基于多传感器数据融合的火灾预警系统

基于多传感器数据融合的火灾预警系统
赵 英,陈淑娟
(北京化工大学,北京 100029)
摘 要:为避免火灾造成的严重损失,实现火灾早期报警,本系统通过对火灾发生过程和产物的研究比较,采用多种传感器对火灾发生初期火灾特征较明显的几个参数进行监测,并实时反馈回采集的数据。系统利用D S 证据理论对多传感器数据进行融合分析,实现对同一目标的判断;本系统通过利用D S 证据理论对多传感器数据融合的方法,不仅弥补了采用单一传感器的不足,而且很大程度上降低系统判断结果的不确定性,提高了系统预警的准确性和可靠性。
关键词:D S 证据理论;多传感器;数据融合;火灾预警
中图分类号:T N919 34;T P212.9 文献标识码:A 文章编号:1004 373X(2010)24 0173 03
Fire Early Alarm System Based on Mu lti sensor Data Fusion
ZH A O Y ing,CH EN Shu juan
(Beijing U niversity of Chem i cal Technolog y,Beiji ng 100029,China)
Abstract :Fire early alarm system is used to prev ent damages caused by fire.T he system uses many kinds o f a ppro pr iate sensor s t o monito r several par ameters which have the o bv ious fire characterist ic accor ding to the research o n fire process,and to feedback the data r eal timely.T he sy stem realizes the multi sensor data fusion using the D S evidence theo ry to determine the tar get.T he method no t only makes up insufficiency of sing le senso r,but also reduces the uncertainty of judg ment result and enhances the accur acy and r eliability of the fir e ea rly ala rm system.
Keywords :Dempster Shafter evidence theor y;multi senso r;data fusio n;fir e ear ly alar m
收稿日期:2010 07 17
火灾探测是关系人民生命财产安全的重大课题。随着火灾探测技术的不断发展,人们对火灾的认识也越来越深入,不断涌现出新的探测手段。然而现有的大多数火灾探测器只能在火灾发生到难以控制的形势下才发出报警信号[1]
。而那些由于长期运行导致设备过载、过热、短路产生火灾的场所,如计算机机房、精密仪器实验中心、网络数据中心等,需要对火灾进行严格控制,确保在火灾发生初期就能及时发现火情并进行扑灭,否则造成的损失燃烧物都很少,因此如何能在火灾处于萌芽状态时,准确实现火灾早期探测,避免严重损失是目前亟待解决的一个重大问题。火灾的早期探测难题主要集中在探测对象难以选择、探测方法单一及准确预警概率低[2]
。本系统针对这些问题,在对火灾发生的过程和产物作了详细了解以后,选择适当的传感器对具有明显火灾特征的几个参数进行监测,再利用D S 证据理论对所有监测数据进行融合处理得到更为准确的判定结果。
1 火灾探测对象的选定
在火灾探测过程中,可以利用的火灾信息很多[3 4]:(1)固态高温产物:来源于可燃物中的杂质,以及高温状态下可燃物热裂解所形成的物质。
(2)燃烧音:燃烧过程中产生的高温,加热周围空气,使之膨胀,产生一种频率仅在数赫兹左右的压力声波,即是燃烧音。
(3)火焰光谱:主要由炽热微粒的光谱辐射和燃烧
气体的特征辐射所构成。
(4)气态燃烧产物:气态燃烧产物的主要成分为H 2O 、CO 、CO 2、H 2和O 2,由于环境中湿度的影响,通常不把H 2O 作为火灾探测参数。
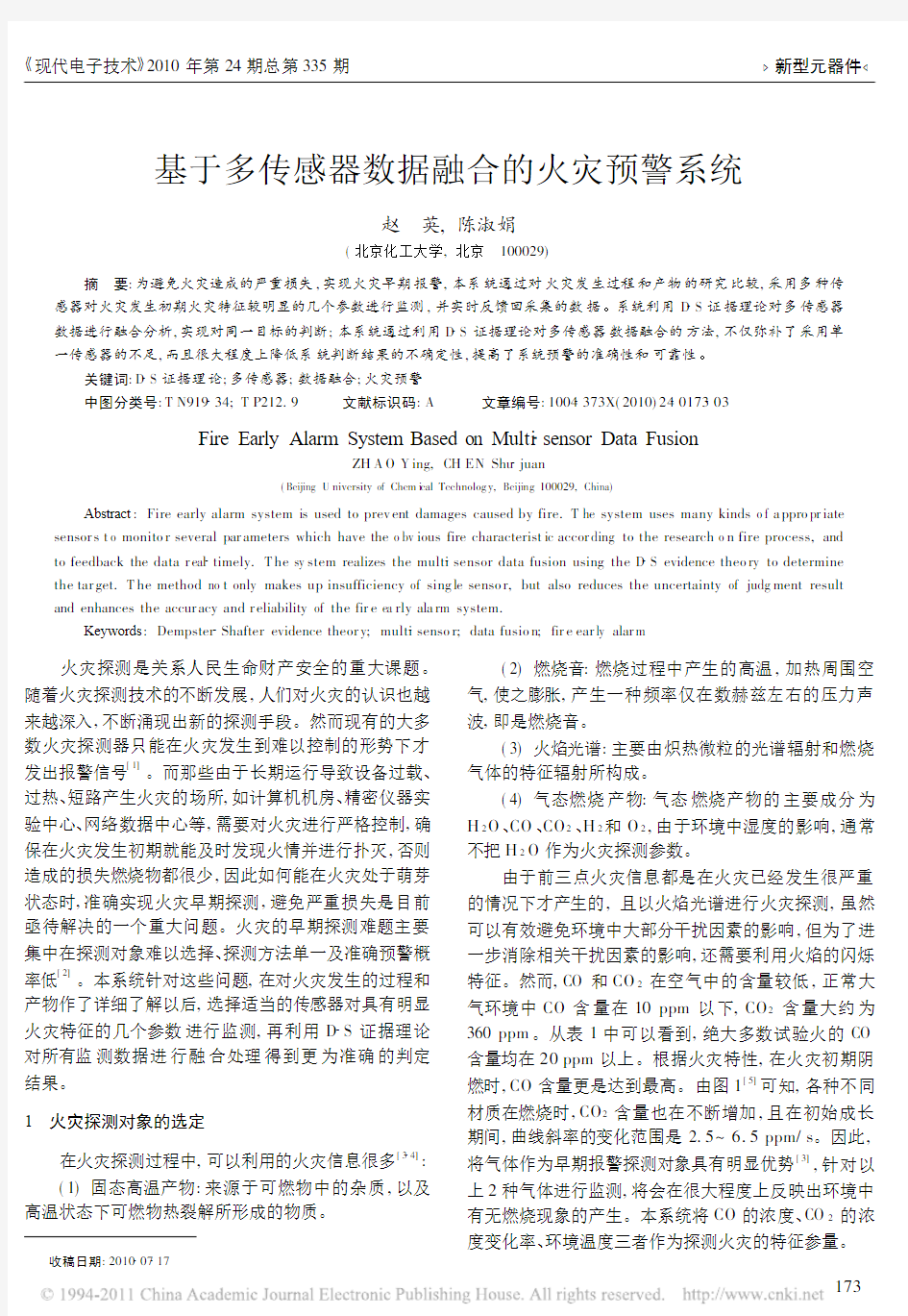
由于前三点火灾信息都是在火灾已经发生很严重的情况下才产生的,且以火焰光谱进行火灾探测,虽然可以有效避免环境中大部分干扰因素的影响,但为了进一步消除相关干扰因素的影响,还需要利用火焰的闪烁特征。然而,CO 和CO 2在空气中的含量较低,正常大气环境中CO 含量在10ppm 以下,CO 2含量大约为360ppm 。从表1中可以看到,绝大多数试验火的CO 含量均在20ppm 以上。根据火灾特性,在火灾初期阴燃时,CO 含量更是达到最高。由图1[5]可知,各种不同材质在燃烧时,CO 2含量也在不断增加,且在初始成长期间,曲线斜率的变化范围是2.5~6.5ppm/s 。因此,将气体作为早期报警探测对象具有明显优势[3],针对以上2种气体进行监测,将会在很大程度上反映出环境中有无燃烧现象的产生。本系统将CO 的浓度、CO 2的浓度变化率、环境温度三者作为探测火灾的特征参量。
现代电子技术 2010年第24期总第335期
新型元器件
表1 欧洲实验火结束时CO 浓度
实验火TF1T F2T F3TF4TF5T F6TF7CO 浓度/ppm
38
105
230
45
23
18
31
图1 U L268中标准试验火焰的CO 2浓度
2 系统总体结构
本系统是基于多传感器数据融合的火灾预警系统,采用C/S 结构,通过网络实现监控室服务器端与校园多个楼宇中的客户端远程实时监控各房间火灾情况,目前该系统已经在我校试运行。图2为多传感器数据融合火灾预警系统结构图,客户端主要由传感器模块、数据采集模块、数据处理融合模块、报警模块和通信模块组成;服务器端主要由数据处理模块、报警模块、参数修
改模块组成。
图2 火灾预警系统结构
系统通过不同传感器对CO 浓度、CO 2浓度、温度这3个参数进行监测和数据采集。本文主要介绍在数据处理过程中,如何利用D S 数据融合技术进行数据分析,实现火灾提前预警、且减少漏报误报概率、提高系统可靠性和准确性。3 火灾预警中的数据融合3.1D S 证据理论
