基于UC3854的APFC仿真验证

基于UC3854的APFC 仿真验证
一. 功率因数校正电路的工作原理
1. 高次谐波及其危害
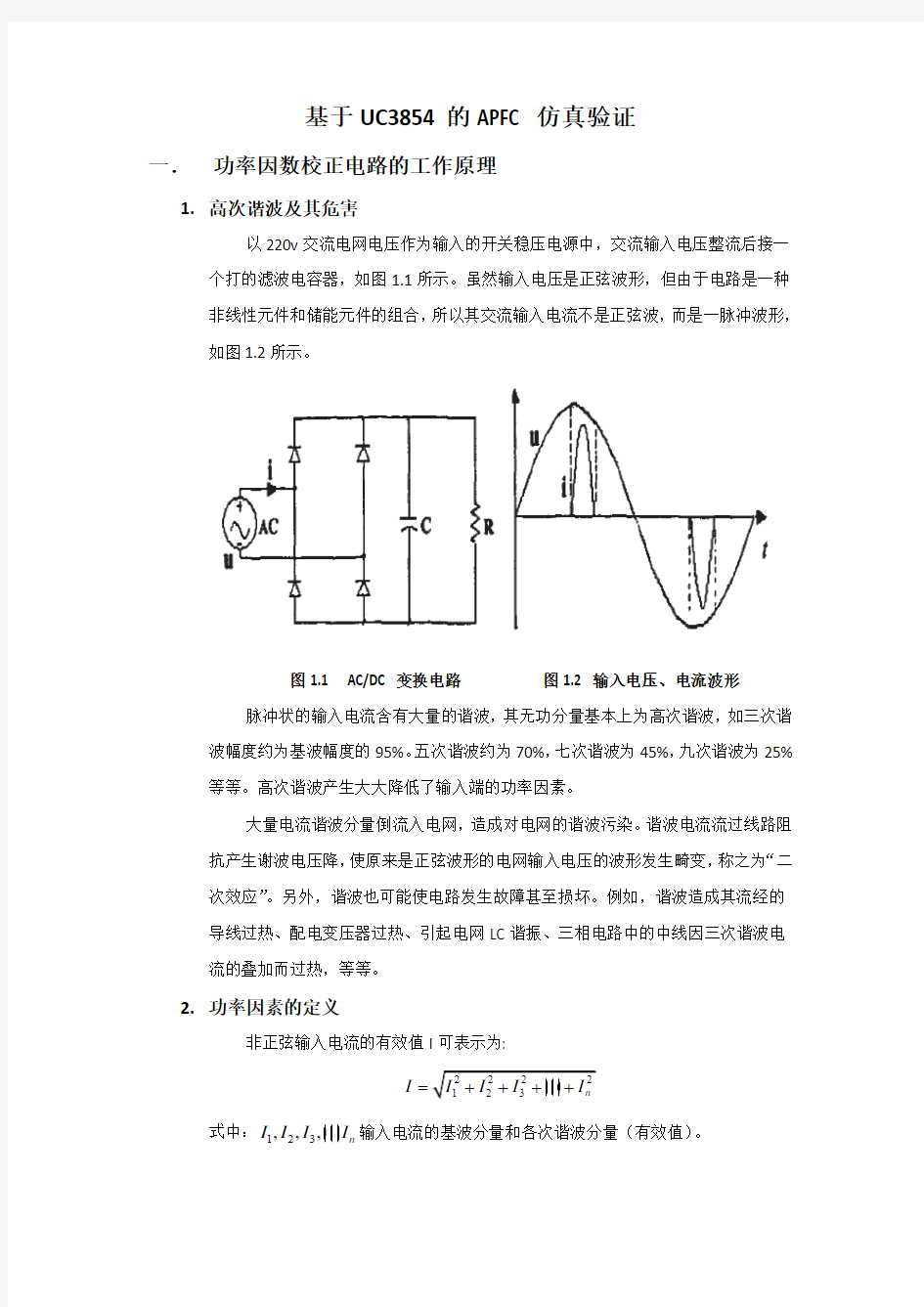
以220v 交流电网电压作为输入的开关稳压电源中,交流输入电压整流后接一个打的滤波电容器,如图1.1所示。虽然输入电压是正弦波形,但由于电路是一种非线性元件和储能元件的组合,所以其交流输入电流不是正弦波,而是一脉冲波形,如图1.2所示。
图1.1 AC/DC 变换电路 图1.2 输入电压、电流波形 脉冲状的输入电流含有大量的谐波,其无功分量基本上为高次谐波,如三次谐波幅度约为基波幅度的95%。五次谐波约为70%,七次谐波为45%,九次谐波为25%等等。高次谐波产生大大降低了输入端的功率因素。
大量电流谐波分量倒流入电网,造成对电网的谐波污染。谐波电流流过线路阻抗产生谢波电压降,使原来是正弦波形的电网输入电压的波形发生畸变,称之为“二次效应”。另外,谐波也可能使电路发生故障甚至损坏。例如,谐波造成其流经的导线过热、配电变压器过热、引起电网LC 谐振、三相电路中的中线因三次谐波电流的叠加而过热,等等。
2. 功率因素的定义
非正弦输入电流的有效值I 可表示为:
I =式中:123,,,n I I I I 输入电流的基波分量和各次谐波分量(有效值)
。
将各次谐波分量的有效值与基波分量的有效值的比值称之为总谐波畸变(THD )
:
THD =THD 用来衡量谐波对电网的污染程度。
若基波电流之后输入电压U 的相位差为α,那么,输入的有功功率ac P 为
1cos ac P UI α=
而视在功率为:
ap P U I U =*=
功率因素(PF )为:
1cos ac p ap P I f P I ααα====
所以,抑制谐波分量可以达到减小THD 和提高p f 的目的。
3. 功率因素校正的原理
为了提高功率因素,减小电流畸变,从20世纪80年代开始,将开关变换器技术应用到改善电流波形和提高功率因素上来,研发了功率因素校正(PFC )新技术。 PFC 电路的作用是在电网和负载间插入校正环节,是输入电流波形逼近输入电压波形,以提高功率因素并限制开关电源的谐波电流对电网的污染。
PFC 的方法很多,可按高频/低频、有源/无源、谐振/非谐振等来分类。目前采用较多的是高频有源PFC 技术。在有源PFC 中,Boost-PFC (升压式功率因素校正)是最为常见的一种。其原理图如图1.3:
图1.3 Boost-PFC 原理图
它是由单向桥式整流电路和DC/DC Boost 变换器组成。控制电路由电压误差放大器VA 、基准电压r U 、积分放大器CA 、乘法器M 、脉宽调制器(PWM )和驱动器等组成。主电路的输出电压为o U 和基准电压r U 在电压误差放大器VA 中比较,其输出误差电压和输入电压共同加在乘法器M 的输入端,它们的乘积作为电感电流和基准值。真正的电感电流L I 与基准电流在积分放大器中平均和补偿,积分放大器的输出电压与锯齿波电压在PWM 中比较,产生一个开关调制信号,经驱动器输出,驱动开关管Q 。这样一来,开关管Q 的驱动信号受控于输入电压i U 。在理想情况下,当输入电压按正弦规律变化时,输入平均电流也按正弦规律变化。这样,电流谐波大大减小,提高了功率因素。
4. APFC 的控制方法
有源功率因素校正的控制方法有三种:电流峰值控制法、电流滞环控制法和平均电流控制法。下表给出了三种方法的比较:
二. PFC 集成控制电路UC3854
1. UC3854特性
(1)升压式PWM 功率因数达0.99;
(2)交流电流失真小于5%;
(3)通用的操作方式,无需开关;
(4)前馈线性调整;
(5)平均电流模式控制;
(6)噪声灵敏度低;
(7)启动电流低;
(8)固定频率PWM控制;
(9)低偏值模拟乘法器/除法器;
(10)1A图腾极驱动;
(11)高精度基准电压。
2.UC3854引脚功能
图2为UC3854的方框图。此集成电路包括了控制功率因数的相关电路。UC3854是利用平均电流控制方式,并在宽广的电力技术和控制方式上有很强的应用性。
图2.1 UC3854方框图
图2的左上角是低压锁定比较器和ENA比较器,这两个比较器的输出保证具
V)连接与PIN11。电压误差放大有驱动功能。电压误差放大器的反相输入(
SENSE
器周围的二极管是表示内部线路的功能,而不是实际的设备装置。方框图所示的二极管是理想二极管,表示在正常操作条件下电压误差放大器的同相输出连接于7.5V 的参考电压,此电压也利用于缓开功能。该结构使得在输出电压到达操作点之前,主电压控制环开始工作,以消除是电源受到损坏的尖峰冲击。在PIN11和误差放大器的反相输入端之间接入的二极管也是理想二极管,对额外二极管上的电压降不会影响实际结果。
PIN7是电压误差放大器的输出端,它也是乘法器的输入端。乘法器的另外一个输入在PIN6,它是来自于输入整流后的调节信号的斜率,并保持6V的电位和一个电流的输入。前馈输入电压在PIN8,它的值在进入乘法器输入端钱,被进行平方
运算。PIN12的设置电流是用来限制乘法器的最大输出电流。乘法器的最大输出电流从PIN5流出(PIN5连接于电流误差放大器的同相输入端)。
电流误差放大器的反相输入连到PIN4,电流误差放大器的输出连接到PWM 发生器,与PIN14的三角波进行比较。PWM 发生器输出和振荡器连接到R-S 触发器,从R-S 触发器输出大电流到PIN16。在UC3854内部将输出电压钳位在15V ,这样MOSFET 不会有门极过压驱动风险。在PIN2提供紧急峰值电流极限,通过快速拉升来关闭输出脉冲。参考电压被连接PIN9。UC3854的电源被连接到PIN15。
