基于Matlab的车灯线光源优化设计的实施方案

数学建模
基于Matlab 的车灯线光源优化设计的实施方案3欧宜贵 李志林 (海南大学信息学院应用数学系 海口 570228)摘要 给出了2002年全国大不生数学建模竞赛题“车灯线光源的优化设计”的实施方案,说明计算机仿真方法在数学建模中的有效性.
关键词 数学建模;计算机仿真;优化设计;Matlab6.0 中图法分类号 O242;TP311
2002年全国大学生数学建模竞赛题“车灯线光源的优化设计”是一道从实际问题提炼简化而来的数学问题.由于理论上的困难,很难得到满足设计要求的最优长度的线光源[1].本文借助科学运算语言Matlab610,[2]采用计算机仿真技术,求得满足设计要求的近似最优线光源的长度,体现了数学建模中计算机仿真方法的重要性.
1 问题重述
安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方,其开口半径36毫米,深度21.6毫米.经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源.要求在某一设计规范标准下确定线光源的长度.该设计规范在简化后可描述如下:
在焦点F 正前方25米处的A 点放置一测试屏,屏与FA 垂直,用以测试车灯的反射光.在屏上过A 点引出一条与地面相平行的直线,在该直线A 点的同侧取B 点和C 点,使A C =2AB =2.6米.要求C 点的光强度不小于某一额定值(可取为1个单位),B 点的光强度不小于该额定值的两倍(只须考虑一次反射).在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小.
21问题分析
由于线光源是均匀分布的,要使线光源功率最小,其长度也应该较小.但若线光源的长度太小,有可能出现C 点的光强度小于额定值;若线光源的长度过大,虽然能同时满足B 、C 两点光强度的要求,但线光源的功率也增大了.我们的目的就是在B 、C 两点光强度满足题目要求的情况下,求出最优的线光源长度,又由于到达屏上某一点的光线数目与该点的光强度成正比,因此,可以将题中条件转化为:到达C 点的光线数目不小于某一额定值,到达B 点的光线数目不小于该额定值的两倍.
另一方面,在抛物线上任取一点,并利用光路的可逆性,分别求出能够到达B 点和C 点的入射光线方程.若入射光线与线光源所在直线的交点的纵坐标的绝对值不大于线光源长度的一半,即与线光源有交点,则表示该光线经反射后能够到达屏上的B 点或C 点.这可通过计算机仿真来实现.
3、模型的基本假设
(1)线光源看成是无数个点光源叠加而成;
(2)不考虑光在抛物面上的折射,并且光在传播过程中,其强度不受空气的影响;
(3)不考虑车灯前配置镜面对反射光方向的影响.
4、模型的建立及求解
以抛物面的顶点为原点O ,对称轴为x 轴,过点O 且与线光源平行的直线为y 轴,过顶点且与x 轴、y 轴垂直的直线为z 轴,建立空间直角坐标系.由题中所给数据可求得旋转抛物面的方程是:60x =y 2+z 2.根据光路的几何原理和空间解析几何的知识,易推出结论:
线光源发出的光线经抛物面反射后若能到达B 、C 两点,则反射点应在抛物线60x =y 2上.如
701Vol.9,No.4J ul.,2006 高等数学研究STUDIES IN COLL EGE MA T H EMA TICS 3收稿日期:2004-10-01
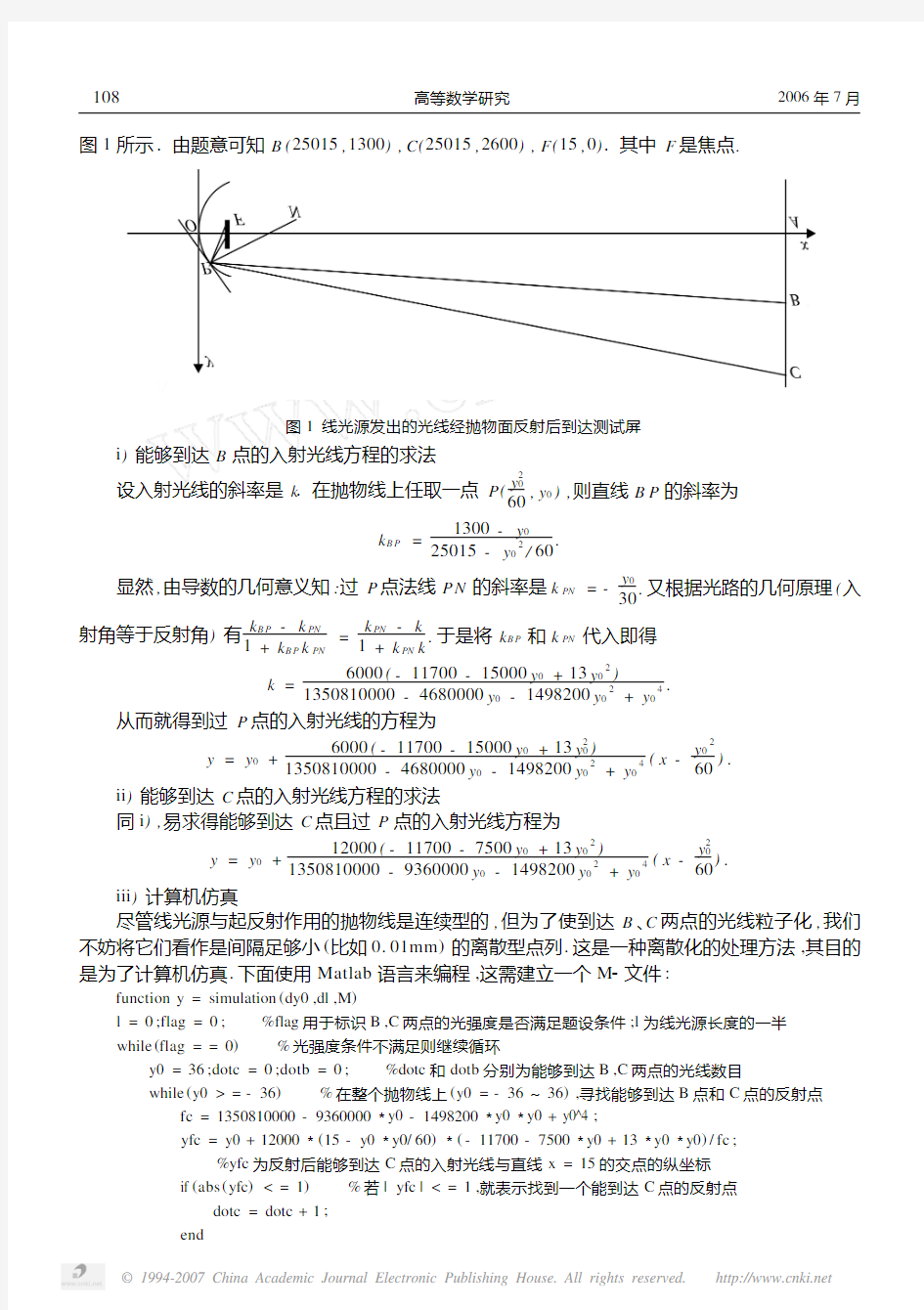
图1所示1由题意可知B (25015,1300),C (25015,2600),F (15,0)1其中F 是焦点
.
