具有立方非线性二元机翼系统的颤振

具有立方非线性二元机翼系统的主动颤振
抑制研究
王囡囡
(山东建筑大学机电工程学院,山东,济南,251010)摘要:以具有立方非线性俯仰刚度的二元机翼系统为研究对象,采用PD控制器,根据系统的动柔度得到闭环系统的特征多项式;针对系统在多输入单输出条件下极点难以精确配置的情况下,提出了基于系统实测柔度的鲁棒控制方法,通过求解系统的极小范数最小二乘解得到系统的控制增益,实现了极限环的精确配置和期望极点在一定范围内的配置,并进一步推导出极限环的稳定判断条件;最后,通过实例验证了基于系统的动柔度可以实现单输入条件下的稳定极限环配置和多输入条件下极点的鲁棒性配置。
关键词:立方非线性、描述函数法、动柔度法、颤振抑制、极限环
Abstract: A two-dimensional airfoil with cubic nonlinearity in pitch direction is studied, by applying PD controller, the characteristic polynomial of closed-loop control system is obtained according to receptance method. A robust control method based on measured receptance is proposed against the difficulty of accurately assigning desired poles, where the control gains can be obtained by solving the minimal norm least square solution for nonlinear airfoil system.With the proposed method, limit circle can be assigned accurately and the desired poles can be assigned around a range of values, further more, the stability for assessing limit circle is derived. Lastly, by conducting an example to verify the assignment for limit circle under single input and robust control for pole under multi-input based on the receptance of system.
Keywords: cubic nonlinearity, describing function, renceptance method, flutter active control,limit circle
1 引言
机翼颤振是动气动弹性力学研究的重要内容,当飞行器在气流中以一定速度运动时,机翼结构在非定常气动力、弹性力和惯性力的耦合作用下产生的自激振荡行为[1-2]。研究非线性机翼系统的主动颤振抑制一方面可以提高系统的临界颤振速度,另一方面提高飞行器在各种突发状况下的稳定性。主动颤振抑制技术实质上是通过闭环控制,利用系统的状态和输出
