平面连杆机构课堂测试题

《平面连杆机构》课堂测试题
班级:姓名:成绩:
一、填空题
1.平面连杆机构由一些刚性构件用____副和____副相互联接而组成。
2. 在铰链四杆机构中,能作整周连续旋转的构件称为_______,只能来回摇摆某一角度的构件称为_______,直接与连架杆相联接,借以传动和动力的构件称为_______。
3. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用符号和式子表明它构成曲柄摇杆机构的条件:
(1)____________________________。
(2)以_______为机架,则_______为曲柄。
4. 设图1-1已构成曲柄摇杆机构。当摇杆CD为主动件,机构处于BC与从动曲柄AB共线的两个极限位置,称为机构的两个_______位置。
5. 铰链四杆机构的三种基本形式是_______机构,_______机构,_______机构。
6. 平面连杆机急回运动特性可用以缩短_______。从而提高工作效率。
7. 平面连杆机构的急回特性系数K______________。
8. 四杆机构中若对杆两两平行且相等,则构成_______机构。
二、选择代号填空题
9. 平面四杆机构中各构件以_______相联接。
(a 转动副 b 移动副 c 螺旋副)
10. 平面连杆机构当急回特性系数K_______时,机构就具有急回特性。
(a >1 b =1 c <1)
11. 铰链四杆机构中,若最长杆与最短杆之和大雨其他两杆之和,则机构有_______。(a 一个曲柄 b 两个曲柄 c两个摇杆)
12. 家用缝纫机踏板机构属于_______。
(a 曲柄摇杆机构 b 双曲柄机构 c 双摇杆机构)
13. 机械工程中常利用_______的惯性储能来越过平面连杆机构的“死点”位置。
(a主动构件 b 从动构件 c 联接构件)
14. 对心曲柄滑块机构曲柄r与滑块行程H的关系是_______。
(a .H=r b. H=2r c. H=3r)
15. 内燃机中的曲柄滑块机构工作时是以_______为主动件。
(a 曲柄,b 连杆,连杆, c 滑块)
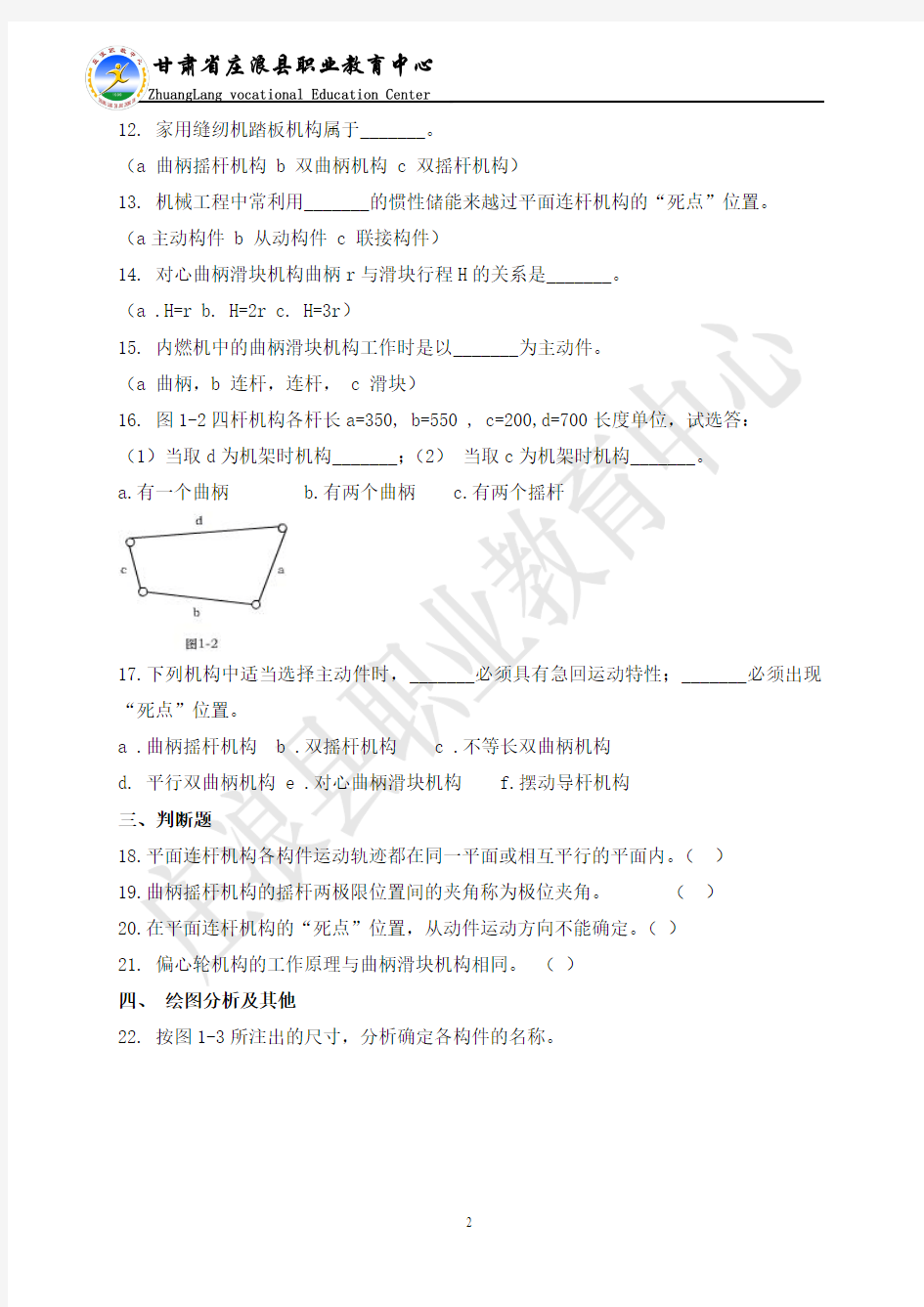
16. 图1-2四杆机构各杆长a=350, b=550 , c=200,d=700长度单位,试选答:
(1)当取d为机架时机构_______;(2)当取c为机架时机构_______。
a.有一个曲柄
b.有两个曲柄
c.有两个摇杆
