凌华采集卡labview下操作步骤
凌华采集卡labview下操作步骤演示
首先保证安装的两个驱动版本是最新版驱动程序
1.正确安装DAQPilot(V
2.2.0.0125)和DAQMaster,前者是驱动程序和程序部分,后者主
要功能是管理软件用来设置板卡的设备号。
2.在安装好板卡及以上驱动程序后,到设备管理器里确认安装的采集卡上没有感叹号或问
号,如果有更新下驱动程序。
3.DAQPilot下有两种编程方式:
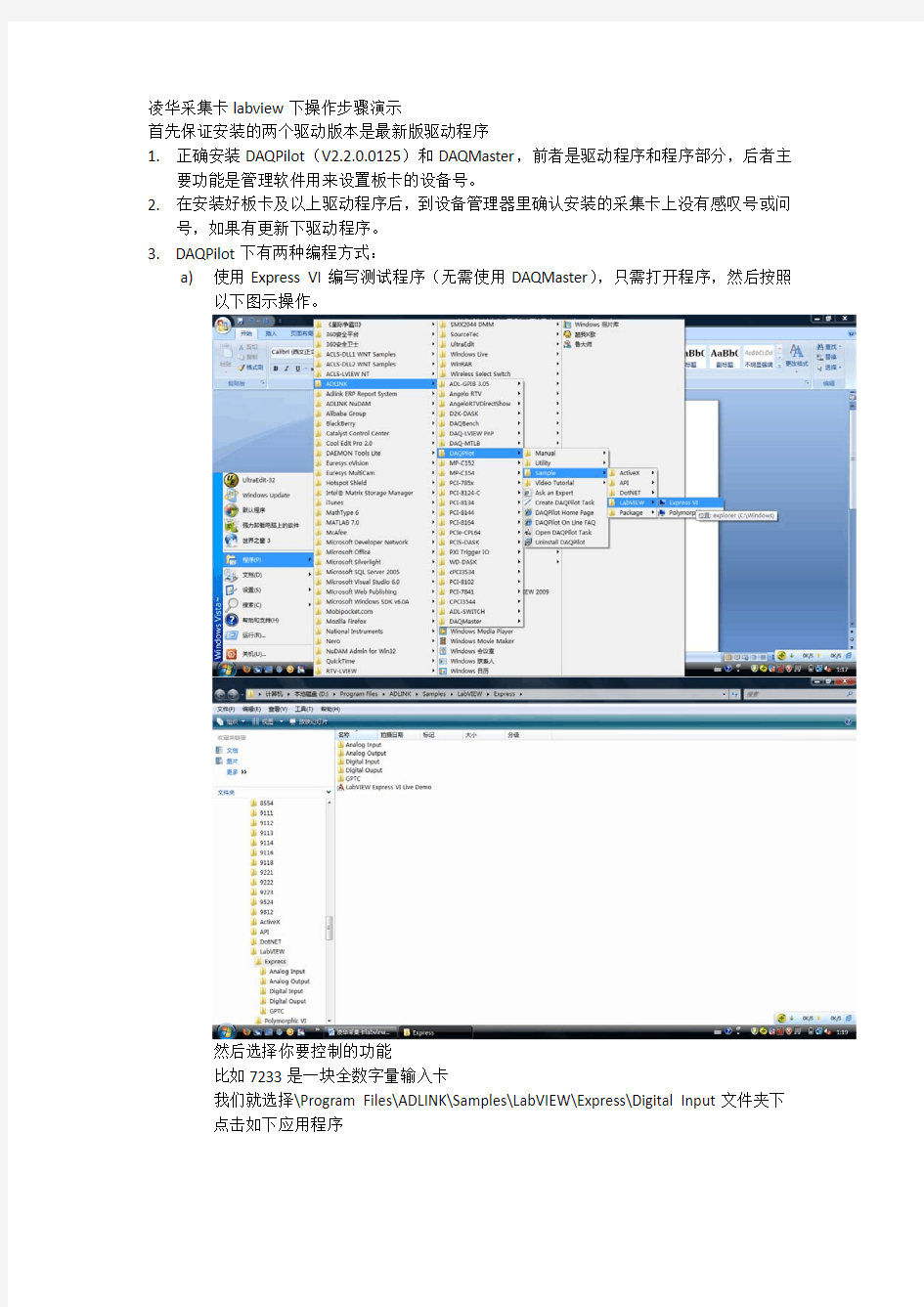
a)使用Express VI编写测试程序(无需使用DAQMaster),只需打开程序,然后按照
以下图示操作。
然后选择你要控制的功能
比如7233是一块全数字量输入卡
我们就选择\Program Files\ADLINK\Samples\LabVIEW\Express\Digital Input文件夹下
点击如下应用程序
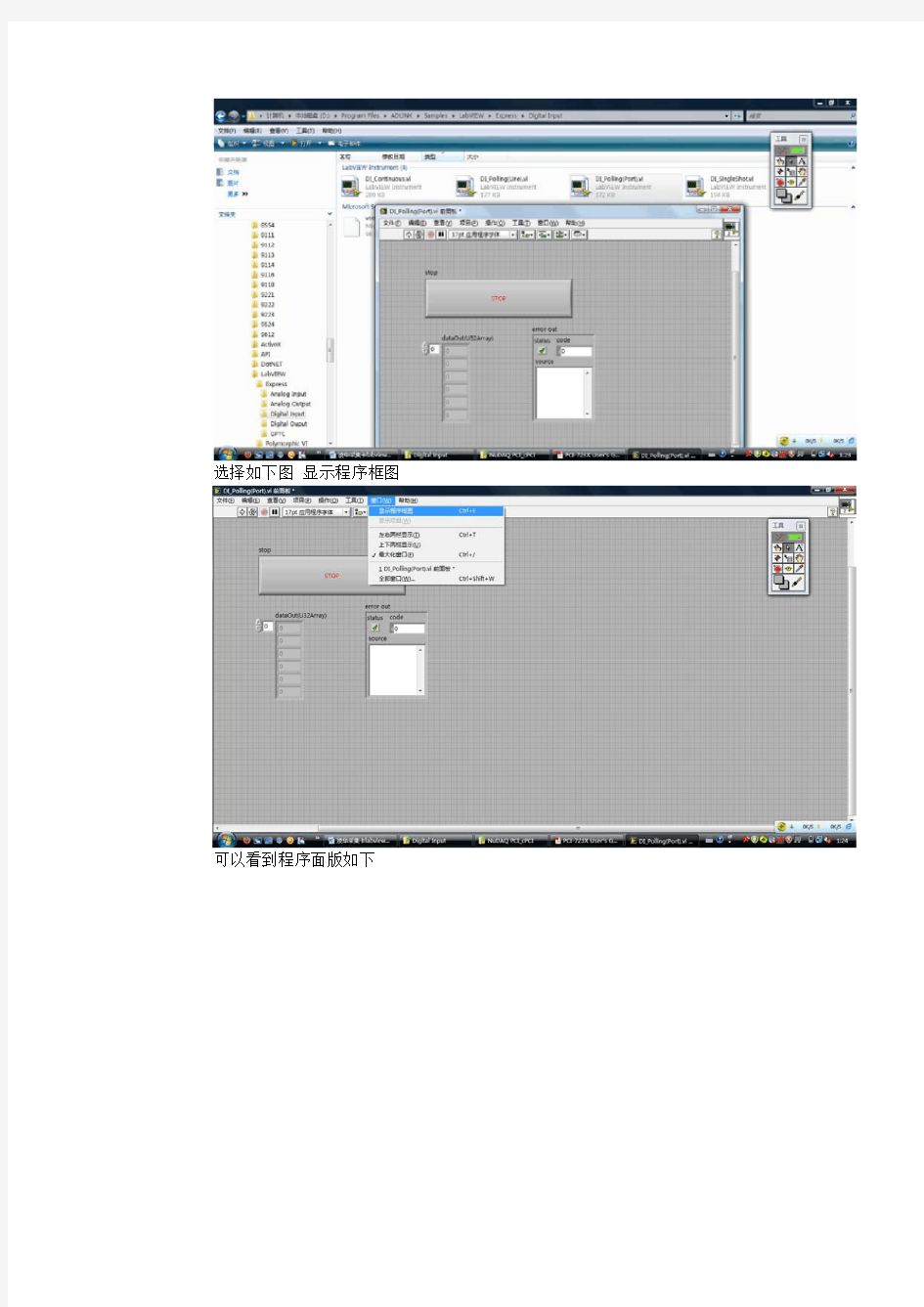
选择如下图显示程序框图
可以看到程序面版如下
然后双击中间的模块如下:
点击Modify进行配置类似如下示图
然后一直点击Next,直到Finish
然后点击labview环境运行按钮,数据就会出现在前面板的表格里。b)使用Polymorphic VI编写程序,需要首先配置DAQMaster,操作如下图:
点击打开后,还需点击几个图标
左上角的展开图标和带红色字母A的图标就会显示主机里安装的所有板卡了,我的电脑里没有板卡,所以只显示了一个虚拟设备,且设备号是Dev0,此设备号就是我们需要为板卡设置的,我们在Dev0上右键点击选择Edit,出现如下图
假如我们机器里差了块7233我们可以重新起个名字例如Dev1.然后点击确定。此时DAQMaster工作就做玩了。
我们打开测试程序
此时我们选择多态程序。
选择Digital IO Samples.llb里的如下程序
我们把里面默认的Dev0改成我们刚在DAQMaster里设置的Dev1,然后把后面的通道可以改成0:31,同时可以把指示灯拉长也变成32个。如下图
然后点击左上角运行图标,程序就可以运行了。
钢化炉简易操作使用说明
钢化炉简易操作使用说明 (2) 主工作界面 (3) 参数控制界面 (5) 高级参数设置界面 (8) 加热控制界面 (9) 自动升温控制界面 (10) PLC手动控制界面 (11) PLC状态显示界面 (12) 报警显示界面 (14) 开机显示界面 (15) 风路状态显示界面 (15) 一般性故障排除 (16) 操作安全注意事项: (17)
钢化炉简易操作使用说明 该钢化炉控制系统是由我公司参考当前行业多家最先进的钢化炉控制系统核心理念,完全自主研发的一个全新的控制操作系统,该系统的核心部分由上位机和可编程控制器组成,外加一些辅助动作器件,上位机采用研华工控机和通讯板卡组成通信控制中心,主要的人机界面在这里处理,包括温度控制,参数修改,控制显示,详细的报警显示,帮助信息提示功能。 下位机部分运动控制核心是由可编程序控制器提供,主要是依照上位机提供的参数进行钢化炉动作逻辑控制,连续的辅助控制,玻璃钢化过程中的各种辅助动作控制。 首先介绍钢化炉的控制系统特点,钢化炉控制系统主要由四部分组成; 一、工作状态显示及基本控制参数显示界面,称为主工作页 面; 二、二级参数及基本底层状态显示界面,称为参数控制界面; 三、高级参数控制界面,系统安全性、系统维护工作主要在 这里控制; 四、辅助工作界面分控制界面和状态显示界面,报警显示界 面,启动画面,退出画面,自动升温控制界面。
主工作界面 该界面主要显示钢化炉的各种工作状态,工作模式,可当场设置的对流风机的速度,各个环节的运动速度,三个工作阶段的主风机的工作速度,各个状态的时间进度,系统自动测量的玻璃长度,当前的控制温度和系统的设置温度。用户登录状态信息及按钮,其它工作界面的切换按钮,设置温度和实际温度、开关控制状态对比指示组,三个上部空间温度,三个下部空间温度,加热1剩余时间,加热2剩余时间,加热3剩余时间,钢化剩余时间,冷却剩余时间,各个工作状态指示灯,玻璃在炉里位置。
凌华科技发表高端四轴运动控制卡PCI
凌华科技发表高端四轴运动控制卡PCI- 凌华科技发表高端四轴运动控制卡PCI-8154 产业计算机应用平台供货商-凌华科技凌华科技推出高端四轴四轴运动控制卡PCI-8154,提供四轴脉冲输出,脉冲信号输出信号输出频率高达6.55MHz,可控制伺服马达、步进马达及线性马达。凌华PCI-8154轴控卡采用模块化设计,除了运动控制功能,其它功能如分布式I/O控制、高速触发信号输出以及电子凸轮控制等,可通过使用凌华延伸子板得以实现。?通过分布式I/O子板,用户可以把集中式轴控与分布式I/O控制整合于一个控制器中。高速的触发信号子板能够提供高达2MHz的触发信号,子板提供大量内存空间,可储存高达两百万个位置比较点,十分适合高端线性扫描的应用。?? ?凌华PCI-8154轴控卡提供13种归零模式与背隙补偿功能。利用配线控制器串接还可实现跨卡多轴的同动同停功能。凌华PCI-8154轴控卡针对安全性考虑,提供硬件急停功能,当有紧急事故发生时,用户利用急停开关控制,控制器立即停止脉冲信号输出,直到状况解除。?凌华PCI-8154轴控卡与其它凌华轴控卡相同,适用于三菱、松下及安川伺服驱动器与步进电机。若搭配硬件连续运动功能,可在连续运动轨迹应用中,进行平滑运动。更多产品信息,请浏览凌华科技企业网站:/IA。??关于凌华?凌华科技致力于量测、自动化及计算机通讯科技之改进及创新,提供解决方案给全球网络电信、智能交通及电子制造电子制造客户。凭着对专业技术的执着与实践客户承诺的自我要求,领先业界推出多项
