在ABAQUS中进行的微观组织结构的有限元网格划分

在ABAQUS中进行的微观组织结构的有限元网格划分
异质体材料的微观组织结构对于材料的宏观物理和力学性能有着直接的影响。随着有限元方法和计算技术的发展,人们可以利用有限元的方法来模拟微观组织结构,以达到材料微观组织结构的‘性能导向型’设计与预测的目的。在用有限元进行微观组织结构模拟的过程中,网格划分是至关重要的。在国外,进行微观组织结构的有限元网格划分选用的是专门的有限元网格划分软件,而国内没有类似的软件。另外,在对各种不同的异质体材料微观组织结构进行有限元网格划分方面,没有发现专门的文献,更谈不上网格划分技术的系统化。有鉴于此,在微观组织结构可视化的基础上,选择大型通用有限元软件ABAQUS和自己开发的软件 TransMesh系统的进行了异质体材料微观组织结构的有限元网格划分,为今后的异质体材料微观组织结构的有限元模拟与分析提供了有效的手段。
1. 问题的提出
任何一个问题的有限元分析,通常由三个步骤组成:前处理,模拟计算和后处理[1]。与众多的有限元分析软件相比,ABAQUS具有超强的模拟计算和通用的分析能力,同时在前处理功能上也暴露出了明显的不足。这种不足在对复杂微观组织结构建模的过程中表现地尤为突出。对于大多数宏观物体而言,无论直接通过 ABAQUS/CAE所提供的绘图功能,或者是通过ABAQUS本身与绘图功能强大的CAD软件的接口,都可以用手工作图的方式建立相应的模型。然而,材料的微观组织结构是极其复杂的,其组成物分布也是大量分散,极不规则的。于是,如何简单高效地将复杂微观组织的拓扑结构在ABAQUS中真实而准确地再现,进而利用ABAQUS强大的分析能力进行有限元计算,成为亟待解决的问题。
2. 问题的描述
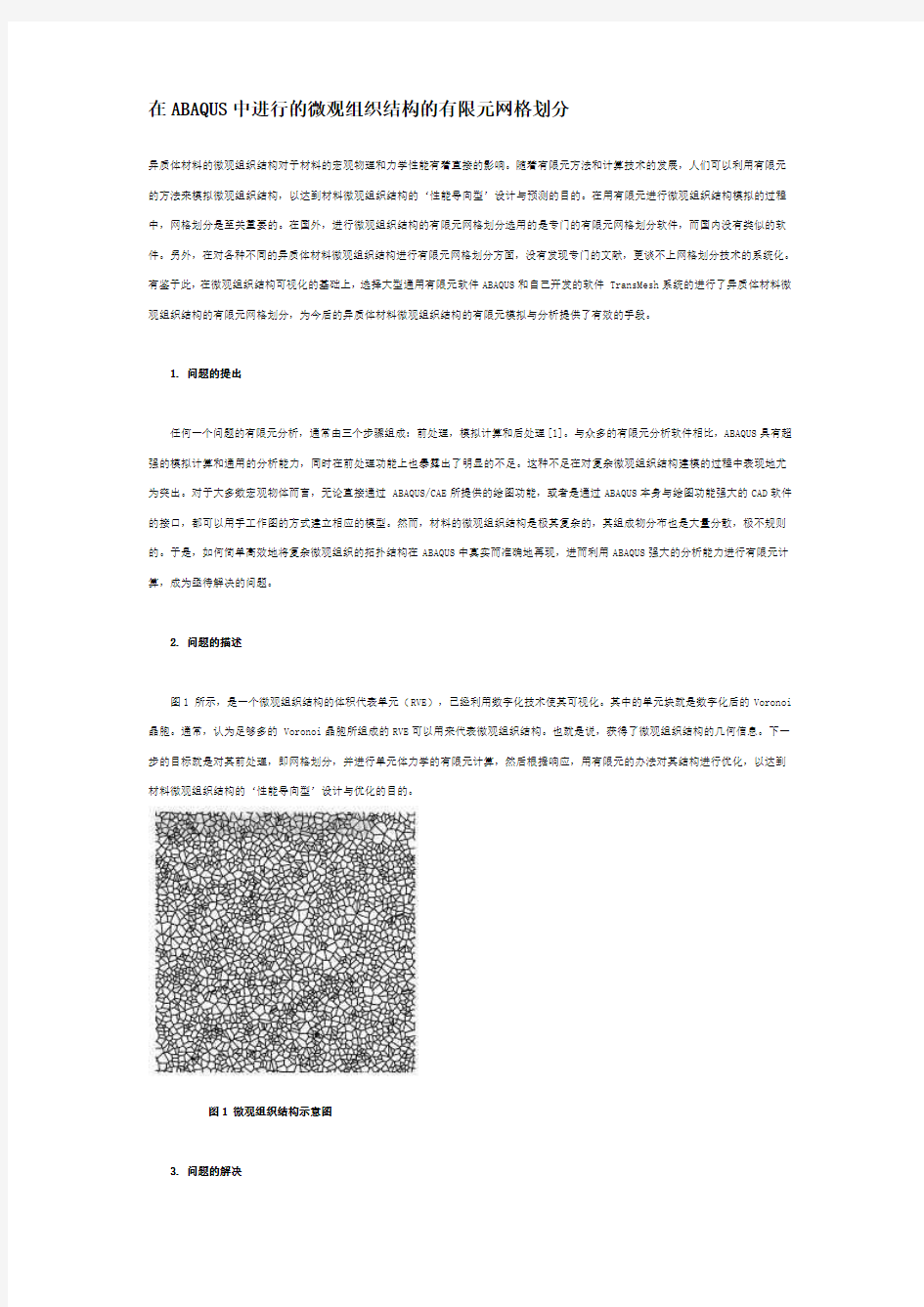
图1 所示,是一个微观组织结构的体积代表单元(RVE),已经利用数字化技术使其可视化。其中的单元块就是数字化后的Voronoi 晶胞。通常,认为足够多的 Voronoi晶胞所组成的RVE可以用来代表微观组织结构。也就是说,获得了微观组织结构的几何信息。下一步的目标就是对其前处理,即网格划分,并进行单元体力学的有限元计算,然后根据响应,用有限元的办法对其结构进行优化,以达到材料微观组织结构的‘性能导向型’设计与优化的目的。
图1 微观组织结构示意图
3. 问题的解决
在用ABAQUS对其建模的过程当中,拟订了几套方案:首先,试图利用图像格式转换器将上述数字化图像直接通过格式变换,从而转换为ABAQUS所支持的图形文件格式。然而,转换后的图像在ABAQUS中严重失真。位于RVE单元块中的晶粒与晶粒之间变得不再连续。显然,无法对此图像进行进一步的有限元网格划分。
其次,考虑到RVE图像尽管结构复杂,却都是由最基本的线段组成。于是,试图通过在ABAQUS中以直接作图的方式获取图像。这种方法尽管不存在图像失真,但是却很烦琐,甚至是不可能达到的。因为组成RVE的Voronoi晶胞数以千计,数据庞大,手工作图局限性很大。因此,必须在ABAQUS中找到某种程序语言的接口,通过这种接口,再利用ABAQUS的脚本语言 [2,3],就可以实现程序化作图,从而避免手工作图的烦杂和精确程度不高的问题,大大提高绘图效率。
在对ABAQUS与CAD [3] 的接口方式和现有ABAQUS软件的相关二次开发功能进行了综合分析后,最终选定了两套方案:在第一套方案中,充分利用了CAD强大的绘图功能,用CAD 的脚本语言编写了晶粒的绘图程序,正如所预想的,CAD将需要的晶粒自动绘制成了标准图形。将其导入ABAQUS软件中,并对其进行了网格划分,效果是令人满意的。
