第7章练习题

第7章设备管理
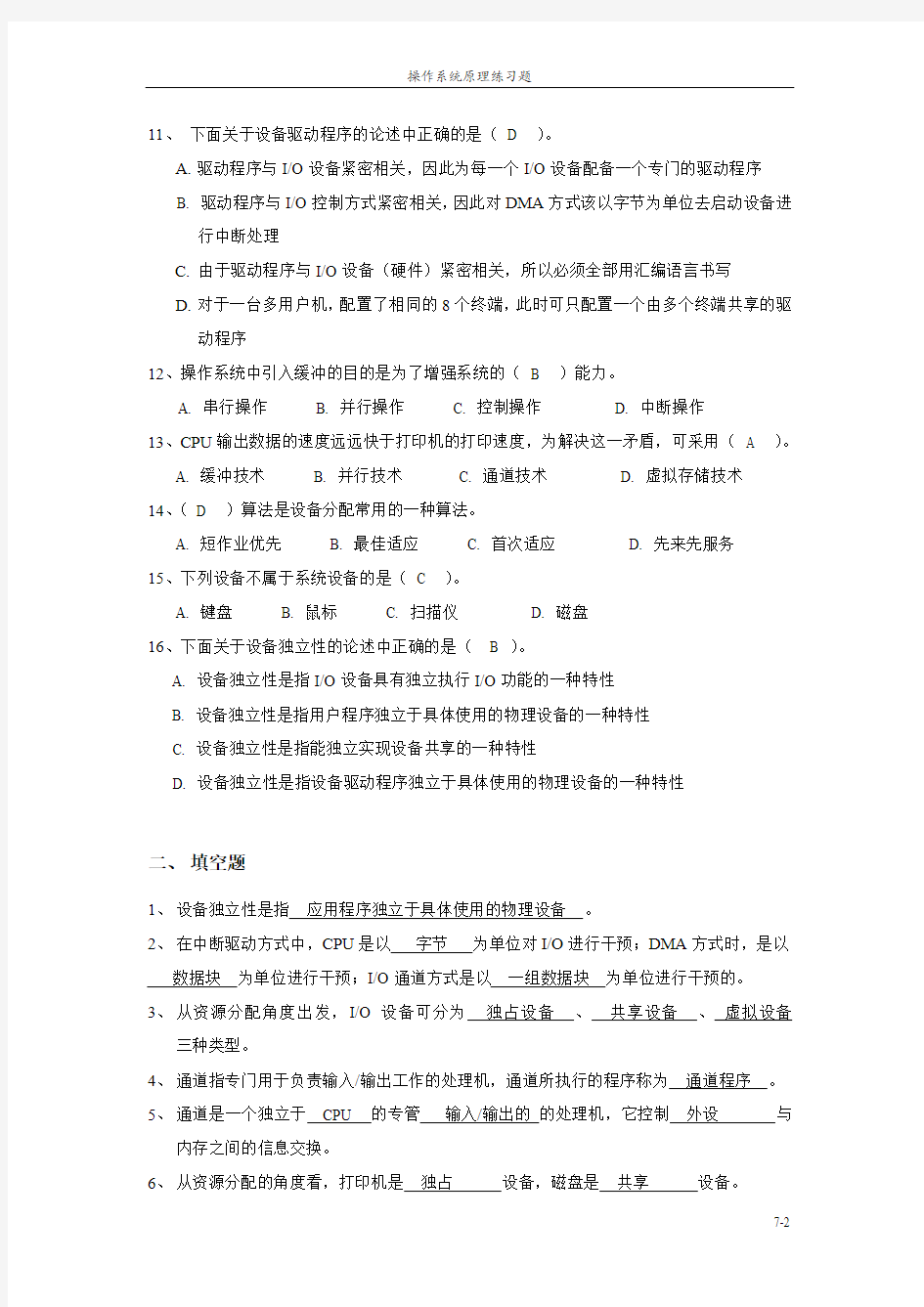
一、单选题
1、通过硬件和软件的功能扩充,把原来独占的设备改造成若干用户共享的设备,这种设备
称为( C )。
A. 存储设备
B. 系统设备
C. 虚拟设备
D. 用户设备
2、通道是一种(C )。
A. I/O端口
B. 共享文件
C. I/O专用处理器
D. 数据通道
3、(A )是操作系统中采用的以空间换时间的技术。
A. 缓冲技术
B. 并行技术
C. 通道技术
D. 虚拟存储技术
4、通道又称为I/O处理机,它用于实现(A )之间的信息传输。
A. 主存与外设
B. CPU与外设
C. 主存与外存
D. CPU与外存
5、对于磁盘来说,输入输出操作的信息传送单位是(D )。
A. 字节
B. 字
C. 文件
D. 块
6、在采用Spooling技术的系统中,用户的打印数据首先被送到(C )。
A. 打印机
B. 磁盘的输入井
C. 磁盘的输出井
D. 终端
7、设备管理程序对设备的管理是借助一些数据结构来进行的,下面的(B )不属于设备
管理的数据结构。
A. DCT
B. JCB
C. COCT
D. CHCT
8、缓冲技术中的缓冲池在(B )中。
A. 外存
B. 内存
C. ROM
D. 寄存器
9、如果I/O设备与存储设备进行数据交换不经过CPU来完成,这种数据交换方式是
( C )。
A. 中断方式
B. 无条件存取方式
C. DMA方式
D. 程序查询方式
10、在一般大型计算机系统中,主机对外围设备的控制可通过通道、设备控制器、设备三
个层次来实现,下面的叙述中正确的是(B )。
A.控制器可控制通道,设备在通道的控制下工作
B.通道控制控制器,设备在控制器控制下工作
C.通道和控制器分别控制设备
D.控制器控制通道和设备工作
11、下面关于设备驱动程序的论述中正确的是(D )。
A.驱动程序与I/O设备紧密相关,因此为每一个I/O设备配备一个专门的驱动程序
B. 驱动程序与I/O控制方式紧密相关,因此对DMA方式该以字节为单位去启动设备进
行中断处理
C.由于驱动程序与I/O设备(硬件)紧密相关,所以必须全部用汇编语言书写
D.对于一台多用户机,配置了相同的8个终端,此时可只配置一个由多个终端共享的驱
动程序
12、操作系统中引入缓冲的目的是为了增强系统的(B )能力。
