汽车理论matlab(独创版)

1.3
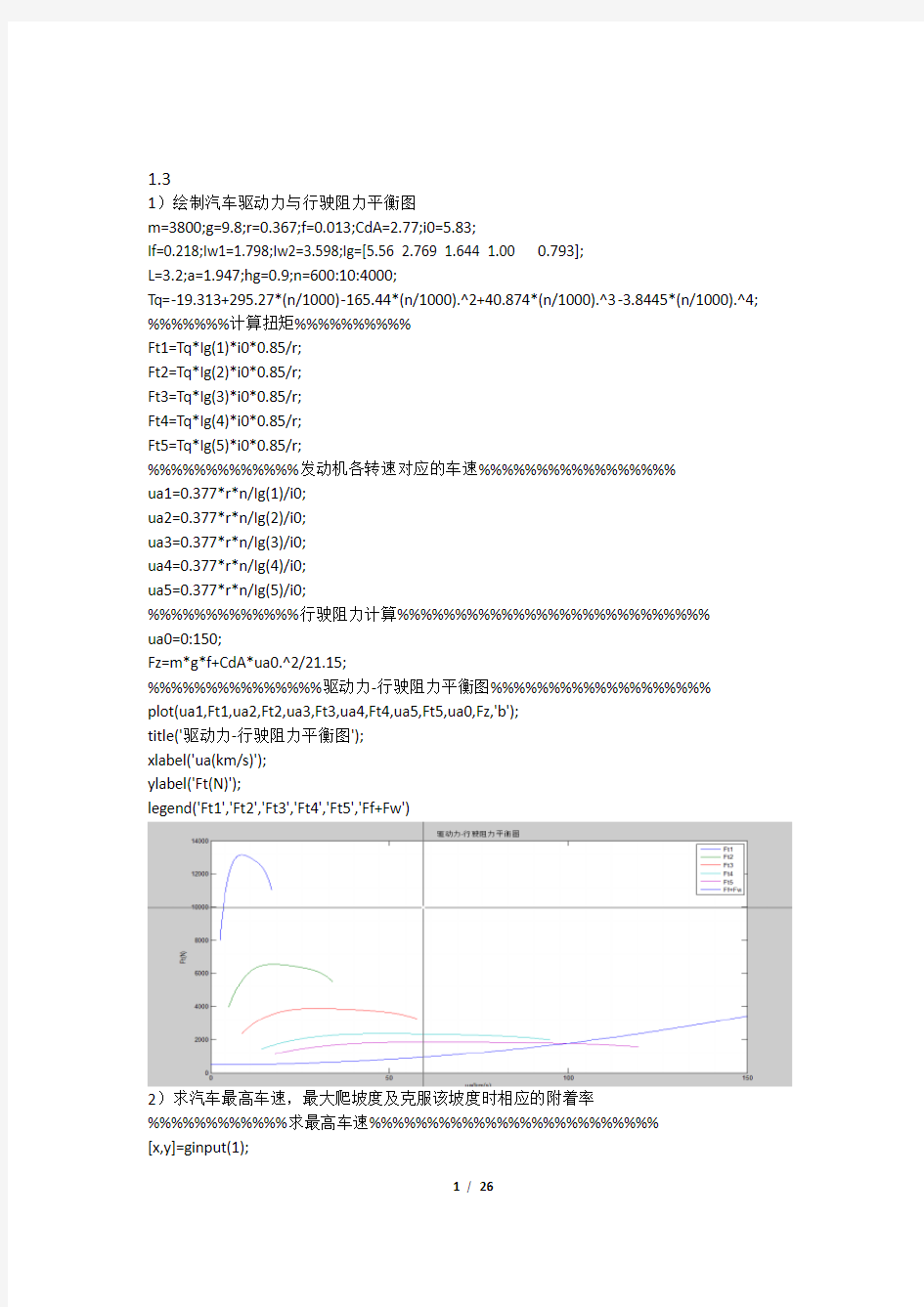
1)绘制汽车驱动力与行驶阻力平衡图
m=3800;g=9.8;r=0.367;f=0.013;CdA=2.77;i0=5.83;
If=0.218;Iw1=1.798;Iw2=3.598;Ig=[5.56 2.769 1.644 1.00 0.793];
L=3.2;a=1.947;hg=0.9;n=600:10:4000;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; %%%%%%%计算扭矩%%%%%%%%%%
Ft1=Tq*Ig(1)*i0*0.85/r;
Ft2=Tq*Ig(2)*i0*0.85/r;
Ft3=Tq*Ig(3)*i0*0.85/r;
Ft4=Tq*Ig(4)*i0*0.85/r;
Ft5=Tq*Ig(5)*i0*0.85/r;
%%%%%%%%%%%%%发动机各转速对应的车速%%%%%%%%%%%%%%%%%
ua1=0.377*r*n/Ig(1)/i0;
ua2=0.377*r*n/Ig(2)/i0;
ua3=0.377*r*n/Ig(3)/i0;
ua4=0.377*r*n/Ig(4)/i0;
ua5=0.377*r*n/Ig(5)/i0;
%%%%%%%%%%%%%行驶阻力计算%%%%%%%%%%%%%%%%%%%%%%%%%%%
ua0=0:150;
Fz=m*g*f+CdA*ua0.^2/21.15;
%%%%%%%%%%%%%%%驱动力-行驶阻力平衡图%%%%%%%%%%%%%%%%%%%
plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua0,Fz,'b');
title('驱动力-行驶阻力平衡图');
xlabel('ua(km/s)');
ylabel('Ft(N)');
legend('Ft1','Ft2','Ft3','Ft4','Ft5','Ff+Fw')
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率%%%%%%%%%%%%求最高车速%%%%%%%%%%%%%%%%%%%%%%%%%
[x,y]=ginput(1);
disp('汽车最高车速=');disp(x);disp('km/h');
%%%%%%%%%%%%求汽车的最大爬坡度%%%%%%%%%%%%%%%%
Ff=m*g*f;
Fw=CdA*ua1.^2/21.15;
imax=tan(asin(max(Ft1-Ff-Fw)/m/g));
disp('汽车最大爬坡度=');
disp(imax);
%%%%%%%%%%%%%求汽车的附着率%%%%%%%%%%%%%%%%
q=imax;
C2=q/(a/L+hg*q/L);
disp('假设后轮驱动,最大爬坡度相应的附着率=');
disp(C2);
C1=q/((L-a)/L-hg*q/L);
disp('假设前轮驱动,最大爬坡度相应的附着率=');
disp(C1);
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间%%%%%%%%%%%%%%%%%加速时间曲线%%%%%%%%%%%%%%%%%%%%%%%%%
data1=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(1)^2*i0^2*0.85)/(m*r^2);
data2=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(2)^2*i0^2*0.85)/(m*r^2);
data3=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(3)^2*i0^2*0.85)/(m*r^2);
data4=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(4)^2*i0^2*0.85)/(m*r^2);
data5=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(5)^2*i0^2*0.85)/(m*r^2);
Fw1=CdA*ua1.^2/21.15;
Fw2=CdA*ua2.^2/21.15;
Fw3=CdA*ua3.^2/21.15;
Fw4=CdA*ua4.^2/21.15;
Fw5=CdA*ua5.^2/21.15;
a1=1./((Ft1-Ff-Fw1)/(data1*m));
a2=1./((Ft2-Ff-Fw2)/(data2*m));
a3=1./((Ft3-Ff-Fw3)/(data3*m));
a4=1./((Ft4-Ff-Fw4)/(data4*m));
a5=1./((Ft5-Ff-Fw5)/(data5*m));
plot(ua1,a1,ua2,a2,ua3,a3,ua4,a4,ua5,a5);
axis([0 99 0 10]);
title('汽车的加速度倒数曲线');
xlabel('ua(km/h)');
ylabel('1/a');
gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');
%%%%%%%%%%%%%%%车速时间曲线%%%%%%%%%
u1=0.377*r*600./Ig/i0;
u2=0.377*r*4000./Ig/i0;
data=0*Ig;
for i=1:5
data(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(Ig(i))^2*i0^2*0.85)/(m*r^2);
end
ua=6:0.01:99;N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;
Ff=m*g*f;
Fw=CdA*ua.^2/21.15;
for i=1:N
k=i;
if ua(i)<=u2(2)
n=ua(i)*(Ig(2)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*Ig(2)*i0*0.85/r;
inv_a(i)=(data(2)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
elseif ua(i)<=u2(3)