尽管上述方案已经达到了程序化绘图的目的,但是在作图中涉及到多方软件,以及CAD与CAE之间的图形转换接口问题,因而给具体的操作过程带来了诸多不便,于是,设计出了第二种方案:在第二种方案中,使用了自己开发的软件TransMesh,生成了ABAQUS的Part 脚本文件,直接在ABAQUS中生成了微观组织结构。至此,完全解决了在有限元软件中建立微观组织结构的模型这一关键性的问题,使微观组织结构模型在有限元软件中得以真实的再现。
4. 软件TransMesh简介
众所周知,在微观组织结构的有限元建模过程中,网格划分是最为核心的问题。对于同种类型的晶粒而言,利用软件对其进行有限元网格划分的方法和有限元网格划分的过程都是类似的,因此,完全有必要将这些重复的作图过程程序化,对数据进行实时输入,对参数进行实时选择,从而达到参数化作图的目的。为此,开发了软件TransMesh,并实现了与有限元商业软件ABAQUS的接口。TransMesh 软件是自主开发的软件,应用于异质体材料微观组织结构的有限元网格划分。其主要功能是用于异质体材料微观组织结构的晶粒生成,实现网格划分的程序化以及实现异质体材料微观组织结构有限元计算的参数化。在软件的编写过程中,使用了C程序语言 [5] 和面向对象的Python [6,7]脚本语言。将TransMesh软件的运行结果在ABAQUS中执行,便实现了微观组织结构的有限元网格划分。图2显示了TransMesh软件的主体结构。它主要包含复合材料微观组织结构、短纤维增强复合材料微观组织结构、两相多晶体材料微观组织结构、块体增强复合材料微观组织结构、纳米级多晶体材料微观组织结构和纳米级多晶体复合材料微观组织结构等六个模块,开发软件的目的就是为了实现这六个模块微观组织结构的有限元的网格划分。
图 2 TransMesh软件的主体框架
以多晶体材料为机体的复合材料微观组织结构为例,图3(b) 即是一个认为满意的多晶体材料RVE的网格划分图形。从图中可以看出,就每个晶粒而言,晶粒边界上网格节点的分布是均匀的,而就整个RVE区域而言,晶粒与晶粒间网格是连续的,均匀过渡的。由此可以认为这种网格划分的效果是良好的。
运用同样的思路,同时结合所研究对象的不同情况,成功地完成了多个异质体材料微观组织结构模块的二维有限元网格划分。
(1) 多晶体材料微观组织结构模块:此模块的基体材料均为多晶体材料,无夹杂。其中图3(a) 是数字化后的多晶体微观组织结构几何图形,在图3(b) 中用混合节点单元对其进行了网格划分,可以看出,所有的网格都是均匀的、连续过渡的。图3(c)中,对其中一个特定晶粒的每条边赋予了较其他晶粒的每条边更多的节点,于是在这个晶粒中形成了更大的网格密度。图3(d) 是一个界面材料,它由两相多晶体组成,在网格划分的过程中,用混合节点单元分别对两种多晶体材料进行网格划分,然后对两者进行复合,就得到这种界面材料的网格划分图。
图3 多晶体材料微观组织结构有限元网格划分
(2) 短纤维增强复合材料微观组织结构模块:此模块的基体相为多晶体材料,增强相为短纤维。图4(a) 是一张数字化的短纤维增强复合材料微观组织结构几何图形,在图4(b)中,将椭圆状短纤维看作夹杂,为了在椭圆夹杂内形成更大的网格密度,将夹杂的椭圆边界赋予了更多的节点,从而使其网格密度大于周围的基体相,然后将网格划分后的基体相和增强相进行复合,从而得到图4(b) 所示的网格划分图。图4(c) 中,将椭圆状短纤维看成了孔洞或微裂纹。此时,只需要对基体相进行网格划分即可。在实际操作中,直接将椭圆状短纤维挖成孔洞,并采用了三节点单元对其周边的基体相进行了网格划分。
