移动机器人导航模型的设计方法

移动机器人导航模型的设计方法
胡晓敏 张友军 朱淼良
(浙江大学计算机系 杭州 310027)摘 要 本文针对自主式移动机器人的系统结构,利用Petr i 网建立了同步和异步两种流水线模
型,并分析了各自的特点和性能:同步流水线模型适用于功能模块工作时间大致相等且稳定的场合,能发挥精确、安全的优势;异步流水线模型则具有更快的处理速度.
关键词 自主式机器人体系结构,P etr i 网,流水线,同步,异步
1 引言
自主式移动机器人是一个对外界环境高度开放的智能系统,需要对各种复杂的道路状况作出实时感知和决策,控制运动机构完成各种驾驶动作,实现道路跟踪、避障、越野等功能,并尽可能提高机器人的移动速度,这就要求移动机器人的体系结构能够合理组织调度,使机器人各子系统在自主地完成局部问题求解时显示出较高的性能与智能,而且还能相互协作,通过调度机构完成全局性的任务.这涉及到各个组成子系统如何根据环境的变化互相配合共同完成行驶任务的问题.这属于移动机器人的导航模型的建模问题.由于Petr i 网能够精确描述系统中事件之间的依赖关系和并发关系,对于智能机器人来说,是一种合适的建模工具.本文试就用Petri 网建立两种流水线调度模型,并对两种模型进行分析和实验论证.
2 机器人中的流水线调度
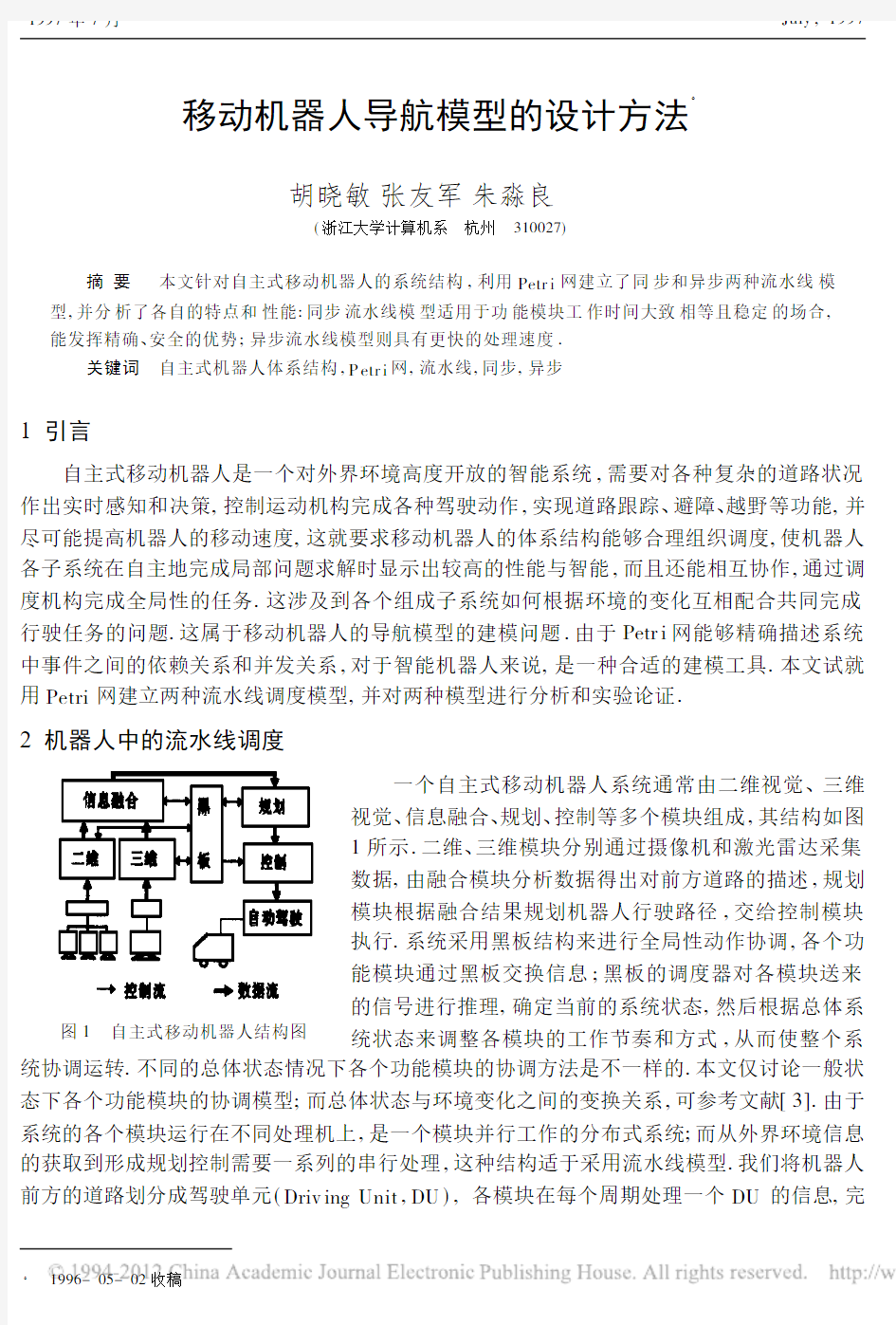
图1 自主式移动机器人结构图一个自主式移动机器人系统通常由二维视觉、三维
视觉、信息融合、规划、控制等多个模块组成,其结构如图
1所示.二维、三维模块分别通过摄像机和激光雷达采集
数据,由融合模块分析数据得出对前方道路的描述,规划
模块根据融合结果规划机器人行驶路径,交给控制模块
执行.系统采用黑板结构来进行全局性动作协调,各个功
能模块通过黑板交换信息;黑板的调度器对各模块送来
的信号进行推理,确定当前的系统状态,然后根据总体系
统状态来调整各模块的工作节奏和方式,从而使整个系
统协调运转.不同的总体状态情况下各个功能模块的协调方法是不一样的.本文仅讨论一般状态下各个功能模块的协调模型;而总体状态与环境变化之间的变换关系,可参考文献[3].由于系统的各个模块运行在不同处理机上,是一个模块并行工作的分布式系统;而从外界环境信息的获取到形成规划控制需要一系列的串行处理,这种结构适于采用流水线模型.我们将机器人前方的道路划分成驾驶单元(Driv ing Unit ,DU ),各模块在每个周期处理一个DU 的信息,完1997年7月机器人 ROBOT July ,1997
1996-05-02收稿
图2 流水线工作模型示意图成后将处理结果送交下一模块,在下一周期即可处
理下一个DU 的信息.如图2所示:其中(a )是机器
人行驶的示意图;(b)是功能模块的时序图;DU i 为
t i 时刻机器人看到的视野.在t 0时刻,机器人行驶在
DU -3,规划模块处理DU -2的数据,融合模块处理
DU -1的数据,二维、
三维视觉模块则在采集DU 0的数据;在下一时刻,各模块则分别处理的DU -2、
DU -1、DU 0、DU 1数据;以此类推.这种流水线工作
方式,虽然从每一DU 的处理过程看,所需的时间并
没有减少,然而,从整体效果看,却是每隔一拍流出一个DU 处理结果,各模块在时间上并行运行,数据串行传递,从而大大提高信息处理的效率.这里可以看出:整个系统存在多种流程和不同的环节,有黑板系统与各个功能模块之间的控制协调环节,也有功能模块之间的横向串行流程.为保障这错综复杂的系统各个环节各个模块能正常工作,不致产生阻塞、死锁等不协调的情况出现,需要一种强有力的分析设计工具.Petri 网是一种理想的模型.一般流水线采用同步方式,但为了提高效率,也需要对异步进行考察.下面我们就同步、异步两种情况用Petri 网来建模和分析.
