学习活动之拆检转速传感器与凸轮轴位置传感器

学习活动之拆检转速/凸轮轴传感器
学习目标
1.能找出并能拆检转速/凸轮轴传感器。
2.能叙述的转速/凸轮轴传感器结构和工作原理。
3.能绘制转速/凸轮轴传感器电控系统原理图并能叙述控制原理。
4.能检测和分析转速/凸轮轴传感器的性能。
5.能拆绘转速/凸轮轴传感器的控制原理图并在车上检测分析。
建议学时:8学时
学习地点:实训室
一、学习准备
汽车维修手册、万用表、诊断仪、诊断仪使用说明书、互联网资源、车辆、发动机试验台架、各种转速和凸轮轴传感器、发动机电脑ECU和多媒体设备。
学习过程
1、认知并拆装转速/凸轮轴位置传感器
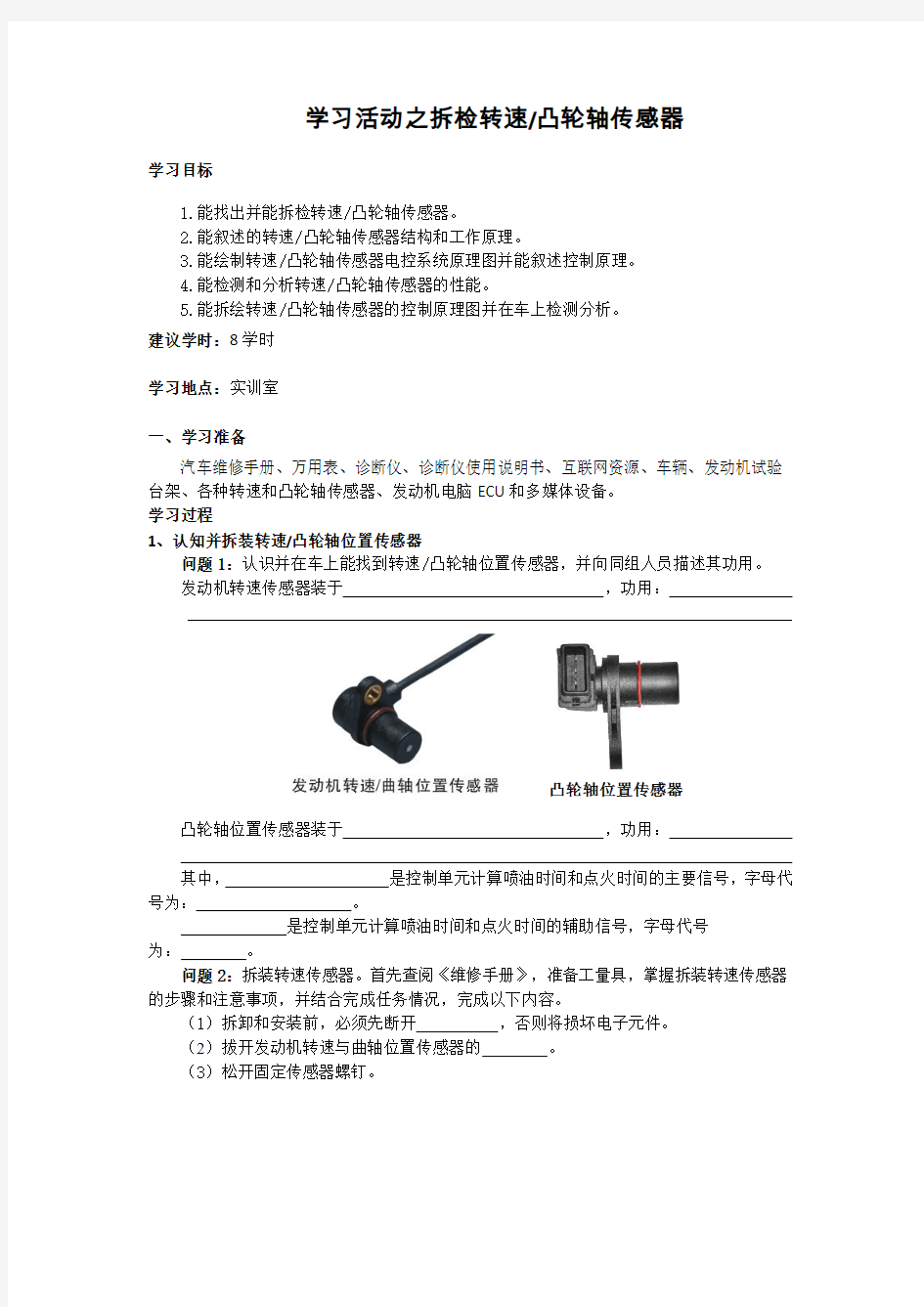
问题1:认识并在车上能找到转速/凸轮轴位置传感器,并向同组人员描述其功用。
发动机转速传感器装于,功用:
凸轮轴位置传感器装于,功用:
其中,是控制单元计算喷油时间和点火时间的主要信号,字母代号为:。
是控制单元计算喷油时间和点火时间的辅助信号,字母代号
为:。
问题2:拆装转速传感器。首先查阅《维修手册》,准备工量具,掌握拆装转速传感器的步骤和注意事项,并结合完成任务情况,完成以下内容。
(1)拆卸和安装前,必须先断开,否则将损坏电子元件。
(2)拔开发动机转速与曲轴位置传感器的。
(3)松开固定传感器螺钉。
(4)取出传感器并进行检查。
通过拆卸你掌握了那些技巧和感受,可相互交流:
问题3:查阅《维修手册》及其他资料,检查并确定实训车辆曲轴转速/位置传感器传感器的类型,补齐以下框图内容。
2、磁感应式发动机转速与曲轴位置传感器
1.电磁感应原理
做一试验并记录下结果:
在一个空心纸筒上绕上一组和电流计联接的导体线圈,观察当磁棒插进线圈和抽出的过程中,电流计的指针变化:插入时,抽出时。磁棒插进或抽出线圈的速度越快,电流计。当磁棒不动时,电流计。
结论:对于线圈来说,运动的磁棒意味着它周围的磁场发生了变化,从而使线圈感生出电流即:变化的磁产生。
问题4:磁的常识。
(1)这一现象是谁发现的:
①法拉第②牛顿③爱迪生④赫兹
(2)中国是世界上最早发现磁现象的国家是:。
①中国②印度③英国④德国
(3)指南针是我国的哪个朝代发明的?。
①战国②西周③西汉④东周
(4)磁铁吸引铁、钴、镍等物质的性质称为磁性。磁铁两端磁性强的区域称为磁极,一端为北极(又叫 N □ S□极),一端为南极(又叫 N □ S□极)。同性磁极相互,异性磁极相互。
(5)磁场:
(6)磁通量:
Φ=BS中Φ—,B—,S—。
(7)电磁感应现象亦称电磁感应定律:电路中感应电动势的大小,与穿过这一电路的磁通量的变化率成正比,即:E=nΔΦ/Δt {即法拉第电磁感应定律}E: (V),n:,ΔΦ/Δt: }Δ为
变化量,单位Wb ,Δt为发生变化所用,单位为s.
