模糊控制优缺点
4模糊控制的优缺点及需要解决的问题分析
4. 1模糊控制的优点
( 1) 使用语言方法, 可不需要过程的精确数学模型;
( 2) 鲁棒性强, 适于解决过程控制中的非线性、强耦合时变、滞后等问题;
( 3) 有较强的容错能力。具有适应受控对象动力学特征变化、环境特征变化和动行条件变化的能力;
( 4) 操作人员易于通过人的自然语言进行人机界面联系, 这些模糊条件语句容易加到过程的控制环节上。
4. 2模糊控制的缺点
( 1) 信息简单的模糊处理将导致系统的控制精度降低和动态品质变差;
( 2) 模糊控制的设计尚缺乏系统性, 无法定义控制目标。
4. 3模糊控制理论需解决的问题
模糊控制理论经过近几十年的发展, 已经得到了广泛的应用。但模糊控制理论也还存在一些不足, 还有一些亟待解决的问题, 归纳如下:
( 1) 要揭示模糊控制器的实质和工作机理, 解决稳定性和鲁棒性理论分析的问题。
2) 很多应用和经验表明, 模糊控制的鲁棒性优于传统控制策略。但模糊控制和传统控制的鲁棒性的对比关系究竟是怎么样, 尚缺少理论分析和数学推导方面的比较。
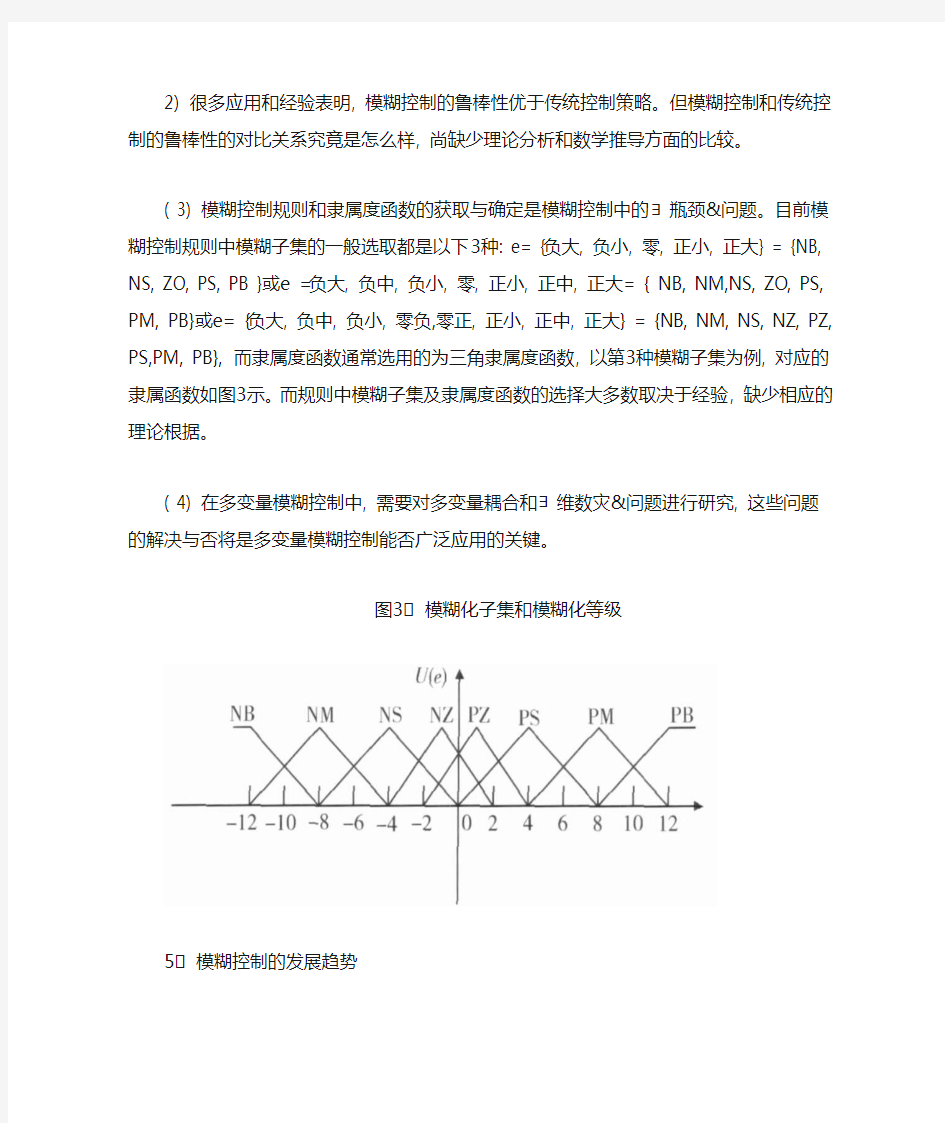
( 3) 模糊控制规则和隶属度函数的获取与确定是模糊控制中的?瓶颈&问题。目前模糊控制规则中模糊子集的一般选取都是以下3种: e= {负大, 负小, 零, 正小, 正大} = {NB, NS, ZO, PS, PB }或e =负大, 负中, 负小, 零, 正小, 正中, 正大= { NB, NM,NS, ZO, PS, PM, PB}或e= {负大, 负中, 负小, 零负,零正, 正小, 正中, 正大} = {NB, NM, NS, NZ, PZ, PS,PM, PB}, 而隶属度函数通常选用的为三角隶属度函数, 以第3种模糊子集为例, 对应的隶属函数如图3示。而规则中模糊子集及隶属度函数的选择大多数取决于经验, 缺少相应的理论根据。
( 4) 在多变量模糊控制中, 需要对多变量耦合和?维数灾&问题进行研究, 这些问题的解决与否将是多变量模糊控制能否广
泛应用的关键。
图3模糊化子集和模糊化等级
5模糊控制的发展趋势
模糊控制的发展大致有以下几个方向:
( 1) 复合模糊控制器。继续研究模糊控制和PID 控制器、变节
构控制器、模糊H 控制器等的组合研究, 设计出满足各种不
同指标要求的控制器。
( 2) 和各种智能优化算法相结合的模糊控制。各种智能优化算
法(如遗传算法、模拟退火算法、粒子群优化算法等)能够对模糊控制规则进行动态寻优, 故能在线修改模糊控制规则, 改善系
统的控制品质。
( 3) 专家模糊控制。专家模糊是将专家系统技术与模糊控制相
结合的产物。引入专家系统, 可进一步提高模糊控制的智能水平, 专家模糊控制保持了基于规则的方法和模糊集处理带来的灵活性, 同时又把专家系统技术的知识表达方法结合起来, 能处理
更广泛的控制问题。
( 4) 多变量模糊控制。研究多变量模糊控制中存在着的多变量
耦合和?维数灾&等问题。
( 5) 很多公开发表的文献对所设计模糊控制器的稳定性及鲁棒
性分析采用仿真实验的方法, 而采用理论分析的较少。对混合模糊系统的稳定性及鲁棒性分析一般有2种方法[ 5] : 第1 种方法利用模糊系统辨识的方法将控制对象变换为模糊模型表示,使整
个系统变为纯粹的模糊模型, 从而可采用模糊关系法及模糊相
平面分析法等来检验系统的稳定性; 第2种方法将控制器的模糊
模型变为确定性的模型, 从而混合模糊系统变为常规的控制系统, 进而可采用常规的方法来对系统进行稳定性分析。例如描述函数法、圆判据法、一般相平面法及线性近似法
等。而究竟采用模糊模型还是确定性模型则需要根据所设计系统的具体情况进行分析, 因此选择合适的理论方法对所设计和模糊控制器进行稳定性及鲁棒性分析也是模糊控制理论发展的方向之一。
6结束语
文章对模糊控制理论的发展进行了简要概述,对模糊控制的原理及模糊控制器的设计步骤进行了详细介绍; 对模糊控制在航空航天中应用(各种控制器的设计)进行了分析, 对模糊控制的优缺点及需要解决的问题进行了归纳和分析; 最后对模糊控制的发展趋势进行了展望。
关于模糊控制理论的综述
物理与电子工程学院 《人工智能》 课程设计报告 课题名称关于模糊控制理论的综述 专业自动化 班级 11级3班 学生姓名郑艳伟 学号 指导教师崔明月 成绩 2014年6月18日
关于模糊控制理论的综述 摘要:模糊控制方法是智能控制的重要组成部分,本文简要回顾了模糊控 制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤, 分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根 据各种模糊控制器的不同特点,对模糊控制在电力系统中的应用进行了分 类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋 势与动态. 关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展模糊控制是以模糊集理论、模糊语言变量和模糊控制逻辑推理为基础的一种智能控制方法,从行为上模拟人的思维方式,对难建模的对象实施模糊推理和决策的一种控制方法.模糊控制作为智能领域中最具有实际意义的一种控制方法,已经在工业控制领域、电力系统、家用电器自动化等领域中解决了很多的问题,引起了越来越多的工程技术人员的兴趣. 