3 流水线模型的设计与分析
3.1 同步流水线模型
同步流水线是指各模块根据统一的时钟信号由黑板控制进行同步工作.由于控制模块只在异常情况下接受黑板调度器的指令,这里只讨论在正常简单环境的总体状态情况下二维、三维、融合、规划4个模块和黑板调度器的工作情况.用Petri 网可以表示如图3所示.图中库所和变迁的含义分别见表1和表2.
表1 同步流水线Petri 网中库所的含义
p1
开始计时的时钟p 12二维模块发给黑板的信号p 23空闲的融合模块处理机p2
有效的周期信号p 13三维模块发给黑板的信号p 24空闲的规划模块处理机p3
空闲的黑板调度器p 14融合模块发给黑板的信号p 25将工作的二维模块处理机p4
空的二维信号缓冲区p 15规划模块发给黑板的信号p 26将工作的三维模块处理机p5
空的三维信号缓冲区p 16将要工作的黑板调度器p 27将工作的融合模块处理机p6
空的融合信号缓冲区p 17调度器发给二维的命令p 28将工作的规划模块处理机p7
空的规划信号缓冲区p 18调度器发给三维的命令p 29等待融合处理的三维数据p8
等待调度的二维信号p19调度器发给融合的命令p30等待融合处理的二维数据p9
等待调度的三维信号p20调度器发给规划的命令p31等待规划处理的融合数据
p 10
等待调度的融合信号p 21空闲的二维模块处理机p 11等待调度的规划信号p 22空闲的三维模块处理机 图3中上半部分是黑板推理调度的描述,下半部分从左到右依次是二维、三维、融合、规划各模块工作过程的描述.当p 2,p 3,p 8~p 11中都有token 时,t 10发生,时钟重新开始计数;调度器推理.推理结果即为发送给各个模块的启动信号,分别用p17~p20表示.各模块的工作过程以融合模块为例说明:p23表示处于空闲状态的融合处理机,p19表示来自黑板的启动信号,p29表示来自三维模块的数据,p30表示来自二维模块的数据.当这4个库所都有token 283第19卷第4期胡晓敏等: 移动机器人导航模型的设计方法
时,t14发生;to ken迁移到了表示处于工作状态的融合处理机的p27上,则t18可以发生,表示融合处理机正在工作;经过一定处理时间后,to ken迁移到p23,p31和p14,即融合处理机处于空闲状态,处理结果数据送给规划模块,并给黑板发送一个信号.p6表示空的融合信号缓冲区,当缓冲区为空时,融合信号被接受,token迁移到p10,成为等待黑板调度的信号.
表2 同步流水线Petr i网中变迁的含义
t1时钟计数t8融合信号放入黑板缓冲区t15规划模块可以开始工作t2二维模块未按时完成工作t9规划信号放入黑板缓冲区t16二维模块工作
t3三维模块未按时完成工作t10黑板调度器可以开始推理t17三维模块工作
t4融合模块未按时完成工作t11黑板调度器进行推理t18融合模块工作
t5规划模块未按时完成工作t12二维模块可以开始工作t19规划模块工作
t6二维信号放入黑板缓冲区t13三维模块可以开始工作
t7三维信号放入黑板缓冲区t14融合模块可以开始工作
图3 同步流水线Pet ri网模型
从Petri网模型可以看出流水线周期由时钟信号控制.当时钟信号到达时,如果黑板上已有各模块送来的待处理信号,说明各模块都已完成一个DU的处理,则可根据系统当前状态启动各模块开始下一个DU的处理工作;否则p4~p7中有缓冲区仍为空那么t2~t5中的一个变迁将发生,t10至少需待下一个时钟信号到达才能发生,则周期被延长一拍.同时系统将采取减速等措施来适应流水线周期的变化.
我们将时延变迁ti的延时设为T i.分析模型的时延变迁可知表示时钟周期T的T1应该满足:T1≥m ax(T16,T17,T18,T19)+T11,其中T11为调度器推理时间;T16,T17,T18,T19分别为二维、三维、融合和规划模块的工作时间,取其最大值才能保证各模块一般能在一个周期内完成工作.而从数据采集到得到路径规划至少需要3个时钟周期.根据模型得
到的系统各模块和调度器的时序关系如图4所示.我们利用Petri网的可到达标识集来判断系统是否会发生死锁现象.算法如下:
图4 同步流水线时序图
将初始标识M0放入待处理标识集;
w hile待处理标识集中有标识do
begin取出一个标识M;
对每一个变迁t,如果M[t>M′,则将M′放入待处理标识集,并记M′为M的后继标识;
将M移入可到达标识集;
end
判断可到达标识集中每一个标识M,若可到达M0,则记该标识是安全的.
若可到达标识集中每个标识M都是安全的且变迁集中每个t至少发生一次,则系统不会284 机 器 人1997年7月
发生死锁.我们所建的模型经该算法验证不会发生死锁现象.
同步流水线具有优点(1)流水线的周期稳定,有利于机器人的安全.(2)各个模块同步工作,不会因流水线堵塞而发生缓冲区溢出的问题.但是在同步方式下,一个DU 的处理时间为3T ,系统对环境变化的反应有一定的延误;如果模块工作时间不稳定或某个模块工作时间特别长,则延误比较大,因此同步流水线模型适用于模块处理时间接近的场合,否则宜采用下一节中的异步流水线.
3.2 异步流水线模型
异步方式实际上是数据驱动的工作方式,每个工作模块完成任务后就向调度器报告结果,同时自身转入空闲待命状态;调度器则根据各模块送来的结果进行推理确定新的系统状态,并发送给工作模块;处于空闲状态的工作模块若收到调度器送来的状态信息并有新数据输入,就图5 异步流水线Petr i 网模型
可转入工作状态.其Petri 网表示如图5所
示.
