BQS2-MA860H步进伺驱动器使用说明书

BQS2-MA860H型步进伺服驱动器
使用说明书
1、概述
本公司是长期从事机电一体化微电脑控制和步进电动机驱动器等产品研制和生产的专业公司。BQS2-MA860H型步进伺服驱动器是本公司在BQS2-860Ma的基础上精心研制的升级产品。
BQS2-MA860H和同类产品相比具有多细分、高转矩、高可靠、低谐振、低噪音、运行平稳、控制简单、维护方便等特点。适合驱动中小型的驱动电压和电流适宜的两相或四相混合式步进电机。可广泛应用于雕刻机、打标机、贴标机、绣花机、花样机、切字机、焊接机、切割机、绘图仪、微型机床、机器人等各种小型精密自动化设备。深受广大用户的青睐。
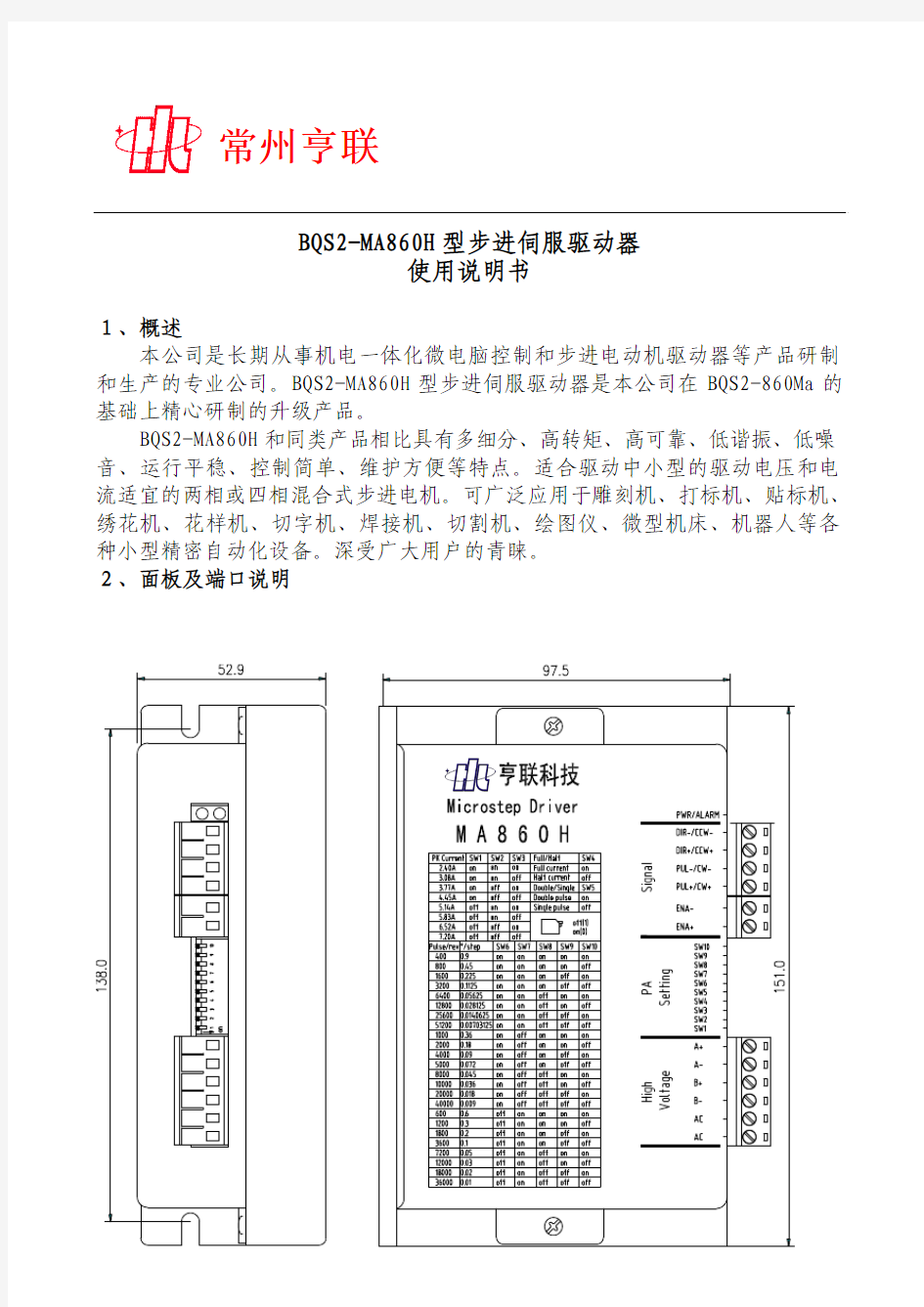
2、面板及端口说明
2.1 指示灯:(PWR)电源指示灯(绿色)
(ALARM)故障指示灯(红色)
2.2 输入信号接口:DIR-/CCW- 方向电平/反转步进脉冲信号负端
DIR+/CCW+ 方向电平/反转步进脉冲信号正端
PUL-/CW- 步进脉冲/正转步进脉冲信号负端
PUL+/CW+ 步进脉冲/正转步进脉冲信号正端
ENA- 使能电平信号负端
ENA+ 使能电平信号正端
2.3 拨位开关设定:第1 2 3 3位设定输出电流值
第4 1位设定锁定电流值
第5 1位设定单、双脉冲
第6 7 8 9 10 4位设定电机步距角
2.4电机输出接口:A+、A-、B+、B- 电机信号接出端
2.5电源输入接口:AC80V 隔离供电接入端
3、主要性能
3.1供电电源:市电经隔离变压器降压提供AC24~80V、50~60Hz,功率不小于120W。
3.2驱动电压:DC32~110V。
3.3驱动电流:八种电流设3位拨位开关(峰值电流)选择:
拨位/123电流值适配电机
000 2.40A
001 3.08A
010 3.77A
011 4.45A
100 5.14A
101 5.83A
110 6.52A
1117.20A
3.4半流或满流锁定设1位拨位开关选择:
拨位/4锁定电流
0满流
1半流
3.5单、双脉冲控制方式设1位拨位开关选择:
拨位/5脉冲方式
0双脉冲
1单脉冲
3.6二十四种细分设5位拨位开关选择:
拨位/678910 步数/转步距角
000004000.9°
000018000.45°
0001016000.225°
0001132000.1125°
0010064000.05625°
00101128000.028125°
00110256000.0140625°
00111512000.00703125°
0100010000.36°
0100120000.18°
0101040000.09°
0101150000.072°
0110080000.045°
01101100000.036°
01110200000.018°
01111400000.009°
100006000.6°
1000112000.3°
1001018000.2°
1001136000.1°
1010072000.05°
10101120000.03°
10110180000.02°
10111360000.01°
3.7过流保护:实时检测到过流信号时,驱动器软硬件均保护。3.8外形尺寸:L*W*H=151*52.9*97.5
3.9安装尺寸:138(2-M4)
4、接口信号
4.1输入信号(共阳方式为例,浮空时均默认为“1”状态)
4.1.1步进脉冲信号PUL :控制电机运行的启动、停止、速度和长度;f ≤200KHz ,tw ≥5uS 。双脉冲控制方式时为CW 正转步进脉冲信号。
4.1.2方向电平信号DIR :控制运行的方向,DIR =1为(顺时针)正转,DIR =0为(逆时针)反转。双脉冲控制方式时为CCW 反转步进脉冲信号。
切换方向时间间隔要求≥10ms 。
4.1.3使能电平信号ENA :使能控制,ENA =1为工作状态,ENA =0为脱机状态即各相均不通电处自由状态。
4.2三路输入信号的内部接口电路相同,常用的连接方式为: 4.2.1共阳方式:把PUL+、DIR+和ENA+接在一起作为共阳端接控制系统的+5V , 脉冲信号接入PUL-端,方向信号接入DIR-端,使能信号接入ENA-端。 4.2.2共阴方式:把PUL-、DIR-和ENA-接在一起作为共阴端接控制系统的GND ,脉冲信号接入PUL+端,方向信号接入DIR+端,使能信号接入ENA+端。 4.2.3差动方式:直接连接。
4.2.4驱动器输入信号最常用的为TTL 电平,以5V电平共阳方式为例,要求:
高电平≥3.5V (包含干扰在内,电流≤0.3mA);
低电平≤1.0V (包含干扰在内,9.0mA≥电流≥4.0mA)。 不管接口以怎样的方式连接,信号最终要转化为光耦器件的输入电流以达到信号可靠传输的目的(参考上图),如果信号源电源电压大于5V时须在外部另加限流电阻R,以确保驱动器输入光耦高电平时可靠截止,低电平时有足4.0~9.0mA 的驱动电流,参见下图和下表。
ENA-PUL+/CW+
PUL-/CW-DIR+/CCW+DIR-/C CW-
ENA+驱动器输入信号内部接口示意图
驱动器外部
4.3输出信号
4.3.1功率输出信号A+、A-、B+、B-
