SPI总线在51系列单片机系统中的实现

-21-●应用与设计
1引言
SPI(S erial Peri p heral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使M CU与各种外围设备以串行方式进行通信以交换信息。外围设备包括F LASHRAM、网络控制器、LCD 显示驱动器、A/D转换器和M CU等。SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线M OSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI 接口芯片没有主机输出/从机输入数据线M OSI)。由于SPI系统总线一共只需3~4位数据线和控制线即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~
SPI总线在51系列单片机系统中的实现
易志明,林凌,李刚,郝丽宏
(天津大学精密仪器与光电子工程学院,天津300072)
摘要:M CS51系列、M CS96系列等单片机由于都不带SPI串行总线接口而限制了其在SPI总线接口器件的使用。文中介绍了SPI串行总线的特征和时序,并以串行E2PROM为例,给出了在51系列单片机上利用I/O口线实现SPI串行总线接口的方法和软件设计程序。
关键词:单片机;SPI串行总线;总线接口
分类号:TP334.4文献标识码:B文章编号:1006-6977(2003)09-0021-03
Im p lementin g SPI Bus in51MCU S y stems
YI Zhi-m in g,LIN Lin g,LI G an g,HAO Li-hon g
Abstract:M CS51and M CS96are a pp lied w idel y,but the y aren’t used to SPI bus interface device because the y have not SPI.In this p a p er,the characters and tim in g of SPI are introduced.An exam p le which the I/O p ort of M CS51are used to p erform SPI is introduced as w ell.
K e y w ords:M CU;SPI bus;bus interface
SPI总线在51系列单片机系统中的实现
可以采用提取水印与原始水印的相关性作为衡量标准。其公式如下:
其中,w*和w分别是待判决水印和正确的水印,w是向量w的均值。如果这一相关值超过某一阈值,则可判定该图像中存在此水印。
4结束语
基于图像特征的数字水印系统由于水印信号只叠加在载体图像的特征物体中,因而系统鲁棒性较强,且具有很强的抗裁剪抗攻击能力。另外,由于水印信号叠加过程是在空域进行的,算法计算复杂度低。因此,可利用图像的HV S特性,并采用自适应方法叠加水印信号,这样即可在增加鲁棒性的同时保证水印信号的透明性。而水印检测算法则可在加入自动校正预处理模块后提高水印判决的准确性。参考文献
[1]朱友芹.WindowsA P I参考大全[M].北京:电子
工业出版,2000.3月版.
[2]陈建春.VC++高级编程技术[M].北京:电子
工业出版社,1999.9月版.
[3]曾杰.Del p hi高级编程实例精解[M].北京:国防
工业出版,2000.7月版.
[4]江华.计算机仿真导论[M].北京:科学出版社出
版,2001.3.
收稿日期:2003-02-08
咨询编号:030907
-22-《国外电子元器件》2003年第9期2003年9月
16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。由此可见,在M CS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2SPI总线的组成
利用SPI总线可在软件的控制下构成各种系统。如1个主M CU和几个从M CU、几个从M CU相互连接构成多主机系统(分布式系统)、1个主M CU和1个或几个从I/O设备所构成的各种系统等。在大多数应用场合,可使用1个M CU作为主控机来控制数据,并向1个或几个从外围器件传送该数据。从器件只有在主机发命令时才能接收或发送数据。其数据的传输格式是高位(MS B)在前,低位(LS B)在后。SPI总线接口系统的典型结构如图1所示。
当一个主控机通过SPI与几种不同的串行I/O 芯片相连时,必须使用每片的允许控制端,这可通过M CU的I/O端口输出线来实现。但应特别注意这些串行I/O芯片的输入输出特性:首先是输入芯片的串行数据输出是否有三态控制端。平时未选中芯片时,输出端应处于高阻态。若没有三态控制端,则应外加三态门。否则M CU的MISO端只能连接1个输入芯片。其次是输出芯片的串行数据输入是否有允许控制端。因为只有在此芯片允许时,SCK脉冲才把串行数据移入该芯片;在禁止时,SCK对芯片无影响。若没有允许控制端,则应在外围用门电路对SCK 进行控制,然后再加到芯片的时钟输入端;当然,也可以只在SPI总线上连接1个芯片,而不再连接其它输入或输出芯片。
