VMT SLS-RV 隧道盾构导向系统

SLS-RV
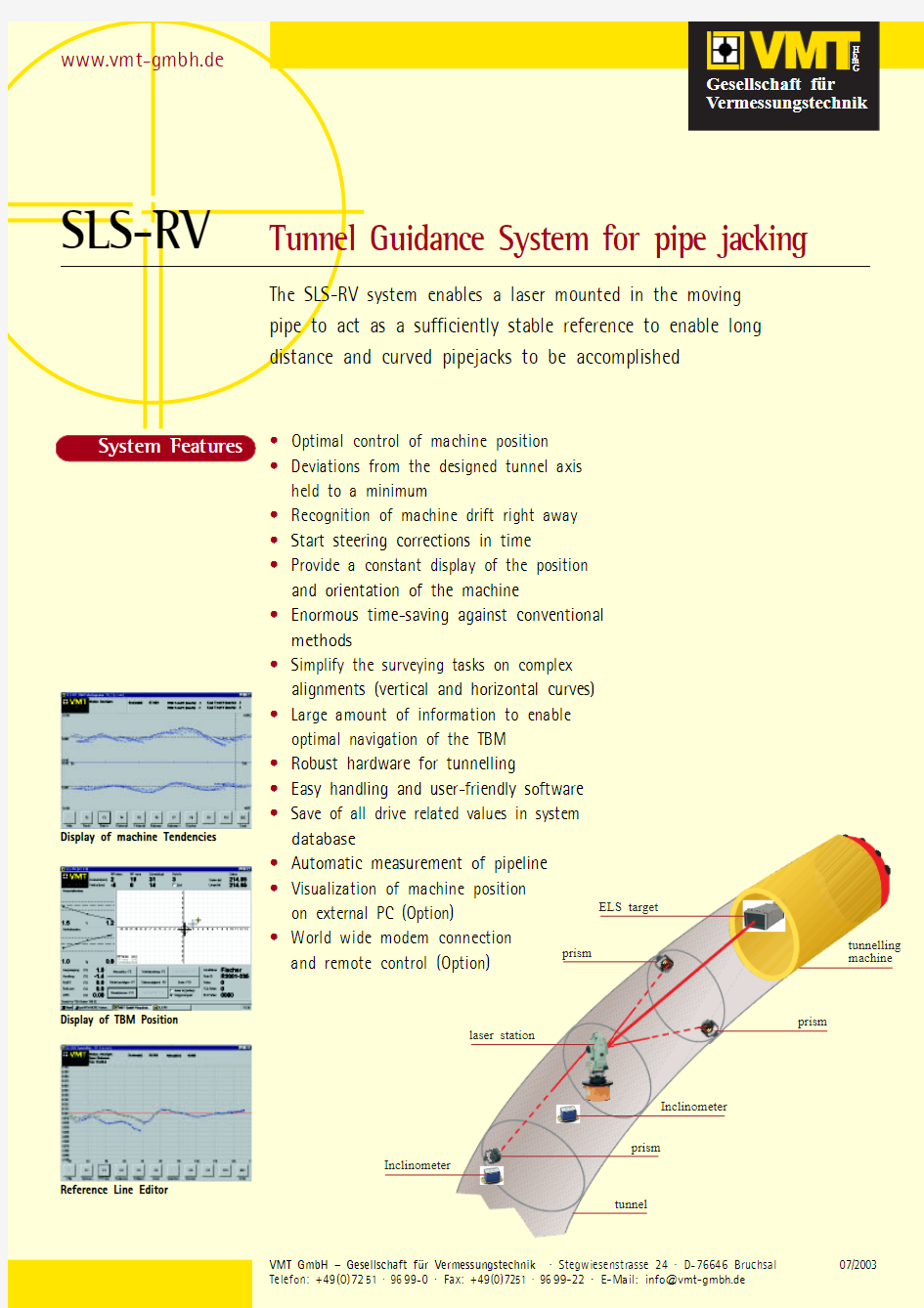
Tunnel Guidance System for pipe jacking
System Features laser station
prism
Inclinometer Inclinometer
tunnel
prism
tunnelling machine
prism
ELS target
The SLS-RV system enables a laser mounted in the moving pipe to act as a sufficiently stable reference to enable long distance and curved pipejacks to be accomplished
?Optimal control of machine position
?Deviations from the designed tunnel axis held to a minimum
?Recognition of machine drift right away ?Start steering corrections in time
?Provide a constant display of the position and orientation of the machine
?Enormous time-saving against conventional methods
?Simplify the surveying tasks on complex alignments (vertical and horizontal curves)?Large amount of information to enable optimal navigation of the TBM ?Robust hardware for tunnelling
?Easy handling and user-friendly software ?Save of all drive related values in system database
?Automatic measurement of pipeline ?Visualization of machine position
on external PC (Option)
?World wide modem connection
and remote control (Option)
Display of machine Tendencies
Reference Line Editor
Display of TBM Position
SLS-RV
Tunnel Guidance System for pipe jacking
For the guidance of extended distance and curved pipe jacked tunnels
1
`
Introduction
D
rivers of Tunnel Boring Machines (TBM) need continuous information about how the machine axis is positioned and oriented with respect to its Designed Tunnel Alignment (DTA).At the advance rates of several centimetres per minute that are common now, the driver must have immediate feedback about the consequences of his control actions in order to keep the machine as close as practical to the DTA.
The SLS-RV Guidance System for Pipe Jacking gives users continuously updated information about the spatial position and orientation of the TBM. Thus,through properly controlled steering actions, the TBM can be kept within a narrow tolerance circle around the DTA.
The main reference of the SLS-RV system is supplied by a visible laser beam projected from a Laser theodolite which is initially moun-ted in the shaft in an area that is relatively stable. This laser beam will typically project for a distance of between 100 – 200 m depending on the power of the laser, the atmospheric conditions in the tunnel and the amount of refraction that the laser beam is subjected to.The laser beam passes through the clear space in the machine and back-up equipment (laser window)to the target mounted on the forward part of the machine. The useable laser to target distance is also dependent on the size of the
laser window and the curvature of the tunnel.
When the laser beam strikes the ELS Target the precise centre of the beam relative to the centre of the target is measured. The horizontal angle at which the laser beam strikes the ELS Target is also de-termined. Installed within the ELS Target is a dual axis inclinometer transducer to monitor the pitch and roll of the ELS Target. Attached to the front of the ELS Target is a retro-reflective prism. The distance be-tween the laser reference position and the ELS Target is measured by the EDM within the theodolite. Therefore from the knowledge of the absolute position of the laser reference, the absolute position and orientation of the ELS Target and hence the position and orientation of the TBM can be established.This information is combined with the desired alignment of the drive to give the machine operator a simple indication of where the machine is,relative to where it should be. The SLS – RV system not only provides a way of measuring the precise position of the TBM at any time –especially during the course of an advance. It presents these results to the operator in a clear, concise manner allowing him to take the necessary corrective measures.Apart from an enormous time saving, it also provides a uniform,smooth tunnel advance closely following the DTA.In pipe jacking, it is essential to avoid sudden changes in direction and in point loading the outer edges of the pipe, as damage in the area of the seal cannot be tolerated if the water tightness of the drive is to be maintained. Changes in direction cause more resistance to the movement of the machine and all the following pipes, requiring greater hydraulic forces to over-come this increased resistance In the case of pipe-jacking however, there is one fundamental difference in the supply of the guidance information to the machine operator. This is the po-sitioning of the laser reference in a stable position once the machine has advanced to a point where the laser beam can no longer activate the ELS Target from the start shaft.At this point the laser reference must be positioned within the moving pipe. As soon as the laser reference is no longer in a stable position, it is necessary to accom-modate this fact.
The following assumptions are made and additional information is recorded.