驱动器和电机间对应端连接(拧紧),驱动电流为二相正弦电流。各厂家表法不尽相同(以电机资料为准),现以常州富兴机电的产品为例说明如下:BQS2-MA860H A+ A- B+ B-
60STH 系列蓝(蓝白)红(红白)绿(绿白)黑(黑白)86ST 系列黑绿红蓝
86STH 系列红白黑绿
110STH 系列红白黑绿
110BYG 系列 1 2 3 4
130BYG 系列 1 2 3 4
※环境要求:温度:-10oC~40oC;湿度:40~80%;气压:86~106KPa;无腐蚀性、易燃易爆、导电性气体或液体;无金属粉尘。
※安装要求:应安装在通风良好、防护妥善的电柜内,注意留出通风风道。
※接线要求:控制线最好采用屏蔽线且与电机线或电源线等强电分开,特别注意:各线头可靠接入驱动器对应端子!否则会影响电机的正常运行或损坏驱动器(最常见的就是接线端子发热损坏)
TC8642两相步进驱动器说明书
多普康微数控 TC8642 两相混合式步进电机驱动器说明书 北京多普康自动化技术有限公司扫一扫,加关注!掌握最新资讯,最新优惠!了解更多成功案例! 免费热线:4006-033-880 官网:https://www.wendangku.net/doc/283945291.html, 淘宝旗舰店:https://www.wendangku.net/doc/283945291.html,/ 阿里巴巴品牌工业城:https://www.wendangku.net/doc/283945291.html,/
一、概述 TC8642型细分型两相混合式步进电机驱动器,采用直流18~50V供电,适合驱动电压24V~50V,电流小于4.0A外径42~86毫米的两相混合式步进电机。此驱动器采用全数字电流环进行细分控制,电机的转矩波动小,低速运行平稳,振动和噪音低。高速时可输出相对较高的力矩,定位精度高。广泛适用于雕刻机、数控机床、包装机械、传动设备等分辩率要求较高的设备上。 1、主要特点 ●平均电流控制,两相正弦电流驱动输出 ●直流18~50V供电 ●光电隔离信号输入/输出 ●有过压、欠压、过流、相间短路保护功能 ●十六档细分和自动半流功能 ●八档输出相电流设置 ●具备脱机功能 ●启动转速高 ●高速力矩大 2、电气参数 输入电压直流24~50V输入 输入电流小于4安培 输出电流 1.0A~4.2A 功耗功耗:80W;内部保险:6A 温度工作温度-10~45℃;存放温度-40℃~70℃ 湿度不能结露,不能有水珠 气体禁止有可燃气体和导电灰尘 重量200克 二、控制信号接口 图1是驱动器的接线原理图 1、控制信号定义 PLS/CW+:步进脉冲信号输入正端或正向步进脉冲信号输入正端 PLS/CW-:步进脉冲信号输入负端或正向步进脉冲信号输入负端 DIR/CCW+:步进方向信号输入正端或反向步进脉冲信号输入正端 DIR/CCW-:步进方向信号输入负端或反向步进脉冲信号输入负端 ENA+:脱机使能复位信号输入正端
步进电机驱动电路设计
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器) L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可靠,通过按键控制,操作方便,节省成本。 关键词:步进电机,单片机控制,AT89S52,L297,L298目录
L297+L298步进电机驱动控制板说明书
L297+L298步进电机驱动控制板说明书 一、板子跳线器说明:所有跳线都在左边,则由单片机控制。 1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。 2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。 3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。 二、按键说明: 板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能 CW - 反向旋转 HF - 半速旋转 通过按键就可以直接控制电机的正反转、全速/半速和使能。 三、基本功能描述: 通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。 电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。 控制输入接口包括: GND CLK EN CW HF。 EN:高电平停止,低电平使能。 RET:高电平停止,低电平使能。 C/CW:高电平逆时针,低电平顺时针。 H/HD:高电平全速,低电平半速。 CLK:时钟脉冲。 需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。
步进电机控制器--说明书[1].答案