3在M CS51系列单片机中的实现方法对于不带SPI串行总线接口的M CS51系列单片机来说,可以使用软件来模拟SPI的操作,包括串行时钟、数据输入和数据输出。对于不同的串行接口外围芯片,它们的时钟时序是不同的。对于在SCK 的上升沿输入(接收)数据和在下降沿输出(发送)数据的器件,一般应将其串行时钟输出口P1.1的初始状态设置为1,而在允许接口后再置P1.1为0。这样,M CU在输出1位SCK时钟的同时,将使接口芯片串行左移,从而输出1位数据至M CS51单片机的P1.3口(模拟M CU的MISO线),此后再置P1.1为1,使M CS51系列单片机从P1.0(模拟M CU的M OSI 线)输出1位数据(先为高位)至串行接口芯片。至此,模拟1位数据输入输出便宣告完成。此后再置P1.1为0,模拟下1位数据的输入输出……,依此循环8次,即可完成1次通过SPI总线传输8位数据的操作。对于在SCK的下降沿输入数据和上升沿输出数据的器件,则应取串行时钟输出的初始状态为0,即在接口芯片允许时,先置P1.1为1,以便外围接口芯片输出1位数据(M CU接收1位数据),之后再置时钟为0,使外围接口芯片接收1位数据(M CU发送1位数据),从而完成1位数据的传送。
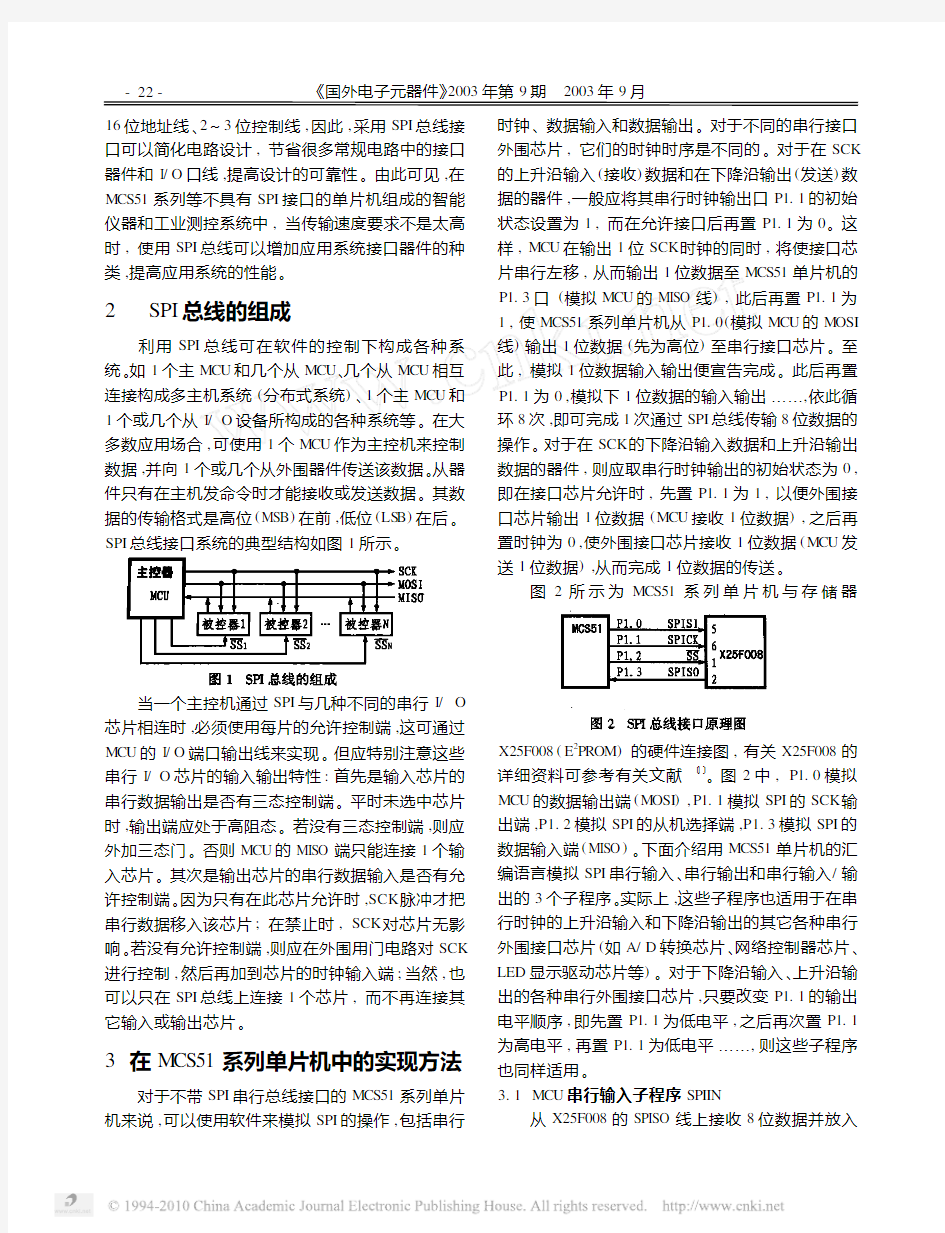
图2所示为M CS51系列单片机与存储器
X25F008(E2PROM)的硬件连接图,有关X25F008的详细资料可参考有关文献〔1〕。图2中,P1.0模拟M CU的数据输出端(M OSI),P1.1模拟SPI的SCK输出端,P1.2模拟SPI的从机选择端,P1.3模拟SPI的数据输入端(MISO)。下面介绍用M CS51单片机的汇编语言模拟SPI串行输入、串行输出和串行输入/输出的3个子程序。实际上,这些子程序也适用于在串行时钟的上升沿输入和下降沿输出的其它各种串行外围接口芯片(如A/D转换芯片、网络控制器芯片、LED显示驱动芯片等)。对于下降沿输入、上升沿输出的各种串行外围接口芯片,只要改变P1.1的输出电平顺序,即先置P1.1为低电平,之后再次置P1.1为高电平,再置P1.1为低电平……,则这些子程序也同样适用。
3.1M CU串行输入子程序SPIIN
从X25F008的
SPISO线上接收8位数据并放入
-23-SPI总线在51系列单片机系统中的实现
寄存器R0中的应用子程序如下:
SPIIN:SET B P1.1;使P1.1(时钟)输出为1
C LR P1.2;选择从机
M OV R1,#08H;置循环次数
SPIIN1:C LR P1.1;使P1.1(时钟)输出为0 NOP;延时
NOP
M OV C,P1.3;从机输出SPISO送进位C
R LC A;左移至累加器ACC
SET B P1.1;使P1.0(时钟)输出为1
D JNZ R1,SPIIN1;判断是否循环8次(8位
数据)
M OV R0,A;8位数据送R0
RET
3.2M CU串行输出子程序SPI OUT
将M CS51单片机中R0寄存器的内容传送到X25F008的SPISI线上的程序如下:
SPI OUT:SET B P1.1;使P1.1(时钟)输出为1
C LR P1.2;选择从机
M OV R1,#08H;置循环次数
M OV A,R0;8位数据送累加器ACC SPI OUT1:C LR P1.1;使P1.1(时钟)输出为0 NOP;延时
NOP
R LC A;左移至累加器ACC最
高位至C
M OV P1.0,C;进位C送从机输入
SPISI线上
SET B P1.1;使P1.1(时钟)输出为1
D JNZ R1,SPI OUT1;判是否循环8次
(8位数据)
RET
3.3M CU串行输入/输出子程序SPII O
将M CS51单片机R0寄存器的内容传送到X25F008的SPISI中,同时从X25F008的SPISO接收8位数据的程序如下:
SPII O:SET B P1.1;使P1.1(时钟)输出为1
C LR P1.2;选择从机
M OV R1,#08H;置循环次数
M OV A,R0;8位数据送累加器ACC SPII O1:C LR P1.1;使P1.1(时钟)输出为0 NOP;延时
NOP
M OV C,P1.3;从机输出SPISO送进位C
R LC A;左移至累加器ACC最
高位至C
M OV P1.0,C;进位C送从机输入
SET B P1.1;使P1.1(时钟)输出为1
D JNZ R1,SPII O1;判断是否循环8次
(8位数据)
RET
4结束语
本文介绍了通过SPI总线接口实现数据传输的实现方法,给出了用M CS51单片机汇编语言模拟SPI串行总线的输入、输出,输入/输出以传送8位数据的子程序。实际上,也可以根据SPI串行总线的操作时序特点来在M CS96系列、AT ME L89系列等单片机上实现SPI总线的接口。
参考文献
[1]X icor.非易失性器件使用手册[R].武汉:武汉
力源电子股份有限公司,1996.
