稳定裕度
标准大气
标准大气?气体状态方程?压强?完全气体?可压缩流体?不可压缩流体?声速?马赫数?临界马赫数?理想流体?黏性流体?黏性系数?雷诺数?普朗特 数?努塞特数?施特鲁哈尔数?弗劳德数?流场?流线?流管?流谱?迹线?旋涡?有旋流?无旋流?等熵流动?定常流?非定常流?亚声速流?跨声速流?超声速流?马赫波?马赫角?马赫锥?膨胀波?压缩波?激波?层流?湍流?转捩?其他科技名词?分离[流] ?尾流?边界层?边界层位移厚度?边界层动量厚度?激波-边界层干扰?高超声速流?高超声速激波层?气动加热?伯努利方程?逆压梯度?顺压梯度?气动噪声?声爆?空气动力学?理论空气动力学?稀薄气体力学?磁流体动力学?声障?热障?自由流?源?汇?偶极子?旋涡破碎?环 量?流函数?速度势?静压?动压?总压?静温?总温?驻点?拉瓦尔管?普朗特-迈耶流?锥形流?纳维-斯托克斯方程?连续方程?动量方程?能量方程?雷诺方程?欧拉方程?全速势方程?速度边界层?热边界层?间歇因子?边界层积分关系式?小扰动方程?扰动速度势?细长体理论?汤姆孙定理?库塔-茹科夫斯基定理?达朗贝尔佯谬?毕奥-萨伐尔公式?布拉休斯定理?库塔-茹科夫斯基条件?欧拉观点?拉格朗日观点?激波极曲线?苹果曲线?速度图法?布拉休斯平板解?曼格勒变换?波尔豪森法?镜像法?相似律?格特尔特法则?普朗特-格劳特法则?卡门-钱公式?升力线理论?自由涡?附着涡?马蹄涡?升力面理论?涡面?尾随涡?脱体涡?翼尖涡?螺旋桨滑流?薄翼理论?实验空气动力 学?量纲分析?Π-定理?相似准则?风洞?低速风洞?跨声速风洞?超声速风 洞?高超声速风洞?二维风洞?尾旋风洞?变密度风洞?低温风洞?水洞?稳定段?收缩段?喷管段?实验段?驻室?通气壁?开闭比?自适应壁?扩压段?第二喉道?风洞能量比?流场品质?湍流度?流向探头?湍流球?热线风速仪?皮托管?皮托静压管?测压排管?风洞天平?激光多普勒测速仪?流态显示?蒸气屏法?气泡流动显示?油流法?阴影法?纹影法?干涉图法?片光流态显示?粒子图像测速?风洞实验?半模实验?标模实验?旋翼塔实验?地面效应实验?风洞自由飞实验?浮力修正?洞壁干扰?阻塞效应?壁压信息法?支架干扰修 正?尺度效应?人工转捩?计算空气动力学?守恒型方程?非守恒型方程?有限基本解法?面元法?涡格法?特征线法?激波捕捉算法?人工黏性?气动力布局?翼身融合?翼型?翼弦?翼型中弧线?弯度?厚度分布?前缘半径?后缘 角?层流翼型?尖峰翼型?超临界翼型?菱形翼型?双圆弧翼型?自然层流翼型?无限翼展机翼?有限翼展机翼?机翼面积?根弦?梢弦?展弦比?梢根 比?等百分线?平均空气动力弦?平均几何弦?机翼扭转?几何扭转?气动扭转?锥形扭转?前缘下垂?气动补偿?机身长细比?机身最大横截面积?船尾角?迎角?升力?升力曲线?零升力角?最大升力系数?升力线斜率?失速迎 角?失速偏离?机翼滚摆?阻力?极曲线?摩擦阻力?型阻?底阻?浸润面 积?波阻?干扰阻力?阻力发散?诱导阻力?前缘吸力?升致阻力?面积律?升阻比?侧力?侧滑角?俯仰力矩?零升力矩?上仰?压力中心?气动力中心?偏航力矩?滚转力矩?铰链力矩?气动导数?静导数?操纵导数?铰链力矩导