在图2所示的框图中可以看到,UC3854有一个乘法器和一个除法器,其输出为/A B C ,而C 为前馈电压s U 的平方。之所以要除C ,是为了保证在高功率因素的条件下,是APFC 的输入功率不随输入电压变化而变化。在应用中应注意:前馈电压中任何100Hz 纹波进入乘法器都会和电压误差放大器中的纹波叠加,从而增加波形失真,也会影响功率因素的提高。另外,前馈电容f C 的取之大小也会影响功率因素。
3. 具体应用电路
图2.2 UC3854典型应用电路
图2.2 Boost 电路采用UC3854芯片对其进行功率因数校正,Boost 电路的输入
为200V,50Hz的交流电,采用平均电流控制方式。
4.系统仿真验证
运用saber可建立起整个闭环控制系统的控制仿真模型。控制系统仿真中的模型的特点无量纲、单向流动,所以在控制系统和模拟系统混合仿真的时候要进行信号转换,这就需要中间模块,saber元件库中的Interface Models可以实现这一职能。输入电压为220V,负
μ时,得到变换器的动态过程如图2.3所示,从图2.3中载电阻为500Ω,输出电容为450F
可以清楚地看到变换器上电后的动态过程,其中输出电压略有超调,待动态过程结束后,电感电流的平均值呈现正弦半波,图2.3(c)这时输入电流与输入电压为频率和相位都相同的正弦波,功率因数接近为l,实现了电路的功率因数校正功能,同时输出电容电压也呈现周期波动,频率为输入正弦波频率的两倍。
(a)输出电容电压波形
(b)电感电流波形
(c)电感电流波形与整流后输入电压波形比较
图2.3 saber仿真结果
三.结论
本文强调了功率因数校正的重要性,针对常用的APFC的方法,引出了单周期控制PFC控制策略,首先对其工作原理作了详细的分析,最后搭建实验模型在软件中进行了仿真,进行了实验结果分析,充分验证了单周期PFC控制策略的可行性和正确性,达到了学习和设计的要求。
系统仿真测试平台
仿真测试系统 系统概述 FireBlade系统仿真测试平台基于用户实用角度,能够辅助进行系统方案验证、调试环境构建、子系统联调联试、设计验证及测试,推进了半实物仿真的理论应用,并提出了虚拟设备这一具有优秀实践性的设计思想,在航电领域获得了广泛关注和好评 由于仿真技术本身具备一定的验证功能,因此与现有的测试技术有相当的可交融性。在航电设备的研制和测试过程中,都必须有仿真技术的支持:利用仿真技术,可根据系统设计方案快速构建系统原型,进行设计方案的验证;利用仿真验证成果,可在系统开发阶段进行产品调试;通过仿真功能,还可对与系统开发进度不一致的子系统进行模拟测试等。 针对航电设备产品结构和研制周期的特殊性,需要建立可以兼顾系统方案验证、调试环境构建、子系统联调联试、设计验证及测试的系统仿真平台。即以半实物仿真为基础,综合系统验证、系统测试、设备调试和快速原型等多种功能的硬件平台和软件环境。 目前,众多研发单位都在思索着如何应对航电设备研制工作日益复杂的情况。如何采取高效的工程技术手段,来保证系统验证的正确性和有效性,是航电设备系统工程的重要研究内容之一,FireBlade 系统仿真测试平台正是在这种大环境下应运而生的。 在航电设备研制工程中的定位设备可被认为是航电设备研制工程中的终端输出,其质量的高低直接关系到整个航电设备系统工程目标能否实现。在传统的系统验证过程中,地面综合测试是主要的验证手段,然而,它首先要求必须完成所有分系统的研制总装,才能进行综合测试。如果能够结合面向设备的仿真手段,则可以解决因部分设备未赶上研发进度导致综合测试时间延长的问题。在以往的开发周期中,面向设备的仿真技术并没有真正得到重视: (1)仿真技术的应用主要集中在单个测试对象上,并且缺乏对对象共性的重用; (2)仿真技术缺乏对复杂环境与测试对象的模拟; (3)仿真技术的应用缺乏系统性,比如各个阶段中仿真应用成果没有实现共享,
一种基于仿真测试平台的实物自动化测试环境
一种基于仿真测试平台的实物自动化测试环境 摘要 针对FPGA软件测试过程中仿真测试和实物测试的不足,提出了一种基于仿真测试用例的实物自动化测试环境,将用于仿真测试的Testbench进行解析处理,形成能够用于FPGA 实物测试的传输信号,通过执行器将此信号转换为作用于被测FPGA芯片的实际信号,并采集被测FPGA芯片的响应,实现对FPGA的实物自动化测试。采用实物自动化测试环境验证平台对设计架构进行了验证,取得了良好的效果。 0 引言 随着FPGA设计规模的不断扩大,因FPGA软件设计而造成的质量问题也越来越突出,成为影响装备质量的重要因素。而测试是当前解决该问题的最有效手段,因此,越来越多的型号装备产品定型过程对FPGA软件测试提出了新的要求[3]。 然而FPGA测试与常规软件测试不同,因其测试环境限制,测试过程需大量依赖于仿真和分析的方法[4],而在实际芯片中开展的测试往往是板级、系统级测试,测试结果可信度低且无法有效发现FPGA软件设计缺陷[5-6]。为此,本文提出了一种基于仿真测试平台Testbench数据的自动化测试环境框架,测试结果具有较高的可信度,能够有效提高FPGA 测试质量。 1 FPGA动态测试概述1.1 FPGA动态测试环境原理 当前型号装备FPGA定型测试过程主要方法包括设计检查、功能仿真、门级仿真、时序仿真、静态时序分析、逻辑等效性检查和实物测试。其中功能仿真、门级仿真、时序仿真和实物测试均为动态测试,开展测试时需依据测试要求,建立FPGA运行的外围环境,根据测试对象的不同,可将此类环境分为仿真测试环境和实物测试环境。 采用仿真测试环境时,需根据测试用例将测试数据映射为不同时刻下的不同信号值,形成仿真测试平台文件Testbench,通过仿真测试工具将被测FPGA产生的响应进行采集和自动判断,形成测试结论[7]。