模糊控制系统简介 模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.1965年美国的扎德[1]创立了模糊集合论, 1973 年, 他给出了模糊逻辑控制的定义和相关的定理.1974 年英国的Mamdani 首先用模糊控制语句组成模糊控制器,并把它用于锅炉和蒸汽机的控制, 在实验室获得成功, 这一开拓性的工作标志着模糊控制论的诞生. 模糊控制系统主要是模拟人的思维、推理和判断的一种控制方法, 它将人的经验、常识等用自然语言的形式表达出来, 建立一种适用于计算机处理的输入输出过程模型, 是智能控制的一个重要研究领域.从信息技术的观点来看, 模糊控制是一种基于规则的专家系统.从控制系统技术的观点来看, 模糊控制是一种普遍的非线性特征域控制器. 相对传统控制, 包括经典控制理论与现代控制理论.模糊控制能避开对象的数学模型(如状态方程或传递函数等) , 它力图对人们关于某个控制问题的成功与失败和经验进行加工, 总结出知识, 从中提炼出控制规则, 用一系列多维模糊条件语句构造系统的模糊语言变量模型, 应用CRI 等各类模糊推理方法,
模糊控制的优缺点
模糊控制的优缺点
————————————————————————————————作者:————————————————————————————————日期:
1.模糊控制中模糊的含义 模糊控制中的模糊其实就是不确定性。从属于该概念和不属于该概念之间没有明显的分界线。模糊的概念导致了模糊现象。 2.模糊控制的定义 模糊控制就是利用模糊数学知识模仿人脑的思维对模糊的现象进行识别和判断,给出精确的控制量,利用计算机予以实现的自动控制。 3.模糊控制的基本思想 模糊控制的基本思想:根据操作人员的操作经验,总结出一套完整的控制规则,根据系统当前的运行状态,经过模糊推理,模糊判断等运算求出控制量,实现对被控制对象的控制。 4.模糊的控制的特点 不完全依赖于纯粹的数学模型,依赖的是模糊规则。模糊规则是操作者经过大量的操作实践总结出来的一套完整的控制规则。 模糊控制的对象称为黑匣(由于不知道被控对象的内部结构、机理,无法用语言去描述其运动规律,无法去建立精确的数学模型)。但是模糊规则又是模糊数学模型。 5 模糊控制的优缺点及需要解决的问题分析 5.1模糊控制的优点 (1)使用语言方便,可不需要过程的精确数学模型;(不需要精确的数学模型) (2)鲁棒性强,适于解决过程控制中的非线性、强耦合时变、
滞后等问题;鲁棒性即系统的健壮性。 (3)有较强的容错能力。具有适应受控对象动力学特征变化、环境特征变化和动行条件变化的能力; (4)操作人员易于通过人的自然语言进行人机界面联系,这些模糊条件语句容易加到过程的控制环节上。 5.2模糊控制的缺点 (1)信息简单的模糊处理将导致系统的控制精度降低和动态品质变差; (2)模糊控制的设计尚缺乏系统性,无法定义控制目标。 6.模糊数学 模糊数学就是利用数学知识研究和解决模糊现象。在数学和模糊现象之间架起了一座桥梁。 6.1模糊集合的概念 每一个概念都有内涵和外延。 内涵就是指概念的本质属性的集合。外延就是符合某种本质属性的全体对象的集合。 模糊数学的基础就是模糊理论集。 在模糊集合设计到的论域U 上,给定了一个映射A,A :U →[0,1] ,)(x x A μ ,则称A 为论域U 上的模糊集合或者模糊子集; )(x A μ表示U 中各个元素x 属于集合A 的程度,称为元素x 属于模糊集合A 的隶属函数。当x 是一个确定的0x 时,称)(0x A μ为元素0x 对于模糊集合A 的隶属 度。 F 集合引出的几个概念
模糊控制详细讲解实例
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h 设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制 ② 否则:先将油门控制量置0,再选择刹车控制 0 基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点 一、速度控制算法: 欧阳歌谷(2021.02.01) 首先定义速度偏差-50 km/h≤e(k)≤50km/h,-20≤ec(i)=e(k)-e(k-1)≤20,阀值eswith=10km/h 设计思想:油门控制采用增量式PID控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e(k)<0 ①e(k)>-eswith and throttlr_1≠0 选择油门控制 ②否则:先将油门控制量置0,再选择刹车控制 0 E/EC和U取相同的隶属度函数即: 说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略 实际EC和E输入值若超出论域范围,则取相应的端点值。 3.模糊控制规则 由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC和U语言值隶属度向量表 设置模糊规则库如下表: 表2:模糊规则表 3.模糊推理 由模糊规则表3可以知道输入E与EC和输出U的模糊关系,这里我取两个例子做模糊推理如下: if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为: 模糊控制的应用 学院实验学院 专业电子信息工程 姓名 指导教师___________ 日期20门年9月20日 在自动控制中,包括经典理论和现代控制理论中有一个共同的特点,即控制器的综合设计都要建立在被控对象准确的数学模型(如微分方程等) 的基础上,但是在实际工业生产中,很多系统的影响因素很多,十分复杂。建立精确的数学模型特别困难,甚至是不可能的。