MATLAB 相控阵系统工具箱
With the system toolbox, you can model common antenna and microphone elements. In a custom antenna or microphone, you can specify wideband, frequency-dependent patterns. You can also specify polarization in polarization-capable antenna elements, such as Dipole or custom antennas.
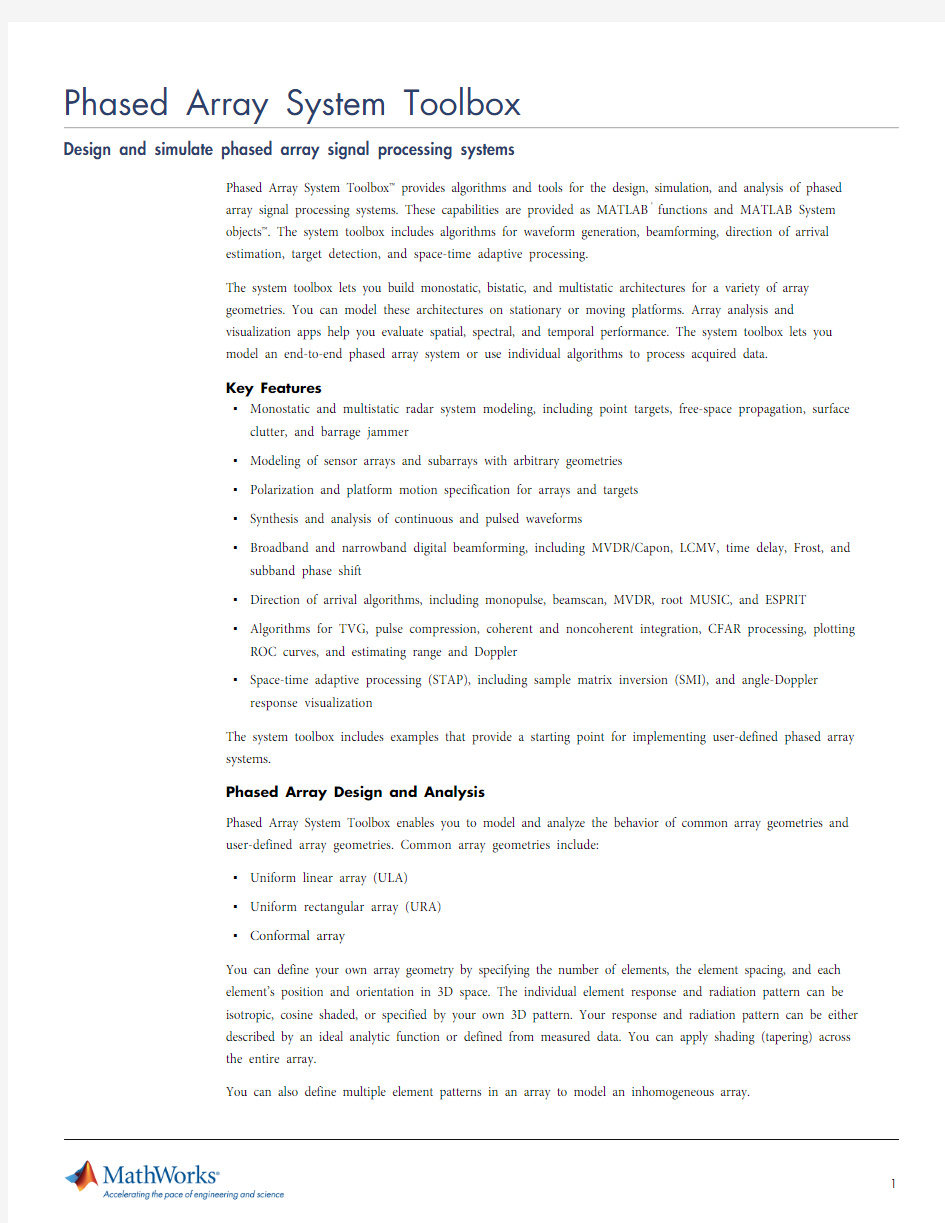
The system toolbox provides tools to visualize and analyze the radiation pattern of individual elements or of the whole array in aggregate. The visualization can be inspected in rectangular, spherical, and u/v space. With the tools, you can measure or visualize:
?Array geometry
?Array gain
?Array response
?Delay between elements
?Steering vector
?Element response
Three-dimensional beam pattern for a 10 x 10 uniform rectangular array.
Waveform Design and Analysis
Phased Array System Toolbox supports waveform design and analysis for many common waveforms, including:
?Constant frequency (PCW)
?Linear frequency modulation (LFM)
?Stepped FM
?Frequency modulation constant waveform (FMCW)
?Phased coded waveforms
The system toolbox provides a number of configurable parameters for each waveform, such as pulse repetition frequency (PRF), sample rate, pulse duration, and bandwidth. You can also design waveforms with staggered PRFs to address blind-speed problems in moving target indicator (MTI) systems. Waveform envelopes can be either rectangular or Gaussian weighted.
The system toolbox also provides apps and functions to visualize your waveform design, such as the ambiguity function (AF). The AF provides insight into the waveform characteristic in terms of range resolution, Doppler resolution, and the coupling between range and Doppler. It also provides the ideal matched-filter response.
Ambiguity function for a stepped FM waveform.
Transmitter and Receiver Modeling
Phased Array System Toolbox supports a generalized framework for modeling the physical transmission of a waveform, its propagation through the environment, and its ultimate reception. This framework allows for monostatic and bistatic system models. In addition, you can model array elements as part of a platform whose dynamics (initial position and velocity) are user-defined. You can deploy transmitter elements and receiver elements either on a common platform for monostatic modeling or on separate platforms for bistatic modeling. You can also model stationary system geometries by specifying a zero-velocity vector.
Transmitter Modeling
The system toolbox provides tools to model transmitter behavior by specifying parameters such as:
?Gain
?Peak power
?Loss factor
?Platform motion
Receiver Modeling
You can also model the reception of a signal at the receiver array to accommodate a variety of situations. You can control the receiver array’s behavior using the following attributes:
?Narrowband or broadband model
?Far-field or near-field model
?Array shading
?Platform motion
After a signal has been received across the array elements, you can configure the receiver front-end model parameters such as:
?Gain
?Loss factor
?Noise bandwidth
?Noise figure
?Reference temperature
You can also configure receiver models for either coherent or noncoherent processing.
