差分信号之剖析与探讨

Introduction
驱动端发送两个大小相等,方向相反的信号,接收端会有一个相减器,比较这两信号的差值,来判断逻辑位是0或是1,此即所谓的差分讯号[1]。
而下图是实际PCB的差分走线[1]。
Advantage
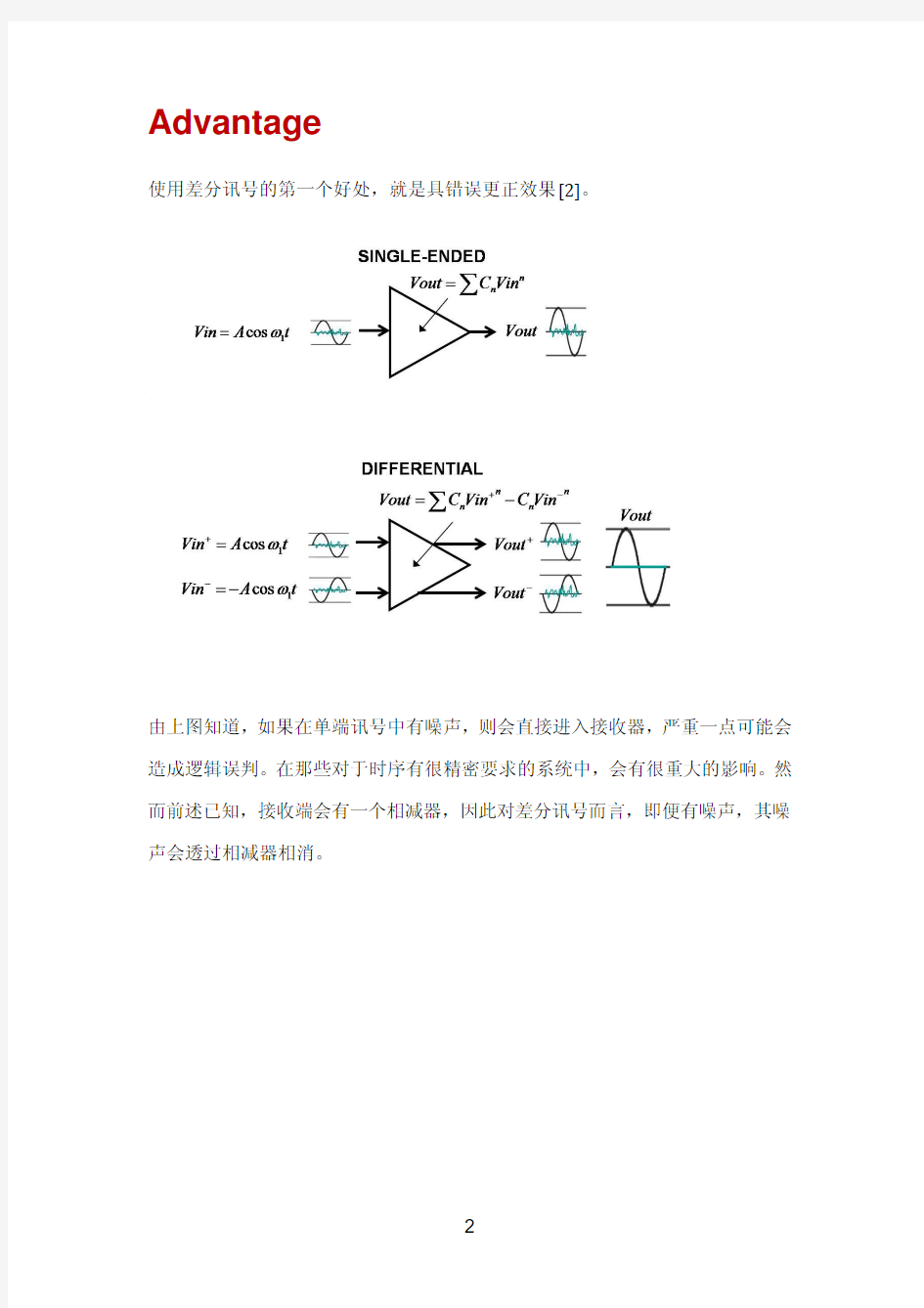
使用差分讯号的第一个好处,就是具错误更正效果[2]。
由上图知道,如果在单端讯号中有噪声,则会直接进入接收器,严重一点可能会造成逻辑误判。在那些对于时序有很精密要求的系统中,会有很重大的影响。然而前述已知,接收端会有一个相减器,因此对差分讯号而言,即便有噪声,其噪声会透过相减器相消。
由于差分信号的逻辑判断,是仰赖两个信号的交点,如下图[4] :
不像单端信号依靠高低两个电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。目前流行的LVDS(low voltage differential signaling)就是采用差分讯号型式[5-6],下图是LVDS Connector的图片[7] :
第二个好处,可以有较小的EMI辐射干扰,由于数字信号在逻辑切换时,会
因电压变换产生电场,进而产生EMI辐射,对邻近走线造成干扰[9,15],如下图[12] :
由于高速数字讯号逻辑切换速度越来越快,而逻辑切换速度越快,则耗电流就越大,同时频率也越高,由[9]可知,EMI辐射强度与电流大小,以及频率成正比,这等同于更进一步加大了EMI辐射干扰。而由[11]可知,电磁波会有磁场与电场成份,这表示若能降低磁场或电场大小,便能减少EMI辐射干扰。
而差分讯号所产生的磁场,会彼此相消,所产生的电场,会因彼此紧密地耦合在一起,进而减少发散向外的机会[8-10]。
由于差分讯号可以减少磁场份量,以及减少发散向外的电场,进而降低EMI辐射干扰,这也是为什么高速数字讯号一般都用差分讯号[1]。
而差分讯号除了可以产生较小的EMI辐射干扰,同时也具备了较佳的抗干扰能力[16-17],我们以下图说明:
B跟C为差分讯号,而A为邻近的讯号,当A跟B、C靠得很近时,A会把能量耦合到B跟C,以S参数表示,A耦合到B为S BA,A耦合到C为S CA。当B 跟C很靠近时,则S BA = S CA,而又因为B跟C的讯号方向相反,所以S BA跟S CA 是等量又反向,亦即彼此相消,这就是为何差分讯号拥有较佳的抗干扰能力。而在射频电路中,相较于发射讯号,接收讯号多半很微弱,因此其接收路径多半采差分型式,以便获得较佳的抗干扰能力,避免灵敏度下降。
而为了得到良好的频谱利用率,到了数字通讯时代,多半会利用IQ讯号,来达到SSB (Single-Sideband) 的调变方式[16],而因为IQ讯号会影响到调变与解调的精确度,因此不管是发射还接收电路,其IQ讯号都会走差分形式,避免调变与解调精确度,因噪声干扰而下降[16]。
Length
由前述已知,差分信号的逻辑判断,是仰赖两个信号的交点,因而受工艺,温度的影响小,能降低时序上的误差,如下图左。然而倘若该差分信号长度不相等,则会因相位差之故,导致切换电压的时间点不同,如下图右的黄圈处,进而使得逻辑判断错误[4]。
另外,由前述已知,数字信号在逻辑切换时,会因电压变换产生电场,进而产生EMI辐射,对邻近走线造成干扰,如下图[12] :
但差分讯号所产生的电场,会因彼此紧密地耦合在一起,进而减少发散向外的机会,进而减少EMI幅射干扰,如下图左。然而倘若该差分信号长度不相等,如下图右,此时Length 2为一单端讯号,亦即逻辑切换瞬间所产生的电场,会发散向外,产生EMI辐射干扰。若Length 2越长,表示该差分讯号的相位差越大,其切换噪声的脉冲宽度就越宽,维持时间就越长[4]。
同时也由前述已知,邻近噪声对差分讯号的耦合量,会彼此相消,因而提高抗干扰能力,然而倘若该差分信号长度不相等,如下图,则此时Length 2为一单端信号,A耦合到Length 2的能量无法消除,亦即B会很容易被A干扰。
而前述已知,为了得到良好的频谱利用率,到了数字通讯时代,多半会利用IQ 讯号,来达到SSB (Single-Sideband) 的调变方式,亦即频谱上只能有一个Sideband,如下图[16] :