创新性产品,获ISO-9001、ISO-14001、TL9000等多项认证,并为国内工业计算机业界唯一导入6 Sigma并通过国际大厂专业稽核的生产体系。凌华科技为Intel? 通讯联盟一级会员, PICMG协会可参与制定规格的会员,与PXI Systems Alliance协会董事会及最高等级会员,并于2005年加入LXI Consortium。目前在美国、新加坡、中国设有子公司,在印度、德国与韩国设有办事处,为当地客户提供快捷服务和实时支持。凌华科技(中国)有限公司为电子制造、电信交通、政府电子客户提供高性价比产品和专业服务。期能通过深耕行业市场,成为中国产业应用电脑领导品牌。
AGV控制板卡的设计
题目:AGV控制板卡的设计 学生姓名高志伟 学号200715010133 班级电气071501 所属院(系)电子信息工程学院 指导教师刘红兵 2011年6月16日
太原科技大学毕业设计(论文)任务书 学院(直属系):电子信息工程学院时间:2011年3月15日学生姓名高志伟指导教师刘红兵设计(论文)题目AGV控制板卡的设计 主要研究内容1、了解AGV控制系统的结构 2、掌握单片机原理及应用 3、掌握模拟滤波和数字滤波 4、学习C语言编程 5、了解单片机硬件、软件的设计方法 研究方法理论分析、硬件设计、软件设计、系统调试 主要技术指标(或研究目标)1、设计一个单片机信号采集卡 2、16路模拟量输入信号、带隔离放大 3、8路模拟输入信号、带多路转换、光电隔离 4、设计LED数码动态显示电路,用于指示各回路的工作状态 5、编制相关的应用程序 教研室 意见 教研室主任(专业负责人)签字:年月日
目录 摘要............................................................................................................................III 第1章绪论 (1) 1.1论文研究的背景及意义 (1) 1.2自动导引小车的定义及特点 (2) 1.3AGV的导引方式 (3) 1.4自动导引小车的发展简史 (4) 1.5自动导引小车的应用现状 (6) 1.6AGV的关键技术及本论文的研究内容 (7) 1.6.1自动导引小车的关键技术 (7) 1.6.2本论文研究的主要内容: (7) 1.7本章小结 (8) 第2章AGV结构简介及板卡概述 (9) 2.1控制系统的分类 (9) 2.1.1嵌入式控制系统 (9) 2.1.2顺序控制系统 (9) 2.1.3过程控制系统 (9) 2.2AGV结构简介 (10) 2.3AGV的系统组成 (11) 2.4认识板卡 (12) 2.4.1什么是板卡 (12) 2.4.2数据采集卡 (12) 第3章AGV控制板卡的主要元件选取 (15) 3.1单片机的选取 (15) 3.1.180C51系列单片机 (15) 3.1.2TMS320 (19) 3.1.3PIC (19) 3.1.4AVR (20)
在LabVIEW中利用DLL实现数据采集
在LabVIEW中利用DLL实现数据采集Realization of Data Acquis ition with DLL in LabVIEW 班级学号:0704114-23 姓名:杨鹏
摘要: 随着计算机技术及虚拟仪器技术的迅速发展, 虚拟仪器正逐渐成为测试领域的发展方向。本文介绍了在LabVIEW 环境下驱动普通数据采集卡的重要方法- - 动态链接库机制(DLL), 并结合具体实例介绍了一种利用LabVIEW 提供的Call LibraryFunction (CLF)节点实现对动态链接库(DLL)调用的关键技术及步骤, 实现LabV IEW 与普通数据采集卡的结合, 丰富LabVIEW 对硬件的控制能力。并将数据库技术应用于虚拟测试系统中, 建立了Access 数据库, 实现数据的存储和自动管理,从而拓展了虚拟测试系统的功能。 关键词:动态链接库(DLL); 数据采集; 1 绪论
目前, 电子测试仪器的发展方向正在从简单功能组合向以个人计算机(PC)为核心的通用虚拟测试平台过渡, 从硬件模块向软件包形式过渡。建立在PC 机和数据采集设备上的虚拟仪器系统, 由于其特有的灵活和强大的功能, 也越来越广泛的应用于实验室研究和工业控制中的测试及测量领域。从简单的仪器控制, 数据采集到尖端的测试和工业自动化, 从大学实验室到工厂, 从探索研究到技术集成, 人们都可以发现LabVIEW 应用的成果和开发的产品。LabVIEW采用基于流程图的图形化编程方式, 也被成为G 语言(graphical language)。 G 语言编程和虚拟仪器技术已经成为工业界和学术界关注的热点技术之一。数据采集是LabVIEW 的核心技术之一, 也是LabVIEW 与其他编程语言相比的优势所在。使用LabVIEW 的DAQ 技术,可以编写出强大的DAQ 应用软件。NI 公司生产的系列数据采集卡借助LabVIEW 内部的DAQ 库的驱动,可以在LabVIEW环境下运行。但由于NI 公司的采集卡价格比较昂贵,但是选择第三方的数据采集卡, 就需要解决LabVIEW 与非NI 数据采集卡的兼容和驱动的问题。 2 LabVIEW 调用外部程序代码的途径之一———动态链接库机制 LabVIEW 具有强大的外部接口能力, 可以实现LabVIEW与外部的应用软件, C 语言, Windows API 以及HiQ 等编程语言之间的通信, 在LabVIEW 中可用的外部接口包括:DDE,CIN,DLL,MATLAB Script 以及HiQ Script 等。