步进电机,伺服电机可编程控制器KH-01使用说明 一、系统特点 ●控制轴数:单轴; ●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ●最高输出频率:40KHz(特别适合控制细分驱动器); ●输出频率分辨率:1Hz; ●编程条数:99条; ●输入点:6个(光电隔离); ●输出点:3个(光电隔离); ●一次连续位移范围:—7999999~7999999; ●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ●升降速曲线:2条(最优化); ●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示; ●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ●手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ●程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ●回零点功能:可双向自动回到零点; ●编程指令:共14条指令; ●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ●电源:AC220V(电源误差不大于±15%)。
一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输出状态指示灯 4、 CP脉冲信号指示灯
5、 CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲————步进脉冲信号 方向————电机转向电平信号 +5V————前两路信号的公共阳端 CP、CW的状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。 4、 (限位A)A操作和(限位B)B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。再例如要求步进电机在两个行程开关之间往复运行n次,等等。在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“(限位A)A操作”和“(限位B)B操作”。以“(限位A)A操作”为例,工作流程为:当程序在运行时,如果“(限位A)A 操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“(限位A)A操作”入口地址所指定的程序处运行程序。 5、输入1和输入2通过开关量输入端。 6、输出1、输出2和输出3通过开关量输出端。 7、+24V、地—输入输出开关量外部电源,本电源为DC24V/0.2A,此电源由控制器内部隔离提供。 8、 ~220V控制器电源输入端。 输入信号和输出信号接口电路: 本控制器的“启动”、“停止”、“(限位A)A操作”、“(限位B)B操作”、“输入1”、“输入2”为输入信号,他们具有相同的输入接口电路。“输出1”、“输出2”、“输出3”称为输出信号。他们具有相同的输出接口电路。输入和输出电路都有光电隔离,以保证控制器的内部没有相互干扰,控制器内部工作电源(+5V)和外部工作电源(+24V)相互独立,并没有联系,这两组电源由控制器内部变压器的两个独立绕组提供。 开关量输入信号输出信号的状态,分别对应面板上的指示灯。对于输入量,输入低电平(开关闭合时)灯亮,反之灯灭;对于输出量,输出0时为低电平,指示灯灭,反之灯亮。 开关量输入电路:
实用的步进电机驱动电路图
实用的步进电机驱动电路(图) 概述 步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A 两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。 图1 步进电机控制系统框图 硬件简介 ● PMM8713原理框图及功能 PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图 在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。 激励方式控制电路用来选择采用何种励磁方式。激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。 ● SI-7300A的结构及功率驱动原理 SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。 步进电机功率驱动级电路可分为电压和电流两种驱动方式。电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
2H42B步进电机驱动器说明书
2H42B 细分步进电机驱动器使用手册 V ersion 2.0 版权所有不得翻印 【使用前请仔细阅读本手册,以免损坏驱动器】 东莞市一能机电技术有限公司 DONGGUAN ICAN-TECH CO.,LTD 地址:东莞市万江区新和工业区瑞联振兴工业园B栋4楼 https://www.wendangku.net/doc/283945291.html,/ Email:tech@https://www.wendangku.net/doc/283945291.html,