n=ua(i)*(Ig(3)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*Ig(3)*i0*0.85/r;
inv_a(i)=(data(3)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
elseif ua(i)<=u2(4)
n=ua(i)*(Ig(4)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*Ig(4)*i0*0.85/r;
inv_a(i)=(data(4)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
else
n=ua(i)*(Ig(5)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*Ig(5)*i0*0.85/r;
inv_a(i)=(data(5)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
end
a0=delta(1:k);
t(i)=sum(a0);
end
plot(t,ua);
axis([0 80 0 100]);
title('汽车2档原地起步换挡加速时间曲线');
xlabel('时间t(s)');
ylabel('速度ua(km/h)');
[x1,y1]=ginput(1);
disp('汽车加速时间=');disp(x1);disp('s');
2.7
1)汽车功率平衡图
%%%%%%%%%%%%%%%%%功率平衡图%%%%%%%%%%%%%%%%%%%%%%%%%% Pe1=Tq.*Ig(1)*i0.*ua1./(3600*r);
Pe2=Tq.*Ig(2)*i0.*ua2./(3600*r);
Pe3=Tq.*Ig(3)*i0.*ua3./(3600*r);
Pe4=Tq.*Ig(4)*i0.*ua4./(3600*r);
Pe5=Tq.*Ig(5)*i0.*ua5./(3600*r);
Pe=max(Pe1);
Pf=m*g*f*ua0/3600;
Pw=CdA*ua0.^3/76140;
P=(Pw+Pf)./0.85;
plot(ua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua0,P,ua0,Pe);
axis([0 120 0 80]);
title('汽车功率平衡图');
xlabel('ua(km/h)');
ylabel('Pe(kw)');
gtext('1'),gtext('2'),gtext('3'),gtext('4'),gtext('5'),gtext('(Pf+Pw)/et'),gtext('Pe');
2)最高档与次高档的等速百公里油耗曲线。
%%%%%%等速百公里油耗%%%%%%%%%%%%%%
n0=[815 1207 1614 2012 2603 3006 3403 3804];
B00=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];
B10=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];
B20=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];
B30=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];
B40=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];
B0=spline(n0,B00,n);
B1=spline(n0,B10,n);
B2=spline(n0,B20,n);
B3=spline(n0,B30,n);
B4=spline(n0,B40,n);
P4=(m*g*f*ua4/3600+CdA*ua4.^3/76140)/0.85;
P5=(m*g*f*ua5/3600+CdA*ua5.^3/76140)/0.85;
for i=1:1:100
b4(i)=B0(i)+B1(i)*P4(i)+B2(i)*P4(i).^2+B3(i)*P4(i).^3+B4(i)*P4(i).^4;
b5(i)=B0(i)+B1(i)*P5(i)+B2(i)*P5(i).^2+B3(i)*P5(i).^3+B4(i)*P5(i).^4;
end
pg=7.0;
Q4=P4.*b4./(1.02.*ua4.*pg);
Q5=P5.*b5./(1.02.*ua5.*pg);
plot(ua4,Q4,ua5,Q5);
axis([0 100 10 30]);
title('最高档与次高档等速百公里油耗曲线');
xlabel('ua(km/h)');
ylabel('百公里油耗(L/100km)');
gtext('4'),gtext('5');
3.1
改变1.3题中轻型货车的主减速器传动比,做出0i
为5.17、5.43、5.83、6.17、6.33时的燃油经济性—加速时间曲线
%%%%%%%%%%%%燃油经济性---加速时间曲线%%%%%%%%%%%%% I0=[5.17,5.43,5.83,6.17,6.33]; %%%%%求加速时间 for i=1:1:5
y(i)=jiasushijian(I0(i)); end y;
%%%%求对应I0的六工况百公里油耗 for i=1:1:5
b(i)=youhao(I0(i)); end b;
plot(b,y,'+r')
b1=linspace(b(1),b(5),100); y1=spline(b,y,b1); plot(b1,y1);
title('燃油经济性—加速时间曲线'); xlabel('百公里油耗(L/100km)'); ylabel('加速时间s');
gtext('I0=5.17'),gtext('I0=5.43'),gtext('I0=5.83'),gtext('I0=6.17'),gtext('I0=6.33');
%%%%%%%%%%%子程序%%%%%%%%%%%%%%%%%%%%
%%%%%求加速时间函数
function y=jiasushijian(I0)
n1=linspace(0,5000);
nmax=4000;
nmin=600;
r=0.367;
Nt=0.85;
CdA=2.77;
f=0.013;
G=(3880)*9.8;
ig=[6.09,3.09,1.71,1.00];