这种情况下,模糊控制的诞生就显得意头重大,模糊控制不用建立数学模型,根据实际系统的输入输出的结果数据,参考现场操作人员的运行经验,就可对系统进行实时控制。模糊控制实际上是一种非线性控制,从属于智能控制的范畴。现代控制系统中的的控制能方便地解决工业领域常见的非线性、时变、在滞后、强耦合、变结构、结束条件苛刻等复杂问题。可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。 所谓模糊控制,其定义是是以模糊数学作为理论基础,以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的一种控制。模糊控制具有以下突出特点: ⑴模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点 是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用 ⑵由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控 制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 ⑶基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同, 容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 ⑷模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人 工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 ⑸模糊控制系统的鲁棒性強,干扰和参数变化对控制效果的影响被大大减 弱,尤其适合于非线性、时变及纯滞后系统的控制。 由于有着诸多优点,模糊理论在控制领域得到了广泛应用。下面我们就以下示例介绍模糊控制在实际中的应用: 电机调速控制系统见图1,模糊控制器的输入变量为实际转速与转速给定值之间的差值e及其变化率仝,输出变量为电机的电压变化量u。图2为电机调试输出结果,其横坐标为时间轴,纵坐标为转速。当设定转速为2 OOOr / s时,电机能很快稳定运行于2 OOOr / s;当设定转速下降到1 OOOr / s时,转速又很快下降到1 OOOr / s稳定运 行。 1、 由于s12xs没有了模糊指令,使单片机运用模糊控制增加了不少难度,但经过研究发现,还是可以通过matlab接口来实现的,本人也在努力中,希望有更多的人来共同研究~ 对于实际模糊控制系统,由于在高级语言中模糊控制程序的实现比较复杂,因 此引入模糊控制存在一定的困难,程序代码的过于复杂也会严重影响模糊控制系 统的开发周期。而Matlab 系统及其工具箱中提供了一些能够独立完成某些Matlab 功能的C/C++库函数,这些库函数可以直接应用到C/C++平台中,脱离系统完成 Matlab 某些功能,极大的方便了实际应用。Matlab Fuzzy Logic 工具箱的独立C 代码就是一个这样的C 语言库[1]。 独立的C 代码模糊推理引擎函数库fis.c 位于Matlab 目录下的 toolbox\fuzzy\fuzzy 目录中,它包含了在C 语言环境下调用Matlab Fuzzy Logic 工具箱建立的模糊推理系统的数据文件(*.fis)进行模糊逻辑推理的一系列C 函 数,其基本原理是利用C 代码实现Matlab 中的模糊推理系统(FIS)功能。该目录 下还有一个C 代码程序fismain.c,它实际上是利用fis.c 库函数来实现模糊推理系 统的一个实例。 正确地熟悉了fis.c 库函数中的函数定义,在应用程序中正确调用,即可实 现模糊推理系统功能。例如,从Matlab 的模糊推理系统文件(*.fis)读入系统数据, 可用下面的语句:fisMatrix=returnFismatrix(fis_file,&fis_row_n,&fis_col_n);建立基于C 代码的模糊推理系统,可用下面的语句: fisBuildFisNode(fis,fisMatrix,fis_col_n,MF_POINT_N)。 但是需要说明的是,在独立C代码函数库fis.c 中只定义了Matlab Fuzzy Logic 工具箱的11 种隶属函数以及AND、OR、IMP 和AGG 四种逻辑操作函数。所以 在利用Matlab 的模糊逻辑工具箱建立用于独立C 代码引擎的模糊推理系统时, 不允许采用自定义的隶属度函数和逻辑操作函数来设计系统,除非修改fis.c 函 数库[2]。 设计基于独立的C 代码模糊推理引擎的模糊控制程序主要有以下两个步骤: (1) 利用Matlab 的模糊逻辑工具箱建立一个模糊推理系统,并将系统存 为扩展名为fis 的数据文件。注意只能使用Matlab 定义的隶属度函数 和逻辑操作函数, (2) 在C 语言应用程序中实现Matlab 中定义的模糊推理系统功能。两者之间的接 口就是独立C 代码模糊推理引擎函数库fis.c。 2、 基于S12的模糊控制调试心得 小可不才在博客发了一篇有关S12的模糊控制的日志(《MC9S12DG128模糊控制崩溃之旅》)。并跟一些志同道合的网友展开了较为深入的讨论。现应部分网友同仁的要求将我调试成功的心得体会写在如下,由于本人也只是懂得一些皮毛,而且有很多问题并未深究,难免有不妥或错误之处,还请各位包涵并指正,谢谢! 在此以飞思卡尔智能小车的方向控制为例,文中可能会提到一些变量,但不会对该变量作深入的探究,敬请原谅! 第5章 模糊控制器设计的基本方法 5.1 模糊控制器的结构设计 结构设计:确定输入、输出变量的个数(几入几出)。 