The basic assumption that is made in pipe jacking is “the pipe will follow the hole made by the machine”. This is not always valid and adjustments are sometimes necessary in the subsequent calc-ulations. However it is a good basis on which to commence this description.
SLS-RV
Tunnel Guidance System for pipe jacking
2
`
Operating Principles
The position of the machine is recorded throughout the drive at frequent intervals. When it is necessary to install the laser in one of the moving pipes, the position of the centre of that pipe will be known from the records, i.e. the po-sition of the machine at the same chainage. However the orientation of the pipe will almost certainly be different from that of the machine.If the laser reference is not in the precise centre of the pipe, any roll on that pipe will cause a positional change for the laser reference. The roll of the pipe is therefore measur-ed by an inclinometer and the roll-corrected value for the laser refer-ence position can be calculated.In order to maintain the laser orientation at a constant elevation and thus eliminate the effect of any pitching of the pipe from the calculations, the laser theodolite is mounted on a self-levelling plat-form. This overcomes any move-ment of the pipe due to both pitch-ing and rolling, and maintains the theodolite within its compensator setting range.
The azimuth of the laser refer-ence is determined with respect to a backsight target. When this back-sight target is mounted in a stable position (i.e. the start shaft) the determination of the azimuth is straightforward. However, as soon a it becomes necessary to mount the backsight target into a moving pipe it is also necessary to use the re-corded values of the machine position at a given chainage to determine the position of the pipe containing the backsight target at the same chainage. It is also neces-sary to monitor the roll of the pipe with an inclinometer to give a roll-corrected position for the backsight target.
Using these values to precisely determine the instantaneous po-sition and orientation of the laser reference, it is possible once again to show the operator the position of the tunnelling machine in relation to the desired alignment.
In practice however, the accuracy achieved by following these basic assumptions together with external effects such as irregularities in pipe manufacture, extreme overcutting or a tight radius curved alignment, is not sufficient to achieve the required tolerances specified for the drive. It is therefore necessary to carry out periodic control surveys to replace the recorded machine position data with measured survey data. These control surveys should be carried out at intervals of not greater than every 100m.
It has also been found that the dynamic behaviour of the pipes due to variable ground conditions and the varying hydraulic forces applied during the mining operation show significant differences to the measurements taken during static control surveys. It has therefore proved necessary to update the recorded data on the course follow-ed by the pipes between control surveys.
The advent of motorised laser theodolites has enabled a more frequent, automatic measurement cycle to be undertaken between control surveys.
This measurement cycle not only gives updates on the position and orientation of the laser but also of the position of a reference pipe a short distance ahead of the laser.The position of this reference pipe is recorded and stored as the reference line which the system uses as its working record of the pipe line’s position. This reference line can be modified (smoothed) by the user to take into account the anomalies
A VMT concept Laser Theodolite
that occur during this precise measurement cycle to produce a more realistic reference for guiding the drive. The complete system is installed in the front region of the pipeline, where refraction typically does not cause significant problems.
System Components
All components have been extensively tested on running TBM’s and have been thoroughly tried and tested in the harsh environment of numerous pipe jacking projects.They are briefly described below Active ELS (electronic laser system)
The Target receives the laser beam. It determines the point of incidence in a horizontal and vertical direction. In addition, the roll and pitch are measured by integrated inclinometers. The yaw angle is ascertained from the angle of incidence of the laser on the ELS.The ELS is fixed to the TBM body, its position having been determined when it was installed. A prism for electronic length measurement is mounted directly below the ELS.Controller Unit
At laser station supplies power for theodolite, AD-12, inclinometer,backsight target inclinometer and length measurement system. It multiplexes data from inclinome-ters, length measurement system and laser theodolite and provides data communication with the control PC.
Laser Theodolite
The VMT concept Motorized servo Laser Theodolite, (Leica TCA1103 /ATR / GUS74) complete with PC control and automatic target re-cognition (ATR2), allowing precise targeting of the prism, is a precision
SLS-RV Tunnel Guidance System for pipe jacking 3
The Guidance Sytem
is operated by Touchscreen geodetic measuring instrument for
measuring (horizontal and vertical)
angles and distances and projecting
a visible laser reference beam.
Automatic tribrach AD-12
Automatic tribrach for self-
levelling of the laser station within a
±10 gon range. Levelling is carried
out continually with an accuracy of
± 1 mgon.
Inclinometer on laser station
Inclinometer fixed on bracket of
total station, determines the current
roll angle of the station and
transmits this data to the control PC
via the Controller Unit.
SLS-RV Industrial PC
Computer station at operator
position where all the data
determined is automatically
combined and evaluated. The
information is displayed on the
monitor in numerical and graphical
form. The TBM position can thus be
seen at a glance. Used for
evaluating and saving all geo-
metrically relevant measured data.
Backsight target.
Standard, round retro-reflective
prism as rear backsight target. Used
in automatic mode as direction ref-
erence. Recognised and measured
by the ATR2 target recognition unit.
Inclinometer at backsight target
Fixed inclinometer on the
bracket of the backsight target,
determines the current roll of the
station and transmits the data to
the Controller Unit.
Left and Right reference-point
prisms in front of the laser station
Two Standard round retro-
reflective prisms known as
reference targets are located in a
reference pipe approx. 12 m in front
of the laser station. Their purpose is
to allow measurement of the actual
position of the advancing tunnel as
directly in front of the laser station
as possible, so that any variance
between the pipes measured
position and that of the theoretical
position of the TBM at the same
station can be determined.
Length measurement system
Wheel mechanism mounted in
start shaft on pipeline. When the
pipeline is inserted by means of the
main jack system, the impulses
generated by the measurement
wheel are transmitted for
computation.
Set of Interconnecting Cables
All cables to connect the
individual components of the
system.
TBM Position Software module
It forms the heart of SLS-RV
system. It receives data from all the
above-mentioned components. The
TBM position is calculated in the
Tunnel Advance Software. Display is
graphical and numerical. Ease of
operation is ensured by the
Windows user interface.
Reference Line editor
A graphical module allows the
reference point axis generated to be
checked and edited when necessary.
It allows smoothing, removing of
erroneous values, and allows a new
reference point axis to be generated
following a control survey.