[2]何立民.单片机高级教程[M].北京:北京航空
航天大学出版社,2000.
[3]王瑞福,等.单片机测控系统大全[M].北京:
北京航空航天大学出版社.
[4]涂时亮.M C68HC05单片机原理、应用及技术手
册[M].上海:复旦大学出版社,1991.
收稿日期:2003-01-06
咨询编号:030908
值此2004年征订期间,《国外电子元器件》杂志全体员工向关心和支持本杂志的新老读者表示感谢!同时提醒广大读者速到各地邮局订阅或汇款至杂志社订阅2004年杂志。
地址:西安市劳动南路68号5-1-4信箱
邮编:710082
电话:(029)42402554262159传真:4261340月刊,大16K,6元/期,全年72元欢迎订阅2004年
《国外电子元器件》
单片机整点报时闹钟
单片机最小应用系统 设 计 报 告 指导老师:吴兆华 学生:曾雅琼 学号: 092011109 机电工程学院 2010年五月
目录 一设计题目 (3) 二设计目的 (3) 2.1 设计目的要求 (3) 2.2 系统设计意义 (3) 三系统硬件图 (3) 四程序流程图 (4) 五、系统说明与分析 (4) 5.1 系统主要组成部分 (5) 5.2 单片机最小系统部分 (5) 5.2.1 MCS-51系列单片机概述 (5) 5.2.2 MCS-51系列单片机的并行I/O口 (6) 5.2.3 MCS-51系列单片机的工作方式和时序 (7) 5.3 数码显示部分 (8) 5.3.1概述 (8) 5.3.2 LED数码管引脚结构 (8) 5.3.3 LED数码管显示原理 (9) 5.3.4 LED数码管的驱动方式 (10) 5.4电路板的制作 (11) 5.5 系统连线说明分析 (12) 六源程序 (13) 七总结 (19) 八参考文献 (20)
一设计题目 整点报时闹钟 二设计目的 该单片机最小应用系统设计目的及要求如下: 2.1 设计目的要求 1、通过本次实验,掌握单片机I/O口的使用,6位7段数码管动态显示数据的方法 以及蜂鸣器的用法; 2、通过对单片机的使用和编程,了解单片机的应用编程; 3、掌握单片机汇编语言设计和分析方法; 4、学会使用并熟练掌握电路绘制软件Protel99SE; 5、掌握电路图绘制及PCB图布线技巧。 2.2 系统设计意义 1、在系统掌握单片机相应基础知识的前提下,熟悉单片机最小应用系统的设计方法及系统设计的基本步骤。 2、完成所需单片机最小应用系统原理图设计绘制的基础上完成系统的电路图设计。 3、完成系统所需的硬件设计制作,在提高实际动手能力的基础上进一步巩固所学知识。 4、进行题目要求功能基础上的软件程序编程,会用相应软件进行程序调试和测试工作。 5、用AT89S51,DAC0823设计出题目所要求的电压输出,实现电压值动态显示,并针对实际设计过程中软、硬件设计方面出现的问题提出相应解决办法。
8051单片机常用指令
3.2.1数据传送与交换类指令 共有28条指令,包括以A,Rn,DPTR,直接地址单元,间接地址单元为目的的操作数的指令;访问外部RAM的指令;读程序存储器的指 9.堆栈操作 3.2 分类指令 在介绍各条分类指令之前,将指令中的操作数及注释中的符号说明如下。Rn:当前指定的工作寄存器组中的Ro-R7(其中n=0,1,2,…,7)。 Ri:当前指定的工作寄存器组中的RO,R1(其中i=0,1)。 (Ri):Ri间址寻址指定的地址单元。 ((Ri)):Ri间址寻址指定地址单元中的内容。 dir:8位直接字节地址(在片内RAM和SFR存储空间中)。 #data8:8位立即数。 #datal6:16位立即数。 addrl6:16位地址值。 addrll:11位地址值。 bit:位地址(在位地址空间中)。 rel:相对偏移量(一字节补码数)。 下面介绍各条分类指令的主要功能和操作,详细的指令操作说明及机器码形式可见附录。 3.2.1数据传送与交换类指令
共有28条指令,包括以A,Rn,DPTR,直接地址单元,间接地址单元为目的的操作数的指令;访问外部RAM的指令;读程序存储器的指 令;数据交换指令以及准栈操作指令。
9.堆栈操作 PUSH dir ;SP十1-6P,(dir)一(SP) POP dir ;((SP))一dir,SP-1--P , 例1 SP=07H,(35H)=55H,指令PUSH 35H执行后,55H送入08H地址单元,SP= 08H。 例2 SP=13H,(13H)= 1FH,指令POP 25H执行后,1FH压入25H地址单元,SP此时为12H。 综合例把片内RAM中50H地址单元中的内容与40H地址单元中的内容互换。方法一(直接地址传送法): MOV A ,50H
设计单片机通讯协议论文(非常经典)
如何设计单片机常用通信 协议论文
目录 1.自定义数据通信协议 (3) 2.上位机和下位机中的数据发送 (3) 3.下位机中的数据接收和协议解析 (4) 4.上位机中的数据接收和命令处理 (8) 5.总结 (9)
单片机通信协议现在大部分的仪器设备都要求能过通过上位机软件来操作,这样方便调试,利于操作。其中就涉及到通信的过程。在实际制作的几个设备中,笔者总结出了通信程序的通用写法,包括上位机端和下位机端等。 1.自定义数据通信协议 这里所说的数据协议是建立在物理层之上的通信数据包格式。所谓通信的物理层就是指我们通常所用到的RS232、RS485、红外、光纤、无线等等通信方式。在这个层面上, 底层软件提供两个基本的操作函数:发送一个字节数据、接收一个字节数据。所有的数据协议全部建立在这两个操作方法之上。通信中的数据往往以数据包的形式进行传送的,我们把这样的一个数据包称作为一帧数据。类似于网络通信中的TCPIP协议一般,比较可靠的通信协议往往包含有以下几个组成部分:帧头、地址信息、数据类型、数据长度、数据块、校验码、帧尾。 帧头和帧尾用于数据包完整性的判别,通常选择一定长度的固定字节组成,要求是在整个数据链中判别数据包的误码率越低越好。减小固定字节数据的匹配机会,也就是说使帧头和帧尾的特征字节在整个数据链中能够匹配的机会最小。通常有两种做法,一、减小特征字节的匹配几率。二、增加特征字节的长度。通常选取第一种方法的情况是整个数据链路中的数据不具有随即性,数据可预测,可以通过人为选择帧头和帧尾的特征字来避开,从而减小特征字节的匹配几率。