可以得出:变化磁通量中的导体,会产生电动势,如导体形成是闭合回路,便产生感应电流;变化越快,则电流越。
(8)举例说明你在生活中遇到电磁感应的例子
。
2.磁感应式发动机转速与曲轴位置传感器
问题5:概述:磁感应式发动机转速与曲轴位置传感器(或称发动机转速传感器),它主要由、和等组成。安装于飞轮处的磁感应式传感器,利用飞轮的齿圈和飞轮上的正时记号来触发感应电压信号。
磁感应式传感器的工作原理:当发动机转动时,飞轮的齿圈和飞轮上的正时记号使传感器内的磁路空气隙变化,磁力线穿过的路径为永久磁铁N极一定子与转子间的气隙一转子凸齿一转子凸齿与定子磁头间的气隙一磁头一导磁板一永久磁铁S极。当信号盘旋转时,磁路中的气隙就会周期性地发生变化,磁路的磁阻和穿过信号线圈磁头的磁通量随之发生周期性变化。根据电磁感应原理,线圈中磁通量发生变化,传感线圈中就会感应产生交变电动势。向ECU输入相应的电压信号。
查阅并描述曲轴转速/位置传感器传感器的结构、工作原理并完成以下任务。
(1)补齐下面结构图:
发动机转速与曲轴位置传感器
(2)工作原理:
3.霍尔效应式凸轮轴/曲轴位置传感器
资料:霍尔传感器是根据霍尔效应制作的一种磁场传感器。霍尔效应是磁电效应的一种,这一现象是霍尔(A.H.Hall ,1855—1938)于1879年在研究金属的导电机构时发现的。后来发现半导体、导电流体等也有这种效应,而半导体的霍尔效应比金属强得多。
根据霍尔效应,人们用半导体材料制成的元件叫霍尔元件。霍尔效应是研究半导体材料性能的基本方法。通过霍尔效应实验测定的霍尔系数,能够判断半导体材料的导电类型、载流子浓度及载流子迁移率等重要参数。
它具有对磁场敏感、结构简单、体积小、频率响应宽、输出电压稳定,使用寿命长等优点,因此,广泛地应用于工业自动化技术、检测技术及信息处理等方面。在测量、自动化、计算机和信息技术等领域得到广泛的应用。
问题10:在展板上绘制霍尔元件半霍尔效应原理图,
并写出霍尔电压U H 的计算公式并加以解释。
导体薄片两端通以控制电流I ,并在薄片的垂直方向施加磁感应强度为B 的均匀磁场,则在垂直于电流和磁场的方向上,将产生电势差为U H 的霍尔电压。
霍尔效应在汽车上有哪些应用? 。 何种型号的车辆应用较多? 。
霍尔电压信号与磁感应信号哪一个更稳定? 问题11:霍尔效应凸轮轴/曲轴位置传感器。
霍尔效应凸轮轴/曲轴位置传感器,它主要由、、和等组成。安装于,与曲轴一起旋转。
问题12:查阅并描述霍尔效应式凸轮轴/曲轴位置传感器的结构、工作原理并完成以下任务,补齐下面结构图。
总结:
工作原理:
。
讨论:ECU如何能检测到上止点前的某一时刻的?
。
二、计划与实施
一、曲轴位置传感器的检测
二、凸轮轴位置传感器
三、分析与评价
小组评价
组长签字/日期
3、教师评价
教师总体评价:
教师签名:年月日
凸轮轴位置传感器的工作原理
凸轮轴位置传感器 1、功用与类型 曲轴位置传感器(Crankshaft Position Sensor,CPS)又称为发动机转速与曲轴转角传感器,其功用是采集曲轴转动角度和发动机转速信号,并输入电子控制单元(ECu),以便确定点火时刻和喷油时刻。 凸轮轴位置传感器(Camshaft Position Sensor,CPS)又称为气缸识别传感器(Cylinder Identification Sensor,CIS),为了区别于曲轴位置传感器(CPS),凸轮轴位置传感器一般都用CIS表示。凸轮轴位置传感器的功用是采集配气凸轮轴的位置信号,并输入ECU,以便ECU 识别气缸1压缩上止点,从而进行顺序喷油控制、点火时刻控制和爆燃控制。此外,凸轮轴位置信号还用于发动机起动时识别出第一次点火时刻。因为凸轮轴位置传感器能够识别哪一个气缸活塞即将到达上止点,所以称为气缸识别传感器。 2.光电式曲轴与凸轮轴位置传感器 (1)结构特点 日产公司生产的光电式曲轴与凸轮轴位置传感器是由分电器改进而成的,主要由信号盘(即信号转子)、信号发
生器、配电器、传感器壳体和线束插头等组成。 信号盘是传感器的信号转子,压装在传感器轴上,如图2-22所示。在靠近信号盘的边缘位置制作有均匀间隔弧度的内、外两圈透光孔。其中,外圈制作有360个透光孔(缝隙),间隔弧度为1。(透光孔占0.5。,遮光孔占0.5。),用于产生曲轴转角与转速信号;内圈制作有6个透光孔(长方形孑L),间隔弧度为60。,用于产生各个气缸的上止点信号,其中有一个长方形的宽边稍长,用于产生气缸1的上止点信号。 信号发生器固定在传感器壳体上,它由Ne信号(转速与转角信号)发生器、G信号(上止点信号)发生器以及信号处理电路组成。Ne信号与G信号发生器均由一个发光二极管(LED)和一个光敏晶体管(或光敏二极管)组成,两个LED 分别正对着两个光敏晶体管。 (2)工作原理 光电式传感器的工作原理如图2-22所示。信号盘安装在发光二极管(LED)与光敏晶体管(或光敏二极管)之间。当信号盘上的透光孔旋转到LED与光敏晶体管之间时,LED 发出的光线就会照射到光敏晶体管上,此时光敏晶体管导通,其集电极输出低电平(0.1~O.3V);当信号盘上的遮光部分旋转到LED与光敏晶体管之间时,LED发出的光线就不能照射到光敏晶体管上,此时光敏晶体管截止,
