基于时空结构的双基MIMO雷达多维参数联合估计(双基地MIMO雷达)

第31卷 第6期航 空 学 报
Vo l 31No 6 2010年 6月ACT A A ERON A U T ICA ET A ST RO N AU T ICA SIN ICA June 2010
收稿日期:2009 06 19;修订日期:2009 10 19
基金项目:航空科学基金(2008zc52026);校创新基金通讯作者:刘帅E
mail:liush uai41123@https://www.wendangku.net/doc/4b17641921.html,
文章编号:1000 6893(2010)06 1196
08基于时空结构的双基MIMO 雷达多维参数联合估计
刘帅1,张弓2,刘文波1
(1.南京航空航天大学自动化学院,江苏南京 210016)(2.南京航空航天大学信息科学与技术学院,江苏南京 210016)
Multi dimensional Parameter Joint Estimation of
Bistatic MIMO Radars Based on Temporal spatial Structure
Liu Shuai 1,Zhang Gong 2,Liu Wenbo 1
(1.College o f A uto mation Engineering ,Nanjing U niver sity o f A ero nautics and A stro nautics,Nanjing 210016,China)
ersity of
摘 要:方向(DO A )和离波方向(DO D)题。针对慢动目标,基于含的时间相位差、发射阵列因子,形成旋转不变子空间,题,实现了三维参数
联合估计。该方法在信噪比低、积累脉冲数少时,目标的DO A 与DO D 估计性能比不利用时域特性时有明显改善。仿真结果验证了本方法的有效性。
关键词:双基M IM O 雷达;时空结构;ESP RIT ;波达方向;离波方向中图分类号:V 243.2;T N 957 文献标识码:A
Abstract:Fo r the pur po se o f impro ving the direction o f arr ival (DO A )and dir ection of depart ur e (DO D)esti mation per for mance for a bistatic multiple input multiple output (M IM O)radar by making the best use o f the targ et tempo ral st ructur es,this art icle investigates multi dimensional par ameter joint estimation for bist atic M IM O radar based on a 2 dimensio n tempor al spatial mo del.Fo r slo wly mov ing tar gets,a r otational invar iant subspace is fo rmed w hich is based on t he multi dimensional estimatio n of signal parameter s by rot ational invar i ance techniques (ESPR IT )by means of the ro tatio nal factor s pr oduced by the phase shifts due to the adjacent delays in the t ime do main and the adjacent transmitting and receiving o f ar ray elements r espectively,and the par ameter matching is so lved acco rding to the tripar tite r elatio nships among the matr ix ,the eigenvalue o f the matrix and the eig env ecto r o f the co rr esponding eigenvalue.T hen the 3D par ameter joint estimation is imple mented.T he method outper for ms the conventional ESPR IT method w hich does no t make use o f signal tempo r al str ucture in the case of less accumulative pulses and lo w singal to no ise r atio (SN R).Simulat ion results pr ove the va lidity of the method.