合理地使用这些接口,充分利用其他软件的功能, 弥补LabVIEW 自身的不足, 可以编 写出功能更加强大的LabVIEW应用软件。 动态链接库(Dynamic Link Libraries,简称DLL)是一个可执行模块, 但不接受任何消息, 所以并不可以直接运行, 只是提供一群函数供Windows 应用程序或其他的动态链接函数库调用。动态链接库只有在别的模块中调用了它的某个函数以后才发生作用。由于动态链接库在应用程序运行期间被连接起来的,故称为动态链接库。动态链接库(DLL)一直是基于Windows 程序设计的一个非常重要的组成部分。DLL 是一种基于Windows的程序模块, 它可以在运行时刻被装入和连接。为了实现LabVIEW对普通数据采集卡的支持, 用户可以使用LabVIEW 提供的调用库函数节点CLF (Call Library Function)和代码接口节点CIN(Code Interface)将编程灵活的C 语言和直观方便的LabVIEW程序结合起来。但是比较调用库函数节点CLF 和代码接口节点CIN 这两种方法, 使用CLF 节点访问动态链接库DLL 更具优势:首先, DLL 是外部模块, 自行开发一个DLL 比使用CIN 节点易于实现且便于维护。其次, CIN
LabView数据采集
第一节概述 LabVIEW的数据采集(Data Acquisition)程序库包括了许多NI公司数据采集(DAQ)卡的驱动控制程序。通常,一块卡可以完成多种功能 - 模/数转换,数/模转换,数字量输入/输出,以及计数器/定时器操作等。用户在使用之前必须DAQ卡的硬件进行配置。这些控制程序用到了许多低层的DAQ驱动程序。本课程需要一块安装好的DAQ卡以及LabVIEW开发系统。 数据采集系统的组成: DAQ系统的基本任务是物理信号的产生或测量。但是要使计算机系统能够测量物理信号,必须要使用传感器把物理信号转换成电信号(电压或者电流信号)。有时不能把被测信号直接连接到DAQ卡,而必须使用信号调理辅助电路,先将信号进行一定的处理。总之,数据采集是借助软件来控制整个DAQ系统–包括采集原始数据、分析数据、给出结果等。
上图中描述了插入式DAQ卡。另一种方式是外接式DAQ系统。这样,就不需要在计算机内部插槽中插入板卡,这时,计算机与DAQ系统之间的通讯可以采用各种不同的总线,如USB,并行口或者PCMCIA等完成。这种结构适用于远程数据采集和控制系统。 模拟输入: 当采用DAQ卡测量模拟信号时,必须考虑下列因素:输入模式(单端输入或者差分输入)、分辨率、输入范围、采样速率,精度和噪声等。单端输入以一个共同接地点为参考点。这种方式适用于输入信号为高电平(大于一伏),信号源与采集端之间的距离较短(小于15英尺),并且所有输入信号有一个公共接地端。如果不能满足上述条件,则需要
使用差分输入。差分输入方式下,每个输入可以有不同的接地参考点。并且,由于消除了共模噪声的误差,所以差分输入的精度较高。 输入范围是指ADC能够量化处理的最大、最小输入电压值。DAQ卡提供了可选择的输入范围,它与分辨率、增益等配合,以获得最佳的测量精度。 分辨率是模/数转换所使用的数字位数。分辩率越高,输入信号的细分程度就越高,能够识别的信号变化量就越小。下图表示的是一个正弦波信号,以及用三位模/数转换所获得的数字结果。三位模/数转换把输入范围细分为23或者就8份。二进制数从000到111分别代表每一份。显然,此时数字信号不能很好地表示原始信号,因为分辩率不够高,许多变化在模/数转换过程中丢失了。然而,如果把分辩率增加为16位,模/数转换的细分数值就可以从8增加到216即65536,它就可以相当准确地表示原始信号。
运动控制卡简介
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
labview声音采集系统
虚拟仪器技术 姓名:史昌波 学号:2131391 指导教师:孙来军 院系(部所):电子工程学院专业:控制工程
目录 1、前言 (2) 2、声卡的硬件结构和特性 (3) 2.1声卡的作用和特点 (3) 2.2声卡的构造 (4) 3、LABVIEW中与声卡相关的函数节点 (5) 4、LABVIEW程序设计 (6) 4.1程序原理 (6) 4.2程序结构 (6) 4.3结果分析 (8) 5、结束语 (10) 6、参考文献 (10)
基于声卡的数据采集与分析 1、前言 虚拟仪器技术是利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用。在虚拟仪器系统中,硬件解决信号的输入和输出,软件可以方便地修改仪器系统的功能,以适应不同使用者的需要。其中硬件的核心是数据采集卡。目前市售的数据采集卡价格与性能基本成正比,一般比较昂贵1。 随着DSP(数字信号处理)技术走向成熟,计算机声卡可以成为一个优秀的数据采集系统,它同时具有A/D和D/A转换功能,不仅价格低廉,而且兼容性好、性能稳定、灵活通用,驱动程序升级方便,在实验室中,如果测量对象的频率在音频范围,而且对指标没有太高的要求,就可以考虑使用声卡取代常规的DAQ设备。而且LABVIEW中提供了专门用于声卡操作的函数节点,所以用声卡搭建数据采集系统是非常方便的2。 2、声卡的硬件结构和特性 2.1声卡的作用和特点 声卡的主要功能就是经过DSP(数字信号处理)音效芯片的处理,进行模拟音频信号的与数字信号的转换,在实际中,除了音频信号以外,很多信号都在音频范围内,比如机械量信号,某些载波信号等,当我们对这些信号进行采集时,使用声卡作为采集卡是一种很好的解决方案。 声卡的功能主要是录制与播放,编辑与合成处理,MIDI接口三个部分3。(1)录制与播放