数据融合的方法很多,其中Dem pster Shafer 证据理论是应用得最多的一种。它是一种处理不确定性的
推理方法。证据理论可处理由不知道所引起的不确定性。它采用信任函数而不是概率作为度量,通过对一些事件的概率加以约束以建立信任函数而不必说明精确的难以获得的概率[6]。
定义1 设D 为辨别框架,由一完备且互不相容的命题集合组成幂集2D ,在其上定义基本信任指派函数(basic pro bability assignment,BPA):m(A) [0,1],A 代表辨别框架中任一子集,m(A )表示证据支持命题A 发生的程度,m(A )满足如下条件:
m( )=0;
A D
m(A)=
1
(1)
式中:m(A )称为A 的基本数[7]
。
定义2 信任函数(belief function)[8 9]
Bel(A )表
示决策者对命题A 的总信任度,其定义为:
Bel:2D [0,1]
Bel (A )= B A
m(B)
A D,
B (2)
由定义可知:
m( )=0;m(D)=0
定义3 若A D 且A 0,称A 为m 的一个焦元(focal elem ent)。
Dempster 合成法则(dempster s rule of combina tio n)是反映证据的联合作用的一个法则。可概括如下:
设有基于判别框架上D 的2个证据体m 1,m 2,并分别含有焦元A 1,A 2, ,A n 和B 1,B 2, ,B n 。它们的组合运算为正交和m =m 1⊕m 2,m 为组合产生新的证据体。
m(A )=m 1(B)⊕m 2(C)=K -1
B i
C j
=A
m (B i )m(C j ),
A
(3)式中:
K =1-
B i
C j
=
m (B i )m(C j )
(4)
式中:K 表示2个证据体矛盾的程度,Dempster 组合规
则的结果根据K 值进行归一化,如果K =1,则表示几个证据体完全矛盾,不能应用Dempster 组合规则,如果K =0,则不用归一化。
对于多个信度函数的合成,m 1,m 2, ,m n 为2D 上的n 个BPA ,正交和m =m 1⊕m 2⊕ ⊕m n 为:
m( )=0;
m(A)=K -1
A i
=A
1 i n
(A i
) A =
(5)
式中:
K =1-
A i
=
1 i n
m (A i
)
(6)
传感器技术赵 英等:基于多传感器数据融合的火灾预警系统
从上面2个式子可以看出,多个证据的结合与次序无关,多个证据结合的计算可以用2个证据结合的计算递推得到。
3.2 D S 证据理论数据融合方法在多传感器火灾早期探测上的应用
多传感器数据融合的实质是在同一鉴别框架下,利用Dempster 合并规则将各个证据体合并成一个新的证据体,而产生的新的证据体就表示了融合所得的信息,然后根据决策规则进行决策。用D S 理论实现多传感器数据融合方法见图3
。
图3 用D S 理论实现多传感器数据融合方法
在多传感器数据融合系统中,首先初始给一次基本可信度的分配[10]。然后,每当收到一次传感器的信息,就进行一次基本可信度的分配,随着信息的不断传回,再不断地对基本可信度进行分配。最后,依据决策规则得出决策结果。本系统探测的3个对象,根据探测值不同,对断定是否发生火灾的可信度值也不同。表2中对
各个探测对象在不同范围内的值,赋予了不同的信任值,这些信任值不是精确得到的概率值,而是由经验和我校实验室火灾统计数据得到的。
表2 各参数不同范围值的信任值
数值范围确定其他不确定
CO 含量/ppm
10~15
0.30.30.415~200.60.10.320以上0.850.050.1CO 2变化率/(ppm /s)
2.0以下
0.10.70.22.0~4.00.40.50.14.0~6.00.70.10.26.0以上0.80.10.1温度/
40~50
0.30.30.450~600.60.20.260以上
0.9
0.05
0.05
当CO 浓度超过10ppm 时,确定发生火灾的概率较小;当超出20ppm 时,确定为火灾的准确率可高达85%。从我校实验室CO 2监测数据来看,即使浓度高达1500ppm 以上,也有可能是房间人数突然增多导致的,所以只从CO 2的含量探测数值来断定火灾,会有很大误差。但根据图1的结果得知,火灾发生时CO 2含
量是一直在递增的,且在火灾初始成长期间,曲线斜率(即增长速度)的变化范围是2.5~6.5ppm/s,因此本系统将CO 2的变化率作为数据融合对象。同样,随着温度值变高,能断定是火灾的概率也越大。以CO 含量为15~20ppm,CO 2变化率是2.0~4.0ppm/s,温度为40~50 这个情况为例,用D S 方法进行数据融合,从表3可以看出,不确定性的概率下降到了可以忽略的程度,即系统的不确定性明显降低;并且原来的单个传感器不能准确判定是否发生火灾,融合后正确判断的概率增大,即对来自3个不同传感器的数据融合提高了系统的判别火灾能力。
表3 D S 数据融合结果
传感器概率赋值
火灾其他不确定结论CO 含量
0.60.10.3火灾CO 2变化率
0.50.30.2火灾温度0.30.30.4不确定融合结果
0.75
0.21
0.04
火灾
4 结 语
传感器在采集信息过程中受多种因素的影响,不确定性是普遍存在的。Dempster Sharer 合并规则较好地解决了这种不确定性问题,将多个传感器获得的信息准确地合成为对目标(是否火灾)判定的一致性,增加了系统的正确决策能力。但是,这种方法的使用仍然存在一些局限性。即每一传感器对目标判决的概率赋值,需要依靠经验和数据积累不断进行更准确的设置。
参 考 文 献
[1]高志斌,孙永辉,程鑫.复合智能探测报警技术初探[J].中
国消防,2000(12):36 38.
[2]宋立巍.火灾信息数据库数据采集系统构成[J].消防科学
与技术,2004,23(1):73 75.
[3]佚名.无火灾信息的时间序列分析[J].消防科学与技术,
2006,25(6):749 751.
[4]张兢.基于多通道自适应加权融合算法的火灾特征识别
[J].国外电子测量技术,2006,25(1):31 34.
[5]王晔.多方面监测火灾特征以区分火灾探测[J].消防技术
与产品信息,2001(4):46 52.
[6]H A LL D L.M athematical techniques in multisenso r data
fusion [M ].Bosto n,U SA:A rtech Ho use,1992.
