patran-MPC多点约束
6.MPC—多点约束
1.1 MPC定义
MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
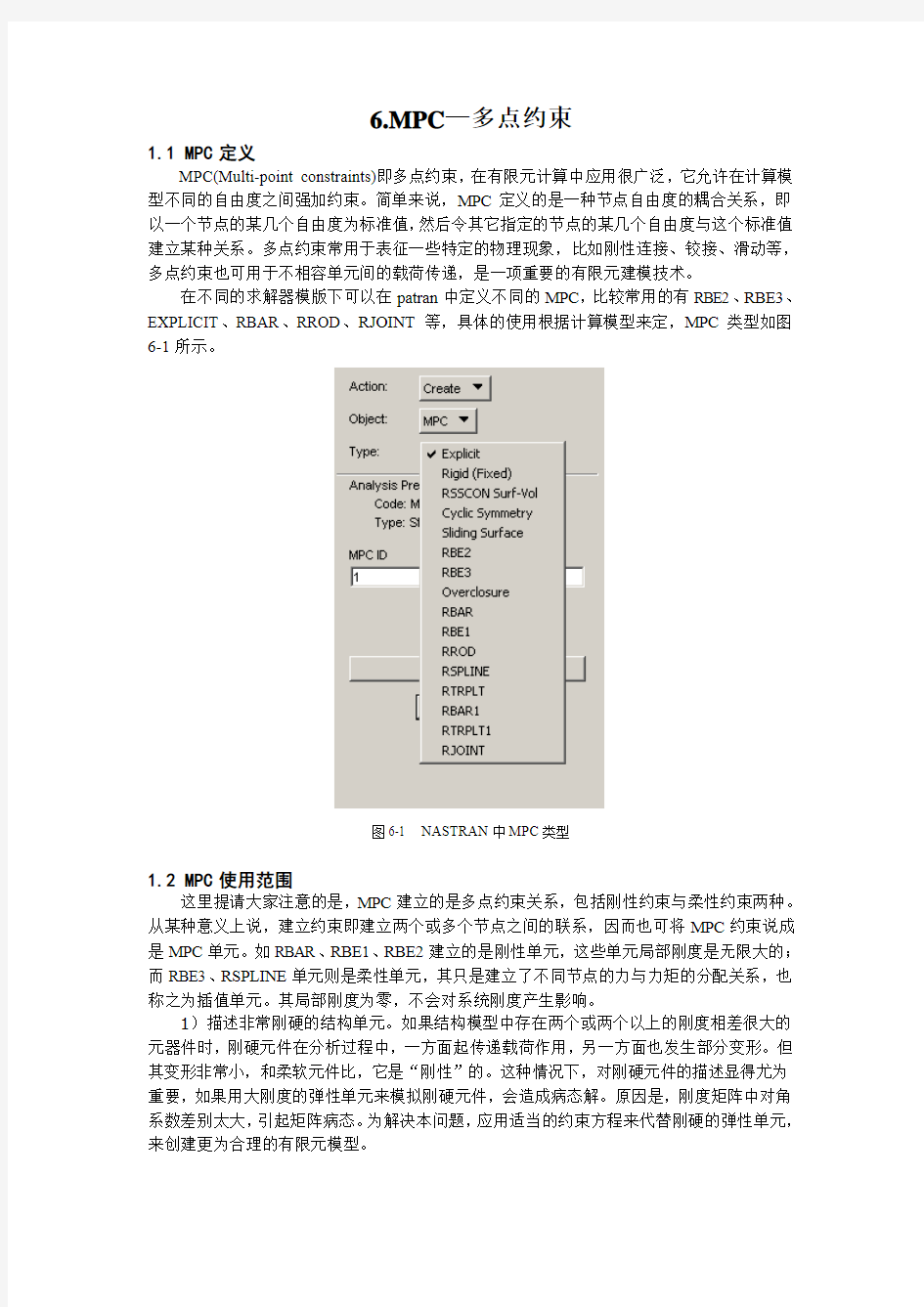
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型
1.2 MPC使用范围
这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。但其变形非常小,和柔软元件比,它是“刚性”的。这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。如在有限元模型中,包含三维实体单元和壳体单元。模型看来成功,没什么问题。但是求解是,会出现“刚度矩阵奇异”的错误。原因是,实体单元和壳体单元是不相容单元,实体单元节点有三个自由度(移动),而壳体单元节点却有五个自由度(三个移动,两个转动)。若不采取特殊处理,则无法将壳体单元上的力偶传递到实体单元上。为了消除这种奇异性,必须建立一种连接,作用是在实体中建立一个耦合,以承受壳体力偶。
3)任意方向的约束。当某节点可以沿着不平行于坐标轴的某个边界运动时,就需要定义一个约束方程,这个方程反映垂直于此边界的运动的约束。
4)刚性连杆。
1.3 MPC定义的数学基础
(1)小位移理论
(2)MPC对系统刚度、质量、载荷等的影响
1.4 MPC分类
MSC.Nastran中常用的MPC类型有如下几种。
◆Explicit 用于定义某节点的位移与其他若干节点的位移的函数关系,该函数是一个
一次多项式,具体方程如下所示:
U0 = C1U1 + C2U2 + C3U3 + ... + CnUn + C0
式中,U0为从自由度,Ui为主自由度,Ci是权系数,C0为常数项。
◆Rigid(fixed)固定的多点约束。其将若干个依赖节点与某个独立节点相互固定,从
而使依赖节点的所有自由度与独立节点保持一致,包括位移也保持一致。这种多点
约束在用曲面模拟板状实体时,可以连接不同的平面,从而可以使不同的曲面连接
起来。
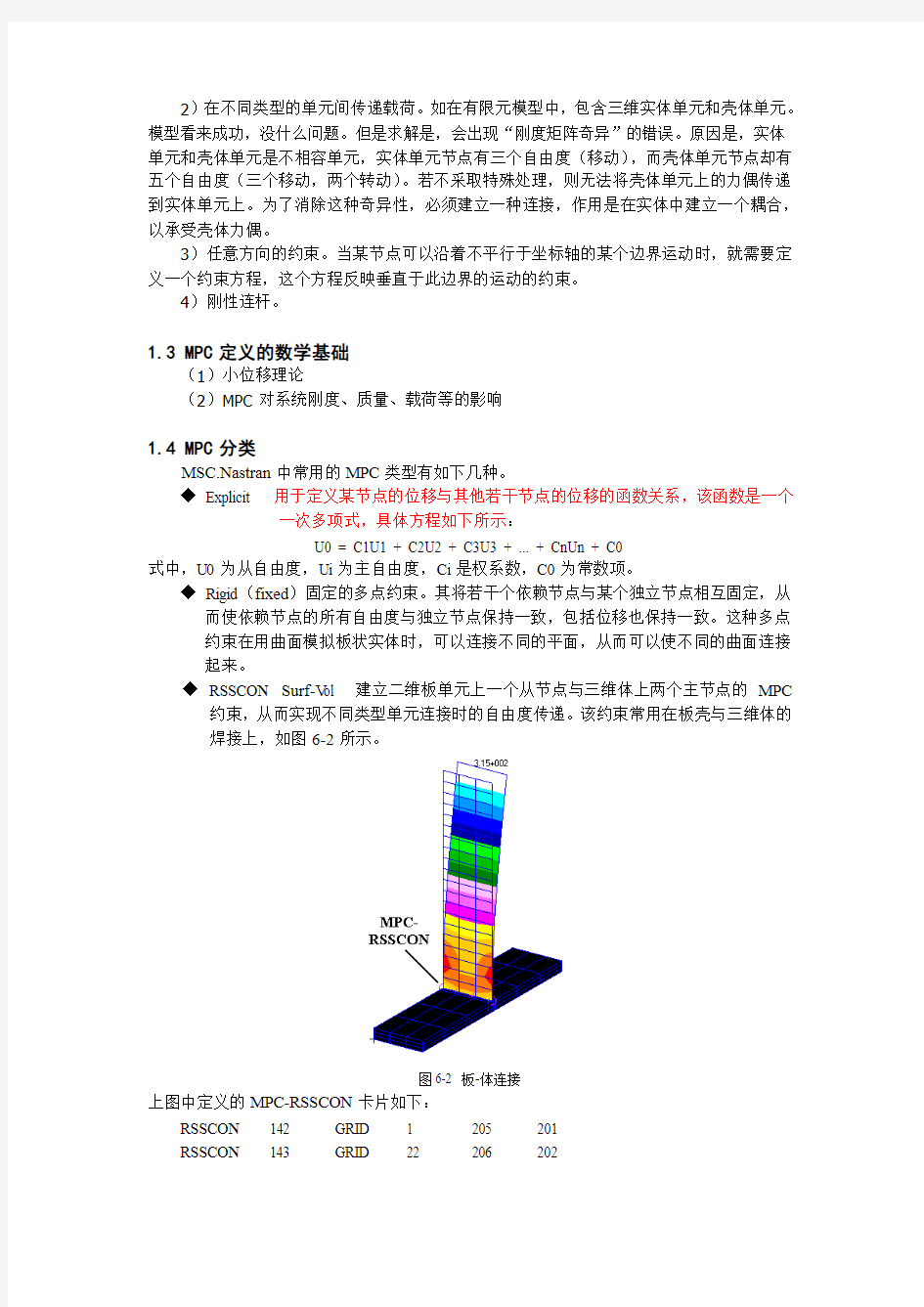
◆RSSCON Surf-V ol 建立二维板单元上一个从节点与三维体上两个主节点的MPC
约束,从而实现不同类型单元连接时的自由度传递。该约束常用在板壳与三维体的
焊接上,如图6-2所示。
图6-2 板-体连接
上图中定义的MPC-RSSCON卡片如下:
RSSCON 142 GRID 1 205 201
RSSCON 143 GRID 22 206 202
RSSCON 144 GRID 43 207 203
RSSCON 145 GRID 64 208 204
式中,1为板壳单元边上的节点,205、201为对应与节点1的三维体单元上节点,依次类推。另外,板-体连接也可用RBE3单元来实现。
◆Cyclic Symmetry 在两个不同的区域之间,建立一组柱面对称的多点约束边界条件
(轴对称的多点约束边界条件)。从patran的相应界面中可见,需要选择一个柱坐
标系,该坐标系的Z轴作为对称轴,在“Dependent Region”和"Independent Region"
文本框中,输入依赖节点和独立节点,依赖节点和独立节点必须成对出现,而且,
各节点对的角度差应该相等。
◆Sliding Surface 在两个相一致的区域的节点之间,定义一个滑动曲面。对应节点间
的移动自由度(即垂直于该曲面方向)被约束,但其他方向上保持自由。
◆RBE1
◆RBE2 刚性单元,作为一个十分简便的工具,其可将相同的几个在刚性连接在
一起。
式中
EID MPC编号,系统自动产生
GN 主节点号
CM 从节点自由度
GMi 从节点号
注意:(1)使用RBE2单元时,只能指定一个主节点,且主节点的六个自由度被用来参与对从节点的载荷分配或约束。
(2)RBE2单元与RBE1单元的区别是,RBE2的Independent只需定义节点,而不必指定自由度,因为他包含节点的6个自由度;但RBE1的Independent需要指定节
点自由度。
RBE2单元的使用范围:
(1)焊接:
(2)扭矩施加
(3)薄壁圆筒自由膨胀
◆RBE3 柔性单元,RBE3单元在分配载荷(力和力矩)方面是一个强有力的工具。
与RBER和RBE1单元不同的是,其在计算中不会增加系统的刚度。力和力矩在
RBE3单元的作用下,通过相应的权值,被从节点分配到一序列主节点上,且RBE3
的Independent自由度最好不要有旋转自由度。在实际应用中,RBE3单元没有RBE2
单元应用得广泛,原因是分配权值不好确定。
RBE3单元工作原理如下:
(1)将参考节点载荷(力与力矩)等效移至主节点围成面域的中心节点CG,生成新的力与力矩
A CG F F =
e A A CG *F M M +=
(2)将CG 节点的力与力矩按照相应的权值,分配到各主节点上
各主节点获得的力,???
?
?
?*=∑
i i CG
if ωωF F 加上由力矩CG M 产生的力im F ,???