系统仿真与软件工程
系统仿真与软件工程 2320120921 徐子棋一、软件本身就是现实的仿真 软件可以理解为数据与算法的合集,经过几十年的发展,软件从解决单一问题的一个小程序,发展到适应各个领域的复杂庞大的程序集合。而软件开发的过程就是将现实中的逻辑转换为可以被计算机解读的语言,使用计算机来实现以前需要人工处理的任务,利用计算机的高速以及规范等特性,减少人的工作量,降低管理成本。 例如最常见的行业管理软件,就是包含了行业管理业务共性的程序集合,通过行业管理软件,这个行业中的从业人员可以通过软件的帮助进行业务管理、数据分析,同时受限于软件中设置的限制条件,从而使得从业人员必须遵守一些硬性的规定,从而将管理风险从事后监督转化为事前防范,大幅度降低企业的管理难度,而这个过程本身,就是一种管理逻辑的仿真和抽象。 在理想的情况下,如果不考虑计算机的计算和存储能力的限制,可以说,任何现实的情况都可以通过软件工程的方式来开发仿真系统。 二、系统仿真与软件工程结合的必要性 由于复杂系统在构成、过程和状态等方面具有繁杂、庞大和跨学科等特点,复杂系统仿真软件的开发与软件工程的结合就显得越来越有必要。为了应对复杂仿真系统的特点,能够适应仿真软件的开发方法必须具有如下特点: 1.方法必须覆盖复杂系统仿真软件分析、设计中需要关注的主体,能 有效的指导软件实现。 2.能帮助开发者循序渐进的对复杂系统中的数据和算法进行有效的归 纳,降低开发难度。 3.建立的软件具有直观、简单和易于理解的组织结构。 4.能为仿真软件形成标准化的文档。 5.能服务于大兴仿真软件的开发管理。 三、一种适用于系统仿真软件开发的方法 在前期的学习中,接触到一种复杂系统软件工程化开发过程:SPCSS (Software Process of Complex System Simulation)。SPCSS是基于传统瀑布模型,从时间顺序上将复杂系统仿真软件的开发分为需求阶段、分析阶段、设计阶段和实现阶段;在各个阶段中,根据复杂系统仿真软件开发的内在需要,裁剪和补充了统一过程中的工作流,但不像统一过程对这些工作流进行增量式的迭代。这是因为仿真软件的基础是被仿真的系统的数学模型,数学模型
协同式虚拟现实仿真验证平台方案
中国航天科工集团第六研究院协同式虚拟现实仿真验证平台方案 北京朗迪锋科技有限公司 2016年4月
目录 1.序言 (3) 2.用户需求分析 (3) 3.协同式虚拟现实仿真验证平台总体解决方案 (4) 3.1.协同式虚拟现实仿真验证平台解决方案 (5) 3.1.1............................................ 显示系统设计思路 5 3.2.图形工作站集群 (19) 3.3.交互系统 (19) 3.4.矩阵切换系统 (21) 3.5.中控系统 (21) 3.6.音响系统 (22) 3.7.协同式虚拟仿真验证平台软件 (22) 3.7.1....................... 协同式虚拟仿真验证平台软件应用模式 22 第六:制作交互式电子手册 .................. 错误!未定义书签。 3.7.2.......................... 协同式虚拟仿真验证平台软件的特点 24 4.布局设计 (26) 5.项目实施计划 (26) 5.1.项目实施内容 (26) 5.2.项目整体实施周期 (26) 5.3.工期保证措施 (26) 5.4.项目管理与风险控制 (26) 6.工程进度 (26) 6.1.设备交付阶段及设备到货点验计划表 (26) 6.2.工程师人员调配安排计划表 (26) 7.装修建议及要求 (26)
7.1.环境条件要求 (27) 7.2.地面要求 (27) 7.3.照明要求 (27) 7.4.天花板及吊顶装修建议 (27) 7.5.布线基本原则 (27) 7.6.设备发热量和制冷要求 (27) 7.7.虚拟现实中心现场装修建议 (27) 7.8.现场出入要求 (27) 8.质量保证与售后服务 (27) 8.1.质量保证与保修 (27) 8.2.售后技术服务 (27) 8.3.技术培训 (27) 9.系统配置清单 (27)
嵌入式系统仿真测试平台的体系结构研究
!"##!年第$期 福建电脑注:本文得到广东省科技厅攻关项目资金资助%项目编号"##"&’(&)电子科技大学青年基金项目资助%项目编号*+#"#,#-。 &、 引言目前嵌入式系统开发已经成为了计算机工业最热门的领域之一,嵌入式系统应用渗透到信息家电、工业控制、通信与电子设备、人工智能设备等诸多领域。然而嵌入式系统的软件与目标硬件紧密相关,软件开发周期长,开发成本昂贵,软件质量无法保障.&/."/。特别是嵌入式软件的测试工作,在整个开发周期中通 常占用着大部分时间 (-#01,#0)。软件测试是一个非常重要而又艰苦的过程。软件测试工具用来全部或部分的代替人工进行软件的测试工作。它能极大的节省人力、物力和财力,缩短项目的开发周期。 国际上,许多软件公司致力于开发功能强大的软件测试工具。按获得测试信息的方式分为纯硬件、纯软件、软硬件相结合三种类型的测试工具。纯硬件测试工具如仿真器、逻辑分析仪、开发系统等。纯软件测试工具如234563786的2345938:,是一种软件逻辑分析仪。软硬件相结合的测试工具如以;<公司的=>?938:为代表的虚拟仪器和以@AB 公司的BC58DEFD 为代表的测试工具。这三类测试工具都有一个缺点:没有提供一个集成各种软硬件测试工具的框架,使各类测试工具能紧密协调工作。 为提高测试工作的效率,迫切需要功能强大的嵌入式系统测试工具。 仿真开发在嵌入式系统开发中正在发挥着越来越重要的作用。许多软件公司已经开发出成熟稳定的嵌入式仿真开发工具。