系统稳定裕度研究性报告
自动控制原理研究性报告 一、报告题目 1、开环频率特性的极坐标图和Bode 图有什么联系和区别? 2、在计算系统的幅值裕量和相频余量方面有什么不同吗? 3、在进行系统校正时用哪一个更方便? 二、开环频率特性的极坐标图和Bode 图的联系和区别 当ω在0~∞变化时,向量G(j ω)的幅值和相角随ω而变化,与此对应的向量G(j ω) 的端点在复平面 G(j ω)上的运动轨迹就称为幅相频率特性或 Nyqusit 曲线。画有 Nyqusit 曲线的坐标图称为极坐标图或Nyqusit 图。 惯性环节:G(s)=1/(Ts+1)的Nyqusit 图 将系统频率特性G(j ω) 的幅值和相角分别绘在半对数坐标图上,分别得到对数幅频特 ()2 222T 1T j T 11T j 11j G ωωωωω+-+=+= ()arctan G j T ωω∠=-
性曲线(纵轴:对幅值取分贝数后进行线性分度20lg|G(j )|;横轴:对频率取以10为底的对数后进行分度lg ω)和相频特性曲线(纵轴:对相角进行线性分度;横轴:对频率取以10为底的对数后进行分度lg ω ),合称为伯德图(Bode 图)。 对数幅频特性记为 单位为分贝(dB) 对数相频特性记为 单位为度或弧度(rad) 从极坐标图与伯德图的源头来看,都是由开环传递函数得来。 其中极坐标图通过对传递函数进行分母有理化,将函数分为虚部和实部,由极坐标图的名称可知,极坐标图的坐标轴是极坐标系,通过运算,我们可以得到传递函数的模与角度,这些同样十分清楚的反映在极坐标图上。 而伯德图是由对数幅频曲线和相频特性曲线一同构成,两者缺一不可,两张图都是建立在半对数坐标系上,对数幅频曲线的纵轴以幅值取分贝数后进行线性分度,相频特性曲线以相角进行线性分度,而两张图的横轴都以频率取以10为底的对数后进行分度。 对两张图进行比较,可以发现极坐标图的信息比伯德图上多,首先,极坐标图将幅频与
稳定裕度
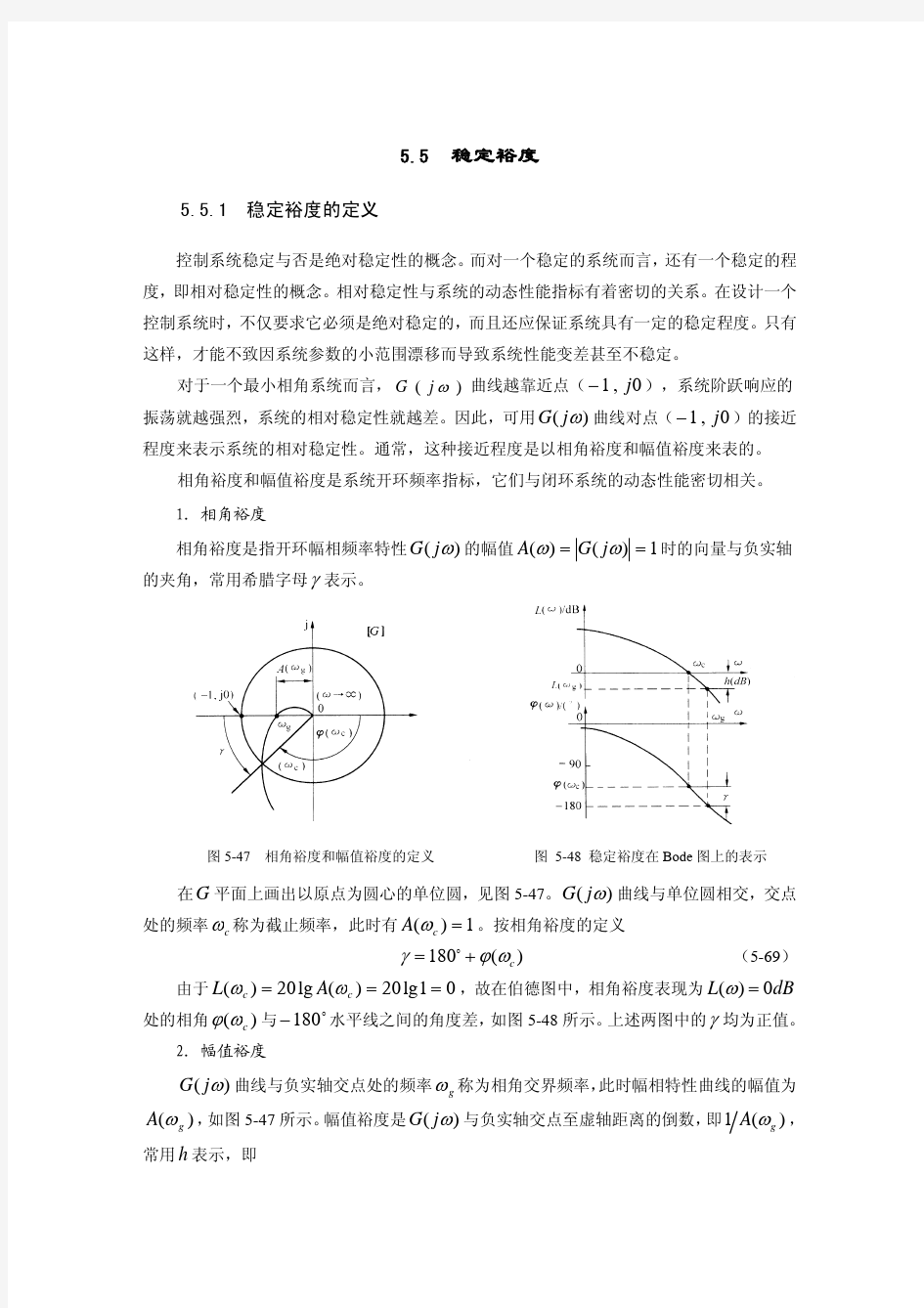
5.5 稳定裕度 5.5.1 稳定裕度的定义 控制系统稳定与否是绝对稳定性的概念。而对一个稳定的系统而言,还有一个稳定的程度,即相对稳定性的概念。相对稳定性与系统的动态性能指标有着密切的关系。在设计一个控制系统时,不仅要求它必须是绝对稳定的,而且还应保证系统具有一定的稳定程度。只有这样,才能不致因系统参数变化而导致系统性能变差甚至不稳定。 对于一个最小相角系统而言,()G j ω曲线越靠近(1,0j -)点,系统阶跃响应的振荡就越强烈,系统的相对稳定性就越差。