XXD电机+桨+电池=推力(详细参数表)

型号外形尺寸重量输出轴径:A2208 27.8×21mm36克3/3.17mm
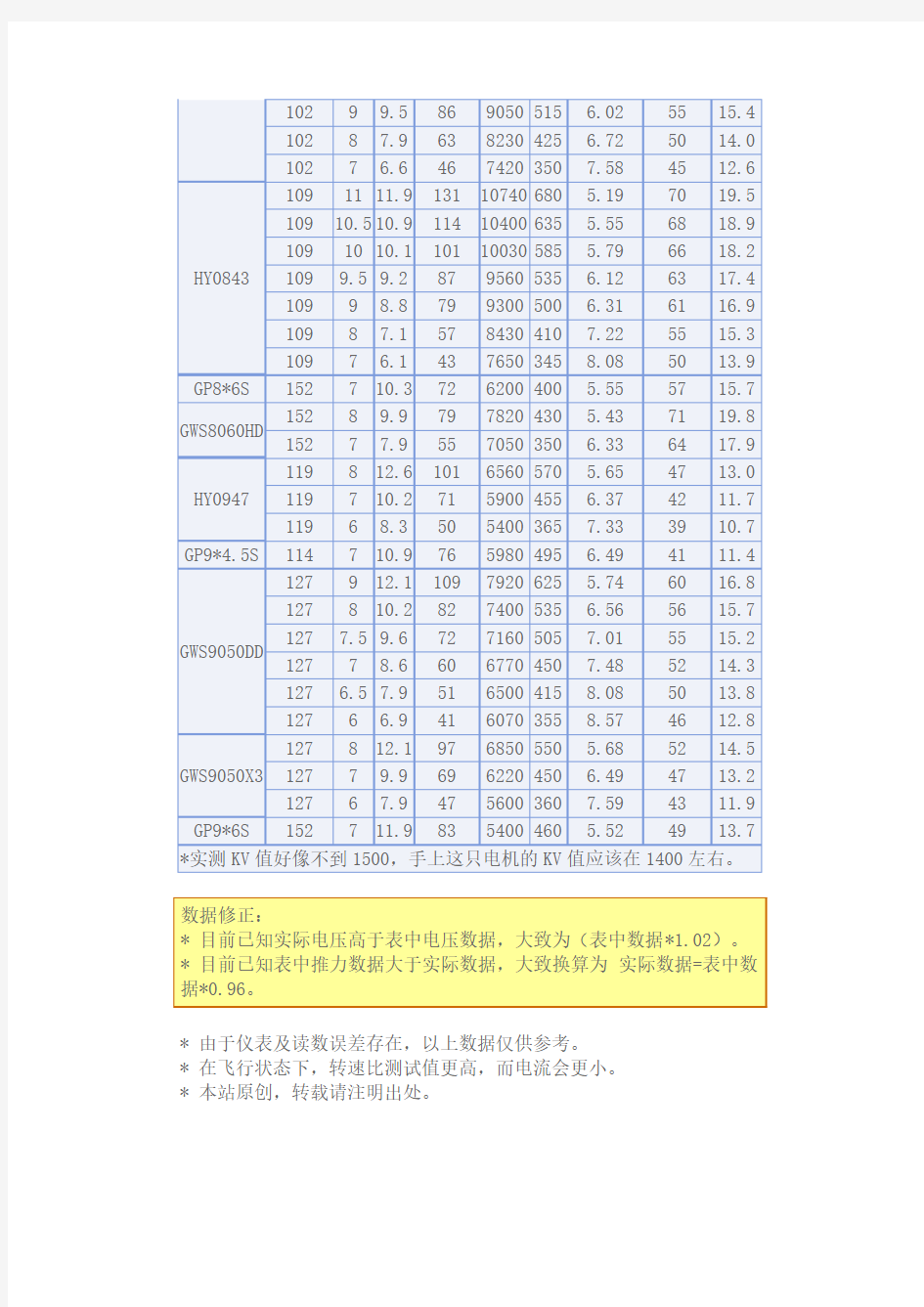
数据修正:
* 目前已知实际电压高于表中电压数据,大致为(表中数据*1.02)。* 目前已知表中推力数据大于实际数据,大致换算为实际数据=表中数据*0.96。
* 由于仪表及读数误差存在,以上数据仅供参考。
* 在飞行状态下,转速比测试值更高,而电流会更小。
* 本站原创,转载请注明出处。
型号外形尺寸重量输出轴径:
A2204 27.8×12mm21克桨保护器一体化
数据修正:
* 目前已知实际电压高于表中电压数据,大致为(表中数据*1.02)。* 目前已知表中推力数据大于实际数据,大致换算为实际数据=表中数据*0.96。
* 由于仪表及读数误差存在,以上数据仅供参考。
* 在飞行状态下,转速比测试值更高,而电流会更小。
* 本站原创,转载请注明出处。
型号外形尺寸重量输出轴径:
A2208 27.8×21mm36克3/3.17mm
型号外形尺寸重量输出轴径:A2208 27.8×21mm36克3/3.17mm
型号外形尺寸重量输出轴径:A2208 27.8×23mm36克3mm/3.17mm
型号 外形尺寸
重 量 输出轴径: A2208U
27.8×21mm
36克
3.17mm
电机常用计算公式和说明
电机电流计算: 对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压 对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流 当电机星接时:线电流=相电流;线电压=根号3相电压。三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏 当电机角接时:线电流=根号3相电流;线电压=相电压。绕组是直接接380的,导线的电流是两个绕组电流的矢量之和 功率计算公式 p=根号三UI乘功率因数是对的 用一个钳式电流表卡在A B C任意一个线上测到都是线电流 极对数与扭矩的关系 n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。所以在选用电机时,考虑负载需要多大的起动扭距。 异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。 直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。 扭矩公式 T=9550*P输出功率/N转速 导线电阻计算公式: 铜线的电阻率ρ=0.0172, R=ρ×L/S (L=导线长度,单位:米,S=导线截面,单位:m㎡) 磁通量的计算公式: B为磁感应强度,S为面积。已知高斯磁场定律为:Φ=BS 磁场强度的计算公式:H = N × I / Le 式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。 磁感应强度计算公式:B = Φ/ (N × Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。 感应电动势 1)E=nΔΦ/Δt(普适公式){法拉第电磁感应定律,E:感应电动势(V),n:感应线圈匝数,ΔΦ/Δt:磁通量的变化率} 磁通量变化率=磁通量变化量/时间磁通量变化量=变化后的磁通量-变化前的磁通量 2)E=BLV垂(切割磁感线运动){L:有效长度(m)} 3)Em=nBSω(交流发电机最大的感应电动势){Em:感应电动势峰值} 4)E=BL2ω/2(导体一端固定以ω旋转切割){ω:角速度(rad/s),V:速度(m/s)}
电动机的选择及设计公式
一、电动机的选择 1、空气压缩机电动机的选择 1.1电动机的选择 (1)空压机选配电动机的容量可按下式计算 P=Q(Wi+Wa) ÷1000ηηi2 (kw) 式中P——空气压缩机电动机的轴功率,kw Q——空气压缩机排气量,m3/s η——空气压缩机效率,活塞式空压机一般取0.7~0.8(大型空压机取大值,小型空压机取小值),螺杆式空压机一般取0.5~0.6 ηi——传动效率,直接连接取ηi=1;三角带连接取ηi=0.92 Wi——等温压缩1m3空气所做的功,N·m/m3 Wa——等热压缩1m3空气所做的功,N·m/m3 Wi及Wa的数值见表 Wi及Wa的数值表(N·m/m3) 1.2空气压缩机年耗电量W可由下式计算 W= Q(Wi+Wa)T ÷1000ηηiηmηs2 (kw·h) 式中ηm——电动机效率,一般取0.9~0.92 ηs ——电网效率,一般取0.95 T ——空压机有效负荷年工作小时
2、通风设备电动机的选择 (1)通风设备拖动电动机的功率可按下式计算 P=KQH/1000ηηi (kw) 式中K——电动机功率备用系数,一般取1.1~1.2 Q——通风机工况点风量,m3/s H——通风机工况点风压轴流式通风机用静压,离心式通风机用全压,Pa η——通风机工况点效率,可由通风机性能曲线查得 ηi——传动效率,联轴器传动取0.98,三角带传动取0.92 (2)通风机年耗电量W可用下式计算 W=QHT/1000ηηiηmηs 式中ηm——电动机效率, ηs ——电网效率,一般取0.95 T ——通风机全年工作小时数 3、矿井主排水泵电动机的选择 (1)电动机的选择 排水设备拖动电动机的功率可按下式计算 P=KγQH/1000η (kw) 式中K——电动机功率备用系数,一般取1.1~1.5 γ——矿水相对密度,N/m3 Q ——水泵在工况点的流量,m3/s H ——水泵在工况点的扬程,m
