1642EMC操作手册及排障一些经验

1642EMC操作手册
一:Download 初始化软件
A.硬件连接:CT线、交叉网线各一根,Download 初始化软件时将CT线接到设备的Debug口,交叉线接到设备的Q3口。
CT线及Debug线的制作:如图
B.软件调测步骤:
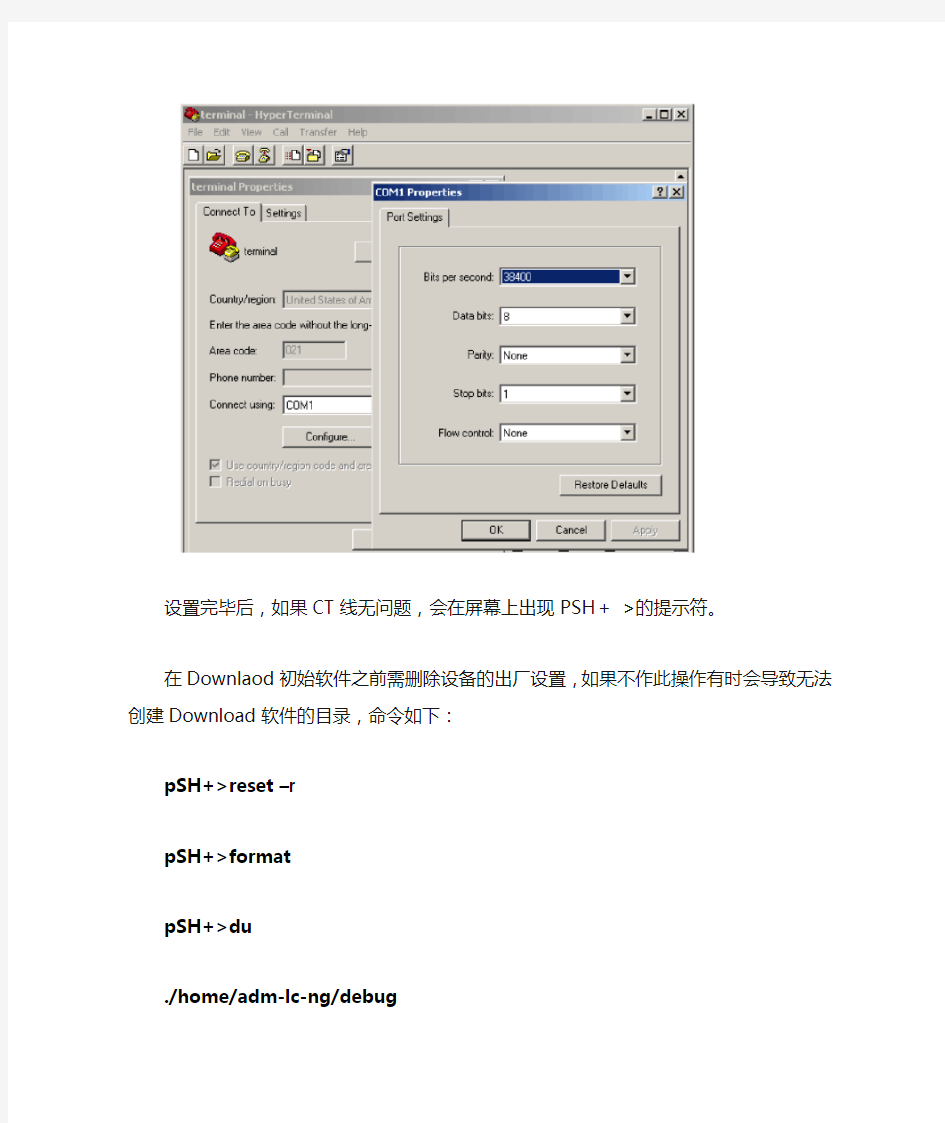
打开超级终端,设置如图:
设置完毕后,如果CT线无问题,会在屏幕上出现PSH+>的提示符。
在Downlaod初始软件之前需删除设备的出厂设置,如果不作此操作有时会导致无法创建Download软件的目录,命令如下:
pSH+>reset –r
pSH+>format
pSH+>du
./home/adm-lc-ng/debug
./home/adm-lc-ng/boardSwVs
./home/adm-lc-ng/config
./home/adm-lc-ng/Database
./home/adm-lc-ng/logs
./home/adm-lc-ng/perfmon
./home/adm-lc-ng
./home
创建Download软件的目录,命令如下:
pSH+>mkdir ./home/adm-lc-ng/boardSwVs /NE_1642
pSH+>mkdir ./home/adm-lc-ng/boardSwVs /NE_1642/EC
pSH+>mkdir ./home/adm-lc-ng/boardSwVs /NE_1642/ES1
pSH+>mkdir ./home/fpga
pSH+>mkdir ./home/mcode
pSH+>du
./home/adm-lc-ng/debug
./home/adm-lc-ng/boardSwVs/NE_1642/EC
./home/adm-lc-ng/boardSwVs/NE_1642/ES1
./home/adm-lc-ng/boardSwVs/NE_1642
./home/adm-lc-ng/boardSwVs
./home/adm-lc-ng/config
./home/adm-lc-ng/Database
./home/adm-lc-ng/logs
./home/adm-lc-ng/perfmon
./home/adm-lc-ng
./home/fpga
./home/mcode
需要注意的是,如果设备需配置ISA板时才需要创建./home/adm-lc-ng/boardSwVs
/NE_1642/ES1目录,否则不用创建此目录。
使用FTP工具通过Q3口为设备Downlaod初始化软件:
Q3口设置IP地址(此地址要与PC的IP地址在同一网段),命令如下:
pSH+>ins_qlan
lan_IP_add (0x00000000): 0xac18d7e0(ip地址要与PC的ip在同一网段)
lan_mac_add (0x000000000000): 0xac18d7e01234
lan_ntwk_mask (0x00000000): 0xffffff00 (ip地址子网掩码要与PC的ip地址子网掩码一致)
生效后会发现本地的link up,之后ping设备看是否能ping通,如果通,则可使用FTP工具为设备Download初始化软件。初始化软件必须Download 到./home/adm-lc-ng/boardSwVs/NE_1642/EC目录下。
Download软件的时间大约为10min左右,软件Down好后需解压缩软件,命令如下:pSH+>ins_boot EC
Insert the equipment type: NE_1642
Insert the application version (V000000): V010000
V010000_0
Version Status:
1 - Active
2 - Standby
Insert your choice: 1
Software Format:
1 - BINARY
2 - IEEE695
3 - ELF
Insert your choice: 1
Insert the application starting address (0x000000): 0x100000 pSH+>reset –p
pROBE+>gs
pROBE+>go
go后软件开始自动解压缩,大约3~4min后会发现本地link up,证明设备已经可以登陆
了(如果此时登陆会发现设备并没有真正的起来,所有的板卡全是RUM告警,这时需要软
件重启设备,重启时间大约为4~5min左右,重启后便可以对设备进行操作),这是其中一
种方法,还有一种是在go后发现设备运行正常,再次reset –p,gs,go,这样再次登陆后就
可以发现设备已经运行正常。
1.配置数据上网管步骤:
将光口设置为“laser force on”
配置LAPD
配置OS地址
配置Local 地址(设备重启)
上网管会出现的几种问题及解决方法:
1.LOS,LOF,DS告警:当设备出现此类告警时,先检察光口是否开“laser force on”
因为有时对端的光口是“ALS enable”状态,碰到此现象需通知网管将对端也设置
为“laser force on”;如果还是不通就要用光功率计测量收光是否正常,1642 EMC
设备155M光口灵敏度为-35dbm左右,发光为-10dbm左右。所以收光控制在-20dbm
最为合适。在处理此问题时最好在对端有人配合,让其测量设备的发光是否正常,
排除设备本身的问题就通知施工队检查光路。
2.CSF告警:CSF告警是本端的告警,当本端的1642设备配置了LAPD,而对端没有配置相应的LAPD,这样会在1642设备端出现CSF告警。将对端配置相应的LAPD
就可解决。但有时会在对端配置完两端都出现CSF告警,引起的原因是延时过长所
造成的,可将本端1642侧的LAPD删掉,与对端同时进行LAPD设置便会解决。
如果还是不能解决,就有可能是EC模块再搞鬼,它可能吊死了,可以将设备重启
试试。如果还是有告警,那就只能检查光路了,将本端与对端的收光严格控制在最
佳的收光范围内。
3.没有任何告警但无法上联网管:这种现象通常是NSAP地址及设备版本的设置与网管不一致,需与网管配合同时检查版本及OS 及Local并确认。
