GPS静态测量及数据处理

南方GPS静态测量及数据处理(实例)
GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。主要用于建立各种级别的控制网。进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。
使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点:
1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度;
2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通
道,其距离不小于50米;
3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等);
4、地面基础稳定,易于点的保存;
5、充分利用符合要求的旧有控制点。
GPS点位选好后,就可以架站进行静态数据采集了。在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。
用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。
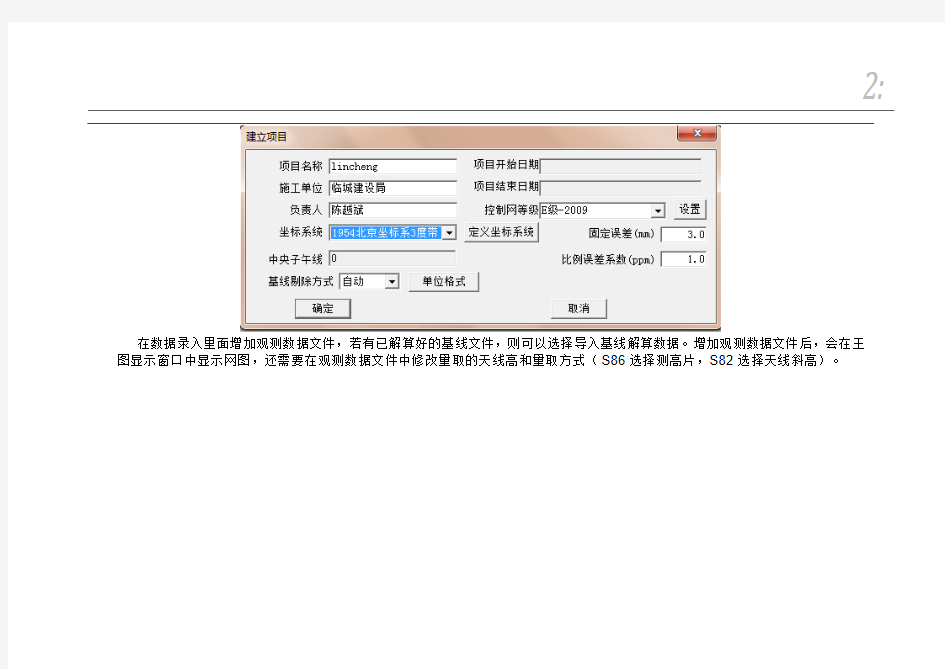
打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3
度带。控制网等级设置为E级,基线剔除方式选着自动。
在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
修改完观测数据文件里的量取的天线高和量取方式,就要进行基线解算了。在基线解算中点击全部解算,软件就会自动解算基线,若基线解算合格就会显示为红色,解算不合格就会显示为灰白色。在基线简表窗口中可以查看解算的结果。
解算不合格的基线需要进行调整,在网图中双击不合格的基线会弹出基线状况对话框,在该对话框中调整高度截止角和历元间隔后再解算,直至合格为止。原来的高度截止角为20,现在调整成15后,解算后基线已经合格了,由原来的灰白色变成了红色。
基线全部解算合格后,就需要看闭合环是否合格,直接点击左侧的闭合环就可进行查看。若闭合环不合格,则还需要调整不合格闭合环中的基线,使得闭合环和基线全都合格;若闭合环合格,就要录入已知点的坐标数据,然后进行平差处理。要录入坐标数据可
以在数据输入中点击坐标数据录入,在弹出的对话框中选择要录入坐标数据的点,录入坐标数据;或者在测站数据中选择对应的点直接录入坐标数据。
录入完坐标数据就可以进行平差处理了,在平差处理中依次点击自动处理、三维平差、二维平差、高程拟合,就能得到平差结果,这包括组网、三维自由(约束)网平差、二维网约束平差、高程拟合平差、平差成果表和7参数结果,这可以在成果输出窗口里查看。其中主要是需要平差成果表和7参数结果。平差报告可以打印或输出(文本文档格式)。
实验报告GPS静态测量
实验四GPS静态测量 一、实验目的 实验的目的是使学生了解采用GPS定位技术建立工程控制网的过程,使所学理论知识与实践相结合,巩固和加深对新知识的理解,增强学生的动手能力,培养学生解决问题、分析问题的能力。通过学习,应达到如下要求: 1、熟练掌握GPS接收机的使用方法,外业观测的记录要求。选点、埋石的要求。 2、合理分配时段、掌握星历预报对时段的要求。PDOP值的大小对观测精度的影响,图形结构的设计及外业工作。外业观测时手机或对讲机的合理应用。 3、掌握GPS控制测量数据处理处理的流程,能独立完成基线解算及网平差 二、实验地点: 城市学院校区内,实验学时:4小时 三、实验前的准备工作 1、实验内容介绍:对实验的任务和意义作好充分了解。 2、使用的仪器及物品:GPS接收机(含电池)、基座、脚架若干台,作业调度表,外业观测手簿,小钢尺,铅笔,安装有传输软件和数据处理软件的计算机,数据传输线若干根,便携式存储器。 3、搜集资料 ①广泛收集测区及其附近已有的控制测量成果和地形图资料 a.控制测量资料包括成果表、点之记、展点图、路线图、计算说明和技术总结等。收集资料时要查明施测年代、作业单位、依据规范、坐标系统和高程基准、施测等级和成果的精度评定。 b.收集的地形图资料包括测区范围内及周边地区各种比例尺地形图和专业用图,主要查明地图的比例尺、施测年代、作业单位、依据规范、坐标系统、高程系统和成图质量等。 c.如果收集到的控制资料的坐标系统、高程系统不一致,则应收集、整理这些不同系统间的换算关系。 (注:本实验采用地科系2013年5月建立的校园控制网资料) ②收集有关GPS测量定位的技术要求 通过参考测量规范,收集有关的测量技术要求。GPS测量规范包括: a.《全球定位系统GPS测量规范》GB/T 18314-2009 b.《工程测量规范》 GB 50026-2007