? ??++=2
3322221
1F r r r r M i
i CG im ωωωω RBE3单元的定义卡片如下所示: 式中
EID MPC 编号,系统自动产生 REFGRID 参考节点(从节点)号 REFC 参考节点自由度
WTi 参考节点与主节点之间自由度的连接权值 Ci 主节点的自由度
Gi,j 对自由度Ci 的主节点号
“UM ” 防止系统产生刚体位移等的设置 GMi 防止刚体位移设置的节点
CMi 防止刚体位移设置的节点自由度
Reference Grid
CG
F CG
M CG
CG
M CG
F 1m
F 3m
F 2m
RBE3单元应用范围:弯矩施加、不同类型单元之间的连接(如梁-板连接、梁-体连接、板-体连接等)
◆RBAR 刚性梁单元,两节点之间的刚性连接(注意只限两节点间),即两节点间
6个自由度保持一致。
RBAR单元的定义卡片如下所示:
式中
EID MPC编号,系统自动产生
GA、GB 定义RBAR单元的两节点号
CAN、CNB 全局坐标系下,两节点GA、GB的主自由度
CMA、CMB 全局坐标系下,两节点GA、GB的从自由度
注意:(1)定义RBAR单元时两节点的主自由度必须将该单元约束死,不能有任何刚体位移
(2)调整两节点中的某个自由度,可将“焊接”约束变成“铰接”约束,下图所示的RBAR单元B节点处连接方式为铰接。
RBAR单元使用范围:焊接、铰接
◆RBAR1
◆RROD 刚性杆单元
◆RSPLINE 内插约束单元,用于
◆RTRPLT 刚性三角板单元
◆RTRPLT1
◆RJOINT 刚性铰连接单元,铰的每个端点有6个自由度;
(整理中……)
约束最优化问题
约束最优化问题 一实习目的 1.熟练掌握科学与工程计算中常用的基本算法; 2.掌握分析问题,设计算法的能力; 3.掌握模块化程序设计的基本思想,注重模块的“高内聚,低耦合”; 4.采用自顶向下,逐步细化的编程思想完成程序书写; 5.牢固建立“清晰第一,效率第二”的软件设计观念; 6.掌握软件调试,测试的基本技能和方法; 7.提高科技报告的书写质量; 8.在掌握无约束最优化问题求解方法的前提下,对一般情形下的约束最优化问题进行研究,通过实习掌握外点罚函数法、内点罚函数法、乘子法、线性近似规划法和序列二次规划法在求解一般情形下的约束最优化问题的应用。 二问题定义及题目分析 问题1: 要求用外点罚函数法和内点罚函数法解决约束问题: Min f(x)=错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 问题2: 要求用乘子法解决约束问题: Min 错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 (错误!未找到引用源。) 问题3: 要求用线性近似规划法和序列二次规划法解决约束问题: Min 错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 三程序概要设计 1.外点罚函数法 Step1. 给定初始点错误!未找到引用源。,罚参数序列{错误!未找到引用源。}(常取错误!未找到引用源。),精度错误!未找到引用源。,并令k=0;
Step2. 构造增广目标函数错误!未找到引用源。; Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则:惩罚项充分小,或等价地错误!未找到引用源。近似可行)若错误!未找到引用源。,或者错误!未找到引用源。,错误! 未找到引用源。,则得解错误!未找到引用源。,否则令k=k+1,转 Step2. 2.内点罚函数法: Step1. 给定初始可行解错误!未找到引用源。,罚参数序列{错误!未找到引用源。}(常取错误!未找到引用源。),精度错误!未找到引用源。,并令 k=0; Step2. 构造增广目标函数错误!未找到引用源。; Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则)若错误!未找到引用源。,则得解错误!未找到引用源。,否则令k=k+1,转 Step2. 3.乘子法: Step1. 给定初始点错误!未找到引用源。,初始lagrange乘子错误!未找到引用源。,i错误!未找到引用源。罚参数序列{错误!未找到引用源。}, 精度错误!未找到引用源。,并令k=0; Step2. 构造增广目标函数错误!未找到引用源。 Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则)若错误!未找到引用源。,则得解错误!未找到引用源。,否则令 K=k+1,转Step2. 4.线性近似规划法: Step1. 给定初始点错误!未找到引用源。,步长限制错误!未找到引用源。,缩小系数错误!未找到引用源。。精度错误!未找到引用源。,并令k=0;Step2. 求解线性规划问题:min 错误!未找到引用源。
无约束优化方法程序
无约束优化方法---鲍威尔方法 本实验用鲍威尔方法求函数f(x)=(x1-5)2+(x2-6)2 的最优解。 一、简述鲍威尔法的基本原理 从任选的初始点x⑴o出发,先按坐标轮换法的搜索方向依次沿e1.e2.e3进行一维搜索,得各自方向的一维极小点x⑴ x⑵ x⑶.连接初始点xo⑴和最末一个一维极小点x3⑴,产生一个新的矢量 S1=x3⑴-xo⑴ 再沿此方向作一维搜索,得该方向上的一维极小点x⑴. 从xo⑴出发知道获得x⑴点的搜索过程称为一环。S1是该环中产生的一个新方向,称为新生方向。 接着,以第一环迭代的终点x⑴作为第二环迭代的起点xo⑵,即 Xo⑵←x⑴ 弃去第一环方向组中的第一个方向e1,将第一环新生方向S1补在最后,构成第二环的基本搜索方向组e2,e3,S1,依次沿这些方向求得一维极小点x1⑵,x2⑵,x3⑵.连接 Xo⑵与x3⑵,又得第二环的新生方向 S2=x3⑵-xo⑵ 沿S2作一维搜索所得的极小点x⑵即为第二环的最终迭代点 二、鲍威尔法的程序 #include "stdafx.h" /* 文件包含*/ #include
#include
惯性约束聚变能源与激光驱动器讲解
第 18卷第 67期大自然探索 V o l . 18, Sum N o . 67 1999年 第 1期 EXPLO RA T I ON O F NA TU R E N o . 1, 1999惯性约束聚变能源与激光驱动器Ξ 中国工程院院士 中国科学院上海光学精密机械研究所研究员 国家高技术 863— 416主题专家组成员 范滇元 中国科学院院士 北京应用物理与计算数学研究所研员 国家高技术 863— 416 聚变能源是一种“干净的” 的能源。研究进展表明 , 80年代末 , 美国用 变 , 证实了这一技术路线在科学上的可行性。 90年代以来 , 一些国家制定了庞大的发展计划 , 以“点火” 为目标 , 建造百万焦耳级的巨型激光装置。同时 , 并行地开始了用于聚变能电站的驱动器研究。我国已有 30多年研究基础 , 现已制定跨世纪的“神光 - ” 计划 , 将在下世纪初建成 10万 J 级的激光装置 , 开展相关基础物理研究。 1聚变能源是地球上的人造小太阳
