基于DSP的电子节气门控制器的研制

文章编号:1007-144X(2003)05-0000 - 00
基于DSP的电子节气门控制器的研制
尹叶丹,程昌银,全书海
(武汉理工大学自动化学院,湖北,武汉430070)
摘要:节气门是车用发动机一个十分重要的装置,是影响发动机性能的关键部件。针对新型电子节气门的特点,设计了一套基于TMS320LF2407 DSP的带CAN总线的电子控制单元,该控制单元可方便地与车辆中其他ECU组成分布式控制系统。运行结果表明该控制器具有设计合理、性能稳定、抗干扰能力强、可靠性高等优点。
关键词:电子节气门;DSP;CAN总线;控制算法
中图法分类号:TP271.5 文献标识码:A
1前言
节气门是汽车发动机的重要控制部件。为了提高汽车行驶的动力性、平稳性、经济性并减少排放污染,世界各大汽车制造商推出了各种控制特性良好的电子节气门及其相应的电子控制系统,组成电子节气门控制系统(ETCS)。由于ETCS的优越性,目前,世界上越来越多的大型汽车制造公司开始采用ETCS。传统机械式节气门面临着被电子节气门所取代的趋势。本设计是混合动力电动轿车控制系统的一个ECU单元。该控制系统是基于CAN总线的分布式控制系统。
2 系统组成
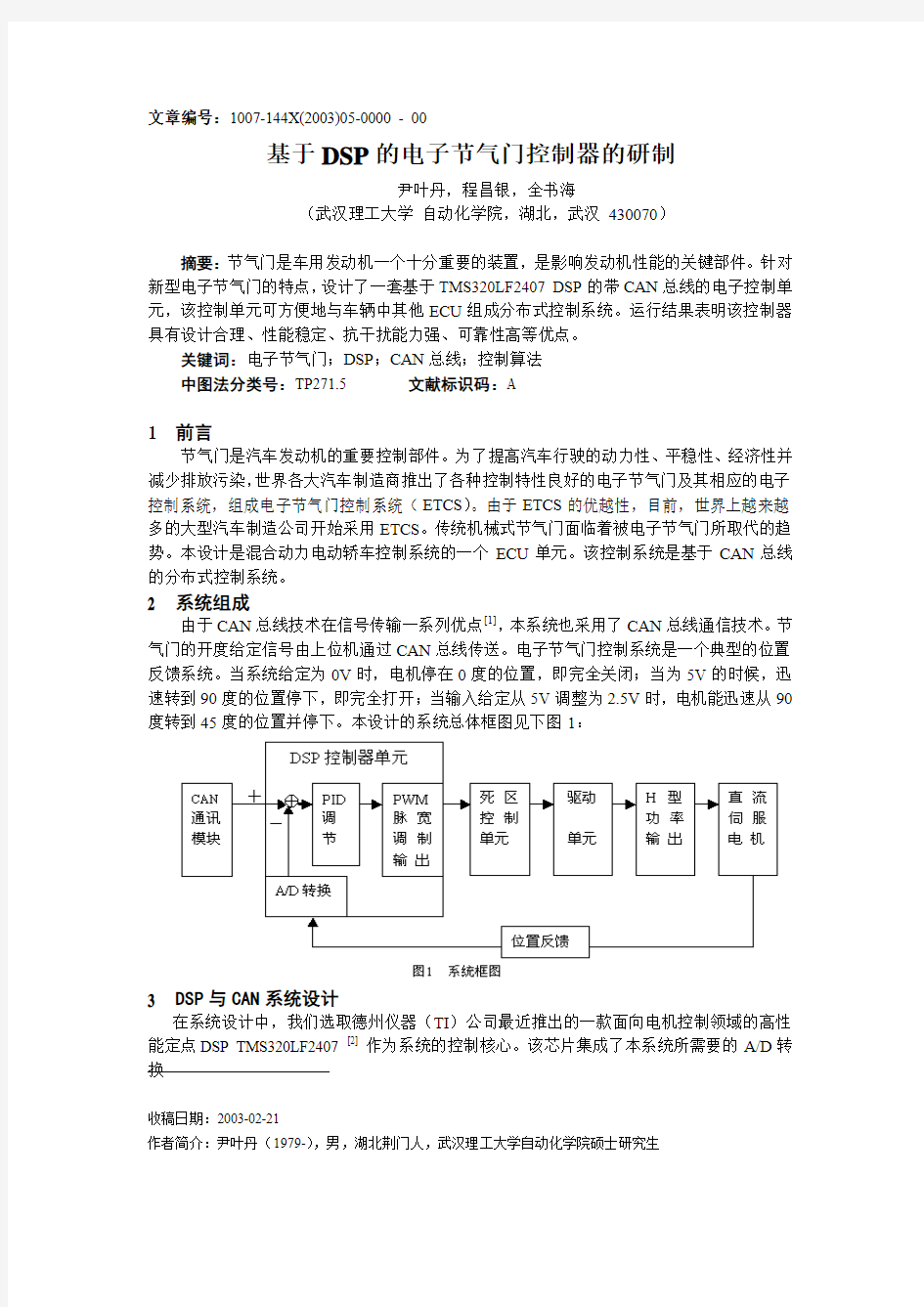
由于CAN总线技术在信号传输一系列优点[1],本系统也采用了CAN总线通信技术。节气门的开度给定信号由上位机通过CAN总线传送。电子节气门控制系统是一个典型的位置反馈系统。当系统给定为0V时,电机停在0度的位置,即完全关闭;当为5V的时候,迅速转到90度的位置停下,即完全打开;当输入给定从5V调整为2.5V时,电机能迅速从90度转到45度的位置并停下。本设计的系统总体框图见下图1:
3 DSP与CAN系统设计
在系统设计中,我们选取德州仪器(TI)公司最近推出的一款面向电机控制领域的高性能定点DSP TMS320LF2407 [2] 作为系统的控制核心。该芯片集成了本系统所需要的A/D转换
收稿日期:2003-02-21
作者简介:尹叶丹(1979-),男,湖北荆门人,武汉理工大学自动化学院硕士研究生
基金项目:国家863高技术研究发展计划资助项目(2001AA501213)
模块,PWM脉宽调制通道和CAN总线通讯模块以及多路IO输出。并且它还具有体积小,速度快的优点。
3.1 DSP控制单元
DSP控制单元结构图见图2。
节气门开度给定信号是通过
CAN总线由上位机传出,被本系
统DSP中的CAN控制器接收。节
气门位置反馈是一个模拟的电压
信号,因为TMS320LF2407 DSP
自带有模数转换模块,所以反馈信
号可以直接接到DSP的一路A/D引脚,当然需给DSP的A/D模块供电,并为转换提供基准参考电压。给定与反馈在DSP中经过一定的算法最终转化为占空比变化的PWM脉宽调制信号输出。为了调试方便,我们需为DSP扩展一个外部程序RAM。另外由于DSP的驱动能力有限,并且其工作电压为3.3V,所以其引脚输出或接收的一些信号包括CAN发送,CAN接收和IO口输出的信号都需经过缓冲和电平转换,才能与TTL的5V信号相接[3]。在本设计中,缓冲和电平转化由74HC245芯片一并完成,该芯片采用3.3V供电。
3.2 CAN总线接口电路
CAN总线采用的双绞线,两根线分别为CAN高和CAN低。图中的PCA82C250芯片就是驱动DSP的CAN控制器与物理总线间的接口,它是专用的CAN驱动芯片,提供对总线的差动发送和接收功能。它完成CANH,CANL和CAN发送,CAN接收之间的信号转换。82C250工作电压为5V。CAN总线终端的匹配电阻选用典型值为120欧。为了增强CAN通信的抗干扰能力,在缓冲器和CAN
驱动之间,我们设计了光电隔离电
路。采用的是高速光隔芯片6N137,
输入与输出的供电电压也都采用
5V。另外,为了避免电源引起的干
扰,CAN通信部分采用单独的
DC-DC电源模块供电。电路结构如
图3所示:
3.3 软件设计
在本系统的软件程序流程中,存在两个中断。一个是主控ECU(CAN上位机)每隔20ms 发出的数据引起本系统节气门ECU的中断,通过中断,从CAN总线上取出本系统中所需的数据并计算所要求的开度给定电压,更新该给定变量。另一个是本系统定时器周期到而引起的中断,在该中断服务程序中,进行控制算法,包括采样节气门位置反馈电压,智能PI 控制算法,然后更新PWM比较寄存器,通过调节PWM占空比调节节气门开度。在程序中PWM脉宽调制信号的周期设为200μs,即频率5kHz。
CAN控制器的配置:
在一个由CAN组成的分布式系统中,很多节点不断的向CAN总线发送不同的信号。所以我们必须屏蔽掉本系统不需要的信号。在CAN协议中,每一个节点都被分配固定的ID 号。当一组信号过来,CAN接收程序首先判断该信号的ID来源,如果是所需要的,则接收。CAN控制器配置具体指令如下:
LDP #DP_CANMBX
SPLK #0DAFEH, MSGID0H ;设置邮箱0的控制字及ID; IDE=1,AME=1,AAM=0
SPLK #0101H, MSGID0L ;设置邮箱0所接收节点的ID(低位)
SPLK #08H, MSGCTRL0 ;位RTR=0表示数据帧
SPLK #0000H, MBX0A ;接收邮箱0信息初始化
SPLK #0000H, MBX0B