A. 串行操作
B. 并行操作
C. 控制操作
D. 中断操作
13、CPU输出数据的速度远远快于打印机的打印速度,为解决这一矛盾,可采用(A )。
A. 缓冲技术
B. 并行技术
C. 通道技术
D. 虚拟存储技术
14、(D )算法是设备分配常用的一种算法。
A. 短作业优先
B. 最佳适应
C. 首次适应
D. 先来先服务
15、下列设备不属于系统设备的是(C )。
A. 键盘
B. 鼠标
C. 扫描仪
D. 磁盘
16、下面关于设备独立性的论述中正确的是( B )。
A. 设备独立性是指I/O设备具有独立执行I/O功能的一种特性
B. 设备独立性是指用户程序独立于具体使用的物理设备的一种特性
C. 设备独立性是指能独立实现设备共享的一种特性
D. 设备独立性是指设备驱动程序独立于具体使用的物理设备的一种特性
二、填空题
1、设备独立性是指应用程序独立于具体使用的物理设备。
2、在中断驱动方式中,CPU是以字节为单位对I/O进行干预;DMA方式时,是以
数据块为单位进行干预;I/O通道方式是以一组数据块为单位进行干预的。
3、从资源分配角度出发,I/O设备可分为独占设备、共享设备、虚拟设备
三种类型。
4、通道指专门用于负责输入/输出工作的处理机,通道所执行的程序称为通道程序。
5、通道是一个独立于CPU 的专管输入/输出的的处理机,它控制外设与
内存之间的信息交换。
6、从资源分配的角度看,打印机是独占设备,磁盘是共享设备。
7、在实现了设备独立性的系统中,I/O进程申请设备是以逻辑设备名来申请的。
8、设备分配算法有先来先服务和优先权高者优先两种。
9、I/O控制方式的发展经历了4个阶段,分别是程序查询方式、I/O中断方式、
DMA方式、I/O通道方式。
10、按设备所属关系分类,可分为系统设备和用户设备两类。
11、虚拟设备是通过虚拟技术把独占变成能为若干用户共享的设备。
12、根据信息交换方式,通道可分成 3 种类型,分别是字节多路通道、
数组选择通道和数组多路通道。
13、设备驱动程序是I/O进程和设备控制器之间的一个通信程序。
14、为了防止进程对系统资源的无序竞争, 所有设备必须由系统统一分配。
15、现代计算机I/O系统的结构,由输入/输出井、输入/输出缓冲区和输入/输出
进程三级组成。
三、简答题
1、什么是Spooling技术?Spooling系统由哪几个部分组成?
