和学生说明。让学生知道编程可以有个性的发挥空间。教师在投映仪上打开BDS编程界面,把永远循环模块从控制模块中拖至主程序下,然后再从执行模块菜单中把直行模块纳入永远循环模块下。接着分别拖入转弯模块(设置右转)、直行模块、转弯模块(设置左转)、直行模块、停止电机模块、延时等待模块,然后分别设计它们的对话框属性,设置参数值。这里也要继复习减速马达的正转与反转的原理,并继续复习直行模块、转弯模块的默认与主控器的连接端口与默认马达端口输出的正转方向与反
智能小车制作入门篇
智能小车制作入门篇 最近接触了很多机器人爱好者,很多人都对机器人技术展示出了浓厚的兴趣,也在计划如何动手制作自己的第一个机器人。但是似乎很多的人都摸不到门路,只能是站在大门外满怀兴趣的向内观望,观望了一阵兴趣渐失只好叹口气走开…… 很多初学者可能都是看了一些视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作机器人的念头,很多人可能并不是嵌入式开发的业内人士,甚至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手的感觉。有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄像头来读取环境信息,可以语音识别,最好还可以变形…… :—(
我的意见是:新手最好还是老老实实的从小车开始吧。人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的。一个人形机器人的成型产品最少要卖到几千块——要知道,你在开发过程中是不可能没有错误投入的。机器人小车技术上门槛较低,资金投入也少,市场上的各种产品和零配件的支持也较多,虽然简单,但可以实现的功能可一点也不少。 我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知识和一些动手经验。 那么现在我们开始,首先是理论部分——小车的控制结构。 [一]小车的整体控制系统 小车是怎么来控制的?为什么小车判断出障碍物后可以自动的绕开? 理论:控制工程——处理自动控制系统各种工程实现问题的综合性工程技术。包括对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程。它是在电气工程和机械工程的基础上发展起来的。 闭环控制:闭环控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统。 开环控制:开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,使用于对系统稳定性精确度要求不高的简单的系统。 一般稍微复杂一点的机器人小车都是闭环控制,也就是说它有一个反馈机制,会根据自己配备的各种传感器来读取环境信息,并且根据这些环境信息来决定自己下一步的行动,决定好后将行动指令发给执行系统,使机器人做出合适的动作。当然也有的机器人小车是开环控制,我就见过一个机器人小车配了一支笔,将机器人放在纸上,机器人一转,刷的一下在纸上画出一个圈来,当然由于摩擦力和机械误差等原因,画出来的圆圈可能不闭合,也可能不圆。不过人家阿Q都说了:“孙子才画的圆呢……” 有点迷糊?没关系,其实简单一点说就是这样:机器人可以分为三部分——传感器部分、控制器部分、执行器部分。
开展通用技术选修课简易机器人制作的教学实践与探索p
学校论文 开展通用技术选修课“简易机器人制作”的 有效教学实践与探究 安徽省阜阳第一中学李亚东 [摘要] 通过通用技术选修课”简易机器人制作”的教学,激发了学生学习兴趣、通过在“做中学”、“学中做”的教学方式,以及突出以学生是学习的主体,有效的学习必须建立在学习者自身的主观能动上,这是学习或教学当中的一个最根本的问题。同时要发挥教师的主导作用,在课堂上有效的时间内培养了学生的动手能力、创新能力,如通过同学小组间的机器人的竞赛,增强的学生的合作意识,培养了学生的团队精神,以及对科技的兴趣。对于全面提高学生的综合素质大有裨益,特别在技术素养方面。从而达到课堂的有效教学效果。 [关键词] 激发培养做中学学中做合作主体有效教学 在加强学生素质教育、培养学生学习兴趣、动手能力、自我学习能力、创新能力以及与国际素质教育接轨的背景下,以及最近几年来,国内省级的、国家级的,以及国际的FLL、VEX大赛,机器人各种竞赛活动如火如荼的开展着,而我市这一块才刚刚起步,我校在这一块也开始了通用技术选修课简易机器人制作的有效教学实践与探索。 简易机器人制作课程现今仅作为通用技术选修内容,简易机器人的制作本身有很强的实践性、趣味性、开放性,结果的多样性,学生感兴趣的往往是最终制作出的各式各样机器人作品。由于受限于机器人系统的知识结构体系,机器人本身涉及的知识较多,且对学生而言较难掌握,加之不同的学校设备器材采购有限,不可能满足每一个学生动手操作实践的需求。那么如何在课堂上进有有效、高效的教学,让学生快速入门,并掌握大量的复杂的有很深的相关知识,是摆在我面前的一个难题。目前我校乃至我校教学这一块尚处空白,怎么办?就这一块,我从开展通用技术选修课简易机器人制作作为切入点,做了一些课堂的有效教学实践与探究。 (注:从我校去年选拔优秀学生首次参加全省的青少年机器人比赛,其中
ABB 机器人简单操作指南
ABB机器人简单操作指南 1 机器人主要由以下两部分组成 控制柜机械手控制柜和机械手之间由两条电缆连接 可以用示教器或位于控制柜上的操作盘来控制机械手,见下图 2 机械手 下图显示了机械手上不同的轴的可移动的方向
3 控制柜 下图显示了控制柜的主要部分 示教器 操作盘主开关 驱动磁盘 4 操作盘 下图描述了操作盘的功能 电机开按钮及指示灯操作模式选择开关 急停,如果按下请拉出来工作时间计数器,显示机械手 的工作时间电机开 在电机开状态,机器人的电机被激活,Motors On按钮保持常亮. 常亮准备执行程序 快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新.电机已经打开. 慢速闪烁(1Hz)一个保护停机被激活,电机关闭.