Key words:bistatic M IM O r adar ;temparal spatia l model;ESPRI T ;direction o f ar rival;directio n of depar tur e
2004年E Fishler 等[1]提出了多输入多输出(M IMO)雷达的概念。依据不同的天线配置,MIM O 雷达模型可以大体分为两大类: M IM O
雷达模型,发射和接收阵列天线阵元间距较小,利用灵活的发射分集设计[2],获得高分辨率的空间
谱估计性能[3 4]; M IMO 雷达模型的发射阵列的阵元间距较大,利用空间分集技术对抗目标的雷达散射截面(RCS)起伏[5]
。在第 类模型中,
接收阵列有两种不同的设置:如果接收阵列的阵元间距较大,那么可以获得在接收端的空域分集增益;如果接收阵列的阵元间距较小,则可以实现相干处理。MIMO 雷达概念及其相关的阵列信号处理技术受到了各国学者越来越多的关注[2 13]。
第6期刘帅等:基于时空结构的双基M IM O雷达多维参数联合估计
第 类MIM O雷达使用多个天线同时发射独立波形。由于不同位置的目标回波彼此线性独立,因此能获得较好的空间分辨率和抗干扰能力。针对第 类M IM O雷达参数估计,文献[2]和文献[4]提出了波束形成算法,包括Capon、幅度相位估计(Am plitude and Phase Estimation, APES)算法以及结合了两者优点的CAPES方法。针对接收端阵列校准误差,文献[4]推导了稳健的Capon方法(Ro bust Capon Beamform er, RCB)和具有双约束条件的稳健Capon方法(Do ubly Constrained Robust Capo n Beamform er,DCRCB),获得了较好的估计性能。文献[8]借鉴文献[7]中常规RCB方法的设计思想,推导了M IM O雷达稳健的A PES方法。针对双基MIM O雷达,文献[9]应用经典的Capon方法实现了雷达波达方向(DOA)和离波方向(DOD)的联合估计;文献[10]提出了基于二维旋转不变技术信号参数估计(ESPRIT)方法的DOA和DOD 估计;文献[11]提出了一种自动配对的ESPRIT 方法实现了DOA与DOD的联合估计。
针对慢动目标,文献[9]忽略了目标的多普勒效应;文献[10]和文献[11]虽然在信号模型里考虑到目标的多普勒频率,但在DOA和DOD参数估计处理中仅利用了信号的空域信息。目标的多普勒频率影响目标反射回波的相位,造成双基MIM O雷达DOA与DOD估计性能的下降。文献[12]分析了双基多载频M IMO雷达的目标运动参数速度与加速度的估计。文献[13]分析了MIM O雷达对目标径向速度的估计性能。针对慢动目标,本文探讨了双基M IM O雷达在时 空模型下的多维参数联合估计问题。
本文基于多维ESPRIT算法,同时利用时域相邻两级延迟包含的时间相位差、发射阵列相邻阵元包含的空间相位差以及接收阵列相邻阵元包含的空间相位差作为旋转因子,形成旋转不变子空间,再根据各旋转不变的矩阵对具有相同的特征向量解决了参数配对问题,实现了三维参数联合估计。仿真结果验证了本文方法的有效性。
1 双基M IM O雷达时 空信号模型
假设目标是慢起伏的,少数几个脉冲回波内认为目标不起伏。将脉冲划分成若干小段,每段内认为RCS恒定,而段间有起伏。
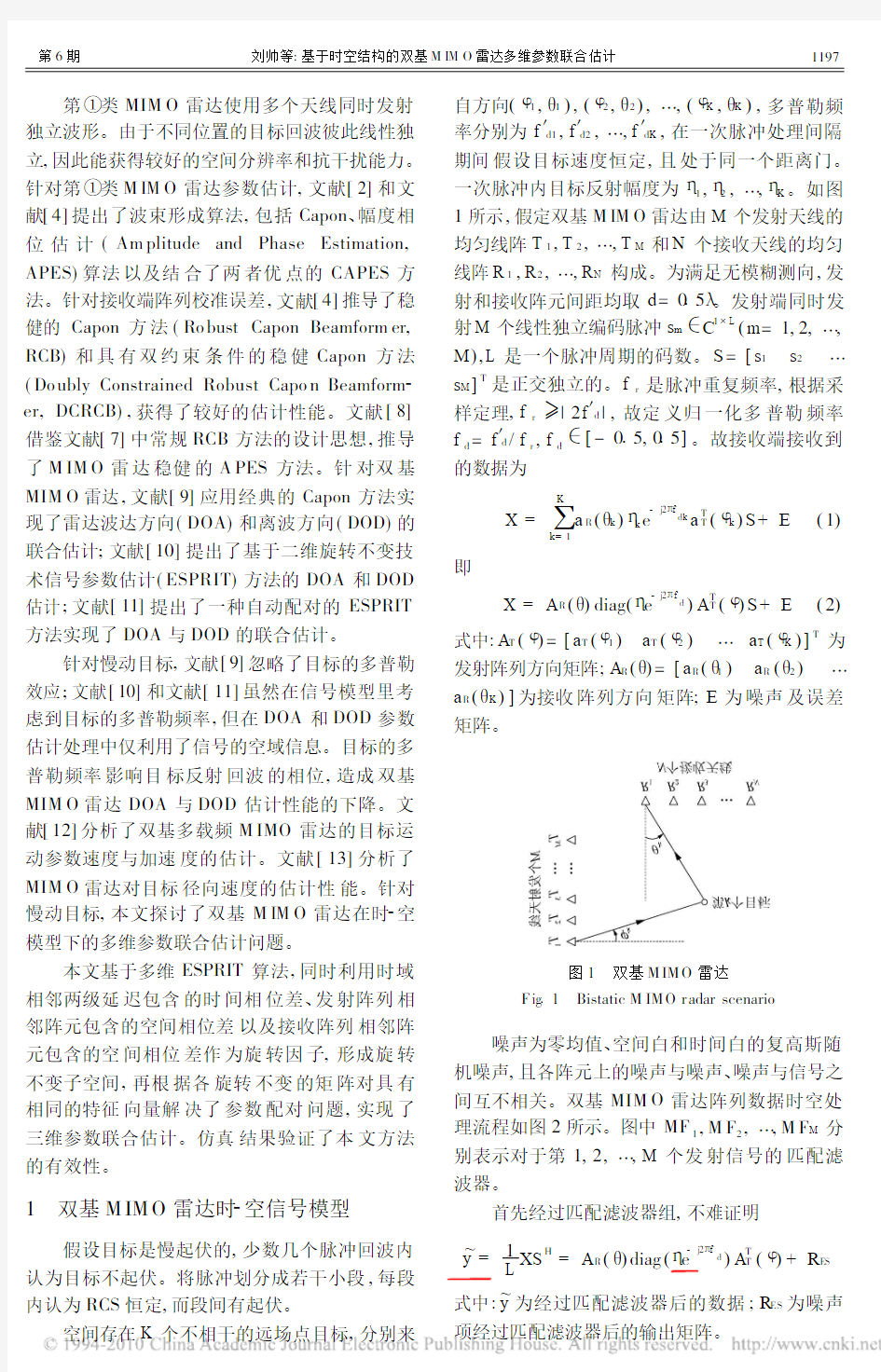
空间存在K个不相干的远场点目标,分别来自方向( 1, 1),( 2, 2),!,( K, K),多普勒频率分别为f?d1,f?d2,!,f?d K,在一次脉冲处理间隔期间假设目标速度恒定,且处于同一个距离门。一次脉冲内目标反射幅度为1,2,!,K。如图1所示,假定双基M IM O雷达由M个发射天线的均匀线阵T1,T2,!,T M和N个接收天线的均匀线阵R1,R2,!,R N构成。为满足无模糊测向,发射和接收阵元间距均取d=0 5!。发射端同时发射M个线性独立编码脉冲s m#C1?L(m=1,2,!, M),L是一个脉冲周期的码数。S=[s1 s2 ! s M]T是正交独立的。f r是脉冲重复频率,根据采样定理,f r%|2f?d|,故定义归一化多普勒频率f
d
=f?d/f
r
,f
d
#[-0 5,0 5]。故接收端接收到的数据为
X=&K k=1a R( k)k e-j2?f d k a T T( k)S+E(1)即
X=A R( )diag(e-j2?f d)A T T( )S+E(2)式中:A T( )=[a T( 1) a T( 2) ! a T( K)]T为发射阵列方向矩阵;A R( )=[a R( 1) a R( 2) !