图5基本结构与图3相同.仍以融合模
块为例说明工作流程.p15表示处于空闲状
态的融合处理机,p11表示来自黑板的启动
信号,p 24表示来自三维模块的数据,p 26
表示来自二维模块的数据.当这4个库所都
有token 时,t9发生;token 迁移到p25、p27
和p19,表示二维、三维数据缓冲区为空,融
合处理机正在工作;融合处理完毕,token
迁移到p23,如果融合数据缓冲区有空即
p28有to ken 时,数据送入p29,同时将信号
发送给黑板.当表示空闲的黑板调度器的p 1有to ken 时,t 2发生,调度器进行推理,
推理结果送到p11作为融合模块的启动信号.融合模块又开始下一轮的工作.由于二维、三维数据同为融合模块的输入信息,必须都完成采集处理后融合模块才能工作;而且同时采样有利于保证数据的精度,因此,二维、三维模块采取局部同步的工作方式.
分析异步流水线模型的时延变迁,可知在理想情况下,系统从信息采集到完成规划的延时为:max (T 11,T 12)+T 13+T 14+T 4+T 5+T 6≤3*T ,其中T 4,T 5,T 6分别为调度器推理各模块信号的时间,一般远远小于功能模块的工作时间.T 11,T 12,T 13,T 14分别为二维、三维、融合和规划模块的工作时间.可以看出:只有当功能模块工作时间相等时,异步与同步效率相当;否则异步的总体时间比同步短,特别是如果有某个模块工作时间特别长或模块的工作时间随环境而变化时,则异步方式处理延时要小得多.但是,各模块之间工作时间不同或不稳定,会造成流水线的堵塞现象,我们在系统中设置一定数量的缓冲区来暂存数据,调节流水线的流动速度.一旦发现流水线出现堵塞现象,则认为系统进入异常状态,一方面可采取减速等措施保证机器人行驶安全,一方面抑制处理速度快的模块暂停工作来消除堵塞现象.图中描述的是用一个数据缓冲区的情况.当结果缓冲区不空时,模块的处理结果不能送给下一模块,本身也不能开始下一轮的工作,从而缓解堵塞.调度器根据内部时钟来判断各模块的工作情况.通过对时延变迁的仿真,我们可以计算出最合适的缓冲区数目.
285第19卷第4期胡晓敏等: 移动机器人导航模型的设计方法
286 机 器 人1997年7月4 实验和结论
利用Petri网建模既为验证系统性质提供了科学依据,同时也为系统实现提供了一种便利的手段.同步流水线模型已在“八五”攻关项目智能机器人集成调试中得到应用.实验是在自主式移动机器人ATB1上进行的.A TB1是由大型面包车改装而成的,装有多个摄像机、激光雷达、超声传感阵列等,用于各种道路网和越野实验.我们取DU为4~6m;机器人行驶最高速度V为5m/s;各功能模块的工作时间分别在200ms~500ms之间,黑板的推理时间<10ms.根据DU,V与流水线周期T的关系,T只需小于1s即可;由于各模块工作时间都在500m s之内,为充分利用系统的计算资源,我们将流水线周期取为500ms,每个周期处理的DU有部分重叠,可利用这些冗余信息得到更精确的规划.如果出现异常情况,比如前方道路有较多障碍而造成数据量剧增,各模块的工作时间将延长,有可能超过流水线周期.这时流水线周期将延长一拍.由于DU有重叠,而且可采取减速等措施,足以保证机器人的安全.在历时两个多月的集成调试过程中,各个功能模块工作时间比较稳定,基本上未出现流水线周期延长的情况.所以同步流水线模型充分发挥了稳定安全的优点,各模块在黑板调度器的指挥下密切配合,并行工作.机器人在完全无人的情况下,自动地沿着道路行驶,并能完成避障、分叉、越野等功能.
异步流水线模型目前只应用于仿真实验.取同步实验中的模块工作时间进行仿真,可以发现由于三维模块是系统的瓶颈,所以总的调度次数相差不多,但对于每个DU的处理同步模型需要1.5s,而异步模型只需1s.DU处理时间的减少可使机器人的控制更为灵活.
这些实验验证了同步和异步流水线模型的性能,说明用Petri网建模有很强的实用价值.
参 考 文 献
1 Visw anad ham N,Nar ahari Y.Perform ance M odeling of Automated M anufactu ring System.Prentice-Hall,Inc,1992
2 袁崇义,佩特里网.东南大学出版社.1989
3 朱淼良.基于多智能体的实时并发式智能机器人结构.高技术通讯.1995,5(1)
DESIGN OF NAVIGATION MODEL FOR
AUTONOMOUS MOBILE ROBOT
HU Xiaom in ZHANG Youjun ZHU Miaoliang
(De p artment of Computer S cience&E ng ineering,Zhej iang Univ er sity,H angz hou310027)
Abstract In t his paper,based on autono mous mo bile r obot,we pr esent sy nchr onous a nd asy nchr ono us pipeline models using Petr i Net.A t the same t ime,w e analy se the char acteristics and per fo rmances of both models.Synchro nous pipeline mo del is quite suit able if the w or k time of functio n modules is abo ut the same and steady.A sy nchr ono us system can manag e it mo re quickly.
Key words A uto no mous ro bot ar chitecture,petri net,pipeline,synchro no us,asynchro no us
作者简介
胡晓敏:女,24岁,硕士研究生.研究领域:人工智能、智能机器人.
张友军:男,26岁,博士研究生.研究领域:机器人体系结构、计算机视觉.
朱淼良:男,50岁,教授.研究领域:智能机器人、计算机视觉.