传感器与检测技术课后答案
第一章课后习题答案 1.什么是传感器?它由哪几个部分组成?分别起到什么作用? 解:传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的、便于应用的某种物理量的测量装置,能完成检测任务;传感器由敏感元件,转换元件,转换电路组成。敏感元件是直接感受被测量,并输出与被测量成确定关系的物理量;转换元件把敏感元件的输出作为它的输入,转换成电路参量;上述电路参数接入基本转换电路,便可转换成电量输出。2.传感器技术的发展动向表现在哪几个方面? 解:(1)开发新的敏感、传感材料:在发现力、热、光、磁、气体等物理量都会使半导体硅材料的性能改变,从而制成力敏、热敏、光敏、磁敏和气敏等敏感元件后,寻找发现具有新原理、新效应的敏感元件和传感元件。 (2)开发研制新型传感器及组成新型测试系统 ①MEMS技术要求研制微型传感器。如用于微型侦察机的CCD传感器、用于管道爬壁机器人的力敏、视觉传感器。 ②研制仿生传感器 ③研制海洋探测用传感器 ④研制成分分析用传感器 ⑤研制微弱信号检测传感器 (3)研究新一代的智能化传感器及测试系统:如电子血压计,智能水、电、煤气、热量表。它们的特点是传感器与微型计算机有机结合,构成智能传感器。系统功能最大程度地用软件实现。 (4)传感器发展集成化:固体功能材料的进一步开发和集成技术的不断发展,为传感器集成化开辟了广阔的前景。 (5)多功能与多参数传感器的研究:如同时检测压力、温度和液位的传感器已逐步走向市场。 3.传感器的性能参数反映了传感器的什么关系?静态参数有哪些?各种参数代表什么意义?动态参数有那些?应如何选择? 解:在生产过程和科学实验中,要对各种各样的参数进行检测和控制,就要求传感器能感受被测非电量的变化并将其不失真地变换成相应的电量,这取决于传感器的基本特性,即输出—输入特性。衡量静态特性的重要指标是线性度、灵敏度,迟滞和重复性等。 1)传感器的线性度是指传感器的输出与输入之间数量关系的线性程度; 2)传感器的灵敏度S是指传感器的输出量增量Δy与引起输出量增量Δy的输入量增量Δx 的比值; 3)传感器的迟滞是指传感器在正(输入量增大)反(输入量减小)行程期间其输出-输入特性曲线不重合的现象;
节气门位置传感器构造原理与检测
节气门位置传感器构造原理与检测 节气门由驾驶员通过加速踏板来操纵,以改变发动机的进气量,从而控制发动机的运转。不同的节气门开度标志着发动机的不同运转工况。为了使喷油量满足不同工况的要求,电子控制汽油喷射系统在节气门体上装有节气门位置传感器。它可以将节气门的开度转换成电信号输送给ECU,作为ECU判定发动机运转工况的依据。节气门位置传感器有开关量输出型和线性可变电阻输出型两种。 1、开关量输出型节气门位置传感器的检测 (1)结构和电路 开关量输出型节气门位置传感器又称为节气门开关。它有两副触点,分别为怠速触点(IDL)和全负荷触点(PSW)。如图1所示,由一个和节气门同轴的凸轮控制两开关触点的开启和闭合。当节气门处于全关闭的位置时,怠速触点IDL 闭合,ECU根据怠速开关的闭合信号判定发动机处于怠速工况,从而按怠速工况的要求控制喷油量;当节气门打开时,怠速触点打开,ECU根据这一信号进行从怠速到小负荷的过渡工况的喷油控制;全负荷触点在节气门由全闭位置到中小开度围一直处于开启状态,当节气门打开至一定角度(丰田1G-EU车为55°)的位置时,全负荷触点开始闭合,向ECU送出发动机处于全负荷运转工况的信号,ECU 根据此信号进行全负荷加浓控制。丰田1G-EU发动机电子控制系统用的开关量输出型节气门位置传感器,它与ECU的连接线路如图2所示。
(2)开关量输出型节气门位置传感器的检查调整(丰田1S-E和2S-E)①就车检查端子间的导通性
点火开关置于“OFF”位置,拔下节气门位置传感器连接器,在节气门限位螺钉和限位杆之间插入适当厚度的厚薄规;如图3所示,用万用表Ω档在节气门位置传感器连接器上测量怠速触点和全负荷触点的导通情况。 当节气门全闭时,怠速触点IDL应导通;当节气门全开或接近全开时,全负荷触点PSW应导通;在其他开度下,两触点均应不导通。具体情况如表1所示。否则,应调整或更换节气门位置传感器。 表1端子间导通性检查要求(丰田1S-E和2S-E) 限位螺钉和 限位杆之间 的间隙 端子 IDL-E(TL)PSW-E(TL)IDL-PSW 0.5mm导通不导通不导通
曲轴位置传感器的检测及故障案例.