能源是人类赖以生存的基本条件。据估计 , 到下世纪中叶前后 , 全世界能源消费的需求将超过传统能源的供给能力 , 必须开发新的能源以弥补其短缺。聚变能源是新能源的重要候选者之一。 氢的同位素氘和氚在高温下聚合成氦核 “聚变” 。太阳的巨 , 而氢弹的爆炸则是地球上人为的聚变反应。氘和锂 (可产生氚在海中蕴藏量极其丰富 , 120kg 海水可产生相当 30L 石油放出能量的聚变能 , 聚变材料可谓“取之不尽” 。如果能在人工可控条件下实现聚变反应 , 则可以提供几乎用之不竭的能源。和传统能源相比 , 聚变燃料具有最高的比能。 然而聚变反应所要求的条件却极为苛刻。自持反应要有 1亿 k W h 左右的高温 , 并且参与反应的粒子密度 n 要足够高 , 能维持一定的反应时间Σ, 即n Σ值要达到 1014s c m 3以上 , 这就是著名的劳逊判据。 为了实现上述条件 , 目前有两条技术途径 :磁约束聚变 (M CF 和惯性约束聚变 (I CF 。 惯性约束聚变的基本思想是 :利用激光或离子束作为驱动源 , 脉冲式地提供高强度能量 , 均匀地作用于装填氘氚燃料的微型球状靶丸外壳表面形成高温高压等离子体 , 利 ? 1 3? Ξ谨以此文缅怀惯性约束聚变研究先驱王淦昌院士 用反冲压力 , 使靶的外壳极快向心运动 , 压缩氘氚主燃料层到每立方厘米几百克质量的极高密度 , 并使局部氘氚区域形成高温高密度热斑 , 达到点火条件 ; 驱动
常用无约束最优化方法(一)
项目三 常用无约束最优化方法(一) [实验目的] 编写最速下降法、Newton 法(修正Newton 法)的程序。 [实验学时] 2学时 [实验准备] 1.掌握最速下降法的思想及迭代步骤。 2.掌握Newton 法的思想及迭代步骤; 3.掌握修正Newton 法的思想及迭代步骤。 [实验内容及步骤] 编程解决以下问题:【选作一个】 1.用最速下降法求 22120min ()25[22]0.01T f X x x X ε=+==,,,. 2.用Newton 法求 22121212min ()60104f X x x x x x x =--++-, 初始点 0[00]0.01T X ε==,,. 最速下降法 Matlab 程序: clc;clear; syms x1 x2; X=[x1,x2]; fx=X(1)^2+X(2)^2-4*X(1)-6*X(2)+17; fxd1=[diff(fx,x1) diff(fx,x2)]; x=[2 3]; g=0; e=0.0005; a=1; fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); step=0; while g>e step=step+1; dk=-fan; %点x(k)处的搜索步长
ak=((2*x(1)-4)*dk(1)+(2*x(2)-6)*dk(2))/(dk(1)*dk(2)-2*dk(1)^2-2*dk(2)^2); xu=x+ak*dk; x=xu; %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf(' x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); %计算目标函数点x(k+1)处一阶导数值 fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); end %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf('\n最速下降法\n结果:\n x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); c++程序 #include
惯性约束核聚变
惯性约束核聚变 核能的安全使用是缓解能源危机的有效途径。相对于核裂变,核聚变具有无放射性,单位质量提供的能量多等优点,而且地球上核聚变物质储量远远多于核裂变物质储量。实现受控核聚变。 聚变的原理: 他们是利用加速器或其它方法使原子核相互碰撞, 从而得到或失去能量。 要实现受控核聚变,必须满足两个基本条件,一是必须将燃料加热到很高的热核反应温度;二是,必须在足够时间长时间内将高温高密度等离子体约束在一起。Lawson 判据限定了实现核聚变的具体条件,即受约束的等离子体必须达到一定的密度n 、温度T 及约束时间τ。对氘氚反应,)/(109.3311mm s n ?≥τ,T 约为K 810。 有两种方法,实现受控核聚变。一是磁约束聚变(Magnectic Confinement Fusion ,MCF ),就是利用磁场将带电离子约束住,使之发生聚变的反应。二是激光驱动惯性约束聚变,就是基于氢弹原理,即利用高能激光驱动器在极短时间将巨变燃料小球(靶丸)加热、压缩到高温、高密度,使之在中心“点火”,点燃后继核反应实现受控核聚变,从而获得干净聚变能源。
聚变过程可分为四个阶段:一、强激光束快速加热氘氚靶丸表面,形成等离子体烧蚀层;二、驱动器的能量以激光或X 光形式迅速传递给烧蚀体,使之加热并迅速膨胀;当壳体外部向外扩张时,根据动量守恒定理,剩余部分则向中心挤压,反向压缩燃料; 三、向心聚爆将靶丸压缩至一定程度,使氘氚燃料达到高温、高密度状态,在靶丸中心形成热点;四、热核燃烧在被压缩的燃料内部蔓延,使主体燃料发生聚变反应,产生数倍的能量增益,从而产生大量的聚变能输出。 现在的惯性约束核聚变存在以下问题: 一、激光和离子束功率没有达到足够大; 二、激光必须照射均匀,小球壳本身厚薄均匀; 三、目前的爆炸方法有待改进。 ICF 研究进展 自从60年代初激光器问世以后,中、美、日、前苏联等国即着手激光驱动ICF 研究,多年来ICF 研究已在世界范围内取得了重要进展。但目前仍处在科学上可行性研究 阶段,即掌握主要环节的靶物理规律,实现实验室演示点火目标。为此需要驱动器(主要是高功率、高能量激光器)、靶物理理论和实验、精密诊断设备、靶的制备五个方面协调研究发展。下面主要介绍美、法、日等国在激光驱动器和靶物理方面的研究发展情况。 美国 从1975年至今,已建立了6代固体激光器,输出功率提高了近5个量级。 1985年建成了当时世界上最大的固体激光器NOV A ,脉宽约1ns ,10路、三倍频,能量(下同)输出约20KJ 。1994年NOV A 完成精密化,能量升级至40KJ 。 1995年在Rochester 大学建成固体激光器OMEGA (1ns ,60路、约45KJ )。 正在建造国家点火装置(NIF ),3~5ns 、,192路、1.8KJ ,预计2005年前后建成。目前能源部的一个专门小组正在对NIF 的技术进行评估。 拍瓦(W 1510)装置(1ps 、1路、1KJ )正在运行。 法国 PHEBUS 装置约1ns 、2路、KJ 42?正在运行。 在美国帮助下正在研制百万千焦LMJ ,3~5ns ,240路,1.8MJ ,预计2010年建成。 P102超短脉冲激光器,约350fs ,1路,55TW 我国 1964年,王淦昌在国际上独立提出激光驱动聚变的建议,由此开始了我国ICF 研究历史。80年代初中国科学院与当时九院合作研究促进了我国ICF 的发展。1993年,国家高技术863计划成立了惯性约束聚变主题专家组后,规划了国家ICF 发展目标,并在驱动器、靶物理理论和实验、精密化诊断设备、靶的制备五方面研究取得了重大进展,为进一步的研究打下了重要基础。 经过早期几代固体激光器的研制,1986年建成神光一号(SG-1)———当时称为LF-12,脉宽1ns 、2路、基频能量为J 8002?,1994年退役;与此同时建成了星光装置(1ns 、1路),目前输出能量约100J 。 1994年决定建造∏-SG ,1ns 、8路、6KJ ()?1、3KJ (?3),经过改造,2000年已开始投入运行。 1996年开始进行,I∏-SG 原型概念设计。I∏-SG 为60路、1ns 、输出到靶面的总能量为60KJ (?3),它是我国进行点火前靶物理并外推到点火物理研究的驱动器,约