工作模式自动(生产模式) 在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人 工作模式手动减速运行(程序模式) 在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人. 工作模式手动全速(选择,测试模式) 用来在全速情况下运行程序 急停 当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器 显示机械手工作的时间 5 示教器 见下图 控制运行 使能设备 显示屏 控制杆 急停按钮手动慢速运行:打开手动慢速运行窗口 编程: 打开编程及测试窗口
输入/输出:打开输入输出窗口,用来手动操作输入输出信号 其它:打开其它窗口如系统参数,维护,生产及文件管理窗口. 停止: 停止程序执行 对比度: 调节显示屏的对比度 菜单键: 按下后显示包含各种命令的菜单 功能键: 按下后直接选择各种命令 动作单元: 按下后手动慢速运行机器人或其它机械元件 动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线 动作形式: 轴-轴移动. 1=轴1-3, 2=轴4-6 增加: 增加手动慢速运行开/关 列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开) 返回/翻页: 按下翻页或返回上级菜单 删除: 删除选中的参数 确认: 按下输入数据
机器人制作教程
两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。去年暑假爸爸辅导我阅读《简易机器人制作》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。 一、小车功能介绍 智能机器人小车可独立完成4个功能: 1、小车碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行; 2、小车悬崖回头——小车在浅色水平桌面行进,探测到行进方向是桌子边沿时停步并转弯回头; 3、小车边走边唱——小车在行进过程中播放音乐; 4、小车走8字——小车按照8字的形状行走; 二、设计思路 最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。 1、确定任务 依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。 2、确定总方案 根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。 3、结构设计
结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。结构设计中的难点是万向轮很容易卡住,连接线不够长影响控制板安装位置。 4、控制电路设计 控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。 5、控制软件设计 软件设计首先需要制定机器人控制的输入输出分配方案: 根据所要完成的任务,绘制出控制软件的流程图草案,并最终完成软件程序流程。 6、组装调试 根据设计安装好小车,并将完成的程序写入主控制器中,然后让它试运行,再找出结构或程序的问题,不断的调试,直到将问题解决。 三、制作总结 制作成功这个智能机器人小车,我感觉很有成就感。这个制作加深了我对计算机控制基本知识的理解,激发了我继续深入学习机器人制作的兴趣。在现有小车的结构下,我还将编写新的控制程序,完成小车的第五个动作——沿黑线轨迹行走,并且进一步通过学习子程序的调用,把小车的五个动作集合到一起,通过接触传感器预先设定,完成不同的动作。未来还计划把这个小车改装成一个服务机器人,可以在不同的指定位置拿水杯、倒水和放杯。 附录一、智能机器人小车外观介绍
如何着手制作一个机器人小车--给初学者
如何着手制作一个机器人小车--给初学者 2009-02-10 09:33 来源:机器人天空原创作者:湖泊时间:2008-12-21 最近接触了很多机器人爱好者,很多人都对机器人技术展示出了浓厚的兴趣,也在计划如何动手制作自己的第一个机器人。但是似乎很多的人都摸不到门路,只能是站在大门外满怀兴趣的向内观望,观望了一阵兴趣渐失只好叹口气走开…… 很多初学者可能都是看了一些视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作机器人的念头,很多人可能并不是嵌入式开发的业内人士,甚至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手的感觉。