使用第二种方法的情况更加通用,适合于数据随即的场合。通过增加特征字节的长度减小匹配几率,虽然不能够完全的避免匹配的情况,但可以使匹配几率大大减小,如果碰到匹配的情况也可以由校验码来进行检测,因此这种情况在绝大多说情况下比较可靠。 地址信息主要用于多机通信中,通过地址信息的不同来识别不同的通信终端。在一对多的通信系统中,可以只包含目的地址信息。同时包含源地址和目的地址则适用于多对多的通信系统。 数据类型、数据长度和数据块是主要的数据部分。数据类型可以标识后面紧接着的是命令还是数据。数据长度用于指示有效数据的个数。 校验码则用来检验数据的完整性和正确性。通常对数据类型、数据长度和数据块三个部分进行相关的运算得到。最简单的做法可是对数据段作累加和,复杂的也可以对数据进行CR C运算等等,可以根据运算速度、容错度等要求来选取。 2.上位机和下位机中的数据发送 物理通信层中提供了两个基本的操作函数,发送一个字节数据则为数据发送的基础。数据 包的发送即把数据包中的左右字节按照顺序一个一个的发送数据而已。当然发送的方
语音芯片时钟电路(整点报时名闹铃设置)程序
#include
基于51单片机设计的带有测温功能的电子时钟汇总
、 职业技能训练之 电子技术课程设计报告 学院电子与信息学院 设计题目基于51单片机设计的带有测温功能的电子时钟班级XXX 姓名XXX 学号XXX 指导教师XXX 时间2012年06月25日
目录 一、设计要求 二、课程设计的方案、目的及意义 三、硬件设计方案 四、软件设计方案 五、总结 六、参考资料
一、设计要求 用51单片机设计带温度显示的电子时钟,具体要求如下: 1、利用DS1302时钟芯片实现时钟功能模块。 2、时钟要求可以调节时间:年、月、日、时、分、秒。 3、利用LCD1602显示。 4、利用DS18B20芯片实现温度功能模块。 5、利用按键完成各项功能。 二、课程设计方案、目的及意义 1、总体方案: 用STC89C51单片机作为CPU主控制器,DS1302时钟芯片提供准确时钟信号,DS18B20温度传感器采集温度信息,三个按键进行加减调整、功能切换作用,通过LCD1602对外多功能显示。 2、具体方案: CPU控制所有模块,通过循环反复从DS1302中读取时钟信息,传送至LCD1602显示,得到基本时钟功能。当分为59,秒为56时开始,每隔一秒LED 灯点亮240毫秒,0分0秒时LED灯点亮700毫秒。从而实现整点光报时。 定时循环从DS18B20中读取温度信息,传送至LCD1602显示,得到基本温度计功能。当温度高于30度(包括30度)时,点亮红色LED灯,提醒当天为高温天气。低于0度时,点亮蓝色LED灯,提醒当天为冰冻天气。 键盘使用扫面方式,MENU键控制功能切换,完成时钟和温度间的转换。OK键控制时间调整与确定,UP、DOWN键调节时间,R、L 键选择调整对象。进入调整时,暂停DS1302数据读取,并将改变的时间数据写入DS1302,并送LCD1602显示,同时,启动LCD1602光标闪烁,确定调整对象,完成人机对话。退出调整时,停止写入数据,重新读取DS1302时钟信息。从而完善时钟功能。 3、目的及意义 可作为产品生产,作为居家的时钟显示与温度计。
51串口通信协议(新型篇)
51串口通信协议(新型篇) C51编程:这是网友牛毅编的一个C51串口通讯程序! //PC读MCU指令结构:(中断方式,ASCII码表示) //帧:帧头标志|帧类型|器件地址|启始地址|长度n|效验和|帧尾标志 //值: 'n' 'y'| 'r' | 0x01 | x | x | x |0x13 0x10 //字节数: 2 | 1 | 1 | 1 | 1 | 1 | 2 //求和: ///////////////////////////////////////////////////////////////////// //公司名称:*** //模块名:protocol.c //创建者:牛毅 //修改者: //功能描述:中断方式:本程序为mcu的串口通讯提供(贞结构)函数接口,包括具体协议部分 //其他说明:只提供对A T89c51具体硬件的可靠访问接口 //版本:1.0 //信息:QQ 75011221 ///////////////////////////////////////////////////////////////////// #include
51单片机汇编指令集(附记忆方法)
51单片机汇编指令集 一、数据传送类指令(7种助记符) MOV(英文为Move):对内部数据寄存器RAM和特殊功能寄存器SFR的数据进行传送; MOVC(Move Code)读取程序存储器数据表格的数据传送; MOVX (Move External RAM) 对外部RAM的数据传送; XCH (Exchange) 字节交换; XCHD (Exchange low-order Digit) 低半字节交换; PUSH (Push onto Stack) 入栈; POP (Pop from Stack) 出栈; 二、算术运算类指令(8种助记符) ADD(Addition) 加法; ADDC(Add with Carry) 带进位加法; SUBB(Subtract with Borrow) 带借位减法; DA(Decimal Adjust) 十进制调整; INC(Increment) 加1; DEC(Decrement) 减1; MUL(Multiplication、Multiply) 乘法; DIV(Division、Divide) 除法; 三、逻辑运算类指令(10种助记符) ANL(AND Logic) 逻辑与; ORL(OR Logic) 逻辑或; XRL(Exclusive-OR Logic) 逻辑异或; CLR(Clear) 清零; CPL(Complement) 取反; RL(Rotate left) 循环左移; RLC(Rotate Left throught the Carry flag) 带进位循环左移; RR(Rotate Right) 循环右移; RRC (Rotate Right throught the Carry flag) 带进位循环右移; SWAP (Swap) 低4位与高4位交换; 四、控制转移类指令(17种助记符) ACALL(Absolute subroutine Call)子程序绝对调用; LCALL(Long subroutine Call)子程序长调用; RET(Return from subroutine)子程序返回; RETI(Return from Interruption)中断返回; SJMP(Short Jump)短转移; AJMP(Absolute Jump)绝对转移; LJMP(Long Jump)长转移; CJNE (Compare Jump if Not Equal)比较不相等则转移;