5.2 模糊控制规则设计 1. 语言变量词集 {}PB PM PS O NS NM NB ,,,,,, 2. 确立模糊集隶属函数(赋值表) 3. 建立模糊控制规则,几种基本语句形式: 若A 则B c R A B A E =?+? 若A 则B 否则C c R A B A C =?+? 若A 或B 且C 或D 则E ()()R A B E C D E =+?+????????? 4. 建立控制规则表 5.3 模糊化方法及解模糊化方法 模糊化方法 1. 将[]b a ,内精确量离散化为[]n n +-,内的模糊量 2. 将其区间精确量x 模糊化为一个单点集,即0)(,1)(==x x μμ 模糊推理及非模糊化方法 1. MIN-MAX ——重心法 11112222n 00R and R and R and and '? n n n A B C A B C A B C x y c →→→→= 三步曲: 取最小 1111'()()()()c A o B o C z x y z μμμμ=∧∧ 取最大 12''''()()()()n c c c c z z z z μμμμ=∨∨∨ 2. 最大隶属度法 例: 10.3 0.80.5 0.511234 5 C =+----- +++,选3-=*u 20.30.80.40.21101234 5 C =+ +++ + ,选 5.12 21=+=*u 5.4 论域、量化因子及比例因子选择 论域:模糊变量的取值范围 基本论域:精确量的取值范围 误差量化因子:e e x n k /= 比例因子:e y k u u /= 误差变化量化因子:c c x m k /= 5.5 模糊控制算法的流程 m j n i C u B EC A E ij j i ,,2,1;,,2,1 then then if ===== 其中 i A 、 j B 、ij C 是定义在误差、误差变化和控制量论域X 、Y 、Z 上的模糊集合,则该语句所表示的模糊关系为 j i ij j i C B A R ,??= m j n i j i C B A R z y x z y x ij j i ===== ,1 ,1)()()(),,(μμμ μ 根据模糊推理合成规则可得:R B A U )(?= Y y X x B A R U y x z y x z ∈∈=)()(),,()(μμμμ 设论域{}{}{}l m n z z z Z y y y x x x X ,,,,,,,Y ,,,,212121 ===,则X ,Y ,Z 上的模糊集合分别为一个n ,m 和l 元的模糊向量,而描述控制规则的模糊关系R 为一个m n ?行l 列矩阵。 由i x 及i y 可算出ij u ,对所有X ,Y 中元素所有组合全部计算出相应的控制量变化值,可写成矩阵()ij n m u ?,制成的表即为查询表或称为模糊控制表。 * 模糊控制器设计举例(二维模糊控制器) 1. 结构设计:二维模糊控制器,即二输入一输出。 2. 模糊控制规则:共21条语句,其中第一条规则为 t h e n o r and or if :1 PB u NM NB EC NM NB E R === 3. 对模糊变量E ,EC ,u 赋值(见教材中的表) 选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。 一.实验题目:基于模糊控制系统的单级倒立摆 二.实验目的与要求: 倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。对它的研究在理论上和方法上都有其重要意义。倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。同时, 它和火箭的姿态控制以及步行机器 人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。 本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。 本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。 同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。 三.实验步骤: 1.一级倒立摆系统模型的建立 在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可 将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下: 小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F; 4模糊控制的优缺点及需要解决的问题分析 4. 1模糊控制的优点 ( 1) 使用语言方法, 可不需要过程的精确数学模型; ( 2) 鲁棒性强, 适于解决过程控制中的非线性、强耦合时变、滞后等问题; ( 3) 有较强的容错能力。具有适应受控对象动力学特征变化、环境特征变化和动行条件变化的能力; ( 4) 操作人员易于通过人的自然语言进行人机界面联系, 这些模糊条件语句容易加到过程的控制环节上。 4. 2模糊控制的缺点 ( 1) 信息简单的模糊处理将导致系统的控制精度降低和动态品质变差; ( 2) 模糊控制的设计尚缺乏系统性, 无法定义控制目标。 4. 3模糊控制理论需解决的问题 模糊控制理论经过近几十年的发展, 已经得到了广泛的应用。