2H42B 步进电机驱动器 一、 2H42B 步进电机驱动器产品简介 1.1概述 2H42B 步进电机驱动器是一款高性价比的细分两相步进电机驱动器。最大可提供2.0A 的电流输出。由于采用了双极性恒流斩波控制技术,与市面上同类型步进电机驱动器相比,其对步进电机噪声和发热均有明显改善。适用于尺寸为28,35,39,42等各类2相或4相混合式步进电机,具有体积小,使用简单方便等特点。 1.2特点 ◆低噪声,高速大转矩特性 ◆光电隔离差分信号输入,响应频率最高200K ◆供电电压12VDC-36VDC ◆细分精度1,2,4,8,16,32,64,128, ◆输出电流峰值可达2.0A 倍细分可选 ◆静止时电流自动减半 ◆外形尺寸小(96*60*24mm ) ◆可选择脉冲上升沿或下降沿触发 ◆电流设定方便,八档可选 ◆可驱动4、6、8线二相、四相步进电机 ◆具有过流,过温保护功能 1.3应用领域 适用于各类型自动化设备或仪器,如雕刻机、打标机、切割机、激光照排、绘图仪、数控 机床、机械手,包装机械,纺织机械等,极具性价比和竞争力。 二、 2H42B 步进电机驱动器 电气、机械和环境指标 1 网址:www https://www.wendangku.net/doc/283945291.html, 2.2 2H42B 步进电机驱动器使用环境及参数 图1.安装尺寸图 2.4加强散热方式 1) 2H42B 步进电机驱动器的可靠工作温度通常在60℃以内,电机工作温度为80℃以内; 2) 建议使用时选择自动半流方式 (即电机停止时电流自动减至60% ),以减少电机和驱动器的发热; 3) 安装步进电机驱动器时请采用立式侧面安装,使散热面向易于空气对流的方向,必要时在机箱内靠近驱动器处应安装排气风扇,进行强制散热,从而保证驱动器在可靠工作温度范围内工作。 2 网址: www https://www.wendangku.net/doc/283945291.html,
研控步进电机YKD3422MA细分驱动器说明书
YKD3422MA 数字式细分驱动器 特点木工雕刻机 数控机床 包装设备 纺织设备 水钻设备 激光切割机 YKD3422MA是一款基于高性能DSP控制的三相步进电机驱动器,硬件设计上采用DSP+IPM模块进行高集成度简约化设计,数字式PWM控制方式,软件上采用矢量控制技术及微细分自适应控制技术,即使在低细分条件下也可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大大高于两相和五相混合式步进电机。驱动电压为交流110V-240V,适配电流在4.2A以下的各种型号三相混合式步进电机。此款驱动最适宜控制高电压小电流电机。定位精度最高可达10000步/转.细分设置更改需要断电重启后才生效,运行电流及抱轴电流设定支持不断电在线设置。 电流设定驱动器接线示意图 典型应用概述1. STOP/Im为保持状态(或抱轴状态)输出电流设置电位器,可设置为 正常输出电流的20%-80%(顺时针增大,逆时针减小),支持在线调整。 2. RUN/Im为正常工作输出电流设置开关(详见下表),支持在线调整。 PU DR MF DIP开关设定输入信号波形时序图安装尺寸(单位:mm)◆◆◆◆◆◆◆◆◆◆◆◆ 采用矢量控制及微细分控制技术,在运行平稳性、噪音、震动、发热等方面 较传统驱动器均有较大的提升; 衰减模式及衰减时间自适应控制,开关管运行在最少开关模式,运行时发热 大大降低,电流波形失真度较小; 设有16档等角度恒力矩细分,最高分辨率10000步/转; 最高响应频率可达200Kpps; 加减速曲线配置合适的情况下电机最高空载速度可达50R/S(or 3000RPM); 步进脉冲停止超过100ms时,线圈电流自动减为20%-80%(由STOP/Im设定) 光电隔离信号输入/输出 驱动电流从0.6A/相到4.2A/相分16档可调 单电源输入,电压范围:交流AC110-220V 出错保护:过热保护/过流、电压过低保护 YKD3422MA体积为178x108.5x68(),净重量为:0.93kg 相位记忆功能(注:输入脉冲停止超过5秒后,驱动器自动记忆当时电机相位, 重新上电或MF信号由有效变为无效时,驱动器自动恢复电机相位)。 3mm 注意!信号端DB15塑料壳 需保留45mm的安装空间。
步进电机驱动器说明书
L297 L298步进电机驱动控制板说明书 一、板子跳线器说明: 1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。 2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。 3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。 二、按键说明: 板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能 CW - 反向旋转 HF - 半速旋转 通过按键就可以直接控制电机的正反转、全速/半速和使能。 三、基本功能描述: 通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。 电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。 控制输入接口包括: GND CLK EN CW HF。 需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。 四、接口说明: 1、板子左上方小二接口(JT1) VCC接+5V、GND接电源地,次处为芯片L297和555芯片的工作电压;
步进电机控制驱动电路设计.