4.上联网管后设备总是自动重启:这种现象通常要先问清网管设备多长时间重启,如果间隔时间很短则先要让网管检查网元是否有配置重复的问题,此问题总是很少有人关注到,但会很误导我们的排障方法(北京建行工程我就有体会西洪门支行老是间隔5min就掉网管,之后又自动上联,后来发现就是网管配置了一个与西洪门支行一样的NSAP地址的网元,让我们废了不少劲,陈易东该打,呵呵),此现象毕竟是少数,如果没有重复则需到现场配合施工队检查光路是否正常(涵盖设备的光口质量),如正常再检查设备是否工作正常,如果本地都不能登陆可能是设备的EC模块fail了,断电重启(必须得到相关单位的确认)还是不能登陆那就只能重新Downlaod 初始软件,要是还不行就只能更换设备了;如果本地能登陆可能是设备的EC模块有问题,可先将两端的LAPD删掉,再重新配置,如果不好可以进行软、硬重启(必须得到相关单位的确认),要是无效,可能是FLASH卡的EC数据紊乱了,可以重新Download初始化软件,要是还是无效那就得更换设备了,5555。
超声波避障小车开题报告
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 设计题目:超声波避障小车 院系:电气学院自动化测试与控制系 班级: 设计者: 学号: 指导教师:周庆东 设计时间:9.2~9.13 哈尔滨工业大学 哈尔滨工业大学课程设计任务书
*注:此任务书由课程设计指导教师填
开题报告 1立项依据 1.1立项目的 (1)设计一辆利用超声波传感器来实现避障功能的小车,使小车对其运动方向受到的阻碍作出各种躲避障碍的动作。 (2)进一步学习单片机原理及其应用,提高程序的编写能力。 (3)掌握单片机系统外扩器件的连接与使用,了解超声波传感器的工作原理。 (4)掌握软件和硬件调试的基本技巧与方法。 1.2立项意义 在当今社会,汽车成为了越来越普遍,人们不可缺少的交通工具。但汽车的不断增加,随之而来就是越来越多的交通事故。交通事故成为了现在越来越严重的安全隐患。所以随着汽车工业的快速发展,我们必须加强对汽车安全性能的考虑。所以,智能汽车概念应运而生,他既是汽车产业的机遇也是汽车产业的挑战。汽车的智能化必将是未来汽车产业发展的趋势,在这样的背景下,我们开展了基于超声波的智能小车的避障研究。 超声波作为智能车避障的一种重要手段,以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用。 2主要设计内容及方案 2.1总体方案 系统采用51单片机作为核心控制单元用于智能车系统的控制,在超声波检测到障碍物之后,主控芯片根据距离值控制直流电机的转动,在与障碍物距离较大的情况下,快速前进,在与障碍物距离较小但还未到达临界转弯方向值的时候,慢速前进。在与障碍物距离很近需要转向避障时,方案上将尝试进行转向,来进行避障。 2.2设计原理 该智能车系统可分为三个主要模块:单片机主控核心模块,传感器避障模块,电机驱动模块。系统主要原理是:通过超声波避障模块(即感测模块)实时监测路面情况并及时传输给单片机。由单片机主控核心模块根据感测模块给予的信息控制小车两电机转动工作状态。电机驱动模块驱动两电机转动,实现前进或者左、右转。
水晶排课操作手册
水晶排课操作说明目录 第一次启动时的界面: (1) 1.设置班级: (3) 2.设置课时: (5) 3.科目节数: (7) 4.教师任课: (9) 5.开始排课: (11) 6.课程表操作: (13) 7.打印窗口 (班级表、教师表、场室表): (15) 8.打印窗口 (总课程表、总任课表): (16) 9.打印调课通知: (17) 10 .设置公共场室: (18) 11.合班设置: (19) 12.科目预设: (20) 13.预排: (21) 14.自定义排课条件: (22) 15.临时调代课: (24) 16.导出工作量: (26) 17.监考表: (27) 18.查询有课或空闲的教师: (30) 19.反导入总课程表: (31) 20.水晶排课免费版与正式版的区别 (32)
第一次启动时的界面: 操作说明: 第一次启动水晶排课后,可以看到如上图的界面。上图因为水晶排课刚安装而基本数据未录入,所以大多数按钮 呈灰色的不可用状态。 基本录入顺序为:“ 1 设置班级→ 2 设置课时→ 3 科目节数→ 4 教师任课→ 5 开始排课”。上一个环节录入完毕,下一个环节的功能就开放,完成“ 5 开始排课”后就可以打开课程表了。 图解: 1 2 3 4 5 6点击录入数据第一步:设置班级。 点击录入数据第二步:设置课时。 点击录入数据第三步:设置科目节数。点击录入数据第四步:设置教师任课。点击开始自动排课。 点击弹出打开课程表菜单,如右图。
7设置公共场室。 8设置合班课。 9预排课程,这是对 3 中的科目预排的整合设置。 10自定义排课条件,该功能跟 5 中的自定义排课条件功能是一样的。 11反导入总课程表。为防误操作,当完成排课后,此处会自动隐藏,但鼠标移上去时还会显示出来。 12点击后会弹出包含着当前界面的基本功能菜单。(在其余窗口也一样,不再重复。) 13关闭水晶排课。 14显示当前界面的相关帮助,快捷键是“F1 ”。(在其余窗口也一样,不再重复。) 15显示怎么购买水晶排课正式版,里面有另有详细说明。 16在线升级:点击后会检查是否有新版本,可以选择是否升级为最新版。 (推荐升级!若网络环境不好,可点https://www.wendangku.net/doc/3d115996.html,/upfile/newver10.exe下载升级包。) 17建立、切换、修改登录的用户。(“浏览者”不能修改数据,“操作员”拥有所有权限。) 18显示正使用着的版本。 19水晶排课的数据库路径。 20打开备份文件,恢复数据。恢复后现有数据就会被这个打开的备份文件所覆盖,切记不能弄错。 21将现有数据另存为一个扩展名为“ .yqd ”的文件。当数据意外丢失时,可能用20 的方法恢复数据。22临时调代课功能:用于学期中途调代课。 23导出工作量表格:可以自动计算出指定时间段内,教师的任课节数。 24监考表功能:可以自动排监考表,导出EXCEL监考表。 25查询基本数据。 26查询空闲教师。 27显示、导出教师课程分布。
雨课堂考试系统操作流程(学生端)
雨课堂考试系统操作手册(学生端) 2020年5月