曲轴位置传感器的检测 曲轴位置传感器是发动机电子控制系统中最主要的传感器之一,它提供点火时刻(点火提前角)、确认曲轴位置的信号,用于检测活塞上止点、曲轴转角及发动机转速。曲轴位置传感器所采用的结构随车型不同而不同,可分为磁脉冲式、光电式和霍尔式三大类。它通常安装在曲轴前端、凸轮轴前端、飞轮上或分电器内。 一、磁脉冲式曲轴位置传感器的检测 1、磁脉冲式曲轴位置传感器的结构和工作原理 (1)日产公司磁脉冲式曲轴位置传感器 该曲轴位置传感器安装在曲轴前端的皮带轮之后,如图1所示。 在皮带轮后端设置一个带有细齿的薄圆齿盘(用以产生信号,称为信号盘),它和曲轴皮带轮一起装在曲轴上,随曲轴一起旋转。在信号盘的外缘,沿着圆周每隔4°有个齿。共有90个齿,并且每隔120°布置1个凸缘,共3个。安装在信号盘边沿的传感器盒是产生电信号信号发生器。信号发生器内有3个在永久磁铁上绕有感应线圈的磁头,其中磁头②产生120°信号,磁头①和磁头③共同产生曲轴1°转角信号。磁头②对着信号盘的120°凸缘,磁头①和磁头③对着信号盘的齿圈,彼此相隔了曲轴转角安装。信号发生器内有信号放大和整形电路,外部有四孔连接器,孔“1”为120°信号输出线,孔“2”为信号放大与整形电路的电源线,孔“3”为1°信号输出线,孔“4”为接地线。通过该连接器将曲轴位置传感器中产生的信号输送到ECU。
发动机转动时,信号盘的齿和凸缘引起通过感应线圈的磁场发生变化,从而在感应线圈里产生交变的电动势,经滤波整形后,即变成脉冲信号(如图2所示)。 发动机旋转一圈,磁头②上产生3个120°脉冲信号,磁头①和③各产生90个脉冲信号(交替产生)。由于磁头①和磁头③相隔3°曲轴转角安装,而它们又都是每隔4°产生一个脉冲信号,所以磁头①和磁头③所产生的脉冲信号相位差正好为90°。将这两个脉冲信号送入信号放大与整形电路中合成后,即产生曲轴1°转角的信号(如图 3所示)。 产生120°信号的磁头②安装在上止点前70°的位置(图4)
传感器及检测技术教案
传感器及检测技术
项目一 传感器误差与特性分析 任务1 检测结果的数据整理 1.1.1 测量与测量方法 1.检测 2.测量方法 (1)电测法和非电测法 (2)直接测量和间接测量 (3)静态测量和动态测量 (4)接触性测量和非接触性测量 (5)模拟式测量和数字式测量 1.1.2 测量误差及其表示方法 测量误差:测量值与其真值之间的差值 例:某温度计的量程范围为0-500oC ,校验时该表的最大绝对误差为6oC ,试确定其精度等级? 查表1.1,精度等级应定为1.5级 任务1: 现有0.5级的0~300oC 和1.0级0~100oC 的两个温度计,欲测量80oC 的温度,试问选用哪一个温度计好?为什么?在选用仪器时应考虑哪些方面? 实施: 0.5级的0~300oC 的温度计测量时可能出现的最大绝对误差为: 用其测量80oC 可能出现的最大示值相对误差为: ?? ? ? ? ???? ?引用误差示值(标称)相对误差实际相对误差相对误差绝对误差x γγ%.21%100500 6 %100=?= ??= m m m A x γ5 .1)0300(%5.0111=-?==?m m m A x γ
1.0级的0~100oC 的温度计测量时可能出现的最大绝对误差为: 用其测量80oC 可能出现的最大示值相对误差为: 结论:选用1.0级的0~100oC 的温度计较好。选用仪器时,不能单纯追求精度,而是要兼顾精度和量程 1.1.3 测量误差的分类及来源 1.系统误差 2.随机误差 3.粗大误差(疏忽误差、过失误差) 4.缓变误差 任务2 传感器特性分析与传感器选用 1.2.1 传感器的组成及其分类 1.2.2 传感器的静态特性与指标 传感器的静态特性指标 1.精密度、准确度和精确度 2.稳定性 1 )0100(%.01222=-?==?m m m A x γ%25.1%10080 1 %10022=?= ??= x x m x γ?? ?动态特性 静态特性
传感器应用电路设计.
传感器应用电路设计 电子温度计 学校:贵州航天职业技术学院 班级:2011级应用电子技术 指导老师: 姓名: 组员:
摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 本文将介绍一种基于单片机控制的数字温度计。在件方面介绍单片机温度控制系统的设计,对硬件原理图做简洁的描述。系统程序主要包括主程序、读出温度子程序、温度转换命令子程序、计算温度子程序、显示数据刷新子程序。软硬件分别调试完成以后,将程序下载入单片机中,电路板接上电源,电源指示灯亮,按下开关按钮,数码管显示当前温度。由于采用了智能温度传感器DS18B20,所以本文所介绍的数字温度计与传统的温度计相比它的转换速率极快,进行读、写操作非常简便。它具有数字化输出,可测量远距离的点温度。系统具有微型化、微功耗、测量精度高、功能强大等特点,加之DS18B20内部的差错检验,所以它的抗干扰能力强,性能可靠,结构简单。 随着科技的不断发展,现代社会对各种信息参数的准确度和精确度的要求都有了几何级的增长,而如何准确而又迅速的获得这些参数就需要受制于现代信息基础的发展水平。在三大信息信息采集(即传感器技术)、信息传输(通信技术)和信息处理(计算机技术)中,传感器属于信息技术的前沿尖端产品,尤其是温度传感器技术,在我国各领域已经引用的非常广泛,可以说是渗透到社会的每一个领域,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量,因此研究温度的测量方法和装置具有重要的意义。 测量温度的关键是温度传感器,温度传感器的发展经历了三个发展阶段:①传统的分立式温度传感器②模拟集成温度传感器③智能集成温度传感器。 目前的智能温度传感器(亦称数字温度传器)是在20世纪90年代中期问世的,它是微电子技术、计算机技术和自动测试技术(ATE)的结晶,特点是能输出温度数据及相关的温度控制量,适配各种微控制器(MCU)。社会的发展使人们对
凸轮轴位置传感器
篇一:《浅谈凸轮轴位置传感器的故障诊断与排除》 浅谈凸轮轴位置传感器的故障诊断与排除 摘要凸轮轴位置传感器是发动机的组成部分,凸轮轴位置传感器损坏而导致发动机工作不正常,是常见故障之一。本人根据在维修捷达车型的过程中的实践和体会,淡谈如何快捷地判断出故障的原因,以便日后操作效率更高,这对于其它车型也有一定的参考意义。 关键词凸轮轴位置传感器故障发动机动力下降 一.引言 汽车电子控制燃油喷射发动机是机电一体化的高新技术产物,它通过各种类型和用途的传感器﹑执行器及电子控制元件来自动控制发动机的正常工作。但无论是单点喷射式或是多点喷射式的发动机,凸轮轴位置传感器,是发动机电子控制系统最主要的传感器之一,其功用是检查活塞上止点,向电脑提供确认活塞位置的信号,以此来决定发动机的点火时刻和顺序喷油,发动机缺少或收不到其发出的正确位置信号,将出现启动困难,加速无力,排放超标,怠速不稳。造成这些现象的原因有时会使故障诊断变得界限模糊。要准确迅速诊断其故障,就要求
我们正确认识它的特性,了解它的结构,工作原理及其诊断方法。 二. 发动机的故障现象 一辆捷达GT轿车,其故障表现为有时加速无力,排放超标,怠速不稳。在高转速时发动机就开始抖动,特别是在颠簸或震动的路面情况下抖动严重,有熄火的倾向。根据以上的故障现象,初步怀疑是凸轮轴位置传感器或线路连接的故障。 三.工作原理及检测方法 对凸轮轴位置传感器,生产厂商不同,其产品工艺结构也不尽相同,目前主要有三大类型霍尔式凸轮轴位置传感器,电磁式凸轮轴位置传感器及光电式凸轮轴位置传感器。本车捷达GT型轿车采用的霍尔式凸轮轴位置传感器安装在发动机进气凸轮的一端,如图1所示。 霍尔式凸轮轴位置传感器是依据霍尔效应的原理制成的。当一个霍尔元件置于磁场中同时一个电流流过该霍尔元件,电流方向垂直于磁场方向时,该霍尔元件在与电流 方向及磁场方向垂直的横向侧边上就会产生一个微量电压,这个电压称 篇二:《凸轮轴位置传感器工作原理》
传感器及检测技术