因此,可用)(ωj G 曲线对(0,1j -)点的接近程度来表示系统的相对稳定性。通常,这种接近程度是以相角裕度和幅值裕度来表示的。 相角裕度和幅值裕度是系统开环频率指标,它与闭环系统的动态性能密切相关。 1 相角裕度 相角裕度是指幅相频率特性)(ωj G 的幅值1)()(==ωωj G A 时的向量与负实轴的夹角,常用希腊字母γ表示。 图5-46 相角裕度和幅值裕度的定义 图5-47稳定裕度在Bode 图上的表示 在G 平面上画出以原点为圆心的单位圆,见图5-46。)(ωj G 曲线与单位圆相交,交点处的频率c ω称为截止频率,此时有1)(=c A ω。按相角裕度的定义 ) (180 )180()(c c ω?ω?γ+=--= (5-59) 由于01lg 20)(lg 20)(===c c A L ωω,故在伯德图中,相角余度表现为 dB L 0)(=ω处的相角)(c ω?与 180-水平线之间的角度差,如图5-46所示。上述 两图中的γ均为正值。
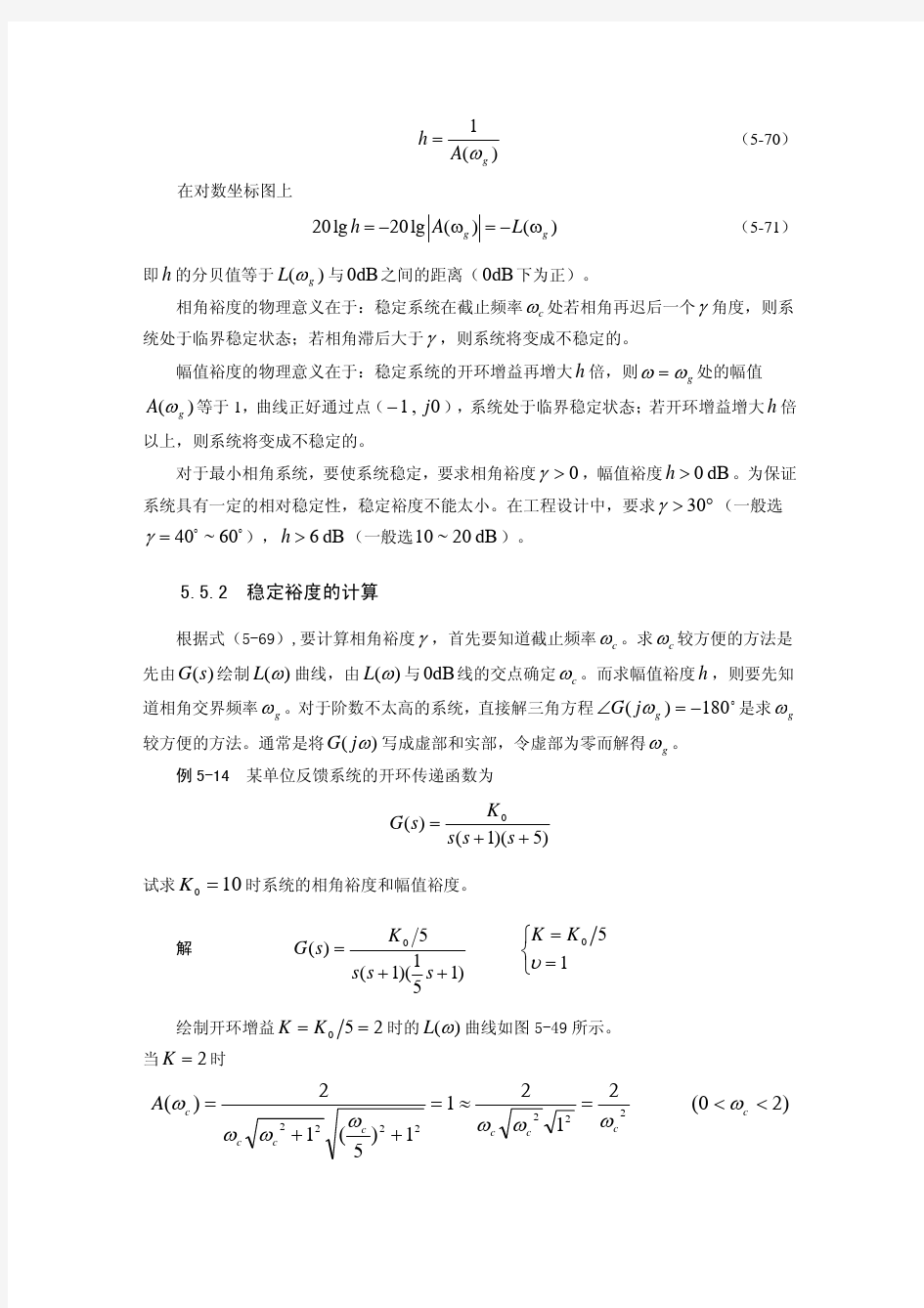
2 幅值裕度 ) (ωj G 曲线与负实轴交点处的频率g ω称为相角交界频率,此时幅相特性曲 线的幅值为)(g A ω,如图5-45所示。幅值裕度是指(0,1j -)点的幅值1与)(g A ω之比,常用h 表示,即 ) (1g A h ω= (5-60) 在对数坐标图上 20lg 20lg ()()g g h A L ωω=-=- (5-61) 即h 的分贝值等于)(g L ω与dB 0之间的距离(dB 0下为正)。 相角裕度的物理意义在于:稳定系统在截止频率c ω处若相角再迟后一个γ角度,则系统处于临界状态;若相角迟后大于γ,系统将变成不稳定。 幅值裕度的物理意义在于:稳定系统的开环增益再增大h 倍,则g ωω=处的幅值)(g A ω等于1,曲线正好通过(0,1j -)点,系统处于临界稳定状态;若开环增益增大h 倍以上,系统将变成不稳定。 对于最小相角系统,要使系统稳定,要求相角裕度0>γ,幅值裕度1>h 。为保证系统具有一定的相对稳定性,稳定裕度不能太小。在工程设计中,一般取 60~30=γ,2≥h 对应20lg 6h dB ≥。 5.5.2 稳定裕度的计算 根据式(5-59),要计算相角裕度γ,首先要知道截止频率c ω。求c ω较方便的方法是先由)(s G 绘制)(ωL 曲线,由)(ωL 与dB 0线的交点确定c ω。而求幅值裕度h 首先要知道相角交界频率g ω,对于阶数不太高的系统,直接解三角方程 180)(-=∠g j G ω是求g ω较方便的方法。 通常是将)(ωj G 写成虚部和实部,令虚部为零而解得g ω。 例5-12 某单位反馈系统的开环传递函数为 ) 5)(1()(0 ++= s s s K s G 试求100=K 时系统的相角裕度和幅值裕度。 解 ?? ?==++= 1 5 ) 151)( 1(5)(00υK K s s s K s G 绘制开环增益250==K K 时的)(ωL 曲线如图5-48所示。 当2=K 时