但是在嵌入式仿真开发中,仍然缺乏一种嵌入式系统测试工具的集成框架。本文正是基于这个目标,从软件体系结构的角度,研究和设计了一种称为G EFDH G 的嵌入式系统仿真测试平台的集成框架。并基于其上实现了一个嵌入式仿真测试平台3I >EFDH 。 "、 嵌入式系统仿真测试平台的体系结构EFDH 对于大规模复杂软件系统,其总体结构设计远比算法和数据结构的选择更重要.J /.!/。基于这样的认识和背景,本文在对嵌入式测试和嵌入式仿真开发深入研究的基础上,研究和设计了EFDH 的体系结构。"K &EFDH 的结构模型 EFDH 的体系结构主要借鉴了当前流行的嵌入式交叉开发工具的目标服务器L 目标代理结构.’/,分为宿主机端和仿真目标机端两大部分。 EFDH 的结构模型见图&: 图&EFDH 结构模型 EFDH 结构模型的基本特征:&M EFDH 由宿主机端和目标机端两大部分构成,宿主机 端以测试服务器DF (D8NO F86786)为核心;目标机端以测试代理D@P D8NO @Q84O M 为核心。 "M 所有的测试工具不与目标机端交互, 而只与测试服务器DF 进行交互;测试服务器DF 同测试代理D@交互。这样只要更换相应的测试代理D@,即可与不同的仿真开发系统一起工作。 J M 测试服务器DF 与所有测试工具之间通过嵌入式仿真测试工具交换协议EFDDR (ES?85585F3STU>O3C4D8NO DCCU 8RI VW>4Q8X6COCVCU ) 规范接口进行交互。!M 测试服务器DF 和测试代理D@之间通过嵌入式仿真测试协议EFD P ES?85585F3STU>O3C4D8NO X6COCVCU M 规范接口进行交互。 ’M 测试工具以软插件的形式集成到EFDH 中%EFDDR 和EFD 规范定义的接口是公开的和可免费获得的,第三方测试工具非常容易的集成到EFDH 中来。 -M 测试工具多种多样,可以是软件代码测试工具,也可以是硬件诊断测试工具,都可以很容易的集成到EFDH 中来,从而达到各类测试工具的紧密协作。 $M EFDH 中各类测试工具紧密集成到一个图形用户接口中,大大提高了用户的工作效率。 ,M 测试代理D@以一个线程的形式存在于仿真运行环境中,与各类模拟器之间通过固定的接口交互,获取丰富的测试信息。 "K "测试服务器DF 模型 测试服务器DF 是EFDH 的核心结构部件,作为EFDH 的测试管理器,其结构模型如图"。 图"测试服务器DF 结构模型 DF 的主要功能:&M DF 提供相应的EFDDR 协议规范接口,接受来自测试工具的控制命令和状态查询,并提供相应的数据传输接口,向测试工具返回对应的测试结果。 "M DF 提供相应的EFD 协议规范接口,向采集代理发送控制命令信息和状态查询信息,并且根据EFD 协议规范提供的接口收取返回信息。 J M DF 提供测试高速缓冲管理、 测试存储器管理以及流测试协议,管理和控制整个宿主机端。"K J 测试代理D@模型 嵌入式系统仿真测试平台的体系结构研究 邵荣防,罗克露 P 电子科技大学计算机科学与工程学院,四川 成都-&##’!M 【摘要】仿真开发在嵌入式开发中正逐步成为热点,仿真测试工具在仿真开发过程中正发挥着日益重要的作用。本文首先简要分析了当前的嵌入式测试工具,然后给出一种嵌入式仿真测试平台的体系结构EFDH 。基于EFDH 体系结构,实现了一个面向信息家电的嵌入式仿真测试平台3>EFDH 。 【关键词】嵌入式系统仿真开发 仿真测试平台
CFD仿真验证及有效性指南
CFD仿真验证及有效性指南 摘要 本文提出评估CFD建模和仿真可信性的指导方法。评估可信度的两个主要原则是:验证和有效。验证,即确定计算模拟是否准确表现概念模型的过程,但不要求仿真和现实世界相关联。有效,即确定计算模拟是否表现真实世界的过程。本文定义一些重要术语,讨论基本概念,并指定进行CFD仿真验证和有效的一般程序。本文目的在于提供验证和有效的重要问题和概念的基础,因为一些尚未解决的重要问题,本文不建议作为该领域的标准。希望该指南通过建立验证和有效的共同术语和方法,以助于CFD仿真的研究、发展和使用。这些术语和方法也可用于其他工程和科学学科。 前言 现在,使用计算机模拟流体的流动过程,用于设计,研究和工程系统的运行,并确定这些系统在不同工况下的性能。CFD模拟也用于提高对流体物理和化学性质的理解,如湍流和燃烧,有助于天气预报和海洋。虽然CFD模拟广泛用于工业、政府和学术界,但目前评估其可信度的方法还很少。这些指导原则基于以下概念,没有适用于所有CFD模拟的固定的可信度和精确度。模拟所需的精确度取决于模拟的目的。 建立可信度的两个主要原则是验证和有效(V&V)。这里定义,验证即确定模型能准确表现设计者概念模型的描述和模型解决方案的过程,有效即确定预期模型对现实世界表现的准确度的过程。该定义表明,V&V的定义还在变动,还没有一个明确的最终定义。通常完成或充分由实际问题决定,如预算限制和模型的预期用途。复合建模和计算模拟没有任何包括准确性的证明,如在数学分析方面的发展。V&V的定义也强调准确度的评价,一般在验证过程中,准确度以对简化模型问题的基准解决方法符合性确定;有效性时,准确度以对实验数据即现实的符合性确定。 通常,不确定性和误差可视为与建模和仿真准确度相关的正常损失。不确定性,即在任一建模过程中由于缺乏知识导致的潜在缺陷。知识缺乏通常是由对物理特性或参数的不完全了解造成的,如对涡轮叶片表面粗糙度分布的不充分描述。知识缺乏的另一个原因是物理过程的复杂性,如湍流燃烧。误差即在建模和
单片机系统设计与仿真软件