有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄像头来读取环境信息,可以语音识别,最好还可以变形…… :—( 我的意见是:新手最好还是老老实实的从小车开始吧。人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的。一个人形机器人的成型产品最少要卖到几千块——要知道,你在开发过程中是不可能没有错误投入的。机器人小车技术上门槛较低,资金投入也少,市场上的各种产品和零配件的支持也较多,虽然简单,但可以实现的功能可一点也不少。 我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知识和一些动手经验。 那么现在我们开始,首先是理论部分——小车的控制结构。 [一]小车的整体控制系统 小车是怎么来控制的?为什么小车判断出障碍物后可以自动的绕开? 理论:控制工程——处理自动控制系统各种工程实现问题的综合性工程技术。包括对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程。它是在电气工程和机械工程的基础上发展起来的。 闭环控制:闭环控制有反馈环节,通过反馈系统使系统的精确度提高,响应时间缩短,适合
3D MAX实例教程:机器人制作过程【3dmax教程】
本教程讲述的是用Edit Mesh制作科幻机器,首先看一下效果图。 1、制作机器前面板 步骤1)制作机器的前面板。首先在front(前)视图创建一个box(长方体)物体,分别适当段数,将box(长方体)物体的length(长)值设为167.5,width(宽)值设为274.5,height(高)值为9.5,内部length segs(长度段数)为14,width segs(宽度段数)为8,heitht segs(高度段数)为3。在front(前)视图中选中box(长方体)物体并单击鼠标的右键,然后在弹出的快捷键菜单中选择convert to(转换为)>convert to editable mesh(转换为编辑网格)命令,转化成edit mesh(编辑网格)模式进行编辑,如图所示。 步骤2)在edit mesh(编辑网格)命令中选择vertex(点)编辑模式,在front(前)视图中通过edit mesh(编辑网格)命令中的点对称选择,然后用缩放工具水平缩放调节。编辑成流线的形状,两头翘起来的效果,下边用移动工具推翻了拽出垂下去的感觉,如图所示。
步骤3)在edit mesh(编辑网格)命令中选择polygon(多边形)编辑模式,在front(前)视图中选择条形的面并将其删除。删除面是为了做出镂空的效果,按键盘上的del(删除)键和edit mesh(编辑网格)命令中的delete(删除)命令都可以,效果是相同,如图。 步骤4)在edit mesh(编辑网格)命令中选择edge(边)编辑模式,下面把刚刚删除面的边缘线全部选择起来,通过extrude(挤压)命令挤出一组新面,并且通过移动工具,移动至另一侧的边缘的位置,把删除后的缺口修补上,如图。
简易机器人的基本动作与发声
《简易机器人的基本动作与发声》教学设计 一、教学内容分析: 通用技术选修模块“简易机器人制作”第三章第五节《简易机器人的基本动作与发声》(地质版)主要在学生掌握了机器人基本运动原理后,开始学习如何使用电机运动语句和电机停止语句实现对机器人的运动控制。本节是学生有通用技术课理论部分进入具体技术实践的起始,对于学生真正了解通用技术的意义具有重要作用,也是激起学生兴趣的一节课程。通过对本课学习使学生开始实践、敢于实践。教材中在简单明确基本行走动作需要控制的电机及其基本动作形式后,进入控制语句介绍部分,首先是电机运行语句指明标准语句格式同时对具体参数内容进行列表说明,“做一做”明确了实践操作步骤以及演示结果,通过对程序的分析加深学生的理解(电机停止语句和发声语句的学习部分教材结构与电机运行语句基本同)。“操作与思考”将知识进行延伸和扩展。教材其中插入了一项综合程序---走近似四边形。经过一节课的训练,最后“讨论交流”“技术实习”内化学生运用知识的能力,巩固本节课程内容。 二、教学对象分析: 高二年级学生通过高一对通用技术课程必修部分的学习,具有进行设计制作过程的基本素质和能力。通过本学期在前面课程的学习对机器人基本动作原理有所掌握,认识到机器人的各种动作以及功能是通过编程来实现的。其中个别学生具有计算机编程基础,但大多数学生还没有基础过语言编程,而且学生的动手能力不同,所以在教学的过程中要注意从基础开始,由教师指导进行操作,掌握操作基本步骤后通过自主的探究活动,进一步理解编程语言的内在含义并进行灵活应用。 三、教学目标
