UnifiedSolvingJacobianHessianMatricesofSome Parallel ManipulatorswithSPSActiveLegsandaConstrainedLeg

Yi Lu
e-mail:luyi@https://www.wendangku.net/doc/3c17995756.html,
Bo Hu
School of Mechanical Engineering,
Yanshan University,
Qinhuangdao,
Hebei066004,China Uni?ed Solving Jacobian/Hessian Matrices of Some Parallel Manipulators With n SPS Active Legs and a Passive Constrained Leg
Some parallel manipulators with n spherical joint-prismatic joint-spherical joint(SPS)-type active legs and a passive constrained leg possess a larger capability of load bearing and are simple in structure of the active leg.In this paper,a uni?ed and simple approach is proposed for solving Jacobian/Hessian matrices and inverse/forward velocity and ac-celeration of this type of parallel manipulators.First,a general parallel manipulator with n SPS-type active legs and one passive constrained leg in various possible serial structure is synthesized,and some formulae for solving the poses of constrained force/ torque and active/constrained force matrix are derived.Second,the formulae for solving extension of active legs,the auxiliary velocity/acceleration equation are derived.Third, the formulae for solving inverse/forward velocity and acceleration and a Jacobian matrix without the?rst-order partial differentiation and a Hessian matrix without the second-order partial differentiation are derived.Finally,the procedure is applied to three par-allel manipulators with four and?ve SPS-type active legs and one passive constrained leg in different serial structures and to illustrate.?DOI:10.1115/1.2771572?Keywords:parallel manipulator,constrained leg,kinematics,Jacobian matrix,Hessian matrix
1Introduction
Some parallel manipulators with3–6degree of freedoms ?DOFS?have been used in many practical applications?1,2?. Among them,the parallel manipulators with n?6SPS-type active legs and one passive constrained leg in various serial structures have attracted more attention.This kind of parallel manipulator has a larger capability of load bearing and a simple structure of active leg?3–6?.In the aspect of kinematics,Tesar proposed a kinematic in?uence coef?cient of mechanisms?7,8?.Huang et al. studied the?rst-second-order kinematic in?uence coef?cient ma-trices which are later proved to be Jacobian/Hessian matrices?2?. Duffy and Rico et al.analyzed kinematics of the6-6R parallel manipulator and solved acceleration of open/closed spatial chains by means of screw theory?9,10?.Joshi and Tsai studied the Jaco-bian matrix for mechanisms with less than6DOF by using screw theory?11?.Kim and Ryu derived a homogeneous Jacobian matrix formulation by three end-effector points?12?.Fang and Huang solved velocity/acceleration of a3-RPS?revolute joint-prismatic joint-spherical joint?manipulator by using the?rst-/second-order kinematic in?uence coef?cient matrices?13?.Can?eld et al.ana-lyzed velocity of parallel manipulators by truss transformations ?14?.Lu et al.solved the velocity/acceleration and Jacobian ma-trix of some spatial parallel manipulators by using an analytic approach and a computer-aided design?CAD?variation geometry approach?15–17?.Gallardo-Alvarado et al.analyzed kinematics and singularity of a4-DOF parallel manipulator using screw theory?18?.Using the principle of virtual work,Tsai solved in-verse dynamics of use Stewart–Gough manipulator?19?.Others studied Jacobian matrix and singularity?20,21?.
Since each of the items in Jacobian/Hessian matrices is the ?rst-/second-order partial differentiation,this imposes dif?culties on kinematics analysis of parallel manipulators.In addition,the forward pose equations of parallel manipulators generally are the implicit functions and have multisolutions.Therefore,to solve forward velocity/acceleration by means of the?rst-/second-order matrix approach is quite complex.
This paper focuses on a uni?ed and simple approach for deriv-ing Jacobian/Hessian matrices of the inverse/forward velocity and
acceleration for parallel manipulator with n?6SPS-type active legs and one passive constrained leg in various serial structures. Two types of parallel manipulators with four,?ve SPS-type active legs and one passive constrained leg are presented to illustrate how to solve their Jacobian/Hessian matrices and velocity/ acceleration.
2The Common Kinematics
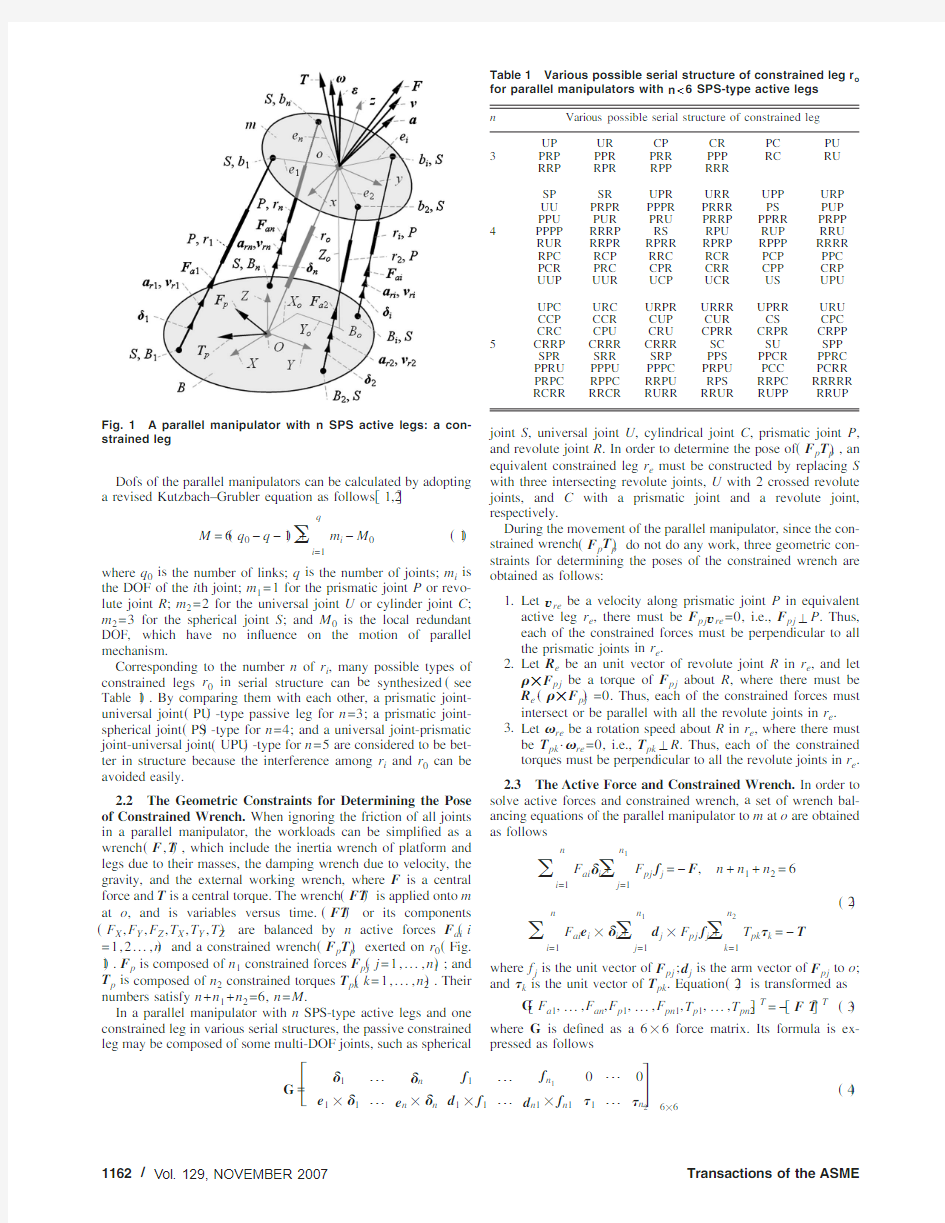
2.1A Parallel Manipulator With n SPS-Type Active Legs and One Constrained Leg in Various Serial Structure.Gener-ally,a parallel manipulator with n SPS active legs and one passive
constrained leg r0includes a base B,a platform m,and n linear
SPS active legs r i?i=1,2,...,n?6?with the linear actuators and one passive constrained leg r0in various serial structures?see Fig.