反馈,产生一定的控制作用主动改变被控结构的零、极点,使不稳定状态转化为稳定状态。研究主动颤振抑制技术的方法主要有主动操纵面吸能法[3]、主动颤振抑制系统[4]、小型受动片抑制法[5]、压电作动器抑制法[6]以及基于动柔度的极点配置法[7]等。本文将基于动柔度法研究具有立方非线性俯仰刚度的二元机翼系统的主动颤振抑制方法,以实现期望的极限环配置。
2 二元机翼系统控制模型的建立
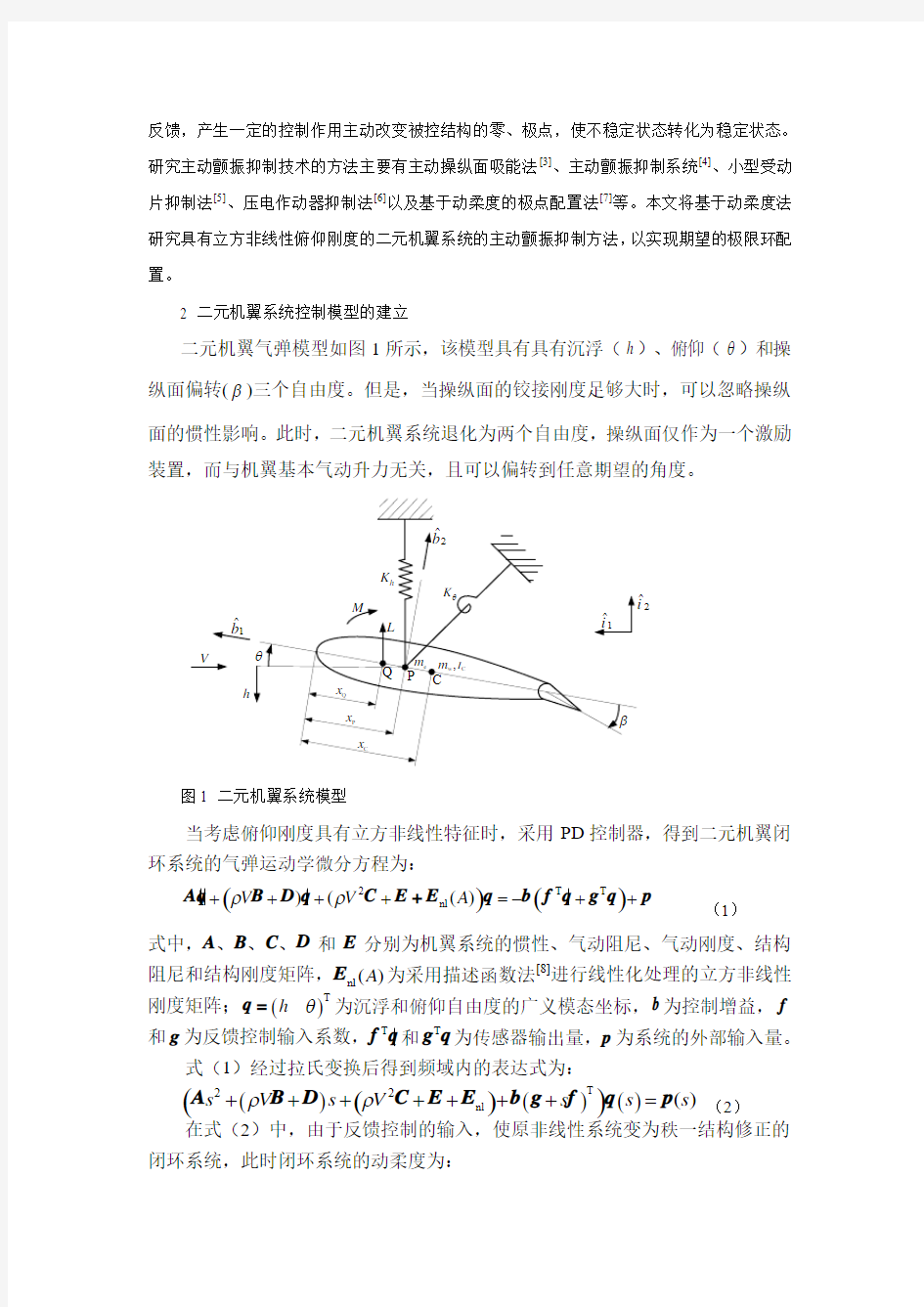
二元机翼气弹模型如图1所示,该模型具有具有沉浮(h )、俯仰(θ)和操纵面偏转(β)三个自由度。但是,当操纵面的铰接刚度足够大时,可以忽略操纵面的惯性影响。此时,二元机翼系统退化为两个自由度,操纵面仅作为一个激励装置,而与机翼基本气动升力无关,且可以偏转到任意期望的角度。
θ
V
1?b
C
x h
2?i
1?i
2?b
P
x Q
x L
M
h
K K θ
e m w C
,I m Q
P C
β
图1 二元机翼系统模型
当考虑俯仰刚度具有立方非线性特征时,采用PD 控制器,得到二元机翼闭环系统的气弹运动学微分方程为:
()()2T T nl )(()V V A ρρ++++=-+++Aq B D q C E E q b f q g q p
(1)
式中,A 、B 、C 、D 和E 分别为机翼系统的惯性、气动阻尼、气动刚度、结构阻尼和结构刚度矩阵,nl ()A E 为采用描述函数法[8]进行线性化处理的立方非线性刚度矩阵;()T
h θ=q 为沉浮和俯仰自由度的广义模态坐标,b 为控制增益,f 和g 为反馈控制输入系数,T f q 和T g q 为传感器输出量,p 为系统的外部输入量。
式(1)经过拉氏变换后得到频域内的表达式为:
()()()()
()T
nl 2
2()s
V s V s s s ρρ+++++++=A B D C E E b g f q p (2)
在式(2)中,由于反馈控制的输入,使原非线性系统变为秩一结构修正的闭环系统,此时闭环系统的动柔度为:
()()()
(
)
1
T 2
2
nl (,)s A s V s V s ρρ-=+++++++H A B D C E E b g f (3)
根据秩一结构修正矩阵的Sherman-Morrison 公式[9]可得:
T T (,)()(,)
(,)(,)1()(,)s A s s A s A s A s s A =-
+++H b f g H H H f g H b (4)
式中,(,)s A H 为非线性系统的开环动柔度,其表达式为:
()()()()
1
22nl (,)s A s V s V A ρρ-=++++H A B D C E E +(5)
3 二元机翼系统极限环配置
在非线性系统中,当闭环控制系统为单输入单输出系统时,利用极点配置可实现极限环的精确配置,但当闭环控制系统为多输入单输出系统时,无法实现期望闭环极点的精确配置,本文提出一种基于动柔度法的鲁棒控制方法,将期望闭环极点配置在一定范围内,随着系统某一参数的变化,通过计算控制增益实现闭环极点的最优配置。
假设系统的期望闭环极点为{}121
,,,n n s μμμμμ*
*=,它们都是共轭封闭
的,且所有极点满足以下椭圆条件:
22
c c 22
()()1x x y y a b ---≤(6)
式中,c x 和c y 为椭圆的中心坐标,即期望极点的实部为c Re()j x u =,虚部为
c Im()j y u =;a 、b 分别为椭圆的长半轴和短半轴。
为方便求解控制增益g 和f 的最优解,令
(,),1,2,
2j j r A j n
μ==H b (7)
当非线性系统在m 个不同幅值输入条件下时,闭环控制系统如图2所示。
