自动识别路径小车

自动识别路径的智能小车设计报告
来源:kaoshi365 作者:kaoshi365 日期:2009年11月12日访问次数: 625次论文关键字:智能小车电机驱动L298 自动循迹传感器算法
论文摘要:本系统采用存储空间较大的AT89S52作为主控制芯片,电动车电机驱动采用L298N芯片,结合DS10C4光电开关控制电动小汽车的自动寻路,快慢速行驶和转向,三者的结合使小车更加智能化,自动化。整个系统在设计中注意低功耗处理和力求高性价比等细节,电路结构简单,可靠性能高,无论在结构和技术上都具有较好的科学性。
本设计主要特点:
1. 高效的L298电机驱动电路,提高电源利用率。
2.利用软件实现PWM调速的方法。代替了专用集成芯片电路、通用数字组合电路、分立元器件组成电路、单片机系统控制电路、CPLD系统等。
一、模块方案比较与论证:
1. 车体设计
方案一:购买玩具电动车。购买的玩具电动车具有组装完整的车架车轮。由于装配紧凑,使得各种所需电路的安装十分方便,看起来也比较美观。但玩具电动车一般都价格昂贵。
方案二:自己制作电动车。一般的说来,自己制作的车体比较粗糙,对于白色基板上的道路面行驶,车身重量以及平衡都要有精确的测量,而且也要控制好小车行驶的路线和转弯的力矩及角度,这些都比较难良好地实现。依靠电机与相关齿轮一起驱动,能适应题目中小车准确前进、后退、转弯的要求,
基于以上分析,我们选择了方案二
2.电机模块
方案1:采用步进电机作为该系统的驱动电机。由于其转过的角度可以精确的定位,可以实现小车前进路程和位置的精确定位。虽然采用步进电机有诸多优点,步进电机的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适用于小车等有一定速度要求的系统。经综合比较考虑,我们放弃了此方案。
方案 2:直流电机:直流电机的控制方法比较简单,只需给电机的两根控制线加上适当的电压即可使电机转动起来,电压越高则电机转速越高。对于直流电机的速度调节,可以采用改变电压的方法,也可采用PWM调速方法。PWM调速就是使加在直流电机两端的电压为方波形式,通过改变方波的占空比实现对电机转速的调节。
基于以上分析,我们选择了方案二,使用直流电机作为电动车的驱动电机。
3.电机驱动模块
方案 1:采用SM6135W电机遥控驱动模块。SM6135W是专为遥控车设计的大规模集成电路。能实现前进、后退、向右、向左、加速五个功能,但是其采用的是编码输入控制,而不是电平控制,这样在程序中实现比较麻烦,而且该电机模块价格比较高。
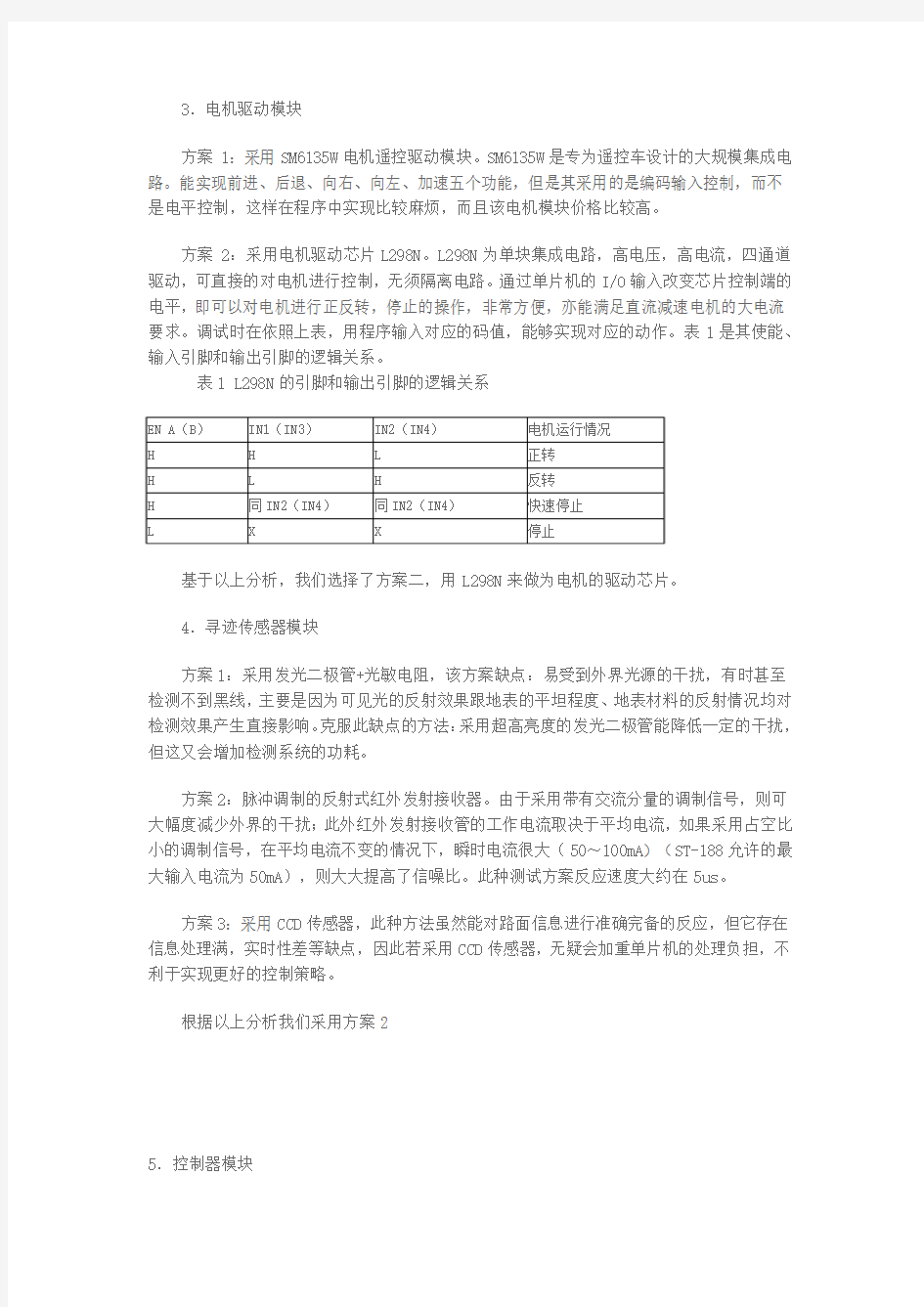
方案 2:采用电机驱动芯片L298N。L298N为单块集成电路,高电压,高电流,四通道驱动,可直接的对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,非常方便,亦能满足直流减速电机的大电流要求。调试时在依照上表,用程序输入对应的码值,能够实现对应的动作。表1是其使能、输入引脚和输出引脚的逻辑关系。
表1 L298N的引脚和输出引脚的逻辑关系
基于以上分析,我们选择了方案二,用L298N来做为电机的驱动芯片。
4.寻迹传感器模块
方案1:采用发光二极管+光敏电阻,该方案缺点:易受到外界光源的干扰,有时甚至检测不到黑线,主要是因为可见光的反射效果跟地表的平坦程度、地表材料的反射情况均对检测效果产生直接影响。克服此缺点的方法:采用超高亮度的发光二极管能降低一定的干扰,但这又会增加检测系统的功耗。
方案2:脉冲调制的反射式红外发射接收器。由于采用带有交流分量的调制信号,则可大幅度减少外界的干扰;此外红外发射接收管的工作电流取决于平均电流,如果采用占空比小的调制信号,在平均电流不变的情况下,瞬时电流很大(50~100mA)(ST-188允许的最大输入电流为50mA),则大大提高了信噪比。此种测试方案反应速度大约在5us。
方案3:采用CCD传感器,此种方法虽然能对路面信息进行准确完备的反应,但它存在信息处理满,实时性差等缺点,因此若采用CCD传感器,无疑会加重单片机的处理负担,不利于实现更好的控制策略。
根据以上分析我们采用方案2
5.控制器模块
方案1:采用凌阳的SPCE061A小板作为主控制芯片,而且可以采用凌阳的小车模组,可以很快的完成其基本功能,当是用该小板存在在一定的局限性,较难扩张功能,而且各个模块的拼凑,没有比集成在一块板的稳定性高。