安川变频器的调试及参数设置表(齐全)
第一部分变频器的操作方法 一、操作面板各部的名称: 图1 操作面板布置 二、操作键的功能: 1.LOCAL/REMOTE:用数字操作器运行(COCAL)和用控制回路端子运行(REMOTE)切换时按下,由参数(o2-01)可设定这个键的有效/无效。 2.MENU:菜单键,按此键可进入参数设置。 3.ESC:按一下ESC键,则回到前一个状态。 4.JOG:操作器运行时的点动运行键。 5.FWD/REV:操作器运行时,运转方向切换键。6.RESET:设定参数数值时,选择操作位;故障发生时,作为故障复位键。
7.增加键:选择方式、组、功能、参数的名称、设定值(增加)时按下此键。 8.减少键:选择方式、组、功能、参数的名称、设定值(减少)时按下此键。 9.DATA/ENTER:各模式、功能、参数、设定值确认时按下此键。 10.RUN:操作器运行时,按下此键起动变频器。11.STOP:操作器运行时,按下此键停止变频器;控制回路端子运行时,由参数(o2-01)可以设定这个键的有效/无效。 三、方式的切换 按(MENU)键,表示驱动方式,然后按↑、↓键切换方式。读取、设定各方式中参数时,按(DATA/ENTER)键。从参数的读取、设定状态返回前一状态时,按(ESC)键。具体操作如下图: 图2 方式的切换
四、操作举例 把加速时间从10.0Sec变更为20.0Sec,请按以下顺序设定参数: 五、在驱动方式下的操作 在驱动方式下,可监视频率指令、输出频率、输出电流、输出电压、输入输出状态等及显示异常内容、异常记录等。 常用监视参数:
图3 驱动方式下的操作方法
安川伺服驱动器全参数表和功能表
安川伺服驱动器参数表 安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。 安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。 Pn000 功能选择 n.0010(设定值) 第0位:设定电机旋转方向;设“1”改变电机旋转反向。第1位:设定控制方式为:“1”位置控制方式。 Pn200 指令脉冲输入方式功能选择 n.0101(设定值) “1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型) Pn202 电子齿轮比(分子) Pn203 电子齿轮比(分母) 根据不同螺距的丝杆与带轮比计算确定,计算方法如下: Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000 参数设置范围: 1/100≤分子/分母≤100 注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。 Pn50A 功能选择 n.8100(设定值) 1-使用/S-ON 信号(伺服启动信号)。4-伺服驱动器上,“正向超程功能无效”。 Pn50B 功能选择 n.6548(设定值) 1-伺服驱动器上,“负向超程功能无效”。 Pn50E 功能选择 n.0000(设定值) 配KND 系统时,设置为“0000”,详细见安川手册 Pn50F 功能选择 n.0200(设定值) 3-伺服驱动器上,CN1 插头的27 和28 脚用作控制刹车用的24V 中间继电器的控制信号/BK。(注:当电机带刹车时需设置) Pn506 伺服关时,在电机停止情况下,刹车延时时间根据具体要求设定注:设定单位以“10ms”为单位。出厂时设为“0”。(当电机带刹车时需设置) Pn507 伺服关时,电机在转动情况下,刹车开始参数根据具体要求设定 注:电机在转动情况下,伺服关断时,当电机低于此参数设定的转速时,电机刹车才开始动作。设定单位以“转”为单位。出厂时设为“100”。(Pn507 和 Pn508 满足一个条件,刹车就开始动作) Pn508 伺服关时,电机在转动情况下,刹车延时时间根据具体要求设定 注:电机在转动情况下,伺服关断时,延时此参数设定的时间后半部,
电机功率计算公式
电机功率计算公式 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
一,电机额定功率和实际功率的区别 是指在此数据下电机为最佳工作状态。 额定电压是固定的,允许偏差10%。 电机的实际功率和实际电流是随着所拖动负载的大小而不同; 拖动的负载大,则实际功率和实际电流大; 拖动的负载小,则实际功率和实际电流小。 实际功率和实际电流大于额定功率和额定电流,电机会过热烧毁; 实际功率和实际电流小于额定功率和额定电流,则造成材料浪费。 它们的关系是: 额定功率=额定电流IN*额定电压UN*根3*功率因数 实际功率=实际电流IN*实际电压UN*根3*功率因数 二,280KW水泵电机额定电流和启动电流的计算公式和相应规范出处 (1)280KW电机的电流与极数、功率因素有关一般公式是:电流=((280KW/380V)0.8.5机的电流怎么算 答:⑴当电机为单相电机时由P=UIcosθ得:I=P/Ucosθ,其中P为电机的额定功率,U为额定电压,cosθ为功率因数; ⑵当电机为三相电机时由P=√3×UIcosθ得:I=P/(√3×Ucosθ),其中P为电机的额定功率,U为额定电压,cosθ为功率因数。 功率因数