()
s H T
11()s +f g T
22()s +f g T
()m m s +f g 1()
s β2()s β+
+
+-
()
x s 1()
s μ2()s μ()
m s μ-
-
()
m s β
图2 多输入闭环控制系统
根据式(6~7)得到多输入控制系统的矩阵表达式为:
()()()()()()()()()()()()()()()T T (1)T T (1)111T T (1)T
T
(1)
11
1
T T (1)T T (1)T T (1)T T (1)T T
(2)
T T (2)
111T T (2)T T (2)
111T T ()
T T ()T T ()
T T ,,,,,,,,,,,,,,,n n n n n n m m n n n m n n A A A A A A A A A A A A A A A μμμμμμμμμμμμμμμμμμμμμμμ***********b H b H b H b H b H b H b H b H b H b H b H b H b H b H b H b H ()11()111,n n m n A μ*??
?
?
-????
?? ? ???- ? ??
? ? ??? ? ??? ? ?
?? ? ?
?? ?= ??? ? ?
?? ? ??? ? ?
?? ? ??? ? ??
? ? ?
?? ?
?-?
???
?????
?
g g f f (8)
式(8)可以简化为:
[]2221
21
mn n mn n ?????
= ???g G h f (9)
利用式(9)求解控制增益g 和f 的值时,分两种情况讨论:
第一种情况:当1m =时,系数矩阵G 是一个2n 阶的满秩方阵,且
([)2Rank n =G b ],此时,式(9)表示含有2n 个未知数的2n 个方程;
第二种情况:当1m >时,系数矩阵G 是列满秩矩阵,即()2Rank n =G ,但
([)21Rank n =+G b ],式(9)表示矛盾方程组或不相容方程组,此时,该系统是在多个输入幅值条件下的超定非线性系统。
超定方程组的解不是唯一的,但存在一个最小2-范数解,且该解是唯一的,即
()'2min n ∈????
= ? ?????
g f g g h f f C G -(10)
因此,求解控制增益的值主要是求矩阵G 的Moore-Penrose 广义逆。为了使系统的所有极点位于期望的椭圆范围内,可以利用迭代法进行求解。
3 极限环稳定性分析
当二元机翼系统的俯仰自由度具有立方非线性时,当风速增加到某一数值时,系统的平衡点由稳定状态变为不稳定状态并产生极限环现象。根据Hopf 分岔定理及Routh-Hurwitz 判据[10]可以判断机翼系统在颤振速度邻域内的稳定性。对于二元机翼闭环控制系统,可以通过调节控制增益使不稳定的极限环变为稳定极限环。
由式(4)得到系统的特征多项式为:
T 1()(,)0s s A +=+f g H b (11) 进一步得到控制增益的方程为:
()()[]T T
(,)(,)1s A s s A ????=- ??
???
g H b H b f (12)
在式(12)中,令()()T
T
(,)(,)(,)V s A s A s s A ??
=?
?H b H b ,则根据极限环稳定判断
原则得到:
()T T
(,)(,)P
V A s V A s A A A ?????== ?
?????g g f f (13)
()
T T (,)(,)P
V A s V A s s
s s ??