方案2:采用AT89S52作为主控制芯片,该芯片有足够的存储空间,可以方便的在线ISP 下载程序,能够满足该系统软件的需要,该芯片提供了两个计数器中断,对于本作品系统已经足够,采用该芯片可以比较灵活的选择各个模块控制芯片,能够准确的计算出时间,有很好的实时性。
基于以上分析,我们选择了方案2
二,采用AT89S52作为电动车的主控制芯片。
6.电源模块
在本系统中,需要用到的电源有单片机的5V,L298N芯片的电源5V和电机的电源7—15V。所以需要对电源的提供必须正确和稳定可靠。
方案1:用9V的锌电源给前、后轮电机供电,然后使用7805稳压管来把高电压稳成5V 分别给单片机和电机驱动芯片供电。这种接法比较简单,但小车的电路功耗过大会导致后轮电机动力不足。
方案2:采用双电源。为了确保单片机控制部分和后轮电机驱动的部分的电压不会互相影响,要把单片机的供电和驱动电路分开来,,即:用6节干电池7.2V来驱动电机芯片,然后用7805稳压管来稳成5V供给单片机,后轮电机的电源用3V供电,这样有助于消除电机干扰,提高系统的稳定性。
基于以上分析,我们选择了方案二。
7.最终方案
二、系统总体设计:
1.系统工作原理及功能简介:本系统利用单片机AT89S52单片机作为本系统的主控模块,该单片机可以将从传感器的输出信号得到外界的信息,然后在程序中控制单片机对电动车上的直流电机的输出,从而实现电动车的前进以及转弯等循迹行驶。
2.系统框架图
3.理论分析与计算
4.系统主要模块设计:
(1)电源:
为确保小车在行驶过程中各部件均能正常工作且相互之间不受影响,我们可使用了两个电源为两个主要模块提供电压。分别是由转弯电机、单片机和光电传感器组成的总电路电源模块以及后轮驱动电源模块。
(2)转弯与路径出错识别:
小车在行驶过程中会遇到以下两种路况:
①当小车由直道高速进入弯道时,转角方向和车速应根据弯道的曲率迅速做出相应的改变,原则是弯道曲率越大则方向变化角度越大。
②当小车遇到十字交叉路段或是脱离轨迹等特殊情况时,智能车应当保持与上次正常情况一致的方向行驶。
(3)光电传感器:
光电传感分布格局:
路径识别方案:电开关脱离轨道时,等待外面任意一只检测到黑线后,做出相应的转向调整,直到中间的光电开关重新检测到黑线(即回到轨道)再恢复正向行驶。现场实测表明,虽然小车在寻迹过程中有一定的左右摇摆。但只要控制好行驶速度就可保证车身基本上接近于沿靠轨道行驶。
四、系统硬件电路设计
(1)系统整体电路图如下:
(2)光电传感器电路
(3)电源电路
五、软件代码设计
1.软件算法设计:
(1)传感器数据处理及寻迹程序总体流程:
主程序主要起到一个导向和决策功能。其设计思路根据小车所处位置的不同,确定小车的任务。在黑线轨道上走直线时,对传感器的信号进行及时的判断,左边信号为零时控制电
机左转,右边为零时控制电机右转。在弯道时,为了不冲出轨道,是左轮一直打偏,直到检测到右边信号为零时控制电机右转,当右信号为1时,继续使左轮一直偏。
(2)具体流程分析:
智能小车采用4个光学传感器置于小车前部,以此判断如何控制舵机转向.
程序不停判断0~3传感器的值,当SENSOR1==1与SENSOR0==0时,小车为图(I)情况,此时应控制舵机向右转,调用TurnRight()函数;当SENSOR0==1与SENSOR1==0时,小车为图(II)情况,此时应控制舵机向右转,调用TurnLeft()函数.
(I) (II)
但由于传感器比较灵敏,经实际测试,白色区域中可能存在杂色,传感器有可能扫描到白色区域中的黑色(如下图),为了避免判断错误,再没检测到需要转右或者转左后,进行延时,接着再次判断此时传感器情况,如果仍然为SENSOR1==1与SENSOR0==0(或者SENSOR0==1与SENSOR1==0)则可能判断在黑色跑道上,接着调用转右(转左)函数.不过,仍然有一定几率判断失误,当延时后,传感器刚好经过另一个杂色的情况,解决方法有待完善.
当前后传感器都为1(黑)时(如下图(III)),则认为小车在黑色跑道上,不需要进行转向,调RecoverBalance()函数,恢复平衡位置.
当前后传感器都为0(白)时(如下图(IV)),则认为传感器将离开跑道范围,为了另小车继续延黑色跑道行走,程序中的pre_dir变量保存最近一次转向方向(1为右,0为左),此时凭此变量来维持小车的转向.