目录 1. 基本介绍 (1) 2. 手机微信端作答 (1) 2.1 作答入口 (1) 2.2 考试过程 (2) 2.3 查看成绩及答案 (3) 3. 电脑网页端作答 (3) 3.1 作答入口 (3) 3.2 身份验证 (4) 3.3 在线考试 (5) 3.4 查看成绩及答案 (6)
1.基本介绍 雨课堂为师生提供在线考试功能,老师发布试卷后,学生可在手机微信端或电脑网页端作答。如老师在发布设置中勾选了【在线监考】的选项,学生不可使用手机微信端作答,只能使用电脑网页端作答。 雨课堂为考试系统提供了本地的缓存机制,如学生在考试过程中因网络中断而掉线,不会丢失已作答的记录。但为保证考试的正常进行,不影响作答时间,请学生尽量确保自己的网络环境处于良好的状态。 2.手机微信端作答 2.1作答入口 (1)作业提交提醒 老师发布试卷后,学生将在雨课堂微信公众号中收到【作业提交提醒】。如老师在发布设置中未勾选【在线监考】,学生可直接点击该提醒进入作答页面。如老师勾选了【在线监考】,学生将无法用手机作答,【作业提交提醒】的备注中将有提示。 图1 无在线监考时的提醒有在线监考时的提醒 (2)学习日志—试卷 如错过了作业提醒,也可在雨课堂微信小程序中找到试卷并进入。进入雨课堂微信小程序(请使用长江雨课堂和荷塘雨课堂的同学进入对应的小程序),在【我听的课】列表找到对应课程,找到标签为【试卷】的考试,点击进入即可答题。
图2 学生手机端试卷入口 2.2考试过程 雨课堂为在线考试提供单选题、多选题、投票题、判断题、填空题、主观题6种题型,其中主观题可以以文字和图片形式作答,网页版可上传附件。 在考试过程中,学生每填答一道题系统将自动缓存答案,但学生必须点击试卷最后的【去交卷】,才能顺利提交试卷。 考试时长结束或考试截止时间到了以后,试卷将被自动提交,逾时无法再进 行作答。 图3 主观题作答页面
51单片机程序超声波模块避障
#include { TX=1; delay(2); TX=0; } void main() { unsigned char i; unsigned int a; TMOD=0x10; EA=1; TH1=0; TL1=0; ET1=1; while(1) { RX=1; StartModule(); for(a=951;a>0;a--) { if(RX==1) { Timer_Count(); } } } } 教务管理系统 教师用户使用手册 三峡大学理学院 2009-12 目录 一. 进入教务管理系统界面 (3) 二. 教师课表查询 (5) 三. 校本部课程选课名单、点名册、成绩报表查询 (5) 四. 科技学院课程点名册、成绩报表查询 (6) 五. 成绩录入、试卷分析流程 (6) 六. 成绩录入 (6) 七. 试卷分析 (8) 八. 其它查询功能 (8) 一.进入教务管理系统界面 1.三峡大学首页:点击“本科教育”进入教务处 2.教务处首页:点击“教务网络”进入教务管理系统 3.教务管理系统入口:点击“教务管理系统通服务器(非学生使用)” 4.进入教务管理系统:输入用户名、密码、验证码后,进入教务管理系统 二.教师课表查询 左边主菜单中点击“排课系统”主菜单,点击“课表查询”子菜单,即进入教师课表查询页面。页面上半部分显示学院、学年、学期、教师姓名等查询条件,输入相关条件并点击[搜索]后,在页面下半部分将按查询条件显示所输入教师课表。 *老师在开学第一天到教学办领取课表。 三.校本部课程选课名单、点名册、成绩报表查询 左边主菜单中点击“选课系统”,点击“点名册与成绩表”子菜单,进入点名册和成绩报表页面。在页面上半部分显示开课单位、学年、学期、年级、课程、班次、教师等查询条件,输入相关条件点击[搜索]后显示课程列表,在列表中点击[点名册]或[成绩表]将显示相关内容。学年、学期可以选择,默认为当前学期。 四. 科技学院课程点名册、成绩报表查询 左边主菜单中点击“学年制计划任务”,点击 “单科成绩报表”子菜单,进入点名册和成绩报表页面。在页面上半部分显示开课单位、学年、学期班级等查询条件,输入相关条件点击[搜索]后显示课程列表,在列表中点击[点名册]或[成绩报表]将显示相关内容。学院、学院、学期、班级需要自己输入,默认为空。 五. 成绩录入、试卷分析流程 六. 成绩录入 1. 查询课程 左边主菜单中点击“成绩管理”主菜单下点击“按课程”子菜单,系统进入正常考试的课程管理页面。页面上半部分提供了学院、学年、学期和课程。选择后,点击[搜索]按钮,页面的右半部分显示符合查询条件的课程。学年、学期需要自己输入,默认为空。 万维全自动网络考试平台 考试设置操作流程 万维全自动网络考试平台 ........................................................................................................................ 考试设置操作流程 .................................................................................................................................... 全自动网络考试平台考试操作设置流程................................................................................................. 一、考试前准备工作................................................................................................................. 1、考试系统的安装 ........................................................................................................... (1)配置服务端........................................................................................................ (2)配置客户端的安装............................................................................................ 