51单片机c语言电子钟(已加入调时、闹铃、整点报时功能)
51单片机c语言电子钟(已加入调时、闹铃、 整点报时功能) 效果图:
程序如下: //51单片机c语言电子钟(已加入调时、闹铃、整点报时功能) //WHJWNAVY 2011/10/14 #include
uchar bjcs;//报警次数 sbit P1_0=P1^0; //second 调整定义sbit P1_1=P1^1; //minite调整定义sbit P1_2=P1^2; //hour调整定义sbit P1_5=P1^5; //整点报时 sbit P1_3=P1^3; //闹铃功能,调整时间 sbit P1_6=P1^6; //调整时 sbit P1_7=P1^7; //调整分 sbit P1_4=P1^4; //关闭闹铃 /*函数声明*/ void delay(uint k ); //延时子程序 void time_pro( ); //时间处理子程序 void display( ); //显示子程序 void keyscan( ); //键盘扫描子程序 /*延时子程序*/ void delay (uint k) { uchar j; while((k--)!=0) { for(j=0;j<125;j++)
基于51单片机控制的语音报时万年历课程设计报告书
基于51单片机控制的语音报时万年历 -----20/11/2013 SDU(WH) 一.实验要求 运用单片机及相关外设实现以下功能: 1)万年历及时钟显示 2)时间日期可调 3)可对时间进行整点报时和随机报时 二.方案分析 根据实验要求,选用STC公司的8051系列,STC12C5A16S2增强型51单片机。此单片机功能强大,具有片EEPROM、1T分频系数、片ADC转换器等较为实用功能,故选用此款。 实验中,对日期和时间进行显示,显示的字符数较多,故选用12864LCD屏幕。该屏幕操作较为便捷,外围电路相对简单,实用性较强。 为了实现要求中的时间日期可调,故按键是不可缺少的,所以使用了较多的按键。一方面,单片机的I/O口较为充足;另一方面,按键较多,选择的余地较大,方便编程控制。 实验中,并未要求对时间和日期进行保存和掉电续运行,所以并未添加EEPROM和DS12C887-RTC芯片。实际上,对万年历来说,这是较为重要的,但为了方便实现和编程的简单,此处并未添加,而是使用单片机的定时器控制时间,精度有差别。且上电默认时间为2014-01-01 09:00:00 之后需要手动调整为正确时间。 要求中的语音报时功能,这里选用ISD1760芯片的模块来帮助实现。此模块通过软件模拟SPI协议控制。先将所需要的声音片段录入芯片的EEPROM区域,之后读出各段声音的地址段,然后在程序中定义出相应地址予以控制播放哪一声音片段。 三.电路硬件设计 实际效果图 四.程序代码部分
Main.h #ifndef _MAIN_H #define _MAIN_H #include "reg52.h" #include "INTRINS.H" #include "math.h" #include "string.h" #include "key.h" #include "led.h" #include "12864.h" #include "main.h" #include "isd1700.h" #include "sound.h" extern unsigned int count; extern unsigned int key_time[8]; extern unsigned char key_new; extern unsigned char key_old; extern unsigned char stop_flag; extern unsigned char key_follow[8]; extern unsigned int key_num[8]; sbit BEEP=P3^7; sbit ISD_SS=P0^7; sbit ISD_MISO=P0^4; sbit ISD_MOSI=P0^5; sbit ISD_SCLK=P0^6; extern unsigned char date_show[]; extern unsigned char time_show[]; extern unsigned char sec; extern unsigned char min; extern unsigned char hour; extern unsigned char day; extern unsigned char month; extern unsigned char year_f; extern unsigned char year_l; extern unsigned char leap_year_flag;
#第3章-MCS-51系列单片机的指令系统和汇编语言程序