数据采集之LabVIEW温度采集与分析案例
数据采集之温度采集与分析案例 可以照着图学习制作 文章后面有整体程序框图,可以完全据图画出 系统功能: 1.虚拟温度产生A 通过产量产生两组基础虚拟正弦温度值并且添加不同的杂信温度信号到虚拟的温度数据中 A B D C E
2.虚拟温度时时显示B 将两组温度波形数据组合成数组并接入波形图表显示 3.虚拟温度数据范围的时时判断与报警显示C 根据产生的虚拟温度设定上下限并通过比较函数并通过布尔控件显示 4.虚拟温度数据时时滤波D 通过EXPRESS的滤波函数滤波虚拟的温度数据 5.虚拟温度实时计算温度相关值E 通过波形函数库获得均方根值以及两组波形的相位差 6.虚拟温度间断采集显示 另外建立一个循环固定间隔时间采集G与显示H G H A
通过间隔时间选择采集的数据并添加到数据数组并显示到波形 7.虚拟温度间断采集数据的保存 判断是否保存数据通过写入execl函数写入文件 8.对采集的温度数据回放 清除波形数据再读数据并更新数据到波形
编写的步骤 1.设计主要的前面板 采用选项板设计两个界面一个实时采集温度另一个间隔时间采集温度 2.编辑主程序框图 先构件主循环停止循环按钮 其次虚拟数据然后增加杂信的函数最后添加各种函数工具依次连线
3.编辑间隔时间采集温度程序设置间隔时间波形属性结点 保存数据函数等 列出所用的控件以及函数:1.波形图表 2.选项面板 3.数据常量 4.波形属性结点 5.While 循环 6.FOR 循环 7.条件结构 8.杂信函数 9.数据显示控件 10.数据分析函数 11.等等其他各种
程序整体图 虚拟温度测试.vi 虚拟数据产生 快捷函数信号滤波设置
凌华采集卡labview下操作步骤
凌华采集卡labview下操作步骤演示 首先保证安装的两个驱动版本是最新版驱动程序 1.正确安装DAQPilot(V 2.2.0.0125)和DAQMaster,前者是驱动程序和程序部分,后者主 要功能是管理软件用来设置板卡的设备号。 2.在安装好板卡及以上驱动程序后,到设备管理器里确认安装的采集卡上没有感叹号或问 号,如果有更新下驱动程序。 3.DAQPilot下有两种编程方式: a)使用Express VI编写测试程序(无需使用DAQMaster),只需打开程序,然后按照 以下图示操作。 然后选择你要控制的功能 比如7233是一块全数字量输入卡 我们就选择\Program Files\ADLINK\Samples\LabVIEW\Express\Digital Input文件夹下 点击如下应用程序
选择如下图显示程序框图 可以看到程序面版如下
然后双击中间的模块如下: 点击Modify进行配置类似如下示图
然后一直点击Next,直到Finish 然后点击labview环境运行按钮,数据就会出现在前面板的表格里。b)使用Polymorphic VI编写程序,需要首先配置DAQMaster,操作如下图: 点击打开后,还需点击几个图标
左上角的展开图标和带红色字母A的图标就会显示主机里安装的所有板卡了,我的电脑里没有板卡,所以只显示了一个虚拟设备,且设备号是Dev0,此设备号就是我们需要为板卡设置的,我们在Dev0上右键点击选择Edit,出现如下图 假如我们机器里差了块7233我们可以重新起个名字例如Dev1.然后点击确定。此时DAQMaster工作就做玩了。 我们打开测试程序
YAMAHA贴片机各种控制板卡介绍
YAMAHA贴片机各种控制板卡介绍 Mother Board Mother Board将所有的控制器通过ISA-Bus(电源和信号)连接在一起,同时具备有AC&DC电压检查功能,它检查AC输入(从100V转换成12V)和DC输入(5V, +12V, -12V),并且用LED来显示电压低或电源其他错误。 Servo Board Servo Board用来控制贴片机的伺服马达,如果Servo Board检测到错误,绿色LED会不亮并且机器会进入急停状态。 如果机器软件运行正常,黄色LED会闪亮,状态如下:初始化前4秒(亮2秒,灭2秒),初始化后1秒(亮0.5秒,灭0.5秒)(XG,X,II系列机器) 如果编码器线断,红色LED灯会亮。 System Board 符合PICMG标准 影像功能支持LCD/CRT显示器 支持标准接口(1个键盘,1个鼠标,串口,并口,E-IDE接口,软驱接口和USB接口)。 Driver Board Driver Board 受Servo Board 控制,向伺服马达提供动力,1个Driver Board最大可以驱动7个交流伺服马达。 D.power assy.
D.power assy. 向Driver Board提供直流+282V电压 检测电压变化,电源缺相和高温。 Appl Board Appl Bord 和其他一些I/O板(Head Board和CONV Board)一起来控制串行通信。 Vision Board Vision Board 用来识别处理吸取后的元件,PCB板上的MARK并计算位置和方向。 最多可接3个模拟I/F相机和3个数字I/F相机。 I/O conveyor Unit I/O conveyor Unit 包括2块板,用来处理传送部分数字输入输出信号。 I/O BOARD CONVEYOR ASSY (KM5-M4582-xxx) I/O BOARD CORE ASSY (KM5-M4560-1xx) Connection board kit Connection board kit用来控制传送带马达,提供DC24V 用在紧急停止状态中。用LED显示急停情况,详细含义参考Emergency stop state check list I/O Head assy. I/O Head assy.用来处理贴片机头部的数字输入,输出信号。 包括两块块: I/O BOARD HEAD ASSY (KV8-M4572-00x) I/O BOARD CORE ASSY (KM5-M4560-1xx)