移动机器人导航技术总结
移动机器人的关键技术分为以下三种: (1)导航技术 导航技术是移动机器人的一项核心技术之一[3,4]"它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动"目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等"其中,视觉导航15一7]通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航"它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向,而基于非结构化环境视觉导航是移动机器人导航的研究重点。 (2)多传感器信息融合技术多传感器信息融合技术是移动机器人的关键技术之一,其研究始于20世纪80年代18,9]"信息融合是指将多个传感器所提供的环境信息进行集成处理,形成对外部环境的统一表示"它融合了信息的互补性,信息的冗余性,信息的实时性和信息的低成本性"因而能比较完整地,精确地反映环境特征,从而做出正确的判断和决策,保证了机器人系统快速性,准确性和稳定性"目前移动机器人的多传感器融合技术的研究方法主要有:加权平均法,卡尔曼滤波,贝叶斯估计,D-S证据理论推理,产生规则,模糊逻辑,人工神经网络等"例如文献[10]介绍了名为Xavier的机器人,在机器人上装有多种传感器,如激光探测器!声纳、车轮编码器和彩色摄像机等,该机器人具有很高的自主导航能力。 (3)机器人控制器作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一"目前,国内外机器人小车的控制系统的核心处理器,己经由MCS-51、80C196等8位、16位微控制器为主,逐渐演变为DSP、高性能32位微控制器为核心构成"由于模块化系统具有良好的前景,开发具有开放式结构的模块化、标准化机器人控制器也成为当前机器人控制器的一个研究热点"近几年,日本!美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构!网络功能的机器人控制器"我国863计划智能机器人主题也已对这方面的研究立项 视觉导航技术分类 机器人视觉被认为是机器人重要的感觉能力,机器人视觉系统正如人的眼睛一样,是机器人感知局部环境的重要“器官”,同时依此感知的环境信息实现对机器人的导航。机器人视觉信息主要指二维彩色CCD摄像机信息,在有些系统中还包括三维激光雷达采集的信息。视觉信息能否正确、实时地处理直接关系到机器人行驶速度、路径跟踪以及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性的作用。视觉信息处理技术是移动机器人研究中最为关键的技术之一。
移动机器人定位系统设计方案
移动机器人定位--传感器和技术 摘要 确切的了解车辆的位置是移动机器人应用的一个基本问题。在寻找解决方案时,研究人员和工程师们已经开发出不同的移动机器人定位系统、传感器以及技术。本文综述了移动机器人定位相关技术,总结了七种定位系统:1.里程法;2.惯性导航;3.磁罗盘;4.主动引导; 5.全球定位系统; 6.地标式导航和 7.模型匹配。讨论了各自的特点,并给出了现有技术的例子。 移动机器人导航技术正在蓬勃发展,正在开发更多的系统和概念。因为这个原因,本文给出的各种例子只代表各自的种类,不表示作者的倾向。在文献上可以发现许多巧妙的方法,只是限于篇幅,本文不能引用。 1。介绍 摘要概述了该技术在传感器、系统、方法和技术的目标,就是在一个移动机器人的工作环境中被找到。在测量文献中讨论这个问题,很明显,不同方法的基准比较是困难的,因为缺乏公认的测试标准和规的比较。使用的研究平台大不相同,用于不同的方法的关键假设也大不相同。再进一步,困难源自事实上不同的系统是处在其发展的不同阶段。例如,一个系统已经可以商业化;而另一个系统,也许有更好的性能,却只能实验室条件下作有限的测试。正是由于这些原因,我们一般避免比较甚至判断不同系统或技术的表现。在这篇文章里,我们也不考虑自动引导车(AGV)。AGV使用磁带、地下的引导线、或地面上的彩色条纹在作引导。这些小车不能自由设计路径,不能改变自己的道路,那样它们无法响应外部传感器输入(如避障)。然而,感兴趣的读者可能会在[Everett, 1995]找到AGV引导技术调查。 也许最重要的移动机器人定位文献的阅读结果,正是到目前为止,并没有真正完美的解决问题的方案。许多局部的解决办法大致分为两组:绝对的和相对的位置测量。因为缺乏一种完善的方法,开发移动机器人通常结合两种方法,从每个小组选一个方法。这些方法可以进一步分为以下七类: I:相对位置的测量(也称为Dead-reckoning) 1。里程法 2。惯性导航 II:绝对位置测量(基于参考的系统) 3。磁罗盘 4。主动发射引导 5。全球定位系统 6。地标式导航 7。模型匹配
移动机器人视觉导航
移动机器人视觉导航。 0504311 19 刘天庆一、引言 智能自主移动机器人系统能够通过传感器感知外界环境和自身状态,实现在有障碍物环境中面向目标的自主运动,从而完成一定作业功能。其本身能够认识工作环境和工作对象,能够根据人给予的指令和“自身”认识外界来独立地工作,能够利用操作机构和移动机构完成复杂的操作任务。因此,要使智能移动机器人具有特定智能,其首先就须具有多种感知功能,进而进行复杂的逻辑推理、规划和决策,在作业环境中自主行动。机器人在行走过程中通常会碰到并且要解决如下三个问题:(1)我(机器人)现在何处?(2)我要往何处走?(3)我要如何到达该处?其中第一个问题是其导航系统中的定位及其跟踪问题,第二、三个是导航系统的路径规划问题。移动机器人导航与定位技术的任务就是解决上面的三个问题。移动机器人通过传感器感知环境和自身状态,进而实现在有障碍物的环境中面向目标自主运动,这就是通常所说的智能自主移动机器人的导航技术。而定位则是确定移动机器人在工作环境中相对于全局坐标的位置及其本身的姿态,是移动机器人导航的基本环节。 目前,应用于自主移动机器人的导航定位技术有很多,归纳起来主要有:安装CCD 摄像头的视觉导航定位、光反射导航定位、全球定位系统GPS(Global Positioning System)、声音导航定位以及电磁导航定位等。下面分别对这几种方法进行简单介绍和分析。 1、视觉导航定位 在视觉导航定位系统中,目前国内外应用较多的是基于局部视觉的在机器人中安装车载摄像机的导航方式。在这种导航方式中,控制设备和传感装置装载在机器人车体上,图像识别、路径规划等高层决策都由车载控制计算机完成。视觉导航定位系统主要包括:摄像机(或CCD 图像传感器)、视频信号数字化设备、基于DSP 的快速信号处理器、计算机及其外设等。现在有很多机器人系统采用CCD 图像传感器,其基本元件是一行硅成像元素,在一个衬底上配置光敏元件和电荷转移器件,通过电荷的依次转移,将多个象素的视频信号分时、顺序地取出来,如面阵CCD传感器采集的图像的分辨率可以从32×32 到1024×1024 像素等。视觉导航定位系统的工作原理简单说来就是对机器人周边的环境进行光学处理,先用摄像头进行图像信息采集,将采集的信息进行压缩,然后将它反馈到一个由神经网络和统计学方法构成的学习子系统,再由学习子系统将采集到的图像信息和机器人的实际位置联系起来,完成机器人的自主导航定位功能。 视觉导航定位中,图像处理计算量大,计算机实时处理的速度要达到576MOPS~5.76BOPS,这样的运算速度在一般计算机上难以实现,因此实时性差这一瓶颈问题有待解决; 另外,对于要求在黑暗环境中作业的机器人来说,这种导航定位方式因为受光线条件限制也不太适应。 当今国内外广泛研制的竞赛足球机器人通常都采用上面所说的视觉导航定位方式,在机器人小车子系统中安装摄像头,配置图像采集板等硬件设备和图像处理软件等组成机器人视觉系统。通过这个视觉系统,足球机器人就可以实现对球的监测,机器人自身的定位,作出相应动作和预测球的走向等功能
外文翻译--轮式移动机器人的导航与控制
毕业设计(论文)外文 资料翻译 系部:机械工程 专业:机械工程及自动化 姓名: 学号: 外文出处:Control and (用外文写) Robotics(CRB) Technical Report 附件:1.外文资料翻译译文;2.外文原文。