习题一概论p16 1.测试系统一般是怎样构成的? ①传感器将被测物理量转换成以电量为主要形式的电信号; ②信号变换部分是对传感器所送出的信号进行加工; ③显示与记录部分将所测信号变为一种能为人们所理解的形式,以供人们观测和分析。 2.什么是测量误差?测量误差有几种表示方法? 测量误差:人们在进行各种实际测量时,尽管被测量在理论上存在真值,但由于客观实验条件的限制,被测量的真值实际上是测不到的,因而测量结果只能是真值的近似值,这就不可避免地存在着测量误差。 测量误差有:绝对误差、相对误差、引用误差。 3.测量误差按出现规律可分为几种?它们与准确度与精密度有什么关系? ①按出现规律可分为:系统误差、随机误差、粗大误差 ②准确度表示测量结果中系统误差的大小。系统误差越小,准确度越高,即真一民实际 值符合的程度越高。 精密度表示测量结果中随机误差大小的程度。随机误差越小,测量值越集中,表示精密度越高。 精确度是测量结果系统误差与随机误差的综合。表示测量结果与真值的一致程度。精确度用来反映系统误差和随机误差的综合影响。精确度越高,表示正确度和精密度越高,意味着系统误差和随机误差都小。 4.产生系统误差的常见原因有哪些?常用的减小系统误差的方法有哪些? ①产生系统误差的主要原因: ●仪器的制造、安装或使用方法不正确; ●环境因素影响(温度、湿度、电源等); ●测量原理中使用近似计算公式;
●测量人员不良读数习惯 ②减小系统误差的方法: ●发现判断:实验对比、残余误差观察、准则检测 ●减少消除:修正、特殊测量法(替代、差值、误差补偿、对称观察) 5.传感器有哪些几部分组成? 敏感元件、转换元件、转换电路 6.按传感器的工作机理、能量转换方式、输入量及测量原理四种方法,传感器分别是如何分 类的? ①按工作机理分: ●电参数式传感器(如电阻式、电感式和电容式); ●压电式传感器; ●光电式传感器; ●热电式传感器。 ②按能量转换方式分: ●能量控制型传感器(如电阻、电感、电容式) ●能量转换型传感器(如基于压电效应、热电效应传感器) ③按输入量分: 力传感器、位移传感器、温度传感器 ④按测量原理分: ●电路参量式传感器(包括电阻式、电感式、电容式) ●电动势式传感器(包括磁电感应式、霍尔式、压电式) ●光电式传感器(包括一般光电式、光栅式、激光式、光电码盘式、光导纤维式) ●半导体式传感器 习题二温度检测p35 7.温度检测主要有哪几种方法及它们是怎样分类的? 温度检测方法分为:接触测量法,非接触测量法。 接触式包括:热膨胀式(如水银、双金属、液体或气体压力); 热电偶; 热电阻(铂电阻、铜电阻、半导体热敏电阻)。
电子节气门位置传感器和节气门直到的检测
六、节气门直动式节气门位置传感器 a) 实物图 b) 结构示意图 图2-13节气门直动式怠速控制系统 怠速节气门位置传感器 2-应急弹簧 3-怠速电机 4-节气门位置传感器 5-怠速 稳定装置 6-怠速开关 以上几种节气门体都安装有怠速旁通气道,从而实现怠速控制,而节气门直动式怠速控制系统取消了旁通通道,而是通过控制节气门的开启角度,调节空气通道的截面来控制进气量,实现对怠速的控制,这种控制广泛的应用在大众车系。1.系统的组成和工作原理 图2-14节气门体电路图 RP1节气门位置传感器 RP2怠速节气门位置传感器 S 怠速开关 M怠速直流电 动机 节气门直动式怠速控制系统主要由节气门位置传感器、怠速节气门位置传感器,怠速开关和执行器(怠速直流电动机)以及一套齿轮驱动机构组成(见图2-13),图2-14为其内部线路图。节气门位置传感器和怠速节气门位置传感器都是由一个双轨形碳膜电阻和在其上滑动的触点组成。另外在节气门体上有一个双齿轮,它是由同轴的一个大齿轮和一个小齿轮组成。与怠速直流电动机同轴的小齿轮与双齿轮中的大齿轮啮合,扇行齿轮与节气门同轴并与双齿轮中的大齿轮啮合。当驾驶员踩加速踏板时,怠速开关断开,发动机ECU根据节气门位置传感器的输入信号判断发动机的运行工况,并进行喷油和点火的控制。当驾驶员不踩加速踏板时,节气门在回位弹簧的作用下关闭,怠速开关闭合。发动机ECU收到
怠速开关闭合的信号,得知发动机处于怠速运行状态,并根据怠速节气门位置传感器的信号和曲轴位置传感器的信号来控制直流电动机的动作,经过小齿轮、双齿轮和扇形齿轮將电动机的转速传递到节气门,使其打开相应的角度,使怠速转速达到最佳值。
传感器与检测技术总结材料
《传感器与检测技术》总结 :王婷婷 学号:14032329 班级:14-11
传感器与检测技术 这学期通过学习《传感器与检测技术》,懂得了很多,以下是我对这本书的总结。 第一章 概 述 传感器的作用是:传感器是各种信息的感知、采集、转换、传输和处理的功能器件,具有不可替代的重要作用。 传感器的定义:能够感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置。 传感器的组成:被测量量---敏感元件---转换元件----基本转换电路----电量输出 传感器的分类:按被测量对象分类(部系统状态的部信息传感器{位置、速度、力、力矩、温度、导演变化}、外部环境状态的外部信息传感器{接触式[触觉、滑动觉、压觉]、非接触式[视觉、超声测距、激光测距);按工作机理分类(结构型{电容式、电感式}、物性型{霍尔式、压电式});按是否有能量转换分类(能量控制型[有源型]、能量转换型[无源型]);按输出信号的性质分类(开关型[二值型]{接触型[微动、行程、接触开关]、非接触式[光电、接近开关]}、模拟型{电阻型[电位器、电阻应变片],电压、电流型[热电偶、光电电池],电感、电容型[电感、电容式位置传感器]}、数字型{计数型[脉冲或方波信号+计数器]、代码型 [回转编码器、磁尺]})。 传感器的特性主要是指输出与输入之间的关系。当输入量为常量,或变化极慢时,称为静态特性;输出量对于随时间变化的输入量的响应特性,这一关系称为动态特性,这一特性取决于传感器本身及输入信号的形式。可以分为接触式环节(以刚性接触形式传递信息)、模拟环节(多数是非刚性传递信息)、数字环节。动态测量输入信号的形式通常采用正弦周期(在频域)信号和阶跃信号(在时域)。 传感器的静态特性:线性度(以一定的拟合直线作基准与校准曲线比较% 100max ??=Y L L δ)、迟滞、重复性、灵敏度(K0=△Y/△X=输出变化量/输入变化量 =k1k2···kn )和灵敏度误差(rs=△K0/K0×100%、稳定性、静态测量不确定性、其他性能参数:温度稳定性、抗干扰稳定性。 传感器的动态特性:传递函数、频率特性(幅频特性、相频特性)、过渡函数。 0阶系统:静态灵敏度;一阶系统:静态灵敏度,时间常数;二阶系统:静态灵敏度,时间常数,阻尼比。 传感器的标定:通过各种试验建立传感器的输入量与输出量之间的关系,确定传感器在不同使用条件下的误差关系。国家标准测力机允许误差±0.001%,省、部一级计量站允许误差±0.01%,市、企业计量站允许误差±0.1%,三等标准测力机、传感器允许误差±(0.3~0.5)%,工程测试、试验装置、测试用力传感器允许误差±1%。分为静态标定和动态标定。 第二章 位 移 检 测 传 感 器 测量位移常用的传感器有电阻式、电容式、涡流式、压电式、感应同步器式、磁栅式、光电式。参量位移传感器是将被测物理量转化为电参数,即电阻、电容或电感等。发电型位移传感器是将被测物理量转换为电源性参量,如电动势、电荷等。属于能量转换型传感器,这类传感器有磁电型、压电型等。 电位计的电阻元件通常有线绕电阻、薄膜电阻、导塑料(即有机实心电位计)等。电位计结构简单,输出信号大,性能稳定,并容易实现任意函数关系。其缺点是要求输入能量大,电刷与电阻元件之间有干摩擦,容易磨损,产生噪声干扰。 线性电位计的空载特性:x K x l R R R x == ,KR----电位计的电阻灵敏度(Ω/m )。电
传感器原理及工程应用设计
传感器原理及工程应用设计
传感器原理及工程应用设计(论文) 压电传感器在动平衡测量系统中的设计与应用 学生姓名:李梦娇 学号:20094073231 所在学院:信息技术学院 专业:电气工程及其自动化(2)班 中国·大庆 2011年12月
摘要 传感器是动平衡测量系统中的重要元件之一, 是一种将不平衡量产生的振动信号不失真地转变成电信号的装置。利用压电式力传感器作为动平衡测量系统中的敏感元件来测量不平衡质量引起的振动。重点阐述了该压电式力传感器的结构设计、安装位置设计及振动信号检测中的关键问题。同时, 详细分析了该传感器的信号调理电路特点。现场实验结果表明, 设计的压电式力传感器在动平衡测量中的性能良好。动平衡处理是旋转部件必须采取的工艺措施之一, 以单片机为核心的动平衡测量系统将逐步取代常规动平衡仪。 关键词:动平衡振动信号压电式力传感器调理电路测量系统单片机