1?.Let?m?be a coordinate o-xyz?xed on m at o;?B?be a coordinate O-XYZ?xed on B at O;e i be the distance from b i to o; and E i be the distance from B i to O.
Each of r i connects m at joint b i with B at joint B i,provides one
constraint to m,and bears an active force F ai exerted on and along
r i.The constrained leg r0connects m at joint o with B at joint O,
provides6-n constraints to m,and bears6-n constrained forces or
torques exerted on r0.
Contributed by the Mechanisms and Robotics Committee of ASME for publica-tion in the J OURNAL OF M ECHANICAL D ESIGN.Manuscript received August5,2006;?nal manuscript received November15,2006.Review conducted by Qizheng Liao.
Dofs of the parallel manipulators can be calculated by adopting a revised Kutzbach–Grubler equation as follows ?1,2?
M =6?q 0?q ?1?+
?i =1
q
m i ?M
?1?
where q 0is the number of links;q is the number of joints;m i is the DOF of the i th joint;m 1=1for the prismatic joint P or revo-lute joint R ;m 2=2for the universal joint U or cylinder joint C ;m 2=3for the spherical joint S ;and M 0is the local redundant DOF,which have no in?uence on the motion of parallel mechanism.
Corresponding to the number n of r i ,many possible types of constrained legs r 0in serial structure can be synthesized ?see Table 1?.By comparing them with each other,a prismatic joint-universal joint ?PU ?-type passive leg for n =3;a prismatic joint-spherical joint ?PS ?-type for n =4;and a universal joint-prismatic joint-universal joint ?UPU ?-type for n =5are considered to be bet-ter in structure because the interference among r i and r 0can be avoided easily.
2.2The Geometric Constraints for Determining the Pose of Constrained Wrench.When ignoring the friction of all joints in a parallel manipulator,the workloads can be simpli?ed as a wrench ?F ,T ?,which include the inertia wrench of platform and legs due to their masses,the damping wrench due to velocity,the gravity,and the external working wrench,where F is a central force and T is a central torque.The wrench ?FT ?is applied onto m at o ,and is variables versus time.?FT ?or its components ?F X ,F Y ,F Z ,T X ,T Y ,T Z ?are balanced by n active forces F ai ?i =1,2...,n ?and a constrained wrench ?F p T p ?exerted on r 0?Fig.1?.F p is composed of n 1constrained forces F pj ?j =1,...,n 1?;and T p is composed of n 2constrained torques T pk ?k =1,...,n 2?.Their numbers satisfy n +n 1+n 2=6,n =M .
In a parallel manipulator with n SPS-type active legs and one constrained leg in various serial structures,the passive constrained leg may be composed of some multi-DOF joints,such as spherical
joint S ,universal joint U ,cylindrical joint C ,prismatic joint P ,and revolute joint R .In order to determine the pose of ?F p T p ?,an equivalent constrained leg r e must be constructed by replacing S with three intersecting revolute joints,U with 2crossed revolute joints,and C with a prismatic joint and a revolute joint,respectively.
During the movement of the parallel manipulator,since the con-strained wrench ?F p T p ?do not do any work,three geometric con-straints for determining the poses of the constrained wrench are obtained as follows:
1.Let v re be a velocity along prismatic joint P in equivalent active leg r e ,there must be F pj v re =0,i.e.,F pj ?P .Thus,each of the constrained forces must be perpendicular to all the prismatic joints in r e .
2.Let R e be an unit vector of revolute joint R in r e ,and let ??F pj be a torque of F pj about R ,where there must be R e ·???F pj ?=0.Thus,each of the constrained forces must intersect or be parallel with all the revolute joints in r e .
3.Let ?re be a rotation speed about R in r e ,where there must be T pk ·?re =0,i.e.,T pk ?R .Thus,each of the constrained torques must be perpendicular to all the revolute joints in r e .2.3The Active Force and Constrained Wrench.In order to solve active forces and constrained wrench,a set of wrench bal-ancing equations of the parallel manipulator to m at o are obtained as follows
?i =1
n
F
ai ?i
+
?j =1
n 1
F
pj f j
=?F ,
n +n 1+n 2=6
?2?
?i =1
n
F
ai e i
??i +
?j =1
n 1
d j ?F
pj f j
+
?k =1
n 2
T
pk ?k
=?T
where f j is the unit vector of F pj ;d j is the arm vector of F pj to o ;and ?k is the unit vector of T pk .Equation ?2?is transformed as
G ?F a 1,...,F an ,F p 1,...,F pn 1,T p 1,...,T pn 2?T =??F T ?T
?3?
where G is de?ned as a 6?6force matrix.Its formula is ex-pressed as follows G =
?
?1
ˉ?n
f 1
ˉ
f n 1
0ˉ
e 1??1ˉe n ??n d 1?
f 1ˉd n 1?f n 1?1ˉ?n 2
?
6?6
?4
?