Target and Environment Modeling
Target Modeling
You can model targets as point reflectors, which are principally defined by the radar cross section (RCS) or the RCS matrix if polarization is considered. Phased Array System Toolbox target models support the following target types:
?Nonfluctuating RCS models (Swerling 0 or 5)
?Fluctuating RCS models (Swerling 1–4)
With the system toolbox you can model more complex, distributed targets by creating a collection of distributed point reflectors. You can also model target motion by specifying the appropriate dynamics, such as initial position and velocity.
Environment Modeling
The system toolbox includes free-space environment models that simulate one-way or two-way propagation delays. It models both time delay and phase shift incurred during propagation. One-way propagation is useful for modeling bistatic systems. Two-way propagation enables you to model monostatic systems. You can model
user-specified complex models with MATLAB algorithms. Alternatively, you can integrate third-party and proprietary environment models with the system toolbox’s environment model.
The system toolbox also provides a barrage-jammer model to generate a wideband interference signal with
user-specified radiated power. You can use multiple jammers to model complex electromagnetic environments.
The system toolbox offers a constant gamma clutter model you can use to generate surface clutter from land or sea. The surface is divided into small patches during the simulation, and the responses from patches are assembled at the end to form the clutter echo. You can accelerate the clutter simulation using GPUs (requires Parallel Computing Toolbox?).
Spatial Signal Processing
Digital Beamforming
Beamforming is a fundamental spatial signal processing operation of a phased array system. Phased Array System Toolbox supports 1D and 2D beamforming techniques, as well as conventional and adaptive beamforming techniques.
The system toolbox provides the Capon algorithm, a common adaptive beamformer for suppressing interference, and the linearly constrained minimum variance (LCMV) beamformer, for avoiding situations where self-nulling can occur. For broadband signals, the system toolbox offers adaptive algorithms such as the Frost and time delay LCMV beamformers. You can also use subband processing as an alternative to time delays for broadband signals.
The system toolbox supports the following digital beamforming techniques:
Narrowband, including conventional (phase shift), MVDR (Capon), and LCMV
?Narrowband
Broadband, including Frost, time delay, time delay LCMV, and subband phase shift
?Broadband
Direction of Arrival Estimation
Estimating the direction of arrival (DOA) of incident signals is a fundamental spatial signal processing operation. For various array geometries, the system toolbox provides several processing techniques for estimating DOA. For uniform linear arrays, it provides:
?Sum and difference monopulse
?Beamscan
?MVDR (Capon)
?High-resolution techniques, including ESPRIT, beamspace ESPRIT, root MUSIC, root WSF
For uniform rectangular arrays, it provides:
?Sum and difference monopulse
?Beamscan
?MVDR (Capon)
For conformal arrays, it provides:
?Beamscan
?MVDR (Capon)
When using high-resolution DOA techniques, you can use either the Akaike information criterion (AIC) or the minimum description length (MDL) criterion to estimate the number of signals.
Plots showing 2D beamscan spatial spectrum (top) and 2D MVDR spatial spectrum (bottom).
Temporal Signal Processing
After a signal has been propagated through the receiver array and receiver front end, you can process the resultant radar cube using a number of temporal signal processing techniques provided by Phased Array System Toolbox, including:
?Time-varying gain control (TVG)
?Pulse compression
?Matched filter with spectrum weighting option
?Coherent and noncoherent integration
?Stretch processing
?Dechirp
At this point in the processing chain, the system toolbox provides algorithms for the detection and estimation of parameters of interest, such as range and Doppler. The following signal processing tools enable you to numerically characterize and visualize the detection performance of your system:
?Constant false alarm rate (CFAR) processing including cell-averaging (CA), greatest-of cell-averaging (GOCA), smallest-of cell-averaging (SOCA), and order statistic (OS)
?ROC curve visualization
?Neyman-Pearson detector threshold
?Albersheim and Shnidman equations
Receiver operating characteristic (ROC) curves for various SNR environments.
Space-Time Adaptive Processing
For suppressing clutter and jammer interference, Phased Array System Toolbox provides several space-time adaptive processing (STAP) algorithms, including:
?Displaced phase center array (DPCA)
?Adaptive DPCA
?Sample matrix inversion (SMI)
Although the SMI algorithm is computationally intensive and typically not a candidate for real-time implementation, it is useful as an ideal reference, against which you can compare other algorithms. An
angle-Doppler response tool provides a useful visualization of the overall performance of the output of the various STAP algorithms.
clutter return is suppressed and the target return is detectable.
suppression that render the target detectable.