实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号:201216020134 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩:
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1kohm 1kohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
图五三相六拍正转 利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。 方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。 图六单,双三拍的电路图 单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
步进电机驱动器说明书
TB6600升级版 两相步进驱动器 使用说明书 [使用前请仔细阅读本手册,以免损坏驱动器]
目录 一、产品简介 (3) 概述 (3) 特点 (3) 二、接口和接线介绍 (3) 信号输入端 (3) 电机绕组连接 (3) 电源电压连接 (4) 状态指示 (4) 接线方式 (4) 接线要求 (5) 三、电流、细分拨码开关设定 (5) 细分设定 (5) 工作(动态)电流设定 (6) 四、机械和环境指标 (6) 使用环境及参数 (6) 机械安装图 (7) 五、电机适配 (7) 电机适配 (7) 电机接线 (8) 供电电压和输出电流的选择 (8) 五、常见问题 (9) 应用中常见问题和处理方法 (9) 六、保修条款 (10)
一、产品简介 ◆概述 TB6600升级版驱动器是一款专业的两相混合式步进电机驱动器,可适配国内外各种品牌,电流在4.0A及以下,外径39,42,57mm的四线,六线,八线两相混合式步进电机。适合各种小中型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。在用户期望低成本、大电流运行的设备中效果特性。 ◆特点 ※信号输入:单端,脉冲/方向 ※细分可选:1/2/4/8/16/32细分 ※输出电流:0.5A-4.0A ※输入电压:9-42VDC ※静止时电流自动减半 ※可驱动4,6,8线两相、四相步进电机 ※光耦隔离信号输入,抗干扰能力强 ※具有过热、过流、欠压锁定、输入电压防反接保护等功能 ※体积小巧,方便安装 ※外部信号3.3-24V通用,无需串联电阻 二、接口和接线介绍 ◆信号输入端 PUL+ PUL-脉冲输入信号。默认脉冲上升沿有效。为了可靠响应脉冲信号,脉冲宽度应大于1.2us。 DIR+ DIR-方向输入信号,高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5us建立。电机的初始运行方向与电机绕组接线有关,互换任一相绕组(如A+、A-交换)可以改变电机初始运行方向。 ENA+ ENA-使能输入信号(脱机信号),用于使能或禁止驱动器输出。使能时,驱动器将切断电机各相的电流使电机处于自由状态,不响应步进脉冲。当不需用此功能时,使能信号端悬空即可。 ◆电机绕组连接 A+,A-电机A相绕组。 B+,B-电机B相绕组。
舞蹈机器人步进电机驱动电路和程序设计
舞蹈机器人步进电机驱动电路和程序设计 摘要:介绍了舞蹈机器人步进电机驱动电路和程序设计。电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机AT89C52作工作脉冲序列信号发生器。程序设计基于中断服务和总线分时复用方式,实时更新各个电机的速度和方向。 关键词:单片机,中断服务,速度累加计数器,归一化速度 在机器人舞蹈时,我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作。电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。整个舞蹈由运动数据所决定的一截截动作无缝连接而成。 1 步进电机简介 步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。本文以四相制为例介绍其内部结构。图1为四相五线制步进电机内部结构示意图。 2 四相五线制步进电机的驱动电路 电路主要由单片机工作外围电路、信号锁存和放大电路组成。我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。
电路原理图(部分)如图2所示。 (1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。该系列单片机上集成8K的ROM,128字节RAM可供使用。 (2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。关于这些芯片的详细介绍可参见它们各自的数据手册。 (3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。
研控步进电机YKA MA说明书
YKA2811MA细分驱动器 特点 ◆ 高性能、低价格、低噪音、平稳性极好 ◆ 设有32档等角度恒力矩细分 ◆ 采用独特的控制电路,有效的降低了噪音,增加了转动平稳性 ◆ 最高反应频率可达200Kpps ◆ 步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电 机过热 ◆ 双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率 ◆ 光电隔离信号输入/输出 ◆ 驱动电流从0.5A/相到8.0A/相连续可调 ◆ 单电源输入,电压范围:AC60-130V ◆ 出错保护: ――过热保护 ――过流、电压过低保护 典型应用 雕刻机中型数控机床包装机 抛光设备恒速应用 简述 YKA2811MA为一款等角度恒力矩细分型驱动器,最高细分数能达到200细分,驱动电压交流60V~130V,适配电流在8A以下、外径86~130mm的各种型号的两相混合式步进电机。 电器规格 说明 最小值 典型值 最大值 供电电压(VAC) 60 100 130 峰值输出电流(A) 0.5 跟用户要求有关 8.0 逻辑输入电流(mA) 15 步进脉冲相应频率(KHz)- - 200 脉冲低电平时间(uS) 2.5 - - 电流设定 1. STOP/Im为保持状态输出电流设置电位器,可设置为正常输出电流的20%~80%(顺时针增大,逆时针 减小) 2. RUN/Im为正常工作输出电流设置开关(详见下表) R-1 0 1 2 3 4 5 6 7 8 9 A B C D E F Im(A) 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.58.0 细分设定 SK 0 1 2 3 4 5 6 7 8 9 A B C D E F 细分数200 100 8064 50 4032252016108 5 4 2 1