附件1:外文资料翻译译文 轮式移动机器人的导航与控制 摘要:本文研究了把几种具有导航功能的方法运用于不同的控制器开发,以实现在一个已知障碍物前面控制一个开环系统(例如:轮式移动机器人)执行任务。第一种方法是基于三维坐标路径规划的控制方法。具有导航功能的控制器在自由配置的空间中生成一条从初始位置到目标位置的路径。位移控制器控制移动机器人沿设置的路径运动并停止在目标位置。第二种方法是基于二维坐标路径规划的控制方法。在二维平面坐标系中建立导航函数,基于这种导航函数设计的微控制器是渐进收敛控制系统。仿真结果被用来说明第二种控制方法的性能。 1介绍
很多研究者已经提出不同算法以解决在障碍物杂乱的环境下机器人的运动控制问题。对与建立无碰撞路径和传统的路径规划算法,参考文献[19]的第一章第九部分中提供了的全面总结。从Khatib在参考文献[13]的开创性工作以来,很显然控制机器人在已知障碍物下执行任务的主流方法之一依然是构建和应用位函数。总之,位函数能够提供机器人工作空间、障碍位置和目标的位场。在参考文献[19]中提供对于位函数的全面研究。应用位函数的一个问题是局部极小化的情况可能发生以至于机器人无法到达目标位置。不少研究人士提出了解决局部极小化错误的方法(例如参考文献[2], [3],[5], [14], [25])。其中Koditschek 在参考文献[16]中提供了一种解决局部极小化错误的方法,那是通过基于一种特殊的位函数的完整系统构建导航函数,此函数有精确的数学结构,它能够保证存在唯一最小值。 在针对标准的 (完整的)系统的先前的结果的影响下, 面对更多的具有挑战性的非完整系统,越来越多的研究集中于位函数方法的发展(例如.,机器人)。例如, Laumond 等人 [18] 用几何路线策划器构建了一条忽略机器人非完全约束 的无障碍路线, 然后把几何线路分成更短的线路来满足非完全限制,然后应用最佳路线来减少路程。在 [10] 和 [11]中, Guldner 等人使用间断变化的模式控制器迫使机器人的位置沿着位函数的负倾斜度变动,及其定位与负倾斜度一致。在[1], [15], 和 [21]中,持续的位场控制器也保证了位函数的负倾斜度的位置追踪和定位追踪。在[9]中,面对目标因为周边的障碍物而不能达到这一情况时,Ge和Cui 最近提出一种新的排斥的位函数的方法来解决这一问题。在 [23]和[24]中, Tanner 等人采用[22] 中提出的导航函数研究和偶极位场概念为一个 不完全移动操纵器建立导航函数控制器。特别是, [23] 和 [24] 中的结果使用了间断控制器来追踪导航函数的负倾斜度, 在此过程中,一个不平坦的偶极位场使得机器人按照预想的定位拐入目标位置。 本文介绍了为不完全系统达到导航目标的两种不同的方法。在第一个方法中, 产生了一个三维空间似导航函数的预想的轨道,它接近于机器人自由配置空间上的唯一最小值的目标位置和定位。然后利用连续控制结构使机器人沿着这条路线走,在目标位置和定位点停下(例如,控制器解决一体化的追踪和调节问题)。这种方法特别的地方是机器人根据预想的定位到达目标位置,而不需要像许多先前
一种基于单目视觉的移动机器人室内导航方法
第32卷第4期2006年7月 光学技术 OPTICAL TECHN IQU E Vol.32No.4 J uly 2006 文章编号:1002-1582(2006)04-0591-03 一种基于单目视觉的移动机器人室内导航方法Ξ 付梦印,谭国悦,王美玲 (北京理工大学信息科学技术学院自动控制系,北京 100081) 摘 要:针对室内导航的环境特点,提出了一种简单快速的、以踢脚线为参考目标的移动机器人室内导航方法。该方法从图像中提取踢脚线作为参考直线,通过两条直线在图像中的成像特征,提取角度和横向偏离距离作为移动机器人的状态控制输入,从而实现移动机器人的横向运动控制。该方法无需进行摄像机的外部参数标定,大大简化了计算过程,提高了视觉导航的实时性。 关键词:视觉导航;直线提取;Hough变换;移动机器人;踢脚线 中图分类号:TP242.6+2;TP391 文献标识码:A An indoor navigation algorithm for mobile robot based on monocular vision FU Meng-yin,T AN G uo-yue,WANG Mei-ling (Department of Automatic Control,School of Information and Science Technolo gy, Beijing Institute of Technology,Beijing 100081,China) Abstract:Considered the features of indoor environment,a sim ple fast indoor navigation algorithm for vision-guide mobile robot was presented,which used skirting lines as the reference objects to locate the mobile robot.This algorithm detected skirt2 ing lines using monocular images and analyzed the lines’parameters to provide angle and distance of the robot as in puts of robot control.Without calibrating camera parameters,this algorithm greatly reduces computation time and improves the real-time a2 bility of vision navigation. K ey w ords:vision navigation;line detection;Hough transform;mobile robot;skirt line 1 引 言 近年来,机器视觉因其含有丰富的环境信息而受到普遍的关注。随着视觉传感器价格的不断下降,视觉导航已成为导航领域研究的热点。在室外进行视觉导航时,采用视觉传感器可获取车道信息,通过摄像机的标定来实现坐标转换,通过确定车辆当前的状态来实现导航。绝大部分智能车辆都是应用视觉来完成车道检测的[1,2],例如意大利的AR2 GO[3]项目就是通过使用逆投射投影的方法[4]来确定车辆状态的,并获得了良好的实验效果。在室内进行视觉导航时,利用视觉提取室内环境特征,例如一些预先设置的引导标志就是通过图像处理进行识别并理解这些标志来完成导航任务的[5,6]。这些都需要在图像中进行大量的搜索运算来提取标志,并通过一系列的图像理解算法来理解标志的信息,因而计算量很大。当然也可以通过视觉计算室内环境,例如通过走廊中的角点特征来获取状态信息[7],以此减少图像搜索时的计算量。但这些角点信息易受移动机器人运动的影响,会模糊角点信息,为了提高计算精度需要通过光流法对背景信息进行运动补偿,计算复杂,实时性不理想。 当移动机器人在实验室走廊环境下进行导航控制时,需要视觉传感器为其提供偏航角和横向偏离距离这两个参数。通过对单目视觉图像进行处理来获取这两个参数,完成移动机器人的横向运动控制。 2 摄像机成像模型与视觉系统 2.1 摄像机成像模型 使用视觉传感器首先要考虑的是其成像模型,它是指三维空间中场景到图像平面的投影关系,不同的视觉传感器有不同的成像模型。本文采用高分辨率CCD摄像机作为视觉传感器,其成像模型为针孔模型,空间中任意一点P在图像上的成像位置可以用针孔模型近似表示。如图1所示,P点投影位置为p,它是光心O同P点的连线O P与图像平面的交点,这种关系叫投射投影。图中标出的坐标系定义如下[8]: (1)图像坐标系I(u,v)是以图像平面的左上角为坐标原点所定义的直角坐标系,以像素为单位表示图像中点的位置。 (2)像平面坐标(x,y)指的是CCD成像靶面 195 Ξ收稿日期:2005-07-12 E-m ail:guoyuetan@https://www.wendangku.net/doc/2f2104062.html, 基金项目:国家自然科学基金资助项目(60453001) 作者简介:付梦印(1964-),男,北京理工大学信息科学技术学院自动控制系教授,博士,主要从事导航制导、控制组合导航及智能导航技术的研究。
基于视觉导航的轮式移动机器人设计方案