%%%%计算各个档位的最大速度与最小速度
for i=1:1:4
uamax(i)=chesu(nmax,r,ig(i),I0);
uamin(i)=chesu(nmin,r,ig(i),I0);
ua(i,:)=linspace(uamin(i),uamax(i),100);
n(i,:)=zhuansu(ua(i,:),r,ig(i),I0);
Ttq(i,:)=zhuanju(n(i,:));
Ft(i,:)=qudongli(Ttq(i,:),ig(i),I0,Nt,r);
F(i,:)=f*G+CdA*(ua(i,:).^2)/21.15;
delta(i,:)=1+(1.798+3.598+0.218*(ig(i)^2)*(I0^2)*Nt)/(3880*r^2);
a(i,:)=1./(delta(i,:).*3880./(Ft(i,:)-F(i,:)));
F2(i,:)=Ft(i,:)-F(i,:);
end
%%%%%%%%%%%求出加速时间
temp1(1,:)=ua(2,:)/3.6;
temp1(2,:)=1./a(2,:);
n1=1;
for j1=1:1:100
if ua(3,j1)>max(ua(2,:))&&ua(3,j1)<=70
temp2(1,n1)=ua(3,j1)/3.6;
temp2(2,n1)=1./a(3,j1);
n1=n1+1;
end
end
n2=1;
for j1=1:1:100
if ua(4,j1)>max(ua(3,:))&&ua(4,j1)<=70;
temp3(1,n2)=ua(4,j1)/3.6;
temp3(2,n2)=1./a(4,j1);
n2=n2+1;
end
end
y=temp1(1,1)*temp1(2,1)+qiuji(temp1(1,:),temp1(2,:))+qiuji(temp2(1,:),temp2(2,:))+qiuji(temp3(
1,:),temp3(2,:));
end
%%%%%%%%%%%由转速计算车速
function ua=chesu(n,r,ig,I0);
ua=0.377*r.*n/(ig*I0);
%%%%%%%%%%%%%%%%求转速
function n=zhuansu(ua,r,ig,I0);
n=ig*I0.*ua./(0.377*r);
end
%%%%%%%%%%%%%%求转矩函数
function y=zhuanju(n);
y=-19.313+295.27.*(n./1000)-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;
%%%%%%%%%%%%%%求驱动力函数
function y=qudongli(Ttq,ig,I0,Nt,r);
y=(ig*I0*Nt.*Ttq)/r;
end
%%%%%%%%%%%%%%%求积分函数
function p=qiuji(x0,y0)
n0=size(x0);
n=n0(2);
x=linspace(x0(1),x0(n),200) ;
y=spline(x0,y0,x);
% figure;plot(x,y);
p=trapz(x,y) ;
end
%%%%%%%%%%求不同I0下的六工况油耗
function b=youhao(I0);
global f G CdA Nt m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n %声明全局变量
ig=[6.09,3.09,1.71,1.00];r=0.367;
Nt=0.85;CdA=2.77;f=0.013;%I0=5.83;
G=(3880)*9.8;If=0.218;Iw1=1.798;Iw2=3.598;m=3880; %汽车的基本参数设定
n0=[815 1207 1614 2012 2603 3006 3403 3804];
B00=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];
B10=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];
B20=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];
B30=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];
B40=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];
n=600:1:4000;
B0=spline(n0,B00,n);
B1=spline(n0,B10,n);
B2=spline(n0,B20,n); %使用三次样条插值,保证曲线的光滑连续
B3=spline(n0,B30,n);
B4=spline(n0,B40,n);
ua4=0.377*r.*n./(I0*ig(4)); %求出发动机转速范围内对应的III、IV档车速
F4=f*G+CdA*(ua4.^2)/21.15; %求出滚动阻力和空气阻力的和
P_fw4=F4.*ua4./(Nt*3.6*1000); %求出阻力功率
for i=1:1:3401 %用拟合公式求出各个燃油消耗率
b4(i)=B0(i)+B1(i)*P_fw4(i)+B2(i)*(P_fw4(i))^2+B3(i)*(P_fw4(i))^3+B4(i)*(P_fw4(i))^4; end
pg=7.06; %汽油的重度取7.06N/L
ua4_m=[25,40,50]; %匀速阶段的车速
s_m=[50,250,250]; %每段匀速走过的距离
b4_m=spline(ua4,b4,ua4_m); %插值得出对应速度的燃油消耗率
F4_m=f*G+CdA*(ua4_m.^2)/21.15; %车速对应的阻力
P_fw4_m=F4_m.*ua4_m./(Nt*3.6*1000); %发动机功率
Q4_m=P_fw4_m.*b4_m.*s_m./(102.*ua4_m.*pg) ;
Q4_a1=jiasu(40,25,ig(4),0.25,ua4,I0);
Q4_a2=jiasu(50,40,ig(4),0.2,ua4,I0);
Qid=0.299;tid=19.3;s=1075;
Q_i=Qid*tid; %求出减速阶段的燃油消耗量
Q4all=(sum(Q4_m)+Q4_a1+Q4_a2+Q_i)*100/s; %IV档六工况百公里燃油消耗量b=Q4all;
%加速阶段处理函数