在交流电路中,电压与电流之间的相位差(Φ)的余弦叫做功率因数,用符号 cosΦ表示,在数值上,功率因数是有功功率和视在功率的比值,即cosΦ=P/S 功率因数的大小与电路的负荷性质有关,如白炽灯泡、电阻炉等电阻负荷的功率因数为1,一般具有电感或电容性负载的电路功率因数都小于1。功率因数是电力系统的一个重要的技术数据。功率因数是衡量电气设备效率高低的一个系数。功率因数低,说明电路用于交变磁场转换的无功功率大,从而降低了设备的利用率,增加了线路供电损失。所以,供电部门对用电单位的功率因数有一定的标准要求。 (1) 最基本分析:拿设备作举例。例如:设备功率为100个单位,也就是说,有100个单位的功率输送到设备中。然而,因大部分电器系统存在固有的无功损耗,只能使用70个单位的功率。很不幸,虽然仅仅使用70个单位,却要付100个单位的费用。在这个例子中,功率因数是 (如果大部分设备的功率因数 小于时,将被罚款),这种无功损耗主要存在于电机设备中(如鼓风机、抽水机、压缩机等),又叫感性负载。功率因数是马达效能的计量标准。 (2) 基本分析:每种电机系统均消耗两大功率,分别是真正的有用功(叫千瓦)及电抗性的无用功。功率因数是有用功与总功率间的比率。功率因数越高,有用功与总功率间的比率便越高,系统运行则更有效率。 (3) 高级分析:在感性负载电路中,电流波形峰值在电压波形峰值之后发生。两种波形峰值的分隔可用功率因数表示。功率因数越低,两个波形峰值则分隔越大。保尔金能使两个峰值重新接近在一起,从而提高系统运行效率。 对于功率因数改善
如何通过电动机功率计算公式来选择合适功率大小的电动机
如何通过电动机功率计算公式来选择合适功率大小的电动机 如何通过电动机功率计算公式来选择合 适功率大小的电动机如何通过电动机功率计算公式来选择合适功率大小的电动机,电动机的功率,应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时如果电动机功率选得过小(就会出现“小马拉大车”现象,造成电动机长期过载(使其绝缘因发热而损坏(甚至电动机被烧毁;如果电动机功率选得过大(就会出现“大马拉小车”现象(其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。下面电工论坛给大家介绍两种不同的选择方法。第一种方法是采用电机功率计算公式来选择。由于不同设备应用场合不同,所以通过测量可得到的数据不一样,一个功率计算公式方法不一定能适应所有设备选择电机的场合。下面我们介绍常用的两个计算公式的思路,请大家根据自身企业设备的情况进行甑别选择。电机功率计算公式一:.通过能量守恒定律的思路来计算所需电机的功率。例子:电机功率的计算公式扬程40米,流量45L/S (也就是每秒要将45L的水提升40米), 假设管径是100MM,水的流速是(45*10,-3)/(π/4*102)=5.732M/S。这种情况下怎样来选择合适功率的电机呢,通过电机功率计 算公式选择合适的电机.水每秒获得的能量是动能+势能动能 E1,0.5*45*5.732,2,4237J势能E2,45*9.8*40,17640J总能量E,E1+E2,21877J 所需功率,21877W,21.877KW (都是以一秒为单位计算的)假设加压泵的效率η,0.8 https://www.wendangku.net/doc/b114288800.html,则电机所需功率P,21.877/0.8=27KW电机功率计算公式二:.通过公式P=F*V/1000(P=计算功率KW,F=所需拉力N,工作机线速度M/S)来选择。通过电机功率计算公式选择合适的电机对于恒定负载连续工作方式,可按下式计算所需电动机的功率:P1(kw):P=P/n1n2式中n1为生产机械的效率;n2为电动机的效率,即传动效率。按上式求出的功率P1,不一定与产品功率相同。因此(所选电动机的额定功率应等于或稍大于计算所得的功率。通过以上两种电机功率计算公式结果都是相差不大的,没有对错之分,只是不同的机械设备应用时所能提供的已知参数不一样,所以给大家推荐这两种电机功率计算公式方法,如果不正确的地方,欢迎指正,以上公式仅供参考。我厂不对通过此公式计算的结果承担任何的责任。第二种方法是通过类比法来选择合适功率大小的电动机(就是与类似生产机械所用电动机的功率进行对比)。这也是在实际生产中最常用最实际的方法。具
安川伺服里面有很多个全参数但是其中只有几个全参数需要调
安川伺服里面有很多个参数但是其中只有几个参数需要调:Pn100 Pn101Pn102 Pn103Pn401 Pn110Pn000 Pn200 Pn201 Pn202 Pn203 Pn50A 其中Pn100 Pn101 Pn102受到Fn001刚性的控制,一般情况下刚性调到5那么速度增益,位置增益,积分时间就自动调好了 将Pn110调到0运动机器那么Fn007里面就会出现机器的惯量把惯量放到Pn103里就可以了 Pn200=n.0004 Pn201=2500 Pn202=32768 Pn203=2500 Pn50A=n,8100 Fn001为机械刚性Pn100为速度增益Pn101为速度积分时间Pn102为位置增益Pn401为扭矩滤波器时间当Fn001动了之后Pn100 Pn101 Pn102就会一起动 Pn110为自动调谐,调谐的是Pn103积分比,驱动器会将积分比储存到Fn007中 Pn200为指令脉冲形态Pn201为PG分频比设定Pn202为电子齿轮比分子Pn203为电子齿轮比分母Pn50A为输入信号选择1