6第六节稳定裕量
第六节稳定裕量
前面我们用奈奎斯特曲线判断系统的绝对稳定性,即系统是稳定还是不稳定。当然一个系统只有稳定才是有用的。 但除此之外还有两个问题需要考虑。首先,由于赖以分析和设计的系统数学模型不可能十分精确,尽管对模型的分析结果是稳定的,而实际系统却可能并不稳定;其次,一个稳定的系统还必须有良好的过渡响应。 从这两方面考虑,则要求系统不仅是稳定的,还应具有一定的安全系数。换句话讲,就是不仅关心系统是否稳定,还关心系统稳定的程度,这就是所谓的相对稳定性。相对稳定性也称为稳定裕量。 本节将用频率响应方法来研究系统的相对稳定性。
用频率响应方法来研究系统的相对稳定性是利用开环频率特性的极坐标图与(-1,j0)点的接近程度来反映闭环系统稳定或不稳定的程度。 -1 Re Im G(s)平面K 3K 2 K 1 ωc1 ωc3 ωc2=ωg2 ωg1 ωg3 当K =K 3时,极坐标图顺时针包围了(-1,j0)点,因 此,闭环系统不稳定。当K 减小到K 2时,极坐标图将通过(-1,j0)点,闭环系统处于临界稳定,此时闭环系统在虚轴上有极点。当K 小于临界值后,系统变成稳定系统,而且,随着K 的进一步减小,系统的相对稳定性将越来越高。
-10 (ω→0) j (ω→∞)ωc ωg A (ωg ) ?(ωc ) γ G (s )平面 最小相位系统的极坐标图与(-1,j0)点的接近程度可以分别用极坐标图穿过负实轴的幅值和极坐标图幅值为1时的相角来表示。 定义极坐标图穿过负实轴(此时?(ω)=-180°)对应的频率为相角穿越频率,用ωg 表示; 定义幅值A (ω)=1对应的频率为幅值穿越频率,用ωc 表示。 当频率特性曲线穿过(-1,j0)点时,系统处于临界稳定状态。这时:A (ωg )=1, ?(ωc )=-180°,ωg =ωc 。 最小相位系统稳定的条件为:当A (ωc )=1时,?(ωc )>-180°当?(ωg )=-180°时A (ωg )<1
闭环系统的过冲和相位裕度关系的分
Overshoot as a Function of Phase Margin J. C. Daly Electrical and Computer Engineering University of Rhode Island 4/19/03 Figure 1 Figure 2 Amplifier frequency response. PM w t /w eq Q%OS 55o0.700 0.925 13.3% 60o0.580 0.817 8.7% 65o0.470 0.717 4.7% 70o0.360 0.622 1.4% 75o0.270 0.527 0.008%
When an amplifier with a gain A(s) is put in a feedback loop as shown in Figure 1, the closed loop gain, V o /V in = A CL (1) The system is unstable when the loop gain, ? A(s), equals -1. That is, ? A(s) has a magnitude of one and a phase of -180 degrees. An unstable system oscillates. A system close to being unstable has a large ringing overshoot in response to a step input. The phase margin is a measure of how close the phase of the loop gain is to -180 degrees, when the magnitude of the loop gain is one. The phase margin is the additional phase required to bring the phase of the loop gain to -180 degrees. Phase Margin = Phase of loop gain - (-180). The loop gain has a dominant pole at . Higher order poles can be represented by an equivalent pole at . The amplifier is approximated by a function with two poles as shown in Equation 2. (2) Since for frequencies of interest where the loop gain magnitude is close to unity, (3) And, (4) (5) Defining , Table I ? PM is the phase margin. ? w t is the unity gain frequency (rad/sec). ? w eq is the frequency of the equivalent higher order pole (rad/sec). ? Q is the system Quality factor. ? OS is the Over Shoot.