2.主程序流程图:
3. 具体代码分析:
//宏定义电机、舵机的输入端
#define ELE_MACHINER1_IN1 P0_0//舵机输入端口1
#define ELE_MACHINER1_IN2 P0_1//舵机输入端口2
#define ELE_MACHINER1_EN P2_7//舵机使能端
//宏定义光电传感器元件0至3
#define SENSOR_INPUT P2 //光电传感器总端口(逆时针排序)
#define SENSOR0 P3_0 //前传感器0
#define SENSOR1 P3_1 //右传感器1
#define SENSOR2 P3_2 //左传感器2
#define SENSOR3 P3_3 //后传感器3
/*平衡函数*/
void RecoverBalance()
{
ELE_MACHINER1_IN1 = 0;//控制舵机平衡
ELE_MACHINER1_IN2 = 0;
}
/*转左函数*/
void TurnLeft()
{
char i = 50;
while(i--)
{
ELE_MACHINER1_IN1 = 1;//控制舵机左转 ELE_MACHIN
ER1_IN2 = 0;
}
}
/*转左函数*/
void TurnRight()
{
char i = 50;
while(i--)
{
ELE_MACHINER1_IN1 = 0;//控制舵机右转
ELE_MACHINER1_IN2 = 1;
}
}
/*主函数*/
void main(void)
{
uchar pre_dir=0; //保存先前转向 1为右,0为左
system_initial(); //系统开机初始化
ELE_MACHINER1_IN1=0; //舵机输入端口1
ELE_MACHINER1_IN2=0; //舵机输入端口2
ELE_MACHINER1_EN=1; //舵机使能端
while(1) /* 循环判断 */
{
/* 如果右传感器为1(黑),且左传感器为0(白),则可能需要向右转 */ if(SENSOR1 == 1 && SENSOR2 == 0)
{
delay(2); /* 延时,再次判断,防止赛道杂色 */
if(SENSOR1 == 1 && SENSOR2 == 0)
{
TurnRight(); /* 调用右转函数 */
pre_dir = 1; /* 将pre_dir置1(右) */
}
}
/* 如果左传感器为1(黑),且右传感器为0(白),则可能需要向左转 */
else if(SENSOR2 == 1 && SENSOR1 == 0)
{
delay(2); /* 延时,再次判断,防止赛道杂色 */
if(SENSOR2 == 1 && SENSOR1 == 0)
{
TurnLeft(); /* 调用左转函数 */
pre_dir = 0; /* 将pre_dir置0(左) */
}
}
/* 如果前传感器为1(黑),且后传感器为1(黑),则小车在黑线路径上,不需要转向 */
else if(SENSOR0 == 1 && SENSOR3 == 1)
{
RecoverBalance();
}
/* 如果前传感器为0(白),则可知前面弯度比较大或者小车已出黑线,则根据先前转向转向 */
else if(SENSOR0 == 0)
{
if(pre_dir) /* 定义变量pre_dir保存最近一次转向方向*/
{
TurnRight();
}
else
{
TurnLeft();
}
}
}
}
六、系统功能测试
测试设备:自制跑道、比赛方提供跑道、秒表、
过程分析:基本功能,扩展功能及其他功能
自制跑道测试:
自制跑道上的成功率为80%,测试表明在电量偏小,载重中等时成功率最好比赛使用跑道测试
在比赛使用赛道上,虽然成功率较低,在一个360度弯上有出界现象,不过真题成功率也有75%。
测试数据与结果分析
通过多次测试数据,本自动识别路径的智能小车的性能指标及实现功能如下:
1、在规定的时间内小车可完成往返全程路;
2、在不同配重物的情况下,小车达到的平衡度有一定的误差;
3、小车可寻迹运行;
调试过程与分析
硬件调试
软件调试
智能小车的路径识别问题
智能小车的路径识别问题 摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。 关键词:智能小车;路径识别;面阵CCD摄像器件 Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool. Key words:smart car; Path recognition; Surface array CCD camera device 0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车 行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。实现该 功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动 模块组成。路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块 组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个 方面进行相应的分析和介绍。 1 光电传感器 1.1 反射式红外发射接收器 半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。不同颜色的物体对光的反射率不同,当发射出的红外光对准黑色物体时,反射的红外线很少,光电二极管不能导通,反之,当对准白色物体时,光电二极管导通[2]。系统的单片机接收到光电二极管的信息根据相应的算法分析出小车此时的位置及位置偏离度,进而控制小车的方向和速度。 光电式传感器是通过对光的测量通过光电元件转化为电信号,并输出有效的输出量,由于外界光电因素的原因导致空间分辨率低是每个红外传感器存在的缺点,因此必须对原始传感器信息进行预处理,取相对值是一种有效解决外界干扰的方法,即将传感器未发射红外线时的A/D转换值进行提取,再与红外线时的转换值取相对值。文献[2]同时也提出了如何根据每个传感器的相对值与传感器位置推断出车模相对于黑色引导线的横向偏移位置。而文献[3]中所描述的方法与文献[2]有异曲同工之妙,文献[4][5]也对光电传感器的路径算法有详细科学的介绍。 1.2光敏电阻阵列传感器 假设光敏电阻阵列布置如图1所示,在智能小车的正前方布置n个光敏电阻( n=1,2,…, 11 ) ,在其质心位置依次紧密排列m个光敏电阻(m=1,2…7),首先测出路径黑色区域和白色区域的光敏电阻值,以通过d点的中心线的交点为原点建立坐标系,两排光敏之间的距离为K,光敏n和n+1且n>6或者(n和n-1且n<6)所测的值分别为黑色区域值和白色区域值,光敏6中心为智能小车的中心线通过点,而光敏d也为其通过点,连接这两点即为智能小车的中心线,则通过小车中心线并与黑色区域光敏值对应的光敏n与光敏m的连线即为所求路径信息。理论上讲,只要有两点就可以确定唯一的直线。
车牌识别系统技术方案
停车场管理系统自动车牌识别计费系统技术方案