function q=jiasu(umax,umin,ig,a,ua0,I0);
global f G CdA Nt m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n; %I0 ;
ua1=umin:1:umax; %把速度范围以1km/h为间隔进行划分
delta=1+(Iw1+Iw2)/(m*r^2)+(If*ig^2*I0^2*Nt)/(m*r^2);
P0=(G*f.*ua0./3600+CdA.*ua0.^3/76140+(delta*m.*ua0/3600)*a)/Nt;
P=(G*f.*ua1/3600+CdA.*ua1.^3/76140+(delta*m.*ua1/3600)*a)/Nt;
dt=1/(3.6*a) ; %速度每增加1km/h所需要的时间
for i=1:1:3401 %重新利用拟合公式求出b与ua的关系
b0(i)=B0(i)+B1(i)*P0(i)+B2(i)*(P0(i))^2+B3(i)*(P0(i))^3+B4(i)*(P0(i))^4;
end
b1=interp1(ua0,b0,ua1); %插值出各个速度节点的燃油消耗率
Qt=P.*b1./(367.1.*pg); %求出各个速度节点的燃油消耗率
i1=size(Qt);
i=i1(2);
Qt1=Qt(2:i-1);
q=(Qt(1)+Qt(i))*dt./2+sum(Qt1)*dt; %求该加速阶段的燃油消耗量
4.3
1)计算并绘制利用附着系数曲线和制动效率曲线%%%%%%%%%%%%%%%%利用附着系数%%%%%%%%%%%%%%
m0=4080;hg0=0.845;L0=3.950;a0=2.10;beta0=0.38;b0=L0-a0;%空载时的参数
m1=9290;hg1=1.170;L1=3.950;a1=2.950;beta1=0.38;b1=L1-a1;%满载时的参数
z=0:0.01:1.0;
figure(1);
fai=z;
fai_f0=beta0*z*L0./(b0+z*hg0);%空载时前轴的φf
fai_f1=beta1*z*L1./(b1+z*hg1);%满载时前轴的φf
fai_r0=(1-beta0)*z*L0./(a0-z*hg0);%空载时后轴的φr
fai_r1=(1-beta1)*z*L1./(a1-z*hg1);%满载时后轴的φr
plot(z,fai_f0,'--',z,fai_f1,z,fai_r0,'--',z,fai_r1,z,fai);
axis([0 1 0 1]);
title('利用附着系数与制动强度的关系曲线');
xlabel('制动强度(z/g)');
ylabel('利用附着系数φ');
gtext('φr(空载)'),gtext('φr(满载)'),gtext('φ=z'),gtext('φf(空载)'),gtext('φf(满载)');
%%%%%%%%%%%%%%%%%%%制动效率%%%%%%%%%%%%%%%%%%%%
figure(2);
Ef0=z./fai_f0*100;%%%%前轴空载
Ef1=z./fai_f1*100;%前轴满载
Er0=z./fai_r0*100;%后轴空载
Er1=z./fai_r1*100;%后轴满载
plot(fai_f0,Ef0,'b',fai_f1,Ef1,'r',fai_r0,Er0,'b',fai_r1,Er1,'r');
axis([0 1 0 100]);
title('前.后制动效率曲线');
xlabel('附着系数φ');
ylabel('制动效率%');
gtext('Ef'),gtext('Er'),gtext('Er'),gtext('满载'),gtext('空载');
2)求行驶车速Ua=30km/h,在
?=0.80路面上车轮不抱死的制动距离。计算时取制动系
反应时间
'
2
τ
=0.02s,制动减速度上升时间
''
2
τ
=0.02s。
%%%%%%%%%%%%%%%%%%%%%%%制动距离%%%%%%%%%%%%%%
t1=0.02;t2=0.02;ua0=30;fai0=0.80;g=9.8;
ak1=Er0(80)*fai0*g/100;%空载制动减速度---0.8---后轴
am1=Er1(80)*fai0*g/100;%满载
s0=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*ak1);%空载制动距离
s1=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*am1);
disp('空载时,汽车制动距离s0=');
disp(s0);
disp('满载时,汽车制动距离s1=');
disp(s1);
3)求制动系前部管路损坏时汽车的制动距离s,制动系后部管路损坏时汽车的制动距离's
%%%%%%%%%%%%%%制动器损坏,汽车制动距离%%%%%%%%%%%%%%%
ak2=fai0*g*a0/(L0+fai0*hg0);
am2=fai0*g*a1/(L1+fai0*hg1);
ak3=fai0*g*b0/(L0-fai0*hg0);
am3=fai0*g*b1/(L0-fai0*hg1);
Sk2=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*ak2);%制动距离
Sm2=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*am2);
Sk3=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*ak3);
Sm3=(t1+t2/2)*ua0/3.6+ua0^2/(25.92*am3);
disp('空载时,前制动器损坏,汽车制动距离Sk2=');
disp(Sk2);
disp('满载时,前制动器损坏,汽车制动距离Sm2=');
disp(Sm2);
disp('空载时,后制动器损坏,汽车制动距离Sk3=');
disp(Sk3);
disp('满载时,后制动器损坏,汽车制动距离Sm3=');
disp(Sm3);
5.11
1)稳定性因数K 、特征车速uch m=1818.2;Iz=3885;L=3.048; a=1.463;b=1.585;k1=-62618;
k2=-110185;i=20;g=9.8;R0=15;u1=30.56; K=m*(a/k2-b/k1)/L^2; Uch=(1/K)^(1/2);