图4 短纤维增强复合材料微观组织结构网格划分
(3) 块体增强复合材料微观组织结构模块:此模块的基体相为多晶体材料,增强相为块状多晶体。图5(a) 是这种模块数字化的块体增强复合材料微观组织结构几何图形。
图5(b) 和图5(c) 中,将块体增强相看作夹杂,图5(b) 中,首先在软件中将基体相和块体增强相进行复合,然后用混合节点单元对其进行均匀的网格划分。相比较而言,在图5(c) 中,用三节点单元对其中的块体增强相进行了局部的细化。在图5(d) 和图5(e) 中,将块体增强相都看成了缺陷,并且在图5(e) 中,用三节点单元对特定块体缺陷周围的基体相进行了网格的局部细化。
图5 块体增强复合材料微观组织结构网格划分
(4) 两相多晶体材料微观组织结构模块:此模块由两种不同的多晶体材料组成。图6(a)是一张数字化的两相多晶体材料微观组织结构几何图形。此模块中,将其中一种多晶体材料看作基体相,另一相多晶体材料看作增强相。在图6(b) 中,先将两相多晶体材料进行复合,然后用混合节点单元对整个晶粒区域进行了均匀的网格划分。在图6(c) 和图6(d) 中,采用混合节点单元仅仅对其中的基体相材料进行网格划分,而把另一相看作夹杂。网格划分完毕后将两者进行复合,即得到图6(c) 和图6(d) 所示的网格划分图。
图6 两相多晶体材料微观组织结构网格划分
(5) 纳米级多晶体材料微观组织结构模块:与多晶体材料微观组织结构模块相比,此模块的基体相为纳米级多晶体材料,此时晶界已成为不可忽略的因素。图7(a) 是一张数字化的纳米级多晶体材料微观组织结构图,在图7(b) 中,采用三节点单元对其进行了网格划分,并且对晶界部分进行了局部的细化。
图7 纳米级多晶体材料微观组织结构网格划分
(6) 纳米级多晶体复合材料微观组织结构模块:此模块中的基体相为纳米级多晶体复合材料,椭圆状短纤维为增强相。图8(a) 是数字化的纳米级多晶体复合材料微观组织结构几何复合材料微观组织结构模块类似,在图8(b) 中,把椭圆状短纤维看作夹杂,并用三角节点对其进行了局部细化,而在图8(c) 中,将椭圆状短纤维看作是微裂纹,因此,在微裂纹内部不需要进行网格划分。
图8 纳米级复合材料微观组织结构网格划分
5. 讨论与结论
通过以上所描述的有限元建模思路,利用TransMesh软件,成功地将代表异质体材料微观组织结构的数字化的Voronoi晶胞在高级有限元程序 ABAQUS中得以再现。然而,这仅仅是几何意义上的再现,在有限元网格划分中是不够的。因为理论上,材料微观组织结构RVE是一个平面图形,反映在 ABAQUS高级有限元中应该是一个二维壳单元。然而,在建模过程中发现,如果简单的将上述RVE图形直接赋予ABAQUS进行有限元计算,ABAQUS 则将其识别为二维杆结构,这是不可想象的。因为现阶段所模拟的实际微观组织结构是一个平面结构,如果用杆单元进行计算,显然与实际不相符合,从而使计算结果失去了实际意义。所以,在进行有限元分析之前,必须将二维壳单元赋给研究对象。如图6(c) 所示,对具有二维壳单元的RVE进行了网格划分,达到了预期的目的。实践证明,网格划分的效果是令人满意的。
ABAQUS常用技巧归纳(图文并茂).