a R( K)]为接收阵列方向矩阵;E为噪声及误差矩阵。
图1 双基M IM O雷达
F ig 1 Bistatic M IM O r adar scenario
噪声为零均值、空间白和时间白的复高斯随机噪声,且各阵元上的噪声与噪声、噪声与信号之间互不相关。双基MIM O雷达阵列数据时空处
理流程如图2所示。图中MF
1
,M F
2
,!,M F M分别表示对于第1,2,!,M个发射信号的匹配滤波器。
首先经过匹配滤波器组,不难证明
y=1
L
XS H=A R( )diag(e-j2?f d)A T T( )+R ES
式中:y为经过匹配滤波器后的数据;R ES为噪声项经过匹配滤波器后的输出矩阵。
1197
航 空 学 报
第31卷
图2 M IM O 雷达时空处理框图
Fig 2 T empor al spatial processing fo r M IM O radar
将 y 的列依次排为一列y =vec ( y ),对y 进行时域延迟抽头采样,#表示数据延迟,取#=1/f r ,共有
P 级,每一级接收的数据为 Y p =[y p 11
y p
12
!y pMN ]T (p =1,2,!,P)
将 Y 的列依次排成一列Y =v ec ( Y ),Y #C PMN ?1,则Y 中的元素y pmn 为第m 个发射天线对第n 个接收天线响应数据的第p 级延迟。
y pmn =&K
k=1
k
e
[-j2?(m-1)d /!]sin
k
?
e
-j2?(p-1)f
d k
e
[-j2?(n -1)d/!]sin
k
+v pmn
式中:v pmn 为第m 个发射天线对第n 个接收天线的噪声项的第p 级延迟。
故时空数据Y 可表示为Y =
&K
k=1
k
b (f
d k
)!(a T (
k )!a R ( k ))+v (3)
式中:b (f d k )=[1
e
-j2?f
d k
!e
-j2?(P -1)f
d k
]T
;
v 为噪声项;!为Kronecker 积,M IMO 雷达相当
于一个阵元数为MN 的虚拟线阵[9],故该虚拟线阵的空域方向矩阵为A S =[a 1
a 2
!a K ],其
中空域导向矢量a k =a T ( k )!a R ( k )
时域(方向)矩阵为B T =[b (f d1)
b (f d2)
!b (f d K )] 时空联合方向矩阵为
W =[w 1
w 2
!w K ]
w k =b (f d k )!(a T ( k )!a R ( k )) 接下来的任务就是根据时空数据Y ,估计K 个目标的位置( k , k )和多普勒频率f d k ,k =1,2,!,K 。
2 多维ESPRIT 算法
多维ESPRIT 算法根据阵列结构构造多个旋转不变结构,将多维参数估计分解为多个一维ESPRIT 算法,分别估计每一维的参数,再通过参数配对获得多维参数的联合估计。多维ESPRIT 算法省去了耗时的多维谱峰搜索问题,因而时效性更好。
2 1 多维ESPRIT 算法的基本原理
多维ESPRIT 算法实现双基M IMO 雷达DOA 、DOD 和多普勒频率的联合估计,其基本思想是同时利用时域相邻两级延迟包含的时间相位差、发射阵元相邻阵元包含的空间相位差以及接收阵元包含的空间相位差作为旋转因子,形成旋转不变子空间。
时空数据的协方差矩阵为R =E (YY H ),对R 进行特征值分解,U S 为K 个大特征值{!1,!2,!,!K }对应的特征矢量张成的信号子空间。无噪声情况下,或当快拍数趋于无穷情况下,满足U S =W T 。U S 和W 均为列满秩,因此T 为非奇异矩阵。定义
W D1=
b 1(f d1)!(a T ( 1)!a R ( 1))
b 1(f d2)!(a T ( 2)!a R ( 2))
?
b 1(f d K )!(a T ( K )!a R ( K ))T
W D2=
b 2(f d1)!(a T ( 1)!a R ( 1))
b 2(f d2)!(a T ( 2)!a R ( 2))
?
b 2(f d K )!(a T ( K )!a R ( K ))T W T 1=
b (f d1)!(a T1( 1)!a R ( 1))
b (f d2)!(a T1( 2)!a R ( 2))?
b (f d K )!(a T1( K )!a R ( K ))T W T 2=
b (f d1)!(a T2( 1)!a R ( 1))
b (f d2)!(a T2( 2)!a R ( 2))?
b (f d K )!(a T2( K )!a R ( K ))T f
d1)!(a T ( 1)!f
d2
)!(a T ( 2)!?
f d K )!(a T ( K )!1198
第6期刘帅等:基于时空结构的双基M IM O雷达多维参数联合估计
W R2=b(f d1)!(a T( 1)!a R2( 1))
b(f d2)!(a T( 2)!a R2( 2))
?