Reference Pipe
Remote Operation
Modem
(option)
Distribution
Box 1
SPS (TBM PLC)
TBM Laser Station
Control Cabin
Industrial PC
LMS*
* Length
Measurement
System
Backsight Target
Backsight Target
Reference Target
Reference Target Inclinometer
Inclinometer
Start Shaft
Controller Unit
Theodolite
Hardware Configuration
`
盾构下穿建筑物专项施工方案
盾构隧道下穿建筑物专项方案 一、编制依据 1、珠江三角洲城际快速轨道交通广州至佛山段工程18标南洲站?沥滘站区 间平纵断面及洞门设计布置图; 2、珠江三角洲城际快速轨道交通广州至佛山段18 标工程南洲站?中间风井建筑物调查报告; 3、珠江三角洲城际快速轨道交通广州至佛山段18 标工程南洲站?中间风井区间盾构推进监测方案; 4、《地下铁道工程施工及验收规范》 (GB 50299-1 999)(2003 年版); 5、《盾构法隧道施工与验收规范》 (GB 50446-2008) 6、《建筑地基基础设计规范》 (GB 50007-2011) 二、工程概况 2.1 工程简介珠江三角洲城际快速轨道交通广州至佛山段南洲站?沥滘站区间(简称“南沥区间”)位于广州市海珠区。本次设计起点为南洲站,终点为沥滘站。 根据广东广佛轨道交通有限公司穗铁广佛建会【2012】68 号会议纪要,盾构从南洲站始发,中间风井吊出;再根据拆迁情况而实施从沥滘站始发,中间风井吊出。起点为南洲客运站、向东南方延伸,途经南环立交、沥滘水道,进入沥滘村。区间沿线地形平坦,地面高程为7.87?10.32m,沥滘村沿线密布建筑物群。 盾构区间上方主要有南环高速公路等构筑物;沿线两边主要有南洲大酒店 (A7)、大量居民房等建筑物。 工程由两台①6250海瑞克复合式土压平衡盾构机进行施工。先后施工上行线和下行线隧道,盾构从南洲站东端头下井始发,掘进至中间风井吊出。 本区间隧道由上、下行线两条隧道构成,区间最大覆土厚约32.2 米,最小覆土9.5 米。区间最小曲线半径为350 米,线间距约12.5 米。线路纵坡设计为双向坡,最大坡度为29%°。 本区间穿越海珠区南洲街三滘经济社、南洲二手车市场,穿越土层主要为<3-1> 冲洪积层—砂层、<3-2>冲洪积层—砂层、<4-1 >冲洪积层—粉质粘土、<4-2> 河湖相沉积层一淤泥质土、<5-1>可塑状残积层一粉质粘土、<5-2>硬塑状残积层—粉质粘土、<6
盾构隧道下穿高铁施工变形控制
盾构隧道下穿高铁施工变形控制 发表时间:2019-07-17T15:20:04.323Z 来源:《基层建设》2019年第13期作者:卢雨田[导读] 摘要:本文介绍了杭州至海宁城际铁路某区间盾构隧道下穿高铁桥梁工程的施工情况。 中铁第四勘察设计院集团有限公司湖北武汉 430000摘要:本文介绍了杭州至海宁城际铁路某区间盾构隧道下穿高铁桥梁工程的施工情况。由有限元建模分析和现场施工可得到结论:施工按照沉降控制和位移控制的要求,通过建立盾构试验段,设置隔离防护桩,掘进过程中结合现场监测数据,合理选择土压力、推进速度、同步注浆、二次补偿注浆等掘进参数,这一系列技术措施可有效保证地表沉降、桥墩位移处于可控范围,达到了预期的施工效果,为 后续工程和类似工程提供参考。 关键词:盾构隧道;有限元分析;隔离桩;穿越施工;现场监测 Abstract:This paper introduces the construction of shield tunnel under the high-speed railway bridge project of hangzhou-haining intercity railway. Conclusions can be drawn from finite element modeling analysis and on-site construction, according to the requirements of settlement control and displacement control, a series of technical measures such as the shield test section is established, and the isolation guard pile is set. Combined with the in-situ monitoring data during the excavation process, the soil pressure, propulsion speed, synchronous grouting and secondary compensation grouting are reasonably selected,which ensure the surface settlement, the displacement of the pier is in a controllable range, and the expected construction effect is achieved. Key words:shield tunnel; finite element analysis; isolation piles; crossing construction; in-situ monitoring 0引言 近年来随着城市轨道交通开发受到越来越广泛的关注[1-2],盾构近距离穿越高铁桩基的问题就显得更为突出。杭州、无锡、南京等地的地铁施工都面临盾构超近距离穿越高铁桩基的情况,而高速铁路需严格控制变形,导致了盾构隧道下穿高铁工程施工的困难性、复杂性。而现在关于盾构超近距离穿越高铁桩基的工程经验相对较少,对于采用何种保护措施、怎样控制施工过程及效果如何等问题尚还处于探索阶段[3]。 本文结合杭州至海宁城际铁路(以下简称“杭海城际”)某区间盾构下穿高铁桩基的一个典型工程现场试验研究,先后进行有限元建模分析[4-5],设置隔离防护桩,掘进过程中结合现场监测数据,合理选择盾构隧道掘进参数,最终完成该区段的施工,积累了处理该类型工程的经验,得出一些有意义的结论,可为高铁桩基周边盾构穿越施工行为的理论研究提供参考。 1工程概况 杭海城际是浙江省都市圈城际铁路网中的一条放射型线路,该铁路工程第四标段为海宁高铁站~长安镇站区间地下区间部分,其中穿越桐海特大桥段受影响桩基为575号、576号、577号共3根桥桩,运营里程DK129+461.518~DK129+526.918,区间隧道与桐海特大桥夹角约50°,下穿大桥段长约18m。每个桥墩由8根Φ1000钻孔桩支撑,桩长69~85m,左线盾构隧道距离桥桩最小距离为6.2m,右线盾构隧道距离桥桩最小距离为5.9m。杭海城际区间隧道与桐海特大桥相对位置关系如图1所示。 区段工程施工工法为盾构法,施工采用内径5500mm、外径6200mm、衬砌厚度350mm、环宽1200mm单圆盾构衬砌。