基于视觉导航的轮式移动机器人设计方案第一章移动机器人 §1.1移动机器人的研究历史 机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器)。1962年,美国Unimation公司的第一台机器人Unimate。在美国通用汽车公司(GM)投入使用,标志着第一代机器人的诞生。 智能移动机器人更加强调了机器人具有的移动能力,从而面临比固定式机器人更为复杂的不确定性环境,也增加了智能系统的设计复杂度。1968年到1972年间,美国斯坦福国际研究所(Stanford Research Institute, SRI)研制了移动式机器人Shaky,这是首台采用了人工智能学的移动机器人。Shaky具备一定人工智能,能够自主进行感知、环境建模、行为规划并执行任务(如寻找木箱并将其推到指定目的位置)。它装备了电视摄像机、三角法测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制。当时计算机的体积庞大,但运算速度缓慢,导致Shaky往往需要数小时的时间来分析环境并规划行动路径。 1970年前联月球17号探测器把世界第一个无人驾驶的月球车送七月球,月球车行驶0.5公里,考察了8万平方米的月面。后来的月球车行驶37公里,向地球发回88幅月面全景图。在同一时代,美国喷气推进实验室也研制了月球车(Lunar rover),应用于行星探测的研究。采用了摄像机,激光测距仪以及触觉传感器。机器人能够把环境区分为可通行、不可通行以及未知等类型区域。 1973年到1979年,斯坦福大学人工智能实验室研制了CART移动机器人,CART可以自主地在办公室环境运行。CART每移动1米,就停下来通过摄像机的图片对环境进行分析,规划下一步的运行路径。由于当时计算机性能的限制,CART每一次规划都需要耗时约15分钟。CMU Rover由卡耐基梅隆大学机
移动机器人控制系统的发展方向
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
工业机器人视觉系统
工业机器人及机器人视觉系统 人类想要实现一系列的基本活动,如生活、工作、学习就必须依靠自身的器官,除脑以外,最重要的就是我们的眼睛了,(工业)机器人也不例外,要完成正常的生产任务,没有一套完善的,先进的视觉系统是很难想象的。 机器视觉系统就是利用机器代替人眼来作各种测量和判断。它是计算科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。图像处理和模式识别等技术的快速发展,也大大地推动了机器视觉的发展。 机器视觉系统的应用 在生产线上,人来做此类测量和判断会因疲劳、个人之间的差异等产生误差和错误,但是机器却会不知疲倦地、稳定地进行下去。一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统。对于每一个应用,我们都需要考虑系统的运行速度和图像的
处理速度、使用彩色还是黑白摄像机、检测目标的尺寸还是检测目标有无缺陷、视场需要多大、分辨率需要多高、对比度需要多大等。从功能上来看,典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分 工作过程 ?一个完整的机器视觉系统的主要工作过程如下: ?1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。 ?2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。 ?3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。 ?4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。
移动机器人的自主导航控制
移动机器人的自主导航控制 一、研究的背景 移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、计算机技术、机械工程、电子工程、自动化控制工程以及人工智能等多学科的研究成果,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、国防、医疗、服务等行业中得到广泛的应用,而且在排雷、搜捕、救援、辐射和空间领域等有害与危险场合都得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 在自主式移动机器人相关技术的研究中,导航技术是其研究核心,同时也是移动机器人实现智能化及完全自主的关键技术。导航是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动。导航主要解决以下三方面的问题:(l)通过移动机器人的传感器系统获取环境信息;(2)用一定的算法对所获信息进行处理并构建环境地图;(3)根据地图实现移动机器人的路径规划及运动控制。 二、相关技术 移动机器人定位是指确定机器人在工作环境中相对于全局坐标的位置,是移动机器人导航的基本环节。定位方法根据机器人工作环境的复杂性、配备传感器种类和数量等方面的不同而采用多种方法。主要方法有惯性定位、标记定位、GPS定位、基于地图的定位等,它们都不同程度地适用于各种不同的环境,括室内和室外环境,结构化环境与非结构化环境。 惯性定位是在移动机器人的车轮上装有光电编码器,通过对车轮转动的记录来粗略地确定移动机器人位置。该方法虽然简单,但是由于车轮与地面存在打滑现象,生的累积误差随路径的增加而增大,导致定位误差的逐渐累积,从而引起更大的差。 标记定位法是在移动机器人工作的环境里人为地设置一些坐标已知的标记,超声波发射器、激光反射板等,通过机器人的传感器系统对标记的探测来确定机器人在全局地图中的位置坐标。三角测量法是标记定位中常用的方法,机器人在同一点探测到三个陆标,并通过三角几何运算,由此可确定机器人在工作环境中的坐标。标记定位是移动机器人定位中普遍采用的方法,其可获得较高的定位精度且计量小,但是在实际应用中需要对环境作一些改造,添加相应的标记,不太符合真正意义的自主导航。 GPS定位是利用环绕地球的24颗卫星,准确计算使用者所在位置的庞大卫星网 定位系统。GPS定位技术应用已经非常广泛,除了最初的军事领域外,在民用方面也得到了广泛的应用,但是因为在移动导航中,移动GPS接收机定位精度受到卫 星信号状况和道路环境的影响,同时还受到时钟误差、传播误差、接收机噪声
基于路径识别的移动机器人视觉导航
第9卷 第7期2004年7月 中国图象图形学报Journal of Image and G raphics V ol.9,N o.7July 2004 基金项目:国家“863”计划资助项目(编号:2001AA422200)收稿日期:2004201213;改回日期:2004204206 基于路径识别的移动机器人视觉导航 张海波 原 魁 周庆瑞 (中国科学院自动化研究所高技术创新中心,北京 100080) 摘 要 跟随路径导引是自主式移动机器人广泛采用的一种导航方式,其中视觉导航具有其他传感器导航方式所无法比拟的优点,是移动机器人智能导航的主要发展方向。为了提高移动机器人视觉导航的实时性和准确性,提出了一个基于路径识别的视觉导航系统,其基本思想是首先用基于变分辨率的采样二值化和形态学去噪方法从原始场景图像中提取出目标支持点集,然后用一种改进的哈夫变化检测出场景中的路径,最后由路径跟踪模块分直行和转弯两种情况进行导航计算。实验结果表明,该视觉导航系统具有较好的实时性和准确性。