棘轮画法
棘轮机构
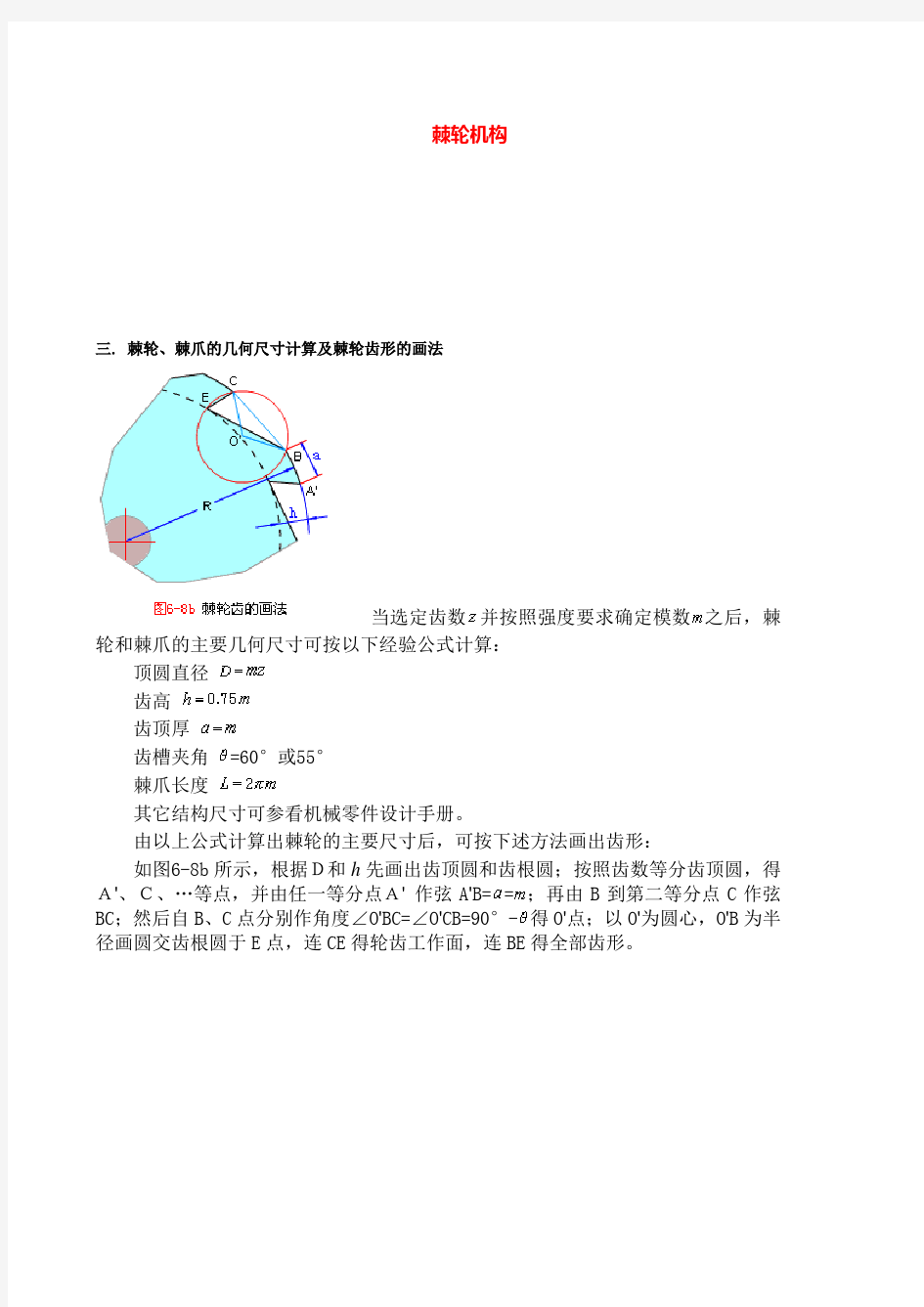
三. 棘轮、棘爪的几何尺寸计算及棘轮齿形的画法
当选定齿数并按照强度要求确定模数之后,棘轮和棘爪的主要几何尺寸可按以下经验公式计算:
顶圆直径
齿高
齿顶厚
齿槽夹角=60°或55°
棘爪长度
其它结构尺寸可参看机械零件设计手册。
由以上公式计算出棘轮的主要尺寸后,可按下述方法画出齿形:
如图6-8b所示,根据D和h先画出齿顶圆和齿根圆;按照齿数等分齿顶圆,得A'、C、…等点,并由任一等分点A'作弦A'B==;再由B到第二等分点C作弦BC;然后自B、C点分别作角度∠O'BC=∠O'CB=90°-得O'点;以O'为圆心,O'B为半径画圆交齿根圆于E点,连CE得轮齿工作面,连BE得全部齿形。
机构传动方案设计
机构传动方案设计 设计方案要发散思维,参考资料文献关于机构传动方案设计知道怎么做吗?下面是小编为大家整理了机构传动方案设计,希望能帮到大家! 这种方法是从具有相同运动特性的机构中,按照执行构件所需的运动特性进行搜寻。当有多种机构均可满足所需要求时,则可根据上节所述原则,对初选的机构形式进行分析和比较,从中选择出较优的机构。 常见运动特性及其对应机构 连续转动定传动比匀速平行四杆机构、双万向联轴节机构、齿轮机构、轮系、谐波传动机构、摆线针轮机构、摩擦轮传动机构、挠性传动机构等变传动比匀速轴向滑移圆柱齿轮机构、混合轮系变速机构、摩擦传动机构、行星无级变速机构、挠性无级变速机构等非匀速双曲柄机构、转动导杆机构、单万向连轴节机构、非圆齿轮机构、某些组合机构等往复运动往复移动曲柄滑块机构、移动导杆机构、正弦机构、移动从动件凸轮机构、齿轮齿条机构、楔块机构、螺旋机构、气动、液压机构等往复摆动曲柄摇杆机构、双摇杆机构、摆动导杆机构、曲柄摇块机构、空间连杆机构、摆动从动件凸轮机构、某些组合机构等
间歇运动间歇转动棘轮机构、槽轮机构、不完全齿轮机构、凸轮式间歇运动机构、某些组合机构等间歇摆动特殊形式的连杆机构、摆动从动件凸轮机构、齿轮-连杆组合机构、利用连杆曲线圆弧段或直线段组成的多杆机构等间歇移动棘齿条机构、摩擦传动机构、从动件作间歇往复运动的凸轮机构、反凸轮机构、气动、液压机构、移动杆有停歇的斜面机构等预定轨迹直线轨迹连杆近似直线机构、八杆精确直线机构、某些组合机构等曲线轨迹利用连杆曲线实现预定轨迹的多杆机构、凸轮-连杆组合机构、行星轮系与连杆组合机构等特殊运动要求换向双向式棘轮机构、定轴轮系等超越齿式棘轮机构、摩擦式棘轮机构等过载保护带传动机构、摩擦传动机构等…………利用这种方法进行机构选型,方便、直观。设计者只需根据给定工艺动作的运动特性,从有关手册中查阅相应的机构即可,故使用普遍。 任何一个复杂的执行机构都可以认为是由一些基本机构组成的,这些基本机构具有下图所示的进行运动变换和传递动力的基本功能。
棘轮机构设计举例(全)
请高手指点QQ 906468771 棘轮机构 科技名词定义 中文名称:棘轮机构 英文名称:ratchet mechanism 定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。 所属学科:机械工程(一级学科);机构学(二级学科);其他机构(三级学科)本内容由全国科学技术名词审定委员会审定公布 棘轮机构示意图 棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向间歇运动机构。棘轮机构常用在各种机床和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。 棘轮机构简介 棘轮机构将连续转动或往复运动转换成单向步进运动。 棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。为了确保棘轮不反转,常在固定构件上加装止逆棘爪。摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和摆动油缸等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。棘轮每次转过的角度称为动程。动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以
在运转过程中加以调节。如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。 一棘轮机构(ratchet mechanism)的基本型式和工作原理 图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。 2 棘轮机构的分类方式有以下几种: 按结构形式分为齿式棘轮机构和摩擦式棘轮机构 齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。该机构的缺点是动程只能作有级调节;噪音、冲击和磨损较大,故不宜用于高速。
棘轮机构练习题