衬砌环全环由六块组成,即一块小封顶块K、两块邻接块L和三块标准块B构成,环间采用错缝拼接方式,管片采用M30弯螺栓连接。盾构机选用德国海瑞克公司生产的S-997土压平衡盾构机,并配备同步注浆系统。 盾构区间全区间处在淤泥质黏土和粉质黏土的软土地层中,其中下穿高铁区段埋深约5.5m,属于浅埋盾构软弱地层高标准下穿既有高铁桥梁施工,施工难度大技术要求高。且根据上海铁路局要求,施工期间高铁限速至200km/h,桥墩变化值控制在1mm以内,为全线的重难点工程之一。 图1杭海城际区间隧道与沪杭甬客运专线桥梁平面关系图 Fig.1 Plane relationship diagram between Hangzhou-Haining inter-city tunnel and Shanghai-Hangzhou-Ningbo passenger line 本区段工程隧道主要穿越土层为④1层淤泥质黏土(土层厚1.2~14.0m,流塑)、⑤1层粉质黏土(土层厚2.2~7.0m,硬塑)和⑤2层粉质黏土夹粉土(土层厚约2.7~5.6m,可塑)。本区间工程地表水属上塘河水系,地下水类型主要可分为第四系松散土类孔隙潜水和孔隙微承压水。根据周边环境调查情况显示,盾构区间除高铁桥梁及高速桥梁外无其他建构筑物,周边以农耕地及荒地为主。 2施工变形控制 2.1隔离桩加固施工 盾构施工将不可避免的造成地层损失和引起周边土体的扰动,从而盾构上方土体及地面将产生一定的沉降,对邻近铁路桥梁将产生一定的影响。本区间隧道已进入铁路保护影响范围,为保证盾构能够安全顺利通过且不影响既有高铁桥梁正常运营,使地铁盾构施工对沪杭高铁桥梁的影响降到最低,拟采用在盾构下穿前在洞外设置隔离桩的防护措施,王国富等研究了采用合理形式的隔离桩对变形控制效果的可操作性、适用性[6-7]。
盾构隧道穿越既有建筑物施工应对技术
盾构隧道穿越既有建筑物施工应对技术 文章摘要: 盾构隧道穿越既有建筑物施工应对技术摘要:随着近几年地下工程建设的不断发展,盾构施工技术已越来越成熟,特别是在城市轨道交通建设中更显示出其优越性。但是,对于盾构施工过程中穿越障碍物或近距离通过既有建(构)筑物的施工还缺少相应的工程实例,经验相对也较少。近年来,我国城市轨道交通建设发展迅速,但是面临着越来越复杂的周边环境和施工条件,因此研究和制定相应的施工技术和应对措施十分必要。文章针对盾构施工穿越城市内河、下穿既有隧道以及湖底施工、下穿古城墙等工程实例进行分析研究,提出了针对类似情况的应对技术措施。 1 引言 随着国民经济的发展和城镇化建设的加速,国内城市轨道交通建设发展也越来越迅速。在轨道交通建设中,盾构工法由于其优越性在国内的应用越来越多。为了使轨道交通尽快形成网络达到预期的规模效应,轨道交通的建设也在加速。随着初期单条线的建成,后续线路建设的难度会越来越大。同时,伴随城市规划建设,特别是通常伴随地铁建设的沿线开发的增多,工程建设所面临的是越来越复杂的周边环境,穿越障碍物或近距离通过既有建(构)筑物的情况也越来越多。工程施工时既需要对既有建(构)筑物进行保护,又要确保工程本身的安全性和进展顺利,因此对不同的情况采用相应的应对技术十分必要。本文以南京地铁施工中已成功完成的盾构施工穿越障碍物的几个实例为基础,研究分析相应的应对技术。 2 下穿既有河流 2.1 工程实例 金川河宽10.4m,河堤深4m, 水深1.3m,为污水河。盾构隧道与 该河近正交下穿通过,盾构机与 河床底净间距6.2m。该段 地质情况自上而下分别是:② -1d3-4粉细砂(3.5m)、②-2c2-3 粉土(约6.0m)、②-2b4淤泥质粉 质粘土(约3m)、③-2-1b2粉质粘 土(4m)、③-3-1(a+b)1-2粉质粘 土(约 4.7m)。隧道主要在② -2c2-3粉土、②-2b4淤泥质粉质 粘土(上部)和③-2-1b2粉质粘土 (下部)地层中穿过(图1)。 该工程盾构机于2002年5月 9日~2002年5月10日和2002年 12月28日~2002年12月29日分 别在下行线和上行线顺利通过金 川河,沉降监测结果良好,没有采 用应急预案。但是在下行线掘进
VMT自动导向系统在盾构法施工中的应用
VMT自动导向系统在盾构法施工中的应用 摘要利用自动仿真技术,结合应用广泛的测量仪器,针对盾构法地铁施工,采用无线数据传输功能,方便、快捷地将盾构机掘进姿态以图形和文字的双重效果实时显示在计算机屏幕上,指导盾构机操作手调整盾构掘进参数,可真正实现操作可视化、同步化。 关键词控制测量联系测量导向系统盾构法地铁施工 1引言 盾构法施工工艺目前已经被绝大多数城市轨道交通工程予以采用。本文通过对国内城市轨道交通盾构法施工工艺的研究及成都地铁1、2 号线一期工程的实践,介绍地铁盾构施工中的控制测量、联系测量、盾构机自动导向系统,其中重点介绍海瑞克盾构机配置的VMT 导向系统的应用和研究。 2控制测量 2.1 平面控制测量 2.1.1 平面控制测量概述 地铁施工领域里平面控制网分两级布设,首级为GPS 控制网,二级为精密导线网。施工前建设单位提供一定数量的GPS 点和精密导线点,施工单位根据自身需要在标段范围内加密导线点,以满足在施工过程中测设工作的需要。 2.1.2 地面平面控制测量 在业主交接桩后,施工单位要对所交桩位进行复测,同时在所交桩的基础上加密精密导线点;特别是在始发井附近,一定要保证有足够数量的控制点。 控制测量采用导线边角测量方法进行,测量仪器应符合下列精度要求:角度≧2″,距离≧1.5 mm+2×10-6D/2.4s,人工测量应不低于4 个测回。 2.1.3 地下平面控制测量 洞内导线控制网是隧道掘进的基本框架,洞内施工控制导线一般采用双支导线的形式向前传递,然后将双支导线最前点连接起来,构成复合导线的形式。如果是在满足条件的成型隧道内,应尽量构成三角控制网的形式进行测设。测量精度要求同于地面测量。 洞内控制导线点一般采用在隧道最大跨度附近安装强制对中托架,这样测量起来非常方便,且可以提高对中精度,同时不影响洞内运输。 2.2 高程控制测量 2.2.1 高程控制测量概述 高程控制测量主要包括地面精密水准测量和高程传递测量及洞内精密水准测量,在一般情况下,城市地铁领域里的精密水准测量按城市二等水准测量标准施测。 2.2.2 地面高程控制测量 在业主交桩后,应及时对桩位进行复测,同时在标段范围内加密高程控制点,在始发井附近不得少于 1 个,根据情况也可以用导线点作为高程加密点。 2.2.3 地下高程控制测量 由于成型隧道一般都需要进行水平运输,底部铺设了钢轨,所以在布设洞内高程控制点时一定要确保点位不能突出最低轨面,否则很容易被电动机车破坏;但也不应过低,应避免被隧道底部淤泥掩埋,造成不必要的重测。 2.3 联系测量 2.3.1 联系测量概述
盾构下穿建筑物技术交底
布吉站~百鸽笼站区间 盾构下穿建筑物施工技术交底 一、工程概况 布?百区间隧道下穿越金鑫实业有限公司厂房、布吉永盛钟表厂、华年华美工业区集体宿舍等9栋建筑物。 区间过建筑物里程、对应环号及洞身地质情况详见下表 、掘进参数选择