SPLK #0000H, MBX0C
SPLK #0000H, MBX0D
LDP #DP_CANCTL
SPLK #0480H,MCR ;正常模式DBO=1,ABO=1,STM=0
SPLK #0001H,MDER ;ME3=1,MBXA发送,ME2=1接收,邮箱2,3使能
SPLK #0100H,CAN_IMR ;邮箱MBX0中断使能,高中断优先级
SPLK #0FFFFH,CAN_IFR ;清CAN模块的全部中断标志
CLRC INTM ;开总中断
RET ;返回
在上面的程序中设置了本系统的CAN控制器只接收ID标志为DAFE0101的节点发来的信息。
智能PI算法:
为了加快系统的的响应速度,我们采用了经过改进的智能PI控制算法。
If 偏差VE>0.5V ,then PWM比较值=173(最大值90%的占空比)
If 偏差VE>-0.5V ,then PWM比较值=19 (最小值10%的占空比)
Else U=U_last+ x0*(VE-VE_last)1+ x1*VE
If U>5V, then U=5V
If U<-5V,then U=-5V
PWM比较值=U*15.4+96
比例系数x0过大,抖动比较明显;积分系数x1过大,会出现振荡。故对于PI调节器的比例积分系数的选择需要在实验中反复调试,从而找出最佳的比例与积分系数。最后,通过控制算法得出的PWM比较值去改变DSP输出的PWM信号的占空比,由此来调节节气门的开度。
4 驱动控制电路
驱动电路部分包括死区控制,MOS管驱动电路和H桥功率输出三个部分。
4.1 死区控制单元
因为采用的是由4个MOS管组成的H全桥进行功率输出,所以必须考虑防止同一桥臂上下管同时导通。为此,我们设计了硬件死区控制电路,在保证同一桥臂的上(下)管已经完全关闭后,下(上)管才能开通。死区控制电路如下图4所示,由DSP过来的PWM信号在经过U10A后被分成高低电平完全相反的两路。对第一路信号,通过电容C27充电使该PWM脉宽调制信号波形由低电平上升到高电平的时刻被延迟,而由于二极管D4快速放电,保证高电平变低电平的时间不受到影
响。第二路信号同理。因此使得PWM1
(PWM2)信号在由高电平变低后必须经过
T的死区时间后,PWM2(PWM1)才由低电
平变为高电平。死区时间T可由R,C组成
的一阶电路的零状态响应公式:
-
Ucτ-
=,τ=R C计算求得。在实
)
Us
1(e t
验中,我们选取R=2k,C=0.01μF,最终测得
产生的死区时间为8μs。
4.2 MOS管驱动单元
既然采用4个MOS管组成的H桥功率输出,就必须对各个MOS管提供驱动。我们采用自举式MOS管专用驱动芯片IR2110,通过自举产生所需的多个地端,从而解决MOS管不共地的问题。该芯片的采用,大大简化了驱动电路。
IR2110芯片是一种适于功率MOSFET,IGBT驱动的自举式集成电路。它在电源变换,马达调速等功率驱动领域获得了越来越多的应用。其主要原因是,该电路芯片集成度高(可驱动同一桥臂两路),响应快,偏值电压高(<600V),驱动能力强,内部设欠压封锁。尤其是上管驱动采用外部自举电容上电,使得所需的驱动电源路数目较其他IC驱动大大减小。但IR2110使用不当,尤其是自举电容选择不好,易于造成芯片损坏或不能正常工作。一般来说,PWM开关频率高,电容应选小;占空比调节范围较大,特别是高占空比时,电容应选小,否则在有限的时间内无法达到自举电压。关于该芯片内部具体的工作原理[4],本文不
做详细介绍。
图5是本系统中的驱动电路。
PWM1和PWM2是由死区单元过
来的信号,在经过IR2110以后,
被分成四组(对应各自地端)分
别去驱动后面的四个MOS管。这
四组信号分别为(OUT1,GND1)、
(OUT2,GND0)、(OUT3,
GND3)、(OUT4,GND0),其中
OUT1,OUT3由自举产生。图中
的C21,C22为自举电容,在本系
统中,PWM开关频率为5kHZ,
占空比从10%到90%,变化范围
较大,自举电容C21,C22选取
0.1μF,工作良好。
4.3 H桥功率输出
驱动节气门电机的H型电路由4个MOSFET组成。MOSFET器件选用的是IRF530。因为MOS管通常在漏级与源级间存在有极间电容,能够积累一定的电荷,故在其关断后需要对其迅速放电。所以必须在每个MOS管的漏级与源级之间加上续流二极管。通过H桥电路,当PWM信号占空比大于50%时,节气门电机中对应电机正转;小于50%时,流过电
机的电流方向相反,对应电机反转;当占空比等于50%时,
节气门稳定在某个角度不动。
5 结束语
系统的阶跃响应见图6。测得节气门从0度转到90
度的响应时间为100ms。发动机台架试验表明该控制器具
有性能稳定、抗干扰能力强、可靠性高等优点,取得了十
分满意的控制效果。故该节气门控制器在电动汽车和混合
动力电动汽车中具有很高的应用价值。
参考文献:
[1]钨宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.
[2]刘和平.TMS320C24x DSP结构、原理及应用[M]. 北京航空航天大学出版社,2002.
[3]张雄伟,曹铁勇.DSP芯片的原理与开发应用(第2版)[M].北京:电子工业出版社,2000.
[4]马瑞卿,刘卫国.自举式IR2110集成电路的特殊应用[J].电力电子技术,2000(1):31-33.