Fig.1A parallel manipulator with n SPS active legs:a con-strained leg
Table 1Various possible serial structure of constrained leg r o for parallel manipulators with n <6SPS-type active legs n Various possible serial structure of constrained leg
UP UR CP CR PC PU 3
PRP PPR PRR PPP RC RU RRP RPR RPP RRR SP SR UPR URR UPP URP UU PRPR PPPR PRRR PS PUP PPU PUR PRU PRRP PPRR PRPP 4
PPPP RRRP RS RPU RUP RRU RUR RRPR RPRR RPRP RPPP RRRR RPC RCP RRC RCR PCP PPC PCR PRC CPR CRR CPP CRP UUP UUR UCP UCR US UPU UPC URC URPR URRR UPRR URU CCP CCR CUP CUR CS CPC CRC CPU CRU CPRR CRPR CRPP 5
CRRP CRRR CRRR SC SU SPP SPR SRR SRP PPS PPCR PPRC PPRU PPPU PPPC PRPU PCC PCRR PRPC RPPC RRPU RPS RRPC RRRRR RCRR
RRCR
RURR
RRUR
RUPP
RRUP
Thus,F ai ,F pj ,T pk can be solved as follows
?F a 1,...,F an ,F p 1,...,F pn 1,T p 1,...,T pn 2?6?1T =?G ?1?F T ?
T
?5?
2.4Inverse Displacement Kinematics.The position vectors B i
B of joints B i on B in ?B ?,the position vectors b i m of joints b i on
m in ?m ?,and position vectors b i B
of b i in ?B ?can be written as ?1,2?B i B =?X Bi
Y Bi Z Bi
?,
b i m =?x bi
y bi z bi
?,
R m B
=?
x l y l z l
x m y m z m x n y n z n
?,
o B =?X o
Y o
Z o
?
b i B =R m B b i m
+o B
?6a ?
where R B m is a rotational transformation matrix from ?m ?to ?B ?;
?X o ,Y o ,Z o ?are three position components of m at o in ?B ?;o B is a position vector of point o in ?B ?;and ?x l ,x m ,x n ,y l ,y m ,y n ,z l ,z m ,z n ?are nine orientation parameters of m ,which have the following constrained equations ?1,2?
x l 2+x m 2
+x n 2=1,y l 2+y m 2
+y n 2=1
z l 2+z m 2
+z n 2=1,
x l y l +x m y m +x n y n =0?6b ?
x l z l +x m z m +x n z n =0,
z l y l +z m y m +z n y n =0
The length of active legs r i ?i =1,2,...,n ?and the vectors r i of r i
can be solved as follows ?1,2?
r i =?b i B ?B i B ?,
r i =?X b i ?X Bi Y b i ?Y Bi Z b i ?Z Bi ?T
?7a ?
Based on the structure constraints of various parallel manipula-tors,6-M structure constrained equations can be derived.From
Eqs.?6a ?and ?7a ?and 6-M structure constrained equations,Eq.?7a ?can be simpli?ed as a set of common equations for solving r i as follows
r i =r i ??1,?2,...,?n ?
i =1,2,...,n
?7b ?
where ?i are n independent parameters among six pose parameters ?X o ,Y o ,Z o ,?,?,??,n ?6.
The unit vector ?i of r i and the vector e i of the line e i can be solved as below
?i =??ix
?iy ?iz ?=r i r i =
1
r i
?X b i ?X Bi Y b i ?Y Bi Z b i ?Z Bi
?,e i =?e ix
e iy e iz
?
=b i B ?o B
?8?
Suppose there are two vectors ?,?and a skew-symmetric matrix ?
?.They must satisfy following equations ?1,2??=??x
?y ?z
?,
?=??x ?y ?z
?,
?
?=?
??z ?y ?z
??x
??y
?x
?
???=?
??,?
?T =????9?
2.5Inverse Velocity/Acceleration Along the i th Active Leg.
Let V =?v ??T be a generalizing velocity of m at o ;v i be a velocity of m at joint b i ;then there must be v i =v +??e i ?i =1,2...,n ?.A velocity v ri along r i is derived as
?ri =?i ·?i =??+??e i ?·?i =?i ·?+?e i ??i ?·?=J ri V
?10?
J ri =??i T ?e i ??i ?T ?1?6
By differentiation of Eq.?10?with respect to time,an acceleration a ri along the i th active leg is derived as follows a ri =J ri A +J ˙ri
V A =?a ??T ,
a =?a x a ?a z ?T ,
?=??x ???z ?T ?11?
where J ˙ri is a 1?6differentiation matrix of J ri
;and A is a general acceleration of m .A differentiation ?˙i of unit vector ?i with re-spect to time is derived as follows
?˙i =??i ??i ?ri ?/r i =??+??e i ??i ?ri ?/r i
?12?
From Eq.?12?,the second item in Eq.?11?is expanded as J ˙ri V =??˙i T ?e ˙i ??i +e i ??˙i ?T ?V =?˙i ·?+?e
˙i ??i ?·?+?e i ??˙i ?·?=?˙i ·?i +?e ˙i ??i ?·?=?˙i
·?+?e ˙i ??i ??+???e i ?·?˙i =???i ??i ?ri ?·?i +r i ???e i
??i ?·??/r i =??i 2??ri 2
+r i ?????e i ?·?i ?/r i
?13a ?
Let E 3?3be a unit matrix.By means of Eqs.?9?and ?10?,the ?rst
item in Eq.?13?is derived as follows
?i 2=??+??e i ?·??+??e i ?=???e i ???·???e i ???=???e
?i ??·???e ?i ??=??E 3?3?e ?i ?V ?·??E 3?3?e ?i ?V ?=??E 3?3?e
?i ?V ?T ??E 3?3?e ?i ?V ?=V T ?
E 3?3?e ?i e
?i ?e
?i 2?
V ?13b ?
From Eq.?9?,the second item in Eq.?13a ?is derived as follows
?ri 2=?V T
?
?i
e i ??i
??
???i T ?e i ??i ?T ?V ?
=V
T
?
?i ?i T
?i ?e i ??i ?T ?e i ??i ??i T ?e i ????e i ??i ?T
?
V ?13c ?
From Eq.?9?,the third item in Eq.?13a ?is derived as follows ?????e i ?·?i =???e i ?·??i ???=?e ?i ?·??i ?=?T e ?i ??i
?=V T
?
03?303?3
03?3?e ?i ??i ?3?3
?
V ?13d ?
From Eqs.?13a ?–?13d ?,Eq.?11?is transformed as follows
a ri =J ri A +V T
h ri V ,
h ri =
1
r i
?
i h 11i h 12ˉi h 16i
h 21i h 22ˉi
h 26]
]
]
]i h 61i
h 62ˉ
i
h 66
?
6?6
?14?
where h ri is a 6?6sub-Hessian matrix.Since each of h ri only includes simple algebraic equations without any second-order dif-ferentiation,and a Hessian matrix is simpli?ed obviously.All items in h ri ?i =1,2,...,n ?are derived ?see the Appendix ?.2.6Inverse Velocity/Acceleration.When a parallel manipu-lator has n SPS-type active legs r i ?i =1,2,...,n ?6?and one constrained leg,from Eqs.?10?and ?14?,its general inverse velocity/acceleration v r /a r along r i can be solved as follows
?r =J r V ,a r =J r A +V T H r V
J r =
?