2、为教师分配权限 ........................................................................................................... 3、创建考试试题库 ........................................................................................................... 4、学生管理 ....................................................................................................................... 4.1导入考生信息..................................................................................................... 5、方案管理 ....................................................................................................................... 5.1方案管理 ............................................................................................................... 5.2方案参数设置........................................................................................................ 5.3根据所选方案创建试卷........................................................................................ 5.4分配任务 ............................................................................................................... 6、参数管理 ....................................................................................................................... 二、考试中管理工作................................................................................................................. 7、考试过程中的注意事项 ............................................................................................... 8、启动考试服务 ............................................................................................................... 9、考生登陆考试系统 ....................................................................................................... 10、考生答题 ..................................................................................................................... 11、考生提交试卷 ............................................................................................................. 12、监控管理 ..................................................................................................................... 三、考试后成绩处理工作 ......................................................................................................... 13、考生成绩的查询与统计分析 ..................................................................................... 13.1统计管理 ............................................................................................................. 注意:统计报表必须要四个以上学生完成考试才可以导出。 ..................................... 15、备份/导出服务器数据库 ............................................................................................ 全自动网络考试平台考试操作设置流程 全自动网络考试平台考试流程分为三个阶段,即考试前准备、考试中管理、考试后成绩处理,整体流程如下: 超声波避障传感器在AGV行业中的应用 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 近年来微机技术、人工智能和传感测控技术的飞速发展使得AGV也更加智能化,人性化,使AGV 朝着智能机器人的方向提升。