(此文档为word格式,下载后您可任意编辑修改!) PROTEUS —单片机系统设计与仿真软件 一、Proteus 6.7 Professional 界面简介 安装完Proteus 后,运行ISIS 6.7 Professional,会出现以下窗口界面: 为了方便介绍,分别对窗口内各部分进行中文说明(见上图)。下面简单 介绍各部分的功能: 1.原理图编辑窗口(The Editing Window):顾名思义,它是用来绘制原理 图的。蓝色方框内为可编辑区,元件要放到它里面。注意,这个窗口是没有滚动条的,你可用预览窗口来改变原理图的可视范围。 2.预览窗口(The Overview Window):它可显示两个内容,一个是:当你 在元件列表中选择一个元件时,它会显示该元件的预览图;另一个是,当你的鼠标焦点落在原理图编辑窗口时(即放置元件到原理图编辑窗口后或在原理图编辑窗口中点击鼠标后),它会显示整张原理图的缩略图,并会显示一个绿色的方框,绿色
的方框里面的内容就是当前原理图窗口中显示的内容,因此,你可用鼠标在它上面点击来改变绿色的方框的位置,从而改变原理图的可视范围。 3.模型选择工具栏(Mode Selector Toolbar): 主要模型(Main Modes): 1* 选择元件(components)(默认选择的) 2* 放置连接点 3* 放置标签(用总线时会用到) 4* 放置文本 5* 用于绘制总线 6* 用于放置子电路 7* 用于即时编辑元件参数(先单击该图标再单击要修改的元件) 配件(Gadgets): 1* 终端接口(terminals):有VCC、地、输出、输入等接口 2* 器件引脚:用于绘制各种引脚 3* 仿真图表(graph):用于各种分析,如Noise Analysis 4* 录音机 5* 信号发生器(generators) 6* 电压探针:使用仿真图表时要用到 7* 电流探针:使用仿真图表时要用到 8* 虚拟仪表:有示波器等 2D图形(2D Graphics): 1* 画各种直线 2* 画各种方框 3* 画各种圆 4* 画各种圆弧 5* 画各种多边形 6* 画各种文本 7* 画符号 8* 画原点等 4.元件列表(The Object Selector): 用于挑选元件(components)、终端接口(terminals)、信号发生器(generators)、仿真图表(graph)等。举例,当你选择“元件(components)”,单击“P”按钮会打开挑选元件对话框,选择了一个元 件后(单击了“OK”后),该元件会在元件列表中显示,以后要用到该 元件时,只需在元件列表中选择即可。 5.方向工具栏(Orientation Toolbar):
电力系统仿真软件介绍
电力系统仿真软件 电力系统仿真软件简介 一、PSAPAC 简介: 由美国EPRI开发,是一个全面分析电力系统静态和动态性能的软件工具。 功能:DYNRED(Dynamic Reduction Program):网络化简与系统的动态等值,保留需要的节点。 LOADSYN(Load Synthesis Program):模拟静态负荷模型和动态负荷模型。 IPFLOW(Interactive Power Flow Program):采用快速分解法和牛顿-拉夫逊法相结合的潮流分析方法,由电压稳态分析工具和不同负荷、事故及发电调度的潮流条件构成。 TLIM(Transfer Limit Program):快速计算电力潮流和各种负荷、事故及发电调度的输电线的传输极限。 DIRECT:直接法稳定分析软件弥补了传统时域仿真工作量大、费时的缺陷,并且提供了计算稳定裕度的方法,增强了时域仿真的能力。 LTSP(Long Term Stability Program):LTSP是时域仿真程序,用来模拟大型电力系统受到扰动后的长期动态过程。为了保证仿真的精确性,提供了详细的模型和方法。 VSTAB(Voltage Stability Program):该程序用来评价大型复杂电力系统的电压稳定性,给出接近于电压不稳定的信息和不稳定机理。为了估计电压不稳定状态,使用了一种增强的潮流程序,提供了一种接近不稳定的模式分析方法。 ETMSP(Extended Transient midterm Stability Program):EPRI为分析大型电力系统暂态和中期稳定性而开发的一种时域仿真程序。为了满足大型电力系统的仿真,程序采用了稀疏技术,解网络方程时为得到最合适的排序采用了网络拓扑关系并采用了显式积分和隐式积分等数值积分法。 SSSP(Small-signal Stability Program):该程序有助于局部电厂模式振荡和站间模式振荡的分析,由多区域小信号稳定程序(MASS)及大型系统特征值分析程序(PEALS)两个子程序组成。MASS程序采用了QR变换法计算矩阵的所有特征值,由于系统的所有模式都计算,它对控制的设计和协调是理想的工具;PEALS使用了两种技术:AESOPS算法和改进Arnoldi 方法,这两种算法高效、可靠,而且在满足大型复杂电力系统的小信号稳定性分析的要求上互为补充。 二、EMTP/ATP 简介: EMTP是加拿大H.W.Dommel教授首创的电磁暂态分析软件,它具有分析功能多、元件模型全和运算结果精确等优点,对于电网的稳态和暂态都可做仿真分析,它的典型应用是预测电力系统在某个扰动(如开关投切或故障)之后感兴趣的变量随时间变化的规律,将EMTP 的稳态分析和暂态分析相结合,可以作为电力系统谐波分析的有力工具。 ATP(The alternative Transients Program)是EMTP的免费独立版本,是目前世界上电磁暂态分析程序最广泛使用的一个版本, 它可以模拟复杂网络和任意结构的控制系统,数学模型广泛,除用于暂态计算,还有许多其它重要的特性。ATP程序正式诞生于1984年,由Drs.