Dev e lop of Electronic Throttle Control Unit based on DSP
YIN Ye-dan,CHENG Chang-yin,QUAN Shu-hai
Abstract:Throttle is one of important devices of the engine in automobile, which is the key part that affects the function of engine. According to the characteristics of new type electronic throttle (ET), ECU(electronic control unit) is put forward. The ECU is based on TMS320LF2407 DSP and CAN BUS. And by CAN BUS interface, it is convenient for building up a distributed control system with other ECUs of the vehicle. By the experiment, the ECU is proved with excellent stability, strong anti-jamming and high reliability. It showed the design is reasonable .
Key words:electronic throttle (ET); DSP; CAN BUS; Control arithmetic
YIN Y e-dan:Postgraduate, School of Automation, WHUT, Wuhan 430070, China .
电子节气门控制系统的工作原理
电子节气门控制系统的工作原理 电子节气门控制系统的工作原理2010-03-29 14:541、前言节气门的作用 是控制发动机的进气流量,决定发动机的运行工况。驾驶员通过操作加速踏板 来操纵节气门开度。加速踏板和节气门的连接方式有两种:刚性连接和柔性连接。传统油门采用刚性连接,即通过拉杆或拉索传动连接加速踏板和节气门的 机械连接方式,因此节气门开度完全取决于加速踏板的位置,即驾驶员的操作 意图,但从动力性和经济性角度来看,发动机并不总是完全处于最佳运行工况,而且驾驶员的误操作也给安全性带来隐患。在混合动力车中,由于发动机和电 池组成多能源动力系统,刚性连接方式不能实现各动力源之间的能量分配管理,因此,它必将被柔性连接方式所取代。柔性连接方式取消了传统的机械连接, 通过电控单元控制节气门快速精确地定位,因此又称为电子节气门。它的优点 在于能根据驾驶员的需求愿望以及整车各种行驶状况确定节气门的最佳开度, 保证车辆最佳的动力性和燃油经济性,并具有牵引力控制、巡航控制等控制功能,提高安全性和乘坐舒适性。本文通过阐述电子节气门系统的基本结构、工 作原理、控制策略和发展现状,使读者对电子节气门有深入的理解。2、电子节气门系统的基本结构和工作原理2.1电子节气门系统的基本结构电子节气门系 统的基本结构主要包括:a.加速踏板位置传感器加速踏板位置传感器由两个无 触点线性电位器传感器组成,在同一基准电压下工作,基准电压由ECU提供。 随着加速踏板位置的改变,电位器阻值也发生线性的变化,由此产生反应加速 踏板下踏量大小和变化速率的电压信号输入ECU。b.节气门位置传感器和踏板 位置传感器类似,节气门位置传感器也是由两个无触点线性电位器传感器组成,且由ECU提供相同的基准电压。当节气门位置发生变化时,电位器阻值也随之 线性地改变,由此产生相应的电压信号输入ECU,该电压信号反映节气门开度 大小和变化速率。c.节气门控制电机节气门控制电机一般选用步进电机或直流 电机,经过两级齿轮减速来调节节气门开度。早期以使用步进电机为主,步进 电机精度较高、能耗低、位置保持特性较好,但其高速性能较差,不能满足节 气门较高的动态响应性能的要求,所以现在比较多地采用直流电机,直流电机 精度高、反应灵敏、便于伺服控制。d.控制单元(ECU)控制单元(ECU)是整个系 统的核心,包括两部分:信息处理模块和电机驱动电路模块。信息处理模块接 受来自加速踏板位置传感器的电压信号,经过处理后得到节气门的最佳开度,
电子节气门控制系统设计毕业设计
电子节气门控制系统设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期: I
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日 II
发动机电子节气门的控制原理
发动机电子节气门的控制原理 一、前言 节气门的作用是控制发动机的进气流量,决定发动机的运行工况。驾驶员通过操作加速 踏板来操纵节气门开度。加速踏板和节气门的连接方式有两种:刚性连接和柔性连接。传统油门采用刚性连接,即通过拉杆或拉索传动连接加速踏板和节气门的机械连接方式,因此节气门开度完全取决于加速踏板的位置,即驾驶员的操作意图,但从动力性和经济性角度 来看,发动机并不总是完全处于最佳运行工况,而且驾驶员的误操作也给安全性带来隐患。 在混合动力车中,由于发动机和电池组成多能源动力系统,刚性连接方式不能实现各动力源 之间的能量分配管理,因此,它必将被柔性连接方式所取代。柔性连接方式取消了传统的 机械连接,通过电控单元控制节气门快速精确地定位,因此又称为电子节气门。它的优点在 于能根据驾驶员的需求愿望以及整车各种行驶状况确定节气门的最佳开度,保证车辆最佳 的动力性和燃油经济性,并具有牵引力控制、巡航控制等控制功能,提高安全性和乘坐舒 适性。 本文通过阐述电子节气门系统的基本结构、工作原理、控制策略和发展现状,使读者对 电子节气门有深入的理解。 二、电子节气门系统的基本结构和工作原理 (一)电子节气门系统的基本结构 电子节气门系统的基本结构主要包括: 1?加速踏板位置传感器 加速踏板位置传感器由两个无触点线性电位器传感器组成,在同一基准电压下工作,基 准电压由ECU提供。随着加速踏板位置的改变,电位器阻值也发生线性的变化,由此产生反应加速踏板下踏量大小和变化速率的电压信号输入ECU o 2?节气门位置传感器 和踏板位置传感器类似,节气门位置传感器也是由两个无触点线性电位器传感器组成,且由ECU 提供相同的基准电压。当节气门位置发生变化时,电位器阻值也随之线性地改变,由此产生相应的电压信号输入ECU,该电压信号反映节气门开度大小和变化速率。 3?节气门控制电机 节气门控制电机一般选用步进电机或直流电机,经过两级齿轮减速来调节节气门开度。早期以使用步进电机为主,步进电机精度较高、能耗低、位置保持特性较好,但其高速性能较差,不能满足节气门较高的动态响应性能的要求,所以现在比较多地采用直流电机,直流电机精度高、反应灵敏、便于伺服控制。 4.控制单元(ECU ) 控制单元(ECU )是整个系统的核心,包括两部分:信息处理模块和电机驱动电路模块。 信息处理模块接受来自加速踏板位置传感器的电压信号,经过处理后得到节气门的最佳
电子节气门控制系统结构特点及其优势