但模糊控制理论也还存在一些不足, 还有一些亟待解决的问题, 归纳如下: ( 1) 要揭示模糊控制器的实质和工作机理, 解决稳定性和鲁棒性理论分析的问题。 2) 很多应用和经验表明, 模糊控制的鲁棒性优于传统控制策略。但模糊控制和传统控制的鲁棒性的对比关系究竟是怎么样, 尚缺少理论分析和数学推导方面的比较。 ( 3) 模糊控制规则和隶属度函数的获取与确定是模糊控制中的?瓶颈&问题。目前模糊控制规则中模糊子集的一般选取都是以下3种: e= {负大, 负小, 零, 正小, 正大} = {NB, NS, ZO, PS, PB }或e =负大, 负中, 负小, 零, 正小, 正中, 正大= { NB, NM,NS, ZO, PS, PM, PB}或e= {负大, 负中, 负小, 零负,零正, 正小, 正中, 正大} = {NB, NM, NS, NZ, PZ, PS,PM, PB}, 而隶属度函数通常选用的为三角隶属度函数, 以第3种模糊子集为例, 对应的隶属函数如图3示。而规则中模糊子集及隶属度函数的选择大多数取决于经验, 缺少相应的理论根据。 ( 4) 在多变量模糊控制中, 需要对多变量耦合和?维数灾&问题进行研究, 这些问题的解决与否将是多变量模糊控制能否广 泛应用的关键。 图3模糊化子集和模糊化等级 5模糊控制的发展趋势 模糊控制的发展大致有以下几个方向: ( 1) 复合模糊控制器。继续研究模糊控制和PID 控制器、变节 模糊控制的基本原理 模糊控制是以模糊集合理论、模糊语言及模糊逻辑为基础的控制,它是 模糊数学在控制系统中的应用,是一种非线性智能控制。 模糊控制是利用人的知识对控制对象进行控制的一种方法,通常用“if条件,then结果”的形式来表现,所以又通俗地称为语言控制。一般用于无法以 严密的数学表示的控制对象模型,即可利用人(熟练专家)的经验和知识来很好 地控制。因此,利用人的智力,模糊地进行系统控制的方法就是模糊控制。模 糊控制的基本原理如图所示: 模糊控制系统原理框图 它的核心部分为模糊控制器。模糊控制器的控制规律由计算机的程序实现,实现一步模糊控制算法的过程是:微机采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E;一般选误差信号E作为模糊控制器的一个输入量,把E的精确量进行模糊量化变成模糊量,误差E的模糊量可用相应的模糊语言表示;从而得到误差E的模糊语言集合的一个子集e(e实际上是一个模糊向量); 再由e和模糊控制规则R(模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量u为: 式中u为一个模糊量;为了对被控对象施加精确的控制,还需要将模糊量u 进行非模糊化处理转换为精确量:得到精确数字量后,经数模转换变为精确的模拟量送给执行机构,对被控对象进行一步控制;然后,进行第二次采样,完成第二步控制……。这样循环下去,就实现了被控对象的模糊控制。 模糊控制(Fuzzy Control)是以模糊集合理论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制。模糊控制同常规的控制方案相比,主要特点有: (1)模糊控制只要求掌握现场操作人员或有关专家的经验、知识或操作数据,不需要建立过程的数学模型,所以适用于不易获得精确数学模型的被控过程,或结构参数不很清楚等场合。 (2)模糊控制是一种语言变量控制器,其控制规则只用语言变量的形式定性的表达,不用传递函数与状态方程,只要对人们的经验加以总结,进而从中提炼出规则,直接给出语言变量,再应用推理方法进行观察与控制。 (3)系统的鲁棒性强,尤其适用于时变、非线性、时延系统的控制。 (4)从不同的观点出发,可以设计不同的目标函数,其语言控制规则分别是独立的,但是整个系统的设计可得到总体的协调控制。 它是处理推理系统和控制系统中不精确和不确定性问题的一种有效方法,同时也构成了智能控制的重要组成部分。 模糊控制器的组成框图主要分为三部分:精确量的模糊化,规则库模糊推理, 第5章 模糊控制器设计的基本方法 5.1 模糊控制器的结构设计 结构设计:确定输入、输出变量的个数(几入几出)。 5.2 模糊控制规则设计 1. 语言变量词集 {}PB PM PS O NS NM NB ,,,,,, 2. 确立模糊集隶属函数(赋值表) 3. 建立模糊控制规则,几种基本语句形式: 若A %则B % c R A B A E =?+?%%%% 若A %则B %否则C % c R A B A C =?+?%%%%% 若A %或B %且C %或D %则E ()()R A B E C D E =+?+?????????g %%%% % 4. 建立控制规则表 5.3 模糊化方法及解模糊化方法 模糊化方法 1. 将[]b a ,内精确量离散化为[]n n +-,内的模糊量 2. 将其区间精确量x 模糊化为一个单点集,即0)(,1)(==x x μμ 模糊推理及非模糊化方法 1. MIN-MAX ——重心法 三步曲: 取最小 1111'()()()()c A o B o C z x y z μμμμ=∧∧ 取最大 12''''()()()()n c c c c z z z z μμμμ=∨∨∨L 2. 最大隶属度法 例: 10.30.80.50.5112345C =+-----% +++,选3-=*u 20.30.80.40.211012345C =+% ++++,选5.1221=+=*u 5.4 论域、量化因子及比例因子选择 论域:模糊变量的取值范围 基本论域:精确量的取值范围 误差量化因子:e e x n k /= 比例因子:e y k u u /= 误差变化量化因子:c c x m k /= 5.5 模糊控制算法的流程 其中 i A 、 j B 、ij C 是定义在误差、误差变化和控制量论域X 、Y 、Z 上的模糊集合,则该语句所表示的模糊关系为 根据模糊推理合成规则可得:R B A U ο)(?