目录 1 企业概况 (4) 1.1 公司简介 (4) 1.2 资质证书 (4) 2 概述 (10) 2.1 系统方案总体设计 (10) 2.2 项目背景 (11) 2.3 方案概述 (12) 3 系统介绍 (14) 3.1 车牌识别系统简介 (14) 3.2 系统优势 (15) 3.3 系统组成 (16) 4 主要设备参数性能介绍 (19) 4.1 CA-AB900道闸 (19) 4.2 INEX- TI200 200万高清识别一体机 (20) 4.3 CA-600读卡控制器 (22) 技术参数: (22) 4.4 软件监控界面 (23) 4.5 其他辅件 (23)
5 售后服务 (24) 5.1 保修时间及范围 (24) 5.2 维修及维护服务 (24) 5.3 更新改进服务 (24) 5.4 客户档案,完善产品质量 (25) 6 部分工程案例 (26)
1企业概况 1.1公司简介 北京市仟安科技有限责任公司是设计、研发、生产、销售、服务为一体的高新技术企业。公司凝聚了大批实力雄厚的研发团队和技术团队,凭着对智能化应用领域多年来的积淀和对未来智能化领域发展的导向,为用户提供有价值的产品和服务。 公司经过多年的开发研究,引进国外最先进的高新技术,不断完善自我。主要研发停车场主板软件、生产智能道闸、停车场收费系统、车位引导系统、派车系统、门禁系统、自动检售票系统等安防权限认证、消费认证产品。仟安的智能系统解决方案也已得到客户的全面认可和好评。经国家技术监督部门检验、产品的技术含量及外光造型已达到世界先进水平。现“仟安”产品已遍布全国各大城市及地区,并已成功销往海外。 公司以“冲破束缚,发展无限”为企业宗旨,积极引领核心技术创新,不断为全球用户创造完美产品。逐渐形成了“开拓、创新、共赢、务实”的企业文化,建立了朝气蓬勃的精英团队。 公司自创建以来,一直保持了高速发展态势,现已成为国内停车场系统服务领域的领跑者,致力于成为中国领先的安防服务品牌。 1.2资质证书
车牌自动识别管理系统使用说明书
停车场收费管理系统 说 明 书
目录 第1章产品介绍 (3) 1.1 一用户需求分析 (4) 1.2 对不同光照的适应能力 (5) 1.3 对闯关车辆和超低速行驶车辆的适应能力 (5) 1.4 系统工作流程 (5) 1.5 车牌识别系统安装图示 (6) 1.6 识别系统技术参数 (7) 1.7相关设备 (7) 1.8.1 道闸 (7) 1.8.2 车辆检测器 (15) 1.8.3 高清车牌识别一体摄像机 (17) 1.8.4 自动光圈镜头(INEX-NZ01) (19) 1.8.5 控制模块(PLC) (21) 1.8.6 语音模块 (23) 1.8.7 LED显示屏 (24) 第2章产品使用(收费人员) (24) 2.1岗亭收费员操作指南 (24) 2.2 交接班报表 (29) 第3章操作手册(财务人员) (30) 3.1 财务管理人员报表操作指南 (30) 3.2 财务管理人员进行车辆(月费人员)登记和续期 (32) 3.3数据维护 (34) 第4章应急处理措施 (35) 4.1 常见问题及解决方法 (35) 4.1.1 、通讯不通 (35) 4.1.2 、通讯不稳定(时断时续) (36) 4.1.3 、数据库连接失败不能登陆软件 (36) 4.1.4 、软件运行时出现[Microsoft][ODBC SQL Server Driver][SQL Server]对象名 '******' 无效 (37) 4.1.5 、无监控图像(监控窗口是黑屏或蓝屏) (37) 4.1.6 、出入口不能图像对比或查询记录时图像调不出来 (37) 4.1.7 、查看报表时提示“打印机错误” (38) 4.1.8 、打印报表时提示“报表宽度大于纸的宽度” (38) 4.1.9 、将数据导出到EXCEL时,提示“导出失败” (38) 4.1.10 、无语音提示 (38) 4.1.11 保养与维护 (38) 4.1.12电脑和网络设备 (39) 4.1.13停电后的处理 (39) 4.1.14摄像机故障 (39)
车牌自动识别方案.(DOC)
目录 目录 (1) 第一章设计说明 (2) 一、前言 (2) 二、公司简介 (3) 三、设计思路 (3) 第二章系统概述 (5) 一、系统的组成 (5) 二、系统的特点 (5) 三、技术参数 (5) 第三章系统工作流程图、配置图 (6) 一、流程图 (6) 二、入场流程图: (6) 三、出场流程图: (7) 第四章系统主要产品简介 (9) 一、自动快速道闸 (9) 二、数字式车辆检测器 (9) 三、出、入口控制机 (9) 第五章车牌自动识别简介 (10) 一、车牌识别系统的施工定位及安装 (10) 二、车牌识别技术参数 (12) 第六章系统软件功能简介 (13) 一、管理功能设定 (13) 二、系统自维护功能: (16) 三、理财功能: (16) 四、系统软件组成: (17) 五、系统软件特点: (17)
第七章售后服务 (17) 一、咨询服务 (17) 二、维修服务 (17) 三、更新服务 (18) 第一章设计说明 一、前言 首先感谢贵公司对我公司的信任,让我们参与小区停车场的智能管理收费系统设计、选型工作。随着中国经济的高速发展,汽车增长迅猛,出现了停车难、管理难的社会问题,同
时,人们的居住与办公环境也在不断改善,智能大厦、小区已逐步开始普及。在智能大厦、小区的规划建设中,有一个非常重要的内容,就是停车场的智能化、现代化管理系统的建设。一个好的停车场除了必须有合理的交通设施组织规划外,还应具备先进的硬件管理设备,以保证车辆进出快捷顺畅、安全有序;同时还需要完善的管理软件,以保证管理科学、收费公正合理、资金不流失,以维护消费者的合法权益,保护投资者的利益。基于目前现状,我公司已研制开发出具有先进科学水平的停车场管理系统以供选择。 二、公司简介 公司具有独立的法人资格,在停车场智能化管理系统和停车场交通设施行业中,是全国最具有规模的专业公司,从研发设计、生产、销售、施工、服务,每个环节都是我公司自行完成,采用材料保证质量,符合国家标准。自成立以来,上海丽装秉承技术领先优势,在停车场智能管理系统的软、硬件方面,已经突破了芯片、集成电路、控制系统、软件开发等一大批系统设备国产化的技术瓶颈,开发出了拥有自主知识产权的智能电动道闸,入口控制机和读卡控制机,系统管理软件及联网管理软件,图象处理软件,自动出卡机构、入口控制机外观、读卡控制机外观、智能电动道闸等外观设计;“停车场智能设备、交通设施”均被中国技术监督情报协会确认为“中国质量过硬服务放心信誉品牌” 三、设计思路 1、项目概况:该项目的停车场有6个出入口,设计为3进3出。根据停车场的使用和管理要求,保证车辆安全、快捷的进出、停泊,完整的记录车辆进出的各类数据,提高停车场管理的智能化程度,确实完善该项目的配套服务功能是本次方案深化设计的主要出发点。 2、依据规范: 1、《智能建筑设计标准》GB/T50134-2000 2、《民用建筑电气设计规范》JGJ/T16-92 3、《安全防范工程与要求》GA/T75-94 4、《防盗报警控制器通用技术条件》GBI2663-90 5、《建筑电气工程施工质量验收规范》GB50303-2002 6、《智能建筑工程质量验收规范》GB50339-2003 3、管理模式:鉴于项目的实际情况,我们将车库设计为1进1出的车牌自动识别管理模式,将出口控制机、出口管制自动道闸设置在出口通道的直通道起步位置,在抓拍车牌时要
停车场车牌自动识别系统工作原理