一个功能完善的AGV系统通常由3大部分组成:行走机构、传感系统和控制系统。行走机构是AGV实现运动的基础,决定AGV的运动空间和自由。传感系统决定其导航方式,主流使用激光传感器、超声波传感器、光电传感器、磁传感器、CCD摄像机、红外传感器或者GPS定位。目前在部分已知或未知的环境中运行稳定同时又要求自主执行任务时,AGV 必须要有足够的安全保证,用传感器感知外界环境、分析外界条件,然后通过适当的方式来理解环境,对于工作在复杂或非常规化环境中的自主式AGV,要进一步提高其自主判断能力,依靠自身模式识别及障碍物识别,实现正常工作。对AGV的智能化有很重要的意义。 避障是指移动机器人在行走过程中,通过传感器感知到在其规划路线上存在静态或动态障碍物时,按照一定的算法实时更新路径,绕过障碍物,最后达到目标点。 不管是要进行导航规划还是避障,感知周边环境信息是第一步。就避障来说,AGV行业安全首要考虑,AGV防撞避障可分为两类设计:一是接触式设计,起到防撞保护作用,常用接触类传感器 (如压电传感器,机械式开关等)安装在车体的底部,检测外围非接触式传感器(红外线,超声波,激光等)探测死角,起到缓冲保护作用;二是非接触式设计,起到避障作用,常用非接触类传感器安装在车体稍高正前方和正后方部位,用于车辆前进或者后退时起到避开障碍作用。目前避障使用的传感器多种多样,各有不同的原理和特点,下面我们具体来了解一下超声波传感器在AGV避障中的作用。 目前大面积识别障碍物是超声波传感器在移动应用中的常见任务。物体和人员都可以被识别,从而采取停车或绕过障碍物等动作,保证设备及人员安全。同时,超声波传感器可以实时测量距离,持续监控接近过程,因此在AGV到广泛应用。在防撞应用中超声波传感器防撞的原理是利用超声波遇到障碍物能反射的特性,根据超声波发射与接收的往返时间及声速检测与障碍物的距离,防止与障碍物碰撞。因为超声波发射出来波束是一定的范围空间发射出去的,所以超声波防撞弥补了激光防撞只有水平面防撞的弊端,使得激光无轨导航叉车防撞更全面安全。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。 更多相关内容,就在深圳机械展! 泡泡在线考试系统用户操作手册 2012.3 目录 1、系统概述 (3) 1.1、系统简介 (3) 1.2、系统特点 (3) 2、操作指南 (3) 2.1系统登录 (4) 2.2、基础信息管理 (4) 2.2.1、部门管理 (4) 2.2.2人员管理 (5) 2.2.3权限管理 (7) 2.3试题类别管理 (8) 2.3.1科目管理 (8) 2.3.2单选题管理 (9) 2.3.3多选题管理 (10) 2.3.4判断题管理 (11) 2.3.5填空题管理 (11) 2.3.6问答题管理 (12) 2.4试卷制定维护 (12) 2.4.1试卷管理 (12) 2.4.2试卷制定 (14) 2.5用户试卷管理 (15) 2.5.1试卷评卷 (16) 2.5.2成绩统计 (17) 2.6数据备份还原 (18) 2.6.1数据备份还原 (18) ?说明日期设计修改审核工程名称: 在线考试系统文档号: AK0013 ? 1.0 2010-4-1 许四光侯志昌汪红兵文档名称: 用户操作手册打印日期: 2013-7-27 1、系统概述 1.1、系统简介 泡泡在线考试系统是针对企业、教育单位而设计的新一代纯B/S架构通用网络考试系统,全面实现了考试工作的网络化、无纸化、自动化。该系统可用于Internet和局域网在线考试,最多可以承载上千人的同时在线考试任务,而且对服务器的配置要求非常低,客户端不用任何设置。通过强大的后台设置功能,用户可以根据自身需要设定考试功能,几乎能满足企业、教育单位的所有需求。 泡泡在线考试系统基于SQL Server数据库平台,能够容纳大量的专业知识题库,为客户端提供更快和更稳定的运行环境。系统采用B/S架构,无需安装客户端,管理员和考生均可以凭帐号和密码访问系统,便于使用、维护和升级,并能够与企业现有的Intranet无缝集成。 1.2、系统特点 为实现项目的总体目标,应遵循“突出实用性、体现高效性、兼顾美观性”的总体设计原则,具体说来,在开发时遵循了以下原则: 1)、可靠的考试引擎技术,良好的系统稳定性:经过上千次测试,系统性能稳定, 可承担大规模在线考试,同时系统还具有系统备份和还原功能。 2)、灵活的组卷功能:支持人工生成试卷、随机生成试卷等多种组卷模式。 3)、丰富的题型支持,全面满足传统考试需求。 4)、考试支持自动判卷和人工判卷相结合。 5)、完善的考试监控功能:管理员可以及时查看在线考试的考生身份、登陆时间、 得分等情况。 6)、强大的分级管理功能:用户可根据需要设定不同科目、部门的题库。 7)、良好的统计分析功能:管理员可以对所有或部分考生成绩进行查询、统计、分 析。 8)、多种防防舞弊功能:采用多种技术防止考生在考试过程中舞弊,提高考试的权 威性和公正性、例如:考生考试页面控制技术、随机取题技术、试题随机乱序技术 等,有效的避免了考试舞弊情况的发生。 9)、开放的系统拓展功能:可以方便进行扩展和其它系统进行数据交换和集成。 ?说明日期设计修改审核工程名称: 在线考试系统文档号: AK0013 ? 1.0 2010-4-1 许四光侯志昌汪红兵文档名称: 用户操作手册打印日期: 2013-7-27 南 京 理 工 大 学 毕业设计说明书(论文) 作 者 : 薛玉洁 号: 6 教 学点 : 工业职业技术学院 专 业 : 电子工程 题 目 : 超声波在小车避障技术的应用设计 指导者: (姓 名) (专业技术职务) 评阅者: (姓 名) (专业技术职务) 倪瑛 副教授 副教授 戴娟 2013 年 5 月 毕业设计说明书(论文)中文摘要 毕业设计说明书(论文)外文摘要 目次 1 引言 (1) 1.1 研究背景与意义 (1) 2 超声波的避障技术 (4) 2.1 小车的避障技术 (4) 2.2 超声波的传播特性 (5) 2.3 超声波测距技术 (5) 2.4 基于单片机的超声波测距系统 (6) 2.5 超声波的衰减 (6) 3 超声波避障系统硬件设计 (8) 3.1 方案概述 (8) 3.2 方案设计 (8) 3.3 元器件介绍 (9) 3.4 超声波发射系统电路 (16) 3.5 超声波接收系统电路 (16) 3.6 相关软件、电路模块和器件清单。 (17) 4 超声波避障系统的软件设计 (19) 4.1 直流电机控制软件设计 (19) 4.2 超声波测距模块软件设计 (19) 4.3 超声波避障技术软件设计 (21) 4.4 软件与硬件的整合软件与硬件的整合 (22) 5 超声波避障系统调试 (23) 5.1 调试过程 (23) 5.2 问题分析 (26) 5.3 误差分析 (26) 致 (29) 参考文献 (30) 1 引言 1.1 研究背景与意义 随着机器人技术的发展,自主移动机器人以其活性和智能性等特点,在人们的生产、生活中的应用来越广泛。自主移动机器人通过各种传感器系统感知外界环境和自身状态, 在复杂的已知或者未知环境中自主移动并完成相应的任务。而在多种探测手段中, 超声波传感器系统由于具有成本低, 安装方便, 不易受电磁、光线、被测对象颜色、烟雾等影响,时间信息直观等特点, 对于被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力, 因此在移动机器人领域有着广泛用。 本设计主要体现多功能小车的智能避障模式,设计中的理论方案、分析方法及特色与创新点等可以为自动运输机器人、采矿勘探机器人、家用自动清洁机器人等自动半自动机器人的设计与普及有一定的参考意义。同时小车可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。 智能小车系统最诱人的前景就是可用于未来的智能汽车上了,当驾驶员因疏忽或打瞌睡时这样的智能汽车的设计就能体现出它的作用。如果汽车偏离车道或距障碍物小于安全距离时,汽车就会发出警报,提醒驾驶员注意,如果驾驶员没有及时作出反应,汽车就会自动减速或停靠于路边。 超声波测距与避障系统包括硬件及软件两个部分。硬件开发基STC89S52微控制器,集成了传感器电路、信号处理电路、微控制器外围电路及电源电路等;软件设计主要包括测距算法设计和避障算法设计。其中,避障算法由单传感器避障策略、多传感器精确避障策略以及多传感器模糊避障策略组成。 研究生处管理系统排课操作说明 第一篇制定新生培养方案 1.本年培养方案可在去年培养方案的基础上进行修改。如果没有变化则直接调入即可;如果有变化调入后,再进行微调。如下图: 2.调整导入后的培养方案,如下图 3.调整分组。根据本年培养方案进行课程和分组的调整。 分组一般为:学位基础课组;学位选修课组;补修课。每组的总学分请根据各专业培养方案来定。 如果现有分组不对,可勾选任一分组,单击取消分组,如下图。 新建分组时,可以依据每组的课程门数或总学分进行选择。只能选择一种方法,建议以学分分类进行分组。 4.培养方案中“课程性质(基础课、选修课)”和“开课学期”等信息,可以根据专业设置情况进行变更,如下图。 第二篇排课工作 如果培养方案没有变化,原则上可以参考以前相关学期的排课信息,比如本次排课可以参考2015-2016春学期的排课信息。 1.第一步:新增 2.第二步:选择课程 课程班级名建议采用“年份-专业-课程名”:如17-档案学-档案管理学.(注意:先选择课程,然后再修改课程班级名)适合请填,否则无法打印专业课表。 如果上图2中没有查到相关课程,但是培养方案中有,请到“培养管理-基础数据管理-课程库维护”中找到该课程信息,进行修改,并设置为“开课”。具体设置见以下两图 3.安排上课时间及教室 (1)如果希望自己网上选课,请“网上选课”进行勾选;如直接指定学生可以不选; (2)选择该课程适合的专业; (3)安排上课时间、教室和教师 如使用本学院教室,选本学院名称;如果使用研究生处公共教室,选择研究生处名称。 如一门课40学时,一周上4节课,可设置如下: 第1周到第10周,每周上课4次课,正好安排完,设置如下图。 龙源期刊网 https://www.wendangku.net/doc/3d115996.html, 移动机器人超声波测距避障系统设计 作者:李恒徐小力左云波 来源:《现代电子技术》2014年第03期 摘要:测距避障是移动机器人适应未知复杂环境的能力之一,准确测出移动机器人和障碍物之间的距离是关键。以dsPIC33FJ256MC710单片机为核心研究设计了一种移动机器人超声波测距避障系统。该系统利用脉冲回波法测距,针对超声波在空气中的传播速度受环境温度的影响,设计了超声波速度温度补偿电路。实验结果表明该超声波测距避障系统测量数据准确,能够满足移动机器人在复杂环境中避障的需求。 关键词:移动机器人;测距避障;超声波;硬件电路 中图分类号: TN710?34; TP73 文献标识码: A 文章编号: 1004?373X(2014) 03?0157?03 Design of obstacle avoidance system with ultrasonic ranging based on mobile robot LI Heng, XU Xiao?li, ZUO Yun?bo (Ministry of Education Key Laboratory of Modern Measurement & Control Technology,Beijing Information Science & Technology University, Beijing 100192, China) Abstract:Obstacle avoidance with ranging is one of robot′s competencies in adapting to unknown complex environment. It is very important to measure the distance between the robot and the obstacles accurately. An obstacle avoidance system with ultrasonic ranging by mobile robot is designed with dsPIC33FJ256MC710 as the core. The distance between the robot and the obstacles is measured