答:Spooling技术是一种虚拟设备技术,它可以把一台独占设备改造为虚拟设备,在进程所需的物理设备不存在或被占用的情况下,使用该设备。Spooling技术是对脱机输入、输出系统的模拟,所以又叫做假脱机操作。
Spooling系统主要由三部分组成:输入井和输出井、输入缓冲区和输出缓冲区、输入进程和输出进程。
2、设备分配策略与哪些因素有关?
3、缓冲池既可以作为输入缓冲又可以作为输出缓冲使用,供多个进程访问,所以缓冲池是
临界资源,为了能使诸进程能同步互斥地访问缓冲池,请给出相应的算法,要求用信号量实现。
4、设备控制器的主要功能有哪些?
5、什么是设备驱动程序?设备驱动程序的主要功能有哪些?
6、设备分配的算法有哪些?
7、简述独占设备的一般分配过程。
8、什么是虚拟设备?简述共享打印机的工作原理。
9、I/O控制方式有几种?各有什么特点?
第七章_零件图_习题答案
第七章 零件图
第一章 制图基本知识 第二章 正投影法基础 第三章 换面法 第四章 组合体 1. 组合体视图的画法 2. 平面与回转面的交线
3. 两回转面的交线
4. 组合体视图及其尺寸注法 5. 读组合体视图 第五章 轴测图 第六章 机件形状的基本表示 方法 1. 视图、剖视 2. 断面、简化画法 第七章 零件图 第八章 常用标准件和齿轮、 弹簧表示法 第九章 装配图
P 60
P 61
P 62
P 63
P 64
P 65
P 66
P 67
首 页
下一页
极限与配合、形状和位置公差
第一章 制图基本知识 第二章 正投影法基础 第三章 换面法 第四章 组合体 1. 组合体视图的画法 2. 平面与回转面的交线
3. 两回转面的交线
4. 组合体视图及其尺寸注法 5. 读组合体视图 第五章 轴测图 第六章 机件形状的基本表示 方法 1. 视图、剖视 2. 断面、简化画法 第七章 零件图 第八章 常用标准件和齿轮、 弹簧表示法 第九章 装配图
首 页
下页题
答 案
P60
极限与配合、形状和位置公差
第一章 制图基本知识 第二章 正投影法基础 第三章 换面法 第四章 组合体 1. 组合体视图的画法 2. 平面与回转面的交线
3. 两回转面的交线
4. 组合体视图及其尺寸注法 5. 读组合体视图 第五章 轴测图 第六章 机件形状的基本表示 方法 1. 视图、剖视 2. 断面、简化画法 第七章 零件图 第八章 常用标准件和齿轮、 弹簧表示法 第九章 装配图
首 页
题 目
下页题
返 回
P60
工程热力学课后作业答案(第七章)第五版
7-1当水的温度t=80℃,压力分别为0.01、0.05、0.1、0.5及1MPa 时,各处于什么状态并求出该状态下的焓值。 解:查表知道 t=80℃时饱和压力为0.047359MPa 。 因此在0.01、0.05、0.1、0.5及1MPa 时状态分别为过热、未饱和、未饱和,未饱和、未饱和。焓值分别为2649.3kJ/kg ,334.9 kJ/kg ,335 kJ/kg ,335.3 kJ/kg ,335.7 kJ/kg 。 7-2已知湿蒸汽的压力p=1MPa 干度x=0.9。试分别用水蒸气表和h-s 图求出h x ,v x ,u x ,s x 。 