、盾构施工下穿建筑注意事项 1、掘进过程中适当加大同步注浆压力及注浆量,每一环管片注浆量在6?8斥,1、4#注浆压力1.5?2.5Bar , 2、3#注浆压力2?3Bar,根据实际情况调整同步注浆浆液配合比,提高浆液的和易性和可泵性,缩短浆液凝固时间,及时有效地填满管片与围攻岩间的建筑空隙,防止地表下沉。注浆系统发生故障、注浆管发生堵塞时应停止掘进,待维修正常后方可继续掘进。盾构机停止掘进时严禁进行同步注浆,避免建筑物隆起。 2、在盾构掘进过程中要严格控制出土量,做到进尺与出土量保持均衡,并填写好 出土控制表,如发现一环出土量超过65m3或掘进过程中进尺与出土量保持不均衡,且初步估计是因刀盘位置土体塌方所致,应立即停止出土,继续往前掘进(此时总推力根据实际情况可调整至1000t,但各个控制按钮必须均匀增加)至顶部压力表显示为1.2bar 以上后停止掘进,并及时通知工程部及其它相关部门和领导,工程部立即派人到掌子 面里程对应的地表巡查,同时现场土木值班人员对渣样进行取样和分析,并取好渣样到地面供相关领导和部门分析。领导和相关部门结合渣样分析、设计院提供地质情况、地表建筑物沉降情况最后决定是否继续往前掘进,盾构操作手或机长不得擅自作主。 3、推进过程应保持盾构机有良好的姿态,严禁姿态的急剧起伏,水平和高程偏差 控制在土50mm以内。减小盾构机上下千斤顶压力差,上下千斤顶压力差控制在60Bar 以内。 4、根据地表监控量测数值,如发现管片在脱出盾尾后,地表沉降幅度较大(10mm v 沉降值v 20mm时对管片进行二次补注浆,以控制地表继续沉降,二次注浆采用双液浆。
盾构隧道下穿高铁既有线风险控制研究
盾构隧道下穿高铁既有线风险控制研究 发表时间:2019-01-16T15:02:18.230Z 来源:《基层建设》2018年第36期作者:叶余超 [导读] 摘要:随着城市化的不断发展,轨道交通的网络不断加密,也有着越来越多工程建设穿越既有隧道现象。 广东华隧建设集团股份有限公司 摘要:随着城市化的不断发展,轨道交通的网络不断加密,也有着越来越多工程建设穿越既有隧道现象。像是很多新建工程会影响到地铁线路,例如民用或者是工业建筑的基坑工程手工,基础设施中排水管道、热力管道、输水管道、供电电缆等在地下穿越,其中的交通中的公路、桥梁以及地铁隧道等公共交通设施的穿越。因此说明既有线隧道会受到盾构隧道施工的严重影响,和常规地铁隧道施工相比较更为复杂。近年来在城市交通不断发展的情况下,一些工程出现其穿越既有轨道线的现象,出现的问题会直接关系到既有轨道结构以及其安全问题,严重影响着既有线运行的稳定性和安全性,制约着建设和发展城市轨道交通,亟待解决。本文主要针对盾构隧道穿越既有线产生的沉降问题进行研究,首先分析其带来的风险,并对既有线沉降问题进行计算,首先建立计算模型,后进行具体计算,最后针对沉降问题提出相应的控制方法。 关键词:盾构隧道;下穿既有线;风险控制 引言:近些年来,我国不断地发展着社会经济,进而促进城市化进程的加快,我国的城市轨道交通是全球发展最迅速地国家之一。随着技术手段的发展,盾构隧道的特点是机械化有着很高的程度、掘进有着很快的速度、周边的环境很少会对其产生影响等,在修建城市轨道交通地下隧道中应用的范围比较广泛。现阶段,我国轨道交通方面发展的比较迅速,交通网络在不断进行优化,不断地扩大开发城市地下空间的规模,并加强利用效果。在这样的情况下,很难防止新建的盾构隧道穿越既有轨道线等复杂工程状况,并使得新建隧道与原有隧道间的距离在不断减小。这种隧道穿越工程不仅距离近,而且叠交复杂,隧道在这样的情况下穿越有着较大工程施工风险,可能会影响地铁结构沉降等风险,严重的影响着隧道的安全运营。本文主要有盾构隧道下穿而引起风险中的既有线沉降问题进行分析,并提出相应的控制方案。 1 隧道风险研究 盾构隧道施工不能避免和邻近既有线产生附加内力或者是结构变形,进而会对既有线列车的安全、可靠运行造成影响。在这样的状况下,结合保护既有线的要求,采取相应的措施将变形的情况减少,这其中要重视的就是对既有线运行安全性与稳定性的保障。还有,既有线的重要程度特别高,同时严格的要求着附加变形,从而使穿越工程难度非常大,风险也特别高。开挖隧道时,一般情况下上方沉降相较于下方围岩上有很大程度的浮隆现象,加之上方围岩有着复杂的受力,大量分布的剪切和压剪区域,对围岩的稳定性有着严重影响,下方围岩分布在卸载回弹区,围岩稳定性可以得到保障(如图一所示)。所以说明,在同样的近距离下,盾构隧道下穿既有线存在着很大的风险。 图一 其中:第1分区内关键开挖作用是压缩剪切,同时是剪切破坏重要区域;第2分区关键开挖作用是剪切;第3分区内主要开挖作用是卸载;第4分区是开挖隧道形成地表沉降的区域。 2 盾构隧道下穿既有线结构沉降的计算 2.1计算的模型 结合地铁车站实际运营中各种情况,进行深入的研究,选定一定范围的土体作为计算模型分析对象,利用有限元的计算软件进行分析,对盾构隧道下穿既有线所造成的地表沉降实施模拟。模型建立的过程中关键要对以下5个方面进行考虑:(1)物理模型的平面应变是其问题特征;(2)使用的计算方法是弹塑性分析;(3)假设隧道开挖不影响计算边界处,也就是指这一处是原始静止应力的状态,变形是零,选用约束进行模拟;(4)宽度计算采取隧道直径的5倍;计算隧道深度为地下隧道直径的3倍;(5)对时间效应以及开挖过程中产生的应力率做出充分考虑。 2.2计算结果 图二为右线盾构掘进时地面沉降曲线图,图三为左线盾构掘进时地面沉降曲线图,从这两幅图中可以看出:盾构隧道下穿时会有沉降差,沉降差值若是超出限度,则会导致车站发生沉降、弯曲结构以及扭曲变形等现象,原有的裂缝不仅会错动,畏怯还会拓展,这样的情况会引起轨道几何形位出现改变:比如说钢轨顶面高差产生相应的变化,水平面上轨道中心平顺性的变化,沿线路方向轨道竖向平顺性的变化等。这些变化不只会使既有线隧道结构增加内力,也极有可能是钢轨顶面水平超差,前后高低超差或者是轨向平顺超差。除此之外,对既有线道床与基层的整体刚度不相同进行考虑,由于变形过大,道床和基层间可能出现脱离的现象,对既有线运营的安全性有着威胁。
盾构导向系统横向比较
盾构导向系统横向比较 1、比较的导向系统 SLS-T 盾构导向系统(简称SLS-T ) MTG-T 盾构导向系统(简称MTG-T ) ROBOTEC 盾构导向系统(简称ROBOTEC ) ZED GLOBAL 盾构导向系统(简称ZED GLOBAL ) PPS 盾构导向系统(简称PPS ) RMS-D 盾构导向系统(简称RMS-D ) 2、关键技术 1.1系统原理 1.1.1 激光靶系统 图1激光靶偏航角测量示意图 如图1所示,激光靶的关键技术是精确感应激光束与激光靶轴线间的偏航角度,激光靶集成有精密角度传感器,能精确测定激光靶的转动角及俯仰角。 1.1.2 棱镜系统 图2棱镜技术原 如图2所示,棱镜技术是通过测量安装在盾构机上的两个棱镜及盾构机的转动角,通过数学 激光束 激光靶 偏航角 激光靶轴线
的方法计算盾构的位置姿态。 1.1.3 两种原理的差别 安装 1)、激光靶安装 图3 激光靶安装 激光靶系统在盾构机上仅需安装一个激光靶设备,易于安装、保护和维护。 2)、棱镜安装 图4 棱镜安装 除安装两个开关棱镜外,还需要安装一个角度传感器,共在盾构机上安装三个设备,每个设备需要供电及通讯。 通视状况 1)、激光靶系统