五种最优化方法
五种最优化方法 1.最优化方法概述 最优化问题的分类 1)无约束和有约束条件; 2)确定性和随机性最优问题(变量是否确定); 3)线性优化与非线性优化(目标函数和约束条件是否线性); 4)静态规划和动态规划(解是否随时间变化)。 最优化问题的一般形式(有约束条件): 式中f(X)称为目标函数(或求它的极小,或求它的极大),si(X)称为不等式约束,hj(X)称为等式约束。化过程就是优选X,使目标函数达到最优值。 2.牛顿法 简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法: 3)是一种函数逼近法。 原理和步骤 3.最速下降法(梯度法) 最速下降法简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法; 3)沿函数在该点处目标函数下降最快的方向作为搜索方向; 最速下降法算法原理和步骤 4?模式搜索法(步长加速法) 简介 1)解决的是无约束非线性规划问题; 2)不需要求目标函数的导数,所以在解决不可导的函数或者求导异常麻烦的函数的优化问题时非常有效。 3)模式搜索法每一次迭代都是交替进行轴向移动和模式移动。轴向移动的目的 是探测有利的下降方向,而模式移动的目的则是沿着有利方向加速移动。
模式搜索法步骤 5.评价函数法 简介 评价函数法是求解多目标优化问题中的一种主要方法。在许多实际问题中,衡量一个方案的好坏标准往往不止一个,多目标最优化的数学描述如下: min (f_1(x),f_2(x),…,f_k(x)) .g(x)<=o 传统的多目标优化方法本质是将多目标优化中的各分目标函数, 经处理或数学变换,转变成一个单目标函数,然后采用单目标优化技术求解。常用的方法有“线性加权和法”、“极大极小法”、“理想点法”。选取其中一种线性加权 求合法介绍。 线性加权求合法 6.遗传算法 智能优化方法是通过计算机学习和存贮大量的输入-输出模式映射关系,进而达到优化的一种方法,主要有人工神经网络法,遗传算法和模拟退火法等。遗传算法基本概念 1.个体与种群 个体就是模拟生物个体而对问题中的对象 (一般就是问题的解)的一种称呼。种群就是模拟生物种群而由若干个体组成的群体,它一般是整个搜索空间的一个很小的子集。 2.适应度与适应度函数 适应度就是借鉴生物个体对环境的适应程度,而对问题中的个体对象所设计的表征其优劣的一种测度。 适应度函数就是问题中的全体个体与其适应度之间的一个对应关系。该函数就是遗传算法中指导搜索的评价函数。 遗传算法基本流程 的就是对一定数量个体组成的生物种群进行选择、交叉、变异等遗传操作,最终求得最优解或近似最优解。 遗传算法步骤
【CN109959347A】激光差动共焦核聚变靶丸形态性能参数测量方法与装置【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910175919.7 (22)申请日 2019.03.08 (71)申请人 北京理工大学 地址 100081 北京市海淀区中关村南大街5 号 (72)发明人 赵维谦 王允 邱丽荣 (74)专利代理机构 北京理工正阳知识产权代理 事务所(普通合伙) 11639 代理人 邬晓楠 (51)Int.Cl. G01B 11/255(2006.01) G01B 11/24(2006.01) G01B 11/06(2006.01) G01B 11/00(2006.01) G01N 21/65(2006.01) (54)发明名称 激光差动共焦核聚变靶丸形态性能参数测 量方法与装置 (57)摘要 本发明公开的激光差动共焦核聚变靶丸形 态性能参数测量方法与装置,属于共焦显微成 像、光谱探测及激光惯性约束核聚变技术领域。 本发明将激光差动共焦技术与拉曼光谱探测技 术结合,利用激光差动共焦技术对激光聚变靶丸 壳层的内、外表面进行精密层析定焦,利用拉曼 光谱探测技术对靶丸壳层和界面进行光谱激发 探测,并进一步通过正交回转驱动技术对靶丸进 行三维回转驱动获得靶丸的内/外表面三维形态 参数和壳层/界面性能分布参数等,实现核聚变 靶丸形态性能参数综合测量。本发明能够为激光 惯性约束核聚变仿真实验研究、靶丸制备工艺研究和靶丸筛选提供数据基础和检测手段。本发明在激光惯性约束核聚变、高能物理和精密检测领 域有广泛的应用前景。权利要求书3页 说明书6页 附图3页CN 109959347 A 2019.07.02 C N 109959347 A
我国激光惯性约束聚变实验研究进展
中国科学 G 辑: 物理学 力学 天文学 2009年 第39卷 第11期: 1571 ~ 1583 https://www.wendangku.net/doc/403077362.html, https://www.wendangku.net/doc/403077362.html, 《中国科学》杂志社 SCIENCE IN CHINA PRESS 我国激光惯性约束聚变实验研究进展 江少恩*, 丁永坤, 缪文勇, 刘慎业, 郑志坚, 张保汉, 张继彦, 黄天晅, 李三伟, 陈家斌, 蒋小华, 易荣清, 杨国洪, 杨家敏, 胡昕, 曹柱荣, 黄翼翔 中国工程物理研究院激光聚变研究中心, 绵阳 621900 * E-mail: jiangshn@https://www.wendangku.net/doc/403077362.html, 收稿日期: 2009-03-15; 接受日期: 2009-08-02 国家高技术研究发展计划和国家自然科学基金(批准号: 10775120)资助项目 摘要 介绍国内自2000年以来的激光惯性聚变(inertial confmement fusion, ICF)实验研究进展, 主要内容为神光Ⅱ激光装置上的实验, 也对刚建成不久的神光III 原型装置上的实验作简要介绍. 在神光Ⅱ激光装置上开展了多项的物理实验研究, 进行了系列综合和分解实验, 获得的主要实验技术指标为: 黑腔峰值辐射温度超过二百万度; 辐射驱动DT 聚变中子产额达108和辐射驱动压缩DD 燃料密度超过10倍液氘密度; 辐射不透明的样品温度接近100 eV. 在神光II 装置上得到这些结果表明国内在惯性约束聚变研究方面取得了显著的进步. 随着神光III 原型装置建造的完成, 2007年在该装置上进行了首轮物理实验, 开展了黑腔物理和辐射内爆物理实验, 首轮实验的成功说明神光Ⅲ原型装置已具备实验能力. 关键词 激光聚变 神光II 激光装置 神光III 原型装置 激光惯性聚变(ICF) 在地球上实现受控热核聚变反应, 将可能为人类提供丰富、经济、安全的能源. 惯性约束聚变(ICF)是实现受控热核聚变很有希望的途径之一, 它是通过内爆对热核燃料进行压缩, 使其达到高温高密度, 在内爆运动过程中惯性约束下实验热核点火和燃烧, 从而获取聚变能的方法. 激光聚变是用激光作为驱动源的. ICF 领域研究工作的开展无论对国民经济、 军事应用, 还是对于基础研究探索都有着重要而特殊的意义. ICF 早已成为当代重大而难度大的国际高科技研究课题, 为了演示点火和聚变燃烧, 世界各地都在进行兆焦耳激光器拍瓦激光器高重复率能量驱动器的运转和建造, 美国于2009年建成国家点火装置(NIF)[1], 法国正在加紧建造兆焦激光装置(LMJ)[2]. ICF 的基本思想是: 利用激光或离子束作驱动源, 脉冲式地提供高强度能量,均匀地作用于装填氘氚(DT)燃料的微型球状靶丸外壳表面, 形成高温高压等离子体, 利用反冲压力, 使靶外壳极快地向心运动, 压缩氘氚主燃料层到每立方厘米的几百克质量的极高密度, 并使局部氘氚区域形成高温高密度热斑, 达到点火条件(离子温度Ti>5 keV, 燃料的面密度ρR hs > 0.3 g/cm 2), 驱动脉冲宽度为纳秒级, 在高温高密度热核燃料来不及飞散之前, 进行充分热核燃烧, 放出大量聚变能. 采用激光产生的惯性约束聚变称为激光聚变. 利用激光产生驱动惯性约束聚变内爆需要的能流和压强可采用两种途径(见图1). 在直接驱动中, 多束激光束直接均匀辐照含有热核燃料的聚变靶丸, 激光能量被靶丸外层低密度的冕区中的电子吸收, 电子热传导将能量输运到靶壳的高密度区, 驱动烧