安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数 (见参数表);其余参数,一般情况下,不用修改。 Pn000 功能选择 n.0010(设定值) 第0位:设定电机旋转方向;设“1”改变电机旋转反向。第1位:设定控制方式为:“1”位置控制方式。 Pn200 指令脉冲输入方式功能选择 n.0101(设定值) “1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型) Pn202电子齿轮比(分子) Pn203 电子齿轮比(分母) 根据不同螺距的丝杆与带轮比计算确定,计算方法如下:Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000 参数设置范围: 1/100≤分子/分母≤100 注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。
电机选型计算-个人总结版
电机选型-总结版 电机选型需要计算工作扭矩、启动扭矩、负载转动惯量,其中工作扭矩和启动扭矩最为重要。 1工作扭矩T b计算: 首先核算负载重量W,对于一般线形导轨摩擦系数μ=0.01,计算得到工作力F b。 水平行走:F b=μW 垂直升降:F b=W 1.1齿轮齿条机构 一般齿轮齿条机构整体构造为电机+减速机+齿轮齿条,电机工作扭矩T b的计算公式为: T b=F b?D 2 其中D为齿轮直径。 1.2丝杠螺母机构 一般丝杠螺母机构整体构造为电机+丝杠螺母,电机工作扭矩T b 的计算公式为: T b=F b?BP 2πη 其中BP为丝杠导程;η为丝杠机械效率(一般取0.9~0.95,参考下式计算)。 η=1?μ′?tanα1+μ′ tanα
其中α为丝杠导程角;μ’为丝杠摩擦系数(一般取0.003~0.01,参考下式计算)。 μ=tanβ 其中β丝杠摩擦角(一般取0.17°~0.57°)。 2启动扭矩T计算: 启动扭矩T为惯性扭矩T a和工作扭矩T b之和。其中工作扭矩T b 通过上一部分求得,惯性扭矩T a由惯性力F a大小决定: F a=W?a 其中a为启动加速度(一般取0.1g~g,依设备要求而定,参考下式计算)。 a=v t 其中v为负载工作速度;t为启动加速时间。 T a计算方法与T b计算方法相同。 3 负载转动惯量J计算: 系统转动惯量J总等于电机转动惯量J M、齿轮转动惯量J G、丝杠转动惯量J S和负载转动惯量J之和。其中电机转动惯量J M、齿轮转动惯量J G和丝杠转动惯量J S数值较小,可根据具体情况忽略不计,如需计算请参考HIWIN丝杠选型样本。下面详述负载转动惯量J的计算过程。 将负载重量换算到电机输出轴上转动惯量,常见传动机构与公式如下:
电机的选型计算资料
电机选型计算书 PZY 电机(按特大型车设计即重量为2500吨) 一、提升电机 根据设计统计提升框架重量为:2200kg,则总提升重量为G=2500+2200=4700kg 。设计提升速度为5-5.5米/分钟,减速机效率为0.95。 则提升电机所需要的最小理论功率: P=386.444495 .0605.58.94700=??? 瓦。 设计钢丝绳绕法示意图: 如图所示F=1/2*G ,V2=2*V1 即力减半,速度增加一 倍,所以F=2350 kg 。 根据设计要求选择电机功率应P >4444.386瓦,因为所有车库专用电机厂家现有功率P >4444.386瓦电机最小型号 5.5KW ,所以就暂定电机功率P=5.5KW ,i=60。 钢丝绳卷筒直径已确定为260mm ,若使设备提升速度到 5.5m/min 即0.09167m/s ;
由公式: D πων= 可求知卷筒转速: r D 474.1326 .014.311=?==πνω 查电机厂家资料知:电机功率:P=5.5KW 速比: i=60电机输出轴转速为ω=25r ,扭矩为M=199.21/kg ·m ,输出轴径d=φ60mm 。 则选择主动链轮为16A 双排 z=17,机械传动比为: 25474.13i 1' ==z z 54.31474 .131725z 1=?= 取从动轮16A 双排z=33; 1).速度校核: 所选电机出力轴转速为ω=25r ,机械减速比为33/17,得提升卷筒转速: r 88.1233 17251=?=ω 综上可知:提升钢索自由端线速度: min)/(52.1026.088.1214.3m D =??==πων 则提升设备速度为:v=10.52/2=5.26m/min 。 2).转矩校核: 设备作用到钢索卷筒上的力为:G/2=2350kg 。
电动车电机及电池选型计算
电动车电机及电池选型 计算 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
C V11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 2、关于CV11整车参数 3、轮边电机选型计算 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率