最新南方GPS静态测量及数据处理(实例)上课讲义
南方测绘石家庄GNSS产品蔡高峰 GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。主要用于建立各种级别的控制网。进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。 使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点: 1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度; 2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米; 3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等); 4、地面基础稳定,易于点的保存; 5、充分利用符合要求的旧有控制点。 GPS点位选好后,就可以架站进行静态数据采集了。在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。 用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。 打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。控制网等级设置为E级,基线剔除方式选着自动。 在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
GPS测量操作与数据处理复习资料
第一部分GPS静态测量第一章 GPS静态测量基础 1相对定位指的是在进行GPS定位时,多台同步接收机进行同步观测,采集同步观测数据;在数据处理时,则利用这些同步观测数据,计算出同步观测站之间的相对位置(坐标差/基线向量。) 2数据处理过程一般包括基线处理、网平差、坐标转换和高程转换,最终求出高精度的网点坐标。 3 GPS测量型接收机一般分为单频和双频两大类。单频GPS测量型接收机,接收信号:GPS 导航电文、C/A码、L1载波。双频GPS测量型接收机(双频GPS测量仪),接收信号:GPS 导航电文、C/A码伪距、P码伪距、L1载波相位、L2载波相位。 第二章 GPS静态测量工作的流程 1一般GPS静态测量工作分为三个阶段,即测前准备、玩野实施和数据处理。 2测前准备阶段的主要工作包括项目立项、技术设计、实地踏勘、设备检定、资料收集整理、人员组织等。 3测量实施的内容包括:实地了解测区情况、卫星状况预报、确定作业方案、外业观测。 4 GPS基线向量网被分成了A、B、C、D、E五个级别。 C级网为地方控制网和工程控制网;D级网为工程控制网;E级网为测图网。 5 GPS网常用的布网形式有以下几种:跟踪站式、会战式、多基准站式、同步图形扩展式、单基准站式。 跟踪站式:若干台接收机长期固定安放在测站上,进行常年、不间断的观测,即一年观测365天,一天观测24小时,这种观测方式很像是跟踪站,因此,这种布网形式被称为跟踪站式。特点:不间断的连续观测,观测时间长,数据量大,采用精密星历,成本高。 会站式:在布设GPS网时,一次组织多台GPS接收机,集中在一段不太长的时间内,共同作业。在作业时,所有接收机在若干天的时间里分别在同一批点上进行多天、长时段的同步观测,在完成一批点的测量后,所有接收机又都迁移到另外一批点上进行相同方式的观测,直至所有的网点观测完毕,这就是所谓的会站式的布网。特点:较长时间、多时段观测,可以较好地消除SA等因素,有特高的尺度精度。 多基准站式:就是有若干台接收机在一段时间里长期固定在某几个点上进行长时间的观测,这些测站称为基准站。在基准站进行观测的同时,另外一些接收机则在这些基准站周围相互之间进行同步观测。 同步图形扩展式:就是多台接收机在不同测站上进行同步观测,在完成一个时段的同步观测后,又迁移到其他的测站上进行同步观测,每次同步观测都可以形成一个同步图形。在测量过程中,不同的同步图形间一般有若干个公共点相连,整个GPS网由这些同步图形构成。 特点;扩展速度快,图形强度较高,作业方法简单。 单基准站式:又称做星形网方式,它是以一台接收机作为基准站,在某个测站上连续开机观测,其余的接收机在此基准站观测期间,在其周围流动,每到一点就进行观测,流动的基准站之间一般不要求同步,这样,流动的接收机每观测一个后四段,就与基准站间测得一