???== ??????g g f f (14)
如果非线性系统的极限环是稳定的,则必须满足以下条件: ()T
T (,)(,)Re Re 0P P V A s V A s conj conj A s A A ??
????
?????????=?> ? ? ? ? ??????????
?????g g f f (15)
令
0(,)(,)Re T
A A V A s V A s conj s i A A ω=???????=
? ?=?????
?R (16)
此时,
此时,式(15)可以简化为:
()T
T Re 0
P P conj A s ??
????
???=> ? ? ??????
???g g f R f (17)
不定式(17)分两种情况讨论:
第一种情况:如果矩阵R 是对角矩阵,则式(17)易求解;
第二种情况:如果矩阵R 是非对角矩阵,则应根据矩阵的二次型将其转化为实对角矩阵,即
(
)()()T
T T
T
T
T
T
T 1
122??
??
????==+ ? ? ? ?????
??
??g g g g
f R
g f R g f R R f f f (18)
因此,具有立方非线性二元机翼闭环控制系统的极限环稳定判断条件最终转化为:
()T
T T 1
10
22????+> ? ?????g g f R R f (19)
4 实例分析
表1 二元机翼基本参数
参数
符号 值 机翼展长 (m) s 1.2 机翼弦长 (m) c 0.35 单位面积质量 (kg/m 2)
m 200 机翼前缘与气动中心的距离 (m) x Q 0.0875 机翼前缘与弹性轴的距离 (m) x p 0.117 机翼前缘与质心的距离(m) x C 0.1472 升力线斜率(m) a w 2π 额外质量 (kg) m e 6.5 沉浮刚度 (N/m) K h 5000 俯仰刚度 (Nm/rad) K θ
100 无量纲俯仰阻尼导数 M θ
-1.2 风速 (m/s) V
0-70 大气密度 (kg/m 3) ρ 1.225 操纵面弦长与总弦长之比 E 0.2 操纵面展长(m)
s β
0.3
二元机翼非线性系统的结构和气动基本参数如表1所示,立方非线性俯仰刚度系数设定为nl 10e =,则根据描述函数法进行拟线性化的非线性结构刚度矩阵为:
nl 2
nl 00
()304A e K A θ???
?=???
?E
考虑二元机翼系统为单输入单输出闭环系统的极限环配置问题,当选定的风速大于开环系统的颤振速度时,非线性系统将出现极限环颤振,根据极限环理论
计算得到极限环的频率为37.8Hz ω=,极限环的幅值为0.1944rad A =。
假设预配置的极限环的幅值为0.05rad n A =,极限环的频率为32.29Hz n ω=时,计算得到系统的控制增益的极小范数解为:
0.001470.00651??=????g ,0.029520.02423-??
??-??
=f 将控制增益g 和f 代入式(19)中得到:
()T
T
T 0.051
125.39032.29
22n n A ω=????+=> ? ?=????g g
f R R f
因此,预配置的极限环是稳定极限环。
当初始值为((0),(0),(0),(0))(0,0,4.276,0)h h θθ=时,根据以上控制增益得到二元机翼闭环控制系统俯仰自由度的时间历程响应和相轨迹如图2所示。从图2(a )可以看出,系统稳定时俯仰自由度的振幅为5deg ,与期望配置的极限环幅值一致;闭环系统收敛于稳定的极限环。
-0.06-0.04-0.020.020.040.06时间 (s)俯仰 (d e g )200
俯仰(deg)
仰0
10
20
30
-6
-4-20
2
4
6
时间(s)
俯仰(d e g )-5
-400
-200
400
俯速率(d e g /s )时间 (s)俯仰 (d e g )
俯仰 (deg)俯仰速
度 (d e g /s )
(a
)时间历程响应
0060402020406时间 (s)-200
仰0
10
20
30
-6-4
-2
24
6
时间(s)
-5
5
-400
200
400
俯仰(deg)
俯速率(d e g /s )时间 (s)俯仰 (deg)俯仰速
度 (d e g /s )
(b )相图
图2二元机翼俯仰自由度的时间历程响应和相图
考虑二元机翼系统为多输入单输出闭环系统,当风速为30m/s 时,不考虑立方非线性项,二元机翼开环系统的特征值为:
1,23,48.892726.22040.966236.7082i
i
λλ=-±???