且IQ讯号都会走差分形式,避免调变与解调精确度,因噪声干扰而下降,亦即会有I+、I-、Q+、Q- 四条讯号,如下图:
由[16]可知,I+、I-、Q+、Q- 四条讯号线都必须等长,才能确保IQ讯号相位差为90度,此时便如前述,频谱上只出现了一个Sideband,如下图左。而只要有任一讯号线不等长,那么IQ讯号相位差就不为90度,则称为IQ phase Imbalance,在频域上,会出现另一个我们不要的Sideband,称之为Image,如下图右[20]:
而Image与主频讯号的振幅差,称之为Sideband Suppression,若上图右的Length 2越长,则IQ phase Imbalance就越大,亦即Sideband Suppression就越小。反之,若四条讯号线都等长,亦即完全没有IQ phase Imbalance,那么理论上会完全无Image,如上图左。
而由[16]可知,解调时,会以所谓的EVM(Error Vector Magnitude),来衡量IQ phase Imbalance的程度,如下图:
而由[16]可知,EVM与SNR成反比,如下式:
亦即若前述的Length 2越长,那么IQ phase Imbalance越大,则EVM越大,SNR 越小,灵敏度就越差。
以上皆为差分讯号若不等长的影响,因此,在设计差分讯号时,最重要的就是要等长,越是高速讯号,越要注意等长[5-6]。然而实际上,有可能因为IC的Pin 位置关系,使得差分讯号会不等长[26]。
或是会因为转弯缘故,使得外侧走线会多出额外的长度,导致相位差,因而产生额外的共模噪声[26]。
因此通常会针对长度较短的走线,用所谓的蛇状线,额外再增加长度,使其差分讯号达到等长的目的,如下图[2] :
但要注意的是,其蛇状线要位于不等长之处,如下图绿圈处,而不要位于等长之处,如下图蓝圈处。因为纵使蛇状线,能使差分走线在接收端时的总长度等长,其相位差降到最低,然而下图蓝圈处跟绿圈处,都会因长度不等而有相位差,进而产生额外的共模噪声。换言之,绿圈走法是接收端几乎无相位差,但在讯号传递过程中,会有一次相位差,产生一次额外的共模噪声。而蓝圈走法是接收端几乎无相位差,但在讯号传递过程中,会有两次相位差,产生两次额外的共模噪声,因此最好采绿圈处走法。而上图是因为不等长之处在BGA的Pin里面,并无空间可以走蛇状线,因此只好将蛇状线设计在等长处。当然若空间许可,采绿圈处走法较佳[40-41]。
Separation
由[23]可知,差分讯号的阻抗,与间距会有关系,如下图[27] :
因此差分讯号的间距要维持固定,否则会因阻抗不连续而产生反射,进而导致EMI幅射干扰加大[12]。
另外,差分讯号的间距,不只与阻抗有关,也牵扯到抗干扰能力,我们以下图作说明。
B跟C为差分讯号,而A为邻近的讯号,当A跟B、C靠得很近时,亦即S1很小时,A会把能量耦合到B跟C,以S参数表示,A耦合到B为S BA,A耦合到C为S CA。如果B与C靠得很近,亦即S2很小,则S BA = S CA,而又因为B跟C 的讯号方向相反,所以S BA跟S CA是等量又反向,会彼此完全相消,因而将A对于B、C的干扰降到最低。然而,若B与C离得很远,亦即S2很大,则S BA > S CA,那么S BA跟S CA便无法完全相消,此时B会受A的干扰。由此可知,若差分讯号要具有最佳的抗干扰能力,则间距必须越小越好。当然,由前述可知,间距越小,其阻抗就越小,这会使阻抗无法控制得宜,因此,更精确一点讲,在符合阻抗控制的前提下,其间距必须越小越好,这样才可有较佳的抗干扰能力。
另外由前述可知,差分讯号可以减少磁场份量,以及减少发散向外的电场,进而降低EMI辐射干扰。然而,倘若S2过大,则磁场无法完全相消,且彼此间所产生的电场,也会因耦合量降低,进而增加发散向外的电场,导致EMI辐射干扰加大,因此,在符合阻抗控制的前提下,其间距必须越小越好,这样才可有较小的EMI辐射干扰。
而前述提到,因此通常会针对长度较短的走线,额外再增加长度,使其差分讯号达到等长的目的,如下图:
但由上图绿圈处可知,虽然等长目的达到了,但会因间距加大,导致阻抗不连续,抗干扰能力降低,以及EMI辐射干扰加大,该如何取舍呢?