近几年,一遇假期堵成狗,已成为中国现代交通的常态,为了改善这种现状,各地高速设置ETC专用通道,不少出行者反应,在ETC实现全国联网之后,使用ETC通道过高速收费站比以往减短的时间少了不止10秒钟,这也成为减少高速拥堵情况的一大原因。 ETC通道能实现快速汽车快速通过,自动栏杆机功能的重要性不言而喻,但是车牌自动识别技术也发挥不可替代的作用。近年来,车牌自动识别技术已被广泛应用于城市智能交通系统中,如闯红灯抓拍、超速行驶违章抓拍以及交通治安卡口系统等,尤其是交通治安卡口系统,其作为治安刑侦管理的重要科技手段之一,对车牌自动识别技术提出了更高的要求,促进了车牌自动识别技术的快速发展。 车牌识别技术(LicensePlateRecognition,LPR)是以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符,并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。 与传统的射频卡刷卡管理系统相比,车牌自动识别系统最大的优点是:第一、可以完全实现无干扰、不停车通行;第二、真正实现车辆一车一杆的通行管理要求,杜绝传车卡互换情况的发生;第三、实现车场管理收费的完全电脑化记录、统计,最大程度减少了停车费用的流失。
车牌自动识别流程 系统前端采用了嵌入式高清一体化摄像机,可实现百万级分辨率的视频和图片码流输出,内置了高性能DSP芯片,支持内置智能算法、可实现视频检测、车牌自动识别等功能。采用了动态视频识别技术,实现对视频流每一帧图像进行识别,从而达到增加识别比对次数,大大提高了识别的效率和准确率。 车辆牌照的自动识别主要是基于图像分割和图像识别理论,对含有车辆号牌的图像进行分析处理,从而确定牌照在图像中的位置,并进一步提取和识别出文本字符。 识别的具体步骤分为车牌定位、车牌提取、字符识别。在自然环境中,相机首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图象中分割出来。 完成牌照区域的定位后,再将牌照区域分割成单个字符,然后进行识别,车牌识别算法采用基于模板匹配算法,首先将分割后的字符二值化,并将其尺寸大小缩放为字符数据库中模板的大小,然后与所有的模板进行匹配,最后选最佳匹配作为结果,通过这种多次比对的
车牌自动识别管理系统方案)
百万咼清车牌自动识别管理系统 技 术 方 案
第1章前言 随着现代化管理手段的进步和科学技术的日益发展,用户对停车场管理的要求越来越 高。过去的人工管理方式已经不适应现代化发展的需要,针对目前快节奏,高速度的工作模 式,要求管理方法和制度要有一个根本的改善,这种改善不但要适应用各种特殊停车场、大院及政府机关的需求,也要适应社会的需求,要适应人的感官的需求和习惯性操作的需求。 但是目前任何高科技产品都不能完全代替人类的手工操作,不能完全取代人的思维,更不能 与人的思维方式相吻合。因此我们在做自动化管理系统的设计时,要尽可能地强调自动化手段,但又不可忽略人工干预的因素,二者巧妙地结合起来,可达到事半功倍的效果。 本设计方案就是基于以上的思想基础,针对停车场、大院管理的实际情况,结合各种现 代化高科技手段完成的。 我们的目标是为用户的停车场车辆管理提供一个车牌识别功能的解决方案。我们采用的是当前国内最先进的车牌识别技术。此设计方案着重考虑了识别的准确性,及车牌自动识别器在各种停车场车辆管理系统中的灵活嵌入,既考虑到用户的需求,又囊括了各种高科技技 术,而且增加了一些管理手段,尽可能地为用户提供完善一个的停车场车辆管理系统。
第2章用户需求分析 在现代化停车场管理中,涉及到各方面的管理,其中车辆的管理是一个重要的方面。 尤其是对特殊停车场、商业性停车场、大院及政府机关而言,要求对各种车辆实时地进行严格的管理,对其出入的时间进行严格的监视,并对各类车辆进行登记(包括内部车辆和外部 车辆)和识别,如为内部车辆则正常放行,如外部车辆则需要进行记录、检查后做出放行或阻挡的处理或者将作为时租车,并将各种信息输入到数据库。对大规模的营区中,各种出入的车辆较多,如每辆车都要进行人工判断,既费时,又不利于管理和查询,保卫工作比较困难,效率低下。为了改善这种与现代化停车场、大院及政府机关等不相称的管理模式,需要尽快实现停车场保安工作的自动化、智能化,并以计算机网络的形式进行管理,对所有出入口的车辆进行有效地、准确地监测和管理。要求系统提供相应的应用软件,实现营区管理的高效率、智能化。 对一些已建停车场而言,已具备了一套车辆管理系统,而对一些新建停车场而言,一切 从头开始,尚未搭建起任何计算机管理系统,需从整体上来考虑。故在此技术方案中,我们 将着重考虑KD-BXG01车牌自动识别器在车辆管理系统中的使用。对已建停车场,用户可以充分利用原有投资的基础上提高整个管理系统的智能化、自动化程度;同样,对新建停车场, 车牌自动识别器也可运用于新的管理系统的设计中。车牌识别作为其中一个极其重要的模块 和功能,对于整个网络结构的构筑,数据库的管理及查询、打印等其他功能,本设计方案中 将不作重点阐述,而把这一工作留给系统集成商来完成。 该系统是利用车牌自动识别器,入场车辆不需停车的一种新型无障碍入场停车场管理系 统。司机不需要在出入口停车,当车辆进入停车场入口时,KD-BXG01车牌自动识别器自动 抓拍车辆照片并识别车牌号码,将车牌号码,颜色,车牌特征数据,入场时间信息等传给管理计算机,车辆可无障碍进入停车场,为用户提供了一种崭新的服务模式。 系统自动识别进入停车场车辆的号码和车牌特征,验证用户的合法身份,自动比对黑名 单库,自动报警,并可对整个停车场情况进行监控和管理,包括出入口管理,内部管理,采集,存储数据和系统工作状态,以便管理员进行监控,维护,统计,查询和打印报表等工作。 车辆出入停车场,完全处于系统监控之下,使停车场的出入,收费,防盗,车位管理完全智能化、自动化并具有方便快捷,安全可靠的优点. 其主要特点如下: 识别系统对环境的依赖性降低至最低程度,可实现全天候正常工作,且识别率保持 较高水平。 基于DSP高速件识别系统提高了识别的速度和准确性。 可识别的最小号牌宽度为85个像素,监控与识别摄像机可以共用,有效地保护客户 投资。 适应复杂的气候及光照条件,如阴天、雨天、晚上仍可保证高识别率。 适应高速大流量,车速在120至180km/h,单车道流量为30辆/分钟时仍可保证高识
基于摄像头的最佳道路识别及赛车控制算法 飞思卡尔
基于摄像头的道路识别及赛车控制算法 杨运海周祺吕梁 摘要:本文探讨了摄像头在智能车道路识别中的应用,并提出了一种通用的控制算法。在准确采集图像的基础上,利用临近搜索法对有效道路信息进行快速提取,通过分析赛道信息,计算出赛道黑线的走向趋势及赛车当前位置。在充分考虑当前和过去的赛道信息的基础上,对赛道类型进行判断及分类。在综合考虑赛道类型,黑线走向及车当前位置,对舵机的转向和电机的速度进行精确控制。 关键词:图像采集;临近搜索;转向控制,速度控制 1.概述 在飞思卡尔智能车汽车比赛中,路径识别方法主要有两大类,一类是基于红外光电传感器,令一类是基于摄像头。通常,红外光电传感器安装灵活,原理简单,可靠性好,不易受环境光干扰,因而得到了广泛应用,但其对前方道路的预判距离非常有限,不适宜赛车高速行驶。另一类是基于摄像头,与光电传感器相比,其优点非常明显,能提前获取大量前方道路信息,有利于实现赛车的最优控制。但其缺点是图像采集要求有高的AD转换频率,图像处理算法复杂度高,且容易受环境光的干扰。考虑到摄像头的优点远大于其缺点,因此选择了摄像头。以下是摄像头的工作流程图: 图B-1 摄像头工作流程