Matlab与系统仿真试题及答案
Matlab 与系统仿真试题及答案 一、填空题(每空2分,共30分) 1、单位取样序列定义为________________。 2、单位阶跃序列定义为__________________。 3、取样定理中,采样频率和原始信号频率之间至少应该满足公式_______________。 4、实现IIR 滤波器可以采用三种不同的结构:_______________、__________________和_______________。 5、对于理想的滤波特性()jw H e ,相应的()d h n 一般为无限时宽,从而使非因果的。为此,使显示一般通过如下公式__________实现加窗处理,相应的傅里叶表达形式为_________________。 6、设计IIR 滤波器的基础是设计模拟低通滤波器的原型,这些原型滤波器有:_________、________和______________低通滤波器。 7、实现FIR 滤波器可以采用以下4中结构: ________________,_______________,______________和____________。 二、阅读下列Matlab 程序,并回答完成的功能(每题5分,共10分) 1、f=[00.60.61]; m=[1100]; b=fir2(30,f,m); [h ,w]=freqz(b,1,128); Plot(f,m,w/pi,abs) 本段程序的功能是:
2、[b ,a]=butter(9,300/500,’high’); Freqz(b,a,128,1000) 本段程序的功能是: 三、用Matlab 语言编程实现下列各小题(每小题15分,共60分) 1、产生序列0.3,16p s A dB πΩ==55n -≤≤,并绘出离散图,标注图形标题为“Sequence in Example 3.1a”。 实现程序如下:
实验一 软件仿真器Simulator的使用方法
实验一软件仿真器Simulator的使用方法 一、实验目的 1、了解DSP开发系统平台的构成。 2、了解Code Composer Studio 3.3 的操作环境和基本功能。了解DSP软件开发过程。 二、实验要求 按照实验步骤熟练掌握CCS的使用方法。 三、实验设备 PC一台;操作系统为Windows XP;安装Code Composer Studio 3.3 四、实验原理 开发TMS320C5000应用系统一般需要以下几个调试工具来完成: (1)软件集成开发环境(Code Composer Studio3.3):主要完成系统的软件开发和调试。它提供一整套的程序编制、维护、编译、调试环境,能将汇编语言和C语 言程序编译连接生成COFF格式的可执行文件,并能将程序下载到目标DSP上 运行调试。 (2)开发系统(ICETEK 5100 USB):实现硬件仿真调试时与硬件系统的通信,控制和读取硬件系统的状态和数据。 (3)评估模块(ICETEK VC5416-A):提供软件运行和调试的平台和用户系统开发的参照。 五、实验步骤 1、启动Code Composer Studio 3.3 双击桌面“CCS3.3(C5000)”,启动Code Composer Studio 3.3; 2、创建工程 (1)创建新的工程文件 选择菜单Project的“new…”项;在Project Creation 对话框中,在project项输入 volume;单击location项末尾的浏览按钮,改变目录到 C:\ICETEK-VC5416-EDULAB\Lab01-UseCC,单击OK;单击完成;这时建立的是 一个空的工程,展开主窗口左侧工程管理窗口中Projects下新建立的“volume.pjt”,其中各项均为空。 (2)在工程文件中添加程序文件
协同式虚拟现实仿真验证平台方案
中国航天科工集团第六研究院 协同式虚拟现实仿真验证平台方案 北京朗迪锋科技有限公司 2016年4月 目录 1.序言........................................... 错误!未定义书签。 2.用户需求分析................................... 错误!未定义书签。 3.协同式虚拟现实仿真验证平台总体解决方案......... 错误!未定义书签。 .协同式虚拟现实仿真验证平台解决方案 ....... 错误!未定义书签。 显示系统设计思路...................... 错误!未定义书签。 .图形工作站集群 ........................... 错误!未定义书签。 .交互系统 ................................. 错误!未定义书签。 .矩阵切换系统 ............................. 错误!未定义书签。 .中控系统 ................................. 错误!未定义书签。 .音响系统 ................................. 错误!未定义书签。 .协同式虚拟仿真验证平台软件 ............... 错误!未定义书签。
协同式虚拟仿真验证平台软件应用模式.... 错误!未定义书签。 第六:制作交互式电子手册 ................... 错误!未定义书签。 协同式虚拟仿真验证平台软件的特点...... 错误!未定义书签。 4.布局设计....................................... 错误!未定义书签。 5.项目实施计划................................... 错误!未定义书签。 .项目实施内容 ............................. 错误!未定义书签。 .项目整体实施周期 ......................... 错误!未定义书签。 .工期保证措施 ............................. 错误!未定义书签。 .项目管理与风险控制 ....................... 错误!未定义书签。 6.工程进度....................................... 错误!未定义书签。 .设备交付阶段及设备到货点验计划表 ......... 错误!未定义书签。 .工程师人员调配安排计划表 ................. 错误!未定义书签。 7.装修建议及要求................................. 错误!未定义书签。 .环境条件要求 ............................. 错误!未定义书签。 .地面要求 ................................. 错误!未定义书签。 .照明要求 ................................. 错误!未定义书签。 .天花板及吊顶装修建议 ..................... 错误!未定义书签。 .布线基本原则 ............................. 错误!未定义书签。 .设备发热量和制冷要求 ..................... 错误!未定义书签。 .虚拟现实中心现场装修建议 ................. 错误!未定义书签。 .现场出入要求 ............................. 错误!未定义书签。 8.质量保证与售后服务............................. 错误!未定义书签。 .质量保证与保修 ........................... 错误!未定义书签。 .售后技术服务 ............................. 错误!未定义书签。 .技术培训 ................................. 错误!未定义书签。 9.系统配置清单................................... 错误!未定义书签。
虚拟仿真实验平台使用教程
虚拟仿真实验平台使用教程 一、首次使用 1. 虚拟仿真实验平台登录网址为::6050 2. 点击右上角“系统使用说明(首次登录必看)” 3. 根据视频教程安装虚拟运行环境 4. 查看系统各模块的视频教程
二、预习测试 1. 登录仿真平台(初始账号密码均为10位学号,登录后请设置邮箱和密保问题, 设置后可以自行找回密码) 2. 进入“实验预习系统” 3. 在“完成预习”选项卡下进入预习,根据提示完成预习测试题。 注意:“实验预习系统”仅具有答题功能,请同学们完成预习测试题前先在“仿真实验V4.0”系统进行实验学习!
三、仿真实验 1. 进入“仿真实验V4.0” 2. 进入各实验项目进行学习和实验 3. 实验操作由系统评分,同时考察实验操作过程和测量数据情况。 注意:请在结束实验操作前截图保存原始数据,以进行后续的数据处理和报告撰写,实验结束后无法查看原始数据!