关键词 自主式移动机器人 视觉导航 路径识别 中图法分类号:TP242.62 文献标识码:A 文章编号:100628961(2004)0720853205 Visual N avigation of a Mobile R obot B ased on P ath R ecognition ZH ANG Hai 2bo ,Y UAN K ui ,ZH OU Qing 2rui (Hi 2tech Innovation Centre ,Institute o f Automation ,Chinese Academy o f Sciences ,Beijing 100080) Abctract G uidance using path following is widely applied in the field of autonom ous m obile robots.C om pared with the navigation system without vision ,visual navigation has obvious advantages as rich in formation ,low cost ,quietness ,innocuity ,etc.This pa 2per describes a navigation system which uses the visual in formation provided by guide lines and color signs.In our approach ,the visual navigation is com posed of three main m odules :image 2preprocessing ,path 2recognition and path 2tracking.First ,image 2pre 2processing m odule formulates color m odels of all kinds of objects ,and establishes each object ’s support through adaptive subsam 2pling 2based binarization and mathematical m orphology.Second ,path 2recognition m odule detects the guide lines through an im 2proved H ough trans form alg orithm ,and the detected results including guide lines and color signs integrate the path in formation.Fi 2nally ,calling different functions according to the m ovement of straight 2g oing or turning ,path 2tracking m odule provides required in 2put parameters to m otor controller and steering controller.The experimental results dem onstrate the effectiveness and the robustness of our approach. K eyw ords com puter perception ,autonom ous m obile robot ,visual navigation ,path recognition 1 引 言 导航技术是移动机器人的一项核心技术,其难 度远远超出人们最初的设想,其主要原因有:一是环境的动态变化和不可预测;二是机器人感知手段的不完备,即很多情况下传感器给出的数据是不完全、不连续、不可靠的[1]。这些原因使得机器人系统在复杂度、成本和可靠性方面很难满足要求。 目前广泛应用的一种导航方式是“跟随路径导 引”,即机器人通过对能敏感到的某些外部的连续路 径参照线作出相应反应来进行导航[2]。这种方法和传统的“硬”自动化相比大大增加了系统的灵活性,其具有代表性的系统有:C ontrol Engineering 公司安装的导线引导系统,它是通过检测埋在地下的引导导线来控制行进方向,其线路分岔则通过在导线上加载不同频率的电流来实现[3];Egemin Automation 公司生产的Mailm obile 机器人则安装有主动式紫外光源,并通过3个光电探头来跟随由受激化学物质构成的发光引导路径[4];Macome 公司为自动驾驶车
轮式移动机器人(WMR)设计毕业设计
哈尔滨工业大学华德应用技术学院毕业设计(论文) 摘要 本文首先对机器人的国内为发展现状做了介绍,同时根据设计要求对机器人的整体方案进行了分析,包括几何尺寸、驱动芯片的选择和程序的编制。然后从机器人性能要求的角度出发,分别对机器人的运动方式、模型结构和车体成型方式做了比较,最终确定了非完整约束轮驱四轮式移动结构模型——后轮同轴驱动,前轮转向的轮型机器人。 文章对移动机器人硬件结构做了详细的可行性分析及设计,并且做了相应的计算、校核,主要包括:驱动轮电机和转向轮电机的选择及其驱动电路的设计;齿轮的设计计算和校核;转向机构设计和车体的一些机械结构设计等。并且针对本设计所研究的机器人,设计了驱动模块。本设计中,采用增量式光电编码器测量移动机器人后轮的实时转速,进而通过特定算法得到实时电机驱动模块的PWM控制量,实现运动机器人运动的闭环控制。 最后,本文对所作研究和主要工作进行了总结,并将设计的轮型机器人的结构进行联合调试。实验结果表明,该系统性能稳定、可靠,可控制性高,安全性高,达到了本设计的设计要求。 关键词:轮式移动机器人(WMR);硬件;非完整约束;驱动模块 -I-
哈尔滨工业大学华德应用技术学院毕业设计(论文) Abstract In this paper the development of robot profiles and classification made a presentation According to the design requirements of the robot's overall program for the analysis, including geometry, rapid movement, anti-jamming, operability and maintainability. Then robot performance requirements from the perspective, the robot's movement, Model structure and body molding form of a comparison, finalization of non-refoulement integrity constraint round four mobile model -- coaxial rear-wheel drive nose wheel steering the robot vehicle Based on a mobile robot hardware architecture done a detailed feasibility analysis and design, and the corresponding calculation, checking, including driving wheel motor and steering wheel and the choice of motor drive circuit design; Gear design and verification; Selection and battery charging circuit programming; sensing part of the design; before and after the shock absorber systems, and to design the body and some mechanical structure design. It should also study the design of the robot, to discuss the design of the system reliability Finally, we made to research and the main work of summing up and robot design models of the structure of the joint debugging. Experimental results show that the system is stable, reliable, and can be controlled, safe, meeting the requirements of Design Keywords:Wheeled Mobile Robot (WMR);Hardware; Nonholonomic Constraints;Move Module 毕业论文(设计)诚信声明本人声明:所呈交的毕业论文(设计)是在导师指导下进行的研究工作及取得的研究成果,论文中引用他人的文献、数据、图表、资料均已作明确标注,论文中的结论和成果为本人独立完 -II-