1.理解机器人运动的原理。学会电机控制和发声语句。 2.编程训练使学生的思维的逻辑严谨 3.使学生在探索中促进知识学习。在活动中通过自主学习、合作探究,提高解决实际问题的能力、团结协作能力以及表达的能力。 教学重点:机器人对简单程序的执行。 教学难点:是机器人达到预期执行效果。 四、教学策略及媒体运用 在教学过程中强化《技术与设计2》中的设计的一般流程以及评价过程。通过语句的学习以及实践操作消除学生对简易机器人制作的陌生感,熟练简易机器人制作的熟练性,通过边学习边实践边讨论的方式,促进学生对知识的理解和掌握。给学生创造探究性学习的机会,激发学生的学习兴趣以及探索精神。 五、教学准备: ⑴Pallbo教学机器人 ⑵机器人教学平台(实验室计算机,电工工具等) 六、教学过程:
机器人制作入门
机器人制作入门 信仰创新 如何让一个菜鸟玩转机器人,而不是被机器人玩?本文的目的就是帮助那些还未接触过机器人的朋友在短时间内制作出具有一定专业水准的机器人,如果感兴趣的人多的话,我们还可以考虑在南京创客空间开设机器人制作工坊,手把手教大家如何制作机器人。 在这之前,先让我们初步了解一下什么是机器人。 总的来说,无论是军用机器人、飞行机器人、工业机器人还是家用机器人,他们一般由四部分组成:第一,控制部分(大脑);第二,传感部分(感官);第三,执行部分(四肢);第四,主体(躯干)。机器人可以按照事先编好的程序,自动执行工作。 军用机器人
工业机器人家用机器人 飞行机器人 对很多人来说,机器人在不久之前仅仅还是科幻电影中的主角,但现在它已经成为创客们手中最常见的玩物,并且开始逐渐进入和影响我们的生活。 得益于开源软件、开源硬件以及创客运动的兴起,机器人的学习门槛大幅下降,制作成本也变得极低,因此,机器人的普及时代已经来临。下面我们按机器人的四大部分分别介绍。
第一,控制部分(大脑) 控制部分其实就是一台电脑,主要由硬件和软件两部分组成。对于很多相对简单的应用(比如制作一架电力线查勘机器人,通过摄像头检视并通过感应线圈从电力线上取电,见附图),使用硬件开源的微电脑系列ARDUINO是一个不错的选择,所谓硬件开源就是它的所有设计图纸都是开放的,你甚至可以自己生产它。不过它并不贵,最便宜的也就几十元人民币。ARDUINO针对不同的应用需要编程来实现,网上有很多针对ARDUINO不同应用的免费程序,对菜鸟来说,你可以把ARDUINO看做手机,程序则是APP应用,当然,目前还没有专门针对ARDUINO的APP商店(如果需求强烈的话,南京创客空间没准会在淘宝上建一个),如果你不想学编程的话,你只能自己在网上搜索并且下载程序,然后通过Arduino配套软件写入到ARDUINO板子中。 各种版本的Arduino
简单机器人设计原理
智能机器人设计概念 现在的科学技术突飞猛进,尤其是在计算机这方面得到了更快的发展,人们在计算机这方面做出大量的科学成果,计算机的处理能力增强和处理速度变快,当然,现在人们主要是倾向去研究计算机的智能性,那么,我们要求的是计算机的处理能力强、处理速度快、处理智能化和耐用性能好等,当然了,计算机的这些处理是为了给我们带来更高的经济效应和生活质量的提高。 在计算机不断地更新使得计算机的智能性凸显而出,而智能机器人则是计算机的一种表现形式,智能机器人的处理能力以及表现形式都是按照计算机的设计观念来设计出来的,当然了,智能机器人更比较具有自主能力,因为智能机器人相当于是将一台计算机安装了很多具有一定功能的器官,就像人的各种外部器官使其在处理过程中发挥相应的作用,而各种器官所发挥作用是靠人大脑的支配来完成的,当然,智能机器人的各器官主要取决于处理器。那么从现在的智能机器人来看的话,它的设计概念就是一种特殊的计算机,可以说是一种表现性的计算机或应用型计算机。对于智能机器人的设计当然是要处理能力强即是处理范畴广、处理速度快、处理智能化以及耐用性能好等要求,虽然是这样的设计理念,但是实现起来并非那么的容易,那么从现在的机器人来看的话,他们和人之间的差别表现在哪些方面呢? 机器人的动作表现的离散性。什么是离散性?在数学中,它表现得是不连续,是一种跳变的函数,如下图一 )(t s()t L t t 图一图二 从上面图一可以知道,是一个关于t时间函数,在一定连续的时间区间里,函数值()t s不连续的,那么我们把这种函数称为离散函数,如果说时间变量和函数值都是离散的,那么这种函数所表现出来的在信号上可称为数字信号函数,当然对应的是如果在时间和函数值都是连续的这种信号叫模拟信号函数。 在上面介绍了离散这个概念,如果说是在动作上的话,我们只需要清楚它的动作是不连贯的就行了。想必大家都看过机器舞吧,正是因为那些动作表现得不是很连续,所以才叫它机器舞,首先得动作表现上是有限的,还有就是动作不连贯,比如说太极,当然了,有的机器人是能够打太极的,关键是在动作上的表现都是靠程序代码来实现的,而代码并不是无限的几乎每一条代码都是靠人工写上去的,不可能我们能够把所有的代码都能够写上去。还有就是机器人的结构是人设计出来的,在制作方面也处在很大的缺陷,并且在一定时间里不能自动的更新自己的骨架,人是生物,是由智慧的生物,堪称是完美的物种,无与伦比。人类能进行新陈代谢而使得人不断的在身体方面得到更新,而我们却不知道这种更新过程。当然,人还可以通过神经调节来更新自己,这一点的话机器人是能够做到的。