?1T ?e 1??1?T
]
?n T ?e n ??n ?
T ?
n ?6
H r =?h 1
]h n
?,
?r =??r 1
]?rn
?,
a r =
?a r 1]
a rn
?
?15?
where J r is a n ?6Jacobian matrix;and H r is a Hessian matrix with n layers of 6?6submatrices.Since n ?6and J r is not a
square matrix,neither an inverse matrix J r ?1
nor forward velocity/acceleration can be derived.
2.7The Auxiliary Velocity/Acceleration Equations.In or-der to solve the forward velocity/acceleration of parallel manipu-lators with n ?6SPS-type active legs,and one constrained leg,a common 6?6Jacobian matrix and a common Hessian matrix must be created.
Since the constrained wrench ?F p T p ?do not do any work dur-ing the movement of parallel manipulator,there must be
F pj f j ·?+?d j ?F pj f j ?·?=0,?j =1,ˉn 1?
?16?
T pk ?k ·?=0,
?k =1,ˉn 2,n +n 1+n 2=6?
When removing F pj and T k from Eq.?16?,an auxiliary velocity matrix equation is derived as follows
J a V =0,J a =
?f 1T ?d 1?f 1?T
]
]
f n 1T ?d n 1?f n 1?T
01?3?1
T ]
]
01?3
?n 2
T ?
?6?n ??6
?17?
where J a is a ?6-n ??6auxiliary Jacobian matrix.By differentia-tion Eq.?17?with respect to time,an auxiliary acceleration matrix equation is derived as follows,
0=J a A +J ˙a V J ˙a
=?
f ˙1T ?d ˙1?f 1+d 1?f ˙1
?T ]]
f ˙n 1T ?d ˙n 1?f n 1+d n 1?f ˙n 1
?T 01?3?˙1T ]]01?3
?˙n 2
T ?
?6?n ??6
=V T H a
?18?
where H a is an auxiliary Hessian matrix.
2.8The Common Velocity and Acceleration Equations.By combing Eq.?15?with Eqs.?17?and ?18?,respectively,the com-mon inverse velocity and acceleration ?v c a c ?of this type of par-allel manipulators are derived as follows
?c =J V ,a c =J A +V T H V ?c =
??r 0
?
6?1
,
a c =
?a r 0
?
6?1
,
J =
?J r J a
?
6?6
,
H =
?H r H a
?
?19?
where J is a common 6?6Jacobian matrix;and H is a common Hessian matrix with six layers of 6?6submatrices.
From Eqs.?4?and ?19?,we obtain G =J T or J =G T .Thus,J can be used to solve the active forces and constrained wrench of this type of parallel manipulators.From Eq.?19?,the common forward velocity/acceleration of this type of parallel manipulator is derived as follows
V =J ?1
?c ,
A =J ?1?a c ?V T
H V ?
?20?
In Eqs.?14?,?15?,and ?19?,each item in J ,J ?1,H r and its sub-matrix h ri does not include any ?rst-/second-order partial differ-entiation.Therefore,the formulae for solving inverse/forward ve-locity and acceleration of parallel manipulators are obviously simpli?ed.The inverse/forward velocity and acceleration can be solved in the following cases:
When given the forward velocity V and the acceleration A of m ,from Eq.?15?,the inverse velocity v r and acceleration a r can be solved.
When given the common inverse velocity v c and the common acceleration a c ,from Eq.?20?,the forward velocity V and accel-eration A can be solved.When solving A ,a differentiation matrix of auxiliary Jacobian matrix J a must be derived.Based on the
pose of constrained wrench,each differentiation item in J ˙a
can be derived.
3
A 4-SPS/PS Parallel Manipulator
A 4-SPS/PS parallel manipulator is composed of a platform m ,a base
B ,four SPS-type active legs r i ?i =1,2,3,4?with the linear actuators,and one PS-type passive constrained leg r o ?see Fig.2?.In order to avoid singularity,let m be a rectangle link with a long side l 1,a short side l 2,four vertices b i ,and a central point o .Let B be a square with sides L i =L ,four vertices B i ,and a central point O .Each of r i connects m with B by a spherical joint S on m at b i ,a prismatic joint P along r i ,and a spherical joint S on B at B i .r o connects m with B by a prismatic joint P ?xed on m at o ,a spherical joint S attached to B at O ,and there is a structure con-straint of r o ?m .
In the 4-SPS/PS parallel manipulator,the number of links is q 0=11for one platform,four cylinders,four piston rods,and one base;the number of joints is q =14for 5P ,and 9S ;and the redundancy DOF is M 0=4for four SPS-type active legs rotating about their own axes.Thus,the DOF of the 4-SPS/PS parallel manipulator is calculated as follows
M =6?q 0?q ?1?+
?i =1
q
m i ?M
=6??11?14?1?
+?5?1+9?3??4=4
3.1Inverse Kinematics.B i B of B and b i m
of m ?i =1,2,3,4?are derived as follows
B 1B =1
2?L ?L 0
?
,B 2B =1
2?L L 0
?
,B 3
B =12
??L L 0
?
,
B 4B =12??L ?L 0
?
Fig.2A 4-SPS/PS parallel manipulator and its force situation
b 1m =1
2?l 1?l 20
?,b 2m =1
2?l 1l 20
?
,b 3m =12
??l 1l 20
?
,
b 4m =1
2??l 1
?l 20
??21?
From Eqs.?6a ?and ?21?,b i B of m are derived as follows
b 1B =1
2
?x l l 1?y l l 2+2X o
x m l 1?y m l 2+2Y o x n l 1?y n l 2+2Z o ?
,b 2B =1
2
?x l l 1+y l l 2+2X o x m l 1+y m l 2+2Y o x n l 1+y n l 2+2Z o
?b 3
B =1
2
?
?x l l 1+y l l 2+2X o ?x m l 1+y m l 2+2Y o ?x n l 1+y n l 2+2Z o
?
,b 4
B =1
2
?
?x l l 1?y l l 2+2X o
?x m l 1?y m l 2+2Y o ?x n l 1?y n l 2+2Z o
?
?22?
When r o ?m ,there is o B
=r o z .Thus by means of Eq.?6b ?yield
X o /z l =Y o /z m =Z o /z n =r o ,
x l 2=1?y l 2??X o /r o ?2
y m 2=1?x m 2??Y o /r o ?2
?23?
Let R B m be de?ned by three Euler rotations of ?Z ,Y 1,Z 2?,namely,
a rotation of ?about Z axis,followed by a rotation of ?about Y 1axis,and a rotation of ?about Z 2axis,where Y 1is formed by Y rotating about Z by ?,and Z 2is formed by Z 1rotating about Y 1by
?.Thus,R B m and o B
are derived as follows
R m B =?
c ?·c ?·c ??s ?·s ??c ?·c ?·s ??s ?·c ?c ?·s ?
s ?·c ?·c ?+c ?·s ??s ?·c ?·s ?+c ?·c ?s ?·s ??s ?·c ?s ?·s ?c ?