棘轮机构练习题 一,填空题 1,将主动件的连续运动转换为时动时停的周期性运动的机构,称为间歇动动机构 2,棘轮机构主要由棘轮、棘爪和机架组成 3,槽轮机构的主动件是曲柄,它以等角速度做整周运动,具有径向槽的槽轮是 从动件,由它来完成间歇运动。 4,为保证棘轮在工作中的静止可靠和防止棘轮的反转,棘轮机构应当装有止回棘爪. 5、单圆销外啮合六槽轮机构,曲柄转一周需6秒,则槽轮每次运动转 60 度,每次停歇 5 秒。 6,在间歇运动机构中能将主动件的连续转动变成从动件的间歇转动的是_棘轮机构_和_ 槽轮机构_。 7,单圆销外啮槽轮机构,它是由曲柄_圆柱销_、_带径向槽的槽轮_以及机架等组成。 8,槽轮机构能把主动件的_连续_转动转换为从动件周期性的_间歇_运动。 9、有一双圆销槽轮机构,其槽轮有6条径向槽,当主动件拨盘转二圈时,槽轮完成_4_ 次动作,转过240 度。 10,在槽轮机构中,要使主、从动件转向相同,应采用_内啮合_槽轮机构。 二,判断题 1,间歇齿轮机构是由齿轮传动演变而来的,所以齿轮传动的传动比计算方法同样适用于间 歇齿轮机构。(×) 2,内啮合槽机构中槽轮的旋转方向与曲柄的旋转方向是一致的,而外啮合槽轮机构则相反。 (√) 3,槽轮机构中槽轮的转角大小是可以调节的(×) 4,槽轮机构的停歇和运动时间取决于槽轮的槽数和圆柱拨销数(√) 5,凸轮机构、棘轮机构、槽轮机构都不能实现间歇运动。× 6,单向间歇运动的棘轮机构,必须要有止回棘爪。(√) 三,选择题 1、六角车床的刀架转位机构是采用的( C) A,凸轮机构B,棘轮机构C,槽轮机构D,齿轮机构 2.拨盘转一周,槽轮作一次反向间歇转动的槽轮机构是__A__槽轮机构。 A.单圆销外啮合B.双圆销外啮合C.单圆销内啮合 3,某单圆销六槽外啮合槽轮机构,若主动件曲柄转一周,则槽轮转( C)周 A,1 B,1/4 C,1/6 D,1/8 4,槽轮机构的主动件在工作中做( C) A,往复摆动运动B,往复直线运动C,等速转动D,直线运动
棘轮机构设计举例全
棘轮机构设计举例全 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
请高手指点 棘轮机构 科技名词定义 中文名称:棘轮机构 英文名称:ratchet mechanism 定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。 所属学科:(一级学科);(二级学科);其他机构(三级学科) 本内容由审定公布 棘轮机构示意图 棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向。棘轮机构常用在各种和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。 棘轮机构简介 棘轮机构将连续转动或往复运动转换成单向步进运动。 棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑
过,棘轮停止转动。为了确保棘轮不反转,常在上加装止逆棘爪。摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。棘轮每次转过的角度称为动程。动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。 一棘轮机构(ratchet mechanism)的基本型式和工作原理 图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。 2 棘轮机构的分类方式有以下几种: 按结构形式分为齿式棘轮机构和摩擦式棘轮机构 齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。该机构的缺点是动程只能作有级调节;噪音、冲击和磨损较大,故不宜用于高速。
朱明zhubob机械设计基础第四章四杠机构、凸轮及棘轮习题答案
第四章 1.构件和零件有何不同? 构件是运动的基本单元,而零件是制造的基本单元。一个构件中可以包含多个固联在一起的零件,一个单独的零件可以是一个最简单的构件。 2.试述四杆机构中曲柄、摇杆、连杆和机架的特性。 曲柄:连架杆中,能作整周回转的杆件称为曲柄;摇杆:连架杆中,只能作往复摆动的杆件称为摇杆;机架:机构中固定不动的构件。 3.简要总结四杆机构中曲柄存在的条件。 (1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和。 (2)连架杆和机架中必有一个是最短杆。 4.在四杆机构中满足什么条件可以组成曲柄摇杆机构、双曲柄机构和双摇杆机构? 以与最短杆相邻的杆件为机架,均为曲柄摇杆机构。 以最短杆为机架,为双曲柄机构。 以与最短杆相对的杆件为机架,为双摇杆机构。 5.什么是“死点”?在什么情况下发生?“死点”与“自锁”有何区别? 机构中从动件与连杆共线的位置称为机构的死点位置.机构之所以出现死点,是因为原动件是作往复运动的构件,导致机构一定出现连杆与从动件共线.