[7]夏阳,陆余良.D S 证据推理及算法实现[J].安徽大学学
报,2004,28(6):20 25.
[8]M A CII D,BO N I A.T utor ial 14:multisenso r data fusion
[J ].IEEE Instr umentation &M easur ement M agazine,2008,11(3):24 33.
(下转第179页)
场强度较小,属可接受范围。用球体模型得到验证,取两种状态平均值计算自差 =249nt。
(7)重复步骤(2)和(3),选择9种以上姿态分别测量未安装铁块和安装铁块的姿态角和总场参数。计算验证结果表明,为了印证实验结果的准确性,在该实验点重新在全姿态条件下均匀的测量了10组姿态参数同此实验数据对比,其结果见表5。从表5可以看出,相对于原状态不同姿态铁块干扰后误差最大达520nt,通过此方法校对后误差减小到25nt,极大地提高了传感器测量的准确性。在此提供了一个可靠的误差补偿方法,其运算结果稳定且均值平稳,有着相当好的补偿效果。如采用更高精度的传感器结果还可进一步提高。更为重要的是该方法计算量小,仅通过传感器本身的数据就可以完成运算,对设备的要求较小,因此有很强的实用性。
表5 实验数据对比结果
/( )
/( )
未安
装铁
块总
场/nt
未安
装铁
块校
正总
场/nt
安装
铁块
后总
场/nt
安装
铁块
后校
正总
场/nt
自差
补偿
后总
场/nt
校正
前误
差/nt
校正
后误
差/nt
153464894651324
55154652446914390 95274656946810241
135394657346162-411
17594650646523460794629946274-42725 215514660346083-520
255334658146025-561
295454655546071-484
335214639946068-311
4 结 语
在此结合传感器误差产生原理,研究了基于椭球体拟合的智能自差校对方法。其中,主要研究了椭球体自差模型的产生机理,并推导了自差补偿公式,通过由球到椭球在坐标系的映射方法,提高了传感器自差校对后的测量精度。该方法不需要复杂的操作和对专业设备的依赖,只需要依赖传感器不同姿态测试数据之间的相互关系就可以完成传感器的自差校对。实验表明,该方法在需要高精度传感器测量数据时消除载体自差和干扰误差方面有很高的应用价值和前景。
参 考 文 献
[1]GO LD EN BER G F.Geomag netic navigatio n beyo nd the mag
netic ao mpass[C].2006IEEE/IO N po sitio n,Lo cat ion and Nav ig ation Sym posium.IEEE/ION,2006:684 694.
[2]杨云涛,石志勇,关贞珍,等.地磁场在导航定位系统中的应
用[J].中国惯性技术学报,2007,15(6):686 692.
[3]张晓明,赵剡.一种快速载体磁场补偿方法研究[J].中北大
学学报,2009,30(3):286 291.
[4]张学孚,陆怡良.磁通门技术[M].北京:国防工业出版
社,1995.
[5]杨新勇,黄圣国.磁航向测量系统误差修正方法研究[J].仪
器仪表学报,2004,25(4):466 468.
[6]王维,张英堂,罗鸿飞.椭圆拟合在某新型磁定向系统罗差
补偿中的应用研究[J].军械工程学院学报,2009,21(3):
51 54.
[7]刘诗斌.无人机磁航向测量的自动罗差补偿研究[J].航空
学报,2007,28(2):411 414.
[8]黄汛,高启孝,周山.基于G PS辅助以实现捷联式数字磁罗
经自动消差的研究[J].中国惯性技术学报,2004,12(5):
31 35.
[9]Y AN G Y un tao,SH I Zhi y ong,G U A N Zhen zhen.R e
sear ch o f t he mag netic disturbances co mpensatio n algo rithm based on unifo rm design[J].Ship Science and T echno lo gy, 2009,31(5):13 17.
[10]丁士俊,畅开蛳,高琐义.独立网椭球变换与坐标转换的研
究[J].测绘通报,2008(8):4 6,35.
作者简介:许 杨 男,1984年出生,硕士研究生。主要从事信号处理、智能导航定位的研究。
石志勇 男,1965年出生,副教授。主要从事现代检测、智能车辆、导航定位的研究。(上接第175页)
[9]BH AT T A CH A RY A Pr abir.On the Dempst er Shafer ev i
dence theor y and non hiera rchical agg reg atio n of belief str uctures[J].I EEE T r ansactio ns on System M an and Cy bernetics Par t A:System and H umans,2000,30(5): 526 536.[10]KU M AR M anish,G A RG D ev endra P,ZA CHERY Randy
A.A metho d fo r judicious fusion of inconsistent multiple
sensor data[J].IEEE Sensor s Jo ur na l,2007,7(5): 723 733.
作者简介:赵 英 男,1966年出生,教授,博士。主要研究方向为分布式系统、网格计算、计算机网络。
陈淑娟 女,1983年出生,研究生。主要研究方向为计算机网络。
基于图像处理的多传感器融合的物体识别方法与相关技术
本技术公开了一种基于图像处理的多传感器融合的物体识别方法,包括以下步骤:S1:获取三通道RGB彩色图像及一通道多线激光测距图像;S2:将RGB彩色图像的摄像机光学坐标投射成激光点云坐标,激光点云坐标投射成360°环形全景坐标;S3:利用深度学习的图像识别技术,针对事先训练过的目标进行目标检测框选定,得到目标检测边界框分布图像及物体类别分布图像。本技术方法简单,实时性高,基于多传感器实现六通道图像的映射融合,在传统的RGBD四通道图像的基础上,增加了二通道来源于目标检测的物体类别分布图像、目标检测边界框分布图像,为实现快速准确的目标物体定位提供了精准的图像处理基础。 技术要求 1.一种基于图像处理的多传感器融合的物体识别方法,包括以下步骤: S1:获取三通道RGB彩色图像及一通道多线激光测距图像; S2:将RGB彩色图像的摄像机光学坐标投射成激光点云坐标,激光点云坐标投射成360° 环形全景坐标; S3:利用深度学习的图像识别技术,针对事先训练过的目标进行目标检测框选定,得到 目标检测边界框分布图像及物体类别分布图像。 2.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S1中,所述三通道RGB彩色图像通过摄像机原始图像获取,所述一通道多线激光测 距图像通过获取激光点云信息后生成独立图层得到。
3.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S2中,将摄像机坐标投射成激光点云坐标的具体步骤包括: S201:创建3D临时贴图,贴图坐标为激光坐标,贴图大小为单个摄像头贴图转换为激光点云坐标后的宽度和高度; S202:计算贴图下个像素的激光坐标; S203:判断下个像素是否为贴图的结尾像素,若不是则重复步骤S202,若是则进行下一步骤; S204:将八个摄像机贴图合并,拼接生成激光坐标下的360度全景图。 4.根据权利要求3所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,步骤S202的具体计算过程包括: 首先将激光坐标转换成摄像机镜头坐标,再将镜头坐标转换成摄像机像素坐标,最后将对应摄像机像素读取到贴图。 5.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S2中,将激光点云坐标投射成环形全景坐标的具体步骤包括: S211:创建一个激光点阵图层,大小为1920*1080,左右边缘角度为0—360°,上下角度为-15°—15°,左右边缘角度、上下角度均匀铺展拉伸; S212:读取一列激光点阵存储区数据; S213:计算打印图像的像素角度; S214:计算像素位置,将对应数据赋值到打印的图层; S215:判断当前读取的激光点阵存储区数据是否为数据的结尾,若不是则重复步骤S212—S214,若是则生成图像结束。 6.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S3中,事先训练过的目标包括目标人员、工作服、安全帽。