前述说过,差分讯号不等长,会造成逻辑判断错误,而由[4]可知,间距不固定对逻辑判断的影响,几乎是微乎其微。而阻抗方面,间距不固定虽然会有变化,但其变化通常在10%以内,只相当于一个过孔的影响。至于EMI幅射干扰的增加,与抗干扰能力的下降,可在间距变化之处,用GND Fill技巧,并多打过孔直接连到Main GND,以减少EMI幅射干扰,以及被干扰的机会[24]。如前述,差分讯号最重要的就是要等长,因此若无法兼顾固定间距与等长,则需以等长为优先考虑。
Bend
前述提到,差分走线有可能会因为转弯缘故,使得外侧走线会多出额外的长度,导致相位差,因而产生额外的共模噪声,因此最常见的方法便是再转一次弯,使原本内侧走线变成外侧走线,增加额外长度,来达到等长之效[1]。
但上图的转弯方式,不管是第一次转弯还是第二次,都不尽理想,因为90度的转角,会造成阻抗不连续,进而产生反射[42]。
另外,由[43]可知,理想的差分讯号,是不存在模态转换,但90度转角会引起相位差,导致部分讯号会差模转共模,产生额外的共模噪声,进而产生EMI辐射干扰。
且由[42,44]可知,若上升时间越短,其90度转角引起的共模噪声就越大。
而下图中的L越长,其90度转角引起的共模噪声也越大[42]。
差分信号原理
差分信号(上) 我们中的大部分都能直观地理解信号是如何沿导线或走线传播的,即便我们也许对这种连接方式的名称并不熟悉——单端模式。术语“单端”模式将这种方式同至少其它两种信号传播模式区分开来:差模和共模。后面两种常常看起来更加复杂。 差模 差模信号沿一对走线传播。其中一根走线传送我们通常所理解的信号,另一根传送一个严格大小相等且极性相反(至少理论上如此)的信号。差分与单端 模式并不像它们乍看上去那样有很大的不同。记住,所有信号都有回路。一般地,单端信号从一个零电位,或地,电路返回。差分信号的每一分支都将从地电路返 回,除非因为每个信号都大小相 等且极性相反以至于返回电流完全抵消了(它们中没有任何一部分出现 在零电位或地电路上)。 尽管我不打算在专栏中就这个问题花太多时间,共模是指同时在一个(差分)信号的线对或者在单端走线和地上出现的信号。对我们来说这并不容易直观 地去理解,因为我们很难想象怎样才能产生这样的信号。相反通常我们不会产生共模信号。通常这些都是由电路的寄生环境或者从邻近的外部源耦合进电路产生的。 共模信号总是很“糟糕”,许多设计规则就是用来防止它们的发生。 差分走线 尽管看起来这样的顺序不是很好,我要在叙述使用差分走线的优点之前首先来讲述差分信号的布线规则。这样当我讨论(下面)这些优点时,就可以解释这些相关的规则是如何来支持这些优点的。 大部分时候(也有例外)差分信号也是高速信号。这样,高速设计规则通常也是适用的,尤其是关于设计走线使之看起来像是传输线的情况 。这意味着我们必须仔细地进行设计和布线,如此,走线的特征阻抗在沿线才能保持不变。 在差分对布线时,我们期望每根走线都与其配对走线完全一致。也就是说,在最大的可实现范围内,差分对中每根走线应该具有一致的阻抗与一致的长度。差分走线通常以线对的方式进行布线,线对的间距沿线处处保持不变。通常地,我们尽可能将差分对靠近布线。 差分信号的优点
设系统分别用下面的差分方程描述
因为x(n)以N 为周期,所以: x(n 中kN —m) =x(n -m) 第三套 1.设系统分别用下面的差分方程描述,x(n)与y(n)分别表示系统输入和输出, 判断系统是否是线性时不变的。 (1) y(n)=2x( n)+3 n y(n)= Z x(m) m 鱼 解: (1 ) 令:输入为x(n- n o ),输出为y '(n) =2x(n-山)+3,因为 y(n- n o ) =2x( n- n o )+3= y '(n) 故该系统是时不变的。又因为 T[ax 1 (n) + bx 2( n)] = 2ax 1 (n) + 2bx 2( n) + 3 T[ax i (n)] =2ax i (n)+3,T[bx 2(n)] =2bx 2(n) + 3 T[ax 1(n) + bx 2(n)] h aTIxJn)] +bT[x 2(n)] 故该系统是非线性系统。 n 令:输入为x(n- n o ),输出为y(n)=2: x(m-r t ),因为 m=0 n 』0 I y(n - n 。)= S x(m)北 y (n) m zzO 故系统是时变系统。又因为 n T[ax 1 (n) + bx 2(n)]=送(ax 1 (m) + bx 2(m)^ aT[x 1(n)] +bT[x 2(n)] m =0 2. 故系统是线性系统。 如果时域离散线性时不变系统的单位脉冲响应为 为周期的周期序列, 证明: h(n),输入x(n)是以N 试证明其输出 y(n)亦是以N 为周期的周期序列。 y( n)=h( n)*x( n)= □C y( n+kN)= Z m z=-oc h(m)x(n+kN - m) , k 为整数
【电路精选】单端至差分驱动器电路分析
【电路精选】单端至差分驱动器电路分析 模数转换器即A/D 转换器,或简称ADC,通常是指一个将模拟信号 转变为数字信号的电子元件。通常的模数转换器是将一个输入电压信号转换为 一个输出的数字信号。本文主要给大家介绍单端至差分驱动器电路分析。 由于数字信号本身不具有实际意义,仅仅表示一个相对大小。故任何一 个模数转换器都需要一个参考模拟量作为转换的标准,比较常见的参考标准为 最大的可转换信号大小。而输出的数字量则表示输入信号相对于参考信号的大小。 LTC2387-18 转换器电路LTC2387-18 是一款具有差分输入的15Msps、高度线性、低噪声SAR 转换器。该ADC 兼具卓越的线性和宽动态范围,因而成为了高速成像和仪表应用的理想选择。无延迟操作提供了一种面向高速控 制环路应用的独特解决方案。高输入频率下的非常低失真可实现需要宽动态范 围和大信号带宽的通信应用。 在大多数场合中,通过采用一个差分输入、差分输出放大器驱动ADC 输入来优化性能。在仅可提供一个单端信号的场合中,需要采用高性能运放以 把一个单端信号转换为一个适用于LTC2387-18 的差分信号。 在上面的电路中,使用了两个运放,一个用于同相通路,另一个用于反 相通路。同相运放是一个电压跟随器,它的前面是一个RC 低通滤波器。该滤波器可阻止非常高频率信号到达LT6201,它能够在几十MHz 的频率下运作。反相运放由一个相同的网络驱动。为了使信号反相,R5 和R7 设定为590Ω。这些电阻值反映了运放输出电流、输入失调电流和噪声产生量 之间的折衷。选定的电阻值加上4V 峰至峰输出电压摆幅导致从运放输出吸收
差分电路与单端电路的区别