图5 激光靶通视状况 激光靶系统具有较好的通视距离,可很好的应用于狭窄测量通道的盾构机及小型盾构机。2)、棱镜系统 图6 棱镜系统通视状况 棱镜系统易发生棱镜被遮挡的情况,在狭窄测量通道的盾构机上应用受限,不能应用于小型盾构机。 测量精度及稳定性 1)、激光靶系统 方位角:0.25~0.5mm/m; 俯仰角:0.18~0.5mm/m; 转动角:0.18~0.5mm/m; 位置:1mm 测量结果稳定性:稳定。 2)、棱镜系统 方位角:与棱镜之间的距离有关; 俯仰角:0.18~0.5mm/m; 转动角:0.18~0.5mm/m; 测量结果稳定性:与棱镜安装位置有关。
标识导向系统中的一二三级标识各是什么
标识导向系统中的一二三级标识各是什么在标识导向系统理论中,会将同一标识导向系统中的各种不同的标识标牌划分为几个不同的级别,即:一级标识,二级标识,三级标识。或者也称之为一级节点标识,二级节点标识,三级节点标识。这样进行分级的目的是为了避免在同一环境中的单品标识信息过于庞杂,导致标识观察者或者使用者出现信息混乱而无法准确认知标识信息。那么具体来说,这三级标识各承担着什么功能,具体指的是什么,下面我们就进行简单介绍。 旅游景区一级标识 我们就以旅游景区导视系统来说,所谓的一级导向标识,是指景区周边道路上的景区指示牌。从这些标识的版面信心来看,一级标识往往是导视系统中用于传递环境整体信息以及景区所处位置的标识
牌。有些标识导向系统理论中,也会将景区平面布局图纳入到一级标识之中,其理由是景区平面布局图为整个景区标识导向系统的根目录,其它级别的导视标识均以此为原点来展开。 一级导向标识的特点是标识信息量大,信息内容重要,从标识本身而言,其体量较大,内容醒目,可视距离远,能为较大环境范围内的人群提供信息展示服务。 旅游景区二级标识 二级导向标识是指承接一级标识,继续为人们提供更加详细和具体信息的标识。注意,二级标识一定是承接一级标识信息内容的。在旅游景区内,游客可以通过一级标识指示顺利到达景区环境之中。在到达景区目的地后,二级导视标识将为游客提供更加全面和详细的环
境信息,游客可以根据二级导视标识所提供的信息,规划自己在景区内的旅游线路,熟悉景区内景观位置,在旅游景区道路交叉处的多功能导视牌,区域平面布局图都可以纳入到景区二级标识导向之中。 二级导向标识的特点是其承担着整个旅游景区主要的导视服务功能。指示导视功能强大。在整个导视系统中,二级导视标识也起着承上启下的作用。整个标识导向系统功能是否完善、健全,二级导向标识起着关键作用。 旅游景区三级标识 三级导向标识是整个标识导向系统中的末段。其具体单品种类比较庞杂,数量也较多。譬如景区内的景观介绍牌、花草牌、提示牌都
地铁盾构隧道下穿建筑物沉降规律分析
地铁盾构隧道下穿建筑物沉降规律分析 摘要:通过对成都地铁盾构隧道穿越建筑物引起的地表沉降进行动态监测与分析,得出了盾构地铁隧道在穿越建筑物时沉降发生时间及影响范围,并初步制定了用于指导施工的监测数据库,以便为今后类似工程提供参考。 关键词:成都地铁2 号线; 盾构隧道; 穿越; 地面建筑物; 沉降监测 1 .引言 随着国家、城市的经济发展,地铁成为交通繁忙、人口密集城市的重要交通工具。在地铁盾构隧道施工期间,不可避免地要近距离地下穿地面建筑物,在穿越期间,由于地层受扰动、超挖引起的地层损失及应力改变等原因都可能造成地面建筑物出现沉降、位移,从而引起建筑物出现裂缝、倾斜甚至倒塌,给人民的财产、安全带来威胁。为掌握盾构施工过程中地面建筑物的状态,在实施加固、保护等施工措施的同时,必须对地面建筑物进行监测,并将监测数据及时反馈到施工中,确保施工安全。本文对成都地铁盾构隧道某栋建筑物的监测成果进行研究分析,以便为今后类似工程提供参考。 2 .工程及地质概况 本工程为成都地铁线2 号线羊西二环路站~白果林站,在里程YCK26 + 332 ~YCK26 + 832 段穿越密集居民建筑群。盾构隧道埋深约14 米,地面建筑物为金琴路南段二巷2 号楼,主体上部为砖混7 层,下部为预制桩基础,基底约2.5m 中砂。 该隧道地处川西平原岷江I 级阶地,为侵蚀~堆积阶地地貌,地形平坦。隧道穿越地层主要为砂卵石层,局部夹中砂。第四系孔隙水是段内地下水的主要存在形式,主要赋存于各个时期沉积的卵石土及砂层中,土体透水性强、渗透系数大,水量丰富。场地内地质构造条件简单,未发现有断裂通过,无不良地质作用,在VII度地震作用下,不具备产生滑坡、崩塌、陷落等地震地质灾害的条件,环境工程地质条件较简单。综合判定,本工程场地稳定。 3 .监测方案设计 尽管盾构法施工隧道具有对周围环境影响小、掘进速度快、机械化程度高、施工安全等特点,但仍不可避免地引起地表以及地表建筑物沉降。因此在研究盾构隧道对建筑物沉降的影响,布设了建筑物沉降监测点,用以观测建筑物下沉量,判定建筑物的安全性,以便采取相应的保护措施。 3 .1 测点布置 建筑物沉降监测点位布设在建( 构) 筑物四角的结构柱、建筑物基础分界点( 基础沉降缝) 布设沉降观测点10 个监测点位,见图1。
地铁盾构下穿对近接高架桥桩基的影响
地铁盾构下穿对近接高架桥桩基的影响 摘要:运用MIDAS/GTS 三维有限元分析软件,模拟了盾构隧道动态施工对近接高架桥桩基的影响,重点分析了桩基水平位移及沉降的发展规律,为盾构安全通过提供依据。研究表明: 两侧桩基水平位移在隧道范围内呈现明显“凹槽”; 盾构推力是影响桩基水平位移的重要因素,对沿隧道方向水平位移的影响较沿垂直隧道方向大,对桩基沉降影响较小; 工程拟定袖阀管注浆加固措施将引起桩基产生附加沉降,对桩基水平位移控制无明显效果。分析结果认为,在不采取袖阀管注浆加固措施情况下,合理选取盾构推力,可完成盾构隧道对近接高架桥桩基的安全穿越。 关键词: 盾构下穿高架桥桩基三维数值模拟盾构推力水平位移沉降袖阀管注浆 随着城市轨道交通建设的快速发展,城市地铁盾构隧道将不可避免地穿越周边已建的建( 构) 筑物。特殊情况下,盾构隧道需穿越已有高架桥的桩基础。盾构施工将产生地层土体损失,从而导致隧道附近土体应力场发生重分布,近接桩基周边法向应力将有不同程度的释放,使得桩基的承载能力折减。同时,隧道施工引起隧道周围地层移动,其产生的自由土体位移场使得工作状态的桩基产生附加弯矩和变形[1-5],对桩基础的安全使用产生风险。地铁盾构隧道下穿对近接高架桥桩基的影响分析成为当前城市地下空间开发中的热点问题。 1 工程地质条件及近接桩基概况 1. 1 地质条件 本工程区段属于丘陵地貌,沿线为剥蚀残丘和丘间冲沟相间,因道路等工程建设,原地貌大多经过挖填。地下水以第四系孔隙水、基岩裂隙水赋存。该区段内冲积~洪积砂层不会产生地震液化,不良地质有:软土地层、砂层、花岗岩残积土及“球状风化孤石”。本工程范围区间隧道主要从冲积—洪积粉质黏土层( 4N-2) ,( 4N-3) ,残积土层( 5H-2) 中穿过。 该区段地层自上而下依次为素填土、冲积—洪积而成的可塑状粉质黏土、冲积—洪积而成的稍密中粗砂、硬塑状花岗岩残积土、全风化花岗岩、强风化花岗岩。 1. 2 近接高架桥桩基概况 广州地铁六号线萝岗~香雪区间下穿北二环高速公路高架桥桩基工程位于广州市萝岗区广深高速公路与北二环高速公路交汇处,位于地铁六号线右线设计里程YDK40 + 510. 544,左线设计里程ZDK40 +523. 849 附近。本区段拟采用盾构法施工,隧道埋深约15 m,所穿越的北二环高速公路立交桥,桥名为“萝岗分离式立交桥”,地铁盾构隧道距离两侧高架桥桩基的距离仅有2. 0 ~12. 5 m,上部构造采用预应力混凝土连续箱梁,下部构造为柱式墩,Ф1 800 mm钻孔灌注桩基础,为摩擦型桩,桩底均落入全风化花岗岩,桩基与隧道位置关系平面图见图1,高架桥桩基与盾构隧道剖面关系图见图2,桩基与隧道位置关系见表1。