ABAQUS学习总结 1.ABAQUS中常用的单位制。-(有用到密度的时候要特别注意) 单位制错误会造成分析结果错误,甚至不收敛。 2.ABAQUS中的时间 对于静力分析,时间没有实际意义(静力分析是长期累积的结果)。对于动力分析,时间是有意义的,跟作用的时间相关。 3.更改工作路径 4.对于ABAQUS/Standard分析,增大内存磁盘空间会大大缩短计算 时间;对于ABAQUS/Explicit分析,生成的临时数据大部分是存储在内存中的关键数据,不写入磁盘,加快分析速度的主要方法是提高CPU的速度。 临时文件一般存储在磁盘比较大的盘符下
提高虚拟内存
5.壳单元被赋予厚度后,如何查看是否正确。 梁单元被赋予截面属性后,如休查看是否正确。 可以在VIEW的DISPLAY OPTION里面查看。 6.参考点 对于离散刚体和解析刚体部件,参考点必须在PART模块里面定义。而对于刚体约束,显示休约束,耦合约束可以在PART ,ASSEMBLY,INTERRACTION,LOAD等定义参考点. PART模块里面只能定义一个参考点,而其它的模块里面可以定义很多个参考点。
7.刚体部件(离散刚体和解析刚体),刚体约束,显示体约束 离散刚体:可以是任意的形状,无需定义材料属性,要定义参考点,要划分网格。 解析刚体:只能是简单形状,无需定义材料属性,要定义参考点,不需要划分网格。 刚体约束的部件:要定义材料属性,要定义参考点,要划分网格。显示体约束的部件:要定义材料属性,要定义参考点,不需要要划分网格(ABAQUS/CAE会自动为其要划分网格)。 刚体与变形体比较:刚体最大的优点是计算效率高,因为它在分析作业过程中不参与所在基于单元的计算,此外,在接触分析,如果主面是刚体的话,分析更容易收敛。 刚体约束和显示体约束与刚体部件的比较:刚体约束和显示体约束的优点是去除约束后,就可以立即变为变形体。 刚体约束与显示体约束的比较:刚体约束的部件会参与计算,而显示约束的部件不会参与计算,只是用于显示作用。 8.一般分析步与线性摄动分析步 一般分析步:每个分析步的开始状态都是前一个分析步结束时刻的模型状态; 如果不做修改的话,前一个分析步所施加的载荷,边界条件,约束都会延续到当前的分析步中;所定义的载荷,边界条件以及得到的分析结果都是总量。
本人学习abaqus五年的经验总结-让你比做例子快十倍
第二章 ABAQUS 基本使用方法 [2](pp15)快捷键:Ctrl+Alt+左键来缩放模型;Ctrl+Alt+中键来平移模型;Ctrl+Alt+右键来旋转模型。 ②(pp16)ABAQUS/CAE 不会自动保存模型数据,用户应当每隔一段时间自己保存模型以避免意外丢失。 [3](pp17)平面应力问题的截面属性类型是Solid(实心体)而不是Shell(壳)。 ABAQUS/CAE 推荐的建模方法是把整个数值模型(如材料、边界条件、载荷等)都直接定义在几何模型上。载荷类型Pressure 的含义是单位面积上的力,正值表示压力,负值表示拉力。 [4](pp22)对于应力集中问题,使用二次单元可以提高应力结果的精度。 [5](pp23)Dismiss 和Cancel 按钮的作用都是关闭当前对话框,其区别在于:前者出现在包含只读数 据的对话框中;后者出现在允许作出修改的对话框中,点击Cancel 按钮可关闭对话框,而不保存 所修改的内容。 [6](pp26)每个模型中只能有一个装配件,它是由一个或多个实体组成的,所谓的“实体”(instance) 是部件(part)在装配件中的一种映射,一个部件可以对应多个实体。材料和截面属性定义在部件上,相互作用(interaction)、边界条件、载荷等定义在实体上,网格可以定义在部件上或实体上,对求解过程和输出结果的控制参数定义在整个模型上。 [7](pp26) ABAQUS/CAE 中的部件有两种:几何部件(native part)和网格部件(orphan mesh part)。 创建几何部件有两种方法:(1)使用Part 功能模块中的拉伸、旋转、扫掠、倒角和放样等特征来直 接创建几何部件。(2)导入已有的CAD 模型文件,方法是:点击主菜单File→Import→Part。网格部件不包含特征,只包含节点、单元、面、集合的信息。创建网格部件有三种方法:(1)导入ODB 文件中的网格。(2)导入INP 文件中的网格。(3)把几何部件转化为网格部件,方法是:进入Mesh 功能模块,点击主菜单Mesh→Create Mesh Part。 [8](pp31)初始分析步只有一个,名称是initial,它不能被编辑、重命名、替换、复制或删除。在初始分析步之后,需要创建一个或多个后续分析步,主要有两大类:(1)通用分析步(general analysis step)可以用于线性或非线性分析。常用的通用分析步包含以下类型: —Static, General: ABAQUS/Standard 静力分析 —Dynamics, Implicit: ABAQUS/Standard 隐式动力分析 —Dynamics, Explicit: ABAQUS/ Explicit 显式动态分析 (2)线性摄动分析步(linear perturbation step)只能用来分析线性问题。在ABAQUS/Explicit 中 不能使用线性摄动分析步。在ABAQUS/Standard 中以下分析类型总是采用线性摄动分析步。 —Buckle: 线性特征值屈曲。 —Frequency: 频率提取分析。 —Modal dynamics: 瞬时模态动态分析。 —Random response: 随机响应分析。 —Response spectrum: 反应谱分析。 —Steady-state dynamics: 稳态动态分析。 [9](pp33)在静态分析中,如果模型中不含阻尼或与速率相关的材料性质,“时间”就没有实际的物 理意义。为方便起见,一般都把分析步时间设为默认的 1。每创建一个分析步,ABAQUS/CAE 就会自动生成一个该分析步的输出要求。 [10] (pp34)自适应网格主要用于ABAQUS/Explicit 以及ABAQUS/Standard 中的表面磨损过程 模拟。在一般的ABAQUS/Standard 分析中,尽管也可设定自适应网格,但不会起到明显的作用。 Step 功能模块中,主菜单Other→Adaptive Mesh Domain 和Other→Adaptive Mesh Controls 分别 设置划分区域和参数。 [11](pp37)使用主菜单Field 可以定义场变量(包括初始速度场和温度场变量)。有些场变量与分析步有关,也有些仅仅作用于分析的开始阶段。使用主菜单Load Case 可以定义载荷状况。载荷状况由一系列的载荷和边界条件组成,用于静力摄动分析和稳态动力分析。
ABAQUS实体单元类型总结
在ABAQUS中,基于应力/位移的实体单元类型最为丰富: (1)在ABAQUS/Sandard中,实体单元包括二维和三维的线性单元和二次单元,均可以采用完全积分或缩减积分,另外还有修正的二次Tri单元(三角形单元)和Tet单元(四面体单元),以及非协调模式单元和杂交单元。 (2)ABAQUS/Explicit中,实体单元包括二维和三维的线性缩减积分单元,以及修正的二次二次Tri单元(三角形单元)和Tet单元(四面体单元),没有二次完全积分实体单元。 ------------------------------------------------------------------------------------------------------------ 按照节点位移插值的阶数,ABAQUS里的实体单元可以分为以下三类: 线性单元(即一阶单元):仅在单元的角点处布置节点,在各个方向都采用线性插值。 二次单元(即二阶单元):在每条边上有中间节点,采用二次插值。 修正的二次单元(只有Tri 或Tet 才有此类型):在每条边上有中间节点,并采用修正的二次插值。 ******************************************************************************* *************** 1、线性完全积分单元:当单元具有规则形状时,所用的高斯积分点的数目足以对单元刚度矩阵中的多项式进行精确积分。 缺点:承受弯曲载荷时,会出现剪切自锁,造成单元过于刚硬,即使划分很细的网格,计算精度仍然很差。 2、二次完全积分单元: 优点: (1)应力计算结果很精确,适合模拟应力集中问题; (2)一般情况下,没有剪切自锁问题(shear locking)。 但使用这种单元时要注意: (1)不能用于接触分析; (2)对于弹塑性分析,如果材料不可压缩(例如金属材料),则容易产生体积自锁(volumetric locking);
abaqus网格划分
如何使用3D实体单元? 1 如果不需要模拟非常大的应变或进行一个复杂的、改变接触条件的问题,则应采用二次减缩 积分单元(CAX8R,CRE8R,CPS8R.C3D20R等)。 2 如果存在应力集中,则应在局部采用二次完全积分单元(CAX8,CPE8,CPS8,C3D20等)。它 们可在较低费用下对应力梯度提供最好的解决。尽量不要使用线性减缩积分单元。用细化的二次减缩积分单元与二次完全积分单元求解结果相差不大,且前者时间短。 3 对含有非常大的网格扭曲模拟(大应变分析),采用细网格划分的线性减缩积分单元 (CAX4R,CPE4R.CPS4R,C3D8R等)。 4 对接触问题采用线性减缩积分单元或非协调单元(CAX4I,CPE4I,CPS4II,C3D8I等)的细网 格划分。 5 对以弯曲为主的问题,如能保证所关心部位单元扭曲较小,使用非协调单元(如C3D8I), 求解很精确。 6 对于弹塑性分析,不可压缩材料(如金属),不能使用二次完全积分单元,否则易体积自锁, 应使用修正的二次三角形或四面体单元、非协调单元,以及线性减缩积分单元。若使用二次减缩积分单元,当应变超过20%-40%要划分足够密的网格。 7 除平面应力问题之外,如材料完全不可压缩(如橡胶),应使用杂交单元; 在某些情况下,近似不可压缩材料也应使用杂交单元。 8 当几何形状复杂时,万不得已采用楔形和四面体单元。这些单元的线性形式,如C3D6和 C3D4,是较差的单元(若需要时,划分较细的网格以使结果达到合理的精度),这些单元也应远离需要精确求解的区域。 9 如使用了自由网格划分技术,四面体单元应选二次的,其结果对小位移问题应该是合理的, 但花时间多。在ABAQUS/Standard中选C3D10,ABAQUS/Explicit中选修正的(C3D10M)。 如有大的塑性变形,或模型中存在接触,且使用默认的“硬”接触关系,也应选C3D10M。 10 ABAQUS/Explicit模拟冲击或爆炸,应选线性单元。
Abaqus划分网格技巧小结