差分信号与单端信号 一、基本区别 不说理论上的定义,说实际的单端信号指的是用一个线传输的信号,一根线没参考点怎么会有信号呢? easy,参考点就是地啊。也就是说,单端信号是在一跟导线上传输的与地之间的电平差那么当你把信号从A点传递到B点的时候,有一个前提就是A点和B点的地电势应该差不多是一样的,为啥说差不多呢,后面再详细说。差分信号指的是用两根线传输的信号,传输的是两根信号之间的电平差。当你把信号从A点传递到B点的时候,A点和B点的地电势可以一样也可以不一样但是A点和B点的地电势差有一个范围,超过这个范围就会出问题了。 二、传输上的差别 单端信号的优点是,省钱~方便~大部分的低频电平信号都是使用单端信号进行传输的。一个信号一根线,最后把两边的地用一根线一连,完事。缺点在不同应用领域暴露的不一样归结起来,最主要的一个方面就是,抗干扰能力差。首先说最大的一个问题,地电势差以及地一致性。大家都认为地是0V,实际上,真正的应用中地是千奇百怪变化莫测的一个东西我想我会专门写一些地方面的趣事。比如A点到B点之间,有那么一根线,用来连接两个系统之间的地那么如果这根线上的电流很大时,两点间的地电势可能就不可忽略了,这样一个信号从A的角度看起来是1V,从B的角度看起来可能只有0.8V了,这可不是一个什么好事情。这就是地电势差对单端信号的影响。接着说地一致性。实际上很多时候这个地上由于电流忽大忽小,布局结构远远近近地上会产生一定的电压波动,这也会影响单端信号的质量。差分信号在这一点有优势,由于两个信号都是相对于地的当地电势发生变化时,两个信号同时上下浮动(当然是理想状态下)差分两根线之间的电压差却很少发生变化,这样信号质量不久高了吗?其次就是传输过程中的干扰,当一根导线穿过某个线圈时,且这根线圈上通着交流电时,这根导线上会产生感应电动势~~好简单的道理,实际上工业现场遇到的大部分问题就是这么简单,可是你无法抗拒~如果是单端信号,产生多少,就是多少,这就是噪声你毫无办法。但是如果是差分信号,你就可以考虑拉,为啥呢,两根导线是平行传输的每根导线上产生的感应电动势不是一样吗,两个一减,他不久没了吗~确实,同样的情况下,传输距离较长时,差分信号具有更强的驱动能力、更强的抗干扰能力,同样的,当你传输的信号会对其他设备有干扰时,差分信号也比单端信号产生的信号相对小,也就是常说的EMI 特性。(EMI是Electro Magnetic Interference的缩写,即电磁干扰, 有传导干扰和辐射干扰两种。EMC是Electro magnetic compatibility的缩写,即电磁兼容性。意指设备所产生的电磁能量既不对其它设备产生干扰,也不受其他设备的电磁能量干扰的能力。) 三、使用时需要注意的 由于差分比单端有不少好处,在模拟信号传输中很多人愿意使用差分信号比如桥式应变片式力传感器,其输出信号满量程时有的也只有2mV 。如果使用单端信号传输,那么这个信号只要电源的纹波就能把他吃光。所以实际上,都是用仪表运方进行放大后,再进行处理。而仪表运方正是处理差分信号最有力的几个工具之一。但是,使用差分信号时,一定要注意一个问题,共模电压范围。也就是说,这两根线上的电压,相对于系统的地,还是不能太大。你传输0.1V的信号没问题,但是如果一根是1000.0 另外一根是1000.1,那就不好玩了问题在于,在很多场合下使用差分信号都是为了不让两个系统的地简单的共在一起更不能把差分信号中的一根直接接在本地系统的地上,那不白费尽吗?又成单端了,那么如何抑制共模电压呢?其实也挺简单的,将两根线都通过一个足够大的电阻,连接到系统的地上。这就像一
有限差分法
利用有限差分法分析电磁场边界问题 在一个电磁系统中,电场和磁场的计算对于完成该系统的有效设计师极端重要的。例如,在系统中,用一种绝缘材料是导体相互隔离是,就要保证电场强度低于绝缘介质的击穿强度。在磁力开关中,所要求的磁场强弱,应能产生足够大的力来驱动开关。在发射系统中进行天线的有效设计时,关于天线周围介质中电磁场分布的知识显然有实质性的意义。 为了分析电磁场,我们可以从问题所涉及的数学公式入手。依据电磁系统的特性,拉普拉斯方程和泊松方程只能适合于描述静态和准静态(低频)运行条件下的情况。但是,在高频应用中,则必须在时域或频域中求解波动方程,以做到准确地预测电场和磁场,在任何情况下,满足边界条件的一个或多个偏微分方程的解,因此,计算电池系统内部和周围的电场和磁场都是必要的。 对电磁场理论而言,计算电磁场可以为其研究提供进行复杂的数值及解析运算的方法,手段和计算结果;而电磁场理论则为计算电磁场问题提供了电磁规律,数学方程,进而验证计算结果。常用的计算电磁场边值问题的方法主要有两大类,其每一类又包含若干种方法,第一类是解析法;第二类是数值法。对于那些具有最简单的边界条件和几何形状规则的(如矩形、圆形等)问题,可用分离变量法和镜像法求电磁场边值问题的解析解(精确解),但是在许多实际问题中往往由于边界条件过于复杂而无法求得解析解。在这种情况下,一般借助于数值法求解电磁场的数值解。 有限差分法,微分方程和积分微分方程数值解的方法。基本思想是把连续的定解区域用有限个离散点构成的网络来代替,这些离散点称作网格的节点;把连续定解区域上的连续变量的函数用在网格上定义的离散变量函数来近似;把原方程和定解条件中的微商用差商来近似,积分用积分和来近似,于是原微分方程和定解条件就近似地代之以代数方程组,即有限差分方程组,解此方程组就可以得到原问题在离散点上的近似解。然后再利用插值方法便可以从离散解得到定解问题在整个区域上的近似解。 差分运算的基本概念: 有限差分法是指用差分来近似取代微分,从而将微分方程离散成为差分方程组。于是求解边值问题即转换成为求解矩阵方程[5]。 对单元函数 ()x f而言,取变量x的一个增量x?=h,则函数()x f的增量可以表示为 ()x f? = ()h x f+-()x f 称为函数()x f 的差分或一阶差分。函数增量还经常表示为 ()x f? = ? ? ? ? ? + 2 h x f - ? ? ? ? ? - 2 h x f
差分信号和单端信号概述.
差分信号与单端信号概述 差分信号和普通的单端信号走线相比,最明显的优势体现在以下三个方面: a.抗干扰能力强,因为两根差分走线之间的耦合很好,当外界存在噪声干扰时,几乎是同时被耦合到两条线上,而接收端关心的只是两信号的差值,所以外界的共模噪声可以被完全抵消。 b.能有效抑制EMI(电磁干扰),同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。 c. 时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。目前流行的LVDS(low voltage differential signaling)就是指这种小振幅差分信号技术。 1、共模电压和差模电压 我们需要的是整个有意义的“输入信号”,要把两个输入端看作“整体”。就像初中时平面坐标需要用 x,y 两个数表示,而到了高中或大学就只要用一个“数”v,但这个 v 是由 x,y 两个数构成的“向量”…… 而共模、差模正是“输入信号”整体的属性,差分输入可以表示为 vi = (vi+, vi-)也可以表示为vi = (vic, vid)。c 表示共模,d 表示差模。两种描述是完全等价的。只不过换了一个认识角度,就像几何学里的坐标变换,同一个点在不同坐标系中的坐标值不同,但始终是同一个点。 运放的共模输入范围:器件(运放、仪放……)保持正常放大功能(保持一定共模抑制比 CMRR)条件下允许的共模信号的范围。 显然,不存在“某一端”上的共模电压的问题。但“某一端”也一样存在输入电压范围问题。而且这个范围等于共模输入电压范围。 道理很简单:运放正常工作时两输入端是虚短的,单端输入电压范围与共模输入电压范围几乎是一回事。对其它放大器,共模输入电压跟单端输入电压范围就有区别了。例如对于仪放,差分输入不是 0,实际工作时的共模输入电压范围就要小于单端输入电压范围了。 可以通俗的理解为: 两只船静止在水面上,分别站着两个人,A和B。 A和B相互拉着手。当船上下波动时,A才能感觉到B变化的拉力。这两个船之间的高度差就是差模信号。当水位上升或者下降时,A并不能感觉到这个拉力。这两个船离水底的绝对高度就是共模信号。 于是,我们说A和B只对差模信号响应,而对共模信号不响应。当然,也有一定的共模范围了,太低会沉到水底,这样船都无法再波动了。太高,会使会水溢出而形成水流导致船没法在水面上停留。理论上,A 和B应该只是对差模有响应。 但实际上,由于船上下颠簸,A和B都晕了,明明只有共模,却产生了幻觉:似乎对方相对自己在动。这就说明,A和B内力较弱,共模抑制比不行啊。说笑了啊,不过大致也就是这个意思。 当然,差模电压也不可以太大,否则会导致把A和B拉开。