ABSTRACT As one of the important elements in the dynamic balancing measurement system, transducer is the device that converts the vibration signal caused by the mi balance into electrical signal without distortion. The piezoelectric pressure transducer is app lied to dynamic balancing measurement system formeasuring the vibration caused by mi balanced mass. The structure design and the installation location of the piezoelectric force transducer and the critical issues in vibration signal detection are expounded. The characteristics of the signal conditioning circuit of this transducer are analyzed in detail. The experimental results show that the performance of the piezoelectric pressure transducer offers excellent performance in dynamic balancing measurement. The dynamic equilibration measurement is one of the main technological steps to betaken for all the swiveling part s. T he conventional dynamic equilibration measurement system is being replaced by a new o ne based on a monolithic computer. Keyword:dynamic balance vibration signal Piezoelectric force transducer Conditioning circuit Measurement system Monolithic computer
传感器与检测技术考题及答案
传感器与检测技术考试试题 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。(2分) 2.霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍尔电势大小。 4.热电偶所产生的热电势是两种导体的接触电势和单一导体的温差电势组成的,其表达式为Eab (T ,To )=T B A T T B A 0d )(N N ln )T T (e k 0σ-σ?+-。在热电偶温度补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方,以减小冷端温度变化的影响。 5.压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。(2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量(①增加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(① 变面积型 ② 变极距型 ③ 变介电常数型)外是线性的。(2分) 1、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积 增大时,铁心上线圈的电感量(①增大,②减小,③不变)。 2、在平行极板电容传感器的输入被测量与输出电容值之间的关 系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。 3、在变压器式传感器中,原方和副方互感M 的大小与原方线圈 的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。 4、传感器是能感受规定的被测量并按照一定规律转换成可用输
凸轮轴位置传感器 实训
实训项目凸轮轴位置传感器的检测 一、目的和要求 1、了解凸轮轴位置传感器的外观,结构与工作原理。 2、了解凸轮轴位置传感器故障,对整个电控系统的影响。 3、掌握凸轮轴位置传感器的检测方法(电阻测试、电压测试、波形测试、数据流测试)根据工艺流程技术规范术测试。 4.掌握凸轮轴位置传感器数据分析的方法。 二、实训课时 实训共安排 1.0 课时,其中辅导教师讲解 0.5 课时,学生实训、实验、填写检测报告 0.5课时。《实训报告》作为考评时的主要依据,分数记入个人实训总成绩。三、实训器材 1.工具:数字万用表,汽车示波器,一字或十字螺丝刀,12V/5V变压器。 2.设备:桑塔纳动机故障实验台,KT600故障诊断仪。四、原理与应用 霍尔效应是指将一个通有电流 I 的长方形白金导体垂直于磁线放入磁感应强度为B的磁场中,就会产生一个电流方向和磁场方向的电压,当取消磁场时电压立即消失。产生的电压后来被称之为霍尔电压 UH,UH 与通过白金导体的电流 I 和磁感应强度B成正比。利用霍尔效应制成的元件称为霍尔元件,利用霍尔元件制成的传感器称为霍尔效应式传感器,简称霍尔传感器。
凸轮轴位置传感器(Crankshaft Position Sensor,CPS)又称为判缸传感器,为了区别于曲轴位置传感器CPS,凸轮轴位置传感器一般使用缩写CIS来表示,在形式上分为光电式、磁感应式和霍尔式三种。凸轮轴位置传感器的功用是采集配气机构凸轮轴的位置信号并输入电控单元,以便电控单元识别一缸压缩上止点位置,从而精确计算顺序喷油控制、点火正时控制和燃烧爆震控制。此外,凸轮轴位置信号还用于发动机刚起动时识别出第一次点火时刻。 本次实验使采用的是桑塔纳3000型轿车使用的霍耳式凸轮轴位置传感器(CIS)图3,在大众车系的电路原理图上标注为G40元件,其接线插座上有三个引线端子,端子“1”为传感器电源正极端子,与电控单元“62”端子连接;端子“2”为传感器信号输出端子,与电控单元“76”端子连接,端子“3”为传感器电源负极端子,与电控单元“67”端子连接,连接电路如图所示。 凸轮轴位置传感器安装在发动机气门室盖靠近传动带的一端,其结构如图4所示,主要由霍耳式传感器 2 和信号转子 5 组成。信号转子又称为触发叶轮,安装在凸轮轴上,用定位螺栓和座圈定位固定。信号转子的隔板又称为叶片,在隔板上制有一个缺口,缺口对应产生的信号为低电平信号,隔板(叶片)对应产生的信号为高电平信号。 当霍耳传感器信号中断时,电控单元ECU能够检测
《传感器与检测技术》试题及答案(已做)
《传感器与检测技术》试题 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。(2分) 2.霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍尔电势大小。 4.热电偶所产生的热电势是两种导体的接触电势和单一导体的温差电势组成的,其表达式为Eab (T ,To )=T B A T T B A 0d )(N N ln )T T (e k 0σ-σ?+-。在热电偶温度补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方,以减小冷端温度变化的影响。 5.压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。(2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量(①增加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(① 变面积型 ② 变极距型 ③ 变介电常数型)外是线性的。(2分) 1、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积 增大时,铁心上线圈的电感量(①增大,②减小,③不变)。 2、在平行极板电容传感器的输入被测量与输出电容值之间的关 系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。 3、在变压器式传感器中,原方和副方互感M 的大小与原方线圈 的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。 4、传感器是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,传感器通常由直接响应于被测量的敏感元件