第3章MCS一51系列单片机的指令系统 和汇编语言程序 3·1汇编指令 3·1·1请阐明机器语言、汇编语言、高级语言三者的主要区别,进一步说明为什么这三种语言缺一不可。 3·1·2请总结: (1)汇编语言程序的优缺点和适用场合。 (2)学习微机原理课程时,为什么一定要学汇编语言程序? 3·1·3MCS一51系列单片机的寻址方式有哪儿种?请列表分析各种寻址方式的访问对象和寻址范围。 3·1·4要访问片内RAM,可有哪几种寻址方式? 3·1·5要访问片外RAM,有哪几种寻址方式? 3·1·6要访问ROM,又有哪几种寻址方式? 3·1·7试按寻址方式对MCS一51系列单片机的各指令重新进行归类(一般根据源操作数寻址方式归类,程序转移类指令例外)。 3·1·8试分别针对51子系列和52子系列,说明MOV A,direct指令和MOV A,@Rj 指令的访问范围。 3·1·9传送类指令中哪几个小类是访问RAM的?哪几个小类是访问ROM的?为什么访问ROM的指令那么少?CPU访问ROM多不多?什么时候需要访问ROM? 3·1·10试绘图示明MCS一51系列单片机数据传送类指令可满足的各种传送关系。3·1·11请选用指令,分别达到下列操作: (1)将累加器内容送工作寄存器R6. (2)将累加器内容送片内RAM的7BH单元。 (3)将累加器内容送片外RAM的7BH单元。 (4)将累加器内容送片外RAM的007BH单元。 (5)将ROM007BH单元内容送累加器。 3·1·12 区分下列指令的不同功能: (l)MOV A,#24H 和MOV A.24H (2)MOV A,R0和MOV A,@R0 (3)MOV A,@R0和MOVX A,@R0 3·1·13设片内RAM 30H单元的内容为40H; 片内RAM 40H单元的内容为l0H; 片内RAM l0H单元的内容为00H; (Pl)=0CAH。 请写出下列各指令的机器码和执行下列指令后的结果(指各有关寄存器、RAM单元和端口的内容)。 MOV R0,#30H MOV A,@R0 MOV RI,A MOV B,@Rl MOV @R0,Pl MOV P3,Pl MOV l0H,#20H MOV 30H,l0H
基于单片机的定时报时系统
摘要 时间是现代社会中不可缺少的一项参数,无论是平时生活还是社会生产都需要对时间进行控制,有的场合对其精确性还有很高的要求.采用单片机进行计时,对于社会生产有着十分重要的作用。 本文首先介绍了单片机和时钟的概念,然后根据设计要求提出系统总体设计方案,并设计各部分硬件模块和软件模块,再用设计的具体软件程序,用PROTEUS 软件进行仿真和调试,结果证明该设计系统的可行性。 由于AT89S51系列单片机的控制器运算能力强,处理速度快,可以精确计时,很好地解决了实际生产生活中对计时高精确度的要求,因此该设计在现代社会中具有广泛的适用性。 关键词:单片机;定时;报时;设计
目录 第一章简介 (1) 一、基于单片机的数字钟介绍 (1) 二、本系统的特点和功能介绍 (1) 第二章硬件设计 (1) 一、总体设计方案 (1) 二、硬件结构设计 (2) 1、51单片机的最小系统 (2) 2、显示部分设计 (3) 3、电源部分设计 (4) 4、串口通信部分设计 (4) 5、报时部分的设计 (4) 6、键盘部分的设计 (5) 7、总体硬件电路图 (5) 第三章软件设计 (6) 一、部分设计思想的说明 (6) 二、参考程序 (9) 总结 (12) 参考文献 (13)
第一章简介 一、基于单片机的数字钟介绍 1.单片机定义: “单片机”就是将计算机的基本部件集成到一块芯片上,包括CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、并行口(Parallel Port)、串行口(Serial Port)、定时器/计数器(Timer/Counter)、中断系统(Interrupt System)、系统时钟及系统总线等。 2.数字钟介绍: 时钟是将小时、分钟、秒钟显示于人的肉眼的计时装置。而单片机模块中最常见的正是数字钟,数字钟是一种用数字电路技术实现时、分、秒计时的装置,与机械式时钟相比具有更高的准确性和直观性,且无机械装置,具有更长的使用寿命,因此得到了广泛的使用。而LED电子定时时钟是以单片机为基础的数字电路实现对时、分、秒的数字显示的数字计时装置,它的计时周期为12小时,另外应有校时功能和一些显示日期、闹钟等附加功能。 由于时钟的实用性和在人们生活中的重要性,所以尝试设计以单片机为核心的数字时钟是很有意义的。钟表原先的报时功能已经原不能满足人们日益增长的要求,现代的电子时钟多带有类似自动报警、按时自动打铃、时间程序自动控制、定时广播、自动起闭路灯、通断动力设备、甚至各种定时电气的自动启用等功能。 二、本系统的特点和功能介绍 1.特点: 我所设计的是LED显示的自动报时系统,是一种基于单片机技术的电子产品,用到的单片机芯片是AT89C52芯片,除此之外还包括晶振电路和复位电路构成单片机最小应用系统,还有按键电路,显示电路,报时电路等等。 计时方案采用软件控制利用AT89C52单片机内部的定时/计数器进行定时,配合软件延时实现时、分的计时。 2.本单片机报时控制系统具备以下功能 (1)有电子时钟,定时闹铃功能。 (2)时钟显示功能:4位LED从左到右依次显示“分分秒秒”,采用12小时制显示。 (3)采用4个独立按键(移位键、加1键、减1键、校时置入键)移位键:每按动移位键一次,小数点从左向右移动1位。 加1键:对小数点所在位的数什进行十进制加1。 减1键:对小数点所在位的数值进行十进制减1。
51单片机指令
3.2 分类指令 在介绍各条分类指令之前,将指令中的操作数及注释中的符号说明如下。 Rn:当前指定的工作寄存器组中的Ro-R7(其中n=0,1,2,…,7)。 Ri:当前指定的工作寄存器组中的RO,R1(其中i=0,1)。 (Ri):Ri间址寻址指定的地址单元。 ((Ri)):Ri间址寻址指定地址单元中的内容。 dir:8位直接字节地址(在片内RAM和SFR存储空间中)。 #data8:8位立即数。 #datal6:16位立即数。 addrl6:16位地址值。 addrll:11位地址值。 bit:位地址(在位地址空间中)。 rel:相对偏移量(一字节补码数)。 下面介绍各条分类指令的主要功能和操作,详细的指令操作说明及机器码形式可见附录。 3.2.1数据传送与交换类指令 共有28条指令,包括以A,Rn,DPTR,直接地址单元,间接地址单元为目的的操作数的指令;访问外部RAM的指令;读程序存储器的指
令;数据交换指令以及准栈操作指令。 9.堆栈操作 PUSH dir ;SP十1-6P,(dir)一(SP)
POP dir ;((SP))一dir,SP-1--P , 例1 SP=07H,(35H)=55H,指令PUSH 35H执行后,55H送入08H地址单元,SP= 08H。 例2 SP=13H,(13H)= 1FH,指令POP 25H执行后,1FH压入25H地址单元,SP此时为12H。 综合例 把片内RAM中50H地址单元中的内容与40H地址单元中的内容互换。方法一(直接地址传送法): MOV A ,50H 数据传送与交换类指令是各类指令中数量最多、使用最频繁的一类指令,编程时应能十分熟练地灵活运用