disp('稳定性因数(s^2/m^2)K='); disp(K);
disp('特征车速(m/s)Uch='); disp(Uch);
2)稳态横摆角速度增益曲线a s r u -???δω、车速u=22.35m/s 时的转向灵敏度sw r
δω
u=0:0.05:30;
S=u./(L*(1+K*u.^2));%稳态横摆角速度增益 plot(u,S);
title('汽车稳态横摆角速度增益曲线'); xlabel('车速u(m/s)');
ylabel('稳态横摆角速度增益');
disp('u=22.35m/s 时,转向灵敏度为'); disp(S(448));
3)静态储备系数S.M.,侧向加速度为0.4g 时的前、后轮侧偏角绝对值之差21αα-与转弯半
径的比值R/R0(R0=15m) SM=k2/(k1+k2)-a/L;
ay=0.4*g;
A=K*ay*L;
B=L/R0;
R=L/(B-A);
C=R/R0;%转弯半径比
disp('静态储备系数S.M.=');
disp(SM);
disp('侧向加速度为0.4g时前、后轮侧偏角绝对值之差(rad) a1-a2=');
disp(A);
disp('侧向加速度为0.4g时转弯半径比值R/R0=');
disp(C);
4)车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率0ω、阻尼比ζ、反应时间τ与峰值反应时间ε
W0=L/u1*(k1*k2/(m*Iz)*(1+K*u1^2))^(1/2);
D=(-m*(k1*a^2+k2*b^2)-Iz*(k1+k2))/(2*L*(m*Iz*k1*k2*(1+K*u1^2))^(1/2));
t=atan((1-D^2)^(1/2)/(-m*u1*a*W0/(L*k2)-D))/(W0*(1-D^2)^(1/2));
E=atan((1-D^2)^(1/2)/D)/(W0*(1-D^2)^(1/2))+t;
disp('车速u=30.56m/s时的瞬态响应参数分别为:');
disp('横摆角速度波动的固有(圆)频率(rad)为');
disp(W0);
disp('阻尼比为');
disp(D);
disp('反应时间(s)为');
disp(t);
disp('峰值反应时间(s)为');
disp(E);
6.5
1) 计算并画出幅频特性
q
z /1、
1
2/z z 、
2
/z q 和均方根值谱
()
f G z 1 、
()
f G z 2 、
()
f G a 谱图。进一步计算
aw w a z
z q L a 、、、、、σσσσ2
1
值
yps=0.25;gama=9;mu=10;fs=3;ypss=0.25;g=9.8;
a0=10^(-6);f0=1.5; ua=20;Gqn0=2.56*10^(-8); n0=0.1;detaf=0.2;N=180;f=detaf*[0:N]; lamta=f/f0;lamtas=f/fs;Wf=0*f;
deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/mu+1)*lamta.^2).^2;
z1_q=gama*sqrt(((1-lamta.^2).^2+4*yps^2*lamta.^2)./deta);
z2_z1=sqrt((1+4*yps^2*lamta.^2)./((1-lamta.^2).^2+4*yps^2*lamta.^2)); p_z2=sqrt((1+(2*ypss*lamtas).^2)./((1-lamtas.^2).^2+(2*ypss*lamtas).^2)); z2_q=gama*sqrt((1+4*yps^2*lamta.^2)./deta); p_q=p_z2.*z2_q;
jfg_Gqddf=4*pi^2*sqrt(Gqn0*n0^2*ua)*f; jfg_Gzdd1f=z1_q.*jfg_Gqddf; jfg_Gzdd2f=z2_q.*jfg_Gqddf; jfg_Gaf=p_q.*jfg_Gqddf;
sigmaqdd=sqrt(trapz(f,jfg_Gqddf.^2)); sigmazdd1=sqrt(trapz(f,jfg_Gzdd1f.^2)); sigmazdd2=sqrt(trapz(f,jfg_Gzdd2f.^2)); sigmaa=sqrt(trapz(f,jfg_Gaf.^2)); for i=1:(N+1) if f(i)<=2
Wf(i)=0.5; elseif f(i)<=4 Wf(i)=f(i)/4; elseif f(i)<=12.5 Wf(i)=1; else
Wf(i)=12.5/f(i); end end
kk=Wf.^2.*jfg_Gaf.^2;
aw=sqrt(trapz(f,kk));%加权加速度均方根值 Law=20*log10(aw/a0);%加权振级
disp('路面不平度加速度均方根值为');disp(sigmaqdd); disp('车轮加速度均方根值为');disp(sigmazdd1); disp('车身加速度均方根值为');disp(sigmazdd2); disp('人体加速度均方根值为');disp(sigmaa); disp('加权加速度均方根值为');disp(aw); disp('加权振级');disp(Law);
figure(1)
plot(f,z1_q),title('幅频特性|z1/q|, (f=1.5Hz, ζ=0.25,γ=9,μ=10)'),xlabel('激振频率
f/Hz'),ylabel('|z1/q|');
figure(2)
plot(f,z2_z1),title('幅频特性|z2/z1|,(f=1.5Hz, ζ=0.25,γ=9,μ=10)'),xlabel('激振频率
f/Hz'),ylabel('|z2/z1|');
figure(3)
plot(f,p_z2),title('幅频特性|p/z2|,(fs=1.5Hz, ζs=0.25)'),xlabel('激振频率f/Hz'),ylabel('|p/z2|'); figure(4)
plot(f,jfg_Gzdd1f),title('车轮加速度均方根值√Gz1(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz1(f)');
figure(5)
plot(f,jfg_Gzdd2f),title('车身加速度均方根值√Gz2(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz2(f)');