= 设论域{}{}{}l m n z z z Z y y y x x x X ,,,,,,,Y ,,,,212121ΛΛΛ===,则X ,Y ,Z 上的模糊集合分别为一个n ,m 和l 元的模糊向量,而描述控制规则的模糊关系R 为一个m n ?行l 列矩阵。 由i x 及i y 可算出ij u ,对所有X ,Y 中元素所有组合全部计算出相应的控制量变化值,可写成矩阵()ij n m u ?,制成的表即为查询表或称为模糊控制表。 * 模糊控制器设计举例(二维模糊控制器) 1. 结构设计:二维模糊控制器,即二输入一输出。 2. 模糊控制规则:共21条语句,其中第一条规则为 3. 对模糊变量E ,EC ,u 赋值(见教材中的表) 4. 建立模糊控制表: 注意:对于e 和ec 隶属函数数值取量化等级上为1,其余为0,这样可简化 《冶金自动化工程案例分析》课程论文 模糊控制的发展前景分析 电子与信息工程学院 自动化094班 张宇 120093101091 模糊控制的发展前景分析 电子与信息工程学院自动化094班张宇 摘要:模糊控制方法是智能控制的重要组成部分。本文简要介绍了模糊控制的概念和特点,并对模糊控制的原理作了说明,较详细的介绍了对于常规模糊控制方 法的改进,包括Fuzzy-PIS复合控制、三位模糊控制器、Smith-Fuzzy控制器、专家模糊控制器等,对模糊控制系统与传统PID控制作了简单比较,最后对模糊控制的优缺点进行分析并对模糊控制未来发展作出了展望。 关键字:模糊控制;原理;模糊PID控制;展望; 一.模糊控制简介 模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。模糊控制主要是模拟人的思维、推理和判断的一种控制方法, 它将人的经验、常识等用自然语言的形式表达出来,建立一种适用于计算机处理的输入输出过程模型,是智能控制的一个重要研究领域。从信息技术的观点来看, 模糊控制是一种基于规则的专家系统。从控制系统技术的观点来看, 模糊控制是一种普遍的非线性特征域控制器。 模糊控制作为智能领域中最具有实际意义的一种控制方法,已经在工业控制领域、家用电器自动化领域和其他很多行业中解决了传统控制方法无法或者是难以解决的问题,取得了令人瞩目的成效,引起了越来越多的控制理论的研究人员和相关领域的广大工程技术人员的极大兴趣。 相对传统控制,包括经典控制理论与现代控制理论。模糊控制能避开对象的数学模型( 如状态方程或传递函数等),它力图对人们关于某个控制问题的成功与失败和经验进行加工, 总结出知识,从中提炼出控制规则,用一系列多维模糊 条件语句构造系统的模糊语言变量模型, 应用CRI等各类模糊推理方法,可以得 到适合控制要求的控制量, 可以说模糊控制是一种语言变量的控制。 二. 模糊控制的原理 基本模糊控制系统包括模糊化处理、模糊推理和清晰化控制三个环节。 图1模糊控制系统框图 模糊化处理就是将模糊控制器输入量的确定值转换为相应模糊语言变量值的过程, 此相应语言变量值均由对应的隶属度来定义。通过这样一个把输入变量映射到合适的响应论域量程的过程,精确的输入数据就变换成适当的语言值或模 下面将根据模糊控制器设计步骤,一步步利用Matlab工具箱设计模糊控制器。 Matlab模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,通过它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定相应参数,就可以很快得到我们所需要的控制器,而且修改也非常方便。 首先我们在Matlab的命令窗口(command window)中输入fuzzy,回车就会出来这样一个窗口。 下面我们都是在这样一个窗口中进行模糊控制器的设计。 1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。 这里我们可以选取标准的二维控制结构,即输入为误差e和误差变化ec,输出为控制量u。注意这里的变量还都是精确量。相应的模糊量为E,EC和U,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。 2.输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。 首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,例如我们可以设置误差E(此时为模糊量)、误差变化EC、控制量U的论域均为{-3,-2,-1,0,1,2,3};然后我们为模糊语言变量选取相应的隶属度函数。 在模糊控制工具箱中,我们在Member Function Edit中即可完成这些步骤。首先我们打开Member Function Edit窗口. 然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-3 3],添加隶属函数的个数为7. 然后根据设计要求分别对这些隶属函数进行修改,包括对应的语言变量,隶属函数类型。 1 ?模糊控制屮模糊的含义 模糊控制中的模糊其实就是不确定性。从属于该概念和不属于该概念Z 间没有明显的分界线。模糊的概念导致了模糊现彖。 2.模糊控制的定义 模糊控制就是利用模糊数学知识模仿人脑的思维对模糊的现象进行识别和判断,给出精确的控制量,利用计算机予以实现的自动控制。3?