差分信号与单端信号
差分信号与单端信号(转) 一、基本区别 不说理论上的定义,说实际的 单端信号指的是用一个线传输的信号,一根线没参考点怎么会有信号呢?easy,参考点就是地啊。也就是说,单端信号是在一跟导线上传输的与地之间的电平差 那么当你把信号从A点传递到B点的时候,有一个前提就是A点和B点的地电势应该 差不多是一样的,为啥说差不多呢,后面再详细说。 差分信号指的是用两根线传输的信号,传输的是两根信号之间的电平差。 当你把信号从A点传递到B点的时候,A点和B点的地电势可以一样也可以不一样 但是A点和B点的地电势差有一个范围,超过这个范围就会出问题了。 二、传输上的差别 单端信号的优点是,省钱~方便~ 大部分的低频电平信号都是使用单端信号进行传输的。一个信号一根线,最后把两边的地用一根线一连,完事。 缺点在不同应用领域暴露的不一样 归结起来,最主要的一个方面就是,抗干扰能力差。 首先说最大的一个问题,地电势差以及地一致性。 大家都认为地是0V,实际上,真正的应用中地是千奇百怪变化莫测的一个东西 我想我会专门写一些地方面的趣事。 比如A点到B点之间,有那么一根线,用来连接两个系统之间的地 那么如果这根线上的电流很大时,两点间的地电势可能就不可忽略了,这样一个信号 从A的角度看起来是1V,从B的角度看起来可能只有0.8V了,这可不是一个什么好事情 这就是地电势差对单端信号的影响。 接着说地一致性。实际上很多时候这个地上由于电流忽大忽小,布局结构远远近近 地上会产生一定的电压波动,这也会影响单端信号的质量。 差分信号在这一点有优势,由于两个信号都是相对于地的 当地电势发生变化时,两个信号同时上下浮动(当然是理想状态下) 差分两根线之间的电压差却很少发生变化,这样信号质量不久高了吗? 其次就是传输过程中的干扰,当一根导线穿过某个线圈时,且这根线圈上通着交流电 时,这根导线上会产生感应电动势~~好简单的道理,实际上工业现场遇到的大部分 问题就是这么简单,可是你无法抗拒~ 如果是单端信号,产生多少,就是多少,这就是噪声你毫无办法。 但是如果是差分信号,你就可以考虑拉,为啥呢,两根导线是平行传输的 每根导线上产生的感应电动势不是一样吗,两个一减,他不久没了吗~ 确实,同样的情况下,传输距离较长时,差分信号具有更强的驱动能力、更强
离散系统差分方程计算
1.设离散控制系统差分方程为x采样周期T。试求:(1) 系统的脉冲传递函数。(2)系统的频率特性表达式。 解:差分方程两边取Z变换,得 脉冲传递函数 频率特性 2.假设离散系统差分方程为。其中; ,,,。试求:(1)分析系统的稳定性。(2),,。 解:(1)对差分方程两边取Z变换,得 特征方程: 解得:; 由于,即系统稳定。 (2)n=0时, n=1时, n=2时, 3.某离散控制系统的差分方程为,其中: ,,,,,,。试求:(1),。(2)分析稳定性。 解:(1)对差分方程两边Z变换,得 特征方程: 解得:; 由于,所以系统稳定。
(2)n=0时, n=1时。 4.离散控制系统的差分方程为:,其中 ,,时,时。试求:(1),,。(2)脉冲传递函数。 解:(1)差分方程两边取Z变换,得 特征方程: 解得:; 由于,所以系统稳定。 (2)n=0时, n=1时, n=2时, 5.已知:离散控制系统的差分方程为。试求:脉冲传 递函数。系统频率特性 解:对差分方程Z变换,得 频率特性 6.某离散系统的差分方程为=,其中 ,。试求(1)脉冲传递函数,并分析稳定。(2) ,,。 解:对差分方程两边Z变换,得 ()
特征方程: 解得:; 由于,所以系统稳定。 (2)n=0时, n=1时, n=2时,y 7.已知离散系统的差分方程为,试求:(1)脉冲传递 函数。(2)分析系统稳定性 解:(1)对差分方程两边Z变换,得 (2)特征方程:=0 解得:; 由于,所以系统临界稳定。 8.离散系统差分方程为,其中 ,;。试求:,,。()分析稳定性。 解:(1)n=0时, n=1时, n=2时, (2)对差分方程两边Z变换,得 特征方程: 解得:; 由于,所以系统稳定。 9.某离散系统差分方程为,其中:, 时,;时,。试求:,,。(2)分析
全差分伪差分单端输入ADC理解
伪差分: 伪差分信号连接方式减小了噪声,并允许在仪器放大器的共模电压范围内与浮动信号连接.在伪差分模式下,信号与输入的正端连接,信号的参考地与输入的负端连接。伪差分输入减小了信号源与设备的参考地电位(地环流)不同所造成的影响,这提高了测量的精度。伪差分输入与差分输入在减小地环流和噪声方面是非常相似的,不同的方面在于,差分输入模式下,负端输入是随时间变化的,而在伪差分模式下,负端输入一定仅仅是一个参考。描述伪差分的另外一种方式就是,输入仅仅在打破地的环流这个意义上是差分的,而参考信号(负端输入)不是作为传递信号的,而仅仅是为信号(正端输入)提供一个直流参考点。 全差分与单端输入: 在单端方式工作时;ADC转换的是单输入引脚对地的电压值;在增益为1时,测量的值就是输入的电压值;范围是0V到VREF;当增益增加时,输入的范围要相应的减小; 在差分方式工作时;ADC转换的是AIN+与AIN-两个引脚的差值;在增益为1时,测量的值等于(AIN+)-(AIN-),范围是-VREF到+VREF;当增益增加时,输入的范围要相应的减小。 注意:在差分方式时所提的负压是指AIN-引脚的电压大于AIN+引脚的电压,实际输入到两个引脚的电压对地都必需是正的;例如:如果AIN+引脚输入的电压为0V,AIN-引脚的输入电压为1/2VREF时,差分的输入电压为(0V-1/2VREF) = -1/2VREF。 ADI公司目前针对10KHz左右采样速率的24位ADC推荐AD719X系列的产品。AD779X属于老产品,老产品噪声较大。 对于单端输入,能测量双极性信号的ADC,内部原理为基准源分压方式,对于TI的MSP430F1161,基准源可提供正负方式。 对于ADuC845的AD输入配置,可以配置为4个全差分输入,或者8个伪差分输入,对于伪差分输入,AINCOM端为参考端。GAIN越大,ADC的有效分辨率越小,采样速率越高,有效分辨率也越小。 上图参数可得出,全差分的每个输入端口电压不能低于0V,也不能高于规定的电压值。 ADI 的工程师说对于单端输入的单电源供电的AD转换器,能采集双极性信号的是,ADC内部原理是通过分压方式,可以参考MAX197的数据手册。
差分信号在通信系统设计中有什么优势
差分信号在通信系统设计中有什么优势 上网日期: 2010年11月01日已有[ 2 ]个评论打印版发送查询订阅 关键字:差分信号通信系统RF 通信系统设计的主要挑战之一是如何成功捕获高保真度信号。为了避免强干扰效应、信号失真和灵敏度降低,蜂窝通信系统必须满足蜂窝标准的严格要求,比如具有高动态范围、高输入线性度和低噪声的码分多址(CDMA)和宽带CDMA(W-CDMA)。 过去,一些实践性问题常导致完全差分信号链的性能优势被单端信号链所掩盖,但随着集成射频电路技术和高性能差分射频构建模块的不断发展,如今差分架构已能应用于高性能接收机设计中。本文将讨论差分信号链在3G和4G无线应用中的性能和优点。 接收机信号链 图1是传统超外差接收机的拓扑结构,它很好地描述了差分信号链相对单端信号链的优势。不管采用什么拓扑,我们的目标就是将所需信号成功发送到ADC端进行数字转化。信号路径由以下几个射频模块组成:天线、滤波器、低噪声放大器(LNA)、混频器、ADC驱动放大器和ADC。 图1:接收机在不断发展,越来越多的接收机将使用差分元件。这个趋势开始于ADC,并将逐渐向信