with pulse echo method. Ultrasonic velocity temperature compensation circuit is designed for ultrasonic velocity changes as the ambient temperature. Experimental results show that the system ranging accurately and is able to meet the requirement of obstacle avoidance for mobile robot in complex environments. Keywords: mobile robot; obstacle avoidance by ranging; ultrasonic; hardware circuit 0 引言 在某些特种环境,如反恐排爆、灾难救援等现场,特种机器人被广泛地用于代替人类执行信息获取、搜索救援、环境检测等工作。作业环境的复杂多变,要求特种机器人有较好的环境适应能力,能够在未知或者部分未知的环境中通过传感器获取周围环境信息,包括障碍物的尺寸,位置和距离等信息,并使机器人找到一条无碰撞最优路线[1]。移动机器人测距避障的传 校务通系统 用户手册 校务通系统操作手册 一、功能概述 本系统主要为解决2018年新高考制度实施后,中学的教学模式转变过程中产生的一系列管理难题。即当前经常提到的『选课走班』 二、操作步骤 2.1登录系统 2.1.1管理员、教务专员登录进入校务通,点击页面上方齿轮图标,可以看见这些模块 教学:科目、课程、教室类型、教室、导师班、操行评定细则 人员:学生、家长、教职工、分层学生 教学计划:自动组班、排课工具箱 教学运行:教学班、学生选课、选老师统计、课程表、学生定位、选导师、预选老师、实选老师、学生调课 教学评教:教师评学、学生评教、学生考评、考评明细、考评评定、操行明细 成长档案:学生故事 科目操作:科目组合、选科目统计、科目统计详情、学生选科目、选科目资源评估 成绩处理:成绩单 学校:设定、学年、学期、公告 系统管理:枚举、系统日志、数据审计、数据导入中心、系统消息、系统角色、授权、修改密码 2.1.2其他系统角色:教师、学生、家长进入校务通的页面根据自己的角色不同显示的功能模块会有所变化 3.1教学/科目 科目模块中可以维护学校的所有科目,可以新建、导入、导出、查询科目 4.1教学/课程 课程模块可以维护学校所有的课程,包括走班课程,不走班课程,校本课程。 可以新建、导入、导出、删除、查询课程 走班的课程,开班数可以自己维护 不走班的课程,开班数不用维护,就是默认的不走班的导师班的数量 校本课程,开班数可以自己维护 5.1教学/教室类型 教室类型模块可以维护学校所有的教师类型,可以新建、导出、查询教室类型 6.1教学/教室 教室模块可以维护学校所有的教室,可以新建、导入、导出、删除教室 7.1教学/导师班 导师班模块可以维护学校所有的导师班,可以给导师班设置文理科,指定教室,指定导师,设置班级人数上限,是否走班。可以新建、导入、导出、删除、查询导师班 8.1教学/操行评定明细 快捷排课 2.0 使用说明书 说明书版本 v1.1 提示:在阅读本文档时在菜单栏里点击 —[视图]—[文档结构图 ],可以快速方便地找到您要看地内容 排课模块 排课基本流程 : 录入基本数据 录入选课信息 设置约束条件 电脑自动排课 人工调课 查询打印输出 新建 /打开 /保存课程表 程表 ] 弹出新建课程表对话框 ,选择一个位置 ,输入一个文件名 提示:最好把文件名地名字以学期命名 ,以便以后打 开课程表时好找 , 比如:“ 2018--2018 第一学期课程 表”等 建议:强烈建议不要把课程表保存在系 统盘 <一般是 盘 >,请保存在其它盘 .还 有"我地文档 " "桌面 "也最好不要 ,因为它 们一般也是属于系统盘地 , 当系统崩溃 , 要重新安装系统时 ,会导致课程表文件 保存课程表 : 当课表数有改动 ,包括各种信息录入、选课、条件限制、总课表、代课、放假等 .请点击 [ 保存课程表 ],才能把您做 地改动保存到课程表文件里 ,只有点击保存后下次打开课程表才会是您本次修改后地 . 备份课程表 : 即把当前操作地课程表文件复制拷贝一份 . 打开课程表: 打开一份已有地课程表 . 注:当软件启动后会自动打开您上一次关闭软件之前操作地课程表 当成功打开某个课程表文件后 ,在软件主界面左下角会显示打开课程表地信息 ,如果没有任何显示则表示当前没有 打开任何课程表 .如下图: 信息录入模块 信息录入模块包括: 学期 /课节、科目信息、年级、班级、教研组、教师、教室 <场地) 新建课程表 : 点击[新建]按钮即可. 如下图 :点击软件右上角地 .在弹出地菜单里点击 [ 新建课 被删除 微厦在线考试(试题练习)平台 操作手册 1建设内容 微厦在线考试(试题练习)平台主要分为两大块学员管理和管理员管理,学员在系统中的主要职责是在线学习、在线练习、在线考试、充值消费;管理员主要负责系统日常任务的分配和管理,如:教务管理、题库管理、资金管理、员工管理等。 1.1学员管理 学员在系统中主要是学习和消费,学员进入系统后主要对以下六个模块的内容进行操作:章节练习、模拟场、考试指南、错题重做、我的笔记、我的收藏、统计分析、联系客服、个人中心,如下图: 学员进入系统后如果未购买课程,可以对系统中的课程进行试用,试用的题数可以管理员后台自定义,试用分为两种情况:一、游客试用(即未登录试用);游客试用时只能操作章节练习、考试指南、联系客服这三个模块的内容,游客操作其他模块会自动跳转到登录界面。二、登录试用;学员登录试用时可以操作除“模拟考场”之外的所有模块,学员购买科目试题后方能操作全部模块。 点击右上角的“”可以切换专业,也可以查看“我的科目”,如下图: 点击其他专业则会切换到其他专业下的科目学习,点击“我的科目”可以查看“当前科目”和“已购买的科目”。如下图: 1.1.1章节练习 学员第一次登录后操作任意模块都会进入专业选择,学员选择相关专业和科目后才能进行学习,级别划分是:专业>>>科目>>>章节,学员学习时针对“科目”进行充值消费,科目有多个章节,这里的“章节练习”包含了该科目下的所有章节。如下图: “章节练习”即试题练习,主要是对章节里的试题进行练习和学习。