激光原理及应用 - 激光核聚变
激光核聚变 激光核聚变(laser nuclear fusion)是以高功率激光作为驱动器的惯性约束核聚变。在探索实现受控热核聚变反应过程中,随着激光技术的发展,1963年苏联科学家N.巴索夫和1964年中国科学家王淦昌分别独立提出了用激光照射在聚变燃料靶上实现受控热核聚变反应的构想,开辟了实现受控热核聚变反应的新途径激光核聚变。激光核聚变要把直径为1毫米的聚变燃料小球均匀加热到1亿度,激光器的能量就必须大于1亿焦,这在技术上是很难做到的。直到1972年美国科学家J.纳科尔斯等人提出了向心爆聚原理以后,激光核聚变才成为受控热核聚变研究中与磁约束聚变平行发展的研究途径。 1、基本原理 激光核聚变中的靶丸是球对称的。球的中心区域(半径约为3毫米)充有低密度(≤1克/厘米3)的氘、氚气体。球壳由烧蚀层和燃料层组成:烧蚀层的厚 度为200—300微米,材料是二氧化硅等低Z(原子序数)材料;燃料层的厚度约300微米,材料是液态氘、氚,其质量约5毫克。有的靶丸的中心区域是真空,球壳由含有氘、氚元素的塑料组成。有的靶丸则用固体氘、氚燃料,球壳由玻璃组成。 当激光对称照射在靶丸表面上时,烧蚀层表面材料便蒸发和电离,在靶丸周围形成等离子体。激光束的部分能量在临界密度层处(该处的等离子体频率与入射的激光频率相等)被反射掉,另一部分能量则被等离子体吸收并加热等离子体。等离子体的热量通过热传导穿过临界密度层向烧蚀层内传递,烧蚀层材料蒸发并向四周飞散产生反作用力(类似火箭推进原理),将靶丸球壳向靶心压缩(爆聚)产生传播的球形激波,使靶丸内氘、氚燃料的密度和温度增加,这种效应称为向心爆聚。如果激光脉冲的波形选得合适,则向心传播的球形激波可会聚到靶丸球心区域,使球心区域一部分氘、氚燃料优先加热,形成热斑。当热斑中的温度高到足以产生聚变反应时,则释放出的聚变能量就可驱动通过靶丸径向向外传播的超声热核爆炸波,并在靶丸物质移动之前就能将燃料层的聚变燃料加热并产生聚变反应,最后将烧蚀层毁掉。因此,激光束的能量仅用于产生向心爆聚和加热靶心的热斑燃料上,不需将整个靶丸均匀加热到热核聚变温度,从而降低了对激光器功率的要求。
最优化方法试卷与答案5套
《最优化方法》1 一、填空题: 1.最优化问题的数学模型一般为:____________________________,其中 ___________称为目标函数,___________称为约束函数,可行域D 可以表示 为_____________________________,若______________________________, 称*x 为问题的局部最优解,若_____________________________________,称*x 为问题的全局最优解。 2.设f(x)= 212121522x x x x x +-+,则其梯度为___________,海色矩阵___________,令,)0,1(,)2,1(T T d x ==则f(x)在x 处沿方向d 的一阶方向导数为___________,几何意义为___________________________________,二阶 方向导数为___________________,几何意义为_________________________ ___________________________________。 3.设严格凸二次规划形式为: 012. .222)(min 21212 12 221≥≥≤+--+=x x x x t s x x x x x f 则其对偶规划为___________________________________________。
4.求解无约束最优化问题:n R x x f ∈),(min ,设k x 是不满足最优性条件的第k 步迭代点,则: 用最速下降法求解时,搜索方向k d =___________ 用Newton 法求解时,搜索方向k d =___________ 用共轭梯度法求解时,搜索方向k d =_______________ ____________________________________________________________。 二.(10分)简答题:试设计求解无约束优化问题的一般下降算法。 三.(25分)计算题 1. (10分)用一阶必要和充分条件求解如下无约束优化问题的最优解: )1(632)(m in 21212131----=x x x x x x x f . 2. (15分)用约束问题局部解的一阶必要条件和二阶充分条件求约束问题: 1)(. .)(min 22 2 1 2 1=-+==x x x c t s x x x f 的最优解和相应的乘子。 四. 证明题(共33分) 1.(10分)设δ++=x r Gx x x f T T 2 1 )(是正定二次函数,证明一维问题
五种最优化方法
精心整理 五种最优化方法 1.最优化方法概述 1.1最优化问题的分类 1)无约束和有约束条件; 2)确定性和随机性最优问题(变量是否确定); 3 4 1.2 2. 2.1 1 2 3 2.2 3. 3.1 1 2 3 3.2 4.模式搜索法(步长加速法) 4.1简介 1)解决的是无约束非线性规划问题; 2)不需要求目标函数的导数,所以在解决不可导的函数或者求导异常麻烦的函数的优化问题时非常有效。 3)模式搜索法每一次迭代都是交替进行轴向移动和模式移动。轴向移动的目的是探测有利的下降
方向,而模式移动的目的则是沿着有利方向加速移动。 4.2模式搜索法步骤 5.评价函数法 5.1简介 评价函数法是求解多目标优化问题中的一种主要方法。在许多实际问题中,衡量一个方案的好坏标准往往不止一个,多目标最优化的数学描述如下: min(f_1(x),f_2(x),...,f_k(x)) s.t.g(x)<=0 传统的多目标优化方法本质是将多目标优化中的各分目标函数,经处理或数学变换,转变成一个单目标函数,然后采用单目标优化技术求解。常用的方法有“线性加权和法”、“极大极小法”、“理想点法”。选取其中一种线性加权求合法介绍。 5.2线性加权求合法 6.遗传算法 智能优化方法是通过计算机学习和存贮大量的输入-输出模式映射关系,进而达到优化的一种方法,主要有人工神经网络法,遗传算法和模拟退火法等。 6.1遗传算法基本概念 1.个体与种群 个体就是模拟生物个体而对问题中的对象(一般就是问题的解)的一种称呼。 种群就是模拟生物种群而由若干个体组成的群体,它一般是整个搜索空间的一个很小的子集。 2.适应度与适应度函数 适应度就是借鉴生物个体对环境的适应程度,而对问题中的个体对象所设计的表征其优劣的一种测度。 适应度函数就是问题中的全体个体与其适应度之间的一个对应关系。该函数就是遗传算法中指导搜索的评价函数。 6.2遗传算法基本流程 遗传算法的中心思想就是对一定数量个体组成的生物种群进行选择、交叉、变异等遗传操作,最终求得最优解或近似最优解。 遗传算法步骤 步1在搜索空间U上定义一个适应度函数f(x),给定种群规模N,交叉率Pc和变异率Pm,代数T;