自锁是机械在给定方向的驱动力作用下,由于摩擦原因无论驱动力多大都不能使机械运动的现象。当机构处于死点位置时,从动件将发生自锁,出现卡死现象;或受到突然外力的影响,从动件则会出现运动方向不确定现象。 6.什么是连杆机构的急回特性,什么是极位夹角,二者有何联系? 主动件做等带速运动,从动件空回行程平均速度大于工作行程平均速度的特性,称为连杆机构的急回特性。主动件为曲柄而从动件有极限位置的平面连杆机构,其极位夹角θ为曲柄的回程运动角2?的补角平面连杆机构有无急回特性取决于有无极位夹角,θ = 0,则机构没有急回特性。而机构急回运动的程度取决于极位夹角θ的大小,θ越大,K 越大,机构的急回特性越显著。 7.某四杆机构如图4-101所示,各杆尺寸为AB = 150 mm 、BC = 240 mm 、CD = 400 mm 、DA = 500 mm ,问:(1)该机构属何种类型?(2)写出AB 、BC 、CD 、DA 四杆的名称。 A B C D 150 240 400 500 mm 图4-101 双摇杆机构 AB 连杆 BC 、DA 连架杆 CD 机架 8.试述凸轮机构的组成、分类及其在机构中的作用。 凸轮机构由凸轮、从动件和机架这3个基本构件及锁合装置(如弹簧等)组成,是一种高副
棘轮型手动压机设计
棘轮型手动压力机的设计 1 引言 1.1课题研究的目的及意义 机械设计是机械工业的基础技术。科研成果要转变成有竞争里的新产品,设计起着关键性的作用。设计工作的质量和水平,直接关系到产品的质量、性能和技术经济效益。工业发达的国家都十分重视机械设计工作,依靠先进的技术和数字化的电控部件不断的研制出适应市场需求的机电产品,有力的促进全球经济的蓬勃发展。机械工业的水平是一个国家现代化建设水平的主要标志之一。人们之所以要广泛使用机器是由于机器既能承担人力所不能或不便进行的工作,又能较人工生产改进产品的质量,能够大大提高劳动生产率和改善劳动条件。 手动压力机是机械压力机中具有代表性的一类加工设备,该类设备结构坚固,提高生产效率,且具有操作方便、动作灵活,经久耐用等特点。它广泛应用于家电业、电子工业、电器端子、钟表工业、照相机、微型马达等制造及零部件装配,最适用小零部件之压入、成型、装配、铆合、打印、冲孔、切断、弯曲、印花等工作要求。它的用户几乎包罗了国民经济各部门,量大面宽。现在我国经济建设蓬勃发展,压力机的使用从大型工厂到私人手工作坊,几乎在涉及到零件冷压工艺的地方都可以见到。压力机种类繁多,型式多样,工作压力小到几十公斤,大到几吨。 我国许多企业自“八五” 以来,通过技术攻关、自行设计,以及从德国舒勒、美国维尔森、日本小松等著名公司引进设计制造技术,或采取与国外厂商合作生产的方式,将国内压力机的技术水平提升到了国际先进水平。目前国内生产的一些大型机械压力机及其生产线已跨出国门,走向世界。小型手动压力机虽然刚度差,降低了模具寿命和制件质量。但是它成本低、操作方便,容易安装机械化装置。并且由于手动压力机总体处于质量稳定、大批量廉价市售状态,由国情决定,其市场需求量仍将保持在一个较高的水平。 这次所设计的棘轮式手动压力机属于中小型压力机,其中主要以人力为主,通过齿轮带动齿条运动,用棘轮实现自锁,用手轮回复齿条,其中主要设计了各个系统传动的零部件,结构比较简单,属于典型的手动压力机。
棘轮机构设计举例全
请高手指点 棘轮机构 科技名词定义 中文名称:棘轮机构 英文名称:ratchet mechanism 定义:含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。 所属学科:(一级学科);(二级学科);其他机构(三级学科) 本内容由审定公布 棘轮机构示意图 棘轮机构(ratchet and pawl),由棘轮和棘爪组成的一种单向。棘轮机构常用在各种和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。 棘轮机构简介 棘轮机构将连续转动或往复运动转换成单向步进运动。 棘轮轮齿通常用单向齿,棘爪铰接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。为了确保棘轮不反转,常在上加装止逆棘爪。摇杆的往复摆动可由曲柄摇杆机构、齿轮机构和等实现,在传递很小动力时,也有用电磁铁直接驱动棘爪的。棘轮每次转过的角度称为动程。动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。 一棘轮机构(ratchet mechanism)的基本型式和工作原理 图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪,棘轮、止回棘爪和机架组成。主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转动时,止回棘爪阻止棘轮
棘轮手动压机设计开题报告
毕业设计(论文)开题报告题目棘轮手动压机设计 专业名称 班级学号 学生姓名 指导教师 填表日期年月日