号链上游移动。先进的集成射频电路技术和差分射频构建模块的扩充允许差分架构应用于高性能接收机设计。 LNA是天线之后的第一个模块,用于放大热噪声之上的信号。这级电路中的噪声非常重要,因为它将决定系统灵敏度,而放大可以确保随后的混频器和放大器不会增加显著的噪声。沿信号路径往后是带通滤波器,用于抑制带外信号,减少由其它电路级引起的失真和噪声。 跟随LNA之后,混频器频率转换感兴趣的信号,将高频射频信号下变频至频率更低、更易于管理的中频信号(IF)。ADC驱动放大器和抗混滤波器(AAF)对将要数字化的信号进行预处理。驱动器提供增益,AAF抑制第一奈奎斯特区外的信号,包括将会发送给ADC的噪声和带外杂散分量。在模拟信号路径末端,由ADC完成基带信息的数字转换。 理想情况下,只有感兴趣的信号(图1左边的蓝色图形)才会被传送到数字域。需要使用一个鲁棒系统来处理这个可能很小的目标信号,同时抑制可能较大的干扰信号。鲁棒系统的设计,需要具有高灵敏度、输入线性、选择性和抗噪声性能。根据具体的应用和架构,性能指标可能有所变化,但在大多数通信系统中,像失真、本底噪声和动态范围等都是通常要考虑的要素。输入三阶截取点(IP3)和1dB 压缩点(P1dB)必须高。其它需要考虑的因素还包括低成本、低功耗和小尺寸。 差分优势 图2比较了单端信号和差分信号之间的基本区别。这里使用了一个通用增益模块,但相同的概念可应用于信号链中的混频器和其它器件。在比较单端和差分信号时,要将系统级性能评估标准牢记在心,以实现良好的总体接收机设计。
有限元法与有限差分法的主要区别
有限元法与有限差分法的主要区别 有限差分方法(FDM)是计算机数值模拟最早采用的方法,至今仍被广泛运用。该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。有限差分法以Taylor级数展开等方法,把控制方程中的导数用网格节点上的函数值的差商代替进行离散,从而建立以网格节点上的值为未知数的代数方程组。该方法是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表达简单,是发展较早且比较成熟的数值方法。对于有限差分格式,从格式的精度来划分,有一阶格式、二阶格式和高阶格式。从差分的空间形式来考虑,可分为中心格式和逆风格式。考虑时间因子的影响,差分格式还可以分为显格式、隐格式、显隐交替格式等。目前常见的差分格式,主要是上述几种形式的组合,不同的组合构成不同的差分格式。差分方法主要适用于有结构网格,网格的步长一般根据实际地形的情况和柯朗稳定条件来决定。构造差分的方法有多种形式,目前主要采用的是泰勒级数展开方法。其基本的差分表达式主要有三种形式:一阶向前差分、一阶向后差分、一阶中心差分和二阶中心差分等,其中前两种格式为一阶计算精度,后两种格式为二阶计算精度。通过对时间和空间这几种不同差分格式的组合,可以组合成不同的差分计算格式。有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。采用不同的权函数和插值函数形式,便构成不同的有限元方法。有限元方法最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。在有限元方法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元内选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看为由每个单元基函数组成的,则整个计算域内的解可以看作是由所有单元上的近似解构成。在河道数值模拟中,常见的有限元计算方法是由变分法和加权余量法发展而来的里兹法和伽辽金法、最小二乘法等。根据所采用的权函数和插值函数的不同,有限元方法也分为多种计算格式。从权函数的选择来说,有配置法、矩量法、最小二乘法和伽辽金法,从计算单元网格的形状来划分,有三角形网格、四边形网格和多边形网格,从插值函数的精度来划分,又分为线性插值函数和高次插值函数等。不同的组合同样构成不同的有限元计算格式。对于权函数,伽辽金(Galerkin)法是将权函数取为逼近函数中的基函数;最小二乘法是令权函数等于余量本身,而内积的极小值则为对代求系数的平方误差最小;在配置法中,先在计算域内选取N个配置点。令近似解在选定的N个配置点上严格满足微分方程,即在配置点上令方程余量为0。插值函数一般由不同次幂的多项式组成,但也有采用三角函数或指数函数组成的乘积表示,但最常用的多项式插值函数。有限元插值函数分为两大类,一类只要求插值多项式本身在插值点取已知值,称为拉格朗日(Lagrange)多项式插值;另一种不仅要求插值多项式本身,还要求它的导数值在插值点取已知值,称为哈密特(Hermite)多项式插值。单元坐标有笛卡尔直角坐标系和无因次自然坐标,有对称和不对称等。常采用的无因次坐标是一种局部坐标系,它的定义取决于单元的几何形状,一维看作长度比,二维看作面积比,三维看作体积比。在二维有限元中,三角形单元应用的最早,近来四边形等参元的应用也越来越广。对于二维三角形和四边形电源单元,常采用的插值函数为有La grange插值直角坐标系中的线性插值函数及二阶或更高阶插值函数、面积坐标系中的线性插值函数、二阶或更高阶插值函数等。对于有限元方法,其基本思路和解题步骤可归纳为(1)建立积分方程,根据变分原理或方程余量与权函数正交化原理,建立与微分方程初边值问题等价的积分表达式,这是有限元法的出发点。(2)区域单元剖分,根据求解区域的形状及实际问题的物理特点,将区域剖分为若干相互连接、不重叠的单元。区域单元划分是采用有限元方法的前期准备工作,这部分工作量比较大,除了给计算单元和节点进行编号和确定相互之间的关系之外,还要表示节点的位置坐标,同时还需要列出自然边界和本质边界的节点序号和相应的边界值。(3)确定单元基函数,根据单元中节点数目及对近似解精度的要求,选择满足一定插
单端转差分
采用差分PulSAR ADC AD7982转换单端信号 关键字:差分PulSAR ADC AD7982 单端信号 电路功能与优势 许多应用都要求通过高分辨率、差分输入ADC来转换单端模拟信号,无论是双极性还是单极性信号。本直流耦合电路可将单端输入信号转换为差分信号,适合驱动PulSAR系列ADC中的18位、1 MSPS器件AD7982。该电路采用单端转差分驱动器ADA4941-1 和超低噪声5.0 V基准电压源ADR435 ,可以接受许多类型的单端输入信号,包括高压至低压范围内的双极性或单极性信号。整个电路均保持直接耦合。如果需要重点考虑电路板空间,可以采用小封装产品,图1所示的所有IC均可提供3 mm × 3 mm LFCSP或3 mm × 5 mm MSOP小型封装。 图1:单端转差分直流耦合驱动器电路(原理示意图) 电路描述 AD7982的差分输入电压范围由REF引脚上的电压设置。当VREF = 5 V时,差分输入电压范围为±VREF = ±5 V。从单端源VIN到ADA4941-1的OUTP的电压增益(或衰减)由R2与R1之比设置。R2与R1之比应等于VREF 与输入电压峰峰值VIN之比。当单端输入电压峰峰值为10 V且VREF = 5 V时,R2与R1之比应为0.5。OUTN上的信号为OUTP 信号的反相。R1的绝对值决定电路的输入阻抗。反馈电容CF根据所需的信号带宽选择,后者约为1/(2πR2CF)。20 Ω电阻与2.7 nF电容构成3 MHz单极点低通噪声滤波器。电阻R3和R4设置AD7982的IN?输入端的共模电压。 此共模电压值等于VOFFSET2 × (1 + R2/R1),其中VOFFSET2 = VREF × R3/(R3 + R4)。电阻R5和R6设置ADC的IN+输入端的共模电压。此电压等于VOFFSET1 = VREF × R5/(R5