17.下列机构中适当选择主动件时,_______必须具有急回运动特性;_______必须出现“死点”位置。
a .曲柄摇杆机构
b .双摇杆机构
c .不等长双曲柄机构
d. 平行双曲柄机构 e .对心曲柄滑块机构 f.摆动导杆机构
三、判断题
18.平面连杆机构各构件运动轨迹都在同一平面或相互平行的平面内。()
19.曲柄摇杆机构的摇杆两极限位置间的夹角称为极位夹角。()
20.在平面连杆机构的“死点”位置,从动件运动方向不能确定。()
21. 偏心轮机构的工作原理与曲柄滑块机构相同。()
四、绘图分析及其他
22. 按图1-3所注出的尺寸,分析确定各构件的名称。
23. 图1-4AB杆作匀速圆周运动,转向如图示。试解答:
(1)用作图法找出滑块E的两个极限位置。
(2)由作图判断滑块是否存在急回运动?急回方向向何方?1)若机构以滑块为主动,指出曲柄AB的两个“死点“位置。2)该机构由哪些基本机构联合组成?3)滑块与导槽属于什么运动副联接?
24. 设如1-1机构以d杆为机架,a杆逆时针旋转。作图找出机构两个极限位置,标出摆角Ψ。极位夹角θ和c杆的急回运动方向。
25. 作图找出1-5机构的极位夹角θ和从动件的急回运动方向,并回答:机构名称是_______。构件名称r是_______;l是_______;c是_______。
图1-5
26.作图找出图1-6机构构件C的两个极限位置。若机构改为构件C主动,标写构件AB 的两个“死点”位置。回答问题:机构名称。机构名称r是_______;b是_______;C
是_______;A、B两处的运动副是_______;C与机座处运动副是_______。
27. 按图1-7回答问题:机构名称是_______,构件名称是a是_______;b是_______;c是_______;d是_______。当取c杆为机架时的机构名称是_______。
28. 图1-8a,b同是剪板机,试分别画出二者的机构简图,并回答问题:
a图为_______机构。构件名称:AB是_______;BC是_______;CD是_______;AD是_______。b图为_______机构。构件名称:AB是_______;BC是_______;CD是_______;AD是_______。
29. 图1-9a,b同是翻斗车试分析它们各由什么机构组成并画出机构简图。
五、连杆机构基本性质的问题
30.图示为一铰链四杆机构,已知各杆长度:L AB =10cm ,L BC =25cm,L CD =20cm,L AD =30cm 。当分别固定构件1、2、3、4机架时,它们各属于哪一类机构?