图1 线光源发出的光线经抛物面反射后到达测试屏
i )能够到达B 点的入射光线方程的求法
k 1在抛物线上任取一点P (
y 2060,y 0),则直线B P 的斜率为k B P =1300-y 025015-y 02/60
.显然,由导数的几何意义知:过P 点法线P N 的斜率是k PN =-
y 030.又根据光路的几何原理(入射角等于反射角)有k B P -k PN 1+k B P k PN =k PN -k 1+k PN k
.于是将k B P 和k PN 代入即得k =6000(-11700-15000y 0+13y 02)1350810000-4680000y 0-1498200y 02+y 04
.从而就得到过P 点的入射光线的方程为
y =y 0+6000(-11700-15000y 0+13y 20)1350810000-4680000y 0-1498200y 02+y 04
(x -y 0260).ii )能够到达C 点的入射光线方程的求法
同i ),易求得能够到达C 点且过P 点的入射光线方程为
y =y 0+12000(-11700-7500y 0+13y 02)1350810000-9360000y 0-1498200y 02+y 04
(x -y 2060).iii )计算机仿真
尽管线光源与起反射作用的抛物线是连续型的,但为了使到达B 、C 两点的光线粒子化,我们不妨将它们看作是间隔足够小(比如0.01mm )的离散型点列.这是一种离散化的处理方法,其目的是为了计算机仿真.下面使用Matlab 语言来编程,这需建立一个M 2文件:
function y =simulation (dy0,dl ,M )
l =0;flag =0; %flag 用于标识B ,C 两点的光强度是否满足题设条件;l 为线光源长度的一半
while (flag ==0) %光强度条件不满足则继续循环
y0=36;dotc =0;dotb =0; %dotc 和dotb 分别为能够到达B ,C 两点的光线数目
while (y0>=-36) %在整个抛物线上(y0=-36~36),寻找能够到达B 点和C 点的反射点
fc =1350810000-93600003y0-14982003y03y0+y0^4;
yfc =y0+120003(15-y03y0/60)3(-11700-75003y0+133y03y0)/fc ;
%yfc 为反射后能够到达C 点的入射光线与直线x =15的交点的纵坐标
if (abs (yfc )<=1) %若|yfc |<=1,就表示找到一个能到达C 点的反射点
dotc =dotc +1;
end
801高等数学研究 2006年7月
fb =1350810000-46800003y0-14982003y03y0+y0^4;
yf b =y0+60003(15-y03y0/60)3(-11700-150003y0+133y03y0)/f b ;
%yf b 为反射后能够到达B 点的光线与直线x =15的交点的纵坐标
if (abs (yf b )<=1) %若|yf b |<=1,就表示找到一个能到达B 点的反射点
dotb =dotb +1;
end
y0=y0-dy0; %dy0表示步长
end
if (dot >=M )&(dotb >=23M ) %判断光线的数目是否满足题设条件
flag =1;
end
l =l +dl ; %dl 表示点光源间的间隔
end
l ;dotc ;dotb ;经反复实验比较,可以找到满足设计要求的最优线光源长度约为L =2l =2×1.97=3.94mm (对应于dy0=0.01mm ,dl =0.01mm ,M =1670).此时,光线到达B 、C 两点的光强度之比2:1,完全符合题设条件.
参考文献
[1]谭永基.车灯灯丝长度优化设计的数学模型和数值模拟[J ].工程数学学报,2003,20(5):65~70.
[2]王沫然.Matlab6.0与科学计算[M ].北京:电子工业出版社,2001.
简 讯全国教育数学学会理事会暨学术年会召开
(本刊编辑部报道)中国高等教育学会教育数学专业委员会(简称全国教育数学学会)第一届三次理事会暨2006年学术年会,于5月13日至14日在西安召开,会议由陕西教育学院组织承办.学会理事长、广州大学教授张景中院士、中科院数学与系统科学研究院研究员林群院士,以及来自全国二十多个省市五十多个单位约百名代表参加了会议.
会议开幕式后,张景中院士作了题为《超级画板自由行》的报告,介绍并展示了由他主持开发的“超级画板”软件,它具有功能多、资源丰富、学得快、易上手的特点,而且人性化、动态化,使用方便.以往人们使用“几何画板”等软件,人要听从计算机的指令,而“超级画板”的设计思想是计算机听从人的安排,能“察言观色”,真正实现了动态几何的智能化.林群院士为大会作了《微积分新版》的报告,提供了微积分教学的一种新思维,采用全可微定义导数,拉近了条件和结论之间的距离,使复杂的证明变得简单,为微积分教学改革提供了一种非常好的思路.此外,清华大学韩云瑞教授就《教育数学对大学数学教育的启示》、西北大学曲安京教授就《数学的理由》、陕西师范大学杜鸿科教授就《教育数学和数学基础教育课程改革》等,分别作了大会报告.大会收到论文40多篇,与会代表分为高师院校组、理工科院校组和中小学组三个组进行了报告交流,经组织有关专家评选出了21篇优秀论文,其中一等奖7篇.会上,代表们还就成立学会的专业小组、创办期刊、编写教材以及教育数学的研究内容和方法等问题,进行了热烈讨论.北京大学数学学院徐庆和老师还在会上作了“教育数学网工作报告.”