其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;tm为起步加速过程的时间(s);Vm为起步加速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩 电机的基数、额定转矩 电机符合基速以下恒转矩,基速以上恒功率,因此在基速时,电机有最大功率和最大转矩。根据以下公式: 经过计算,取额定转速为250rpm,额定转矩为124Nm。
伺服电机选型计算公式
伺服电机选型计算公式 伺服电机选择的时候,首先一个要考虑的就是功率的选择。一般应注意以下两点: 1。如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。 2。如果电机功率选得过大.就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。 也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较: P=F*V/100 (其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s) 此外.最常用的是采用类比法来选择电机的功率。所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。 验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。 如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。 如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。 实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。即T = 9550P/n 式中: P —功率,kW;n —电机的额定转速,r/min;T —转矩,Nm。
关于电动车电机及电池选型计算
关于电动车电机及电池选 型计算 This manuscript was revised on November 28, 2020
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加 速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩
整理安川伺服电机参数基本调整
安川伺服电机参数基本调整动态参数调整步骤: 步骤一. 设定系统刚性(Fn 001) Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec) Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz) Ti : 速度回路积分增益(机床Ti 建议值10-30 ms) 范例: 以机床大小选择不同刚性(1米加工中心机建议Fn001设定5 ) 步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比…,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。(打开在线自动调谐功能) 2.手动Jog床台让床台来回往复多次运行。3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。4.将Fn007内容写入EEPROM。(按Mode键至Fn000→按Up或Down键至Fn007
→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM) 5.参数Pn110设12。(关闭在线自动调谐功能) 步骤三. 起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率) 马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 . 步骤四. 将速度回路增益参数再调高 就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量
伺服电机的选型计算方法
伺服电机的选型计算方法
2012-4-17 10:51:00 来源:kingservo
1、
伺服电机和步进电机的性能比较
步进电机作为一种开环控制的系统, 和现代数字控制技术有着本质的联系。 在目前国 内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交 流伺服电机也越来越多地应用于数字控制系统中。 为了适应数字控制的发展趋势, 运动控 制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。 虽然两者在控制方 式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二 者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般 为 0.72 °、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如山洋公司 (SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为 1.8°、 0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合 式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以京伺服(KINGSERVO) 全数字式交流伺服电机为例,对于带标准 2500 线编码器的电机而言,由于驱动器内部采 用了四倍频技术,其脉冲当量为 360°/10000=0.036°。