最优化方法(试题+答案)
一、 填空题 1.若()()??? ? ??+???? ?????? ??=212121 312112)(x x x x x x x f , 则=?)(x f ,=?)(2x f . 2.设f 连续可微且0)(≠?x f ,若向量d 满足 ,则它是f 在x 处的一个下降方向。 3.向量T )3,2,1(关于3阶单位方阵的所有线性无关的共轭向量有 . 4. 设R R f n →:二次可微,则f 在x 处的牛顿方向为 . 5.举出一个具有二次终止性的无约束二次规划算法: . 6.以下约束优化问题: )(01)(..)(min 212121 ≥-==+-==x x x g x x x h t s x x f 的K-K-T 条件为: . 7.以下约束优化问题: 1 ..)(min 212 2 21=++=x x t s x x x f 的外点罚函数为(取罚参数为μ) . 二、证明题(7分+8分) 1.设1,2,1,:m i R R g n i =→和m m i R R h n i ,1,:1+=→都是线性函数,证明下面的约束问题: } ,,1{, 0)(},1{, 0)(..)(min 1112 m m E j x h m I i x g t s x x f j i n k k +=∈==∈≥=∑= 是凸规划问题。 2.设R R f →2:连续可微,n i R a ∈,R h i ∈,m i ,2,1=,考察如下的约束条件问题:
} ,1{,0} 2,1{,0..) (min 11m m E i b x a m I i b x a t s x f i T i i T i +=∈=-=∈≥- 设d 是问题 1 ||||,0,0..)(min ≤∈=∈≥?d E i d a I i d a t s d x f T i T i T 的解,求证:d 是f 在x 处的一个可行方向。 三、计算题(每小题12分) 1.取初始点T x )1,1()0(=.采用精确线性搜索的最速下降法求解下面的无约束优化问题(迭代2步): 2 2 212)(min x x x f += 2.采用精确搜索的BFGS 算法求解下面的无约束问题: 212 2212 1)(min x x x x x f -+= 3.用有效集法求解下面的二次规划问题: . 0,001..42)(min 21212 12 221≥≥≥+----+=x x x x t s x x x x x f 4.用可行方向算法(Zoutendijk 算法或Frank Wolfe 算法)求解下面的问题(初值设为)0,0() 0(=x ,计算到)2(x 即可): . 0,033..22 1)(min 21211222121≥≥≤+-+-= x x x x t s x x x x x x f
惯性约束核聚变
惯性约束核聚变原理与反应堆技术 1.惯性约束基本原理 核能可分为裂变能与聚变能。目前,核电站通过受控释放裂变能实现发电,而受控核聚变仍处于研究阶段。实现受控核聚变反应主要有两种途径:磁约束和惯性约束。后者即以下内容讨论的主题。 惯性约束(ICF),即利用高能驱动器在极短时间内将聚变燃料小球(靶丸)加热压缩到高温、高密,使之在中心“点火”,实现受控核聚变。以氢弹的爆炸为例,位于其中心的原子弹的爆炸在极短时间内将氢弹中的热核装料迅速加热和压缩到高温、高密,引起燃料的聚变燃烧。由于这一过程非常短暂,在燃料膨胀但因自身惯性还没有来得及飞散之前,聚变反应就已经发生。这种未对燃料等离子体采取任何约束措施,只依靠本身惯性保持顺利完成核聚变就是惯性约束核聚变。但氢弹的爆炸是不可控的,激光器代替原子弹点燃热核反应使ICF成为可控核聚变。 激光的能量能在时间和空间上进行高度的集中,因此能在焦点上得到非常高的功率密度。现在惯性约束核聚变研究所用的激光器多数是钕玻璃激光器。而粒子束作为惯性约束核聚变的驱动器,原理与激光一样,只不过它是以粒子束来代替激光。所以想采用粒子束,是因为它的能量转换效率比之激光要高出一个量级。 2.反应堆相关 (1)能量流程 该系统中,假设驱动器输出的能量为E D,其效率为ηD,它通过反应室壁上的入射通道击中靶丸。靶丸聚变反应,产生相当于驱动束能Q倍的能量E f。再经反应室增值层的能量倍增(增值系数为M),并以热能的形式输出。发电机的热点转换效率为ηT,发电机发出的毛电能为E g,其中一部分输入电网,另一部分再循环。整个反应堆系统的效率为ηs,其定义为: ηs=纯电能输出/聚变反应的热能输出 系统效率可表示为: ηs=E g(1-ε)/ME f=ηT(1-ε)[(MQ+1)E D+γ(1/ηD-1) E D]/ME f (2)ICF聚变堆涉及的问题 1> 从理论上了解靶丸的能量吸收、反射、能量输运、压缩、不稳定性、点火和聚变燃烧等物理学。 2> 实验上获得高能量增益的关键因素的满意值。 3> 研制出高能量、高重复率、适当的脉冲形状、短波长和高效率的驱动器。 4> 制造出稳定的、精确的、廉价的、自动化的高增益靶丸生产系统。而且靶材料的选择要避免产生长寿命的放射性同位素。 5> 必须有一个经得起重复爆炸而不至于损坏的反应室(堆腔)。此堆腔能够吸收热核反应的产物——中子、X射线和靶丸碎片等的能量。它还能利用14MeV的中子去增值氚,以维持D-T反应中氚的消耗。 6> 要有一个靶丸的注入、导向和检测系统,确保靶丸以1~10Hz的频率注入反应室,而且当靶丸飞经驱动器的公共焦点时,驱动器发火,准确将靶丸击中。7> 要有一个泵浦系统。为避免入射的驱动束受到散射或衰减,该泵浦系统能在两次爆炸之间迅速地将反应室中的靶丸碎片和废气排出,使反应室重新恢复到新
第三章 无约束最优化方法
第三章无约束最优化方法 本章内容及教学安排 第一节概述 第二节迭代终止原则 第三节常用的一维搜索方法 第四节梯度法 第五节牛顿法 第六节共轭方向法 第七节变尺度法 第八节坐标轮换法 第九节鲍威尔方法 第一节概述 优化问题可分为 无约束优化问题 有约束优化问题 无约束最优化问题求解基于古典极值理论的一种数值迭代方法,主要用来求解非线性规划问题 迭代法的基本思想:
所以迭代法要解决三个问题 1、如何选择搜索方向 2、如何确定步长
3、如何确定最优点(终止迭代) 第二节 迭代终止准则 1)1K K X X ε+-≤ 111/2 21K K K K n i i i X X X X ε++=??-=-≤???? ∑() 2) 11()()()() () K K K K K f X f X f X f X or f X ε ε ++-≤-≤ 3)(1)()K f X ε+?≤ 第三节 常用的一维搜索方法 本节主要解决的是如何确定最优步长的问题。 从初始点(0)X 出发,以一定的步长沿某一个方向,可以找到一个新的迭代点,其公式如下: (1)(0)00(2)(1)11(1)() K K k k X X S X X S X X S ααα+=+=+= + 现在假设K S 已经确定,需要确定的是步长k α,就把求多维目标函数的极小值这个多维算过程中,当起步点和方向问题,变成求一个变量即步长的最优值的一维问题了。即 (1)()min ()min ()min ()K K K k k f X f X S f αα+=+= 由此可见,最佳步长*K α由一维搜索方法来确定 求*k α,使得()()()()()()min K K K K f f X S αα=+→ 一、一维搜索区间的确定 区间[,]a b 应满足 ()(*)()f a f f b α><
惯性约束聚变能源与激光驱动器.