基于Labview的声音信息采集与处理
实验四基于L a b V I E W的声音数据采集一、背景知识 在虚拟仪器系统中,信号的输入环节一般采用数据采集卡实现。商用的数据采集卡具有完整的数据采集电路和计算机借口电路,但一般比较昂贵,计算机自带声卡是一个优秀的数据采集系统,它具有A/D和D/A转换功能,不仅价格低廉,而且兼容性好、性能稳定、通用性强,软件特别是驱动程序升级方便。如被测对象的频率在音频范围内,同时对采样频率要求不是太高,则可考虑利用声卡构建一个数据采集系统。 1.从数据采集的角度看声卡 声卡的作用 从数据采集的角度来看,声卡是一种音频范围内的数据采集卡,是计算机与外部的模拟量环境联系的重要途径。声卡的主要功能包括录制与播放、编辑和处理、MIDI 接口三个部分。 声卡的硬件结构 图1是一个声卡的硬件结构示意图。一般声卡有4~5个对外接口。 图1 声卡的硬件结构示意图 声卡一般有Line In 和Mic In 两个信号输入,其中Line In为双通道输入,Mic In仅作为单通道输入。后者可以接入较弱信号,幅值大约为~。声音传感器(采用通用的麦克风)信号可通过这个插孔连接到声卡。若由Mic In 输入,由于有前置放大器,容易引入噪声且会导致信号过负荷,故推荐使用Line In ,其噪声干扰小且动态特性良好,可接入幅值约不超过的信号。 另外,输出接口有2个,分别是Wave Out和SPK Out。Wave Out(或Line Out)给出的信号没有经过放大,需要外接功率放大器,例如可以接到有源音箱;SPK Out 给出的信号是通过功率放大的信号,可以直接接到喇叭上。这些接口可以用来作为双通道信号发生器的输出。 声卡的工作原理 声音的本质是一种波,表现为振幅、频率、相位等物理量的连续性变化。声卡作为语音信号与计算机的通用接口,其主要功能就是将所获取的模拟音频信号转换为数字信号,经过DSP音效芯片的处理,将该数字信号转换为模拟信号输出。输入时,麦克风或线路输入(Line In)获取的音频信号通过A/D转换器转换成数字信号,送到
(完整版)基于Labview的声音信息采集与处理
实验四基于LabVIEW的声音数据采集 一、背景知识 在虚拟仪器系统中,信号的输入环节一般采用数据采集卡实现。商用的数据采集卡具有完整的数据采集电路和计算机借口电路,但一般比较昂贵,计算机自带声卡是一个优秀的数据采集系统,它具有A/D和D/A转换功能,不仅价格低廉,而且兼容性好、性能稳定、通用性强,软件特别是驱动程序升级方便。如被测对象的频率在音频范围内,同时对采样频率要求不是太高,则可考虑利用声卡构建一个数据采集系统。 1.从数据采集的角度看声卡 1.1声卡的作用 从数据采集的角度来看,声卡是一种音频范围内的数据采集卡,是计算机与外部的模拟量环境联系的重要途径。声卡的主要功能包括录制与播放、编辑和处理、MIDI接口三个部分。 1.2声卡的硬件结构 图1是一个声卡的硬件结构示意图。一般声卡有4~5个对外接口。 图1 声卡的硬件结构示意图 声卡一般有Line In 和Mic In 两个信号输入,其中Line In为双通道输入,Mic In仅作为单通道输入。后者可以接入较弱信号,幅值大约为0.02~0.2V。 声音传感器(采用通用的麦克风)信号可通过这个插孔连接到声卡。若由Mic In 输入,由于有前置放大器,容易引入噪声且会导致信号过负荷,故推荐使用Line In ,其噪声干扰小且动态特性良好,可接入幅值约不超过1.5V的信号。 另外,输出接口有2个,分别是Wave Out和SPK Out。Wave Out(或Line
Out)给出的信号没有经过放大,需要外接功率放大器,例如可以接到有源音箱;SPK Out给出的信号是通过功率放大的信号,可以直接接到喇叭上。这些接口可以用来作为双通道信号发生器的输出。 1.3声卡的工作原理 声音的本质是一种波,表现为振幅、频率、相位等物理量的连续性变化。声卡作为语音信号与计算机的通用接口,其主要功能就是将所获取的模拟音频信号转换为数字信号,经过DSP音效芯片的处理,将该数字信号转换为模拟信号输出。输入时,麦克风或线路输入(Line In)获取的音频信号通过A/D 转换器转换成数字信号,送到计算机进行播放、录音等各种处理;输出时,计算机通过总线将数字化的声音信号以PCM(脉冲编码调制)方式送到D/A 转换器,变成模拟的音频信号,进而通过功率放大器或线路输出(Line Out)送到音箱等设备转换为声波。 1.4声卡的配置及硬件连接 使用声卡采集数据之前,首先要检查Line In 和Mic In的设置。如图2,打开“音量控制”面板,在“选项”的下拉菜单中选择“属性”,得到如图3的对话框,在此对话框上选择“录音”,并配置列表中的选项即可。可以通过控制线路输入的音量来调节输入的信号的幅度。 图2 音量控制面板
PCI1010运动控制卡使用说明书
PCI1010运动控制卡 硬件使用说明书 北京阿尔泰科技发展有限公司