光电传感器电路
光电传感器电路设计 1、设计要求 利用光电传感器(光电对管)将机械旋转转化为电脉冲,光电对管实物如图1所示。 图1 光电对管实物图 2、电路设计 电路原理图如图2所示。 图2 光电传感器电路原理图 电路由四部分组成。 光电对管U1、电阻R1、电阻R2构成发射接收电路;比较器U2A、电阻R3、电阻R4、电阻R5、电阻R6构成反相输入的滞回比较器;比较器U2B、电阻R7、电阻R8构成反相器;发光二极管D1、电阻R9构成输出电路。 3、电路测试 测试电路如图3所示。 由变频器带动电机工作,将光电对管对准旋转的电机(电机上贴有反光带),处理电路由12V直流电源供电。
图3 测试电路 测试波形如图4所示(测试距离为4cm)。 (a)发射接收电路的输出信号(b)滞回比较器比较电压波形 (c)滞回比较器输出波形(d)反相器输出波形 图4 测试波形 4、PCB板绘制(板子大小限定为62mm*18mm) PCB图如图5所示。其中电阻采用0805封装,LM358采用DIP8封装。
图5 光电传感器电路PCB图 5、完成实物图 实物图如图6所示。 (a)未焊接的PCB板 (b)焊接好的PCB板 (c)板子的外加塑料壳 图6 实物图 6、小结 在本次电路设计中,主要的难点有两个。 一是参数的整定,主要是滞回比较器上下门限的选择。滞回比较器上下门限的选择跟发射接收电路的输出波形有关,而光电对管与旋转面的距离、旋转面的反光度、反光带所在位置、可能遇到的干扰等都会影响输出波形。 二是PCB板的绘制。本次绘制采用的是Altium Designer Summer 09软件(Protel99SE的升级版)。首先画好原理图,然后再导入到PCB中,没有的元件
凸轮轴位置传感器
实训项目:凸轮轴位置传感器。 准备工具/设备:万用表,试灯,示波器。 实训目的:掌握其检测要领和步骤。 实训重点:认知凸轮轴位置传感器的作用、安装位置。 实训难点:凸轮轴位置传感器检测数值。 实训流程: 1 凸轮轴位置感器的作用:具有检测凸轮位置,ECU精确控制各缸喷油和点火时刻及凸轮轴可变正时的控制。 2 安装位置:一般情况下安装在气缸盖的后端。 3 类型:凸轮轴位置传感器同样也是有磁脉冲形式和霍尔形式。磁脉冲式有 2线、3线制,霍尔式有3线、4线制。 4磁脉冲2线为交变电压输出信号线,电压为4伏左右(怠速工况),转速越高电压越高。3线制其中一根作为屏蔽线,防止外界干扰信号的传送。 5 霍尔式3线制,一根是5伏或12伏电压,一根是信号输出线到ECU,一根是进入ECU搭铁线。4制线的增加了一根屏蔽线,防止外界干扰信号的传输。 6 磁脉冲形式的可用万用表检测其阻值,冷态835—1400欧姆,热态1060—1645欧姆。同样也可用万用表检测其输出电压,转速越高电压越高。否则更换凸轮轴位置传感器,或者检查ECU到传感器之间的线路有无短路和断路或与车身搭铁。有条件的可用示波器检测传感器输出的正弦波波形是否正常与符合规律。 7 霍尔式凸轮轴位置传感器可用万用表或试灯检查电源线是否有电压或点亮试灯,信号线到ECU是否通路,是否与其他线路短路。搭铁线与车身阻值是否正常。也可用示波器检测信号输出矩形波形是否正常有规律。 8 检测线路与线路之间是否短路,电源、信号线路是否与车身搭铁。 注意事项:检测过程中防止线路相互短路。 现场安全应急预案: 为了确保教学实训中的人员与财产的安全,为了避免不必要的人身和财物的损害,遵循“安全第一,预防为主”的方针,高度重视实训室安全工作,增强安全防范意识。特规定教学实训室安全防护措施与与应急方案。 1 现场准备在有效期内的消防灭火器,懂初起火灾的扑救知识与应用。 2 现场备有医疗救护用品与药品。 3 待发动机温度降至或接近环境温度时方可操作。
(完整版)传感器与检测技术试卷及答案
1.属于传感器动态特性指标的是(D ) A 重复性 B 线性度 C 灵敏度 D 固有频率 2 误差分类,下列不属于的是(B ) A 系统误差 B 绝对误差 C 随机误差D粗大误差 3、非线性度是表示校准(B )的程度。 A、接近真值 B、偏离拟合直线 C、正反行程不重合 D、重复性 4、传感器的组成成分中,直接感受被侧物理量的是(B ) A、转换元件 B、敏感元件 C、转换电路 D、放大电路 5、传感器的灵敏度高,表示该传感器(C) A 工作频率宽 B 线性范围宽 C 单位输入量引起的输出量大 D 允许输入量大 6 下列不属于按传感器的工作原理进行分类的传感器是(B) A 应变式传感器 B 化学型传感器 C 压电式传感器D热电式传感器 7 传感器主要完成两个方面的功能:检测和(D) A 测量B感知 C 信号调节 D 转换 8 回程误差表明的是在(C)期间输出输入特性曲线不重合的程度 A 多次测量 B 同次测量 C 正反行程 D 不同测量 9、仪表的精度等级是用仪表的(C)来表示的。 A 相对误差 B 绝对误差 C 引用误差 D粗大误差 二、判断 1.在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在改变条件时,按一定规律变化的误差称为系统误差。(√) 2 系统误差可消除,那么随机误差也可消除。(×) 3 对于具体的测量,精密度高的准确度不一定高,准确度高的精密度不一定高,所以精确度高的准确度不一定高(×) 4 平均值就是真值。(×) 5 在n次等精度测量中,算术平均值的标准差为单次测量的1/n。(×) 6.线性度就是非线性误差.(×) 7.传感器由被测量,敏感元件,转换元件,信号调理转换电路,输出电源组成.(√) 8.传感器的被测量一定就是非电量(×) 9.测量不确定度是随机误差与系统误差的综合。(√) 10传感器(或测试仪表)在第一次使用前和长时间使用后需要进行标定工作,是为了确定传感器静态特性指标和动态特性参数(√) 二、简答题:(50分) 1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特性就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性? 答:传感器的动态特性是指当输入量随时间变化时传感器的输入—输出特性。静态特性是指当输入量为常量或变化极慢时传感器输入—输出特性。在时域条件下只研究静态特性就能够满足通常的需要,而在频域条件下一般要研究传感器的动态特性。 2、绘图并说明在使用传感器进行测量时,相对真值、测量值、测量误差、传感器输入、输出特性的概念以及它们之间的关系。 答:框图如下: 测量值是通过直接或间接通过仪表测量出来的数值。 测量误差是指测量结果的测量值与被测量的真实值之间的差值。 当测量误差很小时,可以忽略,此时测量值可称为相对真值。
《传感器与检测技术》试题及答案