31.在图示铰链四杆机构中,已知l BC =50cm,l CD =35cm,l AD =30cm,AD 为机架。试问:
(1) 若此机构为曲摇杆机构,且AB 为曲柄,求l AB 的最大值;(2) 若此机构为双柄
机构,求l AB 最大值;
(3) 若此机构为双摇杆机构,求l AB 的数值。
平面连杆机构及其设计答案复习进程
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
平面连杆机构习题及答案.docx
平面连杆机构 一、填空: 1. 由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2 .铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件 称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与 连架杆相联接,传递运动和动力的构件称为连杆。 4. 铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)a+b≤c+d 。 (2)以__b或d__为机架,贝U __a__为曲柄。 图1-1 6. 在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7 .如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9. 机构中传动角丫和压力角α之和等于90°。 10. 通常压力角α是指力F与C点的绝对速度V C之间间所夹锐角
二、选择题: 1 ?在曲柄摇杆机构中,只有当C?摇杆为主动件时,才会出现“死点” 位 置。 A.连杆 B.机架 C.摇杆 D ?曲柄 2. 绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机 构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C.有时有曲柄,有时没曲柄 D.以上答案均不对 3. 当急回特性系数为 C. K > 1 时,曲柄摇杆机构才有急回运动。 A. K V1 B. K = 1 C. K > 1 D. K = 0 4. 当曲柄的极位夹角为 D. θ> 0 时,曲柄摇杆机构才有急回运动。 A. θ V 0 B. θ=O C. θ≤ 0 D. θ > 0 5. 当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C. 不确定的 D. 以上答案均不对 6. 曲柄滑决机构是由 A.曲柄摇杆机构演化而来的。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D.以上 答案均不对 7. 平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之 和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C. 双摇杆机构 D.以上 答案均不对 8. 平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。
平面连杆机构 试题
第二章 平面连杆机构 一、判断题(正确 T ,错误 F) 1. 任何平面四杆机构出现死点时对工作都是不利的,因此应设法避免。 ( ) 2. 铰链四杆机构存在曲柄的条件是最短杆与最长杆之和大于或等于其余两杆长度之和。( ) 3. 低副联接的三个构件不能组成机构,只能构成一个构件。 ( ) 4. 机构处于死点位置时,机构中的从动件将出现自锁或运动不确定现象。 ( ) 5. 极位夹角是从动件在两个极限位置时的夹角。 ( ) 6. 在铰链四杆机构中,通过取不同构件作为机架,则可以分别得到曲柄摇杆机构、双曲柄机构和双摇杆机构。( ) 7. 平面四杆机构中,压力角越小,传动角越大,机构的传动性能越好,效率越高。 ( ) 二、单项选择题 1. 在下列平面四杆机构中,无论以哪一构件为主动件,都不存在死点位置( )。 A 曲柄摇杆机构 B 双摇杆机构 C 双曲柄机构 D 曲柄滑块机构 2. 为使机构顺利通过死点,常采用在高速轴上装( )增大惯性。 A 齿轮 B 飞轮 C 凸轮 D 蜗轮 3. 当曲柄为主动件时,曲柄摇杆机构的最小传动角min γ总是出现在( )。 A 连杆与曲柄成一条线时 B 连杆与机架成一条线时; C 曲柄与机架成一条线时 D 曲柄、连杆与机架成一条线时。 4. 无急回特性的平面四杆机构,其极位夹角为( )。 A ?<0θ B ?=0θ C ?≥0θ D ?>0θ 5. 一曲柄摇杆机构,若改为以曲柄为机架,则将演化为( ) A 曲柄摇杆机构 B 双曲柄机构 C 双摇杆机构 D 导杆机构 6. 铰链四杆机构ABCD 中,AB 为曲柄,C D为摇杆,BC 为连杆。若杆长l AB =30mm ,l BC=70mm ,l CD =80mm,则机架最大杆长为( ) A 80mm B 100mm C 120mm D 150mm 7. 在下列平面四杆机构中,一定无急回特性的机构是( ) A 曲柄摇杆机构 B 摆动导杆机构 C 对心曲柄滑块机构 D 偏置曲柄滑块机构 三、填空题 1. 在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的运动特性称为。 2.当压力角α大到某一数值时,不论推力为多大,都不能使从动件运动,凸轮机构将发生。 3. 平面四杆机构中,已知行程速比系数为K ,则极位夹角的计算公式为。 四、简答题 1. 何为平面连杆机构?平面四杆机构具有哪些基本特征? 2. 铰链四杆机构存在曲柄的必要条件是什么?铰链四杆机构有哪几种形式,如何判断? 3. 根据图中所注尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构、还是双摇杆机构,并说明为 什么。