说明 开题报告应结合自己课题而作,一般包括:课题依据及课题的意义、国内外研究概况及发展趋势(含文献综述)、研究内容及实验方案、目标、主要特色及工作进度、参考文献等内容。以下填写内容各专业可根据具体情况适当修改。但每个专业填写内容应保持一致。
一、选题的依据及意义: 毕业设计(论文)选题的原则要根据教学计划中所制定的培养目标要求,能达到综合训练为目的,有利于培养学生独立工作能力,巩固和提高所学知识。应尽量选择既满足教学基本要求,又结合生产、科研实际的题目。可根据学生的特点,结合个人的实际工作选择题目。机械产品设计类型依据特点分为开发型、改进型、技术引进等三种类型。机械产品设计要求具有有效性、经济性、工艺性和外观质量。 题目类型 主要包括:机械设计类、工艺工装设计类、机电产品设计、液压系统及装置设计、电气控制系统设计等。(所有专业课程的内容,结合生产实际都行) 题目示例60吨压力机液压系统与控制系统设计 压力机机械结构设计,液压系统设计,控制系统设计。 由于我国压力机技术相比国外落后点,大型的压力机和用于数控的比较欠缺,作为在校大学生,我就选棘轮式手动压力机。手动压力机制造简单,操作方便,造价费用低廉。在更多的方面大型的压力机起不到作用。所以选棘轮式的是对棘轮机构有所掌握。 依据: (1)体现我国机械加工中冷压工艺的实际发展需要 直接面向我国机械加工的当前实际,考虑今后发展趋向;压力机在制造领域和应用领域的重要地位,努力实现标准化与自动化。 (2)满足毕业设计的内容规定要求 机械专业毕业设计内容包含初步设计和技术设计两大部分。毕业设计不是相关课程设计内容的简单组合与重复,否则将对完成基本训练和培养独立工作能力极为不利。设计题目具有较完整的设计原始资料,包括所要设计的设备的原始数据(工作压力、底座尺寸、压力机高度、最大工作行程等)相关使用要求、运动分析、总体强度受力分析、齿条工艺规程设计、成本核算等,这些原始资料都来自实有机械设备的设计实践。 (3)适应专业科技知识的实际水平 由于学时有限,在校所学专业课程知识的深、广度难以满足中型、大型设备设计
棘轮设计举例说明
棘轮的设计 大家可以按照下面的步骤来进行设计,实际问题再实际分析!!!! (1)棘轮的设计 棘轮的齿数,如果系手摇绞车所用,大约为8~16齿 的程度。本设计取z=14。 作为中间轴的力矩,为制动器之项的回转力矩 Mt = (作用於制动轮的回转力)x(制动轮的半径) = TxRB T=258kg RB=12.5cm 代入 Mt=258x12.5=3225kgcm p=3.75*( Mt/(z*sb*K))0.333以上记之值代入 z=14 sb=300kg/cm2 K=(0.5~1.0) 取0.8 P=3.75(3225/14/300/0.8)0.333=36mm 模数m = p/p = 36/3.14 ≒11.46 ≒12 m = 12 p = m*p = 12 x 3.14 ≒37.7mm 齿的高度h = 0.35p = 0.35x37.7 = 13.195mm = 14mm 齿尖的厚度c = 0.25p = 0.25x37.7 = 9.42 = 10mm 棘轮的外接直径D = m*z = 12x14 = 168mm 棘轮的宽度b = K*P = 0.8*37.7 = 30.16mm = 30mm 掣子的角度a=15° 对棘轮的压力的压溃强度 由sc = T/(bh),T= 2Mt/D之值代入 Mt= 3225kgcm D= 16.8cm b = 3cm h = 1.4cm sc= 3225x2/16.8/3/1.4 =91.4kg/cm2=0.914kg/mm2 容许压应力的范围0.5~1.0kg/mm2,所以上记之值在此 范围内不会因受压缩而压溃 (2)掣子轴的设计 掣子轴的直径为d 在掣子轴发生弯曲力作用,故其弯曲
棘轮机构基础知识
棘轮机构基础知识 一棘轮机构(ratchet mechanism)的基本型式和工作原理 图示为机械中常用的外啮合式棘轮机构,它由主动摆杆,棘爪, 棘轮、止回棘爪和机架组成。主动件空套在与棘轮固连的从动 轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动 时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度, 此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转 动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却 能够在棘轮齿背上滑过,所以,这时棘轮静止不动。因此,当 主动件作连续的往复摆动时,棘轮作单向的间歇运动。 2 棘轮机构的分类方式有以下几种: (1)按结构形式分为齿式棘轮机构和摩擦式棘轮机构 齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。该机构的缺点是动程只能作有级调节;噪音、冲击和磨损较大,故不宜用于高速。 齿式棘轮机构摩擦式棘轮机构 摩擦式棘轮机构是用偏心扇形楔块代替齿式棘轮机构中的棘爪,以无齿摩擦代替棘轮。特点是传动平稳、无噪音;动程可无级调节。但因靠摩擦力传动,会出现打滑现象,虽然可起到安全保护作用,但是传动精度不高。适用于低速轻载的场合。 (2)按啮合方式分外啮合棘轮机构和内啮合棘轮机构 外啮合式棘轮机构的棘爪或楔块均安装在棘轮的外部,而内啮合棘轮机构的棘爪或楔块均在棘轮内部。外啮合式棘轮机构由于加工、安装和维修方便,应用较广。内啮合棘轮机构的特点是结构紧凑,外形尺寸小。