电子节气门控制系统结构特点及其优势 2007-12-10 23:49 在生产了S-10s汽车已达20年之久的时候,通用汽车公司在2004年的秋季推出了他们的雪佛兰Colorado和GMC Canyon两款中级皮卡。在这两款车上,所采用的所有新的和改进的标准技术就是“ETC”这3个字母,即“电子节气门控制系统”。 自1988年宝马轿车开始应用电子节气门控制系统以来,该控制系统只是应用在一小部分高级轿车上。在过去的3年中,电子节气门控制系统在美国已经被应用于更多本国生产的汽车上。从最新的报道可以看到,在大众化的汽车市场上,电子节气门控制系统已经成为许多售价仅为一万四千美元的汽车的标准配置了。通用汽车公司并不是唯一一家在汽车上采用电子节气门控制系统的汽车制造商,因为斯巴鲁公司已经宣布,他们将在2005年生产的所有车型上应用电子节气门控制系统。另外,福特汽车公司的旗舰产品福特F-150也将采用电子节气门控制系统。电子节气门控制系统的技术已经相当成熟,其价格已经降了下来,性价比也在不断地得到提高。在汽车上应用电子节气门控制系统已经成为1个发展趋势。 我们一般都是通过控制进入发动机的空气流量来调节发动机的转速。在传统的发动机设计方案中,节气门的位置主要是通过1个机械连杆机构(鲍顿拉索)来控制的,其中还包括弹簧、皮带轮以及其它的一些零件。 鲍顿拉索总成长时间以来都很好地发挥了它的作用,但是它也表现出了一些不足。首先,从汽车NVH(噪声、振动和不平顺性)和装配的角度来看,由于安装鲍顿拉索机构需要在驾驶室的前壁上开1个孔,以便将发动机节气门和驾驶室内的加速踏板连接在一起,而这个孔同时也就成为发动机噪声向驾驶室传播的1 个通道。其次,鲍顿拉索机构包含有多根钢丝,钢丝的2个末端分别与加速踏板和节气门阀片相连接。在这种情况下就必须设法将许多零部件布置在1个非常狭小的空间内。采用鲍顿拉索机构控制节气门所要面临的第3个问题是:由于整个操作过程都是通过机械连杆机构来完成,因此从驾驶员通过踩下加速踏板发出操作指令到执行机构做出响应就会出现1个时间滞后,这样就会导致驾驶员所期望的最好燃油经济性能和排放性能与发动机实际实现的往往并不一样。而采用电子节气门控制系统则可避免这种在时间上滞后现象的发生。根据发动机调试仪表测得的数据可以知道,替代机械连杆机构的电子节气门控制系统大大缩短了执行元件的响应时间,通过在驾驶员的操作和发动机的运转之间设置一些软件程序,还能够实现对发动机节气门开度更精确的控制,而节气门开度控制精度的提高将会改善发动机的燃油经济性能及排放性能。 电子节气门控制系统也称为电动线控驾驶系统,是将巧妙的设计应用于汽车工程的典型例子。大部分用来检验电子节气门控制系统应用于汽车的安全性方面的工作,人们都已经在军用和民用飞机上进行了。如果没有计算机的持续监测和对控制平面的不断调整,一些新型飞机根本就无法飞行。飞机这种对于超可靠性、远程计算机控制执行的需要,大大促进了电动线控驾驶系统相关技术的发展。
电子节气门控制系统的工作原理
上海大众斯柯达明锐轿车的电子节气门的故障检修 目录 摘要 (2) 前言 (2) 1 电子节气门概述 (2) 2 电子节气门控制系统的工作原理 (4) 2.1 加速踏板模块 (4) 2.2 节气门控制模块 (6) 2.3 发动机ECU (9) 2.2 电子节气门控制系统的控制过程 (11) 4 电子节气门的检修 (13) 4.1 节气门控制部件供电和导线的检查 (13) 4.2 加速踏板位置传感器的检查 (13) 5 故障案例分析 (14) 5.1故障现象 (14) 5.2故障诊断 (15) 5.3 故障排除 (15) 结束语 (16) 参考文献 (16)
摘要:当前大众车基本上配置有电子节气门控制(EPC)系统,其主要优点能根据驾驶人的需求及整车的行驶状况确定节气门的最佳开度,充分发挥了车辆最佳的动力性和燃油经济性,同时并具有巡行控制和牵引力控制等系列功能,提高安全性和乘坐舒。本文以上海大众斯柯达明锐轿车电子节气门为例,阐述其车型的电子节气门组成及控制原理;同时阐明了斯柯达明锐轿车电子节气门的检修方法;结合实际维修案例加以分析。 关键词:大众斯柯达明锐轿车电子节气门故障检修 前言 目前大众斯柯达明锐轿车采用电子节气门,它具有优点体现在能克服了机械油门对怠速和定速巡航进行控制的局限性,通过电控单元可对发动机全工况进行控制。而电子控制单元ECU精确控制电子节气门的开启度以满足空调、自动变速箱、平稳性动态控制、车速调节、发动机冷却等功能的需要。它是一种新的发动机负荷经管系统,可以较好地经管发动机的力矩。节气门位置根据发动机各项功能的需求来确定,当各项功能需求同时出现时,ECU按照内部的优先级别将节气门打开到某一开度,以满足优先级别最高的这项功能的需求。因此,现在越来越多的汽车采用电子油门。目前,大众车系绝大部分车型均采用了电子节气门,本文针对上海大众斯柯达明锐轿车1.4和1.6L发动机的电子节门维修进行探讨。 1 电子节气门概述 明锐轿车发动机电子节气门系统主要由节气门位置传感器、加速踏板位置传感器、ECU、数据总线、EPC指示灯和节气门执行器等组成(见图1),控制电路如图1所示。操纵加速踏板时,加速踏板位置传感器记录下加速踏板的位置,并将此信息传递给ECU,ECU根据此信息、废气排放、燃油消耗及安全等因素,确定转矩及
电子节气门位置传感器和节气门直到的检测
六、节气门直动式节气门位置传感器 a) 实物图 b) 结构示意图 图2-13节气门直动式怠速控制系统 怠速节气门位置传感器 2-应急弹簧 3-怠速电机 4-节气门位置传感器 5-怠速 稳定装置 6-怠速开关 以上几种节气门体都安装有怠速旁通气道,从而实现怠速控制,而节气门直动式怠速控制系统取消了旁通通道,而是通过控制节气门的开启角度,调节空气通道的截面来控制进气量,实现对怠速的控制,这种控制广泛的应用在大众车系。1.系统的组成和工作原理 图2-14节气门体电路图 RP1节气门位置传感器 RP2怠速节气门位置传感器 S 怠速开关 M怠速直流电 动机 节气门直动式怠速控制系统主要由节气门位置传感器、怠速节气门位置传感器,怠速开关和执行器(怠速直流电动机)以及一套齿轮驱动机构组成(见图2-13),图2-14为其内部线路图。节气门位置传感器和怠速节气门位置传感器都是由一个双轨形碳膜电阻和在其上滑动的触点组成。另外在节气门体上有一个双齿轮,它是由同轴的一个大齿轮和一个小齿轮组成。与怠速直流电动机同轴的小齿轮与双齿轮中的大齿轮啮合,扇行齿轮与节气门同轴并与双齿轮中的大齿轮啮合。当驾驶员踩加速踏板时,怠速开关断开,发动机ECU根据节气门位置传感器的输入信号判断发动机的运行工况,并进行喷油和点火的控制。当驾驶员不踩加速踏板时,节气门在回位弹簧的作用下关闭,怠速开关闭合。发动机ECU收到
怠速开关闭合的信号,得知发动机处于怠速运行状态,并根据怠速节气门位置传感器的信号和曲轴位置传感器的信号来控制直流电动机的动作,经过小齿轮、双齿轮和扇形齿轮將电动机的转速传递到节气门,使其打开相应的角度,使怠速转速达到最佳值。
电子节气门的原理及设计
湖南涉外经济学院 电子节气门的原理设计(论文) 专题名称电子节气门的原理及设计 系别汽车工程系 专业汽车运用技术 班级 200701班(五年) 姓名白子健 学号 12030701051 指导教师蔡月萍 2011 年 3月 20日