幅值裕量和相位裕量
一般来说,)(ωj G 的轨迹越接近与包围-1+j001j +-点,系统响应的震荡性越大。因此,)(ωj G 的轨迹对01j +-点的靠近程度,可以用来度量稳定裕量(对条件稳定系统不适用)。在实际系统中常用相位裕量和增益裕量表示。 Re Positive Phase Margin Negative Gain Margin Negative Stable System Unstable System (ωj G
64 ω Log ω Log ω Log ω Log ?-90? -270?-180Positive Gain Margin Positive Phase Margin Negative Gain Margin Negative Phase Margin Stable System Unstable System dB ? -90? -270?-1800 dB 图1 稳定系统和不稳定系统的相位裕度和幅值裕度 相位裕度、相角裕度(Phase Margin)γ 设系统的截止频率(Gain cross-over frequency)为c ω 1)()()(==c c c j H j G j A ωωω 定义相角裕度为 )()(180c c j H j G ωωγ+?= 相角裕度的含义是,对于闭环稳定系统,如果开环相频特性再滞后γ度,则系统将变为临界稳定。 当0>γ 时,相位裕量相位裕度为正值;当0<γ时,相位裕度为负值。为了使最小相位系统稳定,相位裕度必须为正。在极坐标图上的临界点为0分
贝和-180度。?-180 增益裕度、幅值裕度(Gain Margin)h 设系统的穿越频率(Phase cross-over frequency) πωωω?)12()()()(+== k j H j G x x x ,Λ,1,0±=k 定义幅值裕度为 ) ()(1 x x j H j G h ωω= 幅值裕度h 的含义是,对于闭环稳定系统,如果系统开环幅频特性再增大h 倍,则系统将变为临界稳定状态。 若以分贝表示,则有 )()(log 20)(x x j H j G dB h ωω-= 当增益裕度以分贝表示时,如果1>h ,则0)(>dB h 增益裕度为正值;如果1 1004-924X(2013)12-3214-09 确保稳定裕度的PID稳定域计算 赵秀伟1,2,3,任建岳1 1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院大学,北京100039;3.中国电子科技集团公司第四十五研究所,北京100176 摘要:在PID控制器稳定参数域的研究中,要求控制系统具有一定的稳定裕度,以便补偿被控对象模型的不确定性和PID控制器的参数漂移特性。本文扩展了传统稳定裕度(幅值裕度和相位裕度)的定义,定义了被控对象在PID控制下的4种稳定裕度。针对含有右半平面(RHP)极点和不含有RHP极点的两种被控对象,讨论了它们必然存在的稳定裕度。对于以这些稳定裕度作为性能指标约束的两类PID闭环控制系统,利用扩展Hurmite-Biehler定理给出了其PID稳定参数域的详细构建方法,并通过两个仿真实例对该方法进行了验证。结果表明,利用本文提出的方法可以得到满足稳定裕度条件的PID参数稳定域。 PID控制器;PID稳定域;幅值裕度;相位裕度;扩展Hurmite-Biehler定理; TP273 ; TP13A 10. 3788/OPE.20132112. 3214 Computation of PID stabilizing region with stabilized margins ZHAO Xiu-wei1 ,2,3 REN Jian-yue1 1. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033 ,China ; 2. University of Chinese Academy of Sciences ,Beijing 100039 ,China ; 3. No.45 Research Institute, China Electronics Technology Group Corporation, Beijing 100176, China Abstract: On research of the stabilizing region of a PID controller,the control system is required a stabilized margin to compensate the uncertainty of plant modeling and the parameter deviation of PID controller. This paper defines four types of stability margins for the plant under PID controller to extend the conventional definition of stability margins (gain margin and phase margin). Based on the presences of Right Half Plane(RHP) poles or not, the closed-loop systems are classified into