第18卷第67期大自然探索V o l.18,Sum N o.671999年第1期EXPLO RA T I ON O F NA TU R E N o.1,1999惯性约束聚变能源与激光驱动器Ξ 中国工程院院士 中国科学院上海光学精密机械研究所研究员 国家高技术863—416主题专家组成员 范滇元 中国科学院院士 北京应用物理与计算数学研究所研究员 国家高技术863—416主题专家组首席科学家 贺贤土 聚变能源是一种“干净的”几乎取之不尽的能源。研究进展表明,有希望在21世纪中叶实现商业发电。惯性约束聚变则是实现聚变能源的主要途径之一。80年代末,美国用地下核爆的辐射能量成功地驱动惯性约束聚变,证实了这一技术路线在科学上的可行性。90年代以来,一些国家制定了庞大的发展计划,以“点火”为目标,建造百万焦耳级的巨型激光装置。同时,并行地开始了用于聚变能电站的驱动器研究。我国已有30多年研究基础,现已制定跨世纪的“神光- ”计划,将在下世纪初建成10万J级的激光装置,开展相关基础物理研究。 1聚变能源是地球上的人造小太阳 能源是人类赖以生存的基本条件。据估计,到下世纪中叶前后,全世界能源消费的需求将超过传统能源的供给能力,必须开发新的能源以弥补其短缺。聚变能源是新能源的重要候选者之一。
氢的同位素氘和氚在高温下聚合成氦核并释放出中子的过程称为“聚变”。太阳的巨大能源即来源于聚变,而氢弹的爆炸则是地球上人为的聚变反应。氘和锂(可产生氚在海中蕴藏量极其丰富,120kg海水可产生相当30L石油放出能量的聚变能,聚变材料可谓“取之不尽”。如果能在人工可控条件下实现聚变反应,则可以提供几乎用之不竭的能源。和传统能源相比,聚变燃料具有最高的比能。 然而聚变反应所要求的条件却极为苛刻。自持反应要有1亿k W h左右的高温,并且参与反应的粒子密度n要足够高,能维持一定的反应时间Σ,即nΣ值要达到1014s c m3以上,这就是著名的劳逊判据。 为了实现上述条件,目前有两条技术途径:磁约束聚变(M CF和惯性约束聚变(I CF。 惯性约束聚变的基本思想是:利用激光或离子束作为驱动源,脉冲式地提供高强度能量,均匀地作用于装填氘氚燃料的微型球状靶丸外壳表面形成高温高压等离子体,利 ? 1 3 ? Ξ谨以此文缅怀惯性约束聚变研究先驱王淦昌院士 用反冲压力,使靶的外壳极快向心运动,压缩氘氚主燃料层到每立方厘米几百克质量的极高密度,并使局部氘氚区域形成高温高密度热斑,达到点火条件;驱动脉冲宽度为纳秒级,在高温高密度热核燃料来不及飞散之前,进行充分热核燃烧,放出大量聚变能,所以又称惯性约束聚变(I CF 。实际上这和太阳的聚变过程相仿,只是约束高温等离子体的方式有所不同。60年代初,我国激光聚变研究刚刚起步的时候,钱学森院
无约束最优化直接方法和间接方
无约束最优化直接方法和间接方法的异同
无约束最优化直接方法和间接方法的异同一、什么是无约束最优化 最优化方法(也称做运筹学方法)是近几十年形成的,它主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。最优化方法的主要研究对象是各种有组织系统的管理问题及其生产经营活动。其的目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。实践表明,随着科学技术的日益进步和生产经营的日益发展,最优化方法已成为现代管理科学的重要理论基础和不可缺少的方法,被人们广泛地应用到公共管理、经济管理、工程建设、国防等各个领域,发挥着越来越重要的作用。 最优化问题分为无约束最优化和约束最优化问题,约束最优化问题是具有辅助函数和形态约束条件的优化问题,而无约束优化问题则没有任何限制条件。无约束最优化问题实际上是一个多元函数无条件极值问题。 虽然在工程实践中,大多数问题都是具有约束的优化问题,但是优化问题的处理上可以将有约束的优化问题转化为无约束最优化问题,然后按无约束方法进行处理。或者是将约束优化问题部分转化为无约束优化问题,在远离极值点和约束边界处按无优化约束来处理,在接近极值点或者约束边界时按照约束最优化问题处理。所以无约束优化问题的解法不仅是优化设计方法的基本组成部分,也是优化方法的基础。 无约束最优化方法大致分为两类:一类是使用导数的间接方法,即在计算过程中要用到目标函数的导数;另一类是直接方法,即只要用到目标函数值,不需要计算导数。这里我们比较这两类方法的异同。 二、无约束最优化方法 1. 使用导数的间接方法 1.1 最速下降法 函数的负梯度方向是函数值在该点下降最快的方向。将n维问题转化为一系列沿负梯度方向用一维搜索方法寻优的问题,利用负梯度作为搜索方向,故称