解:查表得:h``=2777kJ/kg h`=762.6 kJ/kg v``=0.1943m 3/kg v`=0.0011274 m 3/kg u``= h``-pv``=2582.7 kJ/kg u`=h`-pv`=761.47 kJ/kg s``=6.5847 kJ/(kg.K) s`=2.1382 kJ/(kg.K) h x =xh``+(1-x)h`=2575.6 kJ/kg v x =xv``+(1-x)v`=0.1749 m 3/kg u x =xu``+(1-x)u`=2400 kJ/kg s x =xs``+(1-x)s`=6.14 kJ/(kg.K) 7-3在V =60L 的容器中装有湿饱和蒸汽,经测定其温度t =210℃,干饱和蒸汽的含量m v =0.57kg ,试求此湿蒸汽的干度、比容及焓值。 解:t =210℃的饱和汽和饱和水的比容分别为: v``=0.10422m 3/kg v`=0.0011726 m 3/kg h``=2796.4kJ/kg h`=897.8 kJ/kg 湿饱和蒸汽的质量:x m m v = `)1(``v x xv m V -+= 解之得: x=0.53 比容:v x =xv``+(1-x)v`=0.0558 m 3/kg 焓:h x =xh``+(1-x)h`=1904kJ/kg 7-4将2kg 水盛于容积为0.2m 3的抽空了的密闭刚性容器中,然后加热至200℃试求容器中 (1)压力;(2)焓;(3)蒸汽的质量和体积。 解:(1)查200℃的饱和参数 h``=2791.4kJ/kg h`=852.4 kJ/kg v``=0.12714m 3/kg v`=0.0011565m 3/kg 饱和压力1.5551MPa 。 刚性容器中水的比容: 2 2.0=v =0.1 m 3/kg 第七章练习题 1. 单项选择 1-1 重要的轴类零件的毛坯通常应选择( ①铸件②锻件 ③棒料④管材 )。 1-2 普通机床床身的毛坯多采用( ①铸件②锻件③焊接件 )。④冲压件 1-3 基准重合原则是指使用被加工表面的()基准作为精基准。 ②设计②工序③测量④装配 1-4 箱体类零件常采用()作为统一精基准。 ①一面一孔②一面两孔③两面一孔④两面两孔 1-5 经济加工精度是在()条件下所能保证的加工精度和表面粗糙度。 ①最不利②最佳状态③最小成本④正常加工 1-6 铜合金7 级精度外圆表面加工通常采用()的加工路线。 ①粗车②粗车-半精车③粗车-半精车-精车④粗车-半精车-精磨1-7 淬火钢7 级精度外圆表面常采用的加工路线是()。 ①粗车—半精车—精车③粗车—半精车—粗磨②粗车—半精车—精车—金刚石车④粗车—半精车—粗磨—精磨 1-8 铸铁箱体上φ120H7孔常采用的加工路线是()。 ①粗镗—半精镗—精镗③粗镗—半精镗—粗磨②粗镗—半精镗—铰 ④粗镗—半精镗—粗磨—精磨 1-9 为改善材料切削性能而进行的热处理工序(如退火、正火等),通常安排在()进行。 ①切削加工之前②磨削加工之前③切削加工之后④粗加工后、精加工前 1-10 工序余量公差等于( )。 ①上道工序尺寸公差与本道工序尺寸公差之和 ②上道工序尺寸公差与本道工序尺寸公差之差 ③上道工序尺寸公差与本道工序尺寸公差之和的二分之一 ④上道工序尺寸公差与本道工序尺寸公差之差的二分之一 1-11 直线尺寸链采用极值算法时,其封闭环的下偏差等于( ①增环的上偏差之和减去减环的上偏差之和 )。 ②增环的上偏差之和减去减环的下偏差之和 ③增环的下偏差之和减去减环的上偏差之和 ④增环的下偏差之和减去减环的下偏差之和 1-12 ( 直线尺寸链采用概率算法时,若各组成环均接近正态分布,则封闭环的公差等于)。 ①各组成环中公差最大值 ③各组成环公差之和 ②各组成环中公差的最小值 ④各组成环公差平方和的平方根 1-13 用近似概率算法计算封闭环公差时,k值常取为( ①0.6~0.8 ②0.8~1 ③1~1.2 ④ 1.2~1.4 )。 1-14 派生式CAPP 系统以()为基础。 ①成组技术②数控技术③运筹学④网络技术 1-15 工艺路线优化问题实质上是()问题。 ①寻找最短路径 2. 多项选择 ②寻找最长路径③寻找关键路径④工序排序 2-1 选择粗基准最主要的原则是()。 ①保证相互位置关系原则 ④自为基准原则 ②保证加工余量均匀分配原则③基准重合原则 2-2 采用统一精基准原则的好处有()。 ①有利于保证被加工面的形状精度②有利于保证被加工面之间的位置精度 ③可以简化夹具设计与制造 2-3 平面加工方法有()等。 ④可以减小加工余量 ①车削②铣削③磨削④拉削 2-4 研磨加工可以()。 ①提高加工表面尺寸精度 ④提高加工表面的硬度 ②提高加工表面形状精度③降低加工表面粗糙度 2-5 安排加工顺序的原则有()和先粗后精。 ①先基准后其他②先主后次③先面后孔④先难后易 2-6 采用工序集中原则的优点是( ①易于保证加工面之间的位置精度 ③可以降低对工人技术水平的要求 )。 ②便于管理 ④可以减小工件装夹时间 2-7 最小余量包括( )和本工序安装误差。 第七章控制图95 第七章控制图 一.前言: 为使现场的质量状况达成目标,均须加以管理。我们所说的“管理”作业,一般均用侦测产品的质量特性来判断“管理”作业是否正常。而质量特性会随着时间产生显著高低的变化;那么到底高到何种程度或低至何种状态才算我们所说的异常?故设定一合理的高低界限,作为我们分析现场制程状况是否在“管理”状态,即为控制图的基本根源。 控制图是于1924年由美国品管大师修哈特(W.A.Shewhart)博士所发明。而主要定义即是[一种以实际产品质量特性与依过去经验所研判的过程能力的控制界限比较,而以时间顺序表示出来的图形]。 二.控制图的基本特性: 一般控制图纵轴均设定为产品的质量特性,而以过程变化的数据为刻度;横轴则为检测产品的群体代码或编号或年月日等,以时间别或制造先后别,依顺序点绘在图上。 在管制图上有三条笔直的横线,中间的一条为中心线(Central Line,CL),一般用蓝色的实线绘制;在上方的一条称为控制上限(Upper Control Limit,UCL);在下方的称为控制下限(Lower Control Limit,LCL)。对上、下控制界限的绘制,则一般均用红色的虚线表现,以表示可接受的变异范围;至于实际产品质量特性的点连线条则大都用黑色实线绘制。 控制状态: 96 品管七大手法 上控制界限(UCL) 中心线(CL) 下控制界限(LCL) 三.控制图的原理: 1.质量变异的形成原因: 一般在制造的过程中,无论是多么精密的设备、环境,它的质量特性一定都会有变动,绝对无法做出完全一样的产品;而引起变动的原因可分为两种:一种为偶然(机遇)原因;一种为异常(非机遇) 原因。 (1)偶然(机遇)原因(Chance causes): 不可避免的原因、非人为的原因、共同性原因、一般性原因,是属于控制状态的变异。 (2)异常(非机遇) 原因(Assignable causes): 可避免的原因、人为的原因、特殊性原因、局部性原因等,不可让其存在,必须追查原因,采取必要的行动,使过程恢复正常控制状态,否则会造成很大的损失。 第七章 控制图 97 2.控制界限的构成: (偶然原因的变动) (异常原因的变动) 本章重点介绍机械零件的尺寸精度、表面粗糙度、形位公差、材料和热处理等技术要求的确定方法,结合典型零件介绍零件图的内容和视图表达特点等。在学习本章的过程中,要结合所学内容,紧密联系生产实际,要学会查阅有关的技术标准,并能在零件图样上正确标注尺寸公差、粗糙度等技术要求。 第一讲零件图内容和表达方法 1.知识要点 (1)零件图的内容 (2)视图选择原则 (3)典型零件的表达方法及尺寸标注 (4)零件的工艺结构 2.教学方法 轴类零件和盘零件的测绘已经在上一章中作了介绍,本章重点介绍支架、箱体类零件的表达方法和尺寸标注,在讲解典型零件的表达方法和尺寸标注时要结合作业绘制的模型研究,利用课件和模型先让同学自己分析表达方法,然后结合同学的答案进行分析。 3.课前准备 准备轴、支架、轮盘、相体类零件各一个,准备好作业测绘的轮盘类模型和图纸,作业模型要和齿轮拉开距离。 4.教学内容 7.1 零件图内容和表达方法 7.1.1 零件图的内容 零件图是设计部门提交给生产部门的重要技术文件,它不仅反映了设计者的设计意图,而且表达了零件的各种技术要求,如尺寸精度、表面粗糙度等,工艺部门要根据零件图制造毛坯、制订工艺规程、设计工艺装备等。所以,零件图是制造和检验零件的重要依据。 【案例1】电机支架图7-1是数控切割机上的一个支架类零件,图7-2是支架的零件图,将零件图和前面介绍的组合体、机件的视图比较,增加了以下内容。 图7-1 电机支架【虚拟现实/07-01 电机支架.wrl】 图7-2 电机支架 (1)一组视图在零件图中须用一组视图来表达零件的形状和结构,应根据零件的结构特 点,选择适当的剖视、断面、局部放大等表达方法,用简明的方法将零件的形状、结构表达清楚。 (2)完整的尺寸零件图上的尺寸不仅要标注完整、清晰,而且要注得合理,能够满足设 计意图,宜于制造生产,便于检验。 (3)技术要求零件图上的技术要求包括表面粗糙度、尺寸偏差、表面形状和位置公差、 表面处理、热处理、检验等要求。 (4)标题栏对于标题栏的格式,GB/T10609-1989已作了统一规定,应尽可能采用标准 的标题栏格式。填写标题栏时应注意以下几点: 零件名称:零件名称要精练,如“齿轮”、“泵盖”等,不必体现零件在机器中的具体作用; 图样编号:图样可按产品系列进行编号,也可按零件类型综合编号。各行业、厂家都规定了自己的编号方法,图样编号要有利于图纸检索; 零件材料:零件材料要用规定的代号表示,不得用自编的文字和代号表示。 7.1.2 典型零件的表达方法 【案例2】轴套类零件 如图7-3所示,轴类零件主要在车床或磨床上加工,所以主视图的轴线应水平放置。这类零件一般不画视图为圆的侧视图,而是围绕主视图根据需要画一些局部视图、断面机械设计制造基础 第七章 练习题与答案
控制图的基本特性与原理
第七章 零件图