figure(6)
plot(f,jfg_Gaf),title('人体加速度均方根值√Ga(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Ga(f)');
2) 改变“人体-座椅”系统参数:5.0~125.0,6~5.1==s s Hz f ζ。分析aw w L a 、值随
s s f ζ、的变化
for i=1:(N+1) if f(i)<=2
Wf(i)=0.5; elseif f(i)<=4 Wf(i)=f(i)/4; elseif f(i)<=12.5 Wf(i)=1; else
Wf(i)=12.5/f(i); end end
fs=3;ypss=0.25;
ypss0=[0.125:0.005:0.5];a=0*ypss0;La=0*ypss0; M=length(ypss0); for i=1:M
yps=ypss0(i);
lamtas=f/fs;
deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/mu+1)*lamta. ^2).^2;
p_z2=sqrt((1+(2*ypss*lamtas).^2)./((1-lamtas.^2).^2+(2*ypss*lamtas).^2));
z2_q=gama*sqrt((1+4*yps^2*lamta.^2)./deta);
p_q=p_z2.*z2_q;
jfg_Gqddf=4*pi^2*sqrt(Gqn0*n0^2*ua)*f;
jfg_Gaf=p_q.*jfg_Gqddf;
kk=Wf.^2.*jfg_Gaf.^2;
aw(i)=sqrt(trapz(f,kk));
end
Law=20*log10(aw/a0);
figure(7)
plot(ypss0,aw);title('aw随ζs的变化'),xlabel('“人体—座椅”系统的阻尼比ζ
s'),ylabel('aw/m*s^-2');
figure(8)
plot(ypss0,Law);title('Law随ζs的变化'),xlabel('“人体—座椅”系统的阻尼比ζ
s'),ylabel('Law/dB');
汽车模型的背景、现状与前景
汽车模型的背景、现状与前景 1927年美国通用汽车公司将油泥应用到汽车设计开发模型上,1955年日本首次使用工业油泥进行汽车模型的设计开发,我国则在70年代初开始应用这一技术。汽车模型工是在80年代初期形成的,目前从业人员大约有1000多人,分布在全国20多个省100多家汽车生产企业。 汽车模型工是设计师与工程师之间的桥梁,没有这个桥梁汽车设计将无法进行。由于汽车车身设计程序要经过汽车效果图、小比例模型制作、1:1模型制作、模型数据采集、修线修面、结构设计等设计过程,因此汽车模型工水平的高低将直接影响到汽车产品开发的进度和质量。一个1:1的汽车油泥模型需要四人同时制作,制作周期为3-4个月,1:1内饰模型需要两人同时制作,制作周期为2-3个月,小比例模型制作周期为2个月。一般规模的汽车生产企业一年能开发2个或更多个新产品。 在欧美国家,汽车模型工可在专门的职业培训机构进行系统培训,在日本也有一些职业培训学校开设了汽车模型工的专业课程。国内目前没有专门的汽车模型工职业培训学校,汽车模型工都是各汽车厂内部自己培养的技术工人。一些有条件的汽车厂,如:解放汽车公司、东风汽车公司只能将该厂的汽车模型工送到国外进行培训,或通过国外代理商组织的专业培训班来提高技术水平。如,日本在中国的汽车模型工代理商每年在上海举办一次汽车模型工培训班,为国内汽车厂家培训了大批的汽车模型工。一方面,企业不可能大批量的培养人才,导致了汽车模型工人才的紧缺,使得国内很多的汽车生产企业无自主产品开发能力;另一方面,国内的汽车模型工与国外的汽车模型工的技术水平相比较还有很大的差距,从而限制了我国汽车工业的发展。
基于MATLAB的汽车平顺性的建模与仿真
(1) 基于MATLAB 的汽车平顺性的建模与仿真 车辆工程专硕1601 Z1604050 晨 1. 数学建模过程 1.1建立系统微分方程 如下图所示,为车身与车轮二自由度振动系统模型: 图中,m2为悬挂质量(车身质量);m1为非悬挂质量(车轮质量);K 为弹簧刚度;C 为减振器阻尼系数;Kt 为轮胎刚度;z1为车轮垂直位移;z2为车身垂直位移;q 为路面不平度。 车轮与车身垂直位移坐标为z1、z2,坐标原点选在各自的平衡位置,其运动方程为: 222121 ()()0m z C z z K z z +-+-=1112121()()()0t m z C z z K z z K z q +-+-+-=
(2) (3) (4) (5) (6) 1.2双质量系统的传递特性 先求双质量系统的频率响应函数,将有关各复振幅代入,得: 令: 232t A m j C K K ωω=-+++ 由式(2)得z 2-z 1的频率响应函数: 将式(4)代入式(3)得z 1-q 的频率响应函数: 式中: 下面综合分析车身与车轮双质量系统的传递特性。车身位移z 2对路面位移q 的频率响应函数,由式(4)及(5)两个环节的频率响应函数相乘得到: 2221()() z m j C K z j C K ωωω-++=+2111()()t t z m j C K K z j C K qK ωωω-+++=++1A j C K ω=+K C j m A ++-=ωω222212 122 z A j C K z m K j C A ωωω+==-++2321 N A A A =-212211=t t A K A K z z z A q z q A N N ==
汽车模型制作过程报告
汽车模型制作过程报告 一、泥模的制作 1、泥模内的支撑物 初期选择了砖头,优点是稳固坚硬,缺点是不方便上泥,砖头吸水导致泥模很快干裂。最终选择泡沫。做成车的大概形状。 2、先确定比例为1:8,根据实际尺寸按比例计算出模型的尺寸,规定中线。 3、上泥 首先用手掌大块的上泥做出车的大体形状。在制作期间对整体形状的把握不够,导致模型不对称,形状与实际不符,进行了大范围的修改。在多次调整之后整体形状基本符合。最后结合各种工具和实际车型(奥迪Q7)的图片进行细节的刻画。锻炼了我们的细节观察能力和动手能力。 二、石膏模型的制作 1、制作石膏泥子。 先盛一盆水,一人捧石膏粉,另一人不断搅拌,直到调和均匀并且粘度合适。这个过程我们不断尝试并总结经验,最终调出了合适的石膏泥子,掌握了适当的比例和调制方法。 2、从泥模制作石膏模。 我们选择将模型分三部分制作,首先将泥模上涂满洗发水作为泥和石膏之间的分离剂。然后将泥模固定在墙边,使用挡板,泥,将泥模周围空间分成三部分,将调制好的石膏泥子小心灌入。等待石膏变干晾晒若干周。 3、拆分石膏模 将石膏内的泥全部取出,用刷子刷干净石膏上残留的泥和石膏粉,并用绳子固定三部分石膏模型成为一个整体。 三、玻璃钢的制作 1、石膏内部涂洗发水作为分离玻璃钢和石膏的分模剂,要刷均匀。 2、树脂和催化剂固化剂调制,比例为1:20。 3、在石膏模型内部涂抹调制好的树脂,涂抹均匀后铺满玻璃丝布,反复三次。 4、晾晒若干天。 四、玻璃钢的拆分和打磨 1、拆分。 使用锤子等工具将玻璃钢外部的石膏模型砸碎,取出玻璃钢模型。 2、切割和打磨。 首先使用工具将玻璃钢模型周围的多余部分切除,并尝试用白醋洗去玻璃钢表面的石膏,有一定效果。然后使用打磨工具打磨。最后用粗砂纸和细砂纸进行细致的打磨。期间锻炼了我们使用工具的动手能力,掌握了一些切割工具的使用。 五、喷漆