目录 一前言 (3) 二电子节气门系统分类与国内外的研究现状 (4) 三电子节气门的结构原理...........................5(1)电子节气门的系统组成和功能 (6) 四大众汽车节气门系统的工作原理与控制策略.........7五总结. (12) 参考文献 (12)
电子节气门的原理及设计 【内容摘要】:介绍电子节气门系统的结构系统与故障分析和排除,以及电子节气门基本结构、工作原理、及其控制策略,并且运用具体实例和多种车型来结合,通过指出传统的节气门的弊端指出电子节气门的优势和目前的不足之处。而在种种相比之下可以看出电子节气门的普及是势在必然的。 【关键词】:电子节气门;结构;原理;控制策略 【abstract 】: to introduce electronic throttle system structure system and fault analysis and exclusions, and electronic throttle basic structure, working principle, and the control strategy, and to use specific examples and range of vehicles to union, by pointing out the disadvantages of traditional throttle pointed out the advantage of electronic throttle and current deficiency. And in various compared can see the popularity of electronic throttle is ShiZaiBiRan. 【key words 】: electronic throttle; Structure; Principle; Control strategy 一、前言 电子节气门在线传操控技术中是相对容易实现产品化同时具备发展前景的。传统发动机节气门操纵机构采用机械连接方式,应用范畴受到限制并且缺乏精确性。电子节气门通过传感器、微处理器和执行器对节气门进行控制,反应更灵敏,控制更精确,结构简单,非常可靠。 电子节气门可以设置各种功能或与其它控制系统ECU通讯来改善
电子节气门控制
基于DSP的节气门控制 基于DSP的电子节气门PID控制 2007-5-29 15:56:55 【文章字体:大中小】打印收藏关闭 原作者:苏海峰,冯国胜 一、引言 随着现代电子技术的飞速发展,特别是微机技术在汽车上的广泛应用,使得汽车的内涵和功能不断拓展和延伸,汽车电子化正逐渐成为现代汽车的基本特征。节气门是汽车发动机的重要控制部件。为了提高汽车行驶的动力性、平稳性及经济性,并减少排放污染,世界各大汽车制造商推出了各种控制特性良好的电子节气门及其相应的电子控制系统,组成电子节气门控制系统(ETCS)。采用电子节气门控制系统,使节气门开度得到精确控制,不但可以提高燃油经济性,减少排放,同时,系统响应迅速,可获得满意的操控性能;另一方面,可实现怠速控制、巡航控制和车辆稳定控制等的集成,简化了控制系统结构。现在,电子节气门控制系统已成为发动机完全电控管理系统的一个重要模块。由于ETCS的优越性,目前,世界上越来越多的大型汽车制造公司开始采用ETCS,传统机械式节气门面临着被电子节气门所取代的趋势。 在电子节气门这种柔性连接方式中,油门踏板与节气门之间不再有机械连接。节气门的实际开度由车载电控系统根据当时的汽车行驶状况并考虑发动机特性确定,从而保证发动机运行于最佳工况。本设计进行了电子节气门控制系统的电控单元开发、传感器信号处理电路及执行器功率驱动电路的硬件电路设计,并进行了PID控制试验。
二、系统组成 电子节气门控制系统如图1所示,包括:节气门体、加速踏板位置传感器、DSP(Digital Signal Processor)开发板、信号处理电路、功率驱动电路及微机监控系统几个部分。节气门体包括:直流电机、节气门开度传感器及机械装置,它们被封装为一体。通过ECU驱动直流电机,完成节气门开度调整;节气门开度信号通过节气门体内部的一对高精度节气门开度传感器获取当前开度下相应的电压反馈值,该反馈值与节气门打开角度成线性变化。利用这两路反馈信号,构建闭环控制系统。加速踏板带动一个位置传感器,将加速踏板位置信号转变为电压信号传到ECU,其作用相当于一个反映驾驶员操纵意图的传感器,提供节气门开度的参考信号。 当驾驶员踩下加速踏板时,加速踏板位置信号经过模拟信号采样处理电路,由DSP进行采集、处理及判断驾驶员的驾车意图;同时参考发动机的转速传感器、进气压力传感器及其它与车辆行驶工况相关的传感器信号进行综合分析计算,确定一个期望的节气门开度值;并将期望值与当前反馈回来的节气门开度值进行比较,确定控制信号,发出脉宽调制信号,经过功率放大电路驱动执行器,实时调整占空比,实现各项控制功能。最后驱动电机使节气门移动到一个与期望的节气门开度值相对应的位置。 (一)电子节气门控制系统的核心DSP56F807
电子油门的工作原理
电子油门实际上就是节流阀体完全由电机控制,因此取消了油门踏板和节流阀体之间的油门拉线。 简单的就是,驾驶员的愿望将通过油门踏板的位置传感器传给发动机控制器,由发动机控制器通过电机实现对节流阀体的调节。 因此,即使驾驶员不踩踏油门踏板,发动机控制器也可以通过对节流阀体的调节而影响发动机扭矩,由此可以使发动机电控管理系统内和系统之间实现更理想的相互协调。 电子油门也称为电控油门(E一Gas)或线控驾驶(drivebywire),表面上看是取消了油门拉线,但实际上系统变得更为复杂。 电子油门的工作原理 电子油门控制系统 电子油门控制系统主要由油门踏板、踏板位移传感器、ECU(电控单元)、数据总线、伺服电动机和节气门执行机构组成。 位移传感器安装在油门踏板内部,随时监测油门踏板的位置。当监测到油门踏板高度位置有变化,会瞬间将此信息送往ECU,ECU对该信息和其它系统传来的数据信息进行运算处理,计算出一个控制信号,通过线路送到伺服电动机继电器,伺服电动机驱动节气门执行机构,数据总线则是负责系统ECU与其它ECU之间的通讯。 由于电子油门系统是通过ECU来调整节气门的,因此电子油门系统可以设置各种功能来改善驾驶的安全性和舒适性,其中最常见的就是ASR(牵引力控制系统)和速度控制系统(巡航控制)。 电子油门的功能 当ASR系统传感到车轮的旋转速度,ECU就根据油门踏板的位置、车轮速度和方向盘转向角度等之间的不同而求出滑动率,通过减少节气门开度来调整混合气流量,以降低发动机功率来达到控制目的。 而在ASR系统中,电子油门起到十分关键的作用,它涉及整个ASR系统中对车速控制、怠速控制等功能,使系统能迅速准确地执行指令。即当电子油门系统接受到ASR系统指令时,它对节气门控制指令只来自于ASR,这样就可以避免驾车者的误操作。 当驾车者使用速度控制系统时,车速传感器将车速信号输入ECU,再由ECU输出指令伺服电动机控制节气门开度。在这样的系统中,根据行驶阻力的变化由控制系统自动调节发动机节气门开度,使行驶车速保持稳定。因此电子油门系统也可以兼容巡航控制功能。 在目前的电子燃油喷射发动机上,电子油门除了发进一步改善发动机的节油和排放性能,因为它控制着发动机动力调节的大门。因此,电子油门可以发挥的作用是很多的。 挥上述功能外,它还可以进一步改善发动机的节油和排放性能,因为它控制着发动机动力调节的大门。 因此,电子油门可以发挥的作用是很多的。 电子油门节流阀体的调节 1.节流阀体机械调节 节流阀体机械调节就是驾驶员踩踏油门踏板,通过油门拉线对节流阀体进行直接调节。 对于节流阀体调节,为了改变发动机扭矩,必须调节其它调整参数,如点火提前角和喷油量。 节流阀体机械调节,发动机电控管理系统只有在怠速区域和巡航控制时节流阀体的调节才由电机控制。 2.节流阀体电控调节 节流阀体电控调节,就是在节流阀体的全部可调节区域内完全由电机调节。