目录 一.特点 (2) 二.规格 (2) 三.概述 (4) 四.布局图 (5) 五.使用说明 (5) 5.1 安装 (5) 5.2 通用输入口接线方式 (5) 5.3 驱动程序的安装 (6)
一.特点 ?32位PCI总线接口,即插即用 ?2轴伺服/步进电机控制,每轴可独立控制,互不影响 ?脉冲输出的频率误差小于0.1% ?脉冲输出速度最高可达到4 MHz ?可选择脉冲输出模式:CP/DIR, CW/CCW ?非对称直线加/减速驱动 ?梯形与S曲线速度轮廓 ?2轴直线插补、圆弧插补、模式插补、连续插补 ?固定线速度控制 ?多轴同步启动/停止 ?可编程控制加速与减速时间 ?在运动中改变输出脉冲数或驱动速度 ?运动中可以实时读出逻辑位置、实际位置、驱动速度、加速度、加/减速状态(加速中、定速中、减速中) ?每轴都有2 个32位比较寄存器用于逻辑位置计数器或者实际位置计数器的位置大小比较,可用于软件限位。 ?可接收伺服马达驱动器的各种信号,如硬件限位信号、到位信号、报警信号等 ?32位递增/递减计数器用于附加编码器 ?可方便地与任意步进电机、AC或DC伺服电机相连接 ?所有数字量输入/输出信号均有2500Vrms隔离 二、规格 ?控制轴2轴 ?CPU数据总线长度16位 插补功能 ?2轴直线插补 ●插补范围各个轴-8,388,607~+8,388,607 ●插补速度1~4MPPS ●插补位置精度±0.5LSB以下(在全插补范围内) ?圆弧插补 ●插补范围各个轴-8,388,607~+8,388,607 ●插补速度1~4MPPS ●插补位置精度±1LSB以下(在全插补范围内) ?2轴位模式插补 ●插补速度1~4MPPS(但依靠CPU数据设定时间) ?其他插补功能 ●线速常数●连续插补●步进插补 各轴通用规格 ?驱动输出脉冲(CLK=16MHz时) ●输出脉冲范围 1 ~ 4MPPS ●输出速度精密度±0.1%以下(对设定数值) ●速度倍率1~500 ●S曲线加速度变化率954 ~ 625×106PPS/SEC2 ●加/减速度125 ~ 1×106PPS/SEC ●初始速度 1 ~ 8000PPS (倍率=1的时候)
JUKI-2060各控制板卡的作用
JUKI-2060各控制板卡的作用 一、CPU板 CPU基板是控制整个装置的基板,其它基板通过CPCI母线,接口桥基板,VME总线接口进行连接。二、XMP基板 XMP基板和RMB(JGRMB基板和JHRMB基板)一起动作,是伺服马达和步进马达的控制基板。 XMP基板最多可以控制19轴的马达。 (1)从RMB基板输出16BIT的串行指今信号。控制XY轴ZQ轴的AC伺服马达。 XY轴:用马达的旋转变换器控制速度。计数电磁标尺控制定位。 ZQ轴:用马达的旋转变换器控制位置 (2)从RMB基板输出脉冲指令。控制中心马达。后备马达。自动宽度调马达的步进马达。 (3)检测紧急开关的开放。既时停止XY轴。ZQ轴。 (4)进行各轴原点和限制传感器的检测。 (5)伺服启动,电磁标尺的警报检测。 (6)安装有XY轴。ZQ轴以及后备马达R轴的位置管理用计数器。三、SYNONET连接基板 SYNONET连接基板是JGRMB基板。SAFETY基板。CARRY连接基板以及各马达驱动器。电磁标尺。限制传感器间的信号连接基板。 (1)中转ZY4轴驱动器和XMP基板的信号。其中警报信号由被绝缘处理的图像探头向SAFETY基板输出。 (2)中转电磁标尺和XMP基板的信号。 (3)XY轴的限制信号经JGRMB基板和SAFETY基板输出。 (4)中转中心马达。后备马达。自动宽度调整马达的驱动器和XMP基板的信号(经CARRY 中转基板)四、接口桥基板 接口桥基板与CPCI接口和VME接口连接。是从CPCI向VME存取的基板。 CPCI接口连接的基板:CPU基板。XMP基板。 VME接口连接的基板:SAFETY,LIGHTCTRL,BASE-FEEDER,I/O CTRL,IP-X3,MCM (L),MCM(R)基板。五、MCM基板 本基板是元件中心用传感器(MNLA或FMLA)的控制和演算基板。 主控CPU的I/F,通过VME接口→接口桥基板→CPCI接口路径来进行。MCM基板有控制MNLA用的四轴独立演算电路和控制FMLA用的单轴电路两种结构形式。控制FMLA的MCM基板可以用控制MNLA的MCM基板替代使用。六、SAFETY基板 (1)检测紧急开关,限制传感器,X-SLOW传感器,遮断伺服电源。 (2)(2)检测护罩开关,X-SLO传感器,通知XMP基板。 (3)(3)通过CARRY中转基板的I/F电路,进行基板传送传感器,电磁阀,ATC传感器,电磁阀的信号作业。 (4)(5)安装SMEMA I/F电路。 (5)(6)保存M/S参数的FLASHROM。板的LED亮灯作用以前有说过。七、CARRY 基板 (6)本基板主要是中转传感器的信号。八、BASE-FEEDER 基板 (7)此基板装有供料器推进,温度传感器和真空传送,信号灯的控制,MTC I/F等功能。(8)LED1:CPU正常工作。 2:CPU为HALT。 3:系统为FAIL。故障时2,3 亮灯。九、
电动平移台控制器使用说明
电动工作台控制器说明 ——上海联谊光纤激光器械厂 2009-11-13 1.功能概况 本控制器是一款基于PC机PCI总线的一轴至四轴运动控制器,可以控制本公司一轴到四轴电动工作台,配备功能齐全,提供丰富的运动函数库,可供用户进行PC机运动控制程序二次开发。 主要功能: z可以控制步进电机或伺服电机 z通过PC机,用配套的运动控制软件进行控制(PC机操作系统:Windows 98/ 2000/ XP) z提供加减速设置 z单轴、多轴独立点位运动 z直线插补 z立即运动模式 z反向间隙补偿 z运动速度和轨迹可以编程控制 z可以选配原点开关,进行回原点 z可以选配编码器或者光栅尺进行闭环反馈控制