=±?? 由开环系统的特征值可以看出,沉浮自由度的极点位于复平面的左半平面,因此沉浮自由度运动在该速度下是稳定的,最终收敛于零平衡点;而俯仰自由度
的极点位于复平面的右半平面,因此俯仰自由度运动在该速度下是不稳定的,可能产生极限环颤振。根据开环系统的特征值选择机翼非线性闭环系统的初始配置极点为:
1,23,4
8.892726.2204020.1506i
i λλ=-±???
=±?? 因此,期望配置的椭圆中心分别为(8.8927,26.2204)-±和(0,20.1506)±;同时设置期望配置的俯仰自由度极限环幅值为(0.02,0.05,0.08)A =;设定椭圆的长、短半轴分别为2和1。由于配置椭圆的大小对系统的鲁棒稳定性有很大影响,因此为了使机翼非线性系统的收敛速度更快,应选择合适的椭圆范围。
由于系统为多输入单输出系统,根据迭代循环计算得到非线性闭环系统控制增益的极小范数最小二乘解为:
1.13020.1132??=????g ,0.75210.0264????-??=f 5 结论
(1)本文以俯仰刚度具有立方非线性特征时的二自由度机翼系统为研究对象,采用PD 控制器,设计系统的反馈控制律,得到系统的闭环控制模型,进一步根据秩一结构修正矩阵的Sherman-Morrison 公式得到系统的开环动柔度。
(2)基于动柔度法,根据系统的特征多项式,研究了系统在单输入和多输入两种情况下利用极点配置实现系统的极限环配置问题,利用迭代循环求解得到控
制增益的极小范数最小二乘解,实现了系统的鲁棒性极点配置,并根据极限环稳定判断条件推导出机翼闭环系统的极限环稳定时需要满足的条件。
(3)通过实例验证了基于动柔度法对具有立方非线性俯仰刚度的二元机翼系统在单输入条件下的稳定极限环的配置和多输入条件下极点的鲁棒性配置。
参考文献:
[1] 陈桂彬,杨超,邹丛青.气动弹性设计基础[M].北京:北京航空航天大学出版社,2010. [2] Livne E. Future of airplane aeroelasticity[J]. Journal of Aircraft, 2003, 40(6): 1066-1092. [3] E.Nissim, John J. Berken.Control Spanwise Placement in Active Flutter Suppression
Systems[J]. NASA Technical Paper, 1988, 9:28-37.
[4] Pratt, R.W.Flight Control Systems: Practical Issues in Design and Implementation[M]. London,
TJ International, Padstow, Cornwall, 2000.
[5] Jeffrey, D., Zhang X., and Hurst, D. W.. Aerodynamics of Gurney Flaps on a Single-Element
High-Lift Wing[J]. Journal of Aircraft, 2000,37(2):295-301.
[6] C.Y .Lin, E.F.Crawley, J.Heeg. Open and Closed loop Results of Strain-actuated Acitve
Aeroelastic Wing[J]. Journal of Aircraft, 1996, 33(5):987-994.
[7]Ram, Yitshak M, Mottershead, John E. Receptance method in active vibration control[J].
AIAA Journal, 2007, 45(3):562-567.
[8]Slotine J J E, Li W. Applied nonlinear control[M]. New Jersey: Prentice hall, 1991.
[9]Zimmermann H. Aeroservoelasticity[J]. Computer methods in applied mechanics and
engineering, 1991, 90(1): 719-735.
[10]Wright J R, Wong J, Cooper J E, et al. On the use of control surface excitation in flutter
testing[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2003, 217(6): 317-332.