第三章 平面连杆机构及其设计习题解答
1 图11所示铰链四杆机构中,已知各杆长度AB l =42mm ,BC l =78mm ,CD l =75mm ,AD l =108mm 。要求 (1) 试确定该机构为何种机构; (2) 若以构件AB 为原动件,试用作图法求出摇杆CD 的最大摆角?, 此机构的极位夹角θ,并确定行程速比系数K (3) 若以构件AB 为原动件,试用作图法求出该机构的最小传动角 min γ; (4) 试分析此机构有无死点位置。 图11 【分析】(1)是一道根据机构中给定的各杆长度(或尺寸范围)来确定属于何种铰链四杆机构问题;(2)(3)(4)是根据机构中给定的各杆长度判定机构有无急回特性和死点位置,确定行程速比系数K 和最小传动角问题。 解: (1)由已知条件知最短杆为AB 连架杆,最长杆为AD 杆,因 mm l l mm l l CD BC AD AB 153757815010842=+=+<=+=+ 故AB 杆为曲柄,此机构为曲柄摇杆机构。 (2)当原动件曲柄AB 与连杆BC 两次共线时,摇杆CD 处于两极限位置。 适当选取长度比例尺l μ,作出摇杆CD 处于两极限位置时的机构位置图AB 1C 1D 和AB 2C 2D ,由图中量得?=70°,θ=16°,可求得 19.1180180≈+?-?= K θ θ (3) 当原动件曲柄AB 与机架AD 两次共线时,是最小传动角min γ可能出现的位置。用作图法作出机构的这两个位置AB ′C ′ D 和AB ″C ″ D ,由图中量得,50,27?=''?='γγ故 min γ=?='27γ (4) 若以曲柄AB 为原动件,机构不存在连杆BC 与从动件CD 共线的两个位置,即不存在?='0γ的位置,故机构无死点位置;若以摇杆CD 为原动件,机构存在连杆BC 与从动件AB 共线的两个位置,即存在?='0γ的位置,故机构存在两个死点位置。 【评注】 四杆机构基本知识方面的几个概念(如有曲柄条件、急回运动、传动角等)必须清晰。机构急回运动分析的关键是确定极位夹角θ的大小,本题曲柄合理转向的确定依据就是机构存在慢进快退的急回特性;而传动角和死点的分析要特别注意它与机构原动件有关。 2 如图12所示,连杆BC 的长度BC l 及其两个位置11C B 、22C B 为已知,试设计一铰链四杆机构ABCD ,使得AB 杆为原 动件时,机构在此位置时的传动角相等,并满足机架AD 的长度为AD l 。
平面连杆机构习题及标准答案
平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对
平面连杆机构基础习题及答案
平面连杆机构 一、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 7、双曲柄机构是怎样形成的? 8、双摇杆机构是怎样形成的? 9、述说曲柄滑块机构的演化与由来。 10、导杆机构是怎样演化来的? 11、曲柄滑块机构中,滑块的移动距离根据什么计算? 12、写出曲柄摇杆机构中,摇杆急回特性系数的计算式? 13、曲柄摇杆机构中,摇杆为什么会产生急回运动? 14、已知急回特性系数,如何求得曲柄的极位夹角? 15、平面连杆机构中,哪些机构在什么情况下才能出现急回运动? 16、平面连杆机构中,哪些机构在什么情况下出现“死点”位置? 17、曲柄摇杆机构有什么运动特点? 18、试述克服平面连杆机构“死点”位置的方法。 19、在什么情况下曲柄滑块机构才会有急回运动? 20、曲柄滑块机构都有什么特点? 21、试述摆动导杆机构的运动特点? 22、试述转动导杆机构的运动特点。 23、曲柄滑块机构与导杆机构,在构成上有何异同? 二、填空题 1、平面连杆机构是由一些刚性构件用副和副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的运动。 3、当平面四杆机构中的运动副都是副时,就称之为铰链四杆机构;它是其他多杆机构的。
4、在铰链四杆机构中,能绕机架上的铰链作整周的叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作的叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是,另一个是,也可以两个都是或都是。 7、平面四杆机构有三种基本形式,即机构,机构和机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和或其他两杆的长度之和;最短杆的相邻构件为,则最短杆为。 9、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。 10、在机构中,如果将杆对面的杆作为机架时,则与此相连的两杆均为摇杆,即是双摇杆机构。 