GPS静态控制测量外业操作指南60743
GPS控制测量外业作业要求及技术指南 一:外业观测作业人员操作内容 安置接收机天线(严格对中整平、定向、量取仪器高)、设置接收机中的参数(如观测模式、截止高度角、和采样间隔等;如不设参数,接收机一般就采用缺省值),以及开机、关机等工作,其他工作由接收机自动完成。 二:操作流程:【选点与埋石——GPS接收机的检查——观测方案设计——观测作业——外业观测成果质量检核】 1.选点准备: 根据收集的测区内及周边现有平面和高程控制点以及测区地形图等,依据项目任务书或合同书以及相关规范的要求在图上进行设计,标绘处计划设站的区域。 1.1选点的基本要求 基本要符合规范(全球定位系统GPS测量规范GB/T18314-2009)的相关要求: A)测站四周视野开阔,高度角15°以上不允许存在成片的障碍物 B)远离大功率无线电发射源,以免损坏接收机天线,高压
电线50米至少,大功率无线发射源至少200米。
C)测站远离房屋、围墙、广告牌、山坡及大面积平静水面(湖泊、池塘)等信号反射物,以免出现严重的多路径 效应。 D)点位应位于地质条件良好、点位稳定、易于保护的地方,并尽可能顾及交通条件。 1.2选点作业 A)测量人员应按照在图上选择的初步位置以及对点位的基本要求,在实地最终选定点位,并做好相应的标记。 B)利用旧点时,应对旧点的稳定性、可靠性和完好性进行检查,符合要求时方可利用。 C)点名以该点位所在地命名,无法区分时,可在点名后加注(一)、(二)。 D)新旧点重合时,应沿用旧点名,一般不应更改。 E)选点工作完成后,应按规范要求的形式绘制GPS网选点图,可以用相机或手机拍照片。 提交的资料:①点之记②GPS网选点图 1.3 埋石 C、D、E及GPS点在满足标石稳定、易于长期保存的前提下, 均可根据具体情况选用。 提交的资料:标石建造的照片
GPS静态控制测量方案
兰州市水源地建设工程项目(第11-1标段) GPS静态测量方案 编制: 审核: 审批: 中国建筑第六工程局有限公司 兰州市水源地建设工程项目(第11-1标段)项目部 2015年12月
目录 3 1.工程概况............................................................................................................. 4 2.编制依据............................................................................................................. 3.适用范围............................................................................................................. 4 4.测量人员的组成及仪器设备 (5) 5 5.平面控制测量..................................................................................................... 7 6.高程控制测量..................................................................................................... 7 7.测量资料管理及上报......................................................................................... 7 8.质量保证措施..................................................................................................... 9.总结..................................................................................................................... 8 8 10.附录...................................................................................................................