对于带 17 位编码器的电机而言, 驱动器每接收 131072 个脉冲电机转一圈,即其脉冲当量为 360°/131072=0.0027466°, 是步距角为 1.8°的步进电机的脉冲当量的 1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。 振动频率与负载情况和驱动器性能有关, 一 般认为振动频率为电机空载起跳频率的一半。 这种由步进电机的工作原理所决定的低频振 动现象对于机器的正常运转非常不利。 当步进电机工作在低速时, 一般应采用阻尼技术来 克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳, 即使在低速时也不会出现振动现象。 交流伺服系统具有 共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检 测出机械的共振点,便于系统调整。 三、矩频特性不同 步进电机的输出力矩随转速升高而下降, 且在较高转速时会急剧下降, 所以其最高工 作转速一般在 300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为 2000RPM 或 3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。 四、过载能力不同 步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以京伺服 (KINGSERVO)交流伺服系统为例, 它具有速度过载和转矩过载能力。 其最大转矩为额定转 矩的三倍, 可用于克服惯性负载在启动瞬间的惯性力矩。 步进电机因为没有这种过载能力, 在选型时为了克服这种惯性力矩, 往往需要选取较大转矩的电机, 而机器在正常工作期间 又不需要那么大的转矩,便出现了力矩浪费的现象。 五、运行性能不同
电机功率的计算公式
电机功率的计算公式 扬程40米,流量45L/S 也就是每秒要将45L的水提升40米 假设管径是100MM,水的流速是(45*10^-3)/(π/4*10^-2)=5.732M/S 水每秒获得的能量是动能+势能 动能E1=0.5*45*5.732^2=4237J 势能E2=45*9.8*40=17640J 总能量E=E1+E2=21877J 所需功率=21877W=21.877KW 假设加压泵的效率η=0.8 则电机所需功率P=21.877/0.8=27KW 1、三相交流异步电动机的效率:η=P/(√3*U*I*COSφ) 其中,P—是电动机轴输出功率 U—是电动机电源输入的线电压 I—是电动机电源输入的线电流 COSφ—是电动机的功率因数 2、电动机的输出功率:指的是电动机轴输出的机械功率 3、输入功率指的是:电源给电动机输入的有功功率: P=√3*U*I*COSφ(KW) 其时,这个问题有些含糊,按说电动机的输入功率应该指的是电源输入的视在功率:S==√3*U*I 这个视在功率包括有功功率(电动机的机械损耗、铜损、铁损等)、无功功率。
皮带输送机电机功率计算公式 p=(kLv+kLQ+_0.00273QH)K KW 其中第一个K为空载运行功率系数,第二个K为水平满载系数,第三个K为附加功率系数。L为输送机的水平投影长度。Q为输送能力T/H.向上输送取加号向下取负号。 有功功率=I*U*cosφ 即额定电压乘额定电流再乘功率因数 单位为瓦或千瓦 无功功率=I*U*sinφ,单位为乏或千乏. I*U 为容量,单位为伏安或千伏安. 无功功率降低或升高时,有功功率不变.但无功功率降低时,电流要降低,线路损耗降低,反之,线路损耗要升高. 功率因数的角度怎么预算? 许多用电设备均是根据电磁感应原理工作的,如配电变压器、电动机等,它们都是依靠建立交变磁场才能进行能量的转换和传递。为建立交变磁场和感应磁通而需要的电功率称为无功功率,因此,所谓的"无功"并不是"无用"的电功率,只不过它的功率并不转化为机械能、热能而已;因此在供用电系统中除了需要有功电源外,还需要无功电源,两者缺一不可。 在功率三角形中,有功功率P与视在功率S的比值,称为功率因数cosφ,其计算公式为:cosφ=P/S=P/[(P2+Q2)^(1/2)] P为有功功率,Q为无功功率。 在电力网的运行中,功率因数反映了电源输出的视在功率被有效利用的程度,我们希望的是功率因数越大越好。这样电路中的无功功率可以降到最小,视在功率将大部分用来供给有功功率,从而提高电能输送的功率。 1 影响功率因数的主要因素 (1)大量的电感性设备,如异步电动机、感应电炉、交流电焊机等设备是无功功率的主要消耗者。据有关的统计,在工矿企业所消耗的全部无功功率中,异步电动机的无功消耗占了60%~70%;而在异步电动机空载时所消耗的无功又占到电动机总无功消耗的60%~70%。所以要改善异步电动机的功率因数就要防止电动机的空载运行并尽可能提高负载率。 (2)变压器消耗的无功功率一般约为其额定容量的10%~15%,它的空载无功功率约为满载时的1/3。因而,为了改善电力系统和企业的功率因数,变压器不应空载运行或长期处于低负载运行状态。 (3)供电电压超出规定范围也会对功率因数造成很大的影响。 当供电电压高于额定值的10%时,由于磁路饱和的影响,无功功率将增长得很快,据有关资料统计,当供电电压为额定值的110%时,一般无功将增加35%左右。当供电电压低于额定值时,无功功率也相应减少而使它们的功率因数有所提高。但供电电压降低会影响电气设备的正常工作。所以,应当采取措施使电力系统的供电电压尽可能保持稳定。