Product Details, Examples, and System Requirements
https://www.wendangku.net/doc/2f15002094.html,/products/phased-array
Trial Software
https://www.wendangku.net/doc/2f15002094.html,/trialrequest
Sales
https://www.wendangku.net/doc/2f15002094.html,/contactsales
Technical Support
https://www.wendangku.net/doc/2f15002094.html,/support Resources
Online User Community https://www.wendangku.net/doc/2f15002094.html,/matlabcentral Training Services https://www.wendangku.net/doc/2f15002094.html,/training Third-Party Products and Services https://www.wendangku.net/doc/2f15002094.html,/connections Worldwide Contacts https://www.wendangku.net/doc/2f15002094.html,/contact
matlab 三维图形绘制实例
三维图形 一. 三维曲线 plot3(x1,y1,z1,选项1,x2,y2,z2,选项2,…,xn,yn,zn,选项n) 其中每一组x,y,z 组成一组曲线的坐标参数,选项的定义和plot 函数相同。当x,y ,z 是同维向量时,则x,y,z 对应元素构成一条三维曲线。当x,y ,z 是同维矩阵时,则以x,y,z 对应列元素绘制三维曲线,曲线条数等于矩阵列数。 Example1.绘制三维曲线。 程序如下: clf, t=0:pi/100:20*pi; x=sin(t); y=cos(t); z=t.*sin(t).*cos(t); %向量的乘除幂运算前面要加点 plot3(x,y,z); title('Line in 3-D Space'); xlabel('X');ylabel('Y');zlabel('Z'); grid on; 所的图形如下: -1 1 X Line in 3-D Space Y Z 二. 三维曲面 1. 产生三维数据 在MATLAB 中,利用meshgrid 函数产生平面区域内的网格坐标矩阵。
语句执行后,矩阵X 的每一行都是向量x ,行数等于向量y 的元素的个数,矩阵Y 的每一列都是向量y ,列数等于向量x 的元素的个数。 2. 绘制三维曲面的函数 surf 函数和mesh 函数 example2. 绘制三维曲面图z=sin(x+sin(y))-x/10。 程序如下: clf, [x,y]=meshgrid(0:0.25:4*pi); %产生平面坐标区域内的网格坐标矩阵 z=sin(x+sin(y))-x./10; surf(x,y,z); axis([0 4*pi 0 4*pi -2.5 1]); title('surf 函数所产生的曲面'); figure; mesh(x,y ,z); axis([0 4*pi 0 4*pi -2.5 1]); title('mesh 函数所产生的曲面'); -2.5 -2-1.5-1-0.500.51surf 函数所产生的曲面
论雷达技术的发展与应用及未来展望
论雷达技术的发展与应用及 未来展望 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
论雷达技术的发展与应用及未来展望 摘要:雷达是用无线电的方法发现目标并测定它们的空间位置的装置。雷达的发展与使用过程,正是电子技术在军事中应用的缩影,而雷达的未来,更与电子技术息息相关。本文介绍了雷达的发展与应用的历史,重点介绍了相控阵雷达与激光孔径雷达两类雷达的原理与特点,并指出雷达的弱点及未来发展方向关键词:雷达;发展;实战应用;种类;弱点;未来
雷达主要用于对远距离物体的方位、距离、高度做精确检测,可以说是现代军事电子技术的代表。随着不断的发展,雷达在战区的警戒、各种新式武器威力的发挥、协同作战的指挥中的地位愈发重要。 1雷达的发展与应用 雷达的基本工作原理是靠发射探测脉冲和接受被照射目标的回波发现目标。百年的时间里,随着新技术的发展和应用,雷达也在不断发展。 1.1雷达的发展史 下面是雷达出现前夜相关理论的一系列突破: 1842年多普勒(Christian Andreas Doppler)率先提出利用多普勒效应的多普勒式雷达。 1864年马克斯威尔(James Clerk Maxwell)推导出可计算电磁波特性的公式。 1886年赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。 1888年赫兹成功利用仪器产生无线电波。 1897年汤普森(JJ Thompson)展开对真空管内阴极射线的研究。 这些与电磁波相关的科技是雷达的最基本理论。1904年克里斯蒂安?豪斯梅耶(Christian Hulsmeyer)宣称他的“电动镜”可以传输音频,并能够接受到运动物体的回应。可以说,就是这位德国人奠定了这项技术。然而,在一战期间,德国军官们所注意的是无线电通讯。 接下来雷达的出现就显得顺理成章了。1933年,鲁道夫?昆德(Rudolf Kunhold)提出毫米波长可能可以探测出水面船只及飞船的位置。两年后,威廉?龙格(Wilhelm Runge)已经能够根据飞机自身所发出的信号计算出50公里以外的飞机位置所在,即使是在夜晚或者有雾的时候。 第二次世界大战中的不列颠战役成为雷达正式登场的舞台。法国的迅速陷落,使希特勒有理由相信只需通过空袭便能征服英国。在这一大规模的空战中,纳粹德国空军拥有的飞机数量远远超过了英国皇家空军——2670架对1475架。而英国在雷达方面有优势。1936年1月英国W.瓦特在索夫克海岸架起了英国第一个雷达站。1938年,为保卫英格兰,用七部雷达组成"Chain Home"雷达网,雷达频率30兆赫。雷达网使德国轰炸机还没到达英吉利海峡即被发现,英国也因此取得了英伦空战的胜利。这场胜利也是第二次世界大战中较大的转折点之一。 之后四十年人们更加意识到雷达的重要作用,雷达也因此得到了不断发展,也分出了不同种类。本节余下部分将有选择地概括各个年代的重大进展。 1.1.1四十年代 四十年代初期(在二次大战期间),由于英国发明了谐振腔式磁控管,从而在先驱的VHF雷达发展的同时,产生了微波雷达发展的可能性。它开拓了发展L波段(23q厘米波长)和S波段(10厘米波长)大型地面对空搜索雷达和X波段(3厘米波长)小型机载雷达的美好前景。1941年苏联最早在飞机上装备预警雷达。两年后美国麻省理工学院研制出机载雷达平面位置指示器,预警雷达。时至今日,雷达已成为各式飞机不可缺少的组成部分,是实施精确打击和自身防护的必要手段。 1.1.2五十年代
MATLAB仿真教程
一、设计目的 通过运用MATLAB对函数进行Z域分析和单边带信号的调制与解调,使我们进一步加深对MATLAB的认识和运用,以实现以下目的: 1.本次试验进一步熟悉了MATLAB软件的使用方法及相关的操作。 2.对Z变换及其反变换函数在MATLAB中的调用有了掌握。 3.理论与实际的仿真相结合,更直观的看到结果。 4.观察了单边带信号调制与解调后的图像,加深认识。 二、设计原理 MATLAB是The MathWorks公司在1984年推出的一种商品化软件,它提供了大量丰富的应用函数,并且具有扩充的开放性结构。目前,该软件包涵盖了控制系统应用、数字信号处理、数字图像处理、通讯、神经网络、小波理论分析、优化与统计、偏微分方程、动态系统实时仿真等多学科专业领域。 其中单边带调制信号是将双边带信号中的一个边带滤掉而形成的。根据方法的不同,产生单边带调制信号的方法有:滤波和相移法。 由于滤波法在技术上比较难实现所以在此我们将用相移法对单边带调制与解调系统进行讨论与设计。 三、设计内容和MATLAB图像
1、数字系统的响应 源代码如下: b=[0 1 2 1 0]; a=[1 -0.5 0 0.3 -0.005]; subplot(421);zplane(b,a); title('系统的零极点图'); subplot(422);impz(b,a,21); title('单位脉冲响应'); subplot(423);stepz(b,a,21); title('单位阶跃响应');
N=21;n=0:N-1; x=exp(-n); x0=zeros(1,N); y0=[1,-1]; xi=filtic(b,a,y0); y1=filter(b,a,x0,xi); xi0=filtic(b,a,0); y2=filter(b,a,x,xi0); y3=filter(b,a,x,xi); [h w]=freqz(b,a,21); subplot(424);stem(n,y1); title('零输入响应');grid on; subplot(425);stem(n,y2); title('零状态响应');grid on; subplot(426);stem(n,y3); title('系统的全响应');grid on; subplot(427);plot(w,abs(h)); title('幅频特性曲线');grid on; subplot(428);plot(w,angle(h)); title('相频特性曲线');grid on;
CRC16并行计算的Matlab推导
CRC16并行计算的Matlab推导 本文使用的CRC16的生成多项式为: 其对应的串行编码图如下图所示。 假设输入数据的位宽为8比特,即{I7,I6,I5,I4,I3,I2,I1,I0},I为Input的首字母。I0表示最低比特位,I7表示最高比特位。 在串行模式下,I0先输入CRC16计算模块,于是I0输入后各个寄存器的状态变化如下: = = = = = = = = = = =
= = = = = 可以将以上表达式组成矩阵乘法的形式,则有: '0D T D S I =?+? (1) 其中,D 为0D ~15D 构成的列向量,用转置矩阵的形式表示为: () 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15T D D D D D D D D D D D D D D D D D =同理,'D 是'0D ~'15D 构成的列向量,用转置矩阵的形式表示为: () '' ' ' ' ' ' ' ' ' ' ' ' ' ' ' '0123456789101112131415T D D D D D D D D D D D D D D D D D = 表达式(1)中的矩阵T ,表示为: 00000000000000110000000000000000100000000000001001000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000T =0000010000000000000000100000000000000001000000000000000011?? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ?