外啮合式棘轮机构内啮合式棘轮机构 (3)按从动件运动形式分单动式棘轮机构、双动 式棘轮机构和双向式棘轮机构 单动式式棘轮机构当主动件按某一个方向摆动 时,才能推动棘轮转动。双动式棘轮机构,在主 动摇杆向两个方向往复摆动的过程中,分别带动 两个棘爪,两次推动棘轮转动。 双动式棘轮机构常用于载荷较大,棘轮尺寸受限, 齿数较少,而主动摆杆的摆角小于棘轮齿距的场 合。 双动式棘轮机构 以上介绍的棘轮机构,都只能按一个方向作单向间歇运动。双向式棘轮机构可通过改变棘爪的摆动方向,实现棘轮两个方向的转动。图示为两种双向式棘轮机构的形式,双向式棘轮机构必须采用对称齿形。 双向式棘轮机构
棘轮设计
名称符号计算公式 ρ=πm1、1.5、2、2.5、3、3.5、4、5、6、7、8、10、模数m 12、14、16、18、20mm 棘轮齿高h一般取h=0.75m 棘轮齿顶厚a一般取a=m 棘轮齿顶圆直径da da=mz 棘轮根圆直径df df=da-2h=da-1.5m 棘轮齿槽夹角θθ=60o或θ=55o(视铣刀角度而定) 棘轮齿槽圆角半径r 一般取r=1.5mm 棘轮厚度 b 铸钢b=1.5-4mm;锻钢b=1~2mm 棘爪工作长度l l=2p=2πm 棘爪高度h1m≤2.5时,h1=h+(2~3)mm;m=3~5时h1=(1.2~1.7)m 棘爪尖顶圆角半径r1一般取r1=2mm 棘爪底长度a1a1=(0.8~1)m 棘轮机构的设计 1.棘轮与棘爪的轴心位置 在棘轮机构工作时,棘爪给棘轮轮齿的作用力沿A方向(视棘爪为二力构件),在相同推力的情况下,为了能使棘2.棘轮的齿面偏斜角α,棘爪进入棘轮的齿槽时在A点处开始接触,此时棘爪上受到棘轮齿面法向反力N和摩擦力Ff的作用。为了使棘爪能顺利地进入齿槽底部,通常将棘轮齿面做成 与半径02A成一定的夹角α,这一偏斜角称棘轮的齿面偏斜角,一般取α=lO°~l 5°。3.棘
轮机构的主要参数 (1).棘轮齿数z根据工作要求选定。轻载时齿数可取得多些,可达250齿;载荷较大时,齿数取少些,通常取z=8~30。例如牛头刨床横向进给机构中的丝杠,其导程L=6mm,要求最小进给量为0.2mm,若棘爪每次拨过一个齿,则棘轮的最小转角为: 所以棘轮的最少齿数z=360o/12o=30。 (2).棘轮齿距ρ相邻两齿齿顶圆周上对应点间的弧长,mm (3).棘轮模数m棘轮齿距ρ与π之比,即ρ=πm。 (4).齿顶圆直径da齿顶圆直径可由公式da=mz求得。 齿数z和模数m确定后,棘轮机构的其他几何尺寸,可由公式算出
棘轮机构教案
棘轮机构 教学目的:掌握棘轮机构的结构组成和工作原理; 掌握棘轮机构的类型和特点; 了解棘轮机构的应用。 教学重点:棘轮机构的结构组成和工作原理 教学难点:棘轮机构的类型和特点 新课教法选择:实物演示小组讨论 教学内容: 一、棘轮机构的工作原理 1、机构组成 主要有摇杆、棘爪、棘轮、制动爪和机架组成。弹簧使制动爪和棘轮保持接触。 2、工作过程 摇杆逆时针摆动——棘爪插入齿槽——棘轮转过角度——制动爪划过齿背摇杆顺时针摆动——棘爪划过脊背——制动爪组织棘轮作顺时针转动——棘轮静止不动 因此当摇杆作连续的往复摆动时,棘轮将作单向间歇转动。 二、棘轮机构的类型及特点 1、按结构形式分 ①齿式棘轮机构
轮齿式棘轮机构结构简单,易于制造,运动可靠,从动棘轮转角容易实现有级调整,但棘爪在齿面滑过引起噪声与冲击,在高速时尤为严重。故常于低速、轻载的场合用作间歇运动控制。 ②摩擦式棘轮机构 摩擦式棘轮机构传递运动较平稳,无噪音,从动件的转角可作无级调整。但难以避免打滑现象,因而运动准确性较差,不适合用于精确传递运动的场合 2、按从动件运动形式分 ①单动式棘轮机构 单动式棘轮机构的特点是摆杆向一个方向摆动时,棘轮沿同一方向转过某一角度;而摆杆向另一个方向摆动时,棘轮静止不动。 ②双动式棘轮机构 双动式棘轮机构,摆杆的往复摆动,都能使棘轮沿单一方向转动,棘轮转动方向是不可改变的。 ③双向式棘轮机构 若将棘轮轮齿做成短梯形或矩形时,变动棘爪的放置位置或方向后,可改变棘轮的转动方向。棘轮在正、反两个转动方向上都可实现间歇转动。 三、棘轮机构的特点与应用 1、结构简单,制造容易运动可靠 2、棘轮的转角在很大范围内可调 3、工作时有较大的冲击和噪声、运动精度不高,常用于低速场合 4、棘轮机构还常用作防止机构逆转的停止器 四、棘轮转角的调节 1、用遮板调节棘轮转角 2、调节摇杆摆动角度的大小,控制棘轮的转角 五、棘轮机构的应用 应用:在各类机床中实现进给、转位、或分度。
常用步进传动机构设计