盾构隧道管片质量检测技术准则CJJ/T
盾构隧道管片质量检测技术标准(C J J/T164-2011) 说明: 目前网上尚无“盾构隧道管片质量检测技术标准(CJJ/T164-2011)”的word版文档;为了让大家更好的学习和交流这份规范,网友ershibasui1474编写了这份规范的电子版,请大家尊重该规范的版权和权威性,不得侵犯该规范编写单位及编写人的知识产权。 该规范是在很匆忙的时间内完成的,并未进行复核,请大家在阅读时注意其中可能存在的错误并予以更正。 1总则 1.0.1为加强盾构法隧道工程施工管理,统一盾构隧道管片质量检测和验收,保证检测准确可靠,制定本标准。 1.0.2本标准适用于采用盾构法施工的盾构隧道混凝土管片和钢管片进场拼装施工前的检测和质量验收。 1.0.3盾构隧道管片质量检测和验收除应执行本标准外,尚应符合国家现行有关标准的规定。 2术语 2.0.1管片 盾构隧道衬砌环的基本单元,包括混凝土管片和钢管片。 2.0.2混凝土管片 以混凝土为主要原材料,按混凝土预制构件设计制作的管片。 2.0.3钢管片 以钢材为主要原材料,按钢构件设计制作的管片。 2.0.4水平拼装检验 将两环或三环管片沿铅直方向叠加拼装,通过测量管片内径、外径、环与环、块与块之间的拼接缝隙,从而评价管片的尺寸精度和形位偏差。 2.0.5渗漏检验 对混凝土管片外弧面逐级施加水压,观察水在混凝土管片内弧面及拼接面的渗透情况,评价管片抵抗水渗漏的能力。 2.0.6抗弯性能检验 对混凝土管片施加抗弯设计荷载,分析混凝土管片在抗弯荷载作用下的变形、管片表面裂缝的产生和变化,评价管片的抗弯性能。 2.0.7抗拔性能检验
对混凝士管片中心吊装孔的预埋受力构件进行拉拔试验,评价管片吊装孔的抗拔性能。 2.0.8粘皮 混凝土表面的水泥砂浆层被模具粘去后留下的粗糙表面。 2.0.9飞边 模塑过程中溢人模具合模线或脱模销等间隙处并留在混凝土管片上的水泥砂浆。 拼接面 采用某种方式将盾构隧道管片连接起来,管片与管片之间的接触面。 环向 盾构隧道管片拼装成环后,环的切线方向。 纵向 盾构隧道管片拼装后,环与环的中心连线方向。 渗漏检验装置 在渗漏检验中,用于固定由凝土管片试件,并能在管片外弧面与试验架钢板之间形成密闭区间进行充水加压试验的试验台座。渗漏检验装置由检验架钢板、刚性支座、横压件、紧固螺杆、橡胶密封垫等组成。 3基本规定 3.0.1盾构隧道管片检测,应在接受委托后,进行现场和有关资料调查,制定检测方案并确认仪器设备状况后进行现场检测,根据计算分析和结果评价判断是否进行扩大抽检,并应出具检测报告(见图3.0.1)。 图3.0.1盾构隧道管片检测工作程序 初检结果不
盾构机的种类
盾构机的种类 盾构的分类较多,可按盾构切削面的形状、盾构自身构造的特征、尺寸的大小、功能,挖掘土体的方式,掘削面的挡土形式,稳定掘削面的加压方式,施工方法,适用土质的状况多种方式分类。下面我们按照盾构组合命名分类阐述。 一、全敞开式盾构机(全敞开式盾构机的特点是掘削面敞露,故挖掘状态时干态状,所以出土效率高。适用于掘削面稳定的性好的地层,对于自稳定性差的冲积地层应辅以压气、降水、注浆加固等措施) 1.手掘式盾构机 手工掘削盾构机的前面是敞开的,所以盾构的顶部装有防止掘削面顶端坍塌的活动前檐和使其伸缩的千斤顶。掘削面上每隔2-3m设有一道工作平台,即分割间隔为2-3m。另外,在支撑环柱上安装有正面支撑千斤顶。掘削面从上往下,掘削时按顺序调换正面支撑千斤顶,掘削下来的沙土从下部通过皮带传输机输给出土台车。掘削工具多为鹤嘴锄、风镐、铁锹等。 2.半机械式盾构机 半机械式盾构机是在人工式盾构机的基础上安装掘土机械和出土装置,以代替人工作业。掘土装置有铲斗、掘削头及两者兼备三种形式。具体装备形式为A.铲斗、掘削头等装置设在掘削面的下部。B.铲斗装在掘削面的上半部,掘削头在下半部。C.掘削头装在掘削面的中心。D.铲斗装在掘削面的中心。 3.机械式盾构机 盾构机的前部装有旋转刀盘,故掘削能力大增。掘削下来的砂土由装在掘削刀盘上的旋转铲斗,经过斜槽送到输送机。由于掘削和排土连续进行,故工期缩短,作业人员减少。 二、部分开放式盾构机(即挤压式盾构机,其构造简单、造价低。挤压盾构适用于流塑性高、无自立性的软粘土层和粉砂层) 1.半挤压式盾构机(局部挤压式盾构机) 在盾构的前端用胸板封闭以挡住土体,使不致发生地层坍塌和水土涌入盾构内部的危险。盾构向前推进时,胸板挤压土层,土体从胸板上的局部开口处挤入盾构内,因此可不必开挖,使掘进效率提高,劳动条件改善。这种盾构称为半挤压式盾构,或局部挤压式盾构。 2.全挤压式盾构机 在特殊条件下,可将胸板全部封闭而不开口放土,构成全挤压式盾构。 3.网格式盾构机 在挤压式盾构的基础上加以改进,可形成一种胸板为网格的网格式盾构, 其构造是在盾构切口环的前端设置网格梁,与隔板组成许多小格子的胸板;借土的凝聚力,用网格胸板对开挖面土体起支撑作用。当盾构推进时,土体克服网格阻力从网格内挤入,把土体切成许多条状土块,在网格的后面设有提土转盘,将土块提升到盾构中心的刮板运输机上并运出盾构,然后装箱外运。 三、封闭式盾构机 1.泥水式盾构机 是通过加压泥水或泥浆(通常为膨润土悬浮液)来稳定开挖面,其刀盘后面有一个密封隔板,与开挖面之间形成泥水室,里面充满了泥浆,开挖土料与泥浆混合由泥浆泵输送到洞外分离厂,经分离后泥浆重复使用。 2.土压式盾构机 是把土料(必要时添加泡沫等对土壤进行改良)作为稳定开挖面的介质,刀盘后隔板与开挖面之间形成泥土室,刀盘旋转开挖使泥土料增加,再由螺旋输料器旋转将土料运出,泥土室内土压可由刀盘旋转开挖速度和螺旋输出料器出土量(旋转速度)进行调节。它又可细分为削土加压盾构、加水土压盾构、加泥土压盾构和复合土压盾构。
地铁盾构隧道下穿建筑物的安全性分析
地铁盾构隧道下穿建筑物的安全性分析 李茂文,胡辉 (南昌城市规划设计研究总院,江西南昌330038) 摘要:本文以深圳地铁5号线翻身 灵芝盾构区间隧道下穿碧海花园小区建筑物施工为工程依托,运用有限差分程序FLAC3D模拟盾构隧道开挖的全过程,对施工产生的管片内力变化、地表沉降以及桩基的变形进行了预测分析。计算结果表明,只要能够正确合理的施工,采用土压平衡盾构施工,安全顺利地穿越建筑物是可行的。 关键词:盾构隧道下穿建筑物地表沉降桩基沉降数值模拟 有限差分法由于具有能够适应复杂边界、非均质、非线性本构模型,分析结果全面详细等优点,被广泛用来模拟盾构隧道施工对环境的影响的分析。本文以深圳地铁5号线翻身 灵芝盾构区间隧道下穿碧海花园小区施工掘进为工程依托,运用有限差分程序FLAC3D模拟盾构隧道开挖过程,对施工产生的管片内力变化、地表沉降以及桥梁桩基变形进行预测分析。1工程概况 深圳地铁5号线翻身至灵芝盾构区间隧道管片设计外径为6m,内径为5.4m,管片厚度为30cm。地铁右线隧道穿越碧海花园2层和8层的砼框架楼房。碧海花园桩基采用柱下独立基础,承台下桩基采用Φ480沉管灌注桩,有效桩长17m。