有源相控阵雷达的发展
有源相控阵雷达的发展 机载有源相控阵雷达的发展水平以美国最为先进。在20世纪60年代末即研制出有604个单元的X波段有源阵列天线。在1988年到1991年完成了配装F22战斗机的AN/APG-77雷达的飞行试验,该雷达有2000个T/R组件,对雷达反射面积为1平方米的目标,探测距离设计要求为120—220KM。综合了探测、敌我识别、电子侦察和电子干扰等多种功能于一体,具有低截获概率(也就是说不易被对方雷达告警器发现)。可以说美国在机载有源相控阵火控雷达技术上已经比较成熟。除了APG-77雷达以外,美国还在原有的PD雷达上进行改进,换装相控阵天线,例如计划给F18E战斗机换装APG79雷达和给F15换装的APG63(V)3雷达等除此之外,英、法、德三国联合研制机载固态多功能有源相控阵雷达,2001年已经完成具有1200个T/R组件的全尺寸样机的试验工作,但是离实用化还有一定的距离。 前苏联在八十年代初即研制出无源相控阵雷达,装备于米格31战斗机上,搜索距离200千米,对战斗机的跟踪距离达到90千米以上,可以同时跟踪10个目标并攻击其中的4个,这在当时已经是比较先进的了。目前俄罗斯正在努力发展有源相控阵雷达,但离实用化也有很大的距离。 目前世界上另一种装机实用化的有源相控阵雷达为日本F-2战斗机所采用的火控雷达,这反映了日本在电子工业上的技术实力。该雷达包含800个T/R 组件,公开的探测距离为80KM(中等战斗机目标)。如果这个数据属实的话,则说明日本虽然在半导体生产技术上比较先进,但是在雷达系统设计上的能力仍嫌不足。 我国从六十年代开始即开展相控阵技术的研究,并于七十年代研制成功7010大型远程相控阵雷达,曾出色的完成了观测美国天空试验室和苏联核动力卫星殒落任务,引起世界重视(相关资料可查阅中国科学技术协会网站文章)。在九十年代又研制出YLC-2全固态相控阵远程警戒雷达(第二届中国国际国防电子展览会上展出)。这些成果都反映了我国在相控阵雷达研制上的进步。不过,相对于一些陆基和舰载的大型雷达来说,机载相控阵雷达的技术难度要大得多,主要难度又集中在小体积T/R组件的研制上。据介绍,607所和电子部14所在机载相控阵雷达的研制上处于国内领先地位,目前,相控阵雷达的数据处理部分已经比较成熟,但是在T/R组件的生产,尤其是成本控制上仍然有相当大的差距。据顾诵芬院士在前不久的介绍,国内目前单个T/R组件的生产成本要达到数万人民币,这样,光雷达天线的造价就已经是天价了,而美国目前已经将T/R组件的生产成本控制在四五百美元以下,因此我们的差距还是相当大的。对比美国的发展历程,我们要研制出AN/APG-77级别的雷达,可能要到2010年以后。相对来说,无源相控阵雷达的技术难度要小得多,因此在研制出实用的有源相控阵雷达之前,完全有可能采用无源相控阵雷达作为过渡产品。而且,即使有源相控阵雷达研制成功以后,无源相控阵雷达作为一种低端产品,仍然具有很大的使用价值。 我国在航空电子产品上起步晚,发展慢,一度和西方先进国家的差距拉得
相控阵雷达系统的仿真_王桃桃
计算机与现代化 2014年第2期 JISUANJI YU XIANDAIHUA 总第222期 文章编号:1006- 2475(2014)02-0209-04收稿日期:2013-09-29作者简介:王桃桃(1989-),女,江苏沭阳人, 南京航空航天大学自动化学院硕士研究生,研究方向:雷达系统仿真;万晓冬(1960-),女,江苏南京人, 副研究员,硕士生导师,研究方向:分布式仿真技术,实时分布式数据库技术,嵌入式软件测试技术;何杰(1988- ),男,安徽铜陵人,硕士研究生,研究方向:机载红外弱小目标检测,三维视景仿真。相控阵雷达系统的仿真 王桃桃,万晓冬,何 杰 (南京航空航天大学自动化学院,江苏南京210016) 摘要:雷达的数字仿真及雷达仿真库的建立已经成为近年来雷达领域研究的热点。本文主要进行相控阵雷达系统的仿真研究。首先根据相控阵雷达的组成和原理,建立相控阵雷达的仿真模型与数学模型。然后选择Simulink 作为仿真平台,对相控阵雷达系统进行仿真与研究。仿真的模块主要有天线模块、信号环境模块、信号处理模块以及GUI 人机交互界面模块。最终在Simulink 库中生成自己的雷达子库,形成相控阵雷达系统,为后续相控阵雷达的研究奠定基础。关键词:雷达;相控阵;信号处理中图分类号:TP391.9 文献标识码:A doi :10.3969/j.issn.1006-2475.2014.02.047 Simulation of Phased Array Radar Systems WANG Tao-tao ,WAN Xiao-dong ,HE Jie (College of Automation Engineering ,Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China )Abstract :The digital simulation of radar and the establishment of radar simulation libraries has become research hot spot in radar field in recent years.This paper mainly focuses on phased array radar system simulation.According to the composition and prin-ciple of phased array radar ,it establishes the simulation model and mathematical model of phased array radar.Then ,the paper does simulation