习题与参考答案 一、复习思考题 1.什么是间歇运动?有哪些机构能实现间歇运动? 2.棘轮机构与槽轮机构都是间歇运动机构,它们各有什么特点? 3.槽轮机构的运动系数τ=0.4表示什么意义?为什么运动系数必须大于零而小于1? 五个槽的单销槽轮机构其运动系数τ等于多少? 4.棘轮机构的运动设计主要包括哪些内容? 5.槽轮机构设计时要避免什么问题? 6.棘轮机构和槽轮机构均可用来实现从动轴的单向间歇运动,但在具体的使用选择上又有什么不同? 7.止回棘爪的作用是什么? 8.调节棘轮转角大小都有哪些方法? 9.用什么方法能改变棘轮的转向? 10.槽轮的静止可靠性和防止反转是怎样保证的? 11.单向运动棘轮机构和双向式棘轮机构,有什么不同之处? 12.棘轮机构有哪些作用? 二、填空题 1.所谓间歇运动机构,就是在主动件作运动时,从动件能够产生周期性的、运动的机构。 2.棘轮机构主要由、和等构件组成。 3.棘轮机构的主动件是,从动件是,机架起固定和支撑作用。 4.棘轮机构的主动件作运动,从动件作性的时停、时动的间歇运动。 5.双向作用的棘轮,它的齿槽是的,一般单向运动的棘轮齿槽是的。 6.为保证棘轮在工作中的可靠和防止棘轮的,棘轮机构应当装有止回棘爪。 7.槽轮机构主要由、、和机架等构件组成。 8.槽轮机构的主动件是,它以等速作运动,具有槽的槽轮是从动件,由它来完成间歇运动。 9.槽轮的静止可靠性和不能反转,是通过槽轮与曲柄的实现的。 10.不论是外啮合还是内啮合的槽轮机构,总是从动件,总是主动件。 11.间歇齿轮机构是由演变来的。 12.间歇齿轮机构从动件的静止可靠性,是通过而实现的。 13.间歇齿轮机构在传动中,存在着严重的,所以只能用在低速和轻载的场合。
棘轮
产品及安装示意图. 图一:棘轮下锚补偿
(a) (b) 图二:承力索下锚棘轮底座(a)和接触线下锚棘轮底座(b)
图三:棘轮补偿装置 三、技术条件 1、棘轮下锚底座 1)本零件用于正线GHT240型H型钢柱上安装接触线(承力索)棘轮下锚。 2)本零件承受的工作荷重≥27.5kN ,破坏荷重不小于82.5kN. 3)螺母的紧固力矩按TB/T2073. 4)棘轮下锚底座采用牌号为Q235A的碳素结构钢,表面热浸镀锌防腐,技 术要求应符合TB/T2073中的镀锌标准. 2、坠陀限制架 1)本零件用于在H型钢柱上预留孔内安装承力索,接触线下锚时限制坠 陀动作. 2)安装时应调整坠陀限制架中限制导管在活动孔的位置,保证坠陀抱箍 在限制导管上自由上下移动. 3)螺母的紧固力矩按TB/T2073. 4)坠陀限制架采用牌号为Q235A的碳素结构钢,表面热浸镀锌防腐,技术 要求应符合TB/T2073中的镀锌标准. 3、棘轮装置 3.1性能
1)最大补偿张力;30kN; 2)棘轮制动时间不超过200ms 3)坠砣下落距离不大于150mm 4)各部分零件的拉伸破坏荷重不小于100kN。 5)浸沥青镀锌钢丝绳的整绳破断拉力不小于75.4kN 6)传动效率:补偿坠砣上升时不小于97%;补偿坠砣下降时不小于97%。 7)补偿装置的耐疲劳次数:不小于20000次 8)传动比:1:3 9)补偿棘轮零件部件齐全配套,装卸灵活。工作时棘轮支架与补偿 绳之间无相互摩擦、偏斜、摆动等。 3.2 材料 1)棘轮本体体采用铝合金ZL114A,抗拉强度σb≥290MPa,延伸率δ≥2%, 合金状态为T5。 2)棘轮支架、棘轮制动架采用牌号为Q235B的碳素结构钢,表面热浸镀 锌防腐,技术要求应符合TB/T2073中2级镀锌标准。 3)补偿绳用楔形线夹采用铸钢,牌号为ZG270-500。 4)棘轮轴采用45#钢机加工制造。 四安装 1.棘轮下锚底座(承力索下锚棘轮底座和接触线下锚棘轮底座) (1)检查到货的棘轮下锚底座规格型号是否符合施工设计图纸要求,配套件 是否齐全。 a)承力索下锚棘轮底座的安装:
棘轮机构[新版]
棘轮机构[新版] 棘轮机构 科技名词定义 中文名称: 棘轮机构 英文名称: ratchet mechanism 定义: 含有棘轮和棘爪的主动件作往复运动,从动件作步进运动的机构。 所属学科: 机械工程(一级学科);机构学(二级学科);其他机构(三级学科) 本内容山全国科学技术名词审定委员会审定公布口科名片 棘轮机构(ratchet and pawl),山棘轮和棘爪组成的一种单向间歇运动机构。棘轮机构常用在各种机床和自动机中间歇进给或回转工作台的转位上,也常用在千斤顶上。在自行车中棘轮机构用于单向驱动,在手动绞车中棘轮机构常用以防止逆转。棘轮机构工作时常伴有噪声和振动,因此它的工作频率不能过高。 H录
棘轮机构简介 棘轮机构的基本型式和工作原理 棘轮机构的分类 1.棘轮机构的应 用 1.棘轮机构的设 计要点 1. 棘轮机构简介 棘轮机构的基本型式和工作原理 棘轮机构的分类 1.棘轮机构的应 用 1.棘轮机构的设 计要点 1. 展开 编辑本段棘轮机构简介 棘轮机构将连续转动或往复运动转换成单向步进运动。 棘轮轮齿通常用单向齿,棘爪狡接于摇杆上,当摇杆逆时针方向摆动时,驱动棘爪便插入棘轮齿以推动棘轮同向转动;当摇杆顺时针方向摆动时,棘爪在棘轮上滑过,棘轮停止转动。为了确保棘轮不反转,常在固定构件上加装止逆棘爪。摇杆的往复摆动可山曲柄摇杆机构、齿轮机构和摆动油缸等实现,在传递很小动力时,也有用电磁铁直接