选用单端探头还是差分探头
选用单端探头还是差分探头 作者:Mike McTigue 新的有源探头体系结构使GHz级以上的千兆信号的完整性测量变得更加容易、精度也更高,但这只对于了解探头的工作原理和探头的两种拓扑结构之间优劣的用户而言的。 宽带宽示波器和有源探头的用户历来可以在单端探头和差分探头之间作出选择。测量单端信号(对地参考电压),你使用的是单端探头,而测量差分信号(正电压对负电压),你使用的是差分探头。那么,为什么你不能只买差分探头来测量差分信号和单端信号呢?实际情况是,你可以这样做,但又存在实实在在的理由使你不能这么做。与单端探头相比,差分探头价格较贵,使用不大方便,带宽也较窄。 新的探头体系结构,如Agilent 113X 系列的体系结构可以探测差分信号,也可以探测单端信号,而且基本上使人们不反对使用差分探头。这些探头是通过可互换的端头来提供这种能力的,而各种可互换的头经过优化,可以点测、插入插座和焊入探头。这种结构给有源探头的用户提出了新问题:测量单端信号,到底该用差分探头还是该用单端探头?答案是应由性能和可用性两个方面的权衡结果来定夺。 只要使用Agilent 1134A型7 GHz 探头放大器的简化模型(图1) 和已测数据以及焊入的差分和单端探头端头(图2),你就可以比较它们的带宽、保真度、可用性、共模抑制特性、可重复性和尺寸大小等方面的差别。这些探头端头的物理连线几何形状相同,所以它们之间的主要性能差别是由差分拓扑结构和单端拓扑结构引起的。探头性能测量是采用Agilent E2655A 纠偏/性能验证夹具和Agilent 8720A 20 GHz 向量网络分析仪或者Agilent Infiniium DCA (数字通信分析仪)采样示波器进行的。 图1 差分探头和单端探头的简化模型的主要区别在于,差分探头的地线电感是与放大器输入端串联的,而不
高频情况下的单端信号和差分信号的转换
Single-to-differential Conversion in High-frequency Applications Introduction The aim of this application note is to provide the user with different techniques for sin-gle-to-differential conversions in high frequency applications. The first part of this document gives a few techniques to be used in applications where a single-to-differential conversion is needed. The second part of the document applies the same techniques to Atmel broadband data conversion devices, taking into account the configuration of the converters’ input buffers. This document does not give an exhaustive panel of techniques but should help most users find a convenient method to convert a single-ended signal source to a differen- tial signal.
差分信号
差分信号 我们中的大部分都能直观地理解信号是如何沿导线或走线传播的,即便我们也许对这种连接方式的名称并不熟悉——单端模式。术语“单端”模式将这种方式同至少其它两种信号传播模式区分开来:差模和共模。后面两种常常看起来更加复杂。 差模 差模信号沿一对走线传播。其中一根走线传送我们通常所理解的信号,另一根传送一个严格大小相等且极性相反(至少理论上如此)的信号。差分与单端模式并不像它们乍看上去那样有很大的不同。记住,所有信号都有回路。一般地,单端信号从一个零电位,或地,电路返回。差分信号的每一分支都将从地电路返回,除非因为每个信号都大小相 等且极性相反以至于返回电流完全抵消了(它们中没有任何一部分出现在零电位或地电路上)。 尽管我不打算在专栏中就这个问题花太多时间,共模是指同时在一个(差分)信号的线对或者在单端走线和地上出现的信号。对我们来说这并不容易直观地去理解,因为我们很难想象怎样才能产生这样的信号。相反通常我们不会产生共模信号。通常这些都是由电路的寄生环境或者从邻近的外部源耦合进电路产生的。共模信号总是很“糟糕”,许多设计规则就是用来防止它们的发生。 差分走线 尽管看起来这样的顺序不是很好,我要在叙述使用差分走线的优点之前首先来讲述差分信号的布线规则。这样当我讨论(下面)这些优点时,就可以解释这些相关的规则是如何来支持这些优点的。 大部分时候(也有例外)差分信号也是高速信号。这样,高速设计规则通常也是适用的,尤其是关于设计走线使之看起来像是传输线的情况。这意味着我们必须仔细地进行设计和布线,如此,走线的特征阻抗在沿线才能保持不变。
在差分对布线时,我们期望每根走线都与其配对走线完全一致。也就是说,在最大的可实现范围内,差分对中每根走线应该具有一致的阻抗与一致的长度。差分走线通常以线对的方式进行布线,线对的间距沿线处处保持不变。通常地,我们尽可能将差分对靠近布线。 差分信号的优点 “单端”信号通常参考到某些“参考”电位。这有可能是正的或者是地电压,一个器件的门限电压,或者另外某处的信号。另一方面,差分信号仅参考到与其配对信号。也就是说,如果一根走线(正信号)上的电压比另外一根走线(负信号)高,我们就得到了一个逻辑状态,如果是低,我们就得到另外一个逻辑状态(见图1)。这样有几个好处: 时序可以更精确地定义,因为控制一对信号的交点比控制一个关于其他参考电压的绝对电压容易。这也是走线要精确等长的原因之一。任何在源端所进行的时序控制都可以让步,如果信号在不同的时间到达另一端。进一步来讲,如果线对的远端信号没有精确相等且极性相反,共模信号就可能产生并将导致信号时序与EMI问题。 因为除了自身,差分信号没有参考任何其它信号,并且信号交叉的同步可以更有力地控制,差分电路通常可以运行在比类似的单端电路更高的频率上。 因为差分电路对两根走线(两者的信号大小相等极性相反)上信号的差作出响应,得到的净信号两倍于(可比的环境噪声)任一单端信号。因此在其它条件等同的情况下,差分信号有着更大的信噪比及性能。 差分电路对线对信号之间的电位差敏感。但是(相对地)对线上与其它参考电压相比(特别是地)的绝对电位不敏感。因此,相对而言,差分电路对诸如地弹、其它存在于电源和/ 或地平面的噪声信号以及可能出现在每一根走线中相等的共模信号这样的问题不敏感。 差分信号对EMI和串扰略微免疫。如果线对走得很近,这样任何外部耦合噪声将相等地耦合进线对。这样一来耦合噪声就变成“共模”噪声,而电路对此是(理论上)免疫的。如果导线是“缠绕”(比如双绞线)的,那么对噪声的免疫性就更好。因为我们不能方便地将印制板上的差分走线缠绕起来,把它们尽可能地靠近走线就是最好的办法了。