步进电机及其驱动电路
第三节步进电动机及其驱动 一、步进电机的特点与种类 1.步进电机的特点 步进电机又称脉冲电机。它是将电脉冲信号转换成机械角位移的执行元件。每当输入一个电脉冲时,转子就转过一个相应的步距角。转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。 步进电动机具有以下特点: ?工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响; ?步进电动机的步距角有误差,转子转过一定步数以后也会出现累积误差,但转子转过一转以后,其累积误差变为“零” ; ?由于可以直接用数字信号控制,与微机接口比较容易; ?控制性能好,在起动、停止、反转时不易“丢步”; ?不需要传感器进行反馈,可以进行开环控制; ?缺点是能量效率较低。 就常用的旋转式步进电动机的转子结构来说,可将其分为以下三种: (1)可变磁阻(VR-Variable Reluctance),也叫反应式步进电动机 (2)永磁(PM-Permanent Magnet)型 (3)混合(HB-Hybrid)型 (1)可变磁阻(VR-Variable Reluctance) 结构原理:该类电动机由定子绕组产生的反应电磁力吸引用软磁钢制成的齿形转子作步进驱动,故又称作反应式步进电动机。其结构原理如图3.5定子1 上嵌有线圈,转子2朝定子与转子之间磁阻最小方向转动,并由此而得名可变磁阻型。
图3.6 可变式阻步进电机 可变磁阻步进电机的特点: 反应式电动机的定子与转子均不含永久磁铁,故无励磁时没有保持力; 需要将气隙作得尽可能小,例如几个微米; 结构简单,运行频率高,可产生中等转矩,步距角小(0.09~9°) 制造材料费用低; 有些数控机床及工业机器人上使用。 (3)混合(HB-Hybrid)型 结构原理 这类电机是PM式和VR式的复合形式。其定子与VR类似,表面制有小齿,转子由永磁铁和铁心构成,同样切有小齿,为了减小步距角可以在结构上增加转子和定子的齿数。其结构如图3.7所示。 混合式步进电机特点: HB兼有PM和VR式步进电机的特点: 步距角可以做得较小(0.9~3.6°); 无励磁时具有保持力; 可以产生较大转矩,应用较广。
步进电机驱动电路设计
如对您有帮助,请购买打赏,谢谢您! 引言 步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有l297和l298组合应用、3977、8435等,这些芯片一般单相驱动电流在2 a左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片tb6560提出了一种步进电机驱动电路的设计方案 1步进电机驱动电路设计 1.1 tb6560简介 tb6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥mosfet驱动;最高耐压40 v,单相输出最大电流3.5 a(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用hzip25封装。tb6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。 1.2步进电机控制信号隔离电路 步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(clk、cw、enable),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对clk、cw信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6n137高速光耦隔离clk、cw,其信号传输速率可达到10 mhz,1片tlp521普通光耦隔离enable信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。 1.3步进电机主电路 如图2所示,步进电机主电路主要包括驱动电路和逻辑控制电路两大部分。 驱动电路电源采用28 v,电压范嗣为4.5~40 v,提高驱动电压可增大电机在高频范围转矩的输出,电压选择要根据使用情况而定。vmb、vma为步进电机驱动电源引脚,应接入瓷片去耦电容和电解电容稳压。out_ap、out_am、out_bp、out_bm 引脚分别为电机2相输出接口,由于内部集成了续流二极管,这4个输出口不用
5相步进马达驱动器使用说明书
T R系列簡易型 5相步進馬達驅動器 使用說明書 泰 ※本公司為促進產品性能的提昇,所進行的產品設計修改,將不個別通知,若有需要更詳細的資料,請洽各地營業所。
目 錄 1.產品規格 (1) 2.驅動器各部位功能說明 (2) 3.電流調整開關使用方法 (5) 4.接線圖 (6) 5.接線例及使用方法 (7) 6.尺寸圖及安裝方法 (9) ※本產品如有操作上或技術上疑問,歡迎上班時間洽詢本公司『技術諮詢專線:0800-450-168』,我們將竭誠為您服務!