四、实验报告提交 1. 完成虚拟仿真实验后,在“开始实验”选项卡下点击“上传实验报告” 2. 点击“报告模板下载”按钮下载该实验的报告模板,根据模板要求完成实验报告并上传。 3. 在教师评阅前实验报告可多次上传,新上传的实验报告会覆盖之前上传的。 五、技术问题 1. 虚拟仿真实验平台使用过程中遇到技术问题时,可在“虚拟仿真实验环境安装
及使用问题解决方案”中查找解决方案。 2. 遇到无法解决的问题,同学们可以将问题反馈给学习委员,由学习委员在“物理实验课程通知群”统一反馈给实验指导教师和公司技术人员。 附:虚拟仿真实验环境安装及使用问题解决方案
虚拟仿真实验环境安装及使用问题解决方案 1. 安装过程中如果遇到如图所示的情况 解决方案:请关闭杀毒软件(360安全卫士,360管家,联想电脑管家,鲁大师等),再重新安装,如果还不行就按照如下链接给注册表权限再安装
物流系统建模与仿真软件简介
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。
二、成功仿真研究的步骤 对于每一个成功的仿真研究项目,其应用都包含着特定的步骤。不论该研究的类型和目的,仿真的过程是保持不变的。一般要进行如下9 步 1.问题定义 2.制定目标 3.描述系统并对所有假设列表 4.罗列出所有可能替代方案 5.收集数据和信息 6.建立计算机模型 7.校验和确认模型 8.运行模型 9.分析输出 下面对这九步作简洁的定义。它不是为了引出详细的讨论,仅仅起到抛砖引玉的作用。注意仿真研究不能简单遵循这九步的排序,有些项目在获得系统的内在细节之后,可能要返回到先前的步骤中去。同时,检验和确认将贯穿于仿真工程的每一个步骤当中。 1.问题的定义 一个模型不可能呈现被模拟的现实系统的所有方面,有时是因为太昂贵。另外,假如一个表现真实系统所有细节的模型也常常是非常差的模型,因为它将过于复杂和难于理解。因此,明智的做法是:先定义问题,再制定目标,再然后构建一个能够完全解决问题的模型。在问题定义阶段,对于假设要小心谨慎,不要做出错误的假设。例如,假设叉车等待时间较长,比假设没有足够的接收码头要好。作为大纲,制定问题的陈述越普通越好,考虑到值问题的原因,然后尽可能将问题定义的专业化。 2.制定目标和定义系统效能测度 没有目标的方针研究是毫无用途的。目标是仿真工程所有步骤的导向。系统的定义是基于 系统目标的;目标决定了该作出怎样的假设;目标决定了应该收集那些信息和数据;模型 的建立和确认专门是考虑是否满足目标的需求。目标需要清楚、明确和切实可行。目标经 常被描述成像这样的问题“通过添加机器或延长工时,能够获得更多的利润吗?”在定义 目标时,详细说明那些将要被用来决定目标是否实现的性能测度是非常必要的。每小时的 产出率、工人利用率、平均排队时间、以及最大队列长度是最常见的系统性能测度。最后,列出仿真结果的先决条件。如,必须通过利用现有设备来实现目标,或最高投资额要在限度内,或产品订货提前期不能延长等。 3.描述系统和列出假设 简单点说,仿真模型降低完成工作的时间。系统中的时间被划分成处理时间、运输时间和排队时间。不论模型是一个物流系统、制造工厂、或服务机构,清楚明了的定义如下建模要素都是非常必要的:资源、流动项目(产品、顾客或信息)、路精、项目运输、流程控制、
机器人系统常用仿真软件介绍概要
1 主要介绍以下七种仿真平台 (侧重移动机器人仿真而非机械臂等工业机器人仿真 : 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim 是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人, 可以被用于研究和教学, 除此之外, USARSim 是 RoboCup 救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎 ODE(Open Dynamics Engine,支持三维的渲染和物理模拟,较高可配置性和可扩展性,与 Player 兼容,采用分层控制系统, 开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用 UDP 协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费 GPL 条款, 多平台支持可以安装并运行在Linux 、 Windows 和 MacOS 操作系统上。 1.2 Simbad Simbad 是基于 Java3D 的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器, 可定制环境和自定义配置传感器模块等功能, 采用 3D 虚拟传感技术, 支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于 GNU 协议,不支持物理计算,可以运行在任何支持包含 Java3D 库的 Java 客户端系统上。 1.3 Webots Webots 是一个具备建模、编程和仿真移动机器人开发平台, 主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人, 可以自定义环境大小, 环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用 ODE 检测物体碰撞和模拟刚性结构的动力学特性, 可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可
eM-Plant生产系统仿真软件功能介绍
eM-Plant 生产系统仿真软件功能介绍eM-Plant是用C++实现的关于生产、物流和工程的仿真软件。它是面向对象的、图形化的、集成的建模、仿真工具,系统结构和实施都满足面向对象的要求。 e M-Plant可以对各种规模的工厂和生产线,包括大规模的跨国企业,建模、仿真和优化生产系统,分析和优化生产布局、资源利用率、产能和效率、物流和供需链,以便于承接不同大小的订单与混和产品的生产。它使用面向对象的技术和可以自定义的目标库来创建具有良好结构的层次化仿真模型,这种模型包括供应链、生产资源、控制策略、生产过程、商务过程。用户通过扩展的分析工具、统计数据和图表来评估不同的解决方案并在生产计划的早期阶段做出迅速而可 靠的决策。 用e M-Plant可以为生产设备、生产线、生产过程建立结构层次清晰的模型。这种模型的建立过程,使用了应用目标库(Application Object Libraries)的组件,而应用目标库(Application Object Libraries)是专门用于各种专业过程如总装、白车身、喷漆等等。用户可以从预定义好的资源、订单目录、操作计划、控制规则中进行选择。通过向库中加入自己的对象(object)来扩展系统库,用户可以获取被实践证实的工程经验用于进一步的仿真研究。 使用e M-Plant仿真工具可以优化产量、缓解瓶颈、减少在加工零件。