常务理事会选举产生了新增补的常务理事、理事和副秘书长,通过批准了新会员.为了便于学会开展工作,常务理事会讨论决定,成立高师数学组、理工科数学组、中小学数学组和教育技术组等四个专业小组,分别由吴康、刘太顺、张雄和张志青任组长.常务理事会还讨论了有关学会网站建设、出版论文或丛书等事项.
9
01第9卷第4期 欧宜贵,李志林:基于Matlab 的车灯线光源优化设计的实施方案
matlab优化设计
MATLAB优化设计 学院:机电学院 专业:机械设计制造及其自动化 班级:072&&&-** 学号:20131****** 姓名:大禹 指导老师:祯 2015年10月25日
题目 1 1、求解如下最优化问题 步骤一:对已有的数学模型matlab 编程 1. 编写.m 文件并保存: h=[2 ,-2;-2, 4]; %实对称矩阵 f=[-2;-6]; %列向量 a=[1, 1;-1, 2]; %对应维数矩阵 b=[2;2]; %列向量 lb=zeros(2, 1); [x,value]=quadprog(h, f, a ,b ,[] ,[], lb) 2. 运行.m 文件结果如图1.0所示: subject to 2 21≤+x x 22-21≤+x x 0 21≥x x ,2 2 2121212262)(m in x x x x x x x f +-+--=
图1.0题目一文件运行结果 步骤二:matlab运行结果分析阶段 由图1.0知,当x1=0.8,x2=1.2时,min f (x)= -7.2。 题目 2 2、某农场拟修建一批半球壳顶的圆筒形谷仓,计划每座谷仓容积为300立方米,圆筒半径不得超过3米,高度不得超过10米。半球壳顶的建筑造价为每平方米150元,圆筒仓壁的造价为每平方米120元,地坪造价为每平方米50元,求造价最小的谷仓尺寸为多少?
步骤一:题目分析阶段 设:圆筒的半径为R,圆筒的高度为H 。 谷仓的容积为300立方米,可得: 3003 232=+R H R ππ 圆筒高度不得超过10米,可得: 100≤≤H 圆筒半径不得超过3米,可得: 30≤≤R 当造价最小时: 2225021202150),(m in R H R R H R f πππ+?+?= 步骤二:数学模型建立阶段 2 225021202150),(m in R H R R H R f πππ+?+?=
基于 Matlab 的车灯线光源优化设计的实施方案
数学建模 基于Matlab 的车灯线光源优化设计的实施方案3欧宜贵 李志林 (海南大学信息学院应用数学系 海口 570228)摘要 给出了2002年全国大不生数学建模竞赛题“车灯线光源的优化设计”的实施方案,说明计算机仿真方法在数学建模中的有效性. 关键词 数学建模;计算机仿真;优化设计;Matlab6.0 中图法分类号 O242;TP311 2002年全国大学生数学建模竞赛题“车灯线光源的优化设计”是一道从实际问题提炼简化而来的数学问题.由于理论上的困难,很难得到满足设计要求的最优长度的线光源[1].本文借助科学运算语言Matlab610,[2]采用计算机仿真技术,求得满足设计要求的近似最优线光源的长度,体现了数学建模中计算机仿真方法的重要性. 1 问题重述 安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方,其开口半径36毫米,深度21.6毫米.经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源.要求在某一设计规范标准下确定线光源的长度.该设计规范在简化后可描述如下: 在焦点F 正前方25米处的A 点放置一测试屏,屏与FA 垂直,用以测试车灯的反射光.在屏上过A 点引出一条与地面相平行的直线,在该直线A 点的同侧取B 点和C 点,使A C =2AB =2.6米.要求C 点的光强度不小于某一额定值(可取为1个单位),B 点的光强度不小于该额定值的两倍(只须考虑一次反射).在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小. 21问题分析 由于线光源是均匀分布的,要使线光源功率最小,其长度也应该较小.但若线光源的长度太小,有可能出现C 点的光强度小于额定值;若线光源的长度过大,虽然能同时满足B 、C 两点光强度的要求,但线光源的功率也增大了.我们的目的就是在B 、C 两点光强度满足题目要求的情况下,求出最优的线光源长度,又由于到达屏上某一点的光线数目与该点的光强度成正比,因此,可以将题中条件转化为:到达C 点的光线数目不小于某一额定值,到达B 点的光线数目不小于该额定值的两倍. 另一方面,在抛物线上任取一点,并利用光路的可逆性,分别求出能够到达B 点和C 点的入射光线方程.若入射光线与线光源所在直线的交点的纵坐标的绝对值不大于线光源长度的一半,即与线光源有交点,则表示该光线经反射后能够到达屏上的B 点或C 点.这可通过计算机仿真来实现. 3、模型的基本假设 (1)线光源看成是无数个点光源叠加而成; (2)不考虑光在抛物面上的折射,并且光在传播过程中,其强度不受空气的影响; (3)不考虑车灯前配置镜面对反射光方向的影响. 4、模型的建立及求解 以抛物面的顶点为原点O ,对称轴为x 轴,过点O 且与线光源平行的直线为y 轴,过顶点且与x 轴、y 轴垂直的直线为z 轴,建立空间直角坐标系.由题中所给数据可求得旋转抛物面的方程是:60x =y 2+z 2.根据光路的几何原理和空间解析几何的知识,易推出结论: 线光源发出的光线经抛物面反射后若能到达B 、C 两点,则反射点应在抛物线60x =y 2上.如 701Vol.9,No.4J ul.,2006 高等数学研究STUDIES IN COLL EGE MA T H EMA TICS 3收稿日期:2004-10-01
基于MATLAB的优化设计
基于MATLAB的曲柄摇杆机构优化设计 1.问题的提出 根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三种问题:(1)满足预定的运动规律要求;(2)满足预定的连杆位置要求;(3)满足预定的轨迹要求。在在第一个问题 里按照期望函数设计的思想,要求曲柄摇杆机构的曲柄与摇杆转角之间按照φ=f(?)(称为期望函数)的关系实现运动,由于机构的待定参数较少,故一 般不能准确实现该期望函数,设实际的函数为φ=F(?)(称为再现函数),而再 现函数一般是与期望函数不一致的,因此在设计时应使机构再现函数φ=F(?) 尽可能逼近所要求的期望函数φ=f(?)。这时需按机械优化设计方法来设计曲 柄连杆,建立优化数学模型,研究并提出其优化求解算法,并应用于优化模型的求解,求解得到更优的设计参数。 2.曲柄摇杆机构的设计 在图1所示的曲柄摇杆机构中,l1、l2、l3、l4分别是曲柄AB、连杆BC、摇杆CD和机架AD的长度。这里规定?0为摇杆在右极限位置φ0时的曲柄起始 位置角,它们由l1、l2、l3和l4确定。 图1曲柄摇杆机构简图 设计时,可在给定最大和最小传动角的前提下,当曲柄从?0转到?0+90?时,要求摇杆的输出角最优地实现一个给定的运动规律f(?)。这里假设要求: (?-?0)2(1)φE=f(?)=φ0+2 3π