,
飞行基础知识:机翼形状与飞行速度的关系
飞机能上天,就是机翼产生升力的结果。但是飞机上天后,机翼也产生阻力,影响飞机前进,所以机翼的形状、大小关系到飞机的速度。随着气动理论的完善、制造工艺的提高以及新材料的不断应用,机翼的性能经过多次改进,已今非昔比。 早期的飞机机翼都是平直的。最初是矩形机翼,很容易制作。但由于其翼端宽,会给飞机带来阻力,严重地影响了飞机的飞行速度。为此,人们曾设计了一种椭圆形机翼。这种新机翼的翼端虽然窄了,但其制作工艺却十分复杂,很难制作。后来,人们又设计出了梯形机翼。梯形机翼兼具矩形和椭圆形机翼之长,制作也比较方便,尽管仍有一个小小的翼尖,但阻力还不算大。因此,20世纪30年代至40年代末,梯形平直机翼几乎一统天下。二战中出名的飞机如美国的P-51、苏联的杜-2、日本的零式战斗机等都是梯形平直机翼。 1945年,英国研制了两架飞机,安装了当时最先进的喷气发动机,飞机平飞的最大速度达到974千米/小时。若从12000米高度俯冲到9000米高度时,速度甚至达到1120千米/小时,接近音速。但机翼上出现了“激波”,使机翼表面的空气压力发生变化,空气作用力的总作用点后移,飞机会自动俯冲。当时飞机的操纵系统和舵面的大小等,都没有考虑这种情况,所以不可能把俯冲状态中的飞机拉起来平飞。大角度的俯冲,使飞机增速更快,最后,超出它本身能承受的强度,所以飞机就散架解体了。 机翼上产生激波后,飞机的阻力会急剧增加,比低空飞行大十倍甚至几十倍,所以即使用喷气式发动机,也很难使飞机超音速。当时把这种困难叫做“音障”。德国人发现,把飞机的机翼做成后掠的形式,像燕子的翅膀,可以延迟“激波”的产生,减少阻力,也可以缓和飞机接近音速时自动俯冲的不稳定现象。1948年,美国在F-86战斗机上应用后掠机翼。原苏联在上个世纪40年代末期,也研制出带后掠机翼的喷气式歼击机米格-15。进入20世纪50年代,世界上超音速飞机的翅膀几乎全都是后掠机翼的。 20世纪五六十年代,人们设计飞机的指导思想是越高越快就越好。为了达此目的,机翼的后掠角越来越大。而为了保证飞机的安全,又要加重钢梁,加厚蒙皮。但飞机重量增加了,又直接影响飞机的速度和高度。怎么办?人们把后掠机翼的前缘和平直机翼的后缘结合起来,设计制作出了三角机翼。从俯视角度看,三角机翼飞机的两只机翼连接起来是一个等腰三角形,刚度明显增强。1963年8月试飞的美国SR-71飞机就是三角机翼,其大部分用钛合金制成,最大飞行速度相当于音速的3.5倍,飞行高度可达2.4万米。法国“幻影”系列飞机也采用了三角机翼。20世纪60年代三角机翼又风靡一时。 飞机机翼采取向后掠的形式后,又出现了新问题,它比不向后斜的普通机翼,在同样的条件下产生的升力小。飞机起飞时,要滑跑到很大速度,才能使升力等于重量,然后飞机才能离去,跑道要很长,着陆的情况也一样。因此,现代歼击机起飞跑道多在1000米以上,重型轰炸机起飞跑道大于2000米。所以现代大型机场跑道的长度都要超过3000米,战时很容易被敌人破坏。在空中巡航时,后掠翼飞机比普通机翼飞机耗费油料多,航程也会受影响。于是,有人研究出一个方案,就是使机翼能改变后掠角。起飞、着陆和巡航时,机翼在平直位置;要飞大速度时,机翼向后斜。要想让一架普通飞机改变它的机翼后掠角,首先要解决飞机的平衡问题。原来机翼在平直位置平衡好的飞机,当机翼向后转,加大后掠角时,升力作用点向后移,飞机会低头俯冲,不能飞行。经过多次试验,1964年,世界上第一架变后掠翼飞机F-111终于研制成功。这种飞机在起飞、着陆和低速飞行时,其两翼尽量伸直,后掠角只有16度,从而具备了平直机翼升力大的特点;而在高速飞行时,它的两翼又尽量后掠,后掠角可达72.5度,变得像三角机翼一样,因此能够轻易突破“音障”。其后苏联也相继推出了变后掠翼飞机米格-23、苏-20和苏-24等。 要改变机翼的后掠角,其实是很难的。机翼前后转动,要用很大的轴承和坚固的结构,这样,变后掠翼飞机的重量要增大。不过,随着气动力学的发展,人们发现边条机翼可以为其后方的基本机翼提供升力。所谓边条机翼就是在基本机翼根部前缘加装一条后掠角大于70度的