11、在机构中,最短杆与最长杆的长度之和其余两杆的长度之和时,则不论取哪个杆作为,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 14、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。 15、曲柄摇杆机构产生“死点”位置的条件是:摇杆为件,曲柄为件或者是把运动转换成运动。 16、曲柄摇杆机构出现急回运动特性的条件是:摇杆为件,曲柄为件或者是把` 运动转换成。 17、曲柄摇杆机构的不等于00,则急回特性系数就,机构就具有急回特性。 18、实际中的各种形式的四杆机构,都可看成是由改变某些构件的,或选择不同构件作为等方法所得到的铰链四杆机构的演化形式。 19、若以曲柄滑块机构的曲柄为主动件时,可以把曲柄的运动转换成滑块的运动。 20、若以曲柄滑块机构的滑块为主动件时,在运动过程中有“死点”位置。 21、通常利用机构中构件运动时的惯性,或依靠增设在曲柄上的惯性来渡过“死点”位置。 22、连杆机构的“死点”位置,将使机构在传动中出现或发生运动方向等现象。 23、飞轮的作用是可以,使运转。 24、在实际生产中,常常利用急回运动这个特性,来缩短时间,从而提高。
平面连杆机构练习题
平面连杆机构1 一、单项选择题 1、具有急回特性的四杆机构,其行程速度变化系数K的值(C )。 A. 1 = > D. 1 ≤ B. 1 < C. 1 2、在曲柄摇杆机构中,当摇杆为从动件时,最小传动角出现在(B)共线的位置。 A. 曲柄与连杆 B. 曲柄与机架 C. 摇杆与机架 D. 摇杆与连杆 3、铰链四杆机构有整转副的条件是:最短杆与最长杆长度之和(C)其余两杆长度之和。 A. < B. = C. ≤ D. ≥ 4、四杆机构的急回特性是针对主动件作(A)而言的。 A. 等速转动 B. 等速移动 C. 变速转动 D. 变速移动 5、对心曲柄滑块机构以滑块为从动件时,其最小传动角γ min出现在曲柄(A)的位置。 A. 垂直于滑块导路 B. 垂直于连杆 C. 与连杆共线 D. 与机架共线 6、如果铰链四杆机构中的最短杆与最长杆长度之和(A)其余两杆长度之和,则该 机构中不存在整转副。 A. > B. ≥ C. < D. ≤ 7、四杆机构的急回特性是针对从动件作(D)而言的。 A. 等速转动 B. 等速移动 C. 变速转动 D.往复运动 8、对心曲柄滑块机构以滑块为从动件时,其最大传动角γ max为(C)。 A. ? 90 D. ? <90 45 C. ? 30 B. ? 9、对于双摇杆机构,最短构件与最长构件长度之和(B)大于其它两构件长度之和。 A. 一定 B. 不一定 C. 一定不 D. 在最短构件为机架 10、对于曲柄滑块机构,当曲柄作等速转动时,从动件滑块(B)具有急回特性。 A. 一定 B. 不一定 C. 一定不 D. 在极限位置 11、当连杆机构位置一定时,取不同构件为原动件,机构压力角的数值(B)。 A. 相同 B. 不同 C. 与原动件转向有关 D. 与原动件转速大小有关 12、铰链四杆机构中若最短杆与最长杆长度之和大于其他两杆长度之和,则机构中(C)。 A. 一定有曲柄存在 B. 是否有曲柄存在取决于机架是否为最短构件 C. 一定无曲柄存在 D. 是否有曲柄存在取决于机架是否为最长构件 二、填空题 1、平面连杆机构是若干构件用低副连接组成的平面机构。 α时,该机构处于死点位置。 2、当四杆机构的压力角? =90
平面连杆机构及其设计(参考答案)
填空题: 1 ?平面连杆机构是由一些刚性构件用低副连接组成的。 2 ?由四个构件通过低副联接而成的机构成为四杆机构。 3 ?在铰链四杆机构中,运动副全部是转动副。 4 .在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5 ?在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6 ?在铰链四杆机构中,与连架杆相连的构件称为连杆。 7 ?某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8 ?对心曲柄滑快机构无急回特性。9 ?偏置曲柄滑快机构有急回特性。 10 ?对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于 _ 。12 .机构的压力角越小对传动越有利。 13 ?曲柄滑快机构,当取滑块为原动件时,可能有死点。 14 ?机构处在死点时,其压力角等于9 0 0 。 15 .平面连杆机构,至少需要4个构件。 二、判断题: 1. 平面连杆机构中,至少有一个连杆。(V) 2 .平面连杆机构中,最少需要三个构件。(X ) 3?平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(V) 4.平面连杆机构中,极位夹角B越大,K值越大,急回运动的性质也越显著。(V) 5 .有死点的机构不能产生运动。(X ) 6.机构的压力角越大,传力越费劲,传动效率越低。(V) 7?曲柄摇杆机构中,曲柄为最短杆。(V) 8.双曲柄机构中,曲柄一定是最短杆。(X ) 9?平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(V) 10 ?平面连杆机构中,压力角的余角称为传动角。(V) 11 .机构运转时,压力角是变化的。(V) 三、选择题: 1 .铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和A其他两杆之和。 