s=30;qb=1;jj=5;fx=0; fa0=acos(((qb+x(1))^2-x(2)^2+jj^2)/(2*(qb+x(1))*jj)); %曲柄初始角 pu0=acos(((qb+x(1))^2-x(2)^2-jj^2)/(2*x(2)*jj));%摇杆初始角for i=1:s fai=fa0+0.5*pi*i/s; pui=pu0+2*(fai-fa0)^2?(3*pi); ri=sqrt(qb^2+jj^2-2*qb*jj*cos(fai)); alfi=acos((ri^2+x(2)^2-x(1)^2)/(2*ri*x(2))); bati=acos((ri^2+jj^2-qb^2)(/2*ri*jj)); if fai>0&fai<=pi psi=pi-alfi-bati; elseif fai>pi&fai<=2*pi psi=pi-alfi+bati; end fx=fx+(pui-psi)^2; end f=fx; (2)编写非线性约束函数M文件confun.m function[c,ceq]=confun(x); qb=1;jj=5;m=45*pi/180;n=135*pi/180; c(1)=x(1)^2+x(2)^2-(jj-qb)^2-2*x(1)*x(2)*cos(m); %最小传动角约束c(2)=-x(1)^2-x(2)^2+(jj+qb)^2+2*x(1)*x(2)*cos(n); %最大传动角约束ceq=[]; (3)在MATLAB命令窗口调用优化程序 x0=[6;4]; lb=[1;1]; ub=[]; %线性不等式约束 a=[-1-1;1-1;-11];b=[-6;4;4];[x,fn]=fmincon(@optimfun, x0,a,b,[],[],lb,ub,@confun); (4)运行结果
数学建模(路灯)
数学模型实验论文
路灯安置优化问题 一、摘要: 现代社会,经济不断发展人民生活水平不断提高,国家采取了一系列的措施让人民生活得更舒适,而在路上安装路灯就是其中一项重要的举措。这里我从一盏灯的照明情况的分析出发,研究怎样合理的设计路灯的度和路灯之间的间距才能满足人们的需求。首先分析路灯照明的特性,然后建立一盏灯时面积使最大的模型及两盏灯时时路灯间距最大的模型,在此基础上建立一排路灯及两排路灯的数学模型,分析两种情况何时须灯数最少即最节约能源,其中由实际情况和生活经验来看,两排灯时交错分布照明是比较均匀的,所以在两排灯时考虑灯交错分布的情况。 关键词: 照明强度、路灯设计、路灯高度、间距的优化 二、问题的提出: 目前大多数公共场所都安装了路灯,路灯的高度和路灯之间的间距一般是依靠经验进行设置的,并没有从优化的角度进行考虑。在能源日益减少的今天,我们应该考虑怎样尽可能的节约能源,并且作为路段整体设计的一部分路灯的安排也直接影响到社会公共环境。经过对我校校园内几条道路的路灯设计的观察,对校园整体室外照明有了一定的了解。在调查时A路正在安装路灯,为获取数据的方便取该路段为研究对象。
三、背景知识: 1.光强度:光源在一定范围内发出可见光辐射强弱的物理量。以光源在某一方向上单位立体角辐射的能量来量度。(单位:坎德拉) 2.照度:单位面积上得到的光通量。(单位:勒克司) 3.通量:人眼所能感觉到的光辐射的功率。单位时间光辐射的能 和相对视见率的乘积。(单位:流明) 4.对于眼睛最敏感的 波长的黄绿光来说,1流明相当于1/685瓦特。一般常见或需要的照度:晴朗夏天室外背荫处得照度为1000-10000流明。 5.为保证在该路段上处处都能有满足正常活动需要的照明强度,取照度的最小值为 ,即为13700流明。 6.照度定律:点光源O 预备照明平面中心A 的距离为h 时,平面上A 点的照度。 符号规定: p 为 O 点的光强度,a 为平面的法线方向与光源到A 点的连线之间的夹角,h 为光源的高度,l 为光源到A 点的距离。 四、模型的假设: 1. 假设高度和间距的优化问题为简化模型设路灯的额定功率为定值(注:数据来源 A 路的路灯标签额定功率为220伏,额定电流为10安,所以取额定功率)。 m 7105.5-?2/20m w
机械优化设计MATLAB程序文件
机械优化设计作业1.用二次插值法求函数()()()22 ?极小值,精度e=0.01。 t t =t 1- + 在MATLAB的M文件编辑器中编写的M文件,如下: f=inline('(t+1)*(t-2)^2','t') a=0;b=3;epsilon=0.01; t1=a;f1=f(t1); t3=b;f3=f(t3); t2=0.5*(t1+t3);f2=f(t2); c1=(f3-f1)/(t3-t1); c2=((f2-f1)/(t2-t1)-c1)/(t2-t3); t4=0.5*(t1+t3-c1/c2);f4=f(t4); k=0; while(abs(t4-t2)>=epsilon) if t2
运行结果如下: 迭代计算k= 7 极小点坐标t= 2 函数值f=0.0001 2.用黄金分割法求函数()32321+-=t t t ?的极小值,精度e=0.01。 在MATLAB 的M 文件编辑器中编写的M 文件,如下: f=inline('t^(2/3)-(t^2+1)^(1/3)','t'); a=0;b=3;epsilon=0.01; t1=b-0.618*(b-a);f1=f(t1); t2=a+0.618*(b-a);f2=f(t2); k=1; while abs(b-a)>=epsilon if f1 车灯线光源的优化设计 摘要 题目要求我们针对确定的设计规范,计算线光源的长度,然后再根据线光源的长度讨论该设计规范是否合理。 针对题目的任务,我们采用物理光学的知识和数学极限思想建立模型,根据题目的要求对线光源反射在屏幕上的光照强度进行了研究,并按照要求完成了线光源的优化设计。 对于问题一,采用了对线光源无限分割成线元的点光源的极限思想,并求出每个点光源经抛物面反射后照在测试屏幕上的光照强度,在B ,C 两点利用区 域法将圆区域的光照强度的和代替点的光照强度,再根据B , C 光照强度的关系,最后求得: l =4mm 对于问题二,在问题一的基础上可以利用matlab 将带坐标的亮区绘出来,(结果见图5,第7页) 对于问题三,夜晚行车司机在看清障碍物时,从反应到到制动停止的距离为h ,其取值范围是: 23.6926.69m h m ≤≤ 取26.69h m =>25m ,所以我们希望设计规范能够将25m 提高到30m 以外,提高司机的人身安全,同时考虑强度问题,为了确保在在30m 外能够辨出障碍物,屏幕上相应的B 和C 点的距离也要相应提高,并且线光源的长度也要适当增长,以确保有足够的强度。