two categories and their necessary stabilized margins are stated. A method of constructing PID stabilizing regions by using the generalized Hermite-Biehler theorems is proposed for the PID controlled closed-loop system to meet the prescribed performance of stability margins. Then, two examples are employed to test the validity of the method proposed. Obtained results demonstrate that the PID stabilizing regions with stabilized margins can really be gotten by the proposed method for both cases. 2013-07-262013-09-25 国家863高技术研究发展计划资助项目( No. 863-2-5-1-13B) 万方数据 电力系统稳定性综述 摘要:本文对电力系统的稳定性进行了概括性分析,介绍了电力系统中常用的分析方法,并对电力系统分析未来的发展进行了展望。 关键词:电力系统;稳定性 Abstract:this paper analysised the stability of power system synoptically, this paper introduced the common use of the power system analysis methods, and discussed the future development of the power system analysis. Key word:the power system ; stability 1 引言 电力系统是一个非线性动态系统,电压稳定是整个电力系统稳定的一个方面。CIGRE于1993年把电压稳定研究分为静态电压稳定和动态电压稳定,又进一步将动态电压稳定分为小扰动电压稳定、暂态电压稳定和长期电压稳定。此外为了区分:扰动后虽有平衡点但电压值不可接受与没有平衡点两种情况。CIGRE一方面将小扰动电压稳定定义为负荷电压接近于扰动前平衡点的电压值,将扰动后没有平衡点的情况定义为电压不稳定,而将扰动后有平衡点,但电压值过低的情况定义为电压崩溃。但另一方面却又认为电压不稳定性和电压崩溃这两个术语可以交换代用。 对电压崩溃机理进行探讨的目的是要弄清楚电压崩溃的本质及原因,电压稳定问题与电力系统中其它稳定问题的关系,电力系统中各种元件对电压稳定性的影响,从而建立适合于分析电压稳定问题的系统模型,提出电压稳定判据、电压稳定裕度指标和控制电压崩溃的措施。 2 电压稳定分析方法及评价 电压稳定的分析方法可以分为两类,一类是基于潮流方程的静态分析法,另一类是基于微分方程的动态分析法。动态分析法又可进一步分为小扰动分析法、暂态电压稳定分析法和长期电压稳定分析法。 静态电压稳定分析 目前有关静态电压稳定分析的研究都是基于潮流方程或经过修改的潮流方程。这一方面是因为许多学者认为电压稳定是一个潮流是否存在可行解的问题,因而把临界潮流解看作是电压稳定极限;另一方面也由于静态分析技术比较成熟,易于给出电压稳定裕度指标和其对状态变量的灵敏度信息,从而便于对系统的监控和优化调整。这一类分析方法主要有:潮流多解法、奇异值分解(特征结构分析)法和最大功率法等。潮流方程是非线性代数方程组,因而可能存在多个潮流解。潮流方程解的个数与负荷水平有关,最多可能有2n-1个;随着负荷的加重,解的个数成对减少,当系统接近极限运行状态时,潮流方程只存在两个解,且这两个解关于奇异点对称。这样就可以根据解的个数以及多解之间的距离来反映系统接近极限运行状态的程度。 P-V曲线和Q-V曲线只能用来分析单个节点的电压稳定性,而实际系统中电压稳定与否是与系统的运行模式密切相关的。Venikov等人川首次提出把潮流雅可比矩阵的奇异度作为系统电压稳定性的指标。Tiranuchit等人首次用潮流雅可比矩阵的最小奇异值来作为电压稳定性指标。利用潮流雅可比矩阵的稀疏特征,采用稀疏存储技术并对节点编号进行优化,可应用最优乘子法潮流程序求取迭代收敛时所对应的降阶雅可比矩阵J的因子表,根据逆迭代原理快速算出最小奇异值和相应的左、右奇异向量,并按此分 噪声裕度 噪声裕度 又称为噪声门限,Noise Margin,在大亚科技猫中为"SNR 裕量",数值越大,表明线路对干扰的容忍能力越强,反映连接速率越稳定,越不容易受干扰。需要注意的是,要注意上行噪声门限和下行上行噪声门限的值不能相差过大,否则也容易掉线,例如:上行8db,下行30db, 就说明线路质量有问题,虽然下行信号正常,但是由于上行信号数据有问题,那么在PPPOE模式下,故障现象为猫信号灯正常,但是频繁掉线,可以通过更换线路来解决。而且,在升级之后,猫的信号灯很少闪烁,仅靠状态灯来判断线路质量是否良好,已经不再准确了,而且由于这个原因,处理线路故障的难度也明显增大了。 信噪比裕度 信噪比,即SNR(Signal to Noise Ratio),又称为讯噪比。