简易机器人设计制作精彩活动方案设计设计
简易机器人设计制作活动方案 [设计思路] 机器人科学知识是一项很适合在少年儿童中开展的,并深受学生喜爱的活动项目。机器人制作兴趣小组活动意在培养学生对机器人的兴趣,让学生了解和掌握机器人是如何感知光信号的;学习LOGO语言,学会会编写简单LOGO程序指挥机器人做预定动作,并利用所掌握的知识和技能制 作出沿轨迹行走机器人。 活动采用分组合作研究制作方式,小组成员分工协作(2人一个小组)。教师作为活动的组织者,充分调动学生参与活动的积极性,注重培养每一个学生的科学思维能力;活动设计始终以学生为主体,有意识的进行多学科的融合与渗透,使活动具有综合性,从而培养学生良好的科学素质。 [活动目标] 1、组装富有个性的机器人; 2、学会编写程序,调试并运行机器人程序; 3、运用乐高机器人套件设计、制作自己的轨迹机器人,并进行比赛。 4、在活动中提高学生的观察、分析、动手、创造能力,培养他们的参与、竞争、 实践、协作意识。 [活动对象、时间] 对象:初中学生8—10人 时间:1、利用暑假时间组织夏令营活动。 2、每周六上午进行兴趣小组活动。 [活动内容] 拼装乐高机器人,编写程序,调试机器人运行。 [活动方法] 演示、讲授、讨论、实践操作、小组合作 [活动准备] 一、9797 蓝牙套装(已有)
二、9648 蓝牙配件套装4套每套价格1350.00 三、9698 FLL(智能交通)价格1980.00 四、赛台(自制) 赛台的内部尺寸长为1143mm、宽2362mm,四周装有边框,高为100mm,如图所示。边框内侧为黑色,所有外侧和内侧边框均采用防火板。 五、竞赛场地纸(市赛、省赛前购买)价格大约2000 六、台式电脑3台 七、笔记本2台(比赛时用) 八、储物箱,储物柜 九、活动室
机器人制作入门教程
根据我的经验以及美国机器人学的入门课程设置来看,控制软件的开发比机械电子部分要难,因为自学时不容易有直观的体会,也没有什么很好的教材。如果软件部分一知半解,会直接导致你只能停留在一些初级的控制算法上,一旦想让机器人做些复杂的有意思的事情就觉得束手无策。 我的建议是你争取能自己做个小游戏,只要从头到尾把物理模拟、键盘事件响应、图形渲染都实现一遍,就能对机器人涉及的各种技术有很直观的了解。Pygame 这个库对入门者是很好的选择。注意游戏的类型不能是回合制的,必须是贪吃蛇、开小车、超级马里奥这种需要对真实世界进行连续模拟的游戏。在这些小游戏的基础上如果能自己实现一下物理引擎,你对机器人学里面最关键的轨迹控制部分有更深入的了解。提到的这些都不难,但可惜的是我没发现很好的教科书,得从网上找些教程才好起步,这些教程几乎都是英文的。 物理模拟类的游戏说白了就是个软实时系统,等你对软实时系统的计算机控制有了感性认识,脑子里就容易对机器人的体系结构有比较清晰的把握。到时候再去接触单片机、FPGA、嵌入式设备,你的理解会很不一样,这些电子硬件都是为了实现你在游戏中的主循环而选用的具体设备,没有根本的区别。 成功完成第一个机器人总是最难的。 所以最好要采用KISS(Keep It Simple Stupid)方法:保持简单、目标明确!这是一个非常好的建议,因为我的第一个机器人目标定位太高,浪费了大量的资金,而且它根本没有真正的工作过。制作第一个机器人的目标应该是学习基础知识,包括:如何编写程序、怎样使用工具、弄懂用到的术语,学习基本的技术和怎样用最便宜的价格搞到机器人的零件。把你的cool机器人点子应用到你的第二个机器人上。随后你可以使用从第一个机器人上拆下来的零件来制作第二个机器人。相信我。 但是首先你要有个设计。 一个容易制作的机器人应该是什么样子呢?这看上去像一个愚蠢的问题,但是我保证好好研究一下其他机器人会对你有很大的帮助。浏览网站上机器人相关的图片。切记只看真正简单的机器人,不要在你的第一个机器人上想象和创造。如果你想制作一个能帮你拿啤酒并有视力的双足机器人,那么你只是在自找麻烦。你要做的就是不会从桌上掉下去,不会发声的两轮的机器人。对于一个初学者来说,能自己完成已经是非常难的了。被机器人最基本的驱动算法所驱动-差分驱动。前进时,两个轮子要以相同速度前进。后退时,两个轮子以相同速度后退。左转时,是左边的轮子后退而右边的轮子前进。右转时,右边的轮子后退而左边的轮子前进。你可以通过改变两个轮子的转动速度得到一些有趣的曲线。但是现在,为了保证你的第一个程序的简单,让我们保持算法的二元性。不要忘了你还需要一个小脚轮(必须是摩擦力小的)。要制作一个差分驱动器我需要有什么呢?只需要有两样东西:2个轮子和2个电机。听起简单,但我们还是需要一个整体的设计方案。 让我们先从轮子开始。大轮子会让你的机器人移动速度更快,而小的轮子会慢些。那为什么不直接用大的呢?大轮子意味着你的机器人有更小的转矩去携带沉重的负荷,大轮子也更难很好的控制位置。而且你的传感器一般跟不上位置快速的移动。