GPS静态测量数据处理
GPS静态测量数据处理 (2007-05-02 14:04:12) 转载▼ 标签: 分类:GPS专题 gps 数据后处理 静态 一、基线解算的类型 1、单基线解 (1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。 (2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。 2、多基线解 (1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。 (2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。 (3)多站整体解(绝对坐标) (4)单基线解算的过程
(5)利用基线解算软件解算基线向量的过程 二、基线解算结果的质量评定指标 1、单位权方差因子 (1)定义:
(2)实质:反映观测值的质量,又称为参考方差因子。越小越好。 2、RMS - 均方根误差 (1)定义: (2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。 3、数据删除率 (1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。 (2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。数据删除率越高,说明观测值的质量越差。 4、RATIO (1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。 (2)实质:反映了所确定出的整周未知数参数的可靠性,这一指标取决于多种因素,既与观测值的质量有关,也与观测条件的好坏有关。 5、RDOP (1)定义:所谓RDOP值指的是在基线解算时待定参数的协因数阵的迹的平方根,RDOP值的大小与基线位置和卫星在空间中的几何分布及运行轨迹(即观测条件)有关,当基线位置确定后,RDOP值就只与观测条件有关了,而观测条件又是时间的函数,因此,实际上对与某条基线向量来讲,其RDOP值的大小与观测时间段有关。 (2)实质:表明了GPS卫星的状态对相对定位的影响,即取决于观测条件的好坏,它不受观测值质量好坏的影响。 6、同步环闭合差 (1)定义:同步环闭合差是由同步观测基线所组成的闭合环的闭合差。 (2)实质:由于同步观测基线间具有一定的内在联系,从而使得同步环闭合差在理论上应总是为0的,如果同步环闭合差超限,则说明组成同步环的基线中至少存在一条基线向量是错误的,但反过来,如果同步环闭合差没有超限,还不能说明组成同步环的所有基线在质量上均合格。 (3)限值: ,
2019年HGO静态数据处理教程lecerque
HGO教程 目录 一.安装HGO软件 ................................................................................................... 错误!未定义书签。二.处理原始数据....................................................................................................... 错误!未定义书签。三.打开HGO软件 ................................................................................................... 错误!未定义书签。四.设置项目信息....................................................................................................... 错误!未定义书签。五.导入静态文件....................................................................................................... 错误!未定义书签。六.数据质量检查....................................................................................................... 错误!未定义书签。七.化简GPS网型..................................................................................................... 错误!未定义书签。八.