新代系统与安川电机参数调试
参数号初始值设定值PN000010PN1004060PN10120001200PN1024050PN20001PN201163842048PN20242048PN20312048PN40801PN4092000200PN50A 21008170PN50B 65436548PN001 4 2 新代系统与安川电机调试参数(西格玛二) 机械刹车DC+24V 壳体(FG) 10 控制线 0V 3W 5(PS)14FG 6(IPS)21U 1(5V)42V 2(0V)9马达端出线 编码器接线 端子符号 信号伺服电机A、系统追随误差超过,为伺服的编码器回授值与系统发出的脉冲值不符或者脉冲方向相反而造成的。需要注意的伺服参数是200、201、202。 B、如若伺服在调试时,空载的情况下,出现震动或者有强烈的电磁感应的声音,请尝试降低位置增益值,即驱动参数100,还有相关参数101、102、408、409。 C、如若伺服在调试时,在与机构连接的情况下,出现震动或者是有强烈的电磁感应的声音,请把电机与机构脱离,进行B项所述调试动作。 ①、PN201的数值须与系统参数61-80相同②、伺服在没有ON时显示bb PN002,绝对值编码器的选择n.□0□□绝对型 n.□0□□将绝对用作增量型编码器调试说明: 反转行程极限初始值为禁止保护功能 刚性自动调节功能 注意事项: 共振率波功能共振率波频率正转行程极限设定为打开保护功能电机一转脉冲数400w=2048 850=1250 100w=1250电子齿轮比分子400w=2048 850w=16384 100w=16384电子齿轮比分母400w=2048 850=625(绝对值) 积分常数位置回路增益对应新代181-183参数位置指令形态对应新代381-383参数设为0参数说明备注 控制方式0010为位置控制模式 速度回路增益
步进电机的选型及计算方法
步进电机选型的计算方法 步进电机选型表中有部分参数需要计算来得到。但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。 一、驱动模式的选择 驱动模式是指如何将传送装置的运动转换为步进电机的旋转。 下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。 ●必要脉冲数的计算 必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。必要脉冲数按下面公式计算: 必要脉冲数= 物体移动的距离 距离电机旋转一周移动的距离 × 360 o 步进角 ●驱动脉冲速度的计算 驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。 驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。 (1)自启动运行方式 自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。 自启动运行方式通常在转速较低的时候使用。同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。 自启动运行方式的驱动脉冲速度计算方法如下: 驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒] (2)加/减速运行方式
加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。 加/减速时间需要根据传送距离、速度和定位时间来计算。在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。加/减速运行方式下的驱动脉冲速度计算方法如下: 驱动脉冲速度[Hz]= 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 定位时间[秒]-加/减速时间[秒] 二、电机力矩的简单计算示例 必要的电机力矩=(负载力矩+加/减速力矩)×安全系数 ●负载力矩的计算(TL) 负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。步进电机驱动过程中始终需要此力矩。负载力矩根据传动装置和物体的重量的不同而不同。许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。 负载力矩可以根据下面的图表和公式来计算。 (1)滚轴丝杆驱动 ※负载力矩的计算公式: TL=[ F·PB 2πη + μ0F0PB 2π ]× 1 i [kgf·cm] ※负载力矩的估算公式: TL=m·PB 2πη × 1 i [kgf·cm] (水平方向) TL=m·PB × 1 ×2 [kgf·cm] (垂直方向)
电机选型计算公式