b(f d K)!(a T( K)!a R2( K))
T
式中:b1(f
d k )和b2(f
d k
)分别为b(f
d k
)的前P-1
个和后P-1个元素;a T1( k)和a T2( k)分别为a T( k)的前M-1个和后M-1个元素;a R1( k)和a R2( k)分别为a R( k)的前N-1个和后N-1个元素。存在旋转变换
W D2=W D1%D,W T2=W T1%T,W R2=W R1%R 式中:
%
D
=diag(e-j2?f d1,e-j2?f d2,!,e-j2?f d K)
%T=diag(e(-j2?d/!)sin 1,e(-j2?d/!)sin 2,!,
e(-j2?d/!)sin K)
%R=diag(e(-j2?d/!)sin 1,e(-j2?d/!)sin 2,!,
e(-j2?d/!)sin K)
令U S_D1、U S_D2、U S_T1、U S_T2、U S_R1和U S_R2是由U S按相同的方法生成的子矩阵,同理U S_D2=
U S_D1&
D ,U S_T2=U S_T1?
T
,U S_R2=U S_R1?
R
,不难推
导,?
D
=T-1%D T,?T=T-1%T T,?R=T-1%R T。
?D、?T、?R是%D、%T、%R的相似变换矩阵。%D、%T、%R的对角元素就是?D、?T、?R的特征值(D、(T、(R。
(D k=e-j2?f d k
(T k=e(-j2?d/!)sin k
(R k=e(-j2?d/!)sin k
(4) 实际情况下,对?D、?T和?R分解得到的特
征值并不是一一对应的。
2 2 配对方法
文献[14]中利用了特征值比值的方法进行多维参数的自动配对,文献[15]根据各旋转不变的矩阵对具有相同的特征向量,提出了一种二维ESPRIT算法参数配对新方法。本文将文献[15]的思想应用到双基M IM O雷达的三参数配对。
对?D进行特征值分解,对应于第k个目标的特征值及特征值对应的特征向量分别为(D k和V k。由于?D和?T具有相同的特征向量,则V k
也是?
T
的特征值(T k对应的特征向量。根据矩阵、矩阵的特征值及特征值对应的特征向量三者之间的关系,有
(T k V k=?
T
V k (k=1,2,!,K)(5) 故只需求出?D的特征值(D k对应的特征向量V k,根据式(5)便可求得(T k,同理求出对应的(R k,此时3组特征值一一对应。
3 仿真实验
假设M=4,N=5,阵元间距d=0 5!,进行P级延迟,P=10,目标反射系数满足)2=1,信噪比SNR=5dB。
3 1 仿真1
目标数K=3,目标方位(-4?,5?)、(0?, -1?)、(-6?,2?),归一化多普勒频率(-0 10,0, 0 05),脉冲数Q=100,M onte Carlo实验次数T=50。结果如图3所示。
1199
航 空 学 报第31卷
图3 仿真结果(K=3;Q=100;SN R=5dB;仿真次数:50次)
Fig 3 R esult s o f50M onte Carlo simulat ions with SN R=5dB,Q=100for three targ ets
图3(a)中图*表示目标的实际时空域位置。图3(b)~图3(d)分别是50次独立仿真中多普勒频率、DOA和DOD的估计结果。可以看出, DOA的估计精度比DOD的估计精度高,这是因为接收天线数比发射天线多,接收孔径大于发射孔径,DOA的分辨率要高于DOD。
3 2 仿真2
仿真2研究了利用多普勒信息后,双基M I M O雷达对邻近目标的参数估计能力,并与不利用时域信息时作了比较。K=3,目标方位为(-20?,40?),(6?,0?),(4?,-1?),归一化多普勒频率为(-0 30,-0 25,0 10)。其中目标2(6?,0?)和目标3(4?,-1?)在空间上靠得很近,其他仿真条件同仿真1。
若不利用信号的时域信息,用二维ESPRIT算法估计出的目标位置为(-20 0852?,39 8876?), (11 3595?,-0 0330?),(5 0160?,-0 5340?),目标1的估计位置是有效的,但目标2和3的估计位置是无效的。
子空间分解类算法中,多重信号分类(Multi ple Signal Classification,M U SIC)算法精度高于ESPRIT算法。从图4可看出,两个目标相隔很近时,纵然估计精度更高的M USIC算法也很难将其分辨出来。若将阵元接收到的信号进行时域延迟抽头采样,利用多维ESPRIT算法,目标估计位置为(-20 0096?,39 9798?),(5 9465?, 0 0015?),(3 9826?,-0 9721?),多普勒频率估值(-0 3002,-0 2502,0 1001)。显然,利用多普勒信息后,本文方法在区分出目标2和3的同时,也使目标1的估计精度也得到了较大程度的提高。
图4 不利用多普勒信息时M U SIC估计图
Fig 4 Spat ial spectr al est imates v ia M U SIC w ithout using Do ppler infor mat ion
3 3 仿真3
仿真3研究了目标方向存在兼并的情况。K=3,目标方位(-20?,0?),(-20?,-15?),(30?, 0?),归一化多普勒频率(-0 30,-0 20,0 25)。其他仿真条件同仿真1。
若不利用时域信息,用二维ESPRIT方法估计目标位置为(-55 5457?,-0 0219?), (-20 1434?,-15 0327?),(7 3022?,-0 0066?),此时目标1和3的估计无效。使用本文ESPRIT 方法,目标估计方位(-19 9834?,-0 0002?), (-20 0108?,-15 0086?),(30 0737?,-0 0173?),多普勒频率估值(-0 2998,-0 2000,0 2497)。
考虑慢动目标在某一时刻相遇,假设目标方位(-20?,0?),(-20?,0?),(30?,-15?),归一化多普勒频率(-0 30,-0 20,0 25)。其他仿真条件同上。