《传感器与检测技术》试题 (2分) 2. 霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍 尔电势大小。 3、 光电传感器的理论基础是光电效应。通常把光线照射到物体表面后产生的光 电效应分为三类。第一类是利用在光线作用下光电 ______ 应,这类元件有光电管、光电倍增管;第二类是利用在光线作用下使材料内部电 阻率改变的内光电 效应,这类元件有光敏电阻;第三类是利用在光线作用下使 _ 物体内部产生一定方向电动势的光生伏特效应,这类元件有光电池、光电仪表。 4. 热电偶所产生的热电势是两种导体的接触电势和单一导体的温差电势组成 的,其表达式为 Eab (T ,To ) =-(T T o )ln’ T o ( A B M T 。在热电偶温度 e N B 补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长 — 线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方, 以减小冷端温度变化的影响。 L 压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产 生机械压力,从而 引起极化现象,这种现象称为正压电效应。相反,某些铁磁 物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。 (2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量( ①增 加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来 表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(① 极距型 ③ 变介电常数型)外是线性的。(2分) 1、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积增大时,铁 心上线圈的电感量(①增大,②减小,③不变)。 2、在平行极板电容传感器的输入被测量与输出电容值之间的关系中, 变面积型,②变极距型,③变介电常数型)是线性的关系。 3、在变压器式传感器中,原方和副方互感 M 的大小与原方线圈的匝数成(① 正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、 温度稳 定性、各种抗干扰稳定性等。 变面积型②变 (①
传感器原理及应用
《传感器原理及应用》讨论课报告书 电感式传感器的基本原理及典型应用 学院:机械工程学院 班级:13-1机械电子工程(卓越) 组员:李响夏中岩张轩赫 贡献率:李响资料查询,整理40% 夏中岩资料整理,编辑30% 张轩赫PPT设计编写30% 指导教师:边辉 完成日期:2016.05
目录 摘要............................................................................................................................... - 2 - 1 物料分拣系统简述................................................................................................... - 3 - 2 物料分拣系统中的传感器....................................................................................... - 3 - 2.1 电机起停控制传感器.................................................................................... - 3 - 2.1.1 漫反射光电接近开关......................................................................... - 3 - 2.1.2 电容式接近开关................................................................................. - 4 - 2.1.3 霍尔接近开关..................................................................................... - 4 - 2.1.4 电感式接近开关................................................................................. - 4 - 2.1.5传感器应用比较.................................................................................. - 4 - 2.2 物料计数用传感器........................................................................................ - 5 - 2.2.1 对射型红外光电开关......................................................................... - 5 - 2.2.2 电涡流式传感器................................................................................. - 5 - 2.2.3 霍尔传感器......................................................................................... - 6 - 2.3 测速及定位传感器........................................................................................ - 6 - 2.3.1 光电耦合器,码盘............................................................................. - 7 - 2.3.2 增量编码器......................................................................................... - 7 - 2.3.3 传感器功能对比................................................................................. - 7 - 2.4 物料分类传感器............................................................................................ - 7 - 2.4.1色标传感器.......................................................................................... - 8 - 2.5 固态继电器.................................................................................................... - 8 - 3 传感器前景展望....................................................................................................... - 9 - 3.1 传感器在科技发展中的重要性.................................................................... - 9 - 3.2 先进传感器的发展趋势................................................................................ - 9 - 4 反思与收获............................................................................................................... - 9 -参考文献..................................................................................................................... - 10 -