考虑到内部和外部供应链、生产资源、商业运作过程,用户可以通过仿真模型分析不同变型产品的影响。用户可以评估不同的生产线的生产控制策略并验证主生产线和从生产线(sub-lines)的同步。 e M-Plant能够定义各种物料流的规则并检查这些规则对生产线性能的影响。从系统库中挑选出来的控制规则(control rules)可以被进一步的细化以便应用于更复杂的控制模型。 用户使用e M-Plant试验管理器(Experiment Manager)可以定义试验,设置仿真运行的次数和时间,也可以在一次仿真中执行多次试验。用户可以结合数据文件,例如Excel格式的文件来配置仿真试验。 使用e M-Plant可以自动为复杂的生产线找到并评估优化的解决方案。在考虑到诸如产量、在制品(inventory)、资源利用率、交货日期(delivery dates)等多方面的限制条件的时候,采用遗传算法(genetic algorithms)来优化系统参数。通过仿真手段来进一步评估这些解决方案,按照生产线的平衡和各种不同批量,交互地找到优化的解决方案 使用e M-Plant分析工具可以轻松的解释仿真结果。统计分析、图、表可以显示缓存区、设备、劳动力(personnel)的利用率。用户可以创建广泛的统计数据和图表来支持对生产线工作负荷、设备故障、空闲与维修时间、专用的关键性能等参数的动态分析;由e M-Plant可以生成生产计划的Gantt图并能被交互地修改。 1.eM-Plant的主要技术特点有: 。面向对象的技术; 。建模和仿真的图形化和集成的用户环境; 。层次结构化; 。继承性; 。对象概念; 。程序驱动的建模; 。模型的可变性和可维护性; 。接口与集成; 。下面对上述的特点进行简单解释 图形的和原型化的集成用户环境 使用传统的仿真软件,用户需要首先建立一个完整的模型,然后运行仿真,最后用产生的仿真文件来描述过程。用户在仿真过程中不能改变仿真模型,即使在该阶段的错误能够很容易地确定。在eM-Plant的集成的和图形化的用户环境下,关于模型的所有功能和信息在任何时候都是图形化的表示,能够进入。因此,即使没有启动仿真,在建模、测试阶段,也能够对模型的部分进行仿真和动画显示,同时,在仿真过程中,关于模型的所有接口都是有效的,用户可以随时修改模型参数和属性。它对于模块化和结构化的程序非常有用,可以为用户带来下列好处: 不需要花费大量时间进行预定义; 可以对程序进行有效的跟踪;
仿真学科与系统仿真综述
仿真学科与系统仿真综述 一.前言 系统仿真以建模与仿真理论为基础,以计算机系统、物理效应设备及仿真器为工具,根据研目标建立并运行模型对研究对象进行认识与改造,是工业化社会向信息化社会前进中产生的信息类科学技术。它是一门以建模理论、计算方法、评估理论为基本理论,以计算机技术、网络技术、图形图像技术、多媒体技术、软件工程、信息处理、自动控制及系统工程等相关技术为支撑的综合性交叉科学。 系统仿真通过构造既能反映系统特征又能符合系统研究要求的模型,并在该模型上进行所关心的问题研究揭示已有系统和未来系统的内在特性、运行规律、分系统之间的关系并预测未来。仿真极大地扩展了人类认知世界的能力,可以不受时空限制,观察和研究已发生或尚未发生的现象,以及在各种假想条件下这些现象发生和发展的过程。它可以帮助人们深入一般科学及人类生理活动难以到达的宏观或微观世界去进行研究和探索,从而为人类认识世界和改造世界提供了全新的方法和手段。系统仿真方法、技术及其应用已扩展到人类活动的大部分领域。 近年来,系统仿真技术方法、技术及其应用研究吸引了越来越多的国内外学者的关注,研究内容也越来越广泛,应用覆盖了工程、社会、管理、军事等领域,逐渐形成了多学科交叉融合的研究趋势。 二.仿真学科概念 1.仿真的定义 在1982年中文版中“仿真”的定义如下:“仿真(Simulation)是指研制和使用计算机模型,用以研究实际或假设的动态系统”。上述定义强调了建模、计算机、动态系统三个重要的组成部份,在定义描述中还强调了计算模型的支配地位。1978年,中国成立大百科全书“仿真”的定义如下:“仿真:利用复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或在设计中的系统”。上述定义强调了系统、模型和实验。强调了模型的广义性和实验的复杂性。在定义描述中认为计算机模型是仿真系统中重要的模型之一。 两种定义,在技术内涵上大同小异,但侧重点有区别,前者强调现代建模与仿真技术的特殊性,即认为计算机模型在仿真中占支配地位。后者虽也承认计算机模型在仿真中的重要性,但更强调仿真模型的广议性及仿真实验的复杂性。[10] 从普遍意义来看, 仿真的研究对象是系统, 系统是由相互联系、相互制约、相互依存的若干组成部分( 要素) 结合在一起的具有特定功能和运动规律的有机整体。构成系统的各组成部分可称为子系统或分系统, 而系统本身又可看作它所从属的那个更大的系统的组成部分。
几种常用电力系统仿真软件的比较分析
几种常用电力系统仿真软件的比较分析 电力系统仿真软件的分类较为复杂,按照不同标准可分为:实时与非实时,短时与长时间等不同种类,而各个仿真软件在功能上都具有综合性,只是侧重点有所不同,在报告的最后有各类仿真软件功能的比较,以下为较著名的仿真软件的介绍。 1 RTDS RTDS由加拿大RTDS公司出品,一个CPU模拟一个电力系统元器件,CPU间的通讯,采用并行-串行-并行的方式。RTDS具有仿真的实时性,主要用于电磁暂态仿真。目前RTDS应用规模最大的是韩国电力公司(KEPCO)的装置, 有26个RACK,可以模拟400多个三相结点。RTDS仿真的规模受到用户所购买设备(RACK)数的限制。这种开发模式不利于硬件的升级换代,与其它全数字实时仿真装置相比可扩展性较差。由于每个RACK的造价很高, 超过30万美元, 因此仿真规模一般不大。基于上述原因,RTDS目前主要用于继电保护试验和小系统实时仿真。 2 EMTDC/PSCAD EMTDC是一种世界各国广泛使用的电力系统仿真软件, PSCAD是其用户界面,一般直接将其称为PSCAD。使得用户能更方便地使用EMTDC进行电力系统分析,使电力系统复杂部分可视化成为可能。PSCAD/EMTDC基于dommel电磁暂态计算理论,适用于电力系统电磁暂态仿真。EMTDC(Electro Magnetic Transient in DC System)即
可以研究交直流电力系统问题,又能完成电力电子仿真及其非线性控制的多功能工具。
PSCAD由Manitoba HVDC research center开发。 3 PSASP PSASP由中国电力科学研究院开发。PSASP的功能主要有稳态分析、故障分析和机电暂态分析。稳态分析包括潮流分析、网损分析、最优潮流和无功优化、静态安全分析、谐波分析和静态等值等。 故障分析包括短路计算、复杂故障计算及继电保护整定计算。机电暂态分析包括暂态稳定计算、电压稳定计算、控制参数优化等。 4 ARENE 法国电力公司(EDF)开发的全数字仿真系统ARENE, 有实时仿真和非实时仿真版本。实时版本有: (1)RTP版本,硬件为HP公司基于HP-CONVE工作站的多CPU 并行处理计算机,该并行处理计算机的最大CPU数量已达32个,可以用于较大规模系统电磁暂态实时仿真; (2)URT版本,HP-Unix工作站,用于中小规模系统电磁暂态实时仿真; (3)PCRT版本,PC-Linux工作站,用于中小规模系统电磁暂态实时仿真。 ARENE实时仿真器可以进行如下物理装置测试:继电保护,自动装置,HVDC和FACTS控制器,可以用50微秒步长进行闭环电磁暂态实时仿真。ARENE不作机电暂态仿真。采用基于HP工作站的并行处理计算机,其软硬件扩展也受到计算机型号的制约。