驱动棘爪的。棘轮每次转过的角度称为动程。动程的大小可利用改变驱动机构的结构参数或遮齿罩的位置等方法调节,也可以在运转过程中加以调节。如果希望调节的精度高于一个棘齿所对应的角度,可应用多棘爪棘轮机构。 编辑本段棘轮机构的基本型式和丄作原理 图示为机械中常用的外啮合式棘轮机构,它III主动摆杆,棘爪,棘轮、止回棘爪和机架组成。主动件空套在与棘轮固连的从动轴上,并与驱动棘爪用转动副相联。当主动件顺时针方向摆动时,驱动棘爪便插入棘轮的齿槽中,使棘轮跟着转过一定角度,此时,止回棘爪在棘轮的齿背上滑动。当主动件逆时针方向转动时,止回棘爪阻止棘轮发生逆时针方向转动,而驱动棘爪却能够在棘轮齿背上滑过,所以,这时棘轮静止不动。因此,当主动件作连续的往复摆动时,棘轮作单向的间歇运动。编辑本段棘轮机构的分类 棘轮机构的分类方式有以下儿种:按结构形式分类 棘轮机构按结构形式分类可分为齿式棘轮机构和摩擦式棘轮机构。 齿式棘轮机构结构简单,制造方便;动与停的时间比可通过选择合适的驱动机构实现。该机构的缺点是动程只能作有级调节;噪音、冲击和磨损较大,故不宜用于高速。 摩擦式棘轮机构是用偏心扇形楔块代替齿式棘轮机构中的棘爪,以无齿摩擦代替棘轮。特点是传动平稳、无噪音;动程可无级调节。但因靠摩擦力传动,会出现打滑现象,虽然可起到安全保护作用,但是传动精度不高。适用于低速轻载的场合。 按啮合方式分类 棘轮机构按啮合方式分类可分为外啮合棘轮机构和内啮合棘轮机构。 外啮合式棘轮机构的棘爪或楔块均安装在棘轮的外部,而内啮合棘轮机构的棘爪或楔块均在棘轮内部。 外啮合式棘轮机构111于加丄、安装和维修方便,应用较广。内啮合棘轮机构的特点是结构紧凑,外形尺寸小。按从动件运动形式分类
(English)基于ADAMS的棘轮机构设计和运动仿真
Design and kinematic simulation of ratchet mechanism based on ADAMS Shiyin Qiu Kunming university of science and technology Kunming, China kgqsy@https://www.wendangku.net/doc/2614092624.html, Haitao Wu a and Hongbin Liu b Kunming university of science and technology Kunming, China a whtyf2007@https://www.wendangku.net/doc/2614092624.html,, b lihhong6696@https://www.wendangku.net/doc/2614092624.html, Abstract —This paper designed a ratchet mechanism of a pastry slicer. In the first place, this discourse used SolidWorks software to model the ratchet mechanism, then imported the three-dimensional model into ADAMS by the nicer interface between SolidWorks and ADAMS to build a virtual machine and simulated it. The kinematic simulation result of ADAMS not only showed that the ratchet mechanism could fulfill the anticipative design requirements, but also offered the references to design and produce physical prototype of ratchet mechanism. The virtual prototype could be used to do a deeper analysis according to different requirements. Keywords-ratchet mechanism; ADAMS; SolidWorks; kinematic simulation; slicer I. I NTRODUCTION In some developed countries such as United States , Germany and Japanese, the virtual prototyping technology has already made an extensive application in the car manufacturing industry, engineering