若不利用时域信息,二维ESPRIT方法估计目标空间位置为(-19 7227?,-0 0320?), (-6 6251?,-1 3655?),(29 9528?,-14 9528?),此时目标2的估计无效。用本文方法,目标的空间估计位置为(-19 9788?,-0 0010?), (-20 0234?,-0 0018?),(30 0884?,-14 9635?),多普勒频率估值(-0 3001,-0 2002,0 2498)。
目标存在角度兼并时,本文方法仍然能够估计出DOA与DOD,并在时域上通过多普勒频率区分它们。
3 4 仿真4
仿真4研究了利用多普勒信息后,双基M I M O雷达参数估计能力随脉冲数的变化曲线。K=3,目标方位(-20?,40?),(5?,0?),(30?,
1200
第6期刘帅等:基于时空结构的双基M IM O 雷达多维参数联合估计
-15?),归一化多普勒频率(-0 30,-0 05,0 10),T =200其他仿真条件同仿真1。定义 的均方根误差(RM SE )为
RMSE ( k )=1T &
T
t=1
|^ t k - k |
2
同理定义
RMSE ( k )=1T
&
T
t =1
|^ t k - k |
2
RMSE (f d k )=
1T
&
T
t =1|f^t d k -f d k |2
式中:f d k 、 k 、 k 和f^t
d k
、^ t k
、^
t
k 分别为第t 次蒙特卡罗实验中第k 个目标的多普勒频率、DOD 、DOA
的真实值和估计值。
图5(a )~图5(c )分别是多普勒频率估计、DOD 和DOA 角度估计的均方根误差RMSE 分别随脉冲数Q 变化的比较曲线。可以看出本文方法在积累脉冲数少的情况下也可以获得较高的估计精度。
图6为利用多普勒信息前后目标2的参数估计均方根误差随脉冲数变化的比较曲线。从图6可看出利用时域信息后,DOD 与DOA 的角度估计精度更高,RM SE 曲线更平缓,降低了对脉冲数的敏感度。
图5 均方根误差随脉冲数变化曲线F ig 5 RM SE of estimation vs number o f pulses
图6 利用多普勒信息前后目标2的参数估计均方根误
差随脉冲数变化曲线
Fig 6 Compariso n in R M SE o f estimation fo r targ et 2v s
number o f pulses
3 5 仿真5
仿真5研究了参数估计性能随信噪比的变化情况。脉冲数Q =100,其他仿真条件同仿真4。图7(a )~图7(c )分别是多普勒频率估计、DOD 和DOA 角度估计的均方根误差随SNR 变化的比较曲线。从图7可看出,本文方法在低信
1201
航 空 学 报第31卷
噪比情况下多普勒频率、DOD和DOA也可以获
得较高的估计精度。
图7 均方根误差随SN R变化曲线
Fig 7 RM SE o f est imatio n v s SN R
图8为利用多普勒信息前后目标2的参数估计均方根误差随SNR的变化曲线。从图8中可清晰地看出利用多普勒信息后DOD与DOA的估计精度更高,曲线更平缓,对SNR的敏感度更低。而图6和图8均可看出DOA的估计精度比DOD的估计精度高,这是因为接收天线数大于发射天线数。
图8 利用多普勒信息前后目标2的参数估计
均方根误差随SNR变化曲线
Fig 8 Compariso n in RM SE of estimat ion for
tar get2vs SNR
4 结 论
(1)针对双基M IMO雷达慢动目标,基于多维ESPRIT算法,提出了一种基于时空结构的高分辨率多普勒频率、DOA和DOD的联合估计方法。
(2)当多普勒频率不同时,利用时域信息等效于增加信号的正交性,相当于增加目标的空间分离度。
(3)仿真结果表明本文方法在实现多普勒频率估计的同时,对低信噪比、积累脉冲数少时的目标空域参数估计性能比不利用时域特性时有明显改善,在一定条件下还能解决角度兼并的问题。
参 考 文 献
[1] Fis hler E,Haimovich A,Blum R,et al.M IM O radar:an
idea w hos e tim e has com e[C]+Proceedings of th e IEEE
Radar Conference.2004:71 78.
[2] Xu L Z,Li J,Stoica P.Adaptive techn iques for M IM O
r adar[C]+IEEE Work shop Sensor Array M ulti Chanel
Process ing.2006.
1202
第6期刘帅等:基于时空结构的双基M IM O雷达多维参数联合估计
[3] Lehmann N H,Fis hler E,H aimovich A.Evaluation of
tran smit diversity in M IM O radar direction finding[J].
IEEE T rans actions on Signal Process ing,2007,55(5):
2215 2225.
[4] Xu L Z,Li J,Stoica P.T arg et detection and param eter
estimation for M IM O radar sys tems[J].IEEE T rans ac
tion s on Aer os pace and Electronic System s,2008,44(3):
927 939.
[5] Fis hler E,H aim ovich A,Blum R,et al.Spatial diver sity
in radars modles an d detection performance[J].IEEE
T ransactions on Sign al Process ing,2006,54(3):823
838.