多传感器信息融合方法综述
万方数据
万方数据
万方数据
万方数据
万方数据
多传感器信息融合方法综述 作者:吴秋轩, 曹广益 作者单位:上海交通大学电子信息与电气工程学院,上海,200030 刊名: 机器人 英文刊名:ROBOT 年,卷(期):2003,25(z1) 被引用次数:2次 参考文献(5条) 1.周锐;申功勋;房建成基于信息融合的目标图像跟踪 1998(12) 2.张尧庭;桂劲松人工智能中的概率统计方法 1998 3.何友;王国宏;彭应宁多传感器信息融合 2000 4.罗志增;叶明Bayes方法的多感觉信息融合算法及其应用[期刊论文]-传感技术学报 2001(03) 5.张文修;吴伟业;梁吉业粗糙集理论与方法 2001 本文读者也读过(8条) 1.臧大进.严宏凤.王跃才.ZANG Da-jin.YAN Hong-feng.WANG Yue-cai多传感器信息融合技术综述[期刊论文]-工矿自动化2005(6) 2.多传感器信息融合及应用[期刊论文]-电子与信息学报2001,23(2) 3.赵小川.罗庆生.韩宝玲.ZHAO Xiao-chuan.LUO Qing-sheng.HAN Bao-ling机器人多传感器信息融合研究综述[期刊论文]-传感器与微系统2008,27(8) 4.范新南.苏丽媛.郭建甲.FAN Xin-nan.SU Li-yuan.GUO Jian-jia多传感器信息融合综述[期刊论文]-河海大学常州分校学报2005,19(1) 5.咸宝金.陈松涛智能移动机器人多传感器信息融合及应用研究[期刊论文]-宇航计测技术2010,30(2) 6.韩增奇.于俊杰.李宁霞.王朝阳信息融合技术综述[期刊论文]-情报杂志2010,29(z1) 7.肖斌多传感器信息融合及其在工业中的应用[学位论文]2008 8.丁伟.孙华.曾建辉.DING Wei.SUN Hua.ZENG Jian-hui基于多传感器信息融合的移动机器人导航综述[期刊论文]-传感器与微系统2006,25(7) 引证文献(2条) 1.武伟.郭三学基于多传感信息融合的轮胎气压监测系统[期刊论文]-轮胎工业 2006(5) 2.魏东.杨洋.李大寨.宗光华基于多传感器融合的机器人微深度环切[期刊论文]-传感器技术 2005(11) 本文链接:https://www.wendangku.net/doc/2a5269597.html,/Periodical_jqr2003z1037.aspx
多传感器融合实验报告
非线性卡尔曼滤波与多传感器融合 电信少41 刘星辰 2120406102 (1) 根据题目中给出的量测方程,进行坐标变换,得 ) )(sin(arctan ))()((sin )())(cos(arctan ))()((cos )(,,22,,,,22,,k i k i k k r i k i k i k i k k i k i k k r i k i k i k i k x x y y y y x x r k y x x y y y y x x r k x θθννθννθ+--?+-+-=?=+--?+-+-=?= 以此坐标画图,结果如下: (2) 将非线性问题线性化,新的量测方程为 k r k i k i k v X H Z ,,,+= 其中, ????? ??? ? ??? -+---+----+---+--=0)()() (0 )()()(0)()()(0)()()(2 22 22 22 2,i k i k i k i k i k i k i k i k i k i k i k i k i k y y x x x x y y x x y y y y x x y y y y x x x x H []T k k k k k y y x x X = 扩展卡尔曼滤波算法一个循环如下:
[]1 1 )1()1()1()|1()1|1() 1()'1()|1()1()'1()|1()1()1()1()()'()|()()|1()|1(?)1()1()|1(?)1|1(?--+++-+=+++++=++++++=++=++-++++=++k W k S k W k k P k k P k S k H k k P k W k H k k P k H k R k S k Q k F k k P k F k k P k k z k z k W k k x k k x 将量测方程代入,由于题目中未给出滤波器初值,因此参考作业二中的初值,得到的两个雷达估计的目标状态如下图: 距离均方根误差为 [] ∑=-+-= M i k k k k position y y x x M k RMSE 1 22)?()?( 1 )( 将估计位置、量测位置分别代入上式,得到两个雷达量测和估计的距离均方差,如下图:
多传感器数据融合技术的理论及应用
多传感器数据融合技术的理论及应用 张宁110101256 摘要:多传感器数据融合技术是一门新兴前沿技术。近年来,多传感器数据融合技术已经受到广泛关注,它的理论和方法已经被应用到许多研究领域。本文主要论述了多传感器数据融合的基本概念、工作原理、数据融合特点与结构、数据融合方法及其应用领域,并总结了当前数据融合研究中存在的主要问题及其发展趋势。 关键词:多传感器;数据融合;融合方法 1引言 多传感器数据融合是一个新兴的研究领域,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的研究。多传感器数据融合技术是近几年来发展起来的一门实践性较强的应用技术,是多学科交叉的新技术,涉及到信号处理、概率统计、信息论、模式识别、人工智能、模糊数学等理论。近年来,多传感器数据融合技术无论在军事还是民事领域的应用都极为广泛。多传感器数据融合技术已成为军事、工业和高技术开发等多方面关心的问题。这一技术广泛应用于复杂工业过程控制、机器人、自动目标识别、交通管制、惯性导航、海洋监视和管理、农业、医疗诊断、模式识别等领域。实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。 2基本概念及融合原理 2.1多传感器数据融合概念 数据融合又称作信息融合或多传感器数据融合,对数据融合还很难给出一个统一、全面的定义。随着数据融合和计算机应用技术的发展,根据国内外研究成果,多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。
多传感器数据融合作业
汽车防盗系统中的多传感器数据融合 一、引言 汽车日益成为人们生活中不可缺少的部分,然而,令汽车用户担忧的是车辆被盗现象呈逐年上升趋势。现在市场上汽车的防盗系统很多,它们都是多传感器的数据融合技术的应用。 二、汽车防盗系统的组成 汽车防盗系统主要由信号采集系统、报警系统、控制系统、通讯系统等组成。本系统的工作原理主要:传感器负责采集信号,一般每一种信号都有两个或两个以上不同种类的传感器负责采集,以保证当一个传感器损坏后不会影响系统的工作。当其中任何一个传感器检测到信号不正常时,传感器就会把信息告知中央处理系统,当中央处理器判定为有用的告警信号后就会立刻启动报警系统。 当中央处理器发出启动报警系统的命令后,视频系统负责记录偷车人的声音和相貌以给公安机关破案提供线索和证据,声光告警系统则会发出刺耳的鸣叫和亮光以惊吓偷车人使其放弃偷车。在防盗系统中通讯系统起着重要的作用,视频系统采集到的声音图像等信息传送给监控中心和车主,以使监控中心能及时的采取措施,如切断汽车油路等。现在的汽车防盗系统一般采用模块化设计,其系统的逻辑框图如图1-1所示。 图1-1
三、汽车防盗系统的传感器说明 3.1微波多普勒传感器 利用多普勒效应制成的传感器可以用来探测人体或物体的移动.该传感器在人或物体靠近时接收器接收的频率发生变化,当频率变化至设定值时,可以判断为有人或物体进入防盗系统的预警范围。 3.2振动传感器 该传感器的功能是将车辆所受外界作用的机械能转换为电信号。其作用是感受车身或车窗是否受到外界机械碰撞;汽车是否被非法升起,监测轮胎与轮毂之间的压力状态;监测驾驶座是否受压,能够对车体特殊频段的振动进行监测。如图是YD69正反转测量霍尔双通道传感器。 3.3倾角传感器 倾角传感器监测车体相对于初始位置是否出现倾角变化,如果这种角度的变是以特定频率出现或达到设定的阈值就可以判断为汽车整体被搬运.如图是一个电压型单轴倾角传感器。
多传感器数据融合