2.硬件说明 2.1 每套控制器包含以下部件: MPC08运动控制卡、控制箱、板卡连接线(1.8米)、电机控制线(2米)、电源线以及配套控制软件光盘 2.2 硬件安装: a.将控制板卡插到客户自备台式机的PCI插槽内,用螺钉固定在电脑机 箱上。 b.使用板卡连接线,将运动控制卡与控制箱连接好。 c.用电机控制线连接电机和控制箱。 d.将控制箱接上电源,打开控制箱电源通电,即可安装用配套的控制软 件,通过电脑进行电动工作台的运动控制。
3.运动控制软件 3.1软件安装说明: 3.1.1运动控制卡驱动安装说明: 在Windows 98、2000、XP 平台下,由于操作系统支持即插即用,当运动控制卡正确插入PCI插槽,操作系统启动后将会自动检测到PCI 卡,此时可按照以下步骤完成驱动程序、函数库以及示例程序的安装。 1) 系统检测到板卡:MPC08 后会提示找到多媒体视频控制器,此时单击“取消”。 2) 运行安装盘根目录下的MPC08SP 安装程序,跟随安装向导单击“Next”。 3) 单击“Next”。选择安装模块:驱动程序、应用程序(包含函数库和示例 程序),默认情形二者均选中。
凌华工业主板常见问题分析处理
1、电源在AT或ATX之间变换时,主板可能无法开机,需BIOS放电或power switch短接 2、机箱电源一定要接地,否则机箱上会带110V感应电压,电流在1mA之内 3、使用PIII CPU时,需上导热硅脂,否则系统不稳定,易死机 4、带网卡的CPU卡,安装winNT Workstation 4.0,在安装网卡前, 先做如下处理,否则“事件查看器”会出现“存储器空间不足提示” 一、a、进入CMOS,PnP/PCI Configurations PNP OS Installed >[NO] Resources Controlled By > [Manual] 保存重启 b、安装完网卡后,再打一次SP6补丁即可 c、这时CMOS可更改为其它设置 二、或网卡驱动应先于Service Pack来安装.否则有时会不能启动Workstation Service, 并且报错:存储空间不足.出现这种错误时,可以重新安装一下Service Pack 5、主板不开机,换BIOS或检查电池电量、CMOS放电 检查电源PG、5VSB+0.01V 6、KB、MS线最长5米,HDD IDE线最长75cm(标准45mm)。nupro760LV可以支持到20米KB、MS延长线 7、CPU卡直接使用LCD时,在系统关机时LCD屏闪动历害, 可把屏幕“刷新频率”设高为:75或85Hz 8、主板带两个网口时使用WinNT4.0+SP6.0时,网络要设置为两个网段, 与其相连的机器也要设置为两个网段。否则网口只能使用一个。 9、主板安装OS过程死机,除主板、内存及HDD外,也可能是CPU坏或HDD线坏 如果是安装win2000出现*.DLL文件无法复制,先考虑内存坏,依次光盘、CDROM、HDD 10、win98 SE无法关机或不能重启 a、BIOS配置不正确。 在PnP/PCI Configurations选项中,有一项Assign IRQ VGA, 如果你装的是Win98SE版本,关不了机,跟这个选项可能有关,要把它打开 b、打win98简体关机补丁 c、msconfig中“禁用快速关机” win98或win98SE开始不能安装或过程中死机 A、如无软驱,可增加一个软驱 B、BIOS中软驱设置为无 11、在使用ATX电源时,也可当AT电源使用,但效果可能会不好,最好不要使用。 12、使用AT电源时,开关间隔需6秒。使用ATX电源时,电源开关间隔需3-5秒。 13、采用ATX电源时,BIOS中设置延时4秒,在OS(win98/2000)中无效, 因OS启动后,其管理电源工作,故不能延时关机,而是立即关闭程序后关机 14、AWDFlash 强制更新BIOS,要加/F 参数 15、USB光驱,带启动功能时,会挑启动盘
PCI运动控制卡快速入门手册
PCI-运动控制卡-快速入门手册
————————————————————————————————作者:————————————————————————————————日期:
PCI-1240快速入门手册 目录 第一章PCI-1240 安装 1.1 1.2 PCI-1240 Driver 与Utility 安装PCI-1240 硬件安装 第二章PCI-1240 与驱动器接线 2.1 PCI-1240 针脚描述 2.2 PCI-1240 与驱动器连接 第三章PCI-1240 测试 3.1 PCI-1240 Utility 使用 第四章PCI-1240 软件编程 4.1 PCI-1240 软件编程 第五章附录 1. PCI-1240 Utility 界面说明:
第一章PCI-1240安装 1.1 PCI-1240 Driver与Utility安装 在使用pci-1240 之前必须安装pci-1240 驱动,驱动安装步骤: A) 将研华提供的驱动光盘置于光驱中,出现如下画面: B) 点击Installation 选项,出现如下画面: C) 点击Individual Driver,出现如下画面:
动;