1.產品規格 ●規格 驅動器型號 TR515B TR530B 驅動電流 0.36~1.4 A/相 0.75~2.8 A/相 適用馬達規格 0.75A/相 1.4A/相 0.75A/相 1.4A/相 2.8A/相 輸入電源 DC24~36V *1 MIN :1.5A 以上 DC24~36V *1MIN :3.0A 以上DC24~36V *1MIN :1.5A 以上DC24~36V *1 MIN :3.0A 以上 DC24~36V *1MIN :6.0A 以上 激磁方式 全步進(0.72? 4相激磁),半步進 (0.36? 4-5相激磁)〈可切換〉 信號輸出入方式 ●光耦合器(Photo Coupler)輸入介面 ●開集極電路(Open Collector) 輸出介面 CW 脈波輸入 2 pulse 時::正轉輸入,1 pulse 時:脈波輸入 CCW 脈波輸入 2 pulse 時:反轉輸入,1 pulse 時:運轉方向輸入 輸 入 信 號 H.OFF 輸入 激磁解除輸入(Holding Off) 輸 出 信 號 TIMING 輸出 激磁相原點時輸出 全步進時每10個脈波輸出一個信號 半步進時每20個脈波輸出一個信號 功 能 ●自動電流下降(ACD)●自我測試功能(TEST) ●步進角切換 (H/F)●脈波輸入方式切換(1P/2P) 保護功能 ●電源逆接保護:輸入電壓極性接反時自動斷流 ●過電流保護:輸入電流超過額定值時自動斷流 ●過熱保護:當驅動器超過80?C 時自動斷流*2 燈號顯示 電源,TIMING 外形尺寸 90 (L) ×65 (W) ×32 (H)mm 重量 270g 使用環境溫度範圍 0 ? C ~ 40 ? C *1. [a] 瞬間最大電壓為40V,平常使用請勿超過36V,以免造成驅動器損壞。 [b] 請依表格內建議,選用規格足夠的電源供應器。 *2.當過熱保護功能啟動時,電源指示燈會閃爍,馬達不激磁(注意馬達若使用在垂直 性負載時請做適當防護) 。要恢復激磁,必須關閉電源排除過熱原因後再重新啟動電源。
步进电机驱动器-ZD-M57P使用说明书
Indexer接口步进电机驱动器 使用说明书 (57型:ZD-M57P) 版本 说明 Ver1.00 初始
1.产品特点 ☆微型设计,安装便利,可与57步进电机一体化 ☆散热铸铝封闭型外壳 ☆停止运行时自动半流,无锁相噪声 ☆并行接口高速光电隔离,兼容3.3-5V和12-24V逻辑电平☆电流2-4.5A连续可调 ☆ 1/2/4/8/16/32/64/128细分可选 2.产品参数 供电电源 DC11V-DC36V/5A,推荐DC24V Indexer 接口COM 共阳极。拨码开关选择3.3V-5V或者12V-24V 说明:拨码开关HV选择On位置时,COM可当共阴极使用DIR 0V或者Vcom。 电流:8mA@3.3V/8mA@12V/15mA@5V/18mA@24V STP 0V或者Vcom。 电流:8mA@3.3V/8mA@12V/15mA@5V/18mA@24V 频率0-20KHz
EN 0V或者Vcom。 电流:8mA@3.3V/8mA@12V/15mA@5V/18mA@24V Vcom或者悬空,EN使能步进电机;0V步进电机脱机状态输出电机电流峰值4.5A(单相最大),实际使用2-4.5A可调 驱动方式 PWM斩波恒流 驱动细分拨码开关设置选择1、2、4、8、16、32、64、128 绝缘电阻在常温常压下>100MΩ 绝缘强度在常温常压下0.5KV , 1 分钟 保护输入反接、过载、驱动过热、驱动过流 操作温度 -20℃-85℃
3.电气接口 Ref之间电压。 相电流值 = 电压值数值×2 例如:步进电机相电流为4.0A,调节 电位器,是的Ref与GND之 间电压为2.0V
YKA3722MA步进电机驱动器使用说明书
YKA3722MA细分驱动器 ◆高性能、低价格 ◆设有16档等角度恒力矩细分,最高分辨率60000步/转,使运转 平滑,分辨率提高 ◆采用独特的控制电路,有效的降低了噪音,增加了转动平稳性 ◆最高反应频率可达200Kpps ◆步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多 场合的电机过热 ◆双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率 ◆光电隔离信号输入/输出 ◆驱动电流从0.7A/相到7.0A/相分16档可调 ◆可以驱动任何7.0A相电流以下三相混合式步进电机 ◆单电源输入,电压范围:AC100-220V ◆出错保护: ――过热保护 ――过流、电压过低保护 ◆YKA3722MA驱动器体积为80x156x200mm3。 ◆相位记忆功能(注:输入脉冲停止超过5秒后,驱动器自动记忆当时电机相位,重新上电或MF信号 由有效变为无效时,驱动器自动恢复电机相位。) 典型应用 雕刻机、分辨率较高的大、中型数控机床包装机、电脑绣花机、恒速应用 简述 YKA3722MA为一款等角度恒力矩细分型驱动器,驱动电压交流110V~220V,适配电流在7.0A以下、外径86~130mm的各种型号的三相混合式步进电机。该驱动器内部采用类似伺服控制原理的电路,此电路可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大大高于两相和五相混合式步进电机。 定位精度最高可达60000步/转。 电器规格 电流设定 1. STOP/Im为保持状态输出电流设置电位器,可设置为正常输出电流的20%~80%(顺时针增大,逆时针 减小)
细分设定 YKA3722MA驱动器细分设定如下表: DIP开关功能设定 驱动器接线示意图
57MM步进电机资料说明书(玖洋)
57系列二相步进电机 ◆步进电机详细信息 ◆步进电机性能参数 注:1. 以上仅为代表性产品,如需其它非代表性产品可以根据客户需求定制。 2.根据客户不同需求可以定制4线,6线,8线步进电机 3.两相步进电机基本步距角是1.8°,三相步进电机步距角是1.2°。 ◆步进电机安装尺寸(单位:mm)
57 FH系列步进电机标准出轴为光轴,直径6.35mm,直径8mm,伸出轴长度21mm。可按用户要求铣单扁、做双出轴、变更出轴长度;也可按用户要求定制电气参数,例如电流大小;或根据用户使用环境做参数调整,例如供电电压36V要求低速大力矩;还可按用户提供样品仿制步进电机。 ◆步进电机曲线图说明 ◆步进电机接线图说明