?
,
o B =r o ?c ?·s ?
s ?·s ?
c ?
?
?24?
Comparing each item in R B m and o
B
in Eqs.?6?and ?24?,?x l ,y l ,z l ,x m ,y m ,z m ,x n ,y n ,z n ?and ?X o ,Y o ,Z o ?can be expressed by ??,?,?,r o ?.From Eqs.?6b ?,?7a ?,and ?21?–?24?,r i are derived as follows
r 12=?2L 2
+l 12+l 22?/4+r o 2??c ??c ??s ???l 1c ?+l 2s ????s ?+c ??
??l 1s ??l 2c ??+2r o s ??c ??s ???L /2
r 22=?2L 2
+l 12+l 22?/4+r o 2??c ??c ?+s ???l 1c ??l 2s ????s ??c ??
??l 1s ?+l 2c ??+2r o s ??c ?+s ???L /2r 3
2=?2L 2
+
l 1
2+
l 22?/4+r o
2??c ??c ??s ???l 1c ?+l 2s ????s ?+c ??
??l 1s ??l 2c ???2r o s ??c ??s ???L /2r 4
2=?2L 2
+
l 1
2+
l 22?/4+r o
2??c ??c ?+s ???l 1c ??l 2s ????s ??c ??
??l 1s ?+l 2c ???2r o s ??c ?+s ???L /2
?25?
From Eqs.?8?and ?21?–?25?,?i and e i ?i =1,2,3,4?are derived as
follows
?1=1
2r 1
?
x l l 1?y l l 2+2X o ?L x m l 1?y m l 2+2Y o +L x n l 1?y n l 2+2Z o
??2=
1
2r 2
?
x l l 1+y l l 2+2X o ?L
x m l 1+y m l 2+2Y o ?L x n l 1+y n l 2+2Z o
?
?3=1
2r 3
??x l l 1+y l l 2+2X o +L ?x m l 1+y m l 2+2Y o ?L ?x n l 1+y n l 2+2Z o ??4=1
2r 4
?
?x l l 1?y l l 2+2X o +L ?x m l 1?y m l 2+2Y o +L ?x n l 1?y n l 2+2Z o ?e 1=1
2
?
x l l 1?y l l 2x m l 1?y m l 2x n l 1?y n l 2?
,
e 2=1
2
?x l l 1+y l l 2x m l 1+y m l 2
x n l 1+y n l 2
?e 3=1
2
?
?x l l 1+y l l 2?x m l 1+y m l 2?x n l 1+y n l 2
?
,
e 4=1
2
?
?x l l 1?y l l 2?x m l 1?y m l 2
?x n l 1?y n l 2
?
?26?
From Eqs.?21?–?26?,?i and e i which are expressed by four pose
parameters ??,?,?,r o ?can be derived.
In the PS-type passive constrained leg r o ,a spherical joint S can be replaced by three intersecting revolute joints ?R 1,R 2,R 3?.Thus,an equivalent constrained leg includes three intersecting revolute joints ?R 1,R 2,R 3?and one prismatic joint P .Their unit vectors are determined as follows
R 1=?0
01
?,
R 2=
??s ?c ?0
?,
R 3=?c ?·s ?
s ?·s ?c ?
?
,
P =o B r o
=?c ?·s ?s ?·s ?
c ?
?
?27?
3.2The Common Jacobian/Hessian Matrices.Based on the
geometric constraints of the constrained wrench in Sec.2.2,in the equivalent passive constrained leg,there must be ?F p 1?o B ,F p 2?o B ,and F p 1,and F p 2intersecting or parallel with R 1,R 2,R 3?.Thus,both F p 1and F p 2are exerted on r o at O .By means of Eq.?9?,their unit vectors f 1and f 2and differentiations are deter-mined as follows
f 1=x =?x l x m x n ?T ,f 2=y =?y l y m y n ?T ?28a ?
f ˙1
=x ˙=??x =?x ?,f ˙2
=y ˙=??y =?y ?The vectors ?d 1,d 2?of the distances from o to F p 1and F p 2and
their differentiations are determined as follows d 1=d 2=?o B =?r o ?s ??s ?·c ?c ?·c ??T ,
d ˙1=d ˙2
=???28b ?
From Eqs.?17?,?18?,?28a ?,and ?28b ?,the auxiliary Jacobian/
Hessian matrices are derived as follows
J a =
?
f 1T ?d 1?f 1?T
f 2T ?d 2?f 2?
T ?2?6
=
?
x ?o B ?x y ?o B ?y
?
2?6
J ˙a =
?
f ˙1T ?d ˙1?f 1+d 1?f ˙1?T f ˙2
T ?d ˙2?f 2+d 2?f ˙2?T ?=
?
?x
???x ???o ?B x ??y
???y ???o ?B y ??
=V T
?h a 1h a 2
?
?29?
where h ai ?i =1,2?are two auxiliary sub-Hessian matrices.By
means of Eq.?9?,h ai are derived as follows
h a 1=
?
0?x
?x
??o ?B x ??
6?6
,
h a 2=
?
0?y
?y
??o ?B y ??
6?6
From Eqs.?19?and ?29?,the common inverse velocity v c and
common inverse acceleration a c of the 4-SPS/PS parallel manipu-lator ?are derived as follows
?c =J V ,a c =J A +V T H V
J =G T =
?J r J a
?
=??1T ?e 1??1?T ?2T ?e 2??2?T ?3T ?e 3??3?T ?4
T
?e 4??4?T
f 1
T ?d 1?f 1?T f 2T ?d 2?e 2?
T
?6?6
,H =
?H r H a
?
=
?h r 1
h r 2
h r 3
h r 4
h a 1
h a 2
?
?30?
where J is a common Jacobian matrix and H is a common Hes-sian matrix.
4A 5-SPS/UPU Parallel Manipulator
A 5-SPS/UPU parallel manipulator is composed of a platform
m ,a base B ,?ve SPS-type active legs r i ?i =1,2,...,5?with the linear actuators,and one UPU-type passive constrained leg r o ?see Fig.3?.In order to avoid singularity,let m be a pentangle with ?ve different sides l i ,?ve vertices b i ,and a center point o ;let the distance from b i to o be e i =e ;let b 2and b 4lie in the x axis and b 3in the y axis;let the angle between e 1and y be 2?,and the same for the angle between e 5and y .Let B be an equilateral pentangle with ?ve sides L i =L ,?ve vertices B i ,and a center point O ;let the distance from A i to O be E i =E ;let B 3lie in Y ;let the angle between E 1and Y be 2?and the same for the angle between E 5and Y ;and let the angle between E 2and X be ?and the same for the angle between E 4and X .Each of r i connects m with B by a sphere joint S on m at b i ,a prismatic joint P ,and a sphere joint S on B at B i .The UPU-type passive leg r o connects m with B by a universal joint U m on m at o ,a P along r o ,and a universal joint U B on B at O .U B can be replaced by two cross revolute joints R B 1and R B 2.U m can be replaced by two cross revolute joints R m 1and R m 2.In addition,there are some structure constraints of ?R B 1?R B 2,R m 1?R m 2,with R B 1being coincident with X ,R m 1being coincident with z ,R B 2?R m 2,R m 2?r o ,and R B 2?r o ?.From these structure constraints,it can be veri?ed that z intersects with the X axis at point c ?i.e.,X ,r o ,and z lie in a plane ?Ooc ?.