电子节气门基本知识-20140303
电子节气门相关资料 电子节气门是汽车发动机的重要控制部件。 电子节气门系统的基本结构有以下几个部分组成: 1、发动机 2、转速传感器 3、节气门位置传感器 4、节气门执行器 5、节气门 6、加速踏板位置传感器 7、车速传感器 8、变速器 9、加速踏板 10、节气门电子控制单元(ECU) 为了提高汽车行驶的安全性、动力性、平稳性及经济性,并减少排放污染,世界各大汽车制造商推出了各种控制特性良好的电子节气门及其相应的电子控制系统,组成电子节气门控制系统(ETCS)。 采用电子节气门控制系统的作用: 1、使节气门开度得到精确控制,不但可以提高燃油经济性,减少排放,同时,系统响应迅速,可获得满意的操控性能; 2、可实现怠速控制、巡航控制和车辆稳定控制等的集成,简化了控制系统结构。系统组成: 1、带加速踏板位置传感器的加速踏板模块—用来确定踏板位置并将踏板位置信号传递给控制单元 2、发动机控制单元(ECU) —接收踏板位置传感器信号,根据输入电压信号计算得知所需动力。并根据其他如急加速,空调,自动变速器起步的扭矩信号,计算出实际的节气门开度。同时还监控节气门系统 3、节气门控制单元—控制所需进气量,根据控制系统提供信号调节节气门开度,反馈节气门信号。
4、节气门故障灯(大众车型在仪表上为EPC灯)—提供节气门故障信息给驾驶员 5、传感器和执行器传感器:带油门踏板传感器G79,G185的加速踏板模块,带节气门开度传感器的G187,G188,节气门控制器J338,离合器踏板开关F36,制动踏板开关F47,制动灯开关F 6、执行器: 带节气门驱动装置的G186和G338,节气门故障灯K132c(划片变组器,等同与油浮子)控制系统根据两个信号来确定踏板位置。两个信号值正好相反,形成对比。当一个传感器坏,系统监测到还有一个节气门信号时,能进入怠速运行,但节气门全开要很慢。 系统还通过制动灯开关和制动踏板开关信号来判别怠速状态,关闭巡航,点亮EPC,在故障存储器存储故障码。 节气门角度传感器G187,G188(滑动变阻器式)向系统反馈节气门位置信号。装两个传感器是为了精确和备用。当一个传感器坏。系统使用另一个传感器信号,对加速踏板响应不变,巡航关闭。EPC灯亮存储故障码。当两个信号中断,发动机在1500转左右运行,踩油门踏板无反应。EPC灯亮,有故障存储。 离合器踏板开关F36:开关信号,反馈离合器踏板位置,踏板踩下,负载变化功能关闭。系统不对其进行监控,故无故障码存储,也无替代值。 制动踏板开关F47和制动灯开关F(开关信号)反馈制动踏板信号位置信号,控制单元收到踏板信号后,关闭巡航。如加速踏板传感器坏,代为替代怠速信号。节气门驱动装置J186:定位电机。接受系统命令,控制节气门开度。出现故障后,进入紧急运行模式,由弹簧将节气门打开到一定角度,系统运行高与怠速,踩油门没反应。EPC灯亮,存储故障码。 故障灯EPC故障灯K132 :提示信号。系统正常时打开点火开关3秒自检后熄灭,有故障则常亮。 基本结构: 转速传感器也可以用曲轴位置传感器或者凸轮轴位置传感器来代替; 节气门执行器是一个步进电机,由它来推动节气门以控制节气门的开度; 加速踏板位置传感器的构造及工作原理和节气门位置传感器的构造及工作原理是一样的; 节气门电子控制单元一般是和发动机电子控制单元做在一起的。
电子节气门系统控制原理和发展现状
电子节气门系统控制原理和发展现状 江禹陶 (同济大学中德学院车辆工程专业) 摘要:介绍电子节气门系统的基本结构、工作原理、控制策略及其发展现状。指出,电子节气门的普及势在必然。 关键词:电子节气门;结构;原理;控制策略 1 前言 节气门的作用是控制发动机的进气流量,决定发动机的运行工况。驾驶员通过操作加速踏板来操纵节气门开度。加速踏板和节气门的连接方式有两种:刚性连接和柔性连接。传统油门采用刚性连接,即通过拉杆或拉索传动连接加速踏板和节气门的机械连接方式,因此节气门开度完全取决于加速踏板的位置,即驾驶员的操作意图,但从动力性和经济性角度来看,发动机并不总是完全处于最佳运行工况,而且驾驶员的误操作也给安全性带来隐患。在混合动力车中,由于发动机和电池组成多能源动力系统,刚性连接方式不能实现各动力源之间的能量分配管理,因此,它必将被柔性连接方式所取代。柔性连接方式取消了传统的机械连接,通过电控单元控制节气门快速精确地定位,因此又称为电子节气门。它的优点在于能根据驾驶员的需求愿望以及整车各种行驶状况确定节气门的最佳开度,保证车辆最佳的动力性和燃油经济性,并具有牵引力控制、巡航控制等控制功能,提高安全性和乘坐舒适性。 本文通过阐述电子节气门系统的基本结构、工作原理、控制策略和发展现状,使读者对电子节气门有深入的理解。 2电子节气门系统的基本结构和工作原理 2.1 电子节气门系统的基本结构 电子节气门系统的基本结构主要包括: l 加速踏板位置传感器 加速踏板位置传感器由两个无触点线性电位器传感器组成,在同一基准电压下工作,基准电压由ECU提供。随着加速踏板位置的改变,电位器阻值也发生线性的变化,由此产生反应加速踏板下踏量大小和变化速率的电压信号输入ECU。 l 节气门位置传感器 和踏板位置传感器类似,节气门位置传感器也是由两个无触点线性电位器传感器组成,且由ECU提供相同的基准电压。当节气门位置发生变化时,电位器阻值也随之线性地改变,由此产生相应的电压信号输入ECU,该电压信号反映节气门开度大小和变化速率。 l 节气门控制电机 节气门控制电机一般选用步进电机或直流电机,经过两级齿轮减速来调节节气门开度。早期以使用步进电机为主,步进电机精度较高、能耗低、位置保持特性较好,但其高速性能较差,不能满足节气门较高的动态响应性能的要求,所以现在比较多地采用直流电机,直流电机精度高、反应灵敏、便于伺服控制。 l 控制单元(ECU) 控制单元(ECU)是整个系统的核心,包括两部分:信息处理模块和电机驱动电路模块。信息处理模块接受来自加速踏板位置传感器的电压信号,经过处理后得到节气门的最佳开度,并把相应的电压信号发送到电机驱动电路模块。 电机驱动电路模块接受来自信息处理模块的信号,控制电机转动相应的角度,使节气门达到
电子节气门控制系统的工作原理
电子节气门控制系统的工作原理 1