多传感器数据融合 多传感器数据融合1引言数据融合一词最早出现在20世纪70年代末期。几十年来,随着传感器技术的迅速发展,尤其在军事指挥系统中对提高综合作战能力的迫切要求,使其得到了长足的发展。其早期主要是应用在军事上,而随着工业系统的复杂化和智能化,近年来该技术推广到了民用领域,如医疗诊断、空中交通管制、工业自动控制及机械故障诊断等。数据融合是针对一个系统中使用多个传感器这一问题而展开的一种信息处理的新的研究方向,所以数据融合也称为传感器融合。数据融合一直没有一个统一的定义,一般认为:利用计算机技术,对按时间顺序获得的若干传感器的观测信息,在一定的准则下加以自动分析、综合,从而完成所需要的决策和估计任务而进行的信息处理过程称为数据融合。2
数据融合技术的分类多传感器数据融合涉及到多方面的理论和技术如信号处理、估计理论、不确定性理论、模式识别最优化技术、神经网络和人工智能等。很多学者从不同角度出发提出了多种数据融合技术方案。从技术原理角度,可分为假设检验型数据融合、滤波跟踪型数据融合、聚类分析型数据融合、模式识别型数据融合、人工智能型数据融合等;按判决方式分有硬判决型和软判决型数据融合;按传感器的类型分有同类传感器数据融合和异类传感器数据融合按对数据的处理方式,可分为象素级融合、特征级融合和决策级融合;从方法来分有Bayes推理法、表决法、D-S 推理法、神经网络融合法等。从解决信息融合问题的指导思想或哲学观点加以划分,可分为嵌入约束观点、证据组合观点和人工神经网络观点三大类。3常用的数据融合方法数据融合方法种类繁多,图1归纳了常用的一些信息融合方法。估计方法
多传感器数据融合技术
多传感器数据融合技术
姓名:李承尚 学号: 081308309 专业:电子信息工程
多传感器数据融合是一门新兴技术,在军事和非军事领域中都到了广泛应用、多传感器数据融合技术汲取了人工智能、模式识别、统计估计等多门学科的相关技术,计算机技术的快速发展以及数据融合技术的成熟为数据融合的广泛应用提供了基础。 多传感器数据融合是一个新兴的研究领域,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的研究。多传感器数据融合技术是近几年来发展起来的一门实践性较强的应用技术,是多学科交叉的新技术,涉及到信号处理、概率统计、信息论、模式识别、人工智能、模糊数学等理论。多传感器融合技术已成为军事、工业和高技术开发等多方面关心的问题。这一技术广泛应用于C3I(command,control,communication and intelligence)系统、复杂工业过程控制、机器人、自动目标识别、交通管制、惯性导航、海洋监视和管理、农业、遥感、医疗诊断、图像处理、模式识别等领域。实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。美国研究机构就在国防部的资助下,开展了声纳信号解释系统的研究。目前,在工业控制、机器人、空中交通管制、海洋监视和管理等领域也朝着多传感器融合方向发展。多传感器融合技术成为军事、工业和高技术开发等多方面关心的问题。 1 基本概念及融合原理
1.1 多传感器数据融合概念 数据融合又称作信息融合或多传感器数据融合,对数据融合还很难给出一个统一、全面的定义。随着数据融合和计算机应用技术的发展,根据国内外研究成果,多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 1.2 多传感器数据融合原理 多传感器数据融合技术的基本原理就像人脑综合处理信息一样,充分利用多个传感器资源,通过对多传感器及其观测信息的合理支配和使用,把多传感器在空间或时间上冗余或互补信息依据某种准则来进行组合,以获得被测对象的一致性解释或描述。具体地说,多传感器数据融合原理如下:(1)N个不同类型的传感器(有源或无源的)收集观测目标的数据; (2)对传感器的输出数据(离散的或连续的时间函数数据、输出矢量、成像数据或一个直接的属性说明)进行特征提取的变换,提取代表观测数据的特征矢量Yi; (3)对特征矢量Yi进行模式识别处理(如,聚类算法、自适应神经网络或其他能将特征矢量Yi变换成目标属性判决的统计模式识别法等)完成各传感器关于目标的说明; (4)将各传感器关于目标的说明数据按同一目标进行分组,即关联;
多信息融合作业
制造系统多信息融合及应用 A:简答题 1、简述多信息融合的目的是什么?信息融合的典型问题与方法有哪些? 答:多信息融合是指用多信息源对事物的不同侧面、不同阶段、不同深度进行融合决策,以获得完整全面的预测,避免单一信息源的片面偏差。它的主要目的是有效组织与利用能够获得的多种信息资源,提供比只采用其中部分信息资源获得更准确、更可靠、更协调、更经济与更稳定的决策结果。 典型问题有:(1)问题:传感感知的多数据源和多信息源具有不同的感知机理和不同数据类型(即异类);多源数据和信息之间常常不能保持同步;感知的时空范围中目标、时间或者更复杂的态势可能存在变化等,方法:传感感知事件的时空协同、动态协同,面向目标、事件或者复杂态势的合适的控制等。(2)输入的数据类型可能存在差异,方法:引入来自外部参数系统的定位信息等,研究有针对性的解决方法等。(3)不同事件(特征)集中的“目标”数目不一致;输入数据含糊、不一致、冲突或不可靠;输入数据相关的噪声/误差,方法:产生一组可能表示现实世界的模型假设。利用方法选择与获取数据最接近的假设等。(4)决策对象可能比较复杂,具有多目标或者多时间、多层次和多侧面处理需求,复杂的动态(如态势和威胁)的表达和处理模式,方法:利用多层次的概念,包括对象的多层次、处理的多层次、元模型的多层次、多侧面处理等;针对不同层次研究具体的适用理论方法和处理结构;多远信息的协同分析;建立专门的融合评价平台等。 2、如何理解信息融合的层次?对于特定系统对象,试比较数据层融合与特征层融合在有效性方面的区别? 答:信息融合的层次有两个层次的含义:一层含义是直接针对融合单元的输入输出关系的表述,这些关系中最常见的有数据-数据对、特征-特征对和决策-决策对,于是形成了数据层融合、特征层融合和决策层融合;另一层含义是针对和整个融合决策任务来说的,依据融合任务的主体情况,任务主导的输入-输出需求,确定数据、特征、决策三层的划分。 区别:进行数据层融合的数据集可以来自不同的传感器和(或者)不同的信息源,数据层融合结果一般是数据,可以通过算法提供相应的特征;特征层融合的输入特征可能来自不同数据层融合的结果、也可能来自其他直接提供特征的信息源或者渠道,特征层输出可以直接形成相应的决策。 3、数据关联有哪些类型,如何将异源、异构数据进行关联? 答:数据关联分为静态数据关联和动态数据关联,静态数据关联存在三种典型情况:具有同样维数的多传感器的数据关联、具有不同维数的多传感器的数据关联和具有多个站点的多传感器的数据关联。 对象代理模型可以作为数据集成的一种通用的数据模型,它也是能够很好地解决各个异
浅析多传感器数据融合技术存在的问题和发展展望
龙源期刊网 https://www.wendangku.net/doc/2a5269597.html, 浅析多传感器数据融合技术存在的问题和发展展望 作者:宋晓君孙洪伟 来源:《活力》2011年第07期 多传感器数据融合技术的基本原理像人脑综合处理信息一样充分利用多个传感器资源。通过对这些传感器及其观测信息的合理支配和使用,把多个传感器在时间和空间上的冗余或互补信息依据某种准则进行组合,以获取被观测对象的一致性解释或描述。数据融合的基本目标是通过数据优化组合导出更多有效信息。它的最终目标是利用多个传感器共同或联合操作的优势,来提高多个传感器系统的有效性。 一、数据融合技术存在的问题 数据融合技术国内外虽经多年研究取得了不少成果,也已经成功地应用于多种领域,但目前仍未形成一套完整的理论体系和有效的融合算法。绝大部分都是针对特定的问题特定的领域来研究,也就是说数据融合的研究都是根据问题的种类特定的对象特定的层次建立自己的融合模型和推理规则,有的在此基础上形成所谓的最佳方案。但多传感器数据融合系统的设计带有一定的盲目性,有必要建立一套完整的方法论体系来指导数据融合系统的设计。具体的不足之处有: 1.未形成基本的理论框架和广义融合算法。目前,绝大多数的融合研究都是针对特定的应用领域的特定问题开展的(混合结构,分布式)。即根据问题的种类,各自建立直观的融合准则,形成“最佳”融合方案,未形成完整的理论框架和融合模型,使得融合系统的设计具有一定的盲目性。统一的数据融合理论必然是以传感器信号和数据处理理论、C3I系统情报处理理论和指挥决策理论等在工程实践基础上的、研究上一层次融合机理的再创造过程。难点在于在大量随机与不确定问题中的融合准则确定,这些不确定性反应在测量不精确、不完整、不可靠、模糊,甚至信息冲突中。 2.关联的二义性。关联的二义性是数据融合的主要障碍。在进行融合处理前,必须对来自多传感器的观测结果进行关联,保证所融合的信息是来自同一观测目标或事件。以保证融合信息的一致性。传感器测量的不精确性和干扰都是引起关联二义性的因素。如何降低关联二义性是数据融合研究领域亟待解决的问题。 3.融合系统的容错性或稳健性没有得到很好的解决。
多传感器数据融合算法.