机器人入门初识EV3教案
第1课机器人入门 学习目标 1.认识机器人零件。 2.认识机器人的控制核心、电机和传感器。 3.搭建简单的机器人模型。 课堂前情 由于是第一节课,所以在课程正式开始之前,做一个简短的自我介绍,并对本门课做一个课堂要求。导入 机器人是靠自身动力和控制能力来实现各种功能的机器。它已经融入到了人们的日常生活中,取代或协助人类的工作。目前,机器人在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。 同学们心目中的机器人是怎样的呢?请同学们拿笔画一画。 不同领域的机器人有着不同的功能,但是它们都有特定的机械结构。比如生活扫地机器人、科幻电影中的机器人、动画卡通中的机器人还有我们即将要学习的乐高机器人,咱们学校的乐高版本是EV3。
在本节课中,我们来认识设计机器人结构常用的零件。 课堂实践 1 .认识零件 设计制作机器人和盖房子相似,都需要用材料或零件支撑起它们的结构。盖房子需要用到钢筋、石材、木材等材料,而搭建一个机器人则需要用到梁、轴、连接销等零件。 梁 梁是制作机器人最常用的零件之一,多用于搭建机器人的主体结构。通过梁的搭建和连接,可以组成具有各种功能的结构。 同时,梁可以作为零件的测量工具。梁上面的每一个圆孔就是一个单位。在机器人的设计过程中,会用到多种零件,搭建指南中的每个零件旁边都有一个数字标注用以区分。
如下图中标注“15”单位的梁,“15”表示的就是这个梁的长度。有些不易读取其长度的零件(如轴),你可以用梁做对比,孔的数量就是该零件的长度。 轴 轴的横截面为十字形,多用于转动结构中。轴在现实生活中很常见,工厂里的传送带,马路上的汽车 和摩托车等都需要用到轴。在机器人的设计中,轴可以与圆孔、十字形孔相连接。 轴套 轴套用于将零件固定在轴上,与生活中的螺母或垫片的功能相似。下图中黄色的零件是“1/2单位轴套”, 灰色的零件是“1单位轴套”。 连接销 连接销的种类有很多。在机器人的设计中,连接销多用于梁或其它零件的连接和固定。机器人套件中 有带摩擦的连接销、带轮轴的连接销、带套管的连接销等多种连接销。 车轮 车轮由轮毂和轮胎组成,用于组建机器人的驱动部分。 机器人控制核心 控制核心是机器人的“大脑”和“心脏”,它为机器人提供指令,控制机器人其他设备的运行。机器人通过控制核心存储并运行程序。可通过可充电电池为其充电。
简易机器人制作校本课程实施
简易机器人制作校本课程实施 李凤兰李龙王培栋孙海燕何代华 (顺义牛栏山第一中学) 一、课程的实施背景 (一)理论要求 国家的发展离不开科学技术的进步和人才素质的提高,在中学阶段,加强科技教育,整体提升青少年科技素养至关重要。《国家中长期教育改革和发展规划纲要(2010-2020年)》工作方针指出:“要以学生为主体,充分发挥学生的主动性,关心每个学生,为每个学生提供适合的教育”。为了响应国家号召和实现牛栏山一中“培养特长突出、富有创新精神的优秀中学生”的育人目标,需要有更贴近学生探索、实践、创新发展的科技类课程,而简易机器人制作模块由于具有综合性、实践性强等学科特点,非常适合对其课程资源进行进一步整合利用。 (二)实践要求 学校位于北京市远郊的顺义区牛栏山镇上,是示范高中、北京市科技示范校,95%的在校学生住宿。与市区名校相比,开展机器人教育不占优势。2003至2008年,我校逐步完成了简易机器人制作活动从起步到校本教材的编写出版和以乐高器材为主的机器人专用教室装配工作,实现了从小组教学扩大到普及型校本选修和与竞赛提高相结合的课程,积累了一定的软硬件资源,在学校中产生了非常积极的影响。 随着新课改的推行,简易机器人制作现已成为高中通用技术选修3模块,学科知识快速更新。课程的实施存在国家教材内容相对简单,现有活动器材与国家教材不配套,任课教师为兼职教师等困难。为了实现通用技术课程理念,使课程更适应学生需求,我们在现有条件下对课程内容进行了扩展和延伸并实施。 二、实施简易机器人制作校本课程的目的意义 (一)目的 1.在高中阶段参与机器人研究活动,是工程学早期人才培养的重要环节,可以为学生今后进一步学习机械设计制造、自动化、电子、程序控制等专业奠定很好的基础。 2.最终形成与学生需求相适应的校本课程,总结出经验,在中学阶段发现并培养拔尖创新人才,使学校成为机器人创新人才培养基地,最终实现与顺义区小学初中互利共赢、与高校有效对接。 (二)意义 按照高中通用技术课程标准的要求,以简易机器人制作活动为载体,以高中学生为研究对象,在校本课程实施的过程中,进一步完善学校机器人教育的平台,通过多种机器人活动,进行知识的普及与提高,进而激发学生兴趣,培养其创新精神和实际应用能力,提高科学素养。 三、简易机器人制作校本课程的实施过程 (一)编写和使用校本教材,制定课程纲要 1.编写和使用校本教材 普通高中通用技术课程标准解读——简易机器人制作指出:“简易机器人制作”涵盖了计算机、传感、智能信息处理、控制和机械等技术,体现了信息技术与机械技术的结合,体现了知识和技能的综合运用。这一模块以应用设计为主,具有思路广、用途多、实践性强等特点,能够为学生提供宽广而丰富的想象空间,有利于学生创新精神的培养和实践能力的提高。 依据通用技术课程标准、苏教版教材、乐高教材及其它相关资料,结合学科和学生特点,选取了机器人技术简介、机械结构、ROBOLAB软件编程、单片机等内容,编写并出版了《简易机器人制
机器人制作学习教程
机器人制作学习教程 一、书籍推荐 《机器人制作入门篇》 作者:(美)库克著,崔维娜等译 出版社:北京航空航天大学出版社 本书从一个业余机器人制作者的角度细致、浅显地讲述了 自制机器人的制作过程。全书以制作一个巡线机器人为主线展 开,包括工具的使用、元器件的选购、控制电路的制作、机器 人壳体的制作、运行调试等内容。 本书简单、易懂,描述细致入微,对读者制作过程中 可能遇到的问题做了详细的考虑,并提供了调试电路和解决问 题的办法。 本书除可作为机器人制作的读物外,也适合作为中学生课外科技活动的辅导教材。 《机器人制作提高篇》 作者:(美)库克著,崔维娜等译 出版社:北京航空航天大学出版社 《机器人制作》(提高篇)细致、深入浅出地讲述了 Roundabout机器人的制作过程,涉及到机械、电子、传 感器、计算机和信息处理等多学科领域,集成了机器人技 术必要的基础知识。对读者制作过程中可能遇到的问题做 了详细的考虑,并提供了调试电路及解决问题的办法,同 时将作者自己失败的经验告诉读者. ... 《机器人制作》(提高篇)除了能作为机器人制作这种业余 爱好的入门读物以外,还适合作为中学生课外科技活动的辅导教材或辅导教师的参考书。 二、教学视频 斯坦福大学公开课:机器人学 https://www.wendangku.net/doc/133336762.html,/special/opencourse/robotics.html
三、网站推荐 四、w https://www.wendangku.net/doc/133336762.html,<这网站很有用> 微博:老孟的微博《新浪》 教程:清华大学自动化系ARM教材 滚齿机动时间计算程序 零传动提高滚齿 好的作品有:《机器人DIY》作者lamp
简易机器人教学实践
简易机器人教学实践 四川绵阳中学阳春 【内容摘要】 机器人教育在国外已普遍开展,在“世界机器人王国”的日本,除了每所大学都有高水平的机器人研究和教学内容,每年定期举行各种不同层次的机器人设计和制作大赛外,日本机器人教育是从娃娃抓起。为了赶超世界教育先进水平,近年来我国也大力加强了机器人教育。 【关键词】机器人教育自主探究创新 比尔·盖茨曾预言“机器人即将重复个人电脑崛起的道路。点燃机器人普及的"导火索",这场革命必将与个人电脑一样,彻底改变这个时代的生活方式。” 机器人教育在国外已普遍开展,在“世界机器人王国”的日本,除了每所大学都有高水平的机器人研究和教学内容,每年定期举行各种不同层次的机器人设计和制作大赛外,日本机器人教育是从娃娃抓起。为了赶超世界教育先进水平,近年来我国也大力加强了机器人教育。 教育部于2003年调整信息技术课程设置内容,增添了信息技术教育中的人工智能与机器人课程,机器人教育已越来越受到重视。 主要结论与观点 机器人教育集趣味性、实践性、综合性、科学性、探究性为一体,深受广大青少年学生的喜爱,它集计算机、声、光、电等多种技术,可以让学生全面接触传感器、计算机软硬件、人工智能、自动控制、电子技术和机械工程等多个学科高新科技知识。智能机器人教学进入课堂可培养青少年学生综合素质。 我校的机器人教学还处于探索阶段,在校本课程中我们开设了两个与机器人有关兴趣活动。 一个是采用简易机器人为器材,引导学生入门,培养学生爱好的兴趣课,另一个就是采用专业乐高积木的机器人竞赛班。从单纯的为了竞赛的获奖,提高学校声誉为目的,到提高了学生的综合素质为目的,从发现现象、探索证实到全面展开研究,到初步成果的体现,证实了中学智能机器人教学实践活动能有效提高了学生的综合素质。探索出了一条全面提升全体学生综合素质的新路子。 二、探索过程 国外机器人教学实验证明,机器人竞赛不仅活动主题有趣,更重要的是其问题解决方案是开放性的,学生可以用不同的方法达到同一个目标,因而智能机器人活动能激发学生充分发挥想象力、创造力,有利于培养学生的开放性思维。 我校早在03年初,就开始参加了四川省机器人竞赛。