A <=; B >= ; C > o 2 .铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分 条件是取A____ 为机架。A最短杆或最短杆相邻边;B最长杆;C最短杆的对边。 3 .铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 个曲柄。A最短杆相邻边;B最短杆;C最短杆对边。 4 ?铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以A为机架时,有 一个曲柄。A最短杆相邻边;B最短杆;C最短杆对边。 5?铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时,无 曲柄。A最短杆相邻边;B最短杆;C最短杆对边。 6.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆机构。
平面机构的运动分析习题和答案
2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。
9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( )
机械设计基础.平面连杆机构复习题与解答
平面连杆机构习题及解答 一、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 7、双曲柄机构是怎样形成的? 8、双摇杆机构是怎样形成的? 9、述说曲柄滑块机构的演化与由来。 10、导杆机构是怎样演化来的? 11、曲柄滑块机构中,滑块的移动距离根据什么计算? 12、写出曲柄摇杆机构中,摇杆急回特性系数的计算式? 13、曲柄摇杆机构中,摇杆为什么会产生急回运动? 14、已知急回特性系数,如何求得曲柄的极位夹角? 15、平面连杆机构中,哪些机构在什么情况下才能出现急回运动? 16、平面连杆机构中,哪些机构在什么情况下出现“死点”位置? 17、曲柄摇杆机构有什么运动特点? 18、试述克服平面连杆机构“死点”位置的方法。 19、在什么情况下曲柄滑块机构才会有急回运动? 20、曲柄滑块机构都有什么特点? 21、试述摆动导杆机构的运动特点? 22、试述转动导杆机构的运动特点。 23、曲柄滑块机构与导杆机构,在构成上有何异同? 二、填空题 1、平面连杆机构是由一些刚性构件用副和副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的运动。 3、当平面四杆机构中的运动副都是副时,就称之为铰链四杆机构;它是其他多杆机构的。
4、在铰链四杆机构中,能绕机架上的铰链作整周的叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作的叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是,另一个是,也可以 两个都是或都是。 7、平面四杆机构有三种基本形式,即机构,机构和机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和或其 他两杆的长度之和;最短杆的相邻构件为,则最短杆为。 9、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。 10、在机构中,如果将杆对面的杆作为机架时,则与此相连的两杆 均为摇杆,即是双摇杆机构。 11、在机构中,最短杆与最长杆的长度之和其余两杆的长度之和时, 则不论取哪个杆作为,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 14、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。 15、曲柄摇杆机构产生“死点”位置的条件是:摇杆为件,曲柄为件 或者是把运动转换成运动。 16、曲柄摇杆机构出现急回运动特性的条件是:摇杆为件,曲柄为件 或者是把` 运动转换成。 17、曲柄摇杆机构的不等于00,则急回特性系数就,机构就具有急回 特性。 18、实际中的各种形式的四杆机构,都可看成是由改变某些构件的,或 选择不同构件作为等方法所得到的铰链四杆机构的演化形式。 19、若以曲柄滑块机构的曲柄为主动件时,可以把曲柄的运动转换成滑块的 运动。 20、若以曲柄滑块机构的滑块为主动件时,在运动过程中有“死点”位置。 21、通常利用机构中构件运动时的惯性,或依靠增设在曲柄上的 惯性来渡过“死点”位置。 22、连杆机构的“死点”位置,将使机构在传动中出现或发生运动方向等 现象。 23、飞轮的作用是可以,使运转。 24、在实际生产中,常常利用急回运动这个特性,来缩短时间,从而提 高。 25、机构从动件所受力方向与该力作用点速度方向所夹的锐角,称为角,用它
平面连杆机构习题及答案知识讲解
平面连杆机构习题及 答案
平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短 杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得曲柄摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对
机械原理平面连杆机构及其设计课后习题答案.