关于51单片机上实现modbus协议
关于51单片机上实现modbus协议 你找一个MODBUS的协议详细资料好好看看,就是一种通讯约定,你按照它规定的格式通讯就可以了 协议发送给询问方。Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。此协议定义了控制器能够认识和使用的消息结构,而不管它们是经过何种网络进行通信的。标准的Modicon控制器使用RS232C实现串行的Modbus。 Modbus的ASCII、RTU协议规定了消息、数据的结构、命令和就答的方式,数据通讯采用Maser/Slave方式,Master端发出数据请求消息,Slave端接收到正确消息后就可以发送数据到Master端以响应请求;Master端也可以直接发消息修改Slave端的数据,实现双向读写。Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC 校验,RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP协议是一个面向连接的可靠协议。另外,Modbus采用主从方式定时收发数据,在实际使用中如果某Slave站点断开后(如故障或关机),Master端可以诊断出来,而当故障修复后,网络又可自动接通。因此,Modbus协议的可靠性较好。下面我来简单的给大家介绍一下,对于Modbus的ASCII、RTU和TCP协议来说,其中TCP和RTU协议非常类似,我们只要把RTU协议的两个字节的校验码去掉,然后在RTU协议的开始加上5个0和一个6并通过TCP/IP网络协议发送出去即可。所以在这里我仅介绍一下Modbus的ASCII和RTU协议。下表是ASCII协议和RTU协议进行的比较:协议开始标记结束标记校验传输效率程序处理 ASCII :(冒号)CR,LF LRC 低直观,简单,易调试 RTU 无无CRC 高不直观,稍复杂 通过比较可以看到,ASCII协议和RTU协议相比拥有开始和结束标记,因此在进行程序处理时能更加方便,而且由于传输的都是可见的ASCII字符,所以进行调试时就更加的直观,另外它的LRC校验也比较容易。但是因为它传输的都是可见的ASCII字符,RTU传输的数据每一个字节ASCII都要用两个字节来传输,比如RTU传输一个十六进制数0xF9,ASCII 就需要传输’F’’9’的ASCII码0x39和0x46两个字节,这样它的传输的效率就比较低。所以一般来说,如果所需要传输的数据量较小可以考虑使用ASCII协议,如果所需传输的数据量比较大,最好能使用RTU协议。 下面对两种协议的校验进行一下介绍。 1、LRC校验 LRC域是一个包含一个8位二进制值的字节。LRC值由传输设备来计算并放到消息帧中,接收设备在接收消息的过程中计算LRC,并将它和接收到消息中LRC域中的值比较,如果两值不等,说明有错误。
基于51单片机,电子显示时钟带闹钟、整点报时、日期、星期
#include 单片机通信协议 现在大部分的仪器设备都要求能过通过上位机软件来操作,这样方便调试,利于操作。其中就涉及到通信的过程。在实际制作的几个设备中,笔者总结出了通信程序的通用写法,包括上位机端和下位机端等。 1.自定义数据通信协议 这里所说的数据协议是建立在物理层之上的通信数据包格式。所谓通信的物理层就是指我们通常所用到的RS232、RS485、红外、光纤、无线等等通信方式。在这个层面上,底层软件提供两个基本的操作函数:发送一个字节数据、接收一个字节数据。所有的数据协议全部建立在这两个操作方法之上。 通信中的数据往往以数据包的形式进行传送的,我们把这样的一个数据包称作为一帧数据。类似于网络通信中的TCPIP协议一般,比较可靠的通信协议往往包含有以下几个组成部分:帧头、地址信息、数据类型、数据长度、数据块、校验码、帧尾。 帧头和帧尾用于数据包完整性的判别,通常选择一定长度的固定字节组成,要求是在整个数据链中判别数据包的误码率越低越好。减小固定字节数据的匹配机会,也就是说使帧头和帧尾的特征字节在整个数据链中能够匹配的机会最小。通常有两种做法,一、减小特征字节的匹配几率。二、增加特征字节的长度。通常选取第一种方法的情况是整个数据链路中的数据不具有随即性,数据可预测,可以通过人为选择帧头和帧尾的特征字来避开,从而减小特征字节的匹配几率。使用第二种方法的情况更加通用,适合于数据随即的场合。通过增加特征字节的长度减小匹配几率,虽然不能够完全的避免匹配的情况,但可以使匹配几率大大减小,如果碰到匹配的情况也可以由校验码来进行检测,因此这种情况在绝大多说情况下比较可靠。 地址信息主要用于多机通信中,通过地址信息的不同来识别不同的通信终端。在一对多的通信系统中,可以只包含目的地址信息。同时包含源地址和目的地址则适用于多对多的通信系统。 数据类型、数据长度和数据块是主要的数据部分。数据类型可以标识后面紧接着的是命令还是数据。数据长度用于指示有效数据的个数。 校验码则用来检验数据的完整性和正确性。通常对数据类型、数据长度和数据块三个部分进行相关的运算得到。最简单的做法可是对数据段作累加和,复杂的也可以对数据进行CRC运算等等,可以根据运算速度、容错度等要求来选取。 2.上位机和下位机中的数据发送 物理通信层中提供了两个基本的操作函数,发送一个字节数据则为数据发送的基础。数据包的发送即把数据包中的左右字节按照顺序一个一个的发送数据而已。当然发送的方法也有不同。 在单片机系统中,比较常用的方法是直接调用串口发送单个字节数据的函数。这种方法的缺点是需要处理器在发送过程中全程参与,优点是所要发送的数据能够立即的出现在通信线路上,能够立即被接收端接收到。另外一种方法是采用中断发送的方式,所有需要发送的数据被送入一个缓冲区,利用发送中断将缓冲区中的数据发送出去。这种方法的优点是占用处理器资源小,但是可能出现需要发送的数据不能立即被发送的情况,不过这种时延相当的小。对于51系列单片机,比较倾向于采用直接发送的方式,采用中断发送的方式比较占用RAM资源,而且对比直接发送来说也没有太多的优点。