machine, aerospace industry, shipbuilding industry, machine electronics industry, defence industry, living physics, medical science and so on[1]. II. E STABLISHMENT OF RATCHET MECHANISM 3D M ODEL A. Mathematical Model of The Ratchet The design requirements of a pastry slicer are as follows. First, the pastry thickness scope is 10~20 (mm). Second, the pastry high scope is 5~80(mm).Third, The pastry width is 300(mm).The pastry width is 300(mm). The feeding mechanism was designed by using SolidWorks according to these requests. Ratchet mechanism[2-3] and belt drive mechanism[7] were used as the machine feeding mechanism of pastry slicer in order to alter the pastry thickness. According to the design requirements, the pastry thickness is 10~20(mm), according to (1): L = R /180?π××o (1) where L is the arc length, in m; R is the ratchet radius, in m;? is the circumferential angle, in degree. According to the design requirements, the maximum pastry thickness is 20mm, let 20()L mm =,20?=o in Eq.(1), the ratchet radius(R) is equal to 180/()mm πo . According to Eq.(1), if R=180/()mm πo and 5?=o , obviously, L is equal to 5(mm), therefore, the arc length that each turn of a ratchet tooth corresponding to is 5(mm), as a result, if pastry thickness is 10(mm), ratchet will turn 2 teeth, if pastry thickness is 15(mm), ratchet will turn 3 teeth, and if pastry thickness is 20(mm), ratchet will turn 4 teeth. The ratchet contour which is shown in Fig. 1 is obtained according to the above calculated data. Figure 1. Ratchet contour sketches B. Mathematical Model of The Crank-rocker Crank-rocker mechanism is an important part of the ratchet mechanism, the ratchet needs to turn four teeth when the pastry thickness is 20(mm), as a result, the maximum swing angle(ACB) of rocker is equal to 10o . As shown in Fig. 2, the relationships between the crank length and the distance that between the crank rotation center and the rocker rotation center are as follows: e= 1l /sin(ACB)=50/sin(10 )288mm (2) Figure 2. Kinematic diagram of crank-rocker 2011 International Conference on Mechatronic Science, Electric Engineering and Computer August 19-22, 2011, Jilin, China