Abaqus中三维几何体生成结构网格的分割方法图1 可以直接生成结构网格的三维几何体图2 不可以直接生成结构网格的三维几何体几何体中有孔圆弧≥900 有不能生成二 维结构网格的面一个项点有三条以上的边共用图3 分割示例无法生成结构网格的问题分割示例 1 几何体中有孔如将孔分割成半圆或者1/4圆从而去除孔 2 圆弧≥900 如将1800圆弧分成两个900圆弧3 有不能生成二维结构网格的面如半圆周面只含有二个边而一个面至少含有三条以上的边界才能生成二维结构网格所以将半圆分半这样每个面便 有三条边 4 一个顶点只能有三条边共用 5 一个区域至少 有四个面如四面体6 如果区域中包含拓朴关系则这个区域只能有六个面。如果多于六个面则如图4所示可以使用virtual topology对面进行合并直至所含的面只有六个面。图4 使用virtual topology对面进行合并直至所含的面只有六个面7 面与面之间的角度最好接近于90°如果面与面角度 ≥1500则需进行分割8 对区域中的每个面则有以下要求8.1如果区域不是立方体cube则其面必须是一个整面单一面不能含有多个面片8 8.2 如果区域是立方体cubea side can be a connected set of faces that are on the same geometric surface. In addition the pattern of the faces must allow rows and columns of hexahedral elements to be created in a regular grid pattern along that entire side when the cube is meshed. For example Figure 5
学习abaqus五年的经验总结,
第二章ABAQUS基本使用方法 [2](pp15)快捷键:Ctrl+Alt+左键来缩放模型;Ctrl+Alt+中键来平移模型;Ctrl+Alt+右键来旋转模型。 ②(pp16)ABAQUS/CAE不会自动保存模型数据,用户应当每隔一段时间自己保存模型以避免意外丢失。 [3](pp17)平面应力问题的截面属性类型是Solid (实心体)而不是Shell (壳)。 ABAQUS/CAE推荐的建模方法是把整个数值模型(如材料、边界条件、载荷等)都直接定义在几何模型上。载荷类型Pressure 的含义是单位面积上的力,正值表示压力,负值表示拉力。 [4](pp22) 对于应力集中问题,使用二次单元可以提高应力结果的精度。 [5](pp23)Dismiss 和Cancel 按钮的作用都是关闭当前对话框,其区别在于:前者出现在包含只读数 据的对话框中;后者出现在允许作出修改的对话框中,点击Cancel 按钮可关闭对话框,而不保存 所修改的内容。 [6](pp26) 每个模型中只能有一个装配件,它是由一个或多个实体组成的,所谓的“实体”( instance) 是部件(part )在装配件中的一种映射,一个部件可以对应多个实体。材料和截面属性定义在部件上,相互作用 ( interaction )、边界条件、载荷等定义在实体上,网格可以定义在部件上或实体上,对求解过程和输出结果的控制 参数定义在整个模型上。 [7](pp26) ABAQUS/CAE 中的部件有两种:几何部件( native part)和网格部件(orphan mesh part )。 创建几何部件有两种方法: ( 1)使用Part 功能模块中的拉伸、旋转、扫掠、倒角和放样等特征来直 接创建几何部件。(2)导入已有的CAD模型文件,方法是:点击主菜单File宀Import宀Part。网格部件不包含特征,只包含节点、单元、面、集合的信息。创建网格部件有三种方法: (1)导入ODB 文件中的网格。( 2)导入INP 文件中的网格。 (3)把几何部件转化为网格部件,方法是:进入Mesh 功能模块,点击主菜单Mesh T Create Mesh Part。 [8](pp31)初始分析步只有一个,名称是initial,它不能被编辑、重命名、替换、复制或删除。在初始分析步 之后,需要创建一个或多个后续分析步,主要有两大类:(1)通用分析步(general analysis step)可以用于 线性或非线性分析。常用的通用分析步包含以下类型: —Static, General: ABAQUS/Standard 静力分析 —Dynamics, Implicit: ABAQUS/Standard 隐式动力分析 —Dynamics, Explicit: ABAQUS/ Explicit 显式动态分析 (2)线性摄动分析步( linear perturbation step )只能用来分析线性问题。在ABAQUS/Explicit 中不能使用线性摄 动分析步。在ABAQUS/Standard 中以下分析类型总是采用线性摄动分析步。 —Buckle: 线性特征值屈曲。 —Frequency: 频率提取分析。 —Modal dynamics: 瞬时模态动态分析。 —Random response: 随机响应分析。 —Response spectrum: 反应谱分析。 —Steady-state dynamics: 稳态动态分析。 [9]( pp33)在静态分析中,如果模型中不含阻尼或与速率相关的材料性质,“时间”就没有实际的物 理意义。为方便起见,一般都把分析步时间设为默认的 1。每创建一个分析步,ABAQUS/CAE就会自动生成一个该分析步的输出要求。 [10]( pp34)自适应网格主要用于ABAQUS/Explicit以及ABAQUS/Standard中的表面磨损过程 模拟。在一般的ABAQUS/Standard 分析中,尽管也可设定自适应网格,但不会起到明显的作用。 Step 功能模块中,主菜单Other t Adaptive Mesh Domain 和Other t Adaptive Mesh Controls 分别设置划分区域和参数。 [11](pp37)使用主菜单Field可以定义场变量(包括初始速度场和温度场变量) 。有些场变量与分析步有关,也有些仅仅作用于分析的开始阶段。使用主菜单Load Case可以定义载荷状况。载荷状况由一系列的 载荷和边界条件组成,用于静力摄动分析和稳态动力分析。 [12]( pp42)独立实体是对部件的复制,可以直接对独立实体划分网格,而不能对相应的部件划分网格。非独立实体