狭义来讲是指放大器的输出信号的电压与同时输出的噪声电压的比,常常用分贝数表示,设备的信噪比越高表明它产生的杂音越少。一般来说,信噪比越大,说明混在信号里的噪声越小,声音回放的音质量越高,否则相反。信噪比一般不应该低于70dB,高保真音箱的信噪比应达到110dB以上。 信噪比裕度(signal to noise ratio margin,SNR margin)是用来测量网路服务质量的,它表示了网络在噪涌的情况下无错误工作的能力,它是两个SNR值的差,一个是你目前网络的信噪比,一个是在目前速度下刚好能维持可靠连接的信噪比。一般家里1-2M的宽带,猫里面的这个数字在20-40dB就比较好,如果小于20dB,那么说明你线路质量不好,可能上网就会时断时续的而且网络也会比较慢。 相角裕度 相角裕度在开环对数频率特性上对应于幅值A(w)=1即20lg|A(w) |=0的角频率称为剪切频率,在剪切频率使系统达到稳定的临界状态所要附加的相角滞后量。称为相角裕度,以r或PM表示 PM=180+φ(w)。PM的含义是:对于闭环稳定系统,如果开环相频特性再滞后PM度,则系统将处于临界稳定状态 1. (本题请使用坐标纸)反馈系统的开环传递函数如下:试分别用奈氏判据或对数稳定判据判断闭环系统的稳定性,并确定系统的相角裕度和幅值裕度。 1) 100()s(0.21) G s s =+ 2) 50()(0.21)(s 2)(0.5) G s s s =+++ 3) 10()(0.11)(0.25s 1) G s s s =++ 4) 100(1)2()(1)(1)(1)1020 s G s s s s s +=+++ 2. 设单位反馈控制系统的开环传递函数21()as G s s += ,试确定相角裕度为45o 时的a 值。 厦门大学《自动控制原理》课程作业 航空航天学院 航 空 系 2018年级 飞动 专业 主讲教师: 董一巍 作业内容:(第14讲)稳定裕度 3. 系统中10(),()1(1) h G s H s K s s s ==+-。试确定闭环系统临界稳定时的h K 。 4. 某单位反馈控制系统的开环传递函数110()(0.11)(1)K G s s s s =++,当()10r t t =时,要求系统的速度稳态误差为0.2,试确定1K 并计算系统此时具有的相角裕度和幅值裕度,说明系统能否达到精度要求。 5. 某单位反馈的最小相角系统,其开环对数幅频特性如图1所示。要求 (1)写出系统开环传递函数; (2)利用相角裕度判断系统的稳定性; (3)将其对数幅频特性向右平移十倍频程,讨论对系统性能的影响。 图1 开环对数幅频特性 6. 某单位反馈的最小相角系统,其开环幅频特性曲线如图2所示。 图2 开环对数幅频特性 (1)写出系统的开环传递函数()G s 。 (2)计算系统的截止频率c ω和相角裕度γ。 (3)输入信号()1/2r t t =+时,计算系统的稳态误差ss e 。 7. 对于典型二阶系统,已知参数3n ω=,0.7ξ=,试确定截止频率c ω和相角裕度γ。 闭环极点法是以系统左平面共轭复极点到原点斜率的倒数的绝对值β来判断系统稳定性的方法,β越大,系统就越稳定。在存在减幅振荡的时候,能较好的描述和量化系统的稳定性。 若一个闭环系统阶跃响应出现减幅振荡,系统的闭环传输函数必然会出现左平面共轭复数根s = σ±ωj,阶跃响应会出现一个衰减指数项,形式是K × exp(σt) × sin(ωt) , 可以看作一个衰减的指数项乘以一个正常的sin函数。 现在以图1的常见二级运放为例,说明如何在spectre中运用闭环极点法来分析运放的稳定性,在这里只调整电容的值来改变运放的稳定性, 对运放进行闭环AC和pole-zero分析,再print pole-zero summary就可以看到零极点了。下面先把图表公式全部列出来,然后再进行具体分析。 图1 常见二级运放 实数极点共轭复极点 左平面单调指数减幅(稳定)减幅震荡(可能不稳定,视情况而定) 右平面单调指数增幅(不稳定)增幅震荡(不稳定) 注释: β: 比例因子,σ / ω的绝对值 PM : 相位裕度 σ:闭环极点的实部,可以由spectre仿真得到 ω:闭环极点的虚部,可以由spectre仿真得到 公式1:u(t)= K1+K2 × exp(σt) × sin(ωt) , σ是减幅震荡的衰减因子,ω是减幅震荡的频率公式2 :ωT= 2π,T是减幅震荡的周期 公式3:σ= -1 / τ , τ为时间常数 图2 PM=45度时的阶跃响应 图3 PM=45度时的极点分布 首先来分析PM=45的情况,阶跃响应和闭环极点如图2和图3所示,系统出现了左平面上的共轭复根, 时域上出现了减幅振荡。肉眼能分辨的震荡包括三个上凸,两个下凹,最后一个上凸不很明显,合共2.5个振荡周期T,这可以说明什么呢?其实一旦出现减幅振荡,理论上再过10年,振荡也不会变为0 ,但无论是考虑到噪声也好,波形软件能够到达的精度也好,减幅振荡一旦衰减到一定的程度,例如1% ,就能够认为振荡消失了。可以尝试计算下经过一个振荡周期波形能衰减到多少。这里经过的时间为t=2.5T,由公式1 和公式2 及β=0.36 可得t=2.5T=2.5×0.36 ×2π×τ=5.7×τ , 就是说指数项经过5.7τ的衰减变为原来的exp(σ×5.7×τ)=0.3% ,这说明指数衰减到约0.3%后,减幅震荡就消失了。确保稳定裕度的PID稳定域计算
电力系统稳定性分析
裕度
第五章 频域法稳定裕度
相位裕度