摄像头控制赛车行驶方案有三大模块:图像采集、赛道信息提取、转向和速度控制。 2.图像采集 考虑到S12的运算能力,我们采用了黑白制式、320*240的CMOS单板摄像头。摄像头出来的是模拟信号,每秒有50场图像,场之间有场消隐信号,行之间有行消隐信号,经过lm1881分离后,可得到场同步信号和行同步信号,作为行中断信号。由于行中断中要采集该行的信号,对时间要求很严格,其中断优先级应比普通中断的优先级高,因此我们选择IRQ作为行同步信号输入口,PT0作为场信号输入口。此外,为保证图像不丢失,我们仅对场信号的下降沿进行捕捉。 图B-2 摄像头视频信号 按照目前车的刹车时的加速度,我们选定图像拍摄最远处为前方1米就足以对速度做出了控制。考虑到前轮到前方20cm为摄像头的盲区,故有效拍摄范围为0.8m,为了保证不丢失起跑线,每2.5cm至少拍摄一行,故一幅图像至少采集32行。为了稳妥起见,我们选择了ROW=45行。摄像头最前方拍摄的宽度为80cm,而黑线宽度为2.5cm,故一行至少采集32,为了稳妥起见,一行采集的点数定为COL=45个点。 正常情况下,S12的AD频率不能超过2M,转化一个点需要14个周期,如果不超频,一行将只能采集8个点(24M主频时)。将分频系数设为0,此时AD 频率为12M。在行采集过程中,我们通过查询方式来判断AD是否转换完成,并对AD转换时间进行了记录,发现记录到的时间恰是期间指令执行一次的时间,这表明,影响一行采集的点数已不是AD的频率,而是执行指令的时间,因此采集过程中不需要查询A TDSTA T0的标志位,只需要通过执行一定数量的NOP空操作指令延时即可。例如采集47个点需要时,每个点的时间间隔是53us/47=1.125us,对应的指令周期数为1.125*24=27。通过反编译知读写等指令本身有13个指令周期,故令加14个NOP指令即可实现。 由于摄像头的角度关系,拍摄是不均匀的,而是前方疏,近处密。为了保证采集的均匀,采集的行之间间隔的行数就不能相同。摄像头的有效行数为285行左右,具体关系如下表: 行采集计数器line 摄像头行计数器row 备注 0 0 每3行采集一行
车牌自动识别系统方案
车牌自动识别停车场管理系统 设 计 方 案 xxx科技有限公司 地址: 电话:手机:
网址: QQ: 智能停车场解决方案 景第一章背 随着我国机动车增长速度的加快,停车场管理系统已经被广泛的应用起来,使车辆管理更加科学化,正规化。经过几年的推广应用,在广泛使用的同时,也发现了一些弊端和漏洞 一、月租卡与车无法准确对应 现有系统,当月租用户刷卡出入车场时,无法自动判定该卡是否对应该车,这样就造成了,用户卡片随意互借,丢失计时卡,车辆数目不准确,用不法手段获取他人月租卡进行高档车辆盗窃的严重安全隐患。 二、临时卡无法自动录入车牌 现有系统,当临时卡用户进入车场时,无法自动在数据库中存储牌照号,这样在查询停车场中某辆临时停放车辆的进出情况时,会变得非常麻烦,无法快速查找。需要依次调取所有进入车辆图片进行人工辨别。同时也无法对离场临停车辆进行车牌和卡片的双重验证,同样也存在安全隐患。 三、车辆进出效率低下。 现在小区规模越来越大,业主车辆越来越多,在经过停车场管理系统刷卡验证时,经常会出现业主找卡,忘记带卡,刷卡时无法靠边的情况,这样就严重影响了通行速度,造成车辆拥堵。在上下班高峰期的时候这种情况尤其严重。 针对以上的系统弊端和漏洞,我公司通过多年的技术研发和验证测试,推出了目前最先进的车牌自动识别系统,作为停车场系统的子系统,通过计算机的图像处理自动识别记录车牌,辨别同一车牌的车辆出入场时是否一致,是目前识别速度最快的车牌识别系统。其软件模块可以嵌入到停车场系统软件中,配合硬件共同实现车牌自动识别功能,使停车场系统更加完善精确。 在智能交通系统中,车牌自动识别系统是一个非常重要的发展方向,车牌自动识别系统正是在这种应用背景下研制出来的能够自动实时地检测车辆经过和识别汽车牌照的智能交通管理系统。 第二章关于车牌识别技术
单目视觉智能车路径识别及控制策略
单目视觉智能车路径识别及控制策略研究* 陈启迅 薛 静 (西北工业大学自动化学院 西安710072 )摘 要 研究了基于CMOS摄像头的图像采集方法,以及智能车赛道路径识别。提出了自适应差分边缘检测算法,采用取点求面积的方法提取指引线的相关参数。自适应差分边缘检测算法是在一般的边缘检测算法的基础上提出的,它能根据提取的左右边缘存在情况调整搜索范围、阈值,以及差值的求取方法。使用海伦公式求指引线上所取的三角形的面积, 据此提出了1种基于三角形面积的智能车速度控制方法,此方法以指引线上的三角形面积反映赛道的弯曲程度,并以此作为智能车速度控制的控制变量。 关键词 自适应差分边缘检测;智能车;图像采集;海伦公式 中图分类号:TP301.6 文献标志码:A doi:10.3963/j .issn 1674-4861.2012.05.006收稿日期:2012-07-04 修回日期:2012-09- 07 *西北工业大学研究生创业种子基金项目( 批准号:Z2011047)资助第一作者简介:陈启迅(1984),硕士生.研究方向:控制工程、系统工程.E-mail:cq x062014@126.com0 引 言 智能车辆系统是1个拥有感知环境能力,具备规划决策能力以实现自动行驶,并且可以实现多等 级辅助驾驶等功能于一体的综合系统[ 1 ]。与很多学科有着密切关系,如计算机、控制、通信、图像处 理、人工智能、信号处理等,同时也是多种传感器融 合的载体。因为它一般集中了摄像机、GPS、超声波雷达、激光雷达等多种传感器来感知周围环境, 并根据多传感器融合所获得的道路、车辆状态和障碍物信息进行控制车辆的转向和速度,从而使得车辆安全、可靠、稳定地在道路上行驶,因此智能车辆 是多学科综合于一体的高度智能化的产物[ 2- 3]。文献[4] 中介绍了一般差分边缘检测算法。文献[5 ]中描述了基于序列图像运动分割的车辆边界轮廓提取算法。文献[6]中提到了道路裂纹线检测中的脊波域图像增强算法。选用功耗低、前瞻性好的CMOS摄像头作为路径识别视觉传感器,采用自适应差分边缘检测算法有效地提取道路指引线,此算法具有很高的灵活性和适应能 力, 能够有效地降低干扰。进一步使用取点求面积的方法获取指引线参数。 1 视觉图像采集 1.1 硬件实现 CMOS视觉传感器图像采集电路[7] 见图1 ,LM1881可以实现视频同步信号的分离。2脚为视 频信号输入端;3脚和5脚分别为场同步、行同步信号输出端;7脚为奇偶场同步信号输出端,在此不使用。视频信号同时接入微处理器AD转换口 。 图1 视频同步信号分离电路 Fig.1 The circuit for separation of sy nchronizationsig nal of video1.2 软件实现 视频信号采集流程[8] :首先等待场信号的到 来;然后延时,跳过场消隐,约1.44ms;等待行同步信号;判断采集行数是否满足要求,满足则采集完成,否则延时,跳过行同步信号和消隐信号;对1行视频信号进行连续采集; 延时,跳过若干行视频信号,再跳回到等待行同步信号,直至完成,就能采集到1幅有效而完整的视频图像了。 2 自适应差分边缘检测算法 阈值分割法[9- 10]在结构化道路上是提取指引 4 2交通信息与安全 2012年5期 第30卷 总171期
智能车牌识别系统
智能车牌识别系统 智能车牌识别系统是采用车牌识别技术做为基础,应用与停车场、高速路口、收费通道等场所的车辆管理系统。车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆车牌信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。 随着社会经济的发展、汽车数量急剧增加,对交通控制、安全管理、收费管理的要求也日益提高,运用电子信息技术实现安全、高效的智能交通成为交通管理的主要发展方向。汽车车牌号码是车辆的唯一“身份”标识,智能车牌识别系