(具体长度呢?) 关键词:数学无限分割极限思想 光照度平方反比定理 光照强度 一、问题的重述 1.1问题背景 安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方, 其开口半径36mm,深度21.6mm。经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源。要求在某一设计规范标准下确定线光源的长度。 1.2目标任务 该设计规范在简化后可描述如下。在焦点F正前方25m处的A点放置一测试屏,屏与FA垂直,用以测试车灯的反射光。在屏上过A点引出一条与地面相平行的直线,在该直线A点的同侧取B点和C点,使AC=2AB=2.6m。要求C点的光强度不小于某一额定值(可取为1个单位),B点的光强度不小于该额定值的两倍(只须考虑一次反射)。解决如下问题: (1)在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小。(2)对得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区。(3)讨论该设计规范的合理性。 二、问题分析 该问题属于物理学中的光学问题,对于线光源发射出来的光为无数条,我们无法运用整体思想进行建立模型。 对于问题一,我们运用无限分割成微元的极限思想,将线光源分成无限n (n=1,2,3…)份线元,然后计算出每份线元经过车灯抛物面反射后射在测光屏上的光照强度 E,进而可以对光照强度在,B C两点的极小区域进行求和,最后 n 要使线光源的发光功率最小,尽量满足B点处的光照强度接近C点处的两倍,由光照强度,功率与线光源之间个光线可以求出线光源的最小长度。 对于问题二,在问题一的基础上,在计算线元的光照强度时模拟光线的反射可得到反射光的亮区图。 对于问题三,结合实际与计算结果,以夜间行车的安全性讨论设计规范的合理性。 最后由模型和结果对该规范的合理性进行讨论修改。 三、基本假设 1.假设光线在经过抛物面反射所造成能量损失忽略不计,只考虑光线随距离的变化而产生的能量损失。 2.假设抛物面光滑,无凹凸不平,对光线无额外的作用,除了正常的反射。 3.由于要测试的,B C两点离屏幕A点距离远远大于旋转抛物面的最大口径故忽 略线光源对测光屏幕直射的光照强度,只考虑反射对测光屏幕光照强度的影响。 4.假设车灯发光均匀,光强均匀。 5.假设每份光线元经抛物面反射后,光强度为1个单位。 基于MATLAB的生产过程中最大利润问题的优化设计 2010-2011 学年一学期研究生课程考核 (读书报告、研究报告) 考核科目:现代设计理论与方法 学生所在院(系):机电工程学院 学生所在学科:车辆工程 姓名:陈松 学号:Y100201802 题目:基于MATLAB的生产过程中最大利润问题的优化设计 基于MATLAB的生产过程中最大利润问题的优化设计 在工厂编制生产计划中,使产品的计划利润最大是通常的目标。可是,在生产过程中,总是有种种条件的限制,使得我们的生产成本增多,从而导致利润并没有达到理想值。为了解决如何在有约束条件下解决最大利润的问题,我们通常将这些有约束的最优化问题转化为无约束最优化问题。而通过MATLAB现成的优化工具箱,我们可以通过调用最佳优化函数求解,从而更好的计算出生产产品所获得最大利润。 1.数学模型的建立 建立数学模型,即用数学语言来描述最优化问题,模型中的数学关系式反 映了最优化问题所要达到的目标和各种约束条件。而通过这些约束条件,我们能更好的制定新的生产计划,以便克服生产过程中的某些不利于生产的约束,从而更大的降低产品生产成本,使利润最大化。 1.1设计变量的确定 设计变量是指设计过程中可以进行调整和优选的独立参数,分为连续变量和离散变量。而本文主要用的是连续变量,设计变量一般表示为: 式中,X i 表示生产产品的台数,而当我们确定了生产每台的利润后,我们 就能知道X i 台的利润。 1.2目标函数的确定 已知某工厂能生产A、B、C三种产品,每月生产的数量分别为X 1,X 2 , X 3,产品每台利润分别为m 1 ,m 2 ,m 3 ,则可知该厂每月的利润为: Y= m 1 *X 1 + m 2 *X 2 + m 3 *X 3 即目标函数为: X * m + X * m + X * m ) ( 3 3 2 2 1 1 = X F 简化为: F(X)= i i X M*i=1,2,3 1.3约束条件的建立 生产A、B、C三种产品需用到四种机器V1、V2、V3、V4,每种机器的生产能力分别为K1、K2、K3、K4,所以有: 1)用V1每月生产的A、B、C三种部件分别为N1、N2、 N3,则:g 1(x)=N1*X 1 +N2*X 2 +N3*X 3 ≤K1 2)用V2每月生产的A、B、C三种部件分别为N11、N12、 N13,则:g 2(x)=N11*X 1 +N12*X 2 +N13*X 3 ≤K2 3)用V3每月生产的A、B、C三种部件分别为N21、N22、N23, 则:g 3(x)=N21*X 1 +N22*X 2 +N23*X 3 ≤K3 校园路灯问题优化 一、问题描述 1.问题背景 路灯已成为夜晚比不可少的工具,不管是在街道,还是校园都随处可见。随着路灯的增加,如何合理解决路灯问题便成为一个重要问题。在能源日益减少的今天,我们应该考虑怎样尽可能的节约能源,并且作为校园整体设计的一部分路灯的安排也直接影响到学校环境,对于夜晚校园环境的烘托具有非常重要的意义。 2. 主要问题 经过对校园内几条道路的路灯设计的观察,对校园整体室外照明有了一定的了解。 主要从三个方面优化校园路灯问题。主要侧重于其布局优化。 (1)校园路灯分布规划:在照明强度的要求已知时,寻求一种路灯安置方案,(选定合适的路灯高度、路灯之间的间距),使路灯的安置达到要求,同时路灯的数量尽可能减少,路灯的能耗达到最低。 (2)校园路灯开放时间优化。 (3)校园路灯维护优化。 3. 问题研究的意义 通过对路灯问题的研究,找到一种安置方案,优化现有路灯布局,使路灯能耗降低,以节省经济投入。 二、问题分析 要使能耗最小,在路灯功率一定的情况下,只能减少路灯的使用量。因此,在满足最低照明功率的前提下,通过改变路灯的高度来使路灯之间的距离达到最优是本问题的一个解决方案。 三、模型假设 (1)所有路灯都紧靠在路的边界线上,且照明效果都相同。光源是点光源。在单个光源照射下,距光源L的点的光照强度为C=f(L);在多光源照射下,某一点的光照强度为各光源对该点光照强度的代数和。道路处处等宽,路面上每一点的光照强度至少要达到C0。 (2)假设路灯为完全规范的,即处处等宽,一排路灯的宽度为,两排路灯的宽度为。 