In the 5-SPS/UPU parallel manipulator,the number of links is q 0=14for one platform,six cylinders,six piston rods,and one base;the number of joints is q =18for 6P ,2U ,and 10S ;and the redundancy DOFs is M 0=5for ?ve SPS-type active legs rotating about their own axes.Thus,the DOF of the 5-SPS/UPU parallel manipulator is M =6?q 0?q ?1?+
?i =1
q
m i ?M
=6??14?18?1?+?6?1+2
?2+10?3??5=5
4.1Inverse Kinematics.B i B of B and b i m
of m ?i =1,...,5?are derived as follows
B 1
B =E ?s 2?
?c 2?0
?,
B 2
B =E ?c ?
s ?0
?,
B 3
B =?0
E
?
B 4B =E ??c ?
s ?
?,
B 5B =E ??s 2?
?c 2?
??31?
b 1m =e ?s 2?
?c 2?0
?,
b 2m =?e
00?,
b 3m =?0
e 0
?,
b 4m =
??e 00
?b 5
m =e ??s 2?
?c 2?0
?
,
?=18deg
From Eqs.?6a ?and ?31?,b i B of m ?i =1,2,...,5?are derived as follows
b 1B =?
x l es 2??y l ec 2?+X o
x m es 2??y m ec 2?+Y o x n es 2??y n ec 2?+Z o
?,
b 2B =?x l e +X o
x m e +Y o
x n e +Z o
?b 3
B =?ey l +X o
ey m +Y o
ey n +Z o
??32?
b 4B =?
?x l e +X o
?x m e +Y o ?x n e +Z o
?,
b 5B =??x l es 2??y l e
c 2?+X o
?x m es 2??y m ec 2?+Y o
?x n es 2??y n ec 2?+Z o
?
Since vectors ?o B ,z ,X ?lie in a plane ?Ooc ,there must be a con-strained equation as follows
?
X o Y o Z o
z l z m z n 100
?
=0,i.e.,Y o =
z m Z o z n
?33?
Let R m
B
of the 5-SPS/UPU parallel manipulator be the same as that of the 4-SPS/PS parallel manipulator.From Eqs.?24?and ?33?,o B is derived as follows
o B =?X o Z o s ?·tan ?Z o ?T
?34?
From Eqs.?6b ?,?7a ?,and ?31?–?34?,r i are
derived
Fig.3A 5-SPS/UPU parallel manipulator and its force
situation
r 12=?x l es 2??y l ec 2?+X o ?Es 2??2
+?x m es 2??y m ec 2?
+Z o s ?·tan ?+Ec 2??2+?x n es 2??y n ec 2?+Z o ?2
r 22=?x l e +X o ?Ec ??2+?x m e +Z o s ?·tan ??Es ??2+?x n e +Z o ?
2r 32=?ey l +X o ?2+?ey m +Z o s ?·tan ??E ?2+?ey n +Z o ?2
r 42=??x l e +X o +Ec ??2+??x m e +Z o s ?·tan ??Es ??
2+??x n e +Z o ?2
r 52=??x l es 2??y l ec 2?+X o +Es 2??2
+??x m es 2??y m ec 2?
+Z o s ?·tan ?+Ec 2??2+??x n es 2??y n ec 2?+Z o ?2?35?
From Eqs.?8?and ?31?–?35?,?i and e i ?i =1,...,5?are derived as follows
?1=1
r 1
?x l es 2??y l ec 2?+X o ?Es 2?
x m es 2??y m ec 2?+Z o s ?·tan ?+Ec 2?x n es 2??y n ec 2?+Z o
??5=
1
r 5
?
?x l es 2??y l ec 2?+X o +Es 2?
?x m es 2??y m ec 2?+Z o s ?·tan ?+Ec 2??x n es 2??y n ec 2?+Z o
?
?2=1
r 2
?x l e +X o ?Ec ?
x m e +Z o s ?·tan ??Es ?x n e +Z o
??3=
1
r 3
?
ey l +X o
ey m +Z o s ?·tan ??E ey n +Z o
?
?36?
?4=1
r 4
??x l e +X o +Ec ?
?x m e +Z o s ?·tan ??Es ??x n e +Z o
?,e 1=e ?x l s 2??y l c 2?
x m s 2??y m c 2?
x n s 2??y n c 2?
?e 2=e ?x l
x m x n ?,
e 3=e ?y l
y m y n ?,
e 4=?e ?x l
x m
x n
?e 5=?e ?x l s 2?+y l c 2?
x m s 2?+y m c 2?
x n s 2?+y n c 2?
?
The UPU-type constrained leg r o includes four revolute joints
?R B 1,R B 2,R m 1,R m 2?and one prismatic joint P .Based on their structure constraints,their unit vectors in ?B ?are derived as fol-lows
R B 1=?1
00
?
,
R m 1=?z l z m
z n
?
R B 2=
1
??s ?·tan ??2+1
?
00
?s ?·tan ?
?
?37?
P =o B
r o =1?X o 2+Z o 2?s ?·tan ??2+Z o 2?
X o
Z o s ?·tan ?Z o
?
4.2The Common Jacobian/Hessian Matrices.In the UPU-type constraint leg r o ,a constraint force F p is applied on r o .Based
on the geometric constraints of constraint force/torque in Sec.2.2,F p must be perpendicular to P ,and must intersect or be parallel with ?R B 1,R B 2,R m 1,R m 2?.Based on the geometric constraints of ?R B 2?R m 2,R B 2?r o ,i.e.,R B 2?P ,R B 2intersecting with R B 1at O ,and R B 2intersecting with R m 1at c ?,it is veri?ed that the unit vector f of F p is the same as R B 2
f =R B 2=?01?s ?·tan ??T /??s ?·tan ??2+1
?38a ?
F p is exerted on X at point c .A line equation from o to c is
obtained as follows
?x ?X o ?/z l =?y ?Y o ?/z m =?z ?Z o ?/z n
?38b ?