[6] J ackson A,S toica https://www.wendangku.net/doc/4b17641921.html,bining Capon an d APES for es
timation of s pectral lines[J].Circuits,Sys tem,and S ignal
Processin g,2000,19(2):159 169.
[7] Li J,Stoica P,W ang Z.On rob ust Capon beam formin g
and diag on al loading[J].IE EE T ran saction s on S ignal
Process ing,2003,51(7):1702 1715.
[8] 夏威,何子述.APES算法在M IM O雷达参数估计中的稳
健性研究[J].电子学报,2008,36(9):1804 1809.
Xia W ei,He Zish u.On the robustness of the APES algo
rithm in the param eter estimation of M IM O radars[J].
Acta Electronic Sinica,2008,36(9):1804 1809.(in Chi
nese)
[9] Yan H D,Li J,Liao G S.M u lti target iden tification an d
location usin g bistatic M IM O radar systems[J].E UR
ASIP Journal on Advances in Signal Processing,2008.
doi:10.1155/2008/283483
[10] C hen D F,Ch en B X,Qin G D.Angle estimation usin g
E SPRIT in M IM O radar[J].Electronics Letters,2008,
44(12):770 771.
[11] Jin M,Liao G S,Li J.Joint DOD and DOA estimation for
bistatic M IM O radar[J].Signal Processin g,2009,89(2):
244 251.
[12] 秦国栋,陈伯孝,陈多芳,等.双基地多载频M IM O雷达
目标运动参数估计[J].系统工程与电子技术,2009,31
(4):799 803.
Qin Guodong,Chen Boxiao,Chen Duofang,et al.M ove
m ent parameter estimation of targets in bistatic mu lti fre
quency M IM O radar[J].Sys tems Engineerin g and Elec
tronics,2009,31(4):799 803.(in Ch ines e)
[13] 曲毅,廖桂生,朱圣棋,等.M IM O雷达的目标运动方法
及速度估计[J].西安电子科技大学学报,2008,35(5):
781 784.
Qu Yi,Liao Gu isheng,Zhu Shengqi,et al.Estimation of
th e moving angle and velocity of th e target in the M IM O
r adar[J].Jou rnal of Xidian University,2008,35(5):
781 784.(in Ch ines e)
[14] Li J,Compton R T.T w o dimensional angle and polariza
tion es tim ation us ing the ESPRIT algorithm[J].IEEE
T ransactions on Antennas and Propagation,1992,40(4):
550 555.
[15] 刁鸣,缪善林.一种二维E SPRIT算法参数配对新方法
[J].系统工程与电子技术,2007,29(8):1226 1229.
Diao M ing,M iao Shanlin.New method of param eter
m atch ing for2 D ES PRIT algorithm s[J].System s Engi
neering an d E lectron ics,2007,29(8):1226 1229.(in
C hinese)
作者简介:
刘帅(1984-) 女,硕士研究生。主要研究方向:M IM O雷达阵列信号处理。
Tel:025 ********
E m ail:liu shuai41123@yah https://www.wendangku.net/doc/4b17641921.html,
张弓(1964-) 男,博士,教授,博士生导师。主要研究方向:雷达信号处理,目标探测与识别。
E m ail:gzhang@https://www.wendangku.net/doc/4b17641921.html,
刘文波(1968-) 女,博士,教授,博士生导师。主要研究方向:数字信号处理、非线性动力学、计算机测控等。
E m ail:w enb oliu@https://www.wendangku.net/doc/4b17641921.html,
(编辑:张利平,徐晓)
1203
双基地雷达概述