建立了机器人活动室,成立机器人实验小组进行了机器人足球、机器人灭火、机器人创意、FLL工程赛等多个机器人实验活动,几年来,取得了相当优异的成绩,在2011年4月,更是代表中国参加了在美国举行的FLL 机器人世界锦标赛,并获得了金牌。但是机器人竞赛在大多数同学的眼中还是非常神秘与高端的。为了让更多学生体验、感悟和实践,学校从10年开始的校本教材的第二课堂中,就开设了机器人兴趣课。由于是针对大多数同学的课程,所以我们采用的是国内一家公司的简易机器人器材,相比乐高,使用起来是有许多不便,但这也影响不了学生的兴趣。老师边学边教和同学们一同学习机器人的程序设计,一同探究改装机器人,一同研究比赛方案,许多时候都是学生编出了更好的程序、首先发现一些传感器的特性、想出更好的机器人改装方案。 两年多来,我校结合自己的实际,制订了完备的活动计划和实施方案:兴趣课每周有固定两
纸盒变形机器人制作教程
变形机器人 晞妈的小作坊出品 材料: 四个瓶盖、吸铁石4-6个、纸盒子若干(可以先大概拼一下,选择大小合适的盒子) 第一步:制作头部 1.将作为身体的盒子拆开,按图示标注胳 膊、身体、头的位置,其中头部的位置及大小 由制作头部的盒子确定,如果没有合适的盒子, 也可将其余的盒子剪裁成合适的大小; 2.将头的位置剪裁掉; 3.将已经拆开的身体盒子复原,并将头部 的盒子从挖空的位置插入; 4.要注意头部盒子的长度,当头部完全缩 入身体时,头部顶端应与身体齐平,但也不能 太短,避免拉出头部时拉脱。
第二步:制作胳膊 1.将第一步中标注胳膊的两部分剪 下,贴在图中所示位置; 2.根据图中红色部分标注的尺寸,确 定制作胳膊的纸盒子的长、宽、高,为了 在变形时胳膊能够顺利的缩回身体中,纸 盒子的尺寸应略微小于图示红色部分的 尺寸; 3.将制作好的胳膊盒子,贴在标注胳 膊的地方; 4.将身体的盒子恢复原状并粘牢,试 一下胳膊是否能顺利缩回,如不能,对胳 膊的尺寸稍稍调整一下。 第三步:制作腿部 1.根据身体的长度,将制作腿部的盒子剪裁为 合适的长度(还要考虑变为汽车后的比例); 2.根据制作车轮的瓶盖的大小,在盒子上的合 适位置(腿的背面)进行剪裁,剪裁完成后将轮子 安装上并进行固定。
第四步:组装 将上述三步中制作好的身体和腿部摆放好,并用略微硬一些的纸将两部分粘在一起。 第五步:粘贴吸铁石 1.第四步粘贴完成后,将身体部分翻折, 成为汽车的形状; 2.为保证汽车上下两部分连接的紧密 性,在身体和腿上分别粘贴吸铁石,最好根 据吸铁石的大小打孔,将吸铁石嵌入,再用 胶带固定; 3.为保证汽车变形为机器人后,身体与 腿部连接的紧密性,在汽车尾部上下方分别 粘贴吸铁石; 4.粘贴完成后试一下吸力是否足够。 第六步:装饰 用一些比较薄的彩色卡纸对机器人进行 装饰(太厚的话有可能影响吸铁石的吸力)。
FANUC机器人示教器的简单认识.
FANUC机器人示教器的简单认识 示教器是主管应用工具软件与用户(机器人)之间的接口操作装置。示教器通过电缆与控制柜连接。我们在机器人的点动进给、程序创建、程序的测试执行、操作执行和姿态确认等等操作时都会使用示教器。 一、示教器开关 示教器具有如下开关: 开关功能 示教器有效开关 将示教器置于有效状态。示教器无效时,点动进给、程序创建、测试执行无法进行。 安全开关 三位置安全开关,按到中间位置成为有效。有效时,从安全开关松开手、或者用力将其握住时,机器人就会停止。 急停按钮 不管示教器有效开关的状态如何,机器人都会停止(停止方法的详情,请参照“为了安全使用”的“机器人的停止方法”)。 表一:示教器开关
二、示教器按键 示教器按键由与菜单相关的按键、与点动相关的按键、与执行相关的按键、与编辑相关的按键和其他按键组成。
(1)与应用相关的按钮 按键功能 功能键(F),用来选择画面最下行的功 能键菜单。 NEXT(翻页)键将功能键菜单切换到 下一页。
按下[MENU](菜单)键,显示出画面 菜单。 FCTN(辅助)键用来显示辅助菜单。 SELECT(一览)键用来显示程序一览 画面。 EDIT(编辑)键用来显示程序编辑界 面。 DATA(数据)键用来显示数据画面。 POSN(位置显示)键用来显示当前位 置画面。 单独按下的情况下,移动操作对象画 面。 在与SHIFT键同时按下的情况下,分 割屏幕(单屏、双屏、三屏)。 单独按下的情况下,移动到提示画面。 在于SHIFT键同时按下的情况下,移 动到报警界面。 单独按下时,按照G1→G1S→G2→G 2S→…的顺序,依次切换组、副组。 按住GROUP(组切换)键的同时,按 住希望变更的组号码的数字键,即可变更为 该组。 HANDLING TOOL(搬运工具)用示 教器上的应用专用按键。应用专用按键根据 应用而有所不同。 注释: GROUP键,只有在订购了多动作和附加轴控制的软件选项,追加并启动附加轴和独立附加轴的情况下才有效。