and research on phased array radar system by choosing Simulink as the simulation platform.The simulation mod-ule mainly includes the antenna module ,the signal environment module ,the signal processing module and GUI man-machine in-terface module.Eventually it generates radar sub-libraries and forms phased array radar system ,which lay the foundation for fol-low-up phased array radar study. Key words :radar ;phased array ;signal processing 0引言 计算机仿真技术应用于雷达源于20世纪70年代,国内雷达仿真起步较晚,仿真主要是基于SPW 、Matlab 、Simulink 、ADS 、HLA 等平台,其中Simulink 是一种在国内外得到广泛应用的计算机仿真工具,它支持线性系统和非线性系统,连续和离散事件系统,或者是两者的混合系统以及多采样率系统。ADS (Ad-vanced Design System )软件可以实现高频与低频、时域与频域、噪声、射频电路、数字信号处理电路的仿真等。SPW (Signal Processing Workspace )是用于信号处理系统设计的强有力的软件包,在雷达领域有着广泛的应用。HLA (High Level Architecture )提供了基于分布交互环境下仿真系统创建的通用技术支撑框架, 可用来快速地建造一个分布仿真系统。比较4种仿 真平台,SPW 比较昂贵,只能在Unix 操作系统下使用,HLA 通信协议复杂,不同版本的RTI 可能有无法通信的问题。Simulink 应用于雷达仿真比ADS 广泛并易于推广,所以本文采用Simulink 作为仿真平台。 为了进行后期雷达与红外的数据融合,首先需要建立雷达模块以产生雷达数据源,本文根据相控阵雷达的工作原理,采用数字仿真的方法,仿真雷达模块。首先提出相控阵雷达的仿真结构图以及给出各个模块的数学模型,然后根据数学模型,利用Simulink 仿真平台,仿真实现雷达的各组成模块,从而构建一个完整的雷达系统。同时,也可以通过使用S 函数将各个模块封装,然后建成自己的雷达仿真库,从而可以形成不同类型的雷达系统,便于更好地进行雷达系统
弹载有源相控阵雷达的应用
相控阵雷达又被称为相位控制阵列,是通过改变雷达波相位来改变雷达波束方向,也被称为电扫雷达。相控阵雷达目前分为整体馈源的无源相控阵,和子阵带独立馈源的有源相控阵。有源相控阵被通称为AESA ,也是电扫相控阵雷达技术的高端产品。相控阵的优点是可以取消机械方向指向机构,波束依靠电控偏转的指向灵活,无惯性,数据更新速率快,适合与数字式信号处理系统综合,还具有功能转换速度快,可靠性高和抗干扰能力强的优点,但也存在工艺技术难度比较大,阵面成本较高的弱点。AESA 现在已经成为机载雷达应用的尖端技术,弹载AESA 的很多技术也已经接近或达到实用标准,美国、日本、俄罗斯和西欧国家均已开始具体应用项 目的研究。中国作为军用航空电子技术的后起之秀,也逐步具备了第二梯队的技术实力。 主动雷达导引头的技术特征 主动雷达是第四代雷达制导空空导 弹的代表特征,是现代战术导弹雷达导引头的主流,也是实现复合制导和全向搜索功能的技术基础。现有采用主动雷达导引头的战术导弹,导引头大都是由天线、机械位标器和发射机组成,雷达天线依靠机械位标器运动实现扇面扫描。 常规机扫雷达的技术成熟,重量轻,成本较低,机械扫描的工作角度范围大, 弹体轴线大偏角扫描的距离衰减率也较低。机械扫描的优点不少,但机扫天线 需要结构复杂的方向和滚转稳定装置,天线运动时还要克服惯性的影响。同时,雷达罩内必须留出够天线自由转动的半球形空间,致使雷达罩的尺寸和外形都受到限制,无法根据气动要求进行最优化处理。雷达天线机械扫描的覆盖范围大,天线阵面不透波的技术特点,也限制了不同导引方式的集成。现有采用复合制导技术的雷达制导战术导弹,大都将雷达作为主要导引措施,红外制导则大都安装在弹体侧面以避开雷达天线 (如“标准”Ⅱ和“雄风”Ⅱ),或采用缩小 天线/光学窗口尺寸的方式,将两种导引头集中安装在弹头的不同位置,结果就是要么限制辅助导引系统的工作视场,要么影响导引系统的可用窗口面积,最终都要限制复合制导技术的综合效果。 相控阵天线的技术特点 AESA 天线的优点是采用集中式收/ 发机模块,天线阵面可以集成大量功能单元体,功率密度比平板缝隙天线要高得多,并可依据电扫描方式实现较大的天线尺寸。如果用通俗的对比描述雷达的原理,可以用电筒作为例子。 常规的平板缝隙雷达类似于用灯泡的普通电筒,灯泡就等同于雷达的馈源。灯泡发出的光通过反射镜头(波导 管)反射,由点形成面后产生等镜头的光束前向照射,照射的光(雷达波)是集中的光/波束。普通的平板缝隙雷达天线是这样,无源相控阵则是采用背光板的方式,把集中的能源分配给排列成阵的无源反射体。有源相控阵雷达则类似平板背板上密集安装着LED 灯的电筒,每个灯都有独立的光源和反射体,密集排列的点光源共同组成等镜头的照射波束。通过类比描述的过程,现有的雷达系统,无论是平板缝隙还是相控阵,形成的雷达波束都是集中的,相控阵虽可利用不同的单元形成多个照射波束,但波束分解后单独波束的功率是降低的,探测距离显然无法和集中波束相比。相控阵天线阵组件的数量取决于波长和天线面积,单独T/R 模块的功率则由材料决定。