上海大众斯柯达明锐轿车的电子节气门的故障检修 目录 摘要 (2) 前言 (2) 1 电子节气门概述 (2) 2 电子节气门控制系统的工作原理 (4) 2.1 加速踏板模块 (4) 2.2 节气门控制模块 (6) 2.3 发动机ECU (9) 2.2 电子节气门控制系统的控制过程 (11) 4 电子节气门的检修 (13) 4.1 节气门控制部件供电和导线的检查 (13) 4.2 加速踏板位置传感器的检查 (13) 5 故障案例分析 (14) 5.1故障现象 (14) 5.2故障诊断 (15) 5.3 故障排除 (15) 结束语 (16) 参考文献 (16)
摘要:当前大众车基本上配置有电子节气门控制(EPC)系统,其主要优点能根据驾驶人的需求及整车的行驶状况确定节气门的最佳开度,充分发挥了车辆最佳的动力性和燃油经济性,同时并具有巡行控制和牵引力控制等系列功能,提高安全性和乘坐舒。本文以上海大众斯柯达明锐轿车电子节气门为例,阐述其车型的电子节气门组成及控制原理;同时阐明了斯柯达明锐轿车电子节气门的检修方法;结合实际维修案例加以分析。 关键词:大众斯柯达明锐轿车电子节气门故障检修 前言 当前大众斯柯达明锐轿车采用电子节气门,它具有优点体现在能克服了机械油门对怠速和定速巡航进行控制的局限性,经过电控单元可对发动机全工况进行控制。而电子控制单元ECU精确控制电子节气门的开启度以满足空调、自动变速箱、平稳性动态控制、车速调节、发动机冷却等功能的需要。它是一种新的发动机负荷管理系统,能够较好地管理发动机的力矩。节气门位置根据发 1
电子节气门控制系统(ETCS)简介
反 饋 电子节气门控制系统(ETCS)简介 1. 采用ETCS后,可以省去哪些部件? A. 节气门体、减振缓冲器膜片和单向阀、ECM/PCM、快怠速阀。 B. 加速踏板位置传感器、IACV、ECM/PCM、快怠速阀。 C. 节气门体、驱动装置、IACV、快怠速阀。 D. X IACV、快怠速阀、减振缓冲器膜片和单向阀、巡航控制作动器和控制装置。 2. ETCS操纵节气门: A. 直接使用拉线操纵。 B. X 采用电机操纵。 C. 采用加速踏板位置传感器操纵。 D. 直接由加速踏板操纵。 3. 加速踏板位置传感器 。 A. 连接到节气门体上。 B. X 包含两个相同的工作回路。 C. 紧靠加速踏板上面的前围板下支架上。 D. 向ECM/PCM提供可变电阻信号,指示节气门位置。
4. 进行下面哪一种操作时要求完成怠速学习步骤? A. 更换右前车轮。 B. X 使用扫描工具或HDS清楚DTC和/或重新设置ECM/PCM。 C. 断开及/或更换加速踏板位置传感器。 D. 进行阀门调整。 5. 发生ETCS故障时,下面哪一项是正确的? A. X MIL点亮。 B. 车辆只能移动到路肩上。 C. 燃油在1200 rpm以上被切断。 D. 可以使用后备节气门拉线。 6. ECM/PCM输出一个信号__________。 A. 直接给节气门控制电机。 B. 给加速踏板位置传感器。 C. X 给驱动装置。 D. 给TPS。
7. 在维修一种在ECM/PCM中储存有DTC的系统故障后,必须在工作结束前完成什么操 作? A. 将点火开关轮回切换到ON和OFF,以擦除所储存的DTC。 B. 踩下制动踏板,转动点火开关至“ON(II)”位置,以擦除储存的DTC。 C. 踩下巡航控制按钮,转动点火开关至“ON(II)”位置,以擦除储存的DTC。 D. X 使用扫描工具或HDS擦除储存的DTC,并完成怠速学习步骤。 8. ETCS由如下部分组成:。 A. IACV、节气门体和快怠速阀。 B. 加速踏板位置传感器、IACV、ECM/PCM和快怠速阀。 C. X 节气门体、驱动装置、加速踏板位置传感器、TPS、ECM/PCM。 D. ECM/PCM、巡航控制作动器和控制装置、ACV和驱动装置。 9. 节气门控制电机的功能是什么? A. X 开启和关闭节气门体中的节气门。 B. 操纵节气门拉线,控制节气门开度。 C. 向ECM/PCM发送信号,指示燃油消耗量。 D. 节气门开启或关闭时,向驱动装置发送信号。
丰田卡罗拉电控发动机电子节气门控制原理及检修方法
摘要 (1) 前言 (2) 第一章电子节气门控制原理 (3) 第一节电子节气门国内外的研究现状 (3) 第二节电子节气门发展趋势与应用车型 (3) 1.2.1电子节气门发展趋势 (3) 第三节电子节气门控制系统的基本结构和工作原理 (4) 1.3.1电子节气门控制系统的基本结构主要包括 (4) 1.3.2电子节气门控制系统的工作原理 (4) 第四节电子节气门控制系统分类 (5) 1.4.1电液式节气门 (5) 1.4.2线性电磁铁式节气门 (5) 1.4.3步进电机式节气门 (5) 1.4.4直流伺服电机式节气门 (5) 第五节电子节气门的特点 (6) 1.5.1电子节气门的优点 (6) 1.5.2电子节气门的缺点 (6) 第六节电子节气门与传统节气门的区别 (6) 第七节丰田电控发动机电子节气门故障排除 (6) 结束语 (11) 参考文献 (12)
介绍电子节气门控制系统的结构系统与故障分析和排除,以及电子节气门基本控制结构、工作原理、及其控制策略,并且运用具体实例和多种车型来结合,通过传统的节气门的弊端指出电子节气门的优势和目前的不足之处。而在种种相比之下可以看出电子节气门的普及是势在必然的。 自21世纪以来,大部分汽车都使用电子油门替换了常规的拉线油门。电子油门通过油门踏板深浅来控制电子信号发出指令使得引擎提供与之匹配的动力。电子节气门,亦称为电子驱动节气门。 关键词:电子节气门控制原理典型故障检修方法
电子节气门在操控技术中是相对容易实现产品化同时具备发展前景的。传统发动机节气门操纵机构采用机械连接方式,应用范畴受到限制并且缺乏精确性。电子节气门通过传感器、微处理器和执行器对节气门进行控制,反应更灵敏,控制更精确,结构简单,非常可靠。 电子节气门可以设置各种功能或与其它控制系统ECU通讯来改善驾驶的安全性和舒适性。电子节气门是多种新一代汽车电子控制系统的基础,常见的例如定速巡航控制系统和驱动防滑系统等,并为汽车上的集中控制提供基础。
电子节气门控制系统硬件电路的设计
电子节气门控制系统硬件电路的设计 【摘要】介绍了电子节气门控制系统的基本原理,对控制系统涉及的电源模块、角传感器信号处理、A/D转换、执行控制模块和H桥电动机驱动等部分的电路进行了分析和设计,为电子节气门控制系统总成的设计提供了硬件支持。 【关键词】缸内直喷;电控系统;硬件模块 一、引言 电子节气门控制系统是发动机电子控制系统的重要组成部分,能够显著改善汽车的动力性能、经济性能和安全性能等指标,是汽车电子控制技术发展的重要方向。鉴于当前国内电子节气门控制系统研究和应用的现状,开展电子节气门控制系统的研究与开发具有重要现实意义和应用价值。 电子节气门控制系统根据油门踏板位置传感器和节气门体角位移信号等综合判断发动机实时工况的需求,通过电控单元控制节气门阀的开度,改变进入发动机气缸内的可燃混合气量,使发动机输出整车所需求的功率和转矩。 图1 源稳压电路图 二、电源模块电路设计 电源模块主要为电控单元、传感器和直流电动机提供电源。其中由于传感器电路精度比较高,节气门位置传感器和踏板位置传感器输入的模拟信号供电电压必须非常稳定,否则对踏板位置传感器和节气门位置传感器信号会有很大的扰动,本设计中给传感器单独供电,电控单元5V供电电源与传感器SV供电电源分开。本设计共需两个5V和一个12V直流电源。其中5V电源由两个电压转换器件7805从12V直流电源直接转化得到。 直流电机所需12V直流电源直接从12V蓄电池得到。图1所示为系统采用电源稳压电路图,主要由电源稳压芯片7805组成。 三、角位移信号调理电路 角位移信号调理电路是电控系统的重要组成部分,主要完成信号的跟随和滤波。信号调理可以防止各种干扰信号进入系统,是整个系统抗干扰的重点部分。 电子节气门控制系统信号输入部分包含两路模拟量输入,油门踏板角位移信号和节气门角位移信号。两路传感器信号均为电压信号,其范围为O-5V,数模转换芯片AD7705输入模拟电压范围为0-2.5V,故设计分压电路对传感器信号进