一、背景介绍: 多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman 滤波技术结合进一步得到研究需要的更纯净的有用信号。 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络和人工智能等。多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 多传感器信息融合技术通过对多个传感器获得的信息进行协调、组合、互补来克服单个传感器的不确定和局限性,并提高系统的有效性能,进而得出比单一传感器测量值更为精确的结果。数据融合就是将来自多个传感器或多源的信息在一定准则下加以自动分析、综合以完成所需的决策和估计任务而进行的信息处理过程。当系统中单个传感器不能提供足够的准确度和可靠性时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范围,改善了系统的可靠性,对目标或事件的确认增加了可信度,减少了信息的模糊性,这是任何单个传感器做不到的。 实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。 多传感器数据融合虽然未形成完整的理论体系和有效的融合算法,但在不少应用领域根据各自的具体应用背景,已经提出了许多成熟并且有效的融合方法。多传感器数据融合的常用方法基本上可概括为随机和人工智能两大类,随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可以预见,神经网络和人工智能等新概念、新技术在多传感器数据融合中将起到越来越重要的作用。 数据融合存在的问题 (1)尚未建立统一的融合理论和有效广义融合模型及算法; (2)对数据融合的具体方法的研究尚处于初步阶段; (3)还没有很好解决融合系统中的容错性或鲁棒性问题; (4)关联的二义性是数据融合中的主要障碍; (5)数据融合系统的设计还存在许多实际问题。 二、算法介绍: 2.1多传感器数据自适应加权融合估计算法: 设有n 个传感器对某一对象进行测量,如图1 所示,对于不同的传感器都有各自不同的加权因子,我们的思想是在总均方误差最小这一最优条件下,根据各个传感器所得到的测量值以自适应的方式寻找各个传感器所对应的最优加权因子,使融合后的X值达到最优。
2018机器人传感器习题题库 - 附答案
1.多传感器数据融合的结构形式有串联型融合,并联型融合,混联型融合。 2. 3 4自校准层中用到的算法包括自适应加权算法、和(贝叶斯估算法,分布图与分批估计算法)。 5传感器一般由敏感元件,转换元件,测量电路,辅助电路等组成。 6机器人由机械部分、传感部分、控制部分三大部分组成。 7.智能传感器是由传感器和微处理器相结合而构成。 8.根据信息融合处理方式的不同,可以将多传感器信息融合系统结构分为集中、分散、混合、反馈型等。 9.常用的多传感器信息融合方法可以分为以下四大类。 10.根据处理对象的层次不同,可以将信息融合分类为数据层融合、特征层融合、决策层融合。 12.11.序号跳了, 13.11、12并没有题目。 14.机器人的机械结构系统由机械构件和传动机构组成。 15.机器人的运动方式主要有、、、及。 16.机器人传感器分为内部传感器和外部传感器两种。 17.多传感器信息融合过程主要包括A/D、数据预处理、特征值提取、和融合计算等环节。 18.智能传感器的硬件结构模块要由以下六个部分组成一个或多个敏感器件、微处理器或为控制器、非易失性可擦写存储器、双向数据通信的接口、模拟量输入输出接口、高效的电源模块。 19.传感器的标定可分为动态标定和静态标定。 20.传感器按构成原理分类为结构型和物性型。 21.压电传感器是根据压电效应制造而成的。 22.机器人的机械结构系统中的机械构件由机身、手臂和末端执行器三大件组成。 23.机器人驱动系统的驱动方式主要有液压、气压和电气。 24.机器人内部传感器主要包括位置、速度、加速度、倾斜角、力觉传感器等五种基本种类。 25.智能传感器是由传感器和微处理器相结合而构成的。第7题重复 26.多传感器信息融合的常用方法可以分为估计、分类、推理、人工智能四大类。 26.传感器按能量关系分类为能量转换和能量控制型;按基本效应分类分为物理、化学、生物型。第19题合并 27传感器进行动态特性标定时常用的标准激励源有周期函数和瞬变函数两种。 28机器人的机械结构系统由机械构件和传动系统组成。第13题重复 29机器人外部传感器主要包括视觉传感器、触觉、接近度、激光等基本种类。 30.智能传感器的实现方式主要有非集成化的模块方式、集成化实现和混合实现三种形式。 31.多传感器信息融合的系统结构分为集中、分散、混合、反馈型四大类。第8题重复 32.机器人电器驱动系统中,马达是其执行元件。
多传感器数据融合技术
多传感器数据融合技术 摘要:介绍多传感器数据融合技术的历史与研究现状,给出多传感器数据融合实现方法,最后给出应用和多传感器数据融合的不足与研究展望。 1 引言 多传感器数据融合是信息领域一个前景广阔的研究方向,世界各国都有学者和技术人员在开展数据融合技术的研究,我国对数据融合方面的研究也日益重视,国家自然科学基金和“863”计划已将其列入重点支持项目,因此,对多传感器数据融合进行学术与工程应用的研究具有重要意义[1]。 多传感器数据融合技术是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。多传感器数据融合技术从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化,它也为智能信息处理技术的研究提供了新的观念。数据融合作为一门跨学科的综合信息处理理论,涉及系统论、信息论、控制论、人工智能和计算机通信等众多的领域和学科[2]。 本文介绍数据融合技术发展历史与研究现状,描述数据融合技术的几种典型实现方法,给出数据融合技术的主要应,最后对数据融合技术研究中存在的问题和发展前景进行了论述。 2 多传感器数据融合技术概述 2.1 数据融合的定义 数据融合也称为信息融合,它的定义有很多。Mango lini将数据融合定义为:一套利用具有不同性质的各种源数据的方法、工具、方式,目的是提高所需信息的质量,此定义着重于融合的方法。Hall 和Llinas的定义是“数据融合技术是将来自多传感器和相关数据库的有关信息进行综合,以得到精度上的改善和更加具体的推断,而这些也可以通过单个传感器来得到”。这种定义虽然提到了数据信息的质量,但是仍注重于方法。美国国防部定义为“数据融合是一个多级、多方面的过程,这个过程处理自动识别、连结、相关、估计以综合多源数据和信息.。”这一定义简单地说就是“处理自动识别、连结、相关、估计
传感器作业-扫地机器人设计