现有相控阵天线T/R 组件大都采用传统的GaAs (砷化镓),该材料技术和生产工艺相对比较成熟,应用广泛,综合性能还有提高的潜力,近年来已找到更适合的新材料。弹载雷达的T/R 组件如果采用GaN (氮化镓)和SiC (碳化硅)替代目前的GaAs ,T/R 组件可输出的功率理论上能提高近10倍(甚至超过10倍),雷达的探测和稳定跟踪距离都将有很大的提高。 材料的改进可以获取很大的性能收益,但对空间和能源供应条件不好的弹载雷达,高性能材料往往还要受其它因素限制。同时,雷达性能的改善程度往 弹载有源相控阵雷达的应用 文/中秋 ◎日本AAM-4B 空空导弹,由于采用的主动相控阵雷达比较耗电,导弹需要增加燃料而导致体积重量加大 Ordnance Knowledge 54 往无法与材料单纯的性能平衡。按照正常的技术原理计算的结果,AESA 的功率与探测距离的变化并不等同。用现有AESA 天线技术作为依据,雷达天线辐射的总功率增加10倍后,集中波束的探测距离只能增加0.87倍。正是考虑到地球曲面和远距离角测量精度的影响,机载雷达的功率与搜索距离之间必须找到最佳平衡点。增大搜索距离对作战平台有价值,但付出的电源和冷却代价,却限制了相控阵雷达增加功率的实用条件,工作环境更恶劣的弹载雷达面对的困难显然要比机载雷达更大。相控阵主动雷达导引头的发展常规雷达需要进行方向和俯仰扫描,这就要给雷达天线提供机械扫描的驱动装置,盘形天线的两轴运动会形成一个半球形空间。如果将雷达用于高速运动的飞行器,就需要为天线提供一个低阻力的空腔透波结构。飞机的雷达天线罩和导弹的导引头舱,都采用了低阻力的尖顶或卵形回转体外形。雷达罩的截面积要明显大于包容的天线面积,前向收缩的曲面也要受天线旋转的球面限制。如果用飞机作为例子去对比,追求雷达全向扫描的战术飞机大都采用轴对称外形的雷达,专用的对地攻击飞机(如图-22M 和F-111)不需要雷达有大的上视扫描范围,雷达罩上方可采用接近平面的非对称外形。现有战术导弹雷达导引头大都采用单脉冲体制,现役先进空空导弹的雷达导引头基本都采用了平板缝隙天线,下一代或现役改进型则会选择AESA 天线。相控阵雷达用固定阵面就能实现高于±45度的扫描范围,这就有条件通过对固态天线阵面的设计,省下机械扫描装置和天线活动的空间,更好的利用导弹全弹径的截面积,使雷达天线形状尽可能与气动外形相适应。现有导弹雷达制导天线大都是轴对称的正圆形,这是为了适应弹体的结构和简化气动控制,也是为满足导弹大过载俯仰和滚转时雷达天线的稳定要求。如果实现固定阵面的全电扫,雷达天线将成为弹体结构的一部分,这就能依据导弹的特点和控制要求,采用扁圆甚至碟形截面的升力弹体,实现中、远距导弹小/无翼的高升力气动布局,为导弹选择低阻力和低信号特征的异形天线罩,最◎主动相控阵雷达T/R 组件数量,“阵风”的RBE-2雷达(左)约840个,“台风”的Captor-E 雷达(右)接近1500个,但雷达性能并非简单由此决定 ◎F-111(左)和图-22M (右)不需要雷达有大的上视扫描范围,雷达罩上方可采用接近平面的非对称外形 兵器知识2016年2期 55
matlab三维二维离散曲面画图教程
傅里叶变换 img=imread('RADU}4W~M9]09V7Q)ZQ5%~7.png'); %img=double(img); f=fft2(img); %傅里叶变换 f=fftshift(f); %使图像对称 r=real(f); %图像频域实部 i=imag(f); %图像频域虚部 margin=log(abs(f)); %图像幅度谱,加log便于显示 phase=log(angle(f)*180/pi); %图像相位谱 l=log(f); subplot(2,2,1),imshow(img),title('源图像'); subplot(2,2,2),imshow(l,[]),title('图像频谱'); subplot(2,2,3),imshow(margin,[]),title('图像幅度谱'); subplot(2,2,4),imshow(phase,[]),title('图像相位谱'); https://www.wendangku.net/doc/2f15002094.html,/s/blog_1667198560102wmzu.html 傅里叶变换 I = imread('RADU}4W~M9]09V7Q)ZQ5%~7.png'); %读入数字图像 I = rgb2gray(I);%将图像进行灰度处理 J = fft2(I);%将图像实行傅里叶变换 figure,imshow(I);%这里能得到频谱图 J = fftshift(J); figure,imshow(log(abs(J)),[]); %将频谱平移 J(abs(J)<5)=0;%不必要的过滤掉 figure,imshow(log(abs(J)+eps),[]); J = ifftshift(J);K = ifft2(J);figure,imshow(K,[0 255]);%傅里叶逆变换 自己所写的代码 I = imread('RADU}4W~M9]09V7Q)ZQ5%~7.png'); %读入数字图像 J = fft2(I); %将图像实行傅里叶变换figure,imshow(I); %这里能得到频谱图 J = fftshift(J); figure,imshow(log(abs(J)),[]); %将频谱平移 J(abs(J)<5)=0; %不必要的过滤掉figure,imshow(log(abs(J)+eps),[]); J = ifftshift(J);K = ifft2(J); ss=real(ifft2(J));sss=uint8(ss);subplot(1,2,2); imshow(sss) figure,imshow(K,[0 255]); %傅里叶逆变换
直流电动机的MATLAB仿真..