“平面内”地杂波散射系数 Domville对X波段、垂直极化条件下的包括开阔草地、树林和建筑物在内的乡村地面的测量数据进行了总结,并给出了如图25.10[108]所示的。Domville称,由于数据来自不同的杂波源,并且是不同地形的平均,因此虽然这些数据有时可能会有10dB的差异;但是任一数据组的原始数据均散布在1~4.5dB之间。测量数据库由直线s=i、i =90、s =90附近及前向散射区沿镜像脊附近的那些点组成,其余的数据则是内插值。 Domville还总结了森林和市区的“平面内”测量数据[108]。所有的Domville测量地形的 B 0等值线都具有相似的形状。市区的 B 0普遍比森林高出3~6dB。但镜像脊的范围较小。 由于森林地形是更均匀的散射体,因此B0的锥状等值线延伸到前向散射象限(s >90)。镜像脊的范围较乡村地面小且幅度约低16dB。森林地形的其他B0值在s<90时和乡村地面的B0的值相似。 Domville报道[109],对小平面外角(=165),观测到的乡村地面和森林地形的B0在小i时没有明显地变化。同样,在小i的条件下,乡村地面和森林地形的B0在水平极化、垂直极化和交叉极化之间也没有观察到明显地变化。 半沙地在i<-1和所有s>-1时,水平和垂直极化测量的B0值都是-40dB[110]。交叉极化的测量值则低5~10dB。而且当从180变到165时,B0约以每度0.3dB衰减。 尽管地形条件不同,但是Cost的“平面内”数据[42]和Domville的数据[108]的吻合程度仍约为10dB之内。即使地形条件更均匀,Cost的数据曲线并不总是单调地接近双基地镜像脊区。 Domville的“平面内”地杂波数据可以分成3个区:i<-3或s<-3的低擦地角区(如图25.10所示中的单影线区);140≤(i+s)≤220的镜像脊区(如图25.10所示中的打点区);双基地散射区(如图25.10所示中的阴影区)。每个区域都能通过“半经验性处理(包括那些用于拟合测量数据的任意常数)”进行建模。
双(多)基地雷达技术概述
双(多)基地雷达技术概述 1. 概念和定义 双基地雷达是使用不同位置的天线进行发射和接收的雷达系统。当发射天线转动时,发射脉冲就在空间传播,遇到目标便反射电磁波,接收站接收回波,从中检测出目标。由于接收和发射异地,所以要利用发射波束与基线的夹角、距离和以及基线距离来解算双基地空间三角形,求出目标到发射站或接收站的距离以及目标到接收站与基线的夹角,这样接收站形成波束对准回波方向,并接收到目标信息。双基地雷达工作原理的几何关系下图所示。 若系统使用两个或多个具有公共覆盖空域的接收基地,并且每个基地的目标数据在一个中心站融合,则这种系统被称为多基地雷达。由稀疏分布阵列、随机分布阵列、畸变分布阵列和分布阵列构成的雷达、干涉仪雷达、无线电摄影和多基地测量系统有时被认为是多基地雷达的分支。它们通常是将来自每个基地的数据用相参的方式进行融合以形成大的接收孔径。多部发射机也能用于上述任何一种系统,可置于单独的基地或和接收机放在同一个基地。雷达网中三部测距单基地雷达组网有时被称为三边测量雷达。三边测量的概念也用在多基地雷达中,它借助到达时间差(TDOA)或差分多普勒技术来测量目标位置。 2. 发展历史 美国、英国、法国、前苏联、德国和日本的早期试验雷达都采用双基地体制,发射机和接收机的放置间距与目标距离相当。这些雷达采用连续波发射机,检测发射机直达信号和动目标散射的多普勒频移信号间的拍频。早期双基地雷达的许多技术都源于当时的通信技术:分置的基地,连续波发射,25~80MHz频率范围。此外,这些双基地雷达组成了当时典型的地面防空体系,用于探测20世纪30年代出现的主要威胁——飞机,但当时的技术未能很好地解决目标位置信息的提取问题。 1936年,NRL发明了收发开关,实现了收发共用一部天线。这种只有一个基地的体制就是人们熟悉的单基地雷达。它极大地扩大了雷达的用途,特别是适用于飞机、舰船和地面机动部队,结果使双基地雷达研究处于停滞阶段。 20世纪50年代初,探测飞机的要求又重新激起人们对双基地雷达的兴趣。美国的AN/FPS -23雷达是北极远程早期预警(DEW)线防空系统的低空雷达,始建于50年代中期,但不久就被拆除了。加拿大的McGill防空系统也采用了双基地体制。美国的Plato和Ordir弹道导弹探测系统是第一批多基地雷达。它们对每个接收站的距离和多普勒信息进行融合,从而估计目标的位置,但这两个系统没有部署。 在20世纪50年代和60年代初,人们编写了双基地雷达系统理论,提出了双基地RCS理论,并且进行了双基地雷达目标截面积和杂波的测量。双基地雷达的名称是由K.M.Siegel和R.E.Machol于1952年提出的。 雷达抗后向有源干扰和抗反辐射导弹(ARM)的需求,使双基地雷达在20世纪70年代和80年代重新得到重视。通过选择收发设备的位置可降低后向干扰,如将接收站置于干扰机的主波束外而让干扰机指向发射站。若将发射机从战场前方转移到后方,则发射机就不易受到
双多基地雷达系统的发展及应用