四、变量说明 1. 照度定律:点光源O的发光强度是,则距点光源O为的点的照度为 2. 参量变量说明: (1)设路灯的高度:h,路的宽度: (2)经过实际考察,路灯的功率:=2200W (3)路灯的间距: 机械优化设计在matlab中的应用 东南大学机械工程学院** 一优化设计目的: 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 " 二优化设计步骤: 1.机械优化设计的全过程一般可以分为如下几个步骤: 1)建立优化设计的数学模型; 2)选择适当的优化方法; 3)编写计算机程序; : 4)准备必要的初始数据并伤及计算; 5)对计算机求得的结果进行必要的分析。 其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。 2.建立数学模型的基本原则与步骤 ①设计变量的确定; — 设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。设计变量的全体实际上是一组变量,可用一个列向量表示: x=。 ②目标函数的建立; 选择目标函数是整个优化设计过程中最重要的决策之一。当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。 目标函数的一般表达式为: 。 f(x)=,要根据实际的设计要求来设计目标函数。 ③约束条件的确定。 一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。 由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为 2003年第18卷第4期 电 力 学 报 Vol.18No.42003 (总第65期) J OU RNAL OF EL ECTRIC POWER (Sum.65) 文章编号: 1005-6548(2003)04-0262-02 车灯线光源的优化设计 ———2002年全国大学生数学建模A题论文Ξ 郭 洋1, 常 哲1, 刘品贤1 (11山西大学工程学院,山西太原 030013) Optimum Design of H eadlight’s Filament ———Mathematical Contest in Modeling in2002 GUO Yang1, CHAN G Zhe1, L IU Pin2xian1 (11Engineering College of Shanxi University,Taiyuan 030013,China 030013,China) 摘 要: 根据设计规范的要求对线光源的最短长度进行了数值分析。首先用解析法建立了一个多元函数模型得出合理的数值,然后利用向量代数知识借助MA TLAB模拟出屏上的蝶形形状亮区。 关键词: 数学模型;多元函数;优化设计 中图分类号: O182 文献标识码: A Abstract: A numerical analysis of the shortest length of headlight’s filament is made in the paper. A multiplex function model is established on the basis of optical principle and then an extent is drawn in the light of MA TLAB. K ey Words: mathematical model;multiplex func2 tion;optimum design 1 题目描述 现知一汽车前灯的形状为旋转抛物面,开口半径36mm,深度21.6mm,其对称轴水平地指向正前方。经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源。要求在某一设计规范标准下确定线光源的长度。 该设计规范在简化后可描述如下。在焦点F 正前方25m处的A点放置一测试屏,屏与FA垂直,用以测试车灯的反射光。在屏上过A点引一与地面相平行的直线,在该直线A点的同侧取B点和C点,使A C=2A B=2.6m。要求C点的光强度不小于某一额定值(可取为1个单位),B点的光强度不小于该额定值的两倍(只须考虑一次反射)。 需要解决下列问题: a1在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小。 b1对得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区。 c1讨论该设计规范的合理性。 2 问题分析 a1问题要使线光源的功率最小,即可等效为线光源的长度最小。因为理想线光源可视为由无穷多个点光源组成,其功率相应等价为无穷多个点光源功率的积分。 b1光强是单位面积上通过的光通量,据此可知光强与发光点的发光功率成正比,与距离发光点的 Ξ收稿日期: 2003-06-27 作者简介: 郭 洋(1982-),男,河南南召人,山西大学工程学院动力工程系学生; 常 哲(1979-),男,山西芮城人,山西大学工程学院动力工程系学生; 刘品贤(1981-),男,浙江乐清人,山西大学工程学院动力工程系学生。 机械优化设计课程设计 题目:齿轮减速器最优化设计班级:机械班 成员 2013年6月19日 一.设计题目:二级斜齿圆柱减速器的最优化设计二.设计要求:要求减速器有最小的体积和最紧凑的结 构 三.原始数据: 四.设计内容 1.设计方案的拟定及说明 2.电动机的选择及参数计算 3.带轮的初选与计算 4.计算圆柱斜齿轮的输入转矩、传动比、转速,然 后建立数学模型编写matlab语言程序,运行 程序包括geardesign. m 齿轮系统设计主程序 Gearobjfun. m目标函数子程序 Gearconstr. m 约束条件子程序 Gearparameter.m许用应力计算子程序 5.输出结果 1.该减速器为二级斜齿圆柱减速器,低速级采用二级斜齿圆 柱齿轮传动,选择三相交流异步电动机,v带传动 2.确定电动机的容量: 选择电动机的容量应保证电动机的额定功率大于等于工作机所需要的功率 电动机参数t=60/40=1.5s v=s/t=6.0*10^-3m/s P=0.5FV=0.5*110*60*0.001=3.3kw 1.η=η1* η32*η23*η4*η5 其中齿轮传动η1=0.96滚动轴承η2=0.98齿轮传动η3=0.97联轴器η4=0.99卷筒η5=1.0 η=0.96*0.98^3*0.97^2*0.99*1.00=0.84 P d=3.3\0.84=2.93kw 三,确定电动机的转速 已知压片机的转速40piece/min带传动的传动比i1=2~4 二级齿轮减速器的传动比i2=8~40,所以电动机的转动范围n=i1i2n=640~6400r/min 可行方案如下 确定电动机的转速具体数据如下 计算减速器输入转矩T1,输入转速n,总传动比i 一、问题重述: 现代教育方式已由应试教育逐步向素质教育转变,借以培养学生的兴趣,增进师生之间的交流,营造良好的学习氛围。