1.2 PCI-1240 硬件安装: 1) PCI-1240 跳线设置: I. BoardID 设置:通过设置板卡上DIP 开关可以设置PCI-1240 的BoardID 从0-15。 II. JP1~8 设置nP+P,nP+N 和nP-P,nP-N 输出引脚为+5v 输出还是差分输出,缺省设置为差分输出;如图所示: 注意:设置为+5v单端输出时,要防止外部噪声窜入PCI-1240. III. JP9 Enable/Disable 紧急停止功能,如图所示: 2) 单块板卡安装: I. 关闭计算机电源; II. 将PCI-1240 卡插在计算机的任一PCI 槽上; III. 重新开启计算机,系统会自动寻找到PCI-1240,根据提示点 击Next 添加PCI-1240 驱动; 3) 多块板卡安装: I. 将板卡的BoardID DIP 开关设置成不同的值(不能有重复); II. 先将一块板卡插在一PCI 槽,根据单块板卡安装方法,添加 驱动;
激光切割机控制板卡
激光机运动控制主板MC-BOARD-V20 MC-BOARD主板具有如下特点及优势: ◆采用高质量24V转5V的DC-DC模块电源对主板内核独立供电,硬件设计时充分考虑了 EMI/EMC问题,因此主板有较强的抗干扰能力; ◆采用高精度32位浮点DSP+FPGA为核心控制器,浮点DSP主频高达300MHZ,可实现复杂的 数据超前预处理算法,FPGA实现脉冲发生器,整个系统运行效率高,机器的运行速度理论上只受限于机器和驱动器本身,而不受限于控制主板的运行速度,可广泛应用于大幅面高速激光雕刻、切割设备; ◆板载64MB大容量NAND-FLASH作为文件存储器,可支持联机和脱机控制模式,用本主板配套 的PC机软件完成机器参数设置、图形编辑和路径优化等(详见本主板PC机软件说明),可立即在PC机上启动加工,也可由PC机生成加工数据文件(后缀为.rd),然后通过U盘COPY 到主板内存中,实现全脱机运行,同时支持将主板内存中的.rd文件拷贝到U盘,可支持U盘的FAT32和FAT16文件格式;
◆主板集成高速切割和精度切割两种切割算法,适用于追求快速切割和追求精度切割的不同用户 群; ◆切割时,通过设置最小功率和最大功率,主板自动寻找能量跟随系数,对切割进行实时能量跟 随,其中最小功率对应切割时的起跳速度,最大功率对应用户设置的目标速度; ◆可实现长度、深度可设置的坡度扫描功能,最小功率对应坡度顶深,最大功率对应坡度底深; ◆完善的激光开关延时功能,最大可设置200ms的开关延时时间; ◆最大可设置30s的激光开/关光停顿打穿时间,可方便用于刀模切割; ◆主板集成数模转换电路,输出激光数字PWM的同时将其转换为模拟信号,可直接控制数字激光 电源和模拟激光电源; 相比于MC-BOARD主板,MC-BOARD-V2.0增加了如下功能: ● 完善的断电续雕功能,无论在高速运动或者低速运动过程中系统断电,第二次上电时若用户选择 了断电续雕功能,则图形都能实现良好对接; ● 可在工作过程中在线修改最大、最小功率和加工速度,可方便用户在调试时找到一个合适的激光 功率和加工速度参数,同时修改的参数只对正在运行的图层起作用,不影响其他图层; ● 可在键盘上直接进行白边距离可设置的走边框操作,走边框的模式分为开光切边框、关光走边框 及四角打点走边框三种模式; ● 新增了点动距离可设置的手动移动功能,当点动距离为0时,按键移轴时进行连续移动,若点动 距离不为0,则每按一次移动键,对应轴移动所设置的点动距离值; ● 键盘上设置的最大最小功率值精确到0.1%,速度值不再以百分比表示,而是直接以mm/s的形 式给出。
USBCNC四轴控制板使用手册
USBCNC接口板使用手册 (V1.0 )
第一章概述 (3) 1.1产品介绍 (3) 1.2图片展示 (4) 第二章板卡使用说明 (5) 2.1尺寸 (5) 2.2详细说明 (5) 第三章4:软件安装与使用 (8) 3.1软件安装 (8) 3.2软件注册 (16) 3.3常用设置 (20) 3.4软件使用 (29) 3.5使用注意事项 (32)
第一章概述 1.1 产品介绍 USB6560T4是本工作室新推出的4轴控制器,产品是为满足广大雕刻机DIY爱好者需求推出的经济型步进电机驱动器套件。 优点特性: l4轴一体,USB接口,简单方便。 l可外接8路限位开关(每个方向上限下限各一路),此特点优于mach3。 l可外接手控盒,手控可脱机工作,即不插电脑也能独立工作,方便对刀的时候调节坐标。 l外扩3路程序可控继电器信号,分别可以作为主轴启停、水冷及雾冷开关。 本产品操作简单易懂,方便DIY爱好者使用。但因为是通过USB控制,所以软件安装方面需要谨慎仔细,请用户严格按照说明要求顺序安装需要的软件。
1.2 图片展示 图1
第二章板卡使用说明 2.1 尺寸 图2 成品长宽74*50mm,高度30mm。 共有4个接口,分别是USB接口,DB9接口和2个16P牛角座接口。 2.2 详细说明 如图2所示,各模块定义如下: 1:USBPROT INPUT,是USB输入接口,即通过该接口与电脑连接通信。请注意使用带屏蔽
和磁环的USB2.0连接线,线长尽量不要超过2米。 2:MANUAL CONTROL PROT,是手控接口,手控接口定义如下表。 DB9引脚 1 2 3 4 5 定义公共端A轴顺时针Z轴下降Y轴前进X轴左移DB9引脚 6 7 8 9 定义A轴逆时针Z轴上升Y轴后退X轴右移 3:LIMIT PROT,是限位与继电器控制输出接口 IDC16P 1 2 3 4 定义地雾冷水冷主轴 IDC16P 5 6 7 8 定义复位地A轴上限A轴下限 IDC16P 9 10 11 12 定义Z轴上限Z轴下限Y轴上限Y轴下限 IDC16P 13 14 15 16 定义X轴上限X轴下限地地 外扩雾冷水冷和主轴控制继电器接线示意图 对刀与限位接线示意图