初步处理基线....................................................................................................... 错误!未定义书签。九.精化处理基线....................................................................................................... 错误!未定义书签。十.设定控制点........................................................................................................... 错误!未定义书签。十一.网平差............................................................................................................... 错误!未定义书签。十二.导出................................................................................................................... 错误!未定义书签。
GPS实例静态测量及数据处理
GPS实例静态测量及数据处理 主要论述GPS基本原理及静态测量应用。 标签:GPS静态 0 引言 随着我国经济的繁荣;促进了交通事业的发展;公路建设速度和规模也迅猛提高;通车里程及干线公路比重也在逐年加大。虽然近几年公路建设的标准和质量在提高;但不可否认的是测绘水平还比较落后。主要表现在测绘方式单一;不能根据道路的不同环境选择合理的测绘方法。此外;测绘技术含量不高;测绘效率低下;不能满足大规模测绘工作的需要;而且测绘方法通常不被重视;忽视长期的、可持续发展的社会效益。因此;提高道路测绘管理水平;采取科学有效的方法对道路进行及时测绘;为经济发展提供安全、舒适、畅通的公路基础设施;就显得迫在眉睫。 近年来;全球定位系统(Global Positioning System-GPS)作为新一代的卫星导航定位系统;经过二十多年的发展;已发展成为一种被广泛采用的系统;它的应用领域和应用前景已远远超出了该系统设计者当初的设想;目前;它在航空、航天、军事、交通、运输、资源勘探、通信、气象等几乎所有领域中;都被作为一项非常重要的技术手段和方法;用来进行导航、定时、定位、地球物理参数测定和大气物理参数测定等。特别在交通和地形测量方面尤为突出。 GPS地区虽然开始应用;但在很多技术环节方面还很不成熟;处在摸索阶段。本文将结合我地区实际;通过试验和研究应用全面系统地GPS测量基层技术;主要研究内容包括以下几个方面: GPS定位原理; GPS静态定位在测量中的应用; 布设GPS网; GPS静态的内业处理; GPS注意事项; GPS营口地区点的分布。 1 GPS定位原理 GPS(Global Positioning System)主要根据空中卫星发射的信号;确定空间
静态GPS控制测量使用技术方法
静态GPS控制测量使用技术方法 1控制点的布设 为了达到GPS测量高精度、高效益的目的,减少不必要的耗费,在测量中遵循这样的原则:在保证质量的前提下,尽可能地提高效率、降低成本。所以对GPS测量各阶段的工作,都要精心设计,精心组织和实施。建议用户在测量实施前,对整个GPS测量工作进行合理的总体设计。 总体设计,是指对GPS网进行优化设计,主要是:确定精度指标,网的图形设计,网中基线边长度的确定及网的基准设计。在设计中用户可以参照有关规范灵活地处理,下面将结合国内现有的一些资料对GPS测量的总体设计简单地介绍一下。 1、确定精度标准 在GPS网总体设计中,精度指标是比较重要的参数,它的数值将直接影响GPS网的布设方案、观测数据的处理以及作业的时间和经费。在实际设计工作中,用户可根据所作控制的实际需要和可能,合理地制定。既不能制定过低而影响网的精度,也不必要盲目追求过高的精度造成不必要的支出。 2、选点 选点即观测站位置的选择。在GPS测量中并不要求观测站之间相互通视,网的图形选择也比较灵活,因此选点比经典控制测量简便得多。但为了保证观测工作的顺利进行和可靠地保持测量结果,用户注意使观测站位置具有以下的条件: ①确保GPS接收机上方的天空开阔GPS测量主要利用接收机所接收到的卫星信号,而且接收机上空越开阔,则观测到的卫星数目越多。一般应该保证接收机所在平面15°以上的范围内没有建筑物或者大树的遮挡。 图5-1 高度截止角 ②周围没有反射面,如大面积的水域,或对电磁波反射(或吸收)强烈的物体(如玻璃墙,树木等),不致引起多路径效应。 ③远离强电磁场的干扰。 GPS接收机接收卫星广播的微波信号,微波信号都会受到电磁场的影响而产生噪声,降低信噪比,影响观测成果。所以GPS控制点最好离开高压线、微波站或者产生强电磁干扰的场所。邻近不应有强电磁辐射源,如无线电台、电视发射天线、高压输电线等,以免干扰GPS 卫星信号。通常,在测站周围约 200m 的范围内不能有大功率无线电发射源(如电视台、电台、微波站等);在 50m 内不能有高压输电线和微波无线电信号传递通道。 ④观测站最好选在交通便利的地方以利于其它测量手段联测和扩展; ⑤地面基础稳固,易于点的保存。