ABAQUS 划分网格的方法(读书总结)
划分网格的方 1.独立实体(independent instance)和非独立实体(dependent instance) 对非独立实体划分网格时,应在窗口顶部的环境栏中把Object选项设为part,即对部件划分网格; 对独立实体划分网格时, 应在窗口顶部的环境栏中把Object选项设为assembly,即对装配件划分网格 2.网格单元形状 在MESH功能模块中,Mesh—Controls,弹出Mesh Controls对话框,其中可选择单元形状。2D问题,有以下可供选择的单元形状。 1)Quad:网格中完全使用四边形单元; 2)Quad-dominated:网格中主要使用四边形单元,但在过渡区域允许出现三角形单元。选择 Quad-dominated类型更容易实现从粗网格到细网格的过渡; 3)Tri:网格中完全使用三角形单元; 对于3D问题,包括以下可供选择的单元形状: 1)Hex:网格中完全使用六面体单元; 2)Hex-dominated:网格中主要使用六面体单元,但在过渡区域允许出现楔形(三棱柱)单元; 3)Tet:网格中完全使用四面体单元; 4)Wedge:网格中完全使用楔形单元; Quad(2D问题)和Hex(3D问题)可以用较小的计算代价得到较高的精度,应尽可能选择这两种单元。 3.网格划分技术 Structured(结构化网格):采用结构化网格的区域显示为绿色; Sweep(扫掠网格):采用扫掠网格的区域显示为黄色; Free(自由网格):采用自由网格的区域显示为粉红色; 自由网格技术采用Tri和Tet,一般应选择带内部节点的二次单元来保证精度;结构化网格和扫掠网格一般采用Quad和Hex单元,分析精度相对较高。 4.划分网格的算法 使用Quad和Hex单元划分网格时,有两种可供选择的算法:Medial Axis(中性轴算法)和Advancing Front(进阶算法)。 Medial Axis(中性轴算法):首先把要划分网格的区域分成一些简单的区域,然后使用结构化网格划分技术来为简单区域划分网格。Medial Axis(中性轴算法)算法有以下特性: 1)使用Medial Axis(中性轴算法)更容易得到单元形状规则的网格,但网格和种子的位置吻合较差; 2)在二维模型中使用Medial Axis(中性轴算法),选择Minimize the mesh transition(最小化网格过渡),可以提高网格的质量,但使用这种方法生成的网格更容易偏离种子。 3)如果在模型的一部分边上定义了受完全约束的种子,Medial Axis(中性轴算法)会自动为其他的边选择最佳的种子分布; 4)Medial Axis算法不支持由CAD模型导入的不精确模型和虚拟拓扑。 Advancing Front(进阶算法):首先在边界上生成四边形网格,然后再向区域内部扩展。具有以下特性: 1)使用Advancing Front算法得到的网格可以和种子的位置吻合的很好,但在较窄的区域内,精确匹配每粒种子可能使网格歪斜; 2)使用Advancing Front算法更容易得到单元大小均匀的网格。在Explicite,网格的小单元会限制增量步长。 3)使用Advancing Front算法更容易得到从粗网格到细网格的过渡; 5. 网格划分失败的解决方法
Abaqus实例教程——网格划分
Workshop 9 自動型與掃掠型網格建構技術: 幫浦模型 w9-meshing.avi Introduction(介紹) 在本練習中你將會使用ABAQUS/CAE 中的Mesh 模組來為整個幫浦組裝模型建構 有限元素網格. 需要做的工作包括將網格屬性指定給每一個組件, 指定網格的種子點, 以及建立網格. Modifying the pump housing element type(修改幫浦外殼元素類型) 1.從../IntroClass/workshops/ pump目錄啟動 ABAQUS/CAE 並且開啟 模型的資料檔Pump.cae. 2.在模型樹中, 將零件PUMP-1展開並在其中的Mesh上快點兩下將工作環境 切換到 Mesh 模組然後在PUMP-1上開始工作. 3.按照以下的步驟來製做一個組別(set)在其中將包含組成幫浦外殼的全部元素: a.在模型樹中, 將零件PUMP-1展開並在其中的Sets 上快點兩下. b.在Create Set對話框中, 選取Element作為組別類型. 將此組別取名 為pump-mesh然後按下Continue按鈕. c.使用拉方框的方式將幫浦外殼的全部元素都選起來. 如果有必要的話 可以使用選取過濾器. 選好之後按下Done按鈕. 4.使用Query指令來確認目前你所指定到網格中的元素類型: a.從上方的下拉式功能表中, 選取Tools→Query功能選項. 會彈出Query對話框. b.從其中所列出來的General Queries中, 選取Element然後按下Apply 按鈕. 在任一元素上點一下並注意在訊息區中所列出來的元素編號, 類 型, 以及節點連接順序, 如圖 W9–1 中所示. 重複這個程序檢查此網格 中的其它元素. Figure W9–1 Selected element attributes. c.按下在Query對話框中的Cancel按鈕結束此查詢指令.