模糊控制的基本思想 模糊控制的基本思想:根据操作人员的操作经验,总结出一套完整的控制规则,根据系统当前的运行状态,经过模糊推理,模糊判断等运算求出控制量,实现对被控制对象的控制。 4.模糊的控制的特点 不完全依赖于纯粹的数学模型,依赖的是模糊规则。模糊规则是操作者经过人量的操作实践总结出来的一套完整的控制规则。 模糊控制的对象称为黑匣(由于不知道被控对彖的内部结构、机理,无法用语言去描述其运动规律,无法去建立精确的数学模型)。但是模糊规则又是模糊数学模型。 5模糊控制的优缺点及需要解决的问题分析 5.1模糊控制的优点 (1)使用语言方便,可不需要过程的精确数学模型;(不需要精确的数学模型) (2)鲁棒性强,适于解决过程控制中的非线性、强耦合时变、滞后等问题;仔棒性即系统的健壮性。 (3)有较强的容错能力。具有适应受控对象动力学特征变化、环境特征变化和动行条件变化的能力; (4)操作人员易于通过人的自然语言进行人机界面联系,这些模糊条件语句容易加到过程的控制环节上。 5.2模糊控制的缺点 (1)信息简单的模糊处理将导致系统的控制精度降低和动态品质变差; (2)模糊控制的设计尚缺乏系统性,无法定义控制目标。 6?模糊数学 模糊数学就是利用数学知识研究和解决模糊现象。在数学和模糊现象之间架起了一座桥梁。 6.1模糊集合的概念 每一个概念都有内涵和外延。 内涵就是指概念的本质属性的集合。外延就是符合某种本质属性的全体对象的集合。模糊数学的基础就是模糊理论集。 在模糊集合设计到的论域U上,给定了一个映射A, A:U T[O, 1] ,x 一〃A(X),则称A为论域U上的模糊集合或者模糊子集;〃A(X)表示U 中各个元素x属于集合A的程度,称为元素x属于模糊集合A的隶属函数。当x是一个确定的忌时,称仏(忌)为元素毛对于模糊集合A 的隶属度。 F集合引出的几个概念 1)模糊数:支集,Supp A={x | XG U,A(X)>0}称为Supp A为F集合A 的支集。(supporter)。Ker A={x xwU, A(x)二1}则称Ker A 为F 集合A的核 模糊控制的应用实例 与分析 模糊控制的应用 学院实验学院 专业电子信息工程 姓名 指导教师 日期 2011 年 9 月 20 日 在自动控制中,包括经典理论和现代控制理论中有一个共同的特点,即控制器的综合设计都要建立在被控对象准确的数学模型(如微分方程等)的基础上,但是在实际工业生产中,很多系统的影响因素很多,十分复杂。建立精确的数学模型特别困难,甚至是不可能的。这种情况下,模糊控制的诞生就显得意义重大,模糊控制不用建立数学模型,根据实际系统的输入输出的结果数据,参考现场操作人员的运行经验,就可对系统进行实时控制。模糊控制实际上是一种非线性控制,从属于智能控制的范畴。现代控制系统中的的控制能方便地解决工业领域常见的非线性、时变、在滞后、强耦合、变结构、结束条件苛刻等复杂问题。可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。 所谓模糊控制,其定义是是以模糊数学作为理论基础,以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的一种控制。模糊控制具有以下突出特点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是 现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制 对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 实验名称 一.实验目的 1.了解掌握传统PID控制原理及其基本的参数整定方法; 2.了解掌握模糊控制原理及其优缺点; 3.了解掌握神经网络原理及其优缺点; 4.掌握将传统PID控制与模糊控制结合、传统PID控制与神经网络控制 结合以及将传统PID控制、模糊控制与神经网络控制三者结合起来有 效地解决控制问题。 二.实验容 1.分别改变PID参数中的Kp,Ti,Td,比较PID参数对控制系统的影响; 2.选取Ziegler-Nichols法则对传统PID经行参数整定; 3.选取合适的隶属度函数设计模糊控制PID; 4.选取一种合适方式,设计神经网络与模糊控制结合的PID控制器。 三.实验原理 1.常规PID原理 常规PID控制系统框图如图3-1所示。控制系统由PID控制器和被对象组成。 图3-1.传统PID控制系统原理图 PID控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成 控制偏差 将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,其控制规律为 或写成传递函数形式: 式中:Kp——比例系数;Ti——积分时间常数;Td微分时间常数; 2.Ziegler-Nichols法则整定PID 基于临界增益Kcr和临界周期Pcr的2. Ziegler-Nichols整定法则 控制器类型Kp Ti Td P 0.5Kcr ∞0 PI 0.45Kcr 0.83Pcr 0 PID 0.6Kcr 0.5Pcr 0.125Pcr 3.模糊PID控制器设计原理 模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机智能控制。模糊控制的基本原理框图如图3-2所示。它的核心部分为模糊控制器,模糊控制器的控制规律由计算机的程序实现。实现一步模糊控制算法的过程描述如下:微机经终端采样获取被控制量的精确值,然后将此量与给定值比较得到偏差信号E,一般选偏差信号E作为模糊控制器的一个输入量。