附录1:根据负载条件选用电机 电机轴上有两种负载,一种是转矩负载,另一种是惯量负载。选用电机时,必须准确计算这些负载,以便确保满足如下条件: §(1). 当机床处于非切削工作状态时,在整个速度范围内负载转矩应小于电机的连续额定 转矩。 如果在暂停或以非常低的速度运行时,由于摩擦系数增大,使得负载转矩增大并超 过电机的额定转矩,电机有可能出现过热。另一方面,在高速运行时,如果受粘滞性影响,而使转矩增大且超过额定转矩,由于不能获得足够的加速转矩,加速时间常数有可能大大增加。 §(2). 最大切削转矩所占时间(负载百分比即“ON ”时间)满足所期望的值。 §(3). 以希望的时间常数进行加速。一般来说,负载转矩有助于减速,如果加速不成问题, 以同一时间常数进行减速亦无问题。加速检查按以下步骤进行。 (I)假设电机轴按照NC 或位控所确定的ACC/DEC 方式进行理想的运动来得到加速速 率。 (II)用加速速率乘以总惯量(电机惯量+负载惯量)计算出加速转矩。 (III)将负载转矩(摩擦转矩)与加速转矩相加求得电机轴所需转矩。 (IV)需要确认,第(III)项中的转矩应小于电机的转矩(最大连续转矩),同时,小于伺服放大器电流限制回路所限制的转矩。 第(II)项中的加速转矩由下式来计算。 A.对于线性加速情况 ()() () T N t J J e N N t K e a m a m l K t r M a s K t s a s a = ??+-=-?-????? ? -?-?6021 1111π 式中:T a : 加速转矩(Kg ·Cm ) N M : 快速进给时的电机速度(rpm ) t a: 加速时间(sec ) J m: 电机惯量(Kg ·Cm ·S 2)
链轮电机功率的选择
链轮电机功率的选择 各位大虾,我是机械设计的自学学员。 我现在有一根轴,轴上的链轮挂有链条,链条上有2000KG的物体。 运行是通过链传动使轴转动,来提升物体,请问这个电机的功率我该怎么选,有什么计算公式么? P=F.V F=M.g=2000X9.8=19600N V=10m/min=0.17m/s 则P=3.33kw是正确的,但是你还要将3.33KW除上效率 比如效率是50%,则你的电机功率至少选择3.33/0.5=6.66KW 1、电动机的负载与功率因素及效率的关系 负载情况:空载1/4负载1/2负载3/4负载满载 功率因素:0.2 0.5 0.77 0.85 0.89 效率:0.0 0.78 0.85 0.88 0.895 2、对于恒定负载连续工作方式,如果知道负载的功率(既生产机械轴上的功率)p1(kw)可以按下列计算:p=p1/n1*n2,式中n1为生产机械效率,n2为电机的效率 3、短时工作额的电动机与相同的连续工作额的电动机相比,最大转矩大,重量小,价格低,因此在条件许可的时候,应尽量选用短时工作额的电动机 4、对于断续工作额的电动机,其功率的选择要根据负载持续的大小,选用专门用于断续运行方式的电动机 关于减速比 链轮角速度=链条线速度/链轮周长 减速比=初选马达转速/链轮角速度 关于扭矩(马达出力) 功率(W)=2π× 扭矩(N-m)×转速(rpm)/60 功率(kW)=扭矩(N-m) ×转速(rpm)/9549 转速=角速度/2*pi(r/s)换算rpm乘60 功率=功/时间 功=力*距离 则功率=力*距离/时间=力*速度 扭距=力*力到转动中心的距离=力*半径 对于旋转的物体速度=半径*角速度1分钟=60秒角速度=2π*rpm/60
伺服电机选型计算公式
最简单伺服电机选型计算方式: 伺服电机选择的时候,首先一个要考虑的就是功率的选择。一般应注意以下两点: 1、如果电机功率选得过小。就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。 2、如果电机功率选得过大。就会出现“大马拉小车“现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。 也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较: P=:F*V/100 (其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s) 此外。最常用的是采用类比法来选择电机的功率。所谓类比法,就是与类似生产机械所用电机的功率进行对比。 具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。 验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。 如果电功机的实际工作电流与铭脾上标出的额定电流上下相差
不大,则表明所选电机的功率合适。 如果电机的实际工作电流比铭牌上标出的额定电流低70%左右。则表明电机的功率选得过大,应调换功率较小的电机。 如果测得的电机工作电流比铭牌上标出的额定电流大40%以上。则表明电机的功率选得过小,应调换功率较大的电机。 实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。 即T=9550P/n 式中: P一功率,kW;n一电机的额定转速,r/min;T一转矩,Nm。 电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。 机械功率公式:P=T*N/97500 P:功率单位W;T:转矩,单位克/cm;N:转速,单位r/min。