GPS测量与数据处理
GPS测量与数据处理自学指导及参考习题 第一部分 内容提要:本部分主要教授全球定位系统的产生、发展及前景和GPS的应用。与GPS的产生背景有关部分,重点介绍第一代卫星导航定位系统——子午卫星系统的原理及其局限性。与GPS应用有关的部分,重点介绍GPS在军事、交通运输、及测量等领域中的应用。 习题: 1、举例说明GPS在测量领域中的应用。 答:(1)用GPS建立和维持全球性的参考框架; (2)建立各级国家平面控制网; (3)布设城市控制网、工程测量控制网,进行各种工程测量; (4)在航空摄影测量、地籍测量、海洋测量中的应用。(《GPS测量与数据处理》,P7) 2、“Transit系统是一个连续、独立的卫星导航系统”这种说法正确吗,为什么? 答:这种说法不正确。子午卫星系统(Transit)中没有采用频分、码分、时分等多路接收技术。接收机在某一时刻只能接收一个卫星信号,这就意味着子午卫星星座中所含的卫星数不能太多。为防止在高纬度地区的视场中同时出现两颗子午卫星从而造成信号相互干扰的可能性,子午卫星星座中的卫星一般不超过6颗,从而使中低纬度地区两次卫星通过的平均间隔达1.5h 左右。由于各卫星轨道面进动的大小和方向不一,最终造成各轨道面之间的间隔疏密不一。相邻轨道面过密时会导致两颗卫星同时进入用户视场,造成信号相互干扰,此时控制中心不得不暂时关闭一颗卫星使其停止工作。轨道面过疏时用户的等待时间有可能长达8~10h。导航定位的不连续性使子午卫星系统无法称为一种独立的导航定位系统,而只能成为一种辅助系统。(《GPS测量与数据处理》,P3) 3、名词解释:多普勒计数 答:若接收机产生一个频率为的本振信号,并与接收到的频率为的卫星信号混频,然 后将差频信号()在时间段[,]间进行积分,则积分值,称为多普勒计数。 第二部分
gps静态测量数据处理
gps静态测量数据处理 一、基线解算的类型 1、单基线解 (1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。 (2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。 2、多基线解 (1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。 (2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。 (3)多站整体解(绝对坐标) (4)单基线解算的过程
(5)利用基线解算软件解算基线向量的过程 二、基线解算结果的质量评定指标 1、单位权方差因子
(1)定义: (2)实质:反映观测值的质量,又称为参考方差因子。越小越好。 2、RMS - 均方根误差 (1)定义: (2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。 3、数据删除率 (1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。 (2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。数据删除率越高,说明观测值的质量越差。 4、RATIO (1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。
GPS静态控制测量网平差报告
FJ -3 工程测量技术交流群18874248 省道S 229南坑至源头段 二级公路改建工程 GPS 静态控制测量 网平差报告 萍 乡 公 路 勘 察 设 计 院 二○一一年九月 目 录 一、 GPS 控制点成果表…………………………………………1 二、 GPS 控制点网示意图………………………………………1 三、 GPS 控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
GPS静态数据处理