注意: ◆电机特性数据和技术数据都是在匹配我公司驱动器驱动YBM86的情况下测得,测试电压为DC28V。 ◆步进电机力矩测试数据与驱动器型号、参数设置、驱动器供电电压密切相关;同规格步进电机因定转子间隙不同,饶线方式不同,其矩频特性也不同。 ◆电机安装前务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度,不同心会导致断轴。 ◆电机与负载连接时,严禁敲击,电机轴与轴承受敲击后可能影响电机性能,甚至损坏。 ◆电机与驱动器连接时,请勿接错相,错相或缺相时电机不能正常运转,可能损伤步进电机驱动器。 ◆无电机接线图时,用万用表测量,电机线两两相通,分别接A+A-、B+B-。无万用表时,挑两根电机线短接,若电机轴旋转阻力增大,则这两根线是一组线圈。电机旋转初始方向与所需方向相反时,把A+A-两线换位即可 57BYGH系列步进电机说明书 步距角:0.9/1.8度 绝缘电阻:500 V DC 100MΩ 绝缘强度:500V AC 1 Minute 温升:65K 环境温度:-10℃~+55℃ 绝缘等级:B 二相混合式步进电机 型号相数电压 (V) 额定电流 (A) 电阻 (Ω) 电感 (mH) 静转矩 (Kg.cm) 定位转矩 (kg.cm) 重量 (Kg) 机身长 (mm) 出轴长 (mm) 接线图 57BYGH101 4 3 1.3 2.3 2.2 4.9 0.3 0.45 45 21 a
步进电机控制及驱动电路的设计
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位:信息工程学院 题目: 步进电机的控制及驱动电路设计 初始条件: 本设计既可以使用集成移位寄存器、驱动器、555定时器和必要的门电路,以及所需电阻、电容、二极管、三极管、开关等元件。本设计也可以使用单片机系统构建步进电机的控制及驱动电路。 自行设计所需电源。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1、课程设计工作量:1周。 2、技术要求: ①设计一个方波发生器提供系统时钟; ②设计一个步进电机的驱动信号发生器,可以实现电机正转/反转控制和转速控制; ③要求驱动器有足够的输出电流以驱动小功率4相步进电机; ④要求可以实现步进电机的单相或双相激励; ⑤确定设计方案,按功能模块的划分选择元、器件和集成电路,设计分电路,阐述基本原理。 ⑥绘制总体电路原理图。 3、查阅至少5篇参考文献。按《武汉理工大学课程设计工作规范》要求撰写设计报告书。全 文用A4纸打印,图纸应符合绘图规范。 时间安排: 1、2008 年7 月5 日集中,作课设具体实施计划与课程设计报告格式的要求说明。 2、2008 年7 月5 日,查阅相关资料,学习电路的工作原理。 2、2008 年7 月6 日至2007 年7 月7 日,方案选择和电路设计。 2、2008 年7 月8 日至2007 年7 月10 日,电路调试和设计说明书撰写。 3、2008 年7 月11 日上交课程设计成果及报告,同时进行答辩。 课设答疑地点:鉴主14楼电子科学与技术实验室。 指导教师签名:年月日 系主任(或责任教师)签名:年月日
目录 1.步进电机原理 (2) 1.1步进电机简介 (2) 1.2步进电机原理及控制技术 (2) 1.3 步进电机驱动方法 (2) 1.4总体设计方框图 (3) 1.5设计原理分析 (3) 1.5.1元器件介绍 (3) 1.5.2方案论证 (5) 2硬件设计 (6) 2.1控制电路 (6) 2.2最小系统 (6) 2.3驱动电路 (7) 2.4显示电路 (7) 2.5总体电路图 (8) 3软件设计 (9) 4程序编写 (9) 5实验心得及体会 (17) 参考文献 (17)
研控步进电机YKA2404MCD说明书
YKA2404MC/ YKA2404MD 细分驱动器 特点 ◆ 低噪音、平稳性极好 ◆ 高性能、低价格 ◆ 设有12/8档等角度恒力矩细分,最高200细分,使运转平滑,分辨率提高 ◆ 采用独特的控制电路,有效的降低了噪音,增加了转动平稳性 ◆ 最高反应频率可达200Kpps ◆ 步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电机过热 ◆ 双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率 ◆ 光电隔离信号输入/输出 ◆ 驱动电流从0.1A/相到4.0A/相连续可调 ◆ 可以驱动任何4.0A相电流以下两相混合式步进电机 ◆ 单电源输入,电压范围:DC12-40V ◆ 出错保护: ――过热保护 ――过流、电压过低保护 ◆ 体积小巧 YKA2404MC(D)是一款经济、小巧的步进驱动器,体积为25x136x92mm2。 典型应用 雕刻机激光打标机激光内雕机 概述 YKA2404MC(D)是等角度恒力矩细分型高性能步进驱动器,驱动电压DC12-40V,采用单电源供电。适配电流在4.0A以下,外径42-86mm的各种型号的二相混合式步进电机。 该驱动器内部采用双极恒流斩波方式,使电机噪音减小,电机运行更平稳;驱动电源电压的增加使得电机的高速性能和驱动能力大为提高;而步进脉冲停止超过100ms时,线圈电流自动减半,使驱动器的发热可减少50%,也使得电机的发热减少。用户在脉冲频率不高的时候使用低速高细分,使步进电机运转精度提高,最高可达200细分,振动减小,噪声降低。 电器规格 说明 最小值 典型值 最大值 供电电压(VDC) 12 跟用户要求有关 40 峰值输出电流(A) 0.1 跟用户要求有关 4.0 逻辑输入电流(mA) 15 步进脉冲相应频率(KHz)- - 200 脉冲低电平时间(uS) 2.5 - -
- Kinco步进电机驱动器2H1060使用说明书
- LN步进电机驱动器使用说明
- 黑色HST84步进驱动器
- Q2HB68MC步进电机驱动器
- DY3E系列三相混合式步进电机驱动器使用手册(EV1.3)
- M415B步进电机驱动器说明书
- 步进电机控制器使用说明
- 步进电机驱动器手册
- 步进电机驱动器 雷赛ND556说明书
- YKA3722MA步进电机驱动器使用说明书
- 步进电机驱动器说明书
- 山社步进电机驱动器手册
- 步进电机驱动器使用说明
- 步进电机驱动器说明书
- 步进电机驱动器说明书
- L298N步进电机驱动器使用说明
- 57系列数字式一体化混合伺服驱动器使用说明书-步进电机
- L298N步进电机驱动器使用说明
- 步进电机驱动器-ZD-M57P使用说明书
- 步进电机控制器说明书