题3-3: 解:1)当AB为最短构件,满足题意。∴l AB+l BC≤l CD﹢l AD,则l AB﹢50≤35+30 ∴l AB≤15 ∴l AB的最大值为15㎜。 2)a: 当AB为最长构件,则有:l AD+ l AB≤l BC+ l CD AB≤55 l AB>l BC AB>50 ∴50<l AB≤55
b:当AB 既不是最长构件也不是最短构件,则有: l AD +l BC ≤l AB + l CD l AB ≥45 l AB >l AD l AB >30 ∴l AB ≥45 ∴综上所述,45㎜≦l AB ≤55㎜。 3)分析题意得:当该机构的四个构件的长度不满足杆长之和条件时符合题意。所以: (a)当AB 杆为最短构件时,则有: l AB +l BC ≧l CD ﹢l AD l AB ≥15 l AB <l AD l AB <30 ∴15≤l AB <30 (b )当A 杆为最长构件时,则有:
l AD+ l AB l BC+ l CD l AB≥55 l AB>l BC l AB>50 l AB<l BC+l CD+ l AD l AB<115 ∴55<l AB<115 (c)当AB不是最长杆,也不是最短杆时,则有: 30<l AB<50 l AD<l AB<l BC30<l AB<50 l AD+l BC>l AB+ l CD l AB<45 l AB+ l CD+ l AD>l BC l AB>-15 (舍)∴综合上述情况,则有:AB杆的范围为15㎜<l AB<45㎜或者55㎜<l AB<115㎜时,此铰链四杆为双摇杆机构。
题3-4 ∵K=1.5 ∴θ=36°根据已知条件按1:1绘出上图,则有: (1) l AB+l BC=70.84 l BC-l AB =25.82 l AB=22.51㎜, l BC=48.33㎜机构简图见图(1):
平面连杆机构及其设计(参考答案)
一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两
平面连杆机构练习题
平面连杆机构 一. 填空 1.平面连杆机构由一些刚性构件用____副和____副相互联接而组成。 2. 在铰链四杆机构中,能作整周连续旋转的构件称为_______,只能来回摇摆某一角度的构件称为_______,直接与连架杆相联接,借以传动和动力的构件称为_______。 3. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用符号和式子表明它构成曲柄摇杆机构的条件: (1)____________________________。 (2)以_______为机架,则_______为曲柄。 4. 设图1-1已构成曲柄摇杆机构。当摇杆CD为主动件,机构处于BC与从动曲柄AB共线的两个极限位置,称为机构的两个_______位置。 5. 铰链四杆机构的三种基本形式是_______机构,_______机构,_______机构。 6. 平面连杆机急回运动特性可用以缩短_______。从而提高工作效率。 7. 平面连杆机构的急回特性系数K______________。 8. 四杆机构中若对杆两两平行且相等,则构成_______机构。 二、选择代号填空 9. 平面四杆机构中各构件以_______相联接。 (a 转动副 b 移动副 c 螺旋副) 10. 平面连杆机构当急回特性系数K_______时,机构就具有急回特性。
(a >1 b =1 c <1) 11. 铰链四杆机构中,若最长杆与最短杆之和大雨其他两杆之和,则机构有_______。 (a 一个曲柄 b 两个曲柄 c两个摇杆) 12. 家用缝纫机踏板机构属于_______。 (a 曲柄摇杆机构 b 双曲柄机构 c 双摇杆机构) 13. 机械工程中常利用_______的惯性储能来越过平面连杆机构的“死点”位置。 (a主动构件 b 从动构件 c 联接构件) 14. 对心曲柄滑块机构曲柄r与滑块行程H的关系是_______。 (a .H=r b. H=2r c. H=3r) 15. 内燃机中的曲柄滑块机构工作时是以_______为主动件。 (a 曲柄,b 连杆,连杆, c 滑块) 16. 图1-2四杆机构各杆长a=350, b=550 , c=200,d=700长度单位,试选答:(1)当取d为机架时机构_______;(2)当取c为机架时机构_______。 a.有一个曲柄 b.有两个曲柄 c.有两个摇杆 17.下列机构中适当选择主动件时,_______必须具有急回运动特性;_______必须出现“死点”位置。 a 曲柄摇杆机构 b 双摇杆机构 c 不等长双曲柄机构 d 平行双曲柄机构 e 对心曲柄滑块机构 d 摆动导杆机构 三、判断 18.平面连杆机构各构件运动轨迹都在同一平面或相互平行的平面内。()
平面连杆机构习题及解答