When z =y =0,from Eq.?38?,we obtain x =X c =X o -Z o z l /z n .Thus,a vector c of point c in ?B ?becomes
c =?X c Y c Z c ?T =?X o ?Z o c ?·tan ?00?T
?38c ?
A vector d of the distance from o to F p in ?
B ?is
d =c ?o B =?Z o ?c ?·tan ?,s ?·tan ?,1?T
?38d ?Let q
˙=??˙?˙?˙?T be of a rotational angular velocity speed of three Euler angles ??,?,??of ?ZYZ ?;and ?be of a rotational angular velocity speed of platform.They have the following relevant equations ?1,2?.
?=J q q
˙,q ˙=J q ?1?
J q =?
0?s ?c ?·s ?
c ?s ?·s ?1
c ?
?,J q
?1=
?
?c ?·cot ??s ?·cot ?1?s ?c ?0c ?·csc ?
s ?·csc ?
?
?39?
By means of Eqs.?38a ?and ?39?,a differentiation of f with re-spect to time is derived as below
f ˙=J f
?J f =
?
0?
s ?·tan 2?·c ??1+s 2?·tan 2??3/2
?
s 2?·tan ?·sec 2??1+s 2?·tan 2??3/2
?
csc 2?·cot ?·cot 2?
?1+csc 2?·cot 2??3/2?csc 2?·cot ?·csc 2??1+csc 2?·cot 2??3/2
0?
J q
?1?40?
By means of Eqs.?38d ?and ?39?,a differentiation of d with re-spect to time is derived as below
d ˙=J d 1?+J d 2
?J d 1=?
000
00000?1
?
,
?41?
J d 2=?
Z o s ?·tan ??Z o c ?·sec 2??c ?·tan ?
?Z o c ?·tan ??Z o s ?·sec 2??s ?·tan ?00?1?
J q
?1By means of Eqs.?9?and ?39?–?41?,a differentiation of J a with
respect to time and an auxiliary Hessian matrix H a is derived as follows
J ˙a =?f ˙T ?f ˙?d +f ?d ˙?T ?=V T H a
,H a =
?
?f ?J d 1
?T J f T ?f ?J d 2?d ?J f ?
T ?
?42?
From Eqs.?17?,?18?,and ?42?,v c ,a c ,J ,and H for the 5-SPS/UPU parallel manipulator are derived as follows
?c =J V ,
a c =J A +V T H V
J =??1T ?e 1??1?T ?2T ?e 2??2?T
?3
T ?e 3??3?T ?4T
?e 4??4?T ?5
T ?e 5??5?T f T
?d ?f ?T
?6?6
,H =
?H r H a
?
=
?h r 1
h r 2
h r 3
h r 4
h r 5
H a
?
?43?
5Examples
In 4-SPS/PS parallel manipulator,let E =50,e 1=50,and e 2=20cm.By using relevant equations and MATLAB ,when varying four independent pose parameters ??,?,?,r o ?versus time t ,the inverse extension r i ,the velocity v ri ,and acceleration a ri of active legs are solved ?see Figs.4?a ?–4?d ??.The forward velocity V and the forward acceleration A of platform m are solved ?see Figs.4?e ?–4?h ??.
6Conclusions
Corresponding to the parallel manipulators with n SPS-type active legs and one passive constrained leg in various possible serial structures,a common 6?6Jacobian matrix without the ?rst-order partial differentiation and a common 6?6Hessian ma-trix without the second-order partial differentiation are derived for solving inverse/forward velocity and acceleration of these type of parallel manipulators.The equations of inverse/forward velocity and acceleration are uni?ed and simple for these types of parallel manipulators.
The common Jacobian matrix is a transposition of active/constraint force matrix,and can be used to solve the active/constraint forces of these types of parallel manipulators.
The common Jacobian matrix is composed of a n ?6Jacobian matrix and a ?n ?1??6auxiliary Jacobian matrix which only in-cludes the pose vectors of constraint forces/torques.
The common Hessian matrix is composed of two matrices.One is a n ?6product matrix of the general velocity matrix and the Hessian matrix with n layers of 6?6sub-Hessian matrices which only includes simple algebraic equations.The other is a ?n ?1??6differentiation matrix of the auxiliary Jacobian matrix which may be transformed into a simple algebraic matrix.
Acknowledgment
The authors would like to acknowledge the ?nancial support of the Natural Sciences Foundation Council of China ?NSFC ?with Grant No.50575198
Nomenclature
B ?the base M ?platform
r i ,v ri ,a ri ?length,velocity,and acceleration of the ith
active leg
l i ,L i ?sides of m and B
P ,S ,R ,U ,C ?prismatic,spherical,revolute,universal,cylin-der joints
o ,O ?center points of m and B b i ?joint point of m B i ?joint point of B
e i ?distance from a i to o for m E i ?distance from A i to O for B
r o ?the passive constrained leg and its length
X o ,Y o ,Z o ?position components of o on m in ?B ?
v ,??velocity and rotation speed of m at o
v x v y v z ?x ?y ?Z ?components of v and ?
a ,??acceleration and rotation acceleration of m at o
a x a y a z ?x ?y ?Z ?components of a and ?
v c ,a c ?common input velocity and acceleration ?B ??coordinate O -XYZ ?xed on B ?m ??coordinate o -xyz ?xed on m
F ,T ?central force and torque exerted on m at o F ai ?active forces exerted on r i ?i =1,...,n ?
F pj ?constrained forces exerted on r o ?j =1,...,n 1?T pk ?constrained torque exerted on r o ?k =1,...n 2??j ,f j ,?k ?unit vectors of F ai ,F pj ,and T pk ,respectively
d j ?vector of from o to F pj
x l ,x m ,x n ?direction cosine between x and X ,x and Y ,x
and Z
y l ,y m ,y n ?direction cosine between y and X ,y and Y ,y
and Z
z l ,z m ,z n ?direction cosine between z and X ,z and Y ,z
and Z
?,?,??Euler angles of m in ?B ?