统可以在汽车不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合。 智能车牌识别系统的几种应用方式: 1、监测报警 对于纳入“黑名单”的车辆,例如:被通缉或挂失的车辆、欠交费车辆、未年检车辆、肇事逃逸及违章车辆等,只需将其车牌号码输入到应用系统中,智能车牌识别设备安装于指定的路口、卡口或由执法人员随时携带按需要放置,系统将识读所有通过车辆的车牌号码并与系统中的“黑名单”比对,一旦发现指定车辆立刻发出报警信息。系统可以全天不间断工作、不会疲劳、错误率极低;可以适应高速行驶的车辆;可以在车辆行使过程中完成任务不影响正常交通;整个监视过程中司机也不会觉察、保密性高。应用这种系统将极大地提高执法效率。 2、超速违章处罚 车牌识别技术结合测速设备可以用于车辆超速违章处罚,一般用于高速公路。具体应用是:在路上设置测速监测点,抓拍超速的车辆并识别车牌号码,将违章车辆的车牌号码及图片发往各出口;在各出口设置处罚点,用智能车牌识别设备识别通过车辆并将号码与已经收到的超速车辆的号码比对,一旦号码相同即启动警示设备通知执法人员处理。与传统的超速监测方式相比,这种应用可以节省警力,降低执法人员的工作强度,而且安全、高效、隐蔽,司机需时刻提醒自己不能超速,极大地减少了因超速引发的事故。 3、车辆出入管理 将智能车牌识别设备安装于出入口,记录车辆的车牌号码、出入时间,并与自动门、栏杆机的控制设备结合,实现车辆的自动管理。应用于停车场可以实现自动计时收费,也可以自动计算可用车位数量并给出提示,实现停车收费自动管理节省人力、提高效率。应用于智能小区可以自动判别驶入车辆是否属于本小区,对非内部车辆实现自动计时收费。在一些单位这种应用还可以同车辆调度系统相结合,自动地、客观地记录本单位车辆的出车情况。
飞思卡尔智能车黑线识别算法及控制策略研究
智能车黑线识别算法及控制策略研究 时间:2009-05-1811:23:07来源:电子技术作者:北京信息科技大学,机电工程学院张淑 谦王国权 0引言 “飞思卡尔”杯全国大学生智能车大赛是由摩托罗拉旗下飞思卡尔公司赞助由高等学校自动化专业教学指导委员会负责主办的全国性的赛事,旨在加强大学生的创新意识、团队合作精神和培养学生的创新能力。此项赛事专业知识涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,对学生的知识融合和动手能力的培养,对高等学校控制及汽车电子学科学术水平的提高,具有良好的推动作用。 智能车竞赛所使用的车模是一款带有差速器的后轮驱动模型赛车,它由大赛组委会统一提供。自动控制器是以飞思卡尔16位微控制器MC9S12DGl28(S12)为核心控制单元,配合有传感器、电机、舵机、电池以及相应的驱动电路,它能够自主识别路径,控制车高速稳定运行在跑道上。比赛要求自己设计控制系统及自行确定控制策略,在规定的赛道上以比赛完成的时间短者为优胜者。赛道由白色底板和黑色的指引线组成。根据赛道的特点,比赛组委会确定了两种寻线方案:1.光电传感器。2.摄像头。 两种寻线方案的特点如下: (1)光电传感器方案。通过红外发射管发射红外线光照射跑道,跑道表面与中心指引线具有不同的反射强度,利用红外接收管可以检测到这些信息。此方案简单易行程序调试也简单且成本低廉,但是它受到竞赛规则的一些限制(组委会要求传感器数量不超过16个(红外传感器的每对发射与接收单元计为一个传感器,CCD传感器计为1个传感器)),传感器的数量不可能安放的太多,因而道路检测的精度较低,能得到指引线的信息量也较少。若采用此方案容易引起舵机的回摆走蛇形路线。 (2)摄像头方案。根据赛道的特点斯用黑白图像传感器即可满足要求。CCD摄像头有面阵和线阵两种类型,它们在接口电路、输出信号以及检测信息等方面有着较大的区别,面阵摄像头可以获取前方赛道的图像信息,而线阵CCD只能获取赛道一条直线上的图像信息。摄像头方案的所能探测的道路信息量远大于光电传感器方案,而且摄像头也可以探测足够远的距离以方便控制器对前方道路进行预判。虽然此方案对控制器的要求比较高,但组委会提供的MC9S12DGl28(S12)的运算能力以及自身AD口的采样速度完全能够满足摄像头的视频采样和大量图像数据的处理的要求。 本文就是在摄像头方案的前提下,在实时的图像数据获取的基础上对图像信息进行数据处理,从而提取赛道中心的黑色指引线,再以此来作为舵机和驱动电机的控制依据。 1摄像头采样数据的特点 采用的黑白摄像头的主要工作原理为:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出,见图1。摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如O.3V),并保持一段时间。这样相当于紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉
基于MATLAB的汽车牌照自动识别系统设计
1引言 随着我国交通迅速发展,人工管理方式已经逐渐不能满足实际的需要,微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。汽车牌照的自动识别技术已经得到了广泛应用。通过对车辆牌照的正确认识,不仅可以实现交通流量的统计和查询,道路负荷的测定和管理,而且可以对肇事车辆、走私车辆、丢失车辆进行辨识和追查。传统的方法是在设定的路口派专人进行观察和笔录,因此工作强度大、统计繁杂、效率低、准确性差。因而对车辆牌照自动识别技术的研究和应用系统开始具有重要的意义。 汽车牌照自动识别整个处理过程分为预处理、边缘提取、车牌定位、字符分割、字符识别五大模块,其中字符识别过程主要由以下3个部分组成:①正确地分割文字图像区域;②正确的分离单个文字;③正确识别单个字符。 MATLAB是一种强大的数值计算功能的编程工具,在图像处理、信号处理、神经网络中都有着广泛的应用。其数据类型最大的特点是每一种类型都以数组为基础,从数组中派生出来。其所提供的强大的矩阵运算功能。如特征值和特征向量的计算、矩阵求逆灯都可以直接通过MATLAB提供的函数求出。MATLAB还提供了小波分析、图像处理、信号处理、虚拟现实、神经网络等的工具包。其中,图像处理工具包提供了许多可用于图像处理的相关函数。按功能可以分为图像显示;图像文件输入与输出;几何操作;像素值和统计;图像分析与增强;图像铝箔;线性二维滤波器设计;图像变换;领域和块操作;二值图像操作;颜色映射和颜色空间转换;图像类型和类型转换;工具包参数获取和设置等。 基于此,用MATLAB软件编程来实现每一个部分,最后识别出汽车牌照,有很大的优势。在研究的同时对其中出现的问题进行了具体分析,处理。
车牌自动识别系统技术报价方案书
小区车辆进出车牌识别系统 技 术 设 计 报 价 方 案 介 绍
第一章公司简介 公司成立于是2009年,专业从事数字网络视频监控系统、安防监控、楼宇对讲、电子门禁停车场智能管理系统等智能化系统开发的专业公司.承蒙广大用户的厚爱,我公司得加快发展速度,充分发挥已有资源,更多地开展行业用户的服务工作,开创新的发展局面。我公司全体员工愿与社会各界携手共创未来!我们秉承真诚合作精神向广大客户提供相关的系统解决方案,设备销售及技术支持,价格合理,欢迎来人来电咨询、洽谈业务! 第二章背景 随着科技经济的不断发展,汽车开始普及普通的家庭,大量的车辆为停车场的管理带来了新的问题。传统的停车场管理主要通过给进入车场的车辆分发IC卡,记录车辆进出时间,作为计费的主要依据,不管是固定车辆还是临时车辆,进出停车场都必须在出入口停车刷卡后,才能进出停车场,在车辆出入繁忙的时段,这种管理方式往往造成塞车的现象,耽误车主宝贵的时间。针对以上现象,巴州申科商贸有限公司利用车牌识别技术取代传统的IC卡技术,解决车辆进出时必须停下刷卡而造成的停车场进出口塞车现象。