以下是51系列单片机中发送单个字节的函数。 v oid SendBy te(unsigned char ch) { SBUF = ch; while(TI == 0); TI = 0; } 51单片机的指令系统及试验 在讲指令系统前我们先来复习一下数制的概念。1. 十进制(Decimal)基数是10,它有10个数字符号,即0,l,2,3,4,5,6,7,8,9。其中最大数码是基数减1,即9,最小数码是0。2.二进制(Binary)基数是2,它 只有两个数字符号,即0和1。这就是说,如果在给定的数中,除0和1外还有其它数,例如 1012,它就决不会是一个二进制数。3、十六进制(Hexadecilnal)基数是16,它有16个数字符号,除了十进制中的10个数可用外,还使用了6个英文字母。它的16个数字依次是0,l,2,3,4,5,6,7,8,9,A,B,C,D,E,F。其中A至F 分别代表十进制数的10至15,最大的数字也是基数减1。 4、二进制数与十六进制数的相互转换。(1)、二进制转换为十六进制:整数部分,从低位开始,小数部分,从高位开始,每四位一组(不够四位的补0),转换为对应的 十六进制数。例:(1 0001 0011.1100 0111)2=(113.C7)H (2)、十六进制转换为二进制:将十六进制数的每一位分别转换为对应的四位二进制数。例:(3E9D)H=(11 1110 1001 1101)B例:( 2ABE)H= 0010 1010 1011 1110B 以后我们在单片机编程方面采用十六进制,这个请大家 注意了!MCS-51系列单片机的指令系统共有111条指令, 其中49条是单字节指令,45条是双字节指令,17条是三字节指令。MCS-51的指令系统共有33个功能,用汇编编程时只需要42个助记符就能指明这33个功能操作。1、指令格式:MCS-51汇编语言指令格式与其他微机的指令格 式一样,均由以下几部分组成:[标号:]操作码 [操作数][,操作数][;注释]标号:又称为指令地址符号,地址的符号化,一般由1到6个字符组成,以字母开头的字母数字串,与操作码之间用冒号分开。操作码:是由助 记符表示的字符串,它规定了指令的操作功能。操作数:是指参加操作的数据和数据的地址。注释:是为该条指 令作说明,以便于阅读。注意:[ ]中表示为可选项。操作数可以为1、2、3个,也可以没有。不同功能的指令,操作数作用不同,如:传送指令多数有两个操作数,写 在左面的是目的操作数(表示操作结果存放的单元地址),写在右面的称为源操作数(指出操作数的来源)。操作码和操作数之间必须用空格分隔,操作数与操作数之间必 须用逗号“,”分隔。带方括号项可有可无,称为可选项。操作码是指令的核心不可缺少。2、指令分类 MCS-51的111条指令分为下面5类:(1)数据传送类 指令29条,分为片内RAM,片外RAM、程序存储器的传送指令,交换及堆栈操作指令。(2)算术运算类24条,分为加,带进位加,减,乘,除,加1,减1指令。(3) 机器语言指令格式: 单字节指令:操作码 双字节指令:操作码操作数 三字节指令:操作码第一操作数,第二操作数........................................................... 汇编语言指令格式: 标号:操作码目的操作数,源操作数;注释........................................................... 寻址方式: ①立即寻址方式---#data ②直接寻址方式---direc ③寄存器寻址方式---Rn ④寄存器间接寻址方式---@ ⑤变址寻址方式---@A+DPTR ⑥相对寻址方式---SJMP ⑦位寻址方式(MOV ACC.3,Cy) ........................................................... MCS-51系列单片机指令系统: 1数据传送指令: (1)内部RAM中一般数据传送指令 (2)16位数据传送指令 (3)累加器与外部数据存储器的数据传送指令 (4)访问程序存储器指令(5)堆栈操作指令 (6)数据交换指令 2算术运算指令: (1)加法指令 (2)减法指令 (3)乘法指令 (4)除法指令 (5)加1/减1指令 (6)BCD码调整指令 3逻辑运算指令: (1)逻辑“与”运算指令(2)逻辑“或”运算指令(3)逻辑“异或”运算指令(4)清零和取反指令 (5)循环移位指令 4转移和调用返回指令:(1)子程序调用和返回指令 ①绝对调用指令 ②长调用指令 ③子程序返回指令 ④中断返回指令 (2)转移指令: ①无条件转移指令 ②条件转移指令 (3)空操作指令 5位操作指令: (1)位传送指令 (2)位置位指令 (3)位清零指令 (4)位取反指令 (5)位逻辑运算指令........................................................... 指令系统中的常用符号: (1)A, #data, direct, Rn, @Rn, DPTR, PC (2)#data16, addr11, addr16, rel, B, Cy, bit, /bit ...........................................................51单片机通信协议
51单片机的指令系统及试验
MCS-51系列--单片机指令系统
- 第3章-MCS-51系列单片机的指令系统和汇编语言程序范文
- 8051单片机指令系统
- 51单片机指令系统课件
- 51单片机的指令系统
- 第3章-MCS-51系列单片机的指令系统和汇编语言程序
- 第2章51系列单片机的指令系统
- 51单片机指令系统
- MCS-51单片机指令关键系统
- 第3章 51系列指令系统和程序设计
- 51单片机汇编指令集(附记忆方法)
- 快速学习51单片机汇编指令集(入门必备)
- 第2章 MCS-51单片机指令系统
- 51单片机指令系统
- 第2章 51系列单片机的指令系统
- 【大学课件】MCS51单片机指令系统
- MCS-51系列--单片机指令系统
- 【单片机知识】第3章 MCS-51单片机指令系统及编程举例英语