电子节气门工作原理
电子节气门工作原理 节气门是当今电喷车发动机系统最重要的部件,他的上部是空气滤清器,下部是发动机缸体,是汽车发动机的咽喉。 在电子节气门控制系统中,不采用常规的与加速踏板相连的机械控制系统,该控制系统采用的是飞机上使用的有线操纵(Fly-by-wire)技术,此项技术目前在汽车上的应用很少,只有在一些概念车上会用该项技术。 电子节气门系统的基本结构有以下几个部分组成: 1、发动机 2、转速传感器 3、节气门位置传感器 4、节气门执行器 5、节气门 6、加速踏板位置传感器 7、车速传感器 8、变速器 9、加速踏板 10、节气门电子控制单元(ECU)、 其中转速传感器也可以用曲轴位置传感器或者凸轮轴位置传感器来代替;节气门执行器是一个步进电机,由它来推动节气门以控制节气门的开度;加速踏板位置传感器的构造及工作原理和节气门位置传感器的构造及工作原理是一样的;节气门电子控制单元一般是和发动机电子控制单元做在一起的。 电子节气门控制系统的工作原理如上图所示。加速踏板位置传感器(6)将司机需要加速或减速的信息传递给节气门电子控制单元(10),ECU 根据得到的信息,计算出相应的最佳节气门位置,发出控制信号给节气门执行器(4),由节气门执行器将节气门开到计算出的最佳节气门的开度位置。ECU 通过与其它电子控制单元(如发动机电子控制单元,自动变速器电子控制单元等)进行通讯,ECU 根据得到的节气门位置传感器(3)信息、发动机转速传感器(2)信号、车速传感器(7)的信息对节气门的最佳位置进行不断的修正,使节气门的开度达到司机所需要的理想位置。电子节气门控制系统的最大优点是可以实现发动机全范围的最佳扭矩的输出。
加速踏板工作原理及控制方式
加速踏板工作原理及控制方式 加速踏板也就是我们常说的油门,传统拉线油门是通过钢丝一端与油门踏板相连另一端与节气门相连,它的传输比例是1:1的,也就是说我们用脚踩多少,节气门的打开角度就是多少,但是在很多情况下,节气阀并不应该打开这么大的角度,所以此时节气阀打开的角度并不一定是最科学的,这种方式虽然很直接但它的控制精度很差。而电子油门它是通过电缆或线束来控制节气门的开度,从表面看是用电缆取代了传统的油门拉线但实质上不仅仅是简单的改变连接方式,而是能对整个车辆的动力输出实现自动控制功能。 当驾驶员需要加速时踩下油门,踏板位置传感器就将感知的信号通过电缆传递给ECU,ECU经过分析、判断,并发出指令给驱动电机,并由驱动电机控制节气门的开度,以调整可燃混合气的流量,在大负荷时,节气门开口大,进入气缸内的可燃混合气多,如果使用拉线油门只能靠脚踩油门踏板的深浅来控制节气门的开度,很难将节气门的开口角度调到能达到理论空燃比状态,而电子油门能通过ECU将传感器采集的各种数据进行分析、比对,并发出指令让节气门执行机构动作,将节气门调到最佳位置,以实现不同负荷和工况下都能接近于14.7:1的理论空燃比状态,使燃料能充分燃烧。
电子油门控制系统主要由油门踏板、踏板位移传感器、ECU(电控单元)、数据总线、伺服电动机和节气门执行机构组成。位移传感器安装在油门踏板内部,随时监测油门踏板的位置。当监测到油门踏板高度位置有变化,会瞬间将此信息送往ECU,ECU对该信息和其它系统传来的数据信息进行运算处理,计算出一个控制信号,通过线路送到伺服电动机继电器,伺服电动机驱动节气门执行机构,数据总线则是负责系统ECU与其它ECU之间的通讯。由于电子油门系统是通过ECU来调整节气门的,因此电子油门系统可以设置各种功能来改善驾驶的安全性和舒适性,其中最常见的就是ASR(牵引力控制系统)和速度控制系统(巡航控制)。 说本质上拉线油门就是用机械直接控制节气门工作而电子油门是先给电脑传输一个信号然后电脑再控制节气门工作。拉线油门的优点是油门响应快但是不够省油电子油门反应稍显 迟缓但能获得更好的节油效果。 不管RAV4的加速踏板工作原理是哪一种(召回网编者注:本次召回涉及的RAV4车辆采用的是电子油门),其中一个事实就是:加速踏板在工作之后可能会无法回位,这就意味着驾驶员在操作过程中会出现一直加速的情况,这是存在着极大的安全隐患的,希望各位车主能尽快将自己的车辆按照召回的路径进行处理。
电子油门控制系统概述
3电子油门控制系统 3.1电子油门控制系统的工作原理 当监测到油门踏板高度位置有变化,会瞬间将此信息送往ECU,ECU对该信息和其它系统传来的数据信息进行运算处理,计算出一个控制信号,通过线路送到伺服电动机继电器,伺服电动机驱动节气门执行机构,数据总线则是负责系统ECU与其它ECU 之间的通讯。由于电子油门系统是通过ECU来调整节气门的,因此电子油门系统可以设置各种功能来改善驾驶的安全性和舒适性,其中最常见的就是ASR(牵引力控制系统)和速度控制系统(巡航控制)。电子油门当ASR系统传感到车轮的旋转速度,ECU就根据油门踏板的位置、车轮速度和方向盘转向角度等之间的不同而求出滑动率,通过减少节气门开度来调整混合气流量,以降低发动机功率来达到控制目的。而在ASR系统中,电子油门起到十分关键的作用,它涉及整个ASR系统中对车速控制、怠速控制等功能,使系统能迅速准确地执行指令。即当电子油门系统接受到ASR系统指令时,它对节气门控制指令只来自于ASR,这样就可以避免驾车者的误操作。 当驾车者使用速度控制系统时,车速传感器将车速信号输入ECU,再由ECU输出指令伺服电动机控制节气门开度。在这样的系统中,根据行驶阻力的变化由控制系统自动调节发动机节气门开
度,使行驶车速保持稳定。因此电子油门系统也可以兼容巡航控制功能。在目前的电子燃油喷射发动机上,电子油门除了发进一步改善发动机的节油和排放性能,因为它控制着发动机动力调节的大门。因此,电子油门可以发挥的作用是很多的。挥上述功能外,它还可以进一步改善发动机的节油和排放性能,因为它控制着发动机动力调节的大门。因此,电子油门可以发挥的作用是很多的。 油门作为汽车上不可缺少的重要部件,直接影响着汽车的安全性能。自21世纪以来,大部分汽车都使用电子油门替换了常规的拉线油门。与老式的拉线油门相比,电子油门通过油门踏板深浅来控制电子信号发出指令,使得引擎提供与之匹配的动力,它最大的特点就是能通过ECU控制节气阀开度。当油门踏板位置发生改变时,电子油门输出的信号可以作为衡量电子油门自动控制精确度的依据,电子油门检测系统就是依据这些实时信号,采用各种方案来评测电子油门的质量和可靠性,实现其性能检测。