第三章关于车牌识别技术 车牌识别技术以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。 第四章系统建设 1)车辆进入: ①、车辆驶入车牌摄像机抓拍区域,触发地感线圈。 ②、车牌识别系统自动抓拍车辆的的图像并识别出车牌识号,然后通过检索数据库得出车辆类别。 ③、显示屏显示该车的有效期(贵宾车或月租车)或余额(储值车),
车牌号识别解决方案
一、车牌识别背景 随着科技经济的不断发展,人们生活水平不断提高,机动车的数量也在逐年增加,势必会产生一定的停车问题,比如停车难,停车场入出口拥堵,传统停车场管理系统效率低等,为改变目前的停车现状,以车牌识别技术为基础的车牌自动识别技术应运而生。 二、关于车牌识别技术 车牌自动识别技术(License Plate Recognition, LPR)是以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如车牌号码、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符,并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。
三、拓扑图 四、高清车牌识别系统搭建 4.1车牌识别工作原理 高清车牌识别系统采用高清网络摄像机对进入停车场的车辆进行抓拍,上传计算机处理车牌信息,引导车辆进入,保存记录;在停车场出口通过高清网络摄相机对驶出的车辆进行图像抓拍,经计算机自动识别,与数据库中车牌信息对比,对固定车自动放行,对于临时车根据停车时间进行管理,实现车辆的进出监控和管理。 一台电脑能管理一进一出,和多台电脑组成局域网,能实现多进多出的停车场联网管理。入口通过摄像机抓拍图片,经TCP/IP网络上传给本客户端电脑,产生入场记录保存在数据库,出口通过摄像机抓拍图片,由客户端电脑处理识别结果,比对服务器电脑数据库,计算停车时间,根据对应的收费方案计算收费,显示在客户端电脑管理界面,配置语音播报和显示屏显示。
人工智能车牌识别
车牌自动识别 近年来,随着物联网、车联网的迅猛发展,以及中国汽车数量的不断增加,这对智能交通系统提出了新的要求。作为智能交通系统一部分的集成信号处理、计算机视觉、模式识别等技术的车牌识别系统因而也有了新的应用和挑战。除传统的用于高速公路超速违章管理、停车场管理、车辆流量管理以及车辆电子收费系统外,车牌识别系统还可以用于移动机器人对停车场车辆的监管以及交通管理部门对违章车辆车牌的自动登记等。 一、车牌自动识别系统的技术说明 车牌自动识别系统采用车牌识别技术来实现技术效果的。车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。 车牌识别技术结合电子不停车收费系统(ETC)识别车辆,过往车辆通过道口时无须停车,即能够实现车辆身份自动识别、自动收费。在车场管理中,为提高出入口车辆通行效率,车牌识别针对无需收停车费的车辆(如月卡车、内部免费通行车辆),建设无人值守的快速通道,免取卡、不停车的出入体验,正改变出入停车场的管理模式。 汽车牌照号码是车辆的唯一“身份”标识,牌照自动识别技术可以在汽车不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、称重系统、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合。 以下列举了几种应用方式: ——监测报警 对于纳入“黑名单”的车辆,例如:被通缉或挂失的车辆、欠交费车辆、未年检车辆、肇事逃逸及违章车辆等,只需将其车牌号码输入到应用系统中,车牌识别设备安装于指定的路口、卡口或由执法人员随时携带按需要放置,系统将识读所有通过车辆的牌照号码并与系统中的“黑名单”比对,一旦发现指定车辆立刻发出报警信息。系统可以全天不间断工作、不会疲劳、错误率极低;可以适应高速行驶的车辆;可以在车辆行使过程中完成任务不影响正常交通;整个监视过程中司机也不会觉察、保密性高。应用这种系统将极大地提高执法效率。 ——超速违章处罚 车牌识别技术结合测速设备可以用于车辆超速违章处罚,一般用于高速公路。具体应用是:在路上设置测速监测点,抓拍超速的车辆并识别车牌号码,将违章车辆的牌照号码及图片发往各出口;在各出口设置处罚点,用车牌识别设备识别通过车辆并将号码与已经收到的超速车辆的号码比对,一旦号码相同即启动警示设备通知执法人员处理。与传统的超速监测方式相比,这种应用可以节省警力,降低执法人员的工作强度,而且安全、高效、隐蔽,司机需时刻提醒自己不能超速,极大地减少了因超速引发的事故。
小区车牌自动识别管理系统方案
车牌自动识别停车场管理系统 技 术 说 明 深圳市捷精诚科技(机电设备)有限公司
第1章前言 现代化管理手段的不断进步完善,人工刷卡的管理方式已经不适应现代化发展的需要,针对目前快节奏,高效率的管理方式,自动化管理系统的设计正适应当前需求而产生。 我们的目标是为小区用户的车辆管理提供一个车牌识别功能的解决方案。我们采用当前国内最先进的车牌识别技术结合百万高清络网摄像机方案,高识别率手段,尽可能地为用户提供完善的小区车辆管理系统。
第2章用户需求分析 在现代化停车场管理中,涉及到各方面的管理,其中车辆的管理是一个重要的方面。尤其是对特殊停车场、大院及政府机关、小区而言,要求对各种车辆实时地进行严格的管理,对其出入的时间进行严格的监视,并对各类车辆进行登记(包括内部车辆和外部车辆)和识别。对大规模的场区中,各种出入的车辆较多,如每辆车都要进行人工判断,既费时,又不利于管理和查询,保卫工作比较困难,效率低下。为了改善这种与现代化停车场、大院及政府机关、小区等不相称的管理模式,需要尽快实现车辆管理工作的自动化、智能化,并以计算机网络的形式进行管理,对所有出入口的车辆进行有效地、准确地监测和管理。要求系统提供相应的应用软件,实现营区管理的高效率、智能化。 该系统是利用视频流的车牌自动识别算法,无需地感触发,对车辆进行抓拍、号牌识别,当车辆进入小区入口时,车牌自动识别算法自动抓拍车辆照片并识别车牌号码,将车牌号码,颜色,车牌特征数据,入场时间信息等传记录下来,车辆可无障碍出入停车场,为用户提供了一种崭新的服务模式。 系统自动识别进入小区车辆的号码和车牌特征,验证用户的合法身份,自动比对黑名单库,自动报警,并可对整个停车场情况进行监控和管理,包括出入口管理,内部管理,采集,存储数据和系统工作状态,以便管理员进行监控,维护,统计,查询和打印报表等工作。车辆出入小区,完全处于系统监控之下,使小区的出入,收费,防盗,车位管理完全智能化、自动化并具有方便快捷,安全可靠的优点. 其主要特点如下: 识别系统对环境的依赖性降低至最低程度,可实现全天候正常工作,且 识别率保持较高水平。 基于LPR识别系统提高了识别的速度和准确性。 可识别的最小号牌宽度为60个像素 适应复杂的气候及光照条件,如阴天、雨天、晚上仍可保证高识别率。 适应高速大流量,车速在60 km/h,单车道流量为30辆/分钟时仍可保证 高识别率(>95%)。 实现对视频图像的逐帧处理,视频流触发。 工程安装简便、运行稳定,不干扰用户已有系统。 无需地感及车辆检测器,节省成本且施工简单快速,极大的缩短施工时 间。