学员在练习时可以查看试题的答案和解析。对于一些难题、错题、易考题学员可以收藏, 收藏后收藏按钮会变成红色,笔记功能有助于学员在学习过程中记录自己的解题思路,帮助理解加深记忆。左右滑动可以切换上下题。 点击“提交”按钮后系统会自动对该题的答案做出批阅,如下图: 如果该试题有错误,学员可以点击右上角的“报错”向系统提交错误报告,错误报告在管理员后台查阅。如下图: 1.1.2模拟考场 模拟考场中存储了科目下的所有试卷,学员可以随时进行模拟测试,如下图: 如上图所示右上角是计时器,显示该场考试的剩余时间,点击“”可以收藏试题,收藏后“”按钮会变成“”点击“”可以报错。最下方是答题卡和提交按钮,答题卡按钮提示了当前已做答的题数和全部试题数,点击可进入答题卡界面。如下图: 如上图所示,蓝色背景的试题序号表示已作答的试题,点击“试题序号”可以自动定位到该试题,点击“交卷”可以交卷,交卷后系统会自动给出得分,学员也可以在“统计分析”中查看详细的成绩报告。 1.1.3考试指南 考试指南类似于教学大纲,明确重点、难点、考点,帮助学员轻松掌握,顺利通过考试。由管理员后台录入。 1.1.4错题重做 错题重做收录了学员每次在练习中做错的试题,相当于一个错题集。如下图所示: 点击试题题干可以查看该试题的答案和笔记,点击“进入答题”可以练习这些错题,重点学习。如下图: 超声波避障小车设 计 Harbin Institute of Technology 课程设计说明书(论文) 设计题目:超声波避障小车 院系:电气工程及自动化 班级: 1 21 设计者:张佳炜 学号: 11 0316 指导教师:周庆东 设计时间: .09.14- .09.25 哈尔滨工业大学 课程设计考核表 题目:超声波避障小车 学生姓名:张佳炜班级: 1 21 学号: 11 0316 实验部分考核 总结报告评分 总成绩:指导教师签字: 哈尔滨工业大学课程设计任务书 开题报告 1立项依据 1.1立项目的 (1)设计一辆利用超声波传感器来实现避障功能的小车,使小车对其运动方向受到的阻碍作出各种躲避障碍的动作。 (2)深入学习单片机原理及其应用,提高程序的编写能力。 (3)掌握单片机系统外围电路的设计,了解超声波传感器的工作原理。(4)掌握软件和硬件调试的基本技巧与方法。 1.2立项意义 汽车作为人们不可缺少的交通工具,给人类带来了极大的便利,但随着汽车的量越来越多,交通事故也越来越多。交通事故成为了现在越来越严重的安全隐患。我们必须加强对汽车安全性能的考虑。随着电子技术、信息技术、网络技术的发展,智能汽车概念应运而生,将电子信息网络和汽车接合起来实现汽车的智能化,是传统汽车产业的机遇也是的挑战。汽车的智能化必将是未来汽车产业发展的趋势,在这样的背景下,我们开展了基于超声波的智能小车的避障研究。 超声波具有穿透力强、方向性好、操作简单、方便、快速和安全等的特点,在很多 领域有着广泛的应用前景。超声波作为智能车避障的传感信号,以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。作为一个发展大 正方现代教务管理系统WEB端系部用户手册 杭州正方电子工程有限公司 学生管理 学籍管理 信息维护 a、学生基本信息、家庭信息、入学成绩的维护。 点击增加或修改,弹出如下操作窗口: 学籍异动 a、学籍异动主要功能:统计,异动处理,转专业学生异动处理,退学、休学、复学、转专业通知单输出。 信息查询 该功能可查询学籍管理子系统各表中的信息; 学生名单打印 该功能可按学院、学年、班级打印注册收费表、成绩登记表、在校生名单; 学生人数分类统计 具体操作:①选择需统计的年纪、学院、专业、班级; ②选择需显示的统计选项(性别、学院、系等); ③从按条件查下拉菜单中选择条件(是否注册、是否在校、是否有学籍); ④在条件关系复选框中确定步骤③中条件的关系(与、或); ⑤单击统计按钮,完成统计工作; 如:需要统计2004级,法学院,法学专业,已注册且在校学生的性别 ①选择2004,法学院,法学(班级可以不选); ②在统计选项栏,将性别选中; ③在按条件查下拉菜单中,选择是否注册、是否在校(菜单下拉两次,两次结果自动选入,在这里选择的是否注册、是否在校表示学生已注册、学生在校); ④在条件关系复选框中,选并且(是否注册并且是否在校表示学生已注册并学生在校); ⑤单击统计按钮,系统自动出现所需要统计信息; 高基报表 高基2-1-2普通本、专科分专业学生数 高基2-2普通本、专科生年龄情况 高综3-1-2普通本、专科分形式、分学科学生数 全校学生人数统计表 该功能按学院为单位完成对全校学生人数的统计; 学生组合统计 该功能可分班统计人数、分校区统计人数、学生变动情况,可对学生信息表、学生家庭表、学生异动表等多种表组合起来查询; 师资管理 教师密码查询 输入教师工号,点查询,即可查询教师密码。查询权限一般放在系统管理员或主管人事部门负责人。 如果教师信息已经存在,只需要增加、删除、修改为数不多的教师信息,则可在教师信息维护操作界面下直接进行。 对教师的工作量系数可进行单个修改,界面右击提供考试分配是否可用功能。 教学计划管理 落实教学任务的流程图 a教务管理系统教师用户使用手册
万维全自动考试系统操作手册
超声波避障传感器在AGV行业中的应用【技术分析】
在线考试系统操作手册
超声波避障技术设计说明
研究生处管理系统排课操作说明
移动机器人超声波测距避障系统设计
校务通用户手册
排课软件快捷排课使用说明书
在线考试系统-操作手册
超声波避障小车设计
正方现代教务管理信息系统操作手册
- 自动化测试平台操作手册
- 广东省自学考试管理系统操作手册
- 教务管理系统学生英语等级考试报名操作手册
- 广东省自学考试管理系统操作手册
- 在线考试系统学生使用手册
- 贵州信息技术学业水平考试系统操作手册
- 考试系统操作手册
- 在线考试系统操作指南
- 网上考试系统操作指南-课程考试篇
- 雨课堂考试系统操作手册(教师端)
- 山西初中信息技术考试系统操作手册
- 在线考试系统操作手册
- 在线考试系统-统一考试管理-操作手册
- 郑州大学现代远程教育学院-网上考试系统-用户使用手册
- 在线考试系统-操作手册
- 在线考试系统操作指南
- 在线考试系统使用说明书
- 在线考试系统-操作手册
- 在线考试系统操作指南
- ATA_5.4考试管理系统使用手册