汽车理论课后习题Matlab程序
1.3确定一轻型货车的动力性能(货车可装用 4挡或5挡变速器,任选 其中的一种进行整车性能计算): 1) 绘制汽车驱动力与行驶阻力平衡图。 2) 求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。 3) 绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用 2档起步加速行 驶至70km/h 的车速一时间曲线,或者用计算机求汽车用 2档起步加速行驶至 70km/h 的加速时间。 轻型货车的有关数据: 汽油发动机使用外特性的Tq-n 曲线的拟合公式为 19.313 295.27(孟o )165,44(^)2 40-874(^)3 环45為4 式中,Tq 为发动机转矩(N?m ) ;n 为发动机转速(r/min )。 发动 机的最低转速n min =600r/min,最高转速n max =4000r/min 。 装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径 0.367m 传动系机械效率 n =0.85 滚动阻力系数 f=0.013 空气阻力系数泌风面积 C D A=2.77m 2 解:Matlab 程序: (1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=[600:10:4000]; Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3-3.8445*( n/10 00).A 4; m=3880;g=9.8; nmi n=600; nm ax=4000; G=m*g; ig=[5.56 2.769 1.644 1.00 0.793]; nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;Iw2=3.598; Ft 仁 Tq*ig(1)*i0* nT/r; Ft2=Tq*ig(2)*i0* nT/r; 主减速器传动比 飞轮转动惯量 二前轮转动惯量 四后轮转动惯量 i 0=5.83 l f =0.218kg?m I w1=1.798kg?nf I w2=3.598kg?m ig(数据如下表) 轴距 质心至前轴距离(满载) 质心高(满载) a=1.974m hg=0.9m
基于MATLAB的汽车振动控制仿真
摘要 机械振动主要是谐波,阻尼,强制三种。对于三个振动模型,列出了振动方程,然后给出了三个振动的初始条件。在模拟过程中产生的一系列速度和汽车行驶时候产生的振动,势能和机械能的三个功能可以通过MATLAB函数模拟,以随时间改变图像。然后,我们可以经过一系列的计算的出我们需要的函数方程和一些弹簧模拟图像,在后面可以进行一系列的导数计算,在MATLAB软件中可以画出不同的位移,汽车造成的损坏的函数图像,再通过在MATLAB的绘制,可以简单明细的看出汽车振动的能量变化。最后再比较不同的图像,可以得出不同的结果,可以进行汽车改良。就可以探索出最佳的方法来研究汽仿真。 关键词:简谐振动阻尼振动评价系数仿真软件。
Abstract Mechanical vibration is mainly harmonic, damping, forced three. For the three vibration models, the vibration equations are listed, and then the initial conditions for the three vibrations are given. The three functions produced during the simulation process and the three functions of vibration, potential energy and mechanical energy generated when the vehicle travels can be simulated by MATLAB functions to change the image over time. Then we can go through a series of calculations out of the functional equations we need and some of the spring simulations of the image, which can be followed by a series of derivative calculations that can be plotted in the MATLAB software for different displacements, , And then through the drawing in MATLAB, you can simply see the details of the car vibration energy changes. Finally compare the different images, you can get different results, you can improve the car. You can explore the best way to study the steam simulation. Keywords:simple harmonic oscillationdamping oscillationappraisement coefficientsimulation software.