16位10 MSPS ADC AD7626的单端转差分高速驱动电路
电路笔记 CN-0105 连接/参考器件 利用ADI 公司产品进行电路设计 AD762616位、10 MSPS PulSAR 差分ADC 放心运用这些配套产品迅速完成设计。 ADA4932-1低功耗差分ADC 驱动器 欲获得更多信息和技术支持,请拨打4006-100-006或访问https://www.wendangku.net/doc/bd5386019.html,/zh/circuits 。 2.7 V 、800 μA 、80 MHz 轨到轨输入/输出放大器 AD8031 16位10 MSPS ADC AD7626的单端转差分高速驱动电路 ADA4932-1具有低失真(10 MHz 时100 dB SFDR )、快速建立时间(9 ns 达到0.1%)、高带宽(560 MHz ,-3 dB ,G = 1)和低电流(9.6 mA )等特性,是驱动AD7626的理想选择。它还能轻松设定所需的输出共模电压。 电路功能与优势 图1所示电路可将高频单端输入信号转换为平衡差分信号,用于驱动16位10 MSPS PulSAR ? ADC AD7626。 该电路采用低功耗差分放大器ADA4932-1来驱动ADC ,最大限度提升AD7626的高频输入信号音性能。此器件组合的真正优势在于低功耗、高性能。 该组合提供了业界领先的动态性能并减小了电路板面积:AD7626采用5 mm × 5mm 、32引脚LFCSP 封装,ADA4932 -1采用3mm× 3mm 、16引脚LFCSP 封装),AD8031采用5引脚SOT23封装。 AD7626具有突破业界标准的动态性能,在10 MSPS 下信噪比为91.5 dB ,实现16位INL 性能,无延迟,LVDS 接口,功耗仅有136 mW 。AD7626使用SAR 架构,主要特性是能够以10 MSPS 无延迟采样,不会发生流水线式ADC 常有的“流水线延迟”,同时具备出色的线性度。 图1. ADA4932-1驱动AD7626(未显示去耦和所有连接) Rev.0 “Circuits from the Lab” from Analog Devices have been designed and built by Analog Devices engineers. Standard engineering practices have been employed in the design and construction of each circuit, and their function and performance have been tested and verified in a lab environment at room temperature. However, you are solely responsible for testing the circuit and determining its suitability and applicability for your use and application. Accordingly, in no event shall Analog Devices be liable for direct, indirect, special, incidental, consequential or One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A. Tel: 781.329.4700 https://www.wendangku.net/doc/bd5386019.html, Fax: 781.461.3113 ?2010 Analog Devices, Inc. All rights reserved.
差分信号基础知识
差分信号 1概述 差分传输是一种信号传输的技术,区别于传统的一根信号线一根地线的做法,差分传输 差分信号(4张) 在这两根线上都传输信号,这两个信号的振幅相等,相位相反。在这两根线上的传输的信号就是差分信号。信号接收端比较这两个电压的差值来判断发送端发送的是逻辑0还是逻辑1。在电路板上,差分走线必须是等长、等宽、紧密靠近、且在同一层面的两根线。 2简介 含义 差分信号是用一个数值来表示两个物理量之间的差异。差分信号又称差模信号,是相对共模信号而言的。 我们用一个方法对差分信号做一下比喻,差分信号就好比是跷跷板上的两个人,当一个人被跷上去的时候,另一个人被跷下来了- 但是他们的平均位置是不变的。继续跷跷板的类推,正值可以表示左边的人比右边的人高,而负值表示右边的人比左边的人高。0 表示两个人都是同一水平。图1 用跷跷板表示的差分信号应用到电学上,这两个跷跷板用一对标识为V+和V-的导线来表示。 特点
从严格意义上来讲,所有电压信号都是差分的,因为一个电压只能是相对于另一个电压而言的。在某些系统里,"系统地"被用作电压基准点。当'地'当作电压测量基准时,这种信号规划被称之为单端的。我们使用该术语是因为信号是用单个导体上的电压来表示的。另一方面,一个差分信号作用在两个导体上。信号值是两个导体间的电压差。尽管不是非常必要,这两个电压的平均值还是会经常保持一致。 可以想象,这两个导体上被同时加入的一个相等的电压,也就是所谓共模信号,对一个差分放大系统来说是没有作用的,也就是说,尽管一个差分放大器的输入有效信号幅度只需要几毫伏,但它却可以对一个高达几伏特的共模信号无动于衷。这个指标叫做差分放大器的共模抑制比(CMRR),一般的运算放大器可以达到90db以上,高精度运放甚至达到120db。因为干扰信号一般是以共模信号的形式存在,所以差分信号的应用极大地提高了放大器系统的信噪比。 优点 当不采用单端信号而采取差分信号方案时,我们用一对导线来替代单根导线,增加了任何相关接口电路的复杂性。那么差分信号提供了什么样的有形益处,才能证明复杂性和成本的增加是值得的呢? 差分信号的第一个好处是,因为你在控制'基准'电压,所以能够很容易地识别小信号。在一个地做基准,单端信号方案的系统里,测量信号的精确值依赖系统内'地'的一致性。信号源和信号接收器距离越远,他们局部地的电压值之间有差异的可能性就越大。从差分信号恢复的信号值在很大程度上与'地'的精确值无关,而在某一范围内。 差分信号的第二个主要好处是,它对外部电磁干扰(EMI)是高度免疫的。一个干扰源几乎相同程度地影响差分信号对的每一端。既然电压差异决定信号值,这样将忽视在两个导体上出现的任何同样干扰。除了对干扰不大灵敏外,差分信号比单端信号生成的EMI 还要少。 差分信号提供的第三个好处是,在一个单电源系统,能够从容精确地处理'双极'信号。为了处理单端,单电源系统的双极信号,我们必须在地和电源干线之间某任意电压处(通常是中点)建立一个虚地。用高于虚地的电压来表示正极信号,低于虚地的电压来表示负极信号。接下来,必须把虚地正确地分布到整个系统里。而对于差分信号,不需要这样一个虚地,这就使我们处理和传播双极信号有一个高真度,而无须依赖虚地的稳定性。 作用 对差分信(VDS)号而言,对其影响最大的因素是它们的对地阻抗是否一致,也就是对地平衡度,它们之间相对的阻抗影响并不特别重要,之间分布电容大了只会衰落信号强度,