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm');
hold on; R_c=0; for coef=1:;; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); hold on; U=U_N;R_c=; for R_c=0::; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('R=',num2str(R_c+R_a),'\Omega'); s_y=400*(4-R_c*; text(120,s_y,str);
相控阵雷达之弊端
相控阵雷达之弊端 舰载多功能相控阵雷达是舰载雷达的一个主要发展方向,具有探测目标精度高、抗干扰能力强、可靠性高、隐身性能好等诸多优点。相控阵雷达采用电子稳定平台,通过自适应调度雷达时间和能量资源,改变天线表面阵列所发出波束的合成方式来改变波束扫描方向,可同时完成搜索警戒、精确跟踪、目标敌我识别、导弹制导、目标引导等多种功能。相控阵雷达使用电子扫描方式,通过改变频率或者是改变相位的方式,将合成的波束发射的方向加以变化。电子扫描扫描速率高、改变波束方向的速率快、对于目标测量精确度高于机械扫描雷达。目前,中、美、日、俄、法、意、德、英等国家都装备或正在研制相控阵雷达,其中较为著名的有中国装备于052C导弹驱逐舰和“辽宁”号航空母舰上的346相控阵雷达和装备于052D型导弹驱逐舰上的346A型相控阵雷达;美国装备于阿利?伯克级驱逐舰上的SPY-1系列相控阵雷达;日本海军装备在“日向”级“护卫舰”上的FCS-3型相控阵雷达等。多功能相控阵雷达虽然有着诸多的优点,但其与任何武器装备一样,有其利也有其弊。从造价上来说,相控阵雷达的造价普遍偏高,往往是普通雷达的数十倍乃至数百倍,这使得多功能相控阵雷达一般只能装备在一些高端主战舰艇上;从适装舰艇方面来说,由于多功能相控
阵雷达的重量一般较重而体积较大,故此,只能装备于大型舰艇上。从能耗上来说,多功能相控阵雷达的功率较大,长时间开机对舰艇上宝贵的能源资源耗费厉害。在性能上,多功能相控阵雷达也有一些不足之处,如对杂波特别是海杂波抑制能力不足、探测隐身目标能力不足、在对抗自卫式噪声干扰能力不足、探测低空及掠海目标能力不足、在强杂波背景时性能下降等。舰载多功能相控阵雷达既有预警雷达的远程警戒能力,又具有火控雷达的高精度。其警戒预警距离超过300千米,全空域搜索数据率在10至20秒。为满足舰载武器系统制导及火控的精度要求,雷达跟踪测量精度不能超过10分,而一般舰载警戒雷达的跟踪测量精度往往在几度以内。综合多方面性能上的考虑及目前的科技水平和经济性,舰载相控阵雷达雷达一般都以S频段作为工作频段。S频段与C频段和X频段相比较而言,波束宽,可用带宽窄,对海杂波的抑制能力不强。为了进行三坐标测量,该类型雷达都采用针状波束,为了提高可靠性,一般都采用工作在饱和放大模式的固态发射机。由于发射机输出功率不可调,故不能象普通对海雷达那样对发射波束进行赋形,导致在低空或掠海工作模式时海杂波更加强烈。在近岸工作时,如果蒸发波导等异常传播效应明显,会有大量远距陆地、岛屿等杂波出现,距离上的多重折叠会进一步增加杂波抑制的难度。而为了保证多任务和多目标能力,此时一般不采用MTD或
Matlab Simulink 仿真步骤
MATLAB基础与应用简明教程 张明等编著 北京航空航天大学出版社(2001.01) MATLAB软件环境是美国New Mexico大学的Cleve Moler博士首创的,全名为MATrix LABoratory(矩阵实验室)。它建立在20世纪七八十年代流行的LINPACK(线性代数计算)和ESPACK(特征值计算)软件包的基础上。LINPACK和ESPACK软件包是从Fortran语言开始编写的,后来改写为C语言,改造过程中较为复杂,使用不便。MA TLAB是随着Windows环境的发展而迅速发展起来的。它充分利用了Windows环境下的交互性、多任务功能语言,使得矩阵计算、数值运算变得极为简单。MA TLAB语言是一种更为抽象的高级计算机语言,既有与C语言等同的一面,又更为接近人的抽象思维,便于学习和编程。同时,它具有很好的开放性,用户可以根据自己的需求,利用MA TLAB提供的基本工具,灵活地编制和开发自己的程序,开创新的应用。 本书重点介绍了MA TLAB的矩阵运算、符号运算、图形功能、控制系统分析与设计、SimuLink仿真等方面的内容。 Chap1 MATLAB入门与基本运算 本章介绍MATLAB的基本概念,包括工作空间;目录、路径和文件的管理方式;帮助和例题演示功能等。重点介绍矩阵、数组和函数的运算规则、命令形式,并列举了可能得到的结果。由于MA TLAB的符号工具箱是一个重要分支,其强大的运算功能在科技领域有特殊的帮助作用。 1.1 MATLAB环境与文件管理 1.2 工作空间与变量管理 1.2.1 建立数据 x1=[0.2 1.11 3]; y1=[1 2 3;4 5 6]建立一维数组x1和二维矩阵y1。分号“;”表示不显示定义的数据。 MATLAB还提供了一些简洁方式,能有规律地产生数组: xx=1:10 %xx从1到10,间隔为1 xx=-2:0.5:1 %xx从-2到1,间隔为0.5 linespace命令等距离产生数组,logspace在对数空间中等距离产生数组。对于这一类命令,只要给出数组的两端数据和维数就可以了。 xx=linespace(d1,d2,n) %表示xx从d1到d2等距离取n个点 xx=logspace(d1,d2,n) %表明xx从10d1到10d2等距离取n个点 1.2.2 who和whos命令 who: 查看工作空间中有哪些变量名 whos: 了解这些变量的具体细节 1.2.3 exist命令 查询当前的工作空间内是否存在一个变量,可以调用exist()函数来完成。 调用格式:i=exist(…A?); 式中,A为要查询的变量名。返回的值i表示A存在的形式: i=1 表示当前工作空间内存在一个变量名为A的矩阵; i=2 表示存在一个名为A.m的文件; i=3 表示MATLAB的工作路径下存在一个名为A.mex的文件;
MATLAB分布式并行计算服务器配置和使用方法Word版