J r ,J a ,J ?Jacobian,auxiliary Jacobian,common Jacobian
matrices
H r ,H a ,H ??Hessian,auxiliary Hessian,common Hessian
matrices
E 3?3?the 3?3unit matrix
?,??parallel and perpendicular constraint
SPS ?spherical joint-prismatic joint-spherical joint RPS ?revolute joint-prismatic joint-spherical joint UPU ?universal joint-prismatic joint-universal
joint
Fig.4The independent pose parameters …?,?,?,r o …of m ,the extensions of r i ,inverse/forward,velocity,and acceleration for the 4-SPS/PS parallel manipulator
PU?prismatic joint-universal joint
PS?prismatic joint-spherical joint
Appendix
All items in h ri?i=1,2,...,n?are derived as follows
i h
11
=1??ix2,i h12=i h21=??ix?iy,i h13=i h31=??ix?iz
i h
14
=i h41=??ix?e iy?iz?e iz?iy?,i h15=i h51=e iz??ix?e iz?ix
?e ix?iz?
i h
16
=i h61=?e iy??ix?e ix?iy?e iy?ix?,i h22=1??iy2
i h
23
=i h32=??iz?iy,i h24=i h42=?e iz??iy?e iy?iz?e iz?iy?
i h
25
=i h52=??iy?e iz?ix?e ix?iz?,i h26=i h62=e ix??iy?e ix?iy
?e iy?ix?
i h
33
=1??iz2,i h34=i h43=e iy??iz?e iy?iz?e iz?iy?,
i h
35
=i h53=?e ix??iz?e iz?ix?e ix?iz?,i h36=i h63=??iz?e ix?iy
?e iy?ix?
i h
44
=e iz2+e iy2??e iy?iz?e iz?iy?2?r i?e iy?iy+e iz?iz?
i h
45
=i h54=?e ix e iy??e iy?iz?e iz?iy??e iz?ix?e ix?iz?+r i e ix?iy
i h
46
=?e ix e iz??e iy?iz?e iz?iy??e ix?iy?e iy?ix?+r i e ix?iz
i h
55
=e ix2+e iz2??e iz?ix?e ix?iz?2?r i?e ix?ix+e iz?iz?
i h
56
=?e iy e iz??e iz?ix?e ix?iz??e ix?iy?e iy?ix?+r i e iy?iz
i h
64
=?e ix e iz??e iy?iz?e iz?iy??e ix?iy?e iy?ix?+r i e iz?ix
i h
65
=?e iy e iz??e iz?ix?e ix?iz??e ix?iy?e iy?ix?+r i e iz?iy
i h
66
=e ix2+e iy2??e ix?iy?e iy?ix?2?r i?e ix?ix+e iy?iy?
References
?1?Saeed,B.N.,2004,Introduction to Robotics Analysis,Systems,Applications, Pearson Education,Inc.,Prentice Hall,and Publishing House of Electronics Industry,Beijing,China.
?2?Huang,Z.,Zhao,Y.S.,and Zhao,T.S.,2006,Advanced Spatial Mechanism, Advanced Education Press,Beijing,China.
?3?Zhang,D.and Gosselin,C.M.,2001,“Kinetostattic Modelling of N-Dof Par-allel Mechanisms with Passive Constraining Leg and Prismatic Actuators,”
ASME J.Mech.Des.,123?3?,pp.375–381.
?4?Zhang,D.and Gosselin,C.M.,2002,“Kinetostatic Modelling of Parallel Mechanisms with a Passive Constraining Leg and Revolute Actuators,”Mech.
Mach.Theory,37?6?,pp.599–617.
?5?Gürsel,A.and Bijan,S.,2004,“Topology Optimization and Singularity Analy-sis of a3-SPS Parallel Manipulator with a Passive Constraining Spherical Joint,”Mech.Mach.Theory,39?2?,pp.215–235.
?6?Li,M.,Huang,T.,Mei,J.,Zhao,X.,Chetwynd,D.G.,and Hu,S.J.,2005,“Dynamic Formulation and Performance Comparison of the3-DOF Modules of Two Recon?gurable PKM—The Tricept and the Trivariant,”ASME J.
Mech.Des.,127?5?,pp.1129–1136.
?7?Thomas,M.,and Tesar,D.,1982,“Dynamic Modeling of Serial Manipulator Arms,”J.Dyn.Syst.,Meas.,Control,104?9?,pp.218–227.
?8?Freeman,R.A.,and Tesar,D.,1982,“The Generalized Coordinate Selection for the Dynamics of Complex Planar Mechanical System,”ASME J.Mech.
Des.,104,pp.207–217.
?9?Mohamed,M.G.,and Duffy,J.,1985,“A Direct Determination of the Instan-taneous Kinematics of Fully-Parallel Robot Manipulators,”ASME J.Mech., Transm.,Autom.Des.,107,pp.226–229.
?10?Rico,J.M.,Gallardo,J.,and Duffy,J.,1999,“Screw Theory and Higher Order Kinematic Analysis of Open Serial and Closed Chains,”Mech.Mach.Theory, 34?4?,pp.559–586.
?11?Joshi,S.A.,and Tsai,L.W.,2002,“Jacobian Analysis of Limited-DOF Par-allel Manipulators,”ASME J.Mech.Des.,124?2?,254–258.
?12?Kim,S.G.,and Ryu,J.,2003,“New Dimensionally Homogeneous Jacobian Matrix Formulation by Three End-Effector Points for Optimal Design of Par-allel Manipulators,”IEEE Trans.Rob.Autom.,19?4?,pp.731–737.
?13?Fang,Y.,and Huang,Z.,1997,“Kinematics of a Three-Degree-of-Freedom In-Parallel Actuated Manipulator Mechanism,”Mech.Mach.Theory,32?7?, pp.789–796.
?14?Can?eld,S.L.,Soper,R.R.,and Reinholtz,C.F.,1999,“Velocity Analysis of Parallel Manipulators by Truss Transformations,”Mech.Mach.Theory,34?3?, pp.345–357
?15?Lu,Y.,2006,“Using CAD Variation Geometry for Solving Velocity and Ac-celeration of Parallel Manipulators with3–5Linear Driving Limbs,”ASME J.
Mech.Des.,128?4?,pp.738–746.
?16?Lu,Y.,2006,“CAD Variation Geometry and Analytic Approach for Solving Kinematics of a Novel3-SPU/3-SPU Parallel Manipulator,”ASME J.Mech.
Des.,128?3?,pp.574–580.
?17?Lu,Y.and Hu,B.,2006,“Solving Jacobian Matrix of Parallel Manipulators with Linear Driving Limbs by Using Cad Variation Geometric Approach,”
Proceedings of IDETC/CIE2006,Philadelphia,PA,September10–13.
?18?Gallardo-Alvarado,J.,Rico-Martínez,J.M.,and Gürsel,A.,2006,“Kinemat-ics and Singularity Analyses of a4-DOF Parallel Manipulator Using Screw Theory,”Mech.Mach.Theory,41?9?,pp.1048–1061.
?19?Tsai,L.W.,2000,“Solving the Inverse Dynamics of a Stewart-Gough Ma-nipulator by the Principle of Virtual Work,”ASME J.Mech.Des.,122?1?,pp.
3–9.
?20?Pond,G.,and Carretero,J.A.,2006,“Formulating Jacobian Matrices for the Dexterity Analysis of Parallel Manipulators,”Mech.Mach.Theory,41?12?, pp.1505–1519.
?21?Altuzarra,O.,Salgado,O.,Petuya,V.,and Hernández,A.,2006,“Point-Based Jacobian Formulation for Computational Kinematics of Manipulators,”Mech.
Mach.Theory,41?12?,pp.1407–1423.