典型零件ABAQUS网格划分
ABAQUS 网格划分经典总结 ABAQUS是大型通用的有限元分析软件,其强大的功能是对非线性的处理优于其他同类软件。它的网格划分功能,可以说是相当强的,当然这得掌握其中奥秘。运用合理,不亚于专业的网格划分软件,比如HM和ADINA,甚至比专业划分软件更优越和快捷。 本人对ABAQUS 网格划分的研究思路来源于HM的网格划分思路,也借鉴了NASTRAN的网格划分思路。现在深知知识面广泛的重要性,每个软件都有它独当一面的地方,也有它不足之处,我们可以借鉴、学习其他软件的优点,并将优点运用于同类软件,弥补各类软件之不足。综合运用各软件的优点,来达到优势互补,熟能生巧,巧能通精的目的。 以下列出各类零件中最具代表性的一些典型零部件,相信通过这些零件的网格划分练习,一般的机械零部件的网格划分不再是问题。 图 1 轴承座类零件
图 2 多支耳类零件 图 3 箱体类零件
图 4 空心圆柱与箱体组合零件 图 5 环形槽类零件
图 6.1 支耳、空心圆柱、空心长方体组合零件 图 6.2支耳、空心圆柱、空心长方体组合零件
图 7.1 类齿轮零件 图 7.2类齿轮零件 这类零件的网格划分,ABAQUS确实不如HM优越,HM先在一个片体上进行网格划分,然后使用spin功能,进行旋转,很容易得到网格质量比较高的网格模型,而ABAQUS需要经过多次剖切才能得到网格质量较高的模型。
图 8.1 剖切后网格控制显示 剖切后,颜色显示为黄色和绿色,能用结构化和扫略网格划分技术。如果网格划分质量较差,可以使用ABAQUS独到的短边、小面检查功能,不难发现,网格质量差的原因是存在短边、小面,这时ABAQUS的虚拟拓扑功能方能解决此问题。使用虚拟拓扑后,网格划分质量是相对较高的。如果有尖锐角度存在,这时可根据需要要适当使用一些四面体单元。 图 8.2 网格完成后模型
Abaqus网格
Abaqus中三维几何体生成结构网格的分割方法 图1 可以直接生成结构网格的三维几何体 不可以直接生成结构网格的三维几何体 圆弧≥900 有不能生成 二维结构网格的面 一个项点有三条 以上的边共用图3 分割示例 分割示例 如将孔分割成半圆或者1/4圆,从而去除孔如将1800圆弧分成两个900圆弧 如半圆周面只含有二个边,而一个面至少含有三条以上 的边界才能生成二维结构网格,所以将半圆分半,这样 每个面便有三条边 一个顶点只能有三条边共用 一个区域至少有四个面,如四面体 如果区域中包含拓朴关系,则这个区域 所示可以使用virtual topology对面进行合并,直至所含的面只有六个面。
Figure 6 Unacceptable face patterns. Figure 7 A regular grid of elements cannot be created examples of acceptable connecting face patterns 图1 provides two examples of acceptable connecting face patterns
图4 Sweeping the mesh along a varying cross-section 工具将目标面上的面片合并起来,从而使其可以使用扫描 5 Combining faces makes a part swept meshable 对于旋转体,截面不能与旋转轴有任何相交的点,如图6所示。同样如图 截面的一条边与轴线相交,但如图8所示mesh the region with hexahedral-dominated elements by generating layers of wedge elements along the axis。 6 The swept meshing technique cannot mesh a part if an isolated point touches the 7 Abaqus/CAE cannot mesh a region with hexahedral elements if one or more edges lie along the axis of revolution
- abaqus切削模拟教程
- Abaqus操作方法
- Abaqus划分网格技巧小结
- Abaqus网格划分原则
- Abaqus仿真经典教程(通用版)
- 典型零件ABAQUS 网格划分
- abaqus网格划分
- 本人学习abaqus五年的经验总结,让你比做例子快十倍
- Abaqus实例教程——网格划分
- abaqus网格划分
- 本人学习abaqus五年的经验总结-让你比做例子快十倍
- Abaqus划分网格技巧小结
- ABAQUS网格技术孤立网格网格划分
- abaqus 网格划分
- Abaqus网格划分
- ABAQUS实体单元类型总结
- 学习abaqus五年的经验总结,
- abaqus网格划分
- 典型零件ABAQUS网格划分
- 第六节Abaqus网格划分