摘要:本文首先叙述了双(多)基地雷达的发展历史,并对该雷达在现代防御体系中的优势进行了分析与探讨,最后阐述了典型的双(多)基地雷达系统及其未来的发展趋势。 1引言 双(多)基地雷达主要是相对于比较常见的单基地雷达而言的,它是从雷达收发站配置的角度来命名的。单基地雷达一般是收发共址,即接收站和发射站位于同一个地方,而双(多)基地雷达则是收发异址,其中多基地雷达还具有多个发射站和多个接收站,以离散的形式配置。双(多)基地雷达实际上早在单基地雷达发展前好几年就已经出现了,其原理也早已为人们所应用,但是发展的过程却十分缓慢。这主要是由于天线收发开关和脉冲发射技术的出现,使得单基地雷达在很长一段时间内占据了雷达技术发展的主导地位。但是近年来,随着"四大威胁"即目标隐身技术,综合性电子干扰技术、低空超低空突防技术和反辐射导弹技术的迅猛发展,现代战争对军用雷达的要求变得越来越苛刻,单基地雷达因此也面临着日益严重的生存危机。在海湾战争中,伊拉克的雷达系统为了躲避美军反辐射导弹的攻击,不得不采取了关机的消极措施以求安全。因此,为了对付日趋发展并成熟起来的"四大威胁"的挑战,双(多)基地体制雷达又重新得到了各国的重视。由于双(多)基地雷达使用两个或两个以上的分离基地(其中包括有源和无源基地),因此按照不同的军事要求,它在防御体系中就有多种可能的组合形式。从部置的位置方面来看,可分为地发/地收,空发/地收,地发/空收等几种形式,多基地雷达还具有一发多收,多发多收等形式。 2双(多)基地雷达的发展历史 在双(多)基地雷达正式出现之前,人们实际上就已经开始了这种雷达体制的应用。到三十年代后期,在美、英、法、德、俄等国的早期雷达防御系统中,都出现了这种体制的雷达。当时采用的基本工作原理是使用相距甚远的发射机和接收机。通过测定目标反射信号的多普勒频移和发射机向接收机直接传播的信号之间的差频,从而检测出穿过发射机--接收机基线的目标。1922年,美国海军实验室(NRL)首次应用一部波长为5m的连续波试验装置探测水面船只,由于当时没有有效的隔离方法,只能把收发机分置,这就是一种早期的双基地连续波雷达。 到1932年,NRL已经用这种双基地雷达探测到了相距80km的飞机。同时,美国和法国还布置了双基地的远程雷达防御网,用于探测入侵的飞机。1934年,前苏联也研制出了一种双基地连续波雷达,称为RUS-1,到第二次世界大战德国入侵时,该雷达已在前苏联的远
双基地雷达
茶话双基地雷达 姓名:刘玉敬 学号:2009081221 1.双基地雷达定义 双基地雷达采用两个相距颇远的基地,其中一个放置发射机,另一个放置相应的接收机。其目标检测与单基地雷达类似,即发射机照射目标、接收机检测和处理目标回波。目标定位也与单基地雷达类似,但更复杂:为求解发射机-目标-接收机三角形(双基地三角形),需要信号传播总时间、接收机的正交角测量及对发射机位置的一些估计。由于站址分开,因此可能再加上副瓣对消,对直达路径发射信号提供足够的空间隔离度。双基地雷达常采用CW 波形。 在如图1所示的xy 平面上给出了双基地雷达的坐标系和参数的定义。该平面有时也称为双基地平面。双基地三角形处在双基地平面内。发射机和接收机间的距离L称为基线距离或简称基线。θT 和θR 分别是发射机和接收机的视角,它们也被称做到达角(AOA )或视线角(LOS )。双基地角β =θT -θR ,也称交角或散射角。用β来计算与目标相关的参数及用θT 或θR 来计算与发射机或接收机相关的参数是很方便的。 图1 两维的双基地雷达正北坐标系 若以发射基地和接收基地为焦点做椭圆,那么椭圆在目标处的切线和双基地角的平分线垂直,这是一个很有用的关系。该椭圆就是距离等值线。在双基地“足迹”内,即在发射波束和接收波束的交叠区内,该切线是距离等值线的一个好的近似。 单基地雷达和双基地雷达可以从几何关系上加以区分。若设定L =0或R T =R R 和β =0,则可等效为单基地雷达。 2.双基地雷达方程 双基地雷达距离方程的推导和单基地雷达距离方程的推导完全类似。双基地雷达的最大作用距离为 2/1R T m i n n s 32R 2T B 2R T T m a x R T ))/()4(()(L L N S B KT F F G G P R R π=σλ (1) 式中,R T 为发射机至目标的距离;R R 为接收机至目标的距离;P T 为发射功率;G T 为发射天线功率增益;G R 为接收天线功率增益;λ为波长;σB 为双基地雷达目标截面积;F T 为发射机至目标路径的方向图传播因子;F R 为目标至接收机路径的方向图传播因子;K
双、多基地雷达介绍
双/多基地雷达系统 随着军事科学技术的飞速发展,战争的不断升级,隐身飞行器,反辐射导弹、低空突防和电磁干扰都严重威胁着单基地雷达的生存,因此,双/多基地雷达越来越受到人们的重视。 一、 双/多基地雷达的基本概念 双/多基地雷达即发射站和接收站分置的雷达系统。如图所示,其发射天线位于Tx 处,接收天线位于Rx 处,两者距离为L (称为基线距离或基线),目标位于基线 处。三者所处位置可在地面、空中或空间,可以是静止的,也 可以是运动的。 在双基地雷达几何结构中,以目标位置为顶点,发射站 和接收站之间的夹角称为双基地角。 采用两个或者多个具有公共空间覆盖区的接收站且从公共覆盖区得到的目标数据均在中心站进行合成处理的雷达,称为多基地雷达。 二、 合作式双/多基地雷达 1.工作原理 在合作式双、多基地雷达系统中,发射机和接收机设在相距很远的两地,并且多部接收机可以共用一部发射机。由于是无源的,接收机不会受到威胁,接收站处于隐蔽状态,因此反辐射导弹只能攻击发射站。若发射站远离战区或者机动性较大,就可以大大降低受到攻击的可能性。从配置上看,地面接收站与高空飞行的飞机合作,或与卫星合作将是合作式双/多基地雷达的最终形式。 合作式双/多基地雷达一般由一个发射站和一个或多个接收站组成(T/R 、T/Rn )。隐身目标的前向散射RCS 一般大于其后向散射RCS 。因此,通过合理的布站,使接收站能接收目标的前向散射,就可抑制其RCS 的下降。 合作式双/多基地雷达的重要参数是双基地角β。理论分析得出:当β小于90度时,双基地雷达的雷达截面积与单基地雷达的相等;当β大于130度时,就产生前向散射;当β等于180度时,由于目标遮断入射电磁波,这时在目标上产生一种感应电流,此电流能辐射一前向波束,波束的峰值取决于目标的投射 面积,与目标的形状和材料无关。因此这种前向散射雷达将使雷达截面积增大,可以大大提高对隐身目标目标发射站Tx 接收站Rx 双基地雷达几何结构