Windows下MATLAB分布式并行计算服务器配置和使用方 法 1MATLAB分布式并行计算服务器介绍 MATLAB Distributed Computing Server可以使并行计算工具箱应用程序得到扩展,从而可以使用运行在任意数量计算机上的任意数量的worker。MATLAB Distributed Computing Server还支持交互式和批处理工作流。此外,使用Parallel Computing Toolbox 函数的MATLAB 应用程序还可利用MATLAB Compiler (MATLAB 编译器)编入独立的可执行程序和共享软件组件,以进行免费特许分发。这些可执行应用程序和共享库可以连接至MATLAB Distributed Computing Server的worker,并在计算机集群上执行MATLAB同时计算,加快大型作业执行速度,节省运行时间。 MATLAB Distributed Computing Server 支持多个调度程序:MathWorks 作业管理器(随产品提供)或任何其他第三方调度程序,例如Platform LSF、Microsoft Windows Compute Cluster Server(CCS)、Altair PBS Pro,以及TORQUE。 使用工具箱中的Configurations Manager(配置管理器),可以维护指定的设置,例如调度程序类型、路径设置,以及集群使用政策。通常,仅需更改配置名称即可在集群间或调度程序间切换。 MATLAB Distributed Computing Server 会在应用程序运行时在基于用户配置文件的集群上动态启用所需的许可证。这样,管理员便只需在集群上管理一个服务器许可证,而无需针对每位集群用户在集群上管理单独的工具箱和模块集许可证。 作业(Job)是在MATLAB中大量的操作运算。一个作业可以分解不同的部分称为任务(Task),客户可以决定如何更好的划分任务,各任务可以相同也可以不同。MALAB中定义并建立作业及其任务的会话(Session)被称为客户端会话,通常这是在你用来编写程序那台机器上进行的。客户端用并行计算工具箱来定义和建立作业及其任务,MDCE通过计算各个任务来执行作业并负责把结果返
雷达发展史
雷达发展史 雷达的基本概念形成于20世纪初。但是直到第二次世界大战前后,雷达才得到迅速发展。早在20世纪初,欧洲和美国的一些科学家已知道电磁波被物体反射的现象。 1922年,意大利G.马可尼发表了无线电波可能检测物体的论文。美国海军实验室发现用双基地连续波雷达能发觉在其间通过的船只。1925年,美国开始研制能测距的脉冲调制雷达,并首先用它来测量电离层的高度。30年代初,欧美一些国家开始研制探测飞机的脉冲调制雷达。1936年,美国研制出作用距离达40公里、分辨力为457米的探测飞机的脉冲雷达。1938年,英国已在邻近法国的本土海岸线上布设了一条观测敌方飞机的早期报警雷达链。 第二次世界大战期间,由于作战需要,雷达技术发展极为迅速。就使用的频段而言,战前的器件和技术只能达到几十兆赫。大战初期,德国首先研制成大功率三、四极电子管,把频率提高到500兆赫以上。这不仅提高了雷达搜索和引导飞机的精度,而且也提高了高射炮控制雷达的性能,使高炮有更高的命中率。1939年,英国发明工作在3000兆赫的功率,地面和飞机上装备了采用这种磁控管的微波雷达,使盟军在空中作战和空-海作战方面获得 优势。大战后期,美国进一步把磁控管的频率提高到10吉赫,实现了机载雷达小型化并提高了测量精度。在高炮火控方面,美国研制的精密自动跟踪雷达SCR-584,使高炮命中率从战争初期的数千发炮弹击落一架飞机,提高到数十发击中一架飞机。 40年代后期出现了动目标显示技术,这有利于在地杂波和云雨等杂波背景中发现目标。高性能的动目标显示雷达必须发射相干信号,于是研制了功率、、前向波管等器件。50年代出现了高速喷气式飞机,60年代又出现了低空突防飞机和中、远程导弹以及军用卫星,促进了雷达性能的迅速提高。60~70年代,电子计算机、、和大规模数字集成电路等应用到雷达上,使雷达性能大大提高,同时减小了体积和重量,提高了可靠性。 在雷达新体制、新技术方面,50年代已较广泛地采用了动目标显示、单脉冲测角和跟踪以及脉冲压缩技术等;60年代出现了;70年代固态相控阵雷达和脉冲多普勒雷达问世。 在中国,雷达技术从50年代初才开始发展起来。中国研制的雷达已装备军队。中国已经研制成防空用的二坐标和三坐标警戒引导雷达、地-空导弹制导雷达、远程导弹初始段靶场测量雷达和再入段靶场测量与回收雷达。中国研制的大型雷达还用于观测中国和其他国家发射的人造卫星。 在民用方面,远洋轮船的导航和防撞雷达、飞机场的航行管制雷达以及气象雷达等均已生产和应用。中国研制成的机载合成孔径雷达已能获得大面积清晰的测绘地图。中国研制的新一代雷达均已采用计算机或微处理器,并应用了中、大规模集成电路的数字式信息处理技术,频率已扩展至毫米波段。① 尽管雷达在二战时发展迅速,但追根溯源,此前的科学家运用他们的智慧为此创造了必要的条件。让我们来看下面的简史: 1842年多普勒(Christian Andreas Doppler)率先提出利用多普勒效应的多普勒式雷达。 1864年马克斯威尔(James Clerk Maxwell)推导出可计算电磁波特性的公式。 1886年赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。1888年赫兹成功利用仪器产生无线电波。
matlabsimulink初级教程
S i m u l i n k仿真环境基础学习Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1)在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(SimulinkLibraryBrowser)窗口,如图7.1所示。
图7.1Simulink界面 (2)单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。 (3)在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4)用鼠标单击所需要的输入信号源模块“SineWave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“SineWave”模块就被添加到untitled窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“addto'untitled'”命令,就可以将“SineWave”模块添加到untitled窗口,如图7.2所示。
(5) Scope ”模块(示波器)拖放到“untitled ”窗口中。 (6)在“untitled ”窗口中,用鼠标指向“SineWave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7)开始仿真,单击“untitled ”模型窗口中“开始仿真”图标 ,或者选择菜单“Simulink ”——“Start ”,则仿真开始。双击“Scope ” 模块出现示波器显示屏,可以看到黄色的正弦波形。如图7.4所示。 图7.2Simulink 界面