该建筑物桩基与隧道拱顶最近距离为1.14m,断面埋深20.5m,地下水位埋深为3.2m,隧道位于砾质粘性土、全风化花岗岩及强风化花岗岩三种不同硬度的地层中,局部有硬岩突起,突起硬岩裂隙发育,地质条件复杂。 2盾构掘进数值模拟分析 2.1材料特性 (1)土体材料 目前,在土工计算中广泛采用的各向同性模型有两大类,一类是弹性非线性模型,另一类是弹塑性模型,两者都反映了土的非线性应力—应变关系特性。本文土体采用弹塑性本构关系,屈服准则为直线性Mohr-Coulomb准则。 (2)注浆材料和管片衬砌材料 注浆材料和衬砌单元在模拟过程中也采用适合混凝土材料的弹塑性模型。注浆材料的强度会随着时间的推移而增加,此时取其长期固化注浆材料,其弹性模量取400Mpa[4],管片衬砌采用C50钢筋混凝土,弹性模量为35GPa。 2.2实体模型建立 计算采用有限差分程序FLAC3D建立三维模型,横向取40m,向上取至地表,向下取隧道中心以下15m,沿隧道长度方向取40m。左、右、前、后边界施加水平方向约束,底面限制垂直位移,顶面为自由面。初始应力只考虑自重应力场的影响。地层、管片、注浆浆液均视为理想弹塑性材料,服从Mohr—Coulomb屈服准则;管片和同步注浆浆液均采用壳单元;地层和桩基则采用实体单元模拟。计算模型如图2,模型共有148192个单元,154755个节点。盾构机长7.5m,盾构外径6.25m,管片宽l.5m,厚300mm,盾尾间隙厚75mm。盾构隧道与桥梁桩基的位置关系如图2所示 。 图1 三维计算模型图 图2盾构隧道与建筑桩基的位置关系图 根据地质勘察资料,该段地质分层从上而下分别为:3m的素填土、6m的砾砂、10.5m的砾质粘性土、2.5m的全风化花岗岩及16m的强风化花岗岩。各土层的物理力学参数见表1。3数值模拟计算结果分析 3.1应力分布分析 盾构推进15m、30m和40m时最大主应力云图如图3、4和5所示。从图中可以看出,随着盾构的不断推进,已开挖的隧道衬砌的最大主应力增大,当隧道开挖到40m时,拱腰靠底部位置的最大值主应力值达到2.3MPa,最小值出现在隧道拱顶的位置,最小主应力在拱顶的位置,其值达到-6.7MPa,均远远小于盾构管片的设计强度,因此,盾构管片所受到的内力不足以使管片结果产生破坏,管片结构仍有较大的安全富余量。 · 402 · 2012年第6期(总第123期)江西建材交通工程
盾构隧道近距离下穿武广高铁桥梁变形监测分析
盾构隧道近距离下穿武广高铁桥梁变形监测分析 阐述了全自动桥梁变形监测原理方法,并通过全自动桥梁变形监测系统,实时监测盾构下穿高铁过程中高铁桥墩及梁体的变形。监测数据表明,盾构下穿期间桥墩及梁体变形未达到报警值,全自动监测系统为区间盾构顺利下穿高铁桥梁及时提供了变形信息反馈,确保了高铁安全正常运营。 标签:轨道交通;盾构隧道;下穿高铁;桥梁变形监测 1 工程概况 武汉市轨道交通某区间盾构下穿武广高铁高架桥下行线和上行线。盾构左线从6#、7# 桥墩之间穿越,盾构右线从7#、8# 桥墩之间穿越,6#、7#、8# 桥墩桥跨间距均为32.6 m 简支梁。下穿处武广高铁线间距 5 m,设计速度350 km/h。6#、7#、8# 桥墩桩基桩长分别为18 m、18.5 m 和19 m,桩顶距地面约2.5 m,隧道底部距桩底分别为1.504 m、0.975 m 和0.473 m。区间隧道顶部覆土约15.06 m,与桥桩结构水平最小净距为8.12 m(图1)。 下穿处土层由杂填土、一般黏性土、老黏性土组成,基岩埋藏较浅。区间沿线为三级阶地剥蚀堆积垅岗区,下穿武广高铁盾构隧道洞身位于20a-2 中风化泥岩,地面至隧道顶地层主要为杂填土、10-2 粉质黏土、20a-1 强风化泥岩。 2 盾构施工 盾构机采用 2 台土压复合式平衡盾构机,盾构机外径 6.44 m。盾构隧道采用通用型管片错缝拼装,用M30彎螺栓连接,管片环宽 1.5 m,外径 6.2 m,内径5.5 m,厚度0.35 m,楔形量40 mm。左线盾构从2016 年11 月9日开始进入武广高铁核心保护区20 m 范围,2016 年11月13 日盾尾脱出高铁核心保护区20 m 影响范围;右线盾构从2016 年11 月15 日开始进入武广高铁核心保护区20 m 范围,2016 年11 月19 日盾尾脱出高铁核心保护区20 m 影响范围。左、右线盾构施工期间以12 环/天左右的速度向前推进。 3 桥梁变形监测 本工程采用全自动监测系统对武广高铁桥梁的变形进行实时监测,自动变形监测系统由测量机器人、监测站、控制计算机房、基准点和变形点等 5 部分组成(图2)。远程计算机通过因特网控制远程GPRS 模块或通过数据连接线远程监视和控制监测系统的运行,系统在无需操作人员干预的条件下实现自动观测、记录、处理、存储、变形量报表编制和变形趋势显示等功能。 3.1 监测原理方法 监测仪器为测量机器人,又称自动全站仪,是一种集自动目标识别、自动照
PPS盾构机导向系统简介
PPS盾构机导向系统简介 (1)导向系统是为了最大限度地把控制点位置信息提供给盾构机掘进系统,指导盾构司机进行操作。导向系统自动确定准确的三维空间位置和盾构机的开挖方向,并向司机提供盾构机离设计中心线的偏差。投影路径显示器(选用件)将偏离的盾构机调回设计中心线的最佳路线提供给司机。 (2)盾构机的位置和开挖方向的控制,是通过控制盾构机的至少两个控制位置及倾斜和转动角度来完成的,其控制点为安装在盾构机前部的两块棱镜,其相对于盾构机轴心线和局部坐标系的精确位置在组装盾构机时一次确定下来。 (3)盾构机转动和倾斜的角度是通过安装在盾构机内部的双轴倾斜仪精确测量得出,并进行控制和随时调整。 盾构机导向系统布置图见图12-4《PPS系统布置图》。 盾构机掘进控制机理为:在安装过程中通过人工测定预先确定好坐标的参考点(9)来定向经纬仪(1),并将测量基准资料输入系统电脑(2),再通过固定好位置和方向的机动经纬仪(1)自动测量盾构机里面的两块棱镜,通过标准勘测方法(系统附加功能)确定出经纬仪新的位置,进而得出盾构机姿态。 图12-4 PPS系统布置图 1:机动经纬仪、2:计算机、3:为间隙测量(选用)、4:推进油缸数据传输(选用) 5:倾斜与转动双轴倾斜计、6:安装在盾构机上的棱镜、7:系列数据传输(选用) 8:办公室电脑(选用)、9:远程棱镜、10:无线电子连接
(4)通过已定向的经纬仪测量斜距及水平和垂直角度得出盾构机两块棱镜的地球坐标。由于盾构机局部坐标系中两棱镜的位置在组装盾构机时已确定,而且盾构机转动和倾斜的角度可随时调出,进而盾构机上任意点(如:刀盘中心)在三维空间中的位置都可以计算出来。地球坐标系中的设计中心线是已知的并预先输入系统电脑,因此,盾构机相对中心线水平和垂直方向的偏差以及盾构机方位经过计算模拟以图形方式显示于液晶屏上。根据需要,可计算出投影路径并且将偏离的盾构机调回设计中心线的最佳路线显示出来,计算时需考虑一些参数如最小转弯半径或与预制衬砌管片几何图形有关的参数的影响。 (5)经纬仪上的远程棱镜进行定向经纬仪,能够测出自动联机检测经纬仪固定点移动造成的潜在误差。因为经纬仪通常安装在盾构机后面约25至300m 处刚开挖的可能不稳定的隧道壁上,所以经纬仪移动的可能性很高,盾构机导向系统通过定期测量远程棱镜检查经纬仪固定点的稳定性情况,一旦发生移动随即警示司机。其误差监测频率可根据需要进行调整。