把偏差信号E的精确量进行模糊化变成模糊量。偏差E的模糊量可用相应的模糊语言表示,得到偏差E的模糊语言集合的一个子集e,再由e和模糊控制规则R(模糊算子)根据推理的合成规则进行模糊决策,得到模糊控制量U。 本科生毕业论文(设计) 调研报告 题目:基于模糊控制算法的 温度控制系统的设计学生姓名: 学号: 专业班级: 指导教师: 完成时间:年月日 基于模糊控制算法的温度控制系统的设计 一、主要目标任务: 综合运用所学知识,如《模拟电子技术》、《数字电子技术》、《自动控制原理》、《微机原理》、《单片机原理与应用》,设计一个基于模糊控制算法的温度控制系统。 1)对以前所学知识进行系统的复习,全面的综合并将其联贯。 2)学会了独立的分析和解决问题和进行相关社会调查的能力 3)学会了查阅文献的方法和培养查阅文献的良好习惯。 4)提高专业相关外文的阅读、翻译能力。提高专业英语水平。 5)提高编写程序的水平,优化软件结构。提高电脑绘图水平。 二、技术性能指标: 1)温度控制在0~100度(水温),误差为±0.5。C。 2)恒温控制。 3)LED实时显示系统温度。并通过键盘输入给定温度 三、简要工作原理 以AT89C51单片机为模糊控制器,结合温度传感变送器,A/D转换器、LED显示器、静态电子开关等,设计出一个基于模糊控制算法的温度控制系统。 在系统中,温度传感变送器获得温度的感应电压,转变成1~5V的标准电压信号,再由A/D转换器转换成数字信号进入单片机内部。单片机将给定电压的A/D转换结果与测量电压的结果相比较,得出偏差量。然后跟据模糊控制算法得出控制量。在执行器中由开关频率较高的静态电子开关完成,采用模拟的PWM控制方法,改变同一个周期中电子开关的闭合时间。 从而调节加热开关的导通时间,以达到控制效果的目的。 四、课题文献综述 1、《动力锅炉燃烧系统的模糊控制策略》 1)作者:刘向杰、柴天佑、刘红波 2)摘要:基于模糊控制策略给出了锅炉系统新的控制方法。工业锅炉的主要动态包括非线性、非最小相位特征、不稳定性、时滞和负荷干扰,采 用传统控制方法难以实施有效的控制。运用GPE(Gausian partition with evenly spaced midpoints)模糊控制系统对锅炉对象的主汽压进行研究和 实时控制,模糊控制器能够克服许多干扰因素,产生良好的控制效果, 最后给出了模糊控制同传统方法的比较结果。 3)模糊控制器的应用 本文的线性推理规则表示:IF error is Ej and rate is Rj THEN output is U(i+j)。Ei代表着一个误差模糊,Rj代表一个误差变化率模糊集,U(i+j)代表着一个输出量模糊集。 4)实施结果 上述控制策略用于现场实际对象,尽管现场运行存在很大的干扰,主 一、速度控制算法: 欧阳学文 首先定义速度偏差50 km/h≤e(k)≤50km/h,20≤ec(i)=e(k)e(k1)≤20,阀值eswith=10km/h 设计思想:油门控制采用增量式PID控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e(k)<0 ①e(k)>eswith and throttlr_1≠0 选择油门控制 ②否则:先将油门控制量置0,再选择刹车控制 0 E、ec和u均取离散度n=3,离散化后得到三个量的语言值论域分别为: E=EC=U={3,2,1,0,1,2,3} 其对应语言值为{NB,NM,NS,ZO,PS,PM,PB} 2.确定隶属度函数 E/EC和U取相同的隶属度函数即: 说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略 实际EC和E输入值若超出论域范围,则取相应的端点值。 3.模糊控制规则 由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC和U语言值隶属度向量表 设置模糊规则库如下表: 表2:模糊规则表 U E EC —NB NM NS ZO PS PM PB NB PB PB PM PM PS ZO ZO NM PB PM PM PS ZO ZO NS NS PM PM PS PS ZO NS NS ZO PM PS PS ZO ZO NS NM PS PS PS ZO ZO ZO NS NM PM PS ZO ZO ZO NS NM NB PB ZO ZO ZO NS* NM NM NB 3.模糊推理 由模糊规则表3可以知道输入E与EC和输出U的模糊关系,这里我取两个例子做模糊推理如下: if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为: 其中,,即表1中NB对应行向量,同理可以得到, , if (E is NVB or NB) and (EC is NVB) then (U is PVB) 结果略 按此法可得到27个关系子矩阵,对所有子矩阵取并集得到模糊关系矩阵如下: 由R可以得到模拟量输出为: 4.去模糊化基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
模糊控制详细讲解实例之欧阳歌谷创作
模糊控制的应用实例与分析
模糊控制
模糊控制器设计的基本方法
选取一个模糊控制的实例讲解
模糊控制优缺点
模糊控制的基本原理
模糊控制器设计的基本方法
模糊控制发展前景分析
matlab下模糊控制器设计步骤
模糊控制的优缺点
模糊控制的应用实例与分析资料讲解
模糊神经网络PID设计方法及其优缺点
基于模糊控制算法的温度控制系统的设计(DOC)
模糊控制详细讲解实例