第一章绪论 课题研究背景 近年来,随着计算机技术与人工智能科学的飞速发展,服务机器人技术逐渐成为现代机器人研究领域的热点。一方面随着信息高速发展和生活、工作节奏的加快,人们需要从繁杂的家庭劳动中解脱出来;另一方面人口的老龄化和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景。区别于工业机器人,服务机器人的一个主要特征就是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此扫地机器人是一种能够自动执行房间清扫的家用服务机器人,集中了机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能技术等多学科。开始于20世纪80年代的研究,现在已经有多重样机和产品,并且促进了家庭服务机器人行业的发展,也促进了移动机器人技术、图像、语音识别、传感器等技术的发展。许多发达国家都将其视为机器人研究的新领域给予重视。有关资料也预测扫地机器人是未来几年需求量最大的服务机器人,特别是日用扫地电器不论在市场上或者是在产品创新上,绝对是所有小家电产品中最活跃的,未来仍有很大的成长空间,因此此课题研究有很大的意义。 国内外研究现状 扫地机器人的特点 扫地机器人具有如下的特点: (1)扫地机器人自带电源,小巧轻便、操作简单、自主性强、具有很强的实用性。 (2)扫地机器人的工作环境主要为普通家庭环境,也可以用于机场候机大厅、展
览馆、图书馆等公共场所。环境的共同特征为有限的封闭空间、平整的地板以及走动的人员,因此可以归结为复杂多变、结构化的动态环境。所以环境适应性是对此类机器人的基本要求。 (3)扫地机器人的任务是清扫地面,工作的对象是地面的灰尘、纸屑以及其他一些小尺寸物体,而大尺寸物体不作为扫地机器人的处理对象。考虑到安全因素,扫地机器人必须对人及家庭物品等不构成任何危害,同时扫地机器人还必须具备自我保护的能力。 随着近年来计算机技术、人工智能技术、传感技术以及移动机器人技术的迅速发展,扫地机器人控制系统的研究和开发己具备了坚实的基础和良好的发展前景。扫地机器人的控制与工作环境往往是不确定的或多变的,因此必须兼顾安全可靠性、抗干扰性以及扫地度。用传感器探测环境,分析信号,以及通过适当的建模方法来理解环境,具有特别重要的意义。近年来对智能机器人的研究表明,目前发展较快并且对扫地机器人发展影响较大的关键技术是:路径规划技术、传感技术、吸尘清扫技术、电源技术等。 ①路径规划技术 扫地机器人的路径规划就是根据机器人所感知到的工作环境信息,按照某种优化指标,在起始点和目标点规划出一条与环境障碍无碰撞的路径,并实现所需清扫区域完全路径覆盖。按机器人工作环境不同可分为静态结构化环境、动态己知环境和动态不确定环境,按机器人获取环境信息的方式不同可以分为基于模型的路径规划和基于传感器的路径规划。根据机器人对环境信息知道的程度不同,可以分为两种类型:全局路径规划和局部路径规划。常用的环境建模的主要方法有:可视图法、自由空间法、栅格法、势场法等。与其它移动机器人相比较,扫地机器人作业环境和作业任务相对简单,机器人要实现自主路径规划、控制和作业并不困难。 ②传感技术 扫地机器人在工作时需要实时地检测自身状态信息和收集外界环境息,以控
传感器作业-扫地机器人设计
第一章绪论 1.1 课题研究背景 近年来,随着计算机技术与人工智能科学的飞速发展,服务机器人技术逐渐成为现代机器人研究领域的热点。一方面随着信息高速发展和生活、工作节奏的加快,人们需要从繁杂的家庭劳动中解脱出来;另一方面人口的老龄化和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景。区别于工业机器人,服务机器人的一个主要特征就是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此扫地机器人是一种能够自动执行房间清扫的家用服务机器人,集中了机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能技术等多学科。开始于20世纪80年代的研究,现在已经有多重样机和产品,并且促进了家庭服务机器人行业的发展,也促进了移动机器人技术、图像、语音识别、传感器等技术的发展。许多发达国家都将其视为机器人研究的新领域给予重视。有关资料也预测扫地机器人是未来几年需求量最大的服务机器人,特别是日用扫地电器不论在市场上或者是在产品创新上,绝对是所有小家电产品中最活跃的,未来仍有很大的成长空间,因此此课题研究有很大的意义。 1.2 国内外研究现状 1.2.1 扫地机器人的特点 扫地机器人具有如下的特点: (1)扫地机器人自带电源,小巧轻便、操作简单、自主性强、具有很强的实用性。 (2)扫地机器人的工作环境主要为普通家庭环境,也可以用于机场候机大厅、展览馆、图书馆等公共场所。环境的共同特征为有限的封闭空间、平整的地板以及走动的人员,因此可以归结为复杂多变、结构化的动态环境。所以环境适应性是对此类机器人的基本要求。 (3)扫地机器人的任务是清扫地面,工作的对象是地面的灰尘、纸屑以及其他一些小尺寸物体,而大尺寸物体不作为扫地机器人的处理对象。考虑到安全因素,扫地机器人必须对人及家庭物品等不构成任何危害,同时扫地机器人还必须具备自我保护的能力。 随着近年来计算机技术、人工智能技术、传感技术以及移动机器人技术的迅速发展,扫地机器人控制系统的研究和开发己具备了坚实的基础和良好的发展前景。扫地机器人的控制与工作环境往往是不确定的或多变的,因此必须兼顾安全可靠性、抗干扰性以及扫地度。用传感器探测环境,分析信号,以及通过适当的建模方法来理解环境,具有特别重要的意义。近年来对智能机器人的研究表明,目前发展较快并且对扫地机器人发展影响较大的关键技术是:路径规划技术、传
多传感器数据融合
多传感器数据融合技术及应用
目录 第一章概论 0 1.1数据融合的目的和应用 0 1.2数据融合的理论基础 (2) 1.2.1数据融合的基本原理 (2) 1.2.2数据融合的级别 (3) 第二章状态估计理论 (7) 2.1估计问题的构成 (7) 2.2状态估计问题 (8) 2.3离散线性系统的最优估计——Kalman 滤波技 术 (9) 第三章多传感器信息融合系统中的状态估计 (14) 3.1引言 (14) 3.2集中式多传感器信息融合系统中的状态估计 14 3.2.1单传感器的状态估计 (14) 3.2.2集中式多传感器状态估计 (16) 3.3分布式多传感器信息融合系统中的状态估计 18 第四章多传感器概率数据关联算法 (22) 4.1概率数据关联滤波器 (22) 4.1.1预备知识 (22) 4.1.2概率数据关联滤波器的基本思想 (23) 4.1.3关联概率()i k 的计算 (25)
4.1.4协方差P(k|k)的计算 (28) 4.2多传感器概率数据关联算法 (30) 4.2.1多传感器概率数据关联滤波器 (30) 第五章分布式多传感器信息融合中的 (34) 5.1引言 (34) 5.2模糊因数集与隶属度函数 (34) 5.2.1模糊因素集 (34) 5.2.2隶属度函数的选择 (36) 5.3模糊因素的确定与模糊集A的动态分配 (37) 5.3.1模糊因素与权向量初值的确定 (37) 的动态分配 (38) 5.3.2模糊因素权集A % 5.4模糊航迹关联算法 (40) 5.4.1模糊航迹关联算法 (40) 5.5多局部节点情况下的模糊关联算法 (41) 第六章多传感器多模型概率数据关联算法 (43) 6.1多模型算法(Multiple-Model Approach) (43) 6.2相互作用多模型—概率数据关联算法 (46) 第七章多传感器信息融合系统中的身份估计 (56) 7.1基于Bayes统计理论的身份识别 (56) 7.2基于D-S证据理论的身份识别 (56) 7.2.1基本理论 (57) 7.2.2证据理论的组合规则 (58)
无线传感器网络作业