新的教育方式也对教师照明设计和规划提出了更高的要求。近些年又在倡导创建节约型社会,因此光源的选择需结合教室的通光条件已达到节能的目的。再者,教室光线分布的均匀程度及眩光作用也会影响学生的视觉效果,光线过强或过弱将导致视觉疲劳,从而影响课堂的学习效率。因此教室照明的设计显得尤为重要。 我们知道,白天上课学生的目光主要集中在黑板,而晚上自习时间则主要专注于书桌那一小范围区域。因此教室照明的设计必须考虑仔细和上课两种情况。晚自习主要考虑座位上方天花板上荧光灯的设计;白天上课主要考虑黑板照明的情况。 根据我国现行照度要求,教室的平均照度要求至少达到300勒克斯,教室黑板的照度要求达到500勒克斯(Lx)。(勒克斯是光照度的单位) 二、模型假设: 1.所有的荧光灯都是一样的,且都在同一水平面,灯到桌面的垂直距离都相等。 2.不考虑灯具的发光效率。 3.不考虑墙壁、窗户的反射作用。 4. 忽略荧光灯的宽度,把荧光灯看做是长度相等的线段。 5. 把教室的学生看做是理想化个体,不受情绪影响。 三、问题分析和模型建立: 相关参数如下: L:教室长度(12m) M:教室宽度(8m) H:灯距离课桌高度(2.8m) l1:荧光灯长度 l2:布灯纵向间距(2.1m) l3:布灯横向间距 (0.8m)Φ:光通量 U:利用系数 A:光照面积(L*M) K:灯具维护系数 Eav:光照度 照明节能:学校耗能主要来源于空调和照明,其中照明能耗占40% 左右,而教室照明占总照明耗能的80%。为达到节能的目的,选用T5 光源,直径只有16 毫米,节省了汞和荧光灯用量,同时节省了制灯 材料,有利于节能环保。 首先考虑晚上自习的情况: 利用系数法此方法考虑了由光源直接投射到工作面上的光通 量和经过室内表面相互反射再投射到工作面上的光通量。(仅适用于 均匀布灯,空间无大型设备阻挡的室内一般照明,教室满足利用系数 法的使用要求)由照度公式 Eav=NΦUK∕A,根据规范要求,平均照 度应达到300Lx(允许10%误差),已知光通量Φ为4800lm,面积A为 L*M=12×9=108m2,灯具维护系数K教室可取0.8,利用系数U,根据灯 具悬挂高度及墙面地面的材质情况,查阅灯具利用系数表,根据插值 法查取,U取0.6,则灯具个数N可推算出为12个,在12盏灯的情 况下,可计算平均照度Eav为288Lx,满足要求。 教室照明不仅要考虑平均照度,照明均匀度也至关重要。照明不 优化计算MATLAB程序 首先,将目标函数写成M文件,其程序语句如下; function f = fun (x) global K L thetamax alpha for i=1:61 f = 0 betae = atan(tan(alpha(i)/(1-(K/L)*tan(alpha(i)))); A(i)=2*x(1).^2*sin(x(2)+alpha(i)); B(i)=2*K*x(1)-2*x(1).^2*cos(x(2)+alpha(i)); C(i)=2*x(1).^2-4*x(1).^2*(cos(x(2)).^2+4*K*x(1)*cos(x(2))-2*K*x(1)* cos(x(2)+alpha(i)); theta3(i)= 2*acot((A(i)+sqrt(A(i).^2+B(i).^2-C(i).^2))/(B(i)+C(i))); beta(i)=x(2)+theta3(i)-pi; if alpha(i)<=pi/18 f(i)=1.5*abs(beta(i)-betae3(i)); elseif alpha>=pi/18,alpha(i)<=pi/9;f(i)=abs(betaa(i)-betae3(i)); elsef(i)=0.5*abs(beta(i)-betae3(i)); global K L thetamax alpha K=input L=input thetamax=input x0(1)=input x0(2)=input thetamax = thetamax*pi/180; x0(2)=x0(2)*pi/180;lb(1)=0.17K; lb(2)=0.17*K; ub(1)=acot(K/(1.2*L))ub(2)=pi/2; alpha=linspace (0, theamax ,61); lb=[lb(1),lb(2)]; ub=[ub(1),ub(2)];x(0)=[x0(1),x0(2)]; options = optimset ( ‘TolFun’,‘le-10’,‘TolCon’,‘le-6’) [x,resnorm] = lsqnonlin(‘fun’,x0,lb,ub,options) g lobal K L thetamax alpha K = input L= input thetamax= input x ( 1) = input x ( 2) = input thetamax = thetamax * pi/ 180; x ( 2) = x ( 2) * pi/ 180; alpha= linspace( 0, thetamax , 61) ; fo r i= 1∶61 betae= atan( tan( alpha( i) ) / (( 1- K/ L) * tan( alpha( i) ) ) ) ; A ( i) = 2* ( x ( 1) ) .∧2* sin ( x ( 2) + alpha( i) ) ; B( i) = 2* K* x( 1) - 2* ( x ( 1) ) . ∧2* cos( x( 2) + alpha( i) ) ) ; 1 预测模块:灰色预测、时间序列预测、神经网络预测、曲线拟合(线性回归); 2 归类判别:欧氏距离判别、fisher判别等; 3 图论:最短路径求法; 4 最优化:列方程组用lindo 或lingo软件解; 5 其他方法:层次分析法马尔可夫链主成分析法等; 6 用到软件:matlab lindo (lingo)excel ; 7 比赛前写几篇数模论文。 