GPS静态控制内业数据处理(LGO) 新建项目与原始数据输入 打开LGO软件,点击左侧的项目图标,在右侧空白处点击右键选择“新建项目”,创建一个新项目。 在出现的对话框中,可以根据控制网的等级设置限差值。 点击菜单栏上的“输入”,选择“原始数据”中“System 1200/GPS 900 原始数据”,选择数据卡中“DBX文件夹”中在手簿中所创建的作业名称,输入原始数据。依次输入各台GPS所测的静态原始数据。亦可在文件类型中选择输入RINEX文件。
输入完毕后,在“GPS-处理”中,可以看到所输入的原始数据点名、开始与结束时间以及时段长,右键点击所要编辑的点,选择“编辑点”或“属性”可以修改点名及天线类型。亦可右键点击所要编辑的点,选择输出RINEX格式文件,方便他人使用。 如果使用RINEX格式文件,则需点选“工具-输入原始数据”,在出现的对话框中把文件类型选为“RINEX 文件”。然后输入原始数据。
基线处理过程及网平差 在输入了所有的原始数据,并把天线类型及天线高进行改正后,可以进行基线处理。 基线处理模式分为手工和自动两种。手工处理模式可以结合实际情况及需要进行设计如何计算数据。自动处理模式是从选择的时段中自动处理根据一组约束条件组合而成的所有的合理的极限。它只能选择流动站,不能选择参考站。LGO会自动选择合适的参考站。处理顺序依赖于“自动处理参数” 中定义的参数。点击菜单栏中“GPS-处理”中的“处理参数”,在弹出的对话框中点选“自动处理”选项卡。 只有当处理模式设置成自动时,才可以使用自动处理参数。自动处理参数实际上是协助用户在自动处理的模式下进行基线计算的选取。 “公共事件数据的最短时间”:同步观测时间的最短时间。同步时间短于300s,不予解算。这在剔除个别较短重叠时段时十分有用。 “最大基线长度”:解算基线的最大长度。经查,大概是批量处理个别较长 基线时用到。 “处理方式”:选择“全部基线”的话,LGO按照基线最短时间和最大基线长度为前提处理所有可能的相关基线。选择“独立设置”的话,LGO只处理一
GPS工程测量及数据处理研究文献综述
本科毕业论文 文献综述 题目:GPS在工程测量中的应用及数据处理 姓名:赵建平学号2009303200901 专业:地理信息系统 指导教师:苗洁职称讲师 中国·武汉 二○一三年一月 分类号密级
华中农业大学本科毕业论文 文献综述 GPS在工程测量中的应用及数据处理GPS in Engineering Measurement and Data Processing 学生姓名:赵建平 学生学号:2009303200901 学生专业:地理信息系统 指导教师:苗洁讲师 华中农业大学资源与环境学院 二○一三年一月
Ⅰ目录 1.GPS和工程测量等相关概念2 1.1GPS相关概念2 1.1.1 GPS概念2 1.1.2 GPS技术2 1.1.3 GPS卫星测量原理3 1.1.4 GPS 测量的技术特点3 1.2 工程测量介绍4 2. GPS 在现代工程测量中的具体应用分析5 2.1实时动态(RTK>定位技术简介5 2.2 静态GPS在工程测量中的应用6 2.3 动态GPS在工程测量中的应用7 3.工程测量及数据处理7 3.1工程控制网数据处理方法7 3.2 GPS基线处理与质量控制8 3.2.1 GPS基线边的解算8 3.2.2 各种检核计算9 3.2.3 平差计算和成果分析9 4.分析与总结10 5.参考文献11 6.致谢11
GPS工程测量及数据处理研究 Ⅱ摘要:GPS测量技术具有测量时间短、技术含量高、精确度高等优点,在工程测量实践中发挥着越来越重要的作用。本文主要通过介绍GPS的系统组成、工作原理、技术特点等基本情况,系统总结了GPS技术在工程测量中的应用情况,及其在工程测量后的数据处理方法。 Ⅲ关键词:全球定位系统; GPS测量技术;工程测量;应用。静态测量;动态测量;数据处理 1.GPS和工程测量等相关概念 1.1GPS相关概念 1.1.1 GPS概念 GPS是英文Navigation SatelliteTiming And Ranging/Global PositioningSystem 卫星测时测距导航/全球定位系统)的简称,而其中文简称为“球位系”。GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 1.1.2 GPS技术 GPS定位技术的高度自动化及其所达到的高精度和具有的潜力,也引起了广大测量工作者的极大兴趣。当时GPS定位基本上只有一个作业模式——静态相对定位,两台或若干台GPS接收机安置在待定点上,连续同步观测同一组卫星1-2h或更长一些时间,通过观测数据的后处理,给出各待定点间的基线向量,在采用广播星历的条件下,静态定位可取得5mm+1×10-6D<双频)或10mm+2×10-6D<单频)基线解精度。随着技术的发展,快速静态定位为短基线测量作业闯出了一条新路,大大提高了GPS测量的劳动生产率。一对GPS测量系统<双频)在10km以内的短边上,正常接收4-5颗卫星5min左右,即可获取5-10mm+1×10-6D的基