无线传感器作业 :传感器网络节点使用的限制因素有哪些? 1.电源能量有限传感器节点体积微小通常只携带能量十分有限的电池。 2.通信能力有限 3.计算和存储能力有限,传感器节点是一种微型嵌入式设备,要求他价格低功耗小,这些 限制必然导致其携带的处理器能力比较弱,存储器容量比较小。 :网络传感器有哪些特点? 1.自组织性 2.数据为中心 3.应用相关性 4.动态性 5.网络规模 6.可靠性 :按照节点功能和结构层次划分,将传感器网络的结构有哪几种?各有什么特点? 答: 1.平面网络结构拓扑结构简单,易维护具有较好的健壮性事实上就是一种,a d h o c 网络结构的形成。由于没有中心管理节点,故采用自组织协同算法组成网络,其组网算法比较复杂。 2.分级网络结构:网络拓扑结构扩展性好,便于集中管理,可以降低系统的建设成本,提 高网络覆盖率和可靠性。 3.混合网络结构:同级网络结构相比较,支持功能更强大,但所需要的硬件成本更高。 4.m e s h网络结构:由无线节点构成网络,按mes h拓扑结构部署,网内有个节点至少 可以和一个其他节点通信支持多跳路由,功耗限制和移动性取决于节点类型及应用的特点,存在多种网络接入方式。 :传感器半径r,被监测区域面积为A,要求达到概率为p的覆盖率,确定传感器数目。 :WSN数据链路层中的媒体访问控制和误差控制的基本思想是什么? 媒体访问控制:①对于感知区域内密集布置节点的多跳无线通信,需要建立数据通信链路以获得基本的网络基础设施。②为了使无线传感器节点公平有效的共享通信资源,需要对共享媒体的访问进行管理。 误差控制:一般基于ARQ的误差控制,主要采用重新传送发费和管理发费。具有低复杂的编码与解码方式的简单误差控制码可能是无线传感器网络中误差控制的最佳解决方案。 :传输层中的Event-to-sink传输和Sink-to-Sensors传说的基本思想是什么? Event-to-sink 由于无线传感网络中存在大量的数据流,Sink节点需要获得一定精度,Event-to-sink的可靠度是必要的,包括了事件特征到Sink’节点的可靠通信,而不是针对区域内各节点生成的单个传感报告/数据包进行基于数据包的可靠传递。 Sink-to-Sensors
基于多传感器信息融合的智能机器人
基于多传感器信息融合的智能机器人 院-系:信息工程与自动化学院 专业:模式识别与智能系统 年级: 2011 级 学生姓名:朱丹 学号: 2011204082 任课教师:黄国勇 2011年11月
摘要 机器人多传感器信息融合是当今科学研究的热点问题。传感器是连接机器人智能处理过程与外界环境的重要纽带,一般智能机器人都配有数个不同种类的传感器。本文主要分析了多传感器系统在机器人当中的重要性和多传感器信息融合的基本原理,并探讨了多传感器信息融合技术在智能机器人中的应用。 关键词:智能机器人、多传感器、信息融合 引言 多传感器、信息融合技术与传统机器人的结合构成了智能机器人。要使机器人拥有智能,对环境变化做出反应,首先必须使机器人具有感知环境的能力。用传感器采集环境信息加以综合处理,控制机器人进行智能作业,更是机器人智能化的重要体现。在以往机器人智能领域的研究中,人们把更多的注意力集中到研究和开发机器人的各种外部传感器上。尽管在现有的智能机器人和自主式系统中,大多数使用了多个不同类型的传感器,但并没有把这些传感器作为—个整体加以分析,更像是—个多传感器的拼合系统。虽然在各自传感器信息处理与分析方面开展了大量富有成效的工作,但由于忽视了多传感器系统的综合分析,对提高智能系统的性能带来了不利影响,效率低下而且速度缓慢。 因此,多传感器信息融合技术较之单一传感器有非常大的数据准确度的优势,已经成为现在机器人研究领域的关键技术。 一、多传感器信息融合的基本原理 多传感器信息融合是人类和其他生物系统中普遍存在的一种基本功能。人类本能地具有将人体的各种功能器官(眼、耳、鼻、四肢)所探测的信息(景物声音、气味和触觉)与先验知识进行综合的能力,以便对周围的环境和正在发生的事件做出估计。这一处理过程是复杂的,也是自适应的,它将各种信息(图像、声音、气味、物理形状、描述)转化成对环境的有价值的解释,这需要大量不同的智能处理,以及适用于解释组合信息含义的知识库。 多传感器信息融合实际上是对人脑综合处理复杂问题的一种功能模拟。在多传感器系统中,各种传感器提供的信息可能具有不同的特征:时变的或者非时变的;实时的或者非实时的;快变的或者缓变的;模糊的或者确定的;精确的或者不完整的;可靠的或者非可靠的;相互支持的或互补的;相互矛盾的或冲突的。 多传感器信息融合的基本原理就像人脑综合处理信息的过程一样,它充分地利用多个传感器资源,通过对各种传感器及其观测信息的合理支配与使用,将各种传感器在空间和时间上的互补与冗余信息依据某种优化准则组合起来,产生对观测环境的一致性解释和描述。信息融合的目标是基于各传感器分离观测信息,通过对信息的优化组合导出更多的有效信息。它的最终目的是利用多个传感器共同或联合操作的优势,来提高整个传感器系统的有效性。
西北工业大学 信息融合期末作业-
多传感器信息融合技术综述 以及关于航空发动机故障检测的一些问题 姓名:何世明学号:2010302183 班级:09031101 内容摘要:多传感器信息融合技术是一门新兴学科,它的理论和方法已被应用到许多研究领域。本文主要对多传感器信息融合的模型与结构、信息融合的主要技术和方法、信息融合理论体系以及信息融合技术的应用等内容进行了概要介绍和展开了综述。故障诊断技术是实现航空发动机视情维护、降低使用维护成本、保证飞行安全的重要手段,成为航空动力技术领域的研究热点。本文就信息融合技术开在航空发动机故障融合诊断研究中,传感器故障融合诊断的一些问题予以处理。 关键词:航空发动机,故障诊断,多传感器;传感器故障诊断,信息融合;综述 随着传感器技术、数据处理技术、计算机技术、网络通讯技术、人工智能技术和并行计算的软硬件技术等相关技术的发展,多传感器信息融合技术已受到了广泛关注。我国从20世纪90年代也开始了多传感器信息融合技术的研究和开发工作,并在工程上开展了多传感器识别、定位等同类信息融合的应用系统的开发,现在多传感器信息融合技术越来越受到人们的普遍关注。 1 多传感器信息融合的主要技术和方法 信息融合作为对多传感器信息的综合处理过程,具有本质的复杂性。传统的估计理论和识别算法为信息融合技术奠定了不可或缺的理论基础。但同时我们也看到,近年来出现的一些新的基于统计推断、人工智能以及信息论的新方法,正成为推动信息融合技术向前发展的重要力量。 (1)信号处理与估计理论方法:信号处理与估计理论方法包括用于图像增强与处理的小波变换技术、加权平均、最小二乘、Kalman滤波等线性估计技术,以及扩展Kalman滤波(EKF),Gauss滤波等非线性估计技术等。 (2)统计推断法:统计推断法包括经典推理,Bayes推理,证据推理(D-S),随机集(Random Set)理论以及支持向量机(SVM)理论等。 (3)信息论方法:信息论方法有一个共同的特点,即目标实体的相似性反映了观测参数的相似性,因而不需要建立变量随机方面的模型。运用优化信息度量的手段融合多源数据,从而获得问题的有效解决。 (4)决策论方法:决策论方法往往应用于高级的决策融合。可以借助决策论方法融合可见光、红外以及毫米波雷达数据用于报警分析。 (5)人工智能方法:人工智能方法包括模糊逻辑、神经网络、遗传算法、基于规则的推理以及专家系统、逻辑模板法、品质因数法等,在信息融合领域的应用也取得了一定的成果。 (6)几何方法:几何方法通过充分探讨环境以及传感器模型的几何属性来达到多传感器信息融合的目的。 2 多传感器信息融合技术的应用 “信息融合”一词出现的初期,未引起人们的重视,只局限于军事应用方面的研究,C3I系统率先采用多传感器信息融合技术来采集和处理战场信息并获得成功。80年代中期,信息融合技术在军事领域中取得了相当大的进展,在各类