机器人视觉系统系统基本组成:CCD、PCI、PC及其外设等
机器人视觉系统系统基本组成:CCD、PCI、PC及其外设等 1.机器人视觉 机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度,这些眼睛亦可称为VO(视觉里程计:单目or立体),维基百科给出的介绍:在机器人和计算机视觉问题中,视觉里程计就是一个通过分析处理相关图像序列来确定机器人的位置和姿态。 当今,由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像镜头(CCD/CMOS)上的图像则是二维的,视觉处理的最终目的就是要从感知到的二维图像中提取有关的三维世界信息。 2.系统基本组成:CCD、PCI、PC及其外设等。 2.1 CCD/CMOS一行硅成像元素,在一个衬底上配置光敏元件和电荷转移器件,通过电荷的依次转移,将多个象素的视频信号分时、顺序地取出来,如面阵CCD传感器采集的图像的分辨率可以从32×32到1024×1024像素等。 2.2视频数字信号处理器图像信号一般是二维信号,一幅图像通常由512×512个像素组成(当然有时也有256×256,或者1024×1024个像素),每个像素有256级灰度,或者是3×8bit,红黄兰16M种颜色,一幅图像就有256KB或者768KB(对于彩色)个数据。为了完成视觉处理的传感、预处理、分割、描述、识别和解释,上述前几项主要完成的数学运算可归纳为: (1)点处理常用于对比度增强、密度非线性较正、阈值处理、伪彩色处理等。每个像素的输入数据经过一定关系映射成像素的输出数据,例如对数变换可实现暗区对比度扩张。(2)二维卷积的运算常用于图像平滑、尖锐化、轮廓增强、空间滤波、标准模板匹配计算等。
自主移动机器人智能导航研究进展
自主移动机器人智能导航研究进展 冯建农 柳 明 吴 捷 (华南理工大学计算机系 广州 510641)摘 要 本文对当前在自主移动机器人智能导航研究中已被采用并取得成果的研究方法进行了 综述,并根据已取得的成果预测了移动机器人智能导航研究的发展趋势,指出视觉导航和传感器融合将是移动机器人智能导航的主要发展方向. 关键词 移动机器人,智能系统,导航 1 引言 国际机器人研究在经过了80年代的低潮之后,呈现出复苏和继续发展的形势;我国的机器人研究在国家“七五”、“八五”及“863”计划的推动下也取得了很大进展.与70年代的机器人浪潮相比,现在的机器人研究有两个特点:一是对机器人智能的定位有了更加符合实际的标准,也就是不要求机器人具有象人类一样的高智能,而只是要求机器人在某种程度上具有自主处理问题的能力;另一个特点是许多新技术及控制方法(神经网络、传感器融合、虚拟现实、高速度的并行处理机等)被引入到机器人研究中.研究重点的转变使机器人研究走向了健康而平稳的发展道路,并不断取得新的研究成果. 智能自主移动机器人能够按照存储在其内部的地图信息,或根据外部环境所提供的一些引导信号(即通过对环境的实时探测所获得的信息)规划出一条路径,并能够沿着该路径在没有人工干预的情况下,移动到预定目标点.智能自主移动机器人对它的研究正在成为一个重要的研究热点. 由于机器人应用从制造业向非制造业的扩展,以及自主移动智能机器人在诸如野外作业、深海探测、以及一些人类本身所不能进入的有毒或高温环境的作业中,有着极其广泛的应用前景,因此近年来机器人研究在多方面都已取得了很大的进展.研究的成果必将成为各行各业提高生产力的强有力工具. 2 移动机器人导航分类 移动机器人有多种导航方式,根据环境信息的完整程度、导航指示信号类型、导航地域等因素的不同,可以分为基于地图导航、基于陆标导航、基于视觉导航、基于感知器导航等. 基于地图的导航是在机器人内部存有关于环境的完整信息,并在预先规划出的一条全局路线的基础上,采用路径跟踪和避障技术,实现机器人导航;当机器人对周围环境并不完全了解时,则可采用基于陆标的导航策略,也就是将环境中具有明显特征的景物存储在机器人内部,机器人通过对陆标的探测来确定自己的位置,并将全局路线分解成陆标与陆标之间的片段,再通过一连串的陆标探测和陆标制导来完成导航任务;在环境信息完全未知的情况下,可1997年11月机器人 R OBOT N ov.,1997 1996-11-04收稿
移动机器人视觉导航系统研究
北京交通大学 硕士学位论文 移动机器人视觉导航系统研究姓名:王红波 申请学位级别:硕士专业:信号与信息处理指导教师:阮秋琦 20080601 中文摘要 中文摘要 摘要:基于视觉的移动机器人导航是近年发展起来的一种先进导航技术。与其它的非视觉传感器导航相比,它具有信息丰富、探测范围宽、目标信息完整等优点。本文结合实际应用,提出了一个完整的移动机器人视觉导航系统解决方案。研究内容主要包括四个部分:摄像机标定、目标识别、单目测距和运动控制。分别阐述如下: 第一,摄像机标定,基于张正友的平面标定算法对摄像头进行精确标定,针对摄像头的自动变焦特性,提出了一个新的离线离散标定策略,并获得多个状态下的摄像头内外参数。 第二,目标识别,传统分割方法存在多分割问题,影响到目标物提取的精度, 这罩提出一个改进了的基于HSI模型的彩色图像分割算法,在多通道阈值分割的基础上,融入了连通区域标记和形念学开闭运算。 第三,单目测距,基于摄影测量学和立体几何理论,建立了单目视觉测距模型,并推导了基于地平面约束的单目测距算法。针对多种误差因素,在测距算法中加入了误差校币,使移动机器人能够更加准确地定位目标物体。 第四,运动控制,控制摄像机云台实现日标物搜索,调整移动机器人位姿和对夹持器的动作控制。
实验结果表明:即使在恶劣光照条件下,提出的Hs工分割算法能够对向光、背光、近处、远处物体实现快速有效提取;提出的单目测距模型和算法能够对目标物体进行精确的测距;当把这些算法集成到实验平台上时,能够快速实现移动机器人的导航控制,并成功完成物体抓取操作。 关键词:摄像机标定、彩色目标识别、单目视觉测距、移动机器人 分类号:TP 391.41 ABSTRACI' ABSTRACT ABS。I’RAC’1.. In recent years,vision attracts a lot of attention for navigating a mobile robot in dynamic https://www.wendangku.net/doc/2f2104062.html,pared with other sensing systems,visual navigation is excellent and effective.With a visual sensing system,wider view of field,rich and intensive data Can be obtained for a mobile robot moving in a changing environment.In this study,a visual navigation scheme is proposed for a mobile robot to realize object collection,and it comprises of camera calibration,object recognition,monocular measurement and motion control,as stated in the following. Firstly,the technique of camera calibration is presented on the basis of Zhang’S algorithm.Since a PTZ calTlera is used here,it is controlled to move up and down,from left to right,to extend the view of field.Therefore,calibration in different positions is needed,and a new discrete method is proposed here. Secondly,a