这是每年参赛的赛提以及获奖作品的解法,你自己估量着吧…… 赛题解法 93A非线性交调的频率设计拟合、规划 93B足球队排名图论、层次分析、整数规划 94A逢山开路图论、插值、动态规划 94B锁具装箱问题图论、组合数学 95A飞行管理问题非线性规划、线性规划 95B天车与冶炼炉的作业调度动态规划、排队论、图论 96A最优捕鱼策略微分方程、优化 96B节水洗衣机非线性规划 97A零件的参数设计非线性规划 97B截断切割的最优排列随机模拟、图论 98A一类投资组合问题多目标优化、非线性规划 98B灾情巡视的最佳路线图论、组合优化 99A自动化车床管理随机优化、计算机模拟 99B钻井布局0-1规划、图论 00A DNA序列分类模式识别、Fisher判别、人工神经网络 00B钢管订购和运输组合优化、运输问题 01A血管三维重建曲线拟合、曲面重建 01B 工交车调度问题多目标规划 02A车灯线光源的优化非线性规划 02B彩票问题单目标决策 03A SARS的传播微分方程、差分方程 03B 露天矿生产的车辆安排整数规划、运输问题 04A奥运会临时超市网点设计统计分析、数据处理、优化 04B电力市场的输电阻塞管理数据拟合、优化 05A长江水质的评价和预测预测评价、数据处理 05B DVD在线租赁随机规划、整数规划 优化设计 无约束优化 min f(x)= 21x +22x -21x 2x -41x 初选x0=[1,1] 程序: Step 1: Write an M-file objfun1.m. function f1=objfun1(x) f1=x(1)^2+2*x(2)^2-2*x(1)*x(2)-4*x(1); Step 2: Invoke one of the unconstrained optimization routines x0=[1,1]; >> options = optimset('LargeScale','off'); >> [x,fval,exitflag,output] = fminunc(@objfun1,x0,options) 运行结果: x = 4.0000 2.0000 fval = -8.0000 exitflag = 1 output = iterations: 3 funcCount: 12 stepsize: 1 firstorderopt: 2.3842e-007 algorithm: 'medium-scale: Quasi-Newton line search' message: [1x85 char] 非线性有约束优化 1. Min f(x)=321x +2 2x +21x -32x +5 Subject to: 1g (x)=1x +2x +18≤0 2g (x)=51x -32x -25≤0 3g (x)=131x -412 2x 0≤ 4g (x)=14≤1x 130≤ 5g (x)=2≤2x 57≤ 初选x0=[10,10] Step 1: Write an M-file objfun2.m function f2=objfun2(x) f2=3*x(1)^2+x(2)^2+2*x(1)-3*x(2)+5; Step 2: Write an M-file confun1.m for the constraints. function [c,ceq]=confun1(x) % Nonlinear inequality constraints c=[x(1)+x(2)+18; 5*x(1)-3*x(2)-25; 13*x(1)-41*x(2)^2; 14-x(1); x(1)-130; 2-x(2); x(2)-57]; % Nonlinear inequality constraints ceq=[]; Step 3: Invoke constrained optimization routine x0=[10,10]; % Make a starting guess at the solution >> options = optimset('LargeScale','off'); >> [x, fval] = ... fmincon(@objfun2,x0,[],[],[],[],[],[],@confun1,options) 运行结果: x = 3.6755 -7.0744 fval = 124.1495 MATLAB第12章工程优化设计实例 第12章工程优化设讣实例优化设讣的数学模型 优化设讣的数学模型是描述实际优化问题的设计内容、变量关系、有关设计条件和意图的数学表达式,它反映了物理现象各主要因素的内在联系,是进行优化设计的基础。优化设计数学模型的三大要素: ?设计变量 ?约束条件 ? LI标函数 1.设计变量 一个设计方案可以用一组基本参数的数值来表示,这些基本参数可以是构件尺寸等儿何量,也可以是质量等物理量,还可以是应力、变形等表示丄作性能的导出量。设计变量:在设讣过程中进行选择并最终必须确定的各项独立的基本参数,乂叫做优化参数。 设计变量的全体实际上是一组变量,可用一个列向量表示 2.约束条件 设计空间是所有设计方案的集合,但这些设计方案有些是工程上所不能接受 的。如一个设计满足所有对它提出的要求,就称为可行设计。 一个可行设讣必须满足某些设讣限制条件,这些限制条件称作约束条件,简称约 束。3.目标函数 为了对设计进行定量评价,必须构造包含设讣变量的评价函数,它是优化的口标, 称为LI标函数,以F(X)表示。 FxFxxx ()(),, , , 12n 在优化过程中,通过设计变量的不断向F(X)值改善的方向自动调整,最后求得 F(X)值最好或最满意的X值。在构造LI标函数时,应注意:訂标函数必须包含全部设计变量,所有的设计变量必须包含在约束函数中。 模型输入时需要注意的问题 使用优化工具箱时,山于优化函数要求口标函数和约束条件满足一定的格式,所以需要用户在进行模型输入时注意以下儿个问题: 1.目标函数最小化 优化函数 fminbnd、fminsearchx fminunc、fmincon、fgoalattdin、fminmax 和1 sqnonlin都要求LI标函数最小化,如果优化问题要求LI标函数最大化,可以通过使该LI标函数的负值最小化即-f(x)最小化来实现。近似地,对于quadprog函数提供-H 和-f,对于1 inprog函数提供-f。 2.约束非正 优化工具箱要求非线性不等式约束的形式为Ci(x)?0,通过对不等式取负可以达到使大于零的约束形式变为小于零的不等式约束形式的U的,如Ci (x)?0形式的约束等价于- Ci(x)?0;Ci(x)?b形式的约束等价于- Ci(x)+b?0。 3.避免使用全局变量 Fmincon是mat lab最主要内置的求解约束最优化的函数,该函数的优化问题的标准形式为:1.数学模型标准形式: min f , X, s. t. AX?b ,线性不等式约束, AeqX二beq ,线性等式约束, C(X)?0 ,非线性不等式约束条件,车灯线光源的优化设计(第二组)
基于MATLAB的生产过程中最大利润问题的优化设计
数学建模--路灯问题
matlab(四连杆优化设计)
车灯线光源的优化设计_2002年全国大学生数学建模A题论文
matlab与优化设计
数学模型——教室照明灯布置
转向梯形优化设计matlab程序
数学建模常见问题
(完整word版)优化设计Matlab编程作业
MATLAB第12章工程优化设计实例