gps静态测量技术总结
gps静态测量技术总结 各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢 《gps静态测量技术总结》是一篇好的范文,好的范文应该跟大家分享,这里给大家转摘到XX。篇一:GPS静态测量与数字化测图技术总结 GPS静态测量与数字化测图技术总结 班级:测绘12-2班学号:31218082**姓名:* * 2015年7月8日 GPS静态数据处理技术总结 一、测区概述 雁山区位于桂林市南部,全境多石山和丘陵。本次实习测区主要范围为桂林理工大学雁山校区与广西师范大学雁山校区周边,整个测区大致位于东经110°16’06”- 110°18’58”,北纬25°03’05”- 25°07’35”之间。测区范围内山区
较多,道路复杂,房屋众多,植被虽然较茂密,但是平坦空地也不少,布点位置相对地域开阔,便于进行GPS观测。 二、技术依据 1、《GPS与数字化测图实习指导书》; 2、《技术设计书》; 3、《全球定位系统城市测量技术规程》(CJJ 73-1997); 4、《全球定位系统(GPS)测量规范》(GB/T 18314-2001)。 三、坐标系的选择 GPS网的无约束平差平面坐标系统选用WGS-84坐标系,3°带高斯克吕格投影,中央子午线精度为111°,测区投影分带为6°带的第19带,3°带的第38带。四、起算数据如下表 五、仪器设备和软件 GPS控制测量采用南方GPS接收机和中海达GPS接收机,其静态相对定位精度为:静态基线±(5mm +1ppmD);高程±(10mm+2ppmD)。 这些GPS测量系统配备有星历预报软件、后处理解算软件,完全能满足GPS
控制测量数据处理的要求。 XX南方数据转换软件为南方GPS 后处理程序,基线结算及平差软件为中海达HGO数据处理软件,能够基线向量处理、GPS网平差软件、多种GPS数据格式转换等功能,完全能满足GPS控制测量数据处理的要求。 六、GPS静态测量方案GPS流程图: 开始 选点布网 数据采集 工具:数据传输软件(功能模块)结果:记录在接收机中的原始数据数据传输 工具:数据传输软件(功能传输模块) 结果:记录在计算机中 的原始数据 格式转换工具:格式转换软件(功能模块) 结果:标准格式数据
南方GPS静态测量及数据处理(实例)上课讲义
南方G P S静态测量及数据处理(实例)
南方测绘石家庄GNSS产品蔡高峰 GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。主要用于建立各种级别的控制网。进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。 使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点: 1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度; 2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米; 3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等); 4、地面基础稳定,易于点的保存; 5、充分利用符合要求的旧有控制点。 GPS点位选好后,就可以架站进行静态数据采集了。在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。 用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。 打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。控制网等级设置为E级,基线剔除方式选着自动。 在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
- GPS静态数据处理步骤
- GPS数据采集和处理
- GPS做静态测量
- GPS静态数据检算各参数定义
- 南方GPS静态测量及数据处理(实例)
- GPS静态测量数据处理
- 静态GPS控制测量使用技术方法
- 南方GPS静态测量及数据处理(实例)
- 静态GPS 介绍及静态作业、数据处理流程
- GPS实例静态测量及数据处理
- GPS静态控制网数据处理步骤
- GPS测量数据处理一PPT演示文稿
- 静态GPS-介绍及静态作业、数据处理流程
- 南方GPS静态测量及数据处理实例
- GPS静态测量及数据处理
- 南方GPS静态测量及数据处理.doc
- GNSS测量与数据处理试题
- GPS静态控制测量外业操作指南.
- 最新南方GPS静态测量及数据处理(实例)上课讲义
- 南方GPS静态测量及数据处理