平面连杆机构习题及解答 、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 18、试述克服平面连杆机构“死点”位置的方法。 二、填空题 1、平面连杆机构是由一些刚性构件用 ___________ 副和 ________ 副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的 ________ 运动。 3、当平面四杆机构中的运动副都是 _________ 副时,就称之为铰链四杆机构;它是其他 多杆机构的___________ 。 4、在铰链四杆机构中,能绕机架上的铰链作整周 ____________ 的 __________ 叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作 ____________ 的 ________ 叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是 __________ ,另一个是 ________ ,也可以两个都是_________ 或都是________ 。 7、平面四杆机构有三种基本形式,即 ________ 机构,_________ 机构和_________ 机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和_______________ 或________ 其他两杆的长度之和;最短杆的相邻构件为___________ ,则最短杆为___________ 。 9、在曲柄摇杆机构中,如果将 _______ 杆作为机架,则与机架相连的两杆都可以作—_______ 运动,即得到双曲柄机构。 10、在_______ 机构中,如果将__________ 杆对面的杆作为机架时,则与此相连的两杆 均为摇杆,即是双摇杆机构。 11、在_______ 机构中,最短杆与最长杆的长度之和___________ 其余两杆的长度之和时,则不论取哪个杆作为_________ ,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的__________ 长度趋向 ________ 而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的 __________ 而演变来的。 14、将曲柄滑块机构的________ 改作固定机架时,可以得到导杆机构。
机械原理第八章_平面连杆机构及其设计
第八章 平面连杆机构及其设计 题8-1 试画出图示两种机构的机构运动简图,并说明他们各为何种机构。在图a 中偏心盘1绕固定轴O 转动,迫使滑块2在圆盘3的槽中来回滑动,而圆盘3又相对于机架4转动;在图b 中偏心盘1绕固定轴O 转动,通过构件2,使滑块3相对于机架4往复移动。(图a 的机构运动简图可有两种表达方式,绘出其中之一即可) A B (a) O 12 3 4 A B O 123导杆机构 或 O 曲柄摇块机构 题8-1 (b) 题8-2如图所示,设已知四杆机构各构件的长度a=240mm ,b=600mm ,c=400mm ,d=500mm ,试回答下列问题: 1)当取杆4为机架时,是否有曲柄存在?__________若有曲柄,则杆a 为曲柄,此时该机构为__________机构。 2)要使机构成为双曲柄机构,则应取杆_________为机架。
3) 要使此机构成为双摇杆机构,则应取杆_______为机架,且其长度的允许变动范围为_______________. 4) 如将杆4的长度改为d=400mm,而其他各杆的长度不变,则当分别以1、2、3杆为机架时,所获得的机构为___________机构。 解:1)因900500400600240=+=+≤+=+d c b a 且最短杆1为连架杆,故当取杆4为机架时,有曲柄存在。此时该机构为曲柄摇杆机构。 2)要使此机构成为双曲柄机构,则应取最短杆1为机架。 3)要使此机构成为双摇杆机构,则取最杆3为机架,其长度的允许变动范围为: (1)因最短杆1为连杆,即使满足杆长条件,此机构也不能成为双摇杆机构 (2)不满足杆长条件时,b 为最长杆,c 为最短杆,d a c b +>+ 140>c c 为最长杆,但不可能大于三杆长度之和 d b a c ++< 故1340
- 平面连杆机构-习题+答案很全很好哦
- 平面连杆机构大题答案
- 平面连杆机构基础习题及答案
- 平面连杆机构基础习题及答案
- 平面连杆机构大题答案
- 平面连杆机构-作业习题
- 平面连杆机构基础习题与答案
- 机械设计基础习题及答案3平面连杆机构的自由度
- 平面连杆机构习题及解答
- 最新平面连杆机构基础习题及答案
- 平面连杆机构及其设计(参考答案)
- 平面连杆机构大题答案培训讲学
- 平面连杆机构习题及标准答案
- 平面连杆机构习题及答案
- (完整版)平面连杆机构习题及答案
- 平面连杆机构基础习题及答案
- 平面连杆机构基础习题及答案
- 机械设计基础.平面连杆机构习题与解答
- 平面连杆机构习题及答案知识讲解
- 机械原理平面连杆机构及其设计课后习题答案