汽车理论课后习题Matlab程序
1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选 其中的一种进行整车性能计算): 1)绘制汽车驱动力与行驶阻力平衡图。 2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。 3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h 的加速时间。 轻型货车的有关数据: 汽油发动机使用外特性的Tq-n 曲线的拟合公式为 234 19.313295.27()165.44()40.874() 3.8445()1000100010001000 q n n n n T =-+-+- 式中,Tq 为发动机转矩(N?m);n 为发动机转速(r/min )。 发动机的最低转速n min =600r/min,最高转速n max =4000r/min 。 装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径 0.367m 传动系机械效率 ηt =0.85 滚动阻力系数 f =0.013 空气阻力系数×迎风面积 C D A =2.77m 2 主减速器传动比 i 0=5.83 飞轮转动惯量 I f =0.218kg?m 2 二前轮转动惯量 I w1=1.798kg ?m 2 四后轮转动惯量 I w2=3.598kg?m 2
变速器传动比ig(数据如下表) 轴距L=3.2m 质心至前轴距离(满载)a=1.974m 质心高(满载)hg=0.9m 解:Matlab程序: (1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=[600:10:4000]; Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3 .8445*(n/1000).^4; m=3880;g=9.8;nmin=600;nmax=4000; G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598; Ft1=Tq*ig(1)*i0*nT/r; Ft2=Tq*ig(2)*i0*nT/r; Ft3=Tq*ig(3)*i0*nT/r; Ft4=Tq*ig(4)*i0*nT/r;
基于MATLAB的汽车运动控制系统设计仿真
课程设计 题目汽车运动控制系统仿真设计学院计算机科学与信息工程学院班级2010级自动化班 姜木北:2010133*** 小组成员 指导教师吴 2013 年12 月13 日
汽车运动控制系统仿真设计 10级自动化2班姜鹏2010133234 目录 摘要 (3) 一、课设目的 (4) 二、控制对象分析 (4) 2.1、控制设计对象结构示意图 (4) 2.2、机构特征 (4) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (5) 4.1、系统建模 (5) 4.2、系统的开环阶跃响应 (5) 4.3、PID控制器的设计 (6) 4.3.1比例(P)控制器的设计 (7) 4.3.2比例积分(PI)控制器设计 (9) 4.3.3比例积分微分(PID)控制器设计 (10) 五、Simulink控制系统仿真设计及其PID参数整定 (11) 5.1利用Simulink对于传递函数的系统仿真 (11) 5.1.1 输入为600N时,KP=600、KI=100、KD=100 (12) 5.1.2输入为600N时,KP=700、KI=100、KD=100 (12) 5.2 PID参数整定的设计过程 (13) 5.2.1未加校正装置的系统阶跃响应: (13) 5.2.2 PID校正装置设计 (14) 六、收获和体会 (14) 参考文献 (15)
摘要 本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m 文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
汽车模型FrontiArt教大家制作简易纸质汽车模型
汽车模型FrontiArt教大家制作简易纸质汽车模型 纸质汽车模型制作较为容易,模型既可以观赏,又可以进行小型比赛.取材方便,使用下具简单,非常适合车辆模型的人门者制作。笔者介绍的纸质车辆模型制作成功后可以进行滑坡比赛。注意图纸中未标明具休尺寸,可以自己根据材料设计大小。 1.车壳的制作 首先按下图将图纸描在硬卡纸上,再用剪刀将沿轮廓线剪下,最后将图纸上的虚线翻折,如果折边前先用刻刀在虚线上轻划一下,折叠后能够保持线条美观。 2.轴套 为了让纸质车模经久耐用,先要制作4只特制的铜铆钉。方法如下:找一块2毫米厚的环氧纤维板或者铝板、铁板均可,在上面钻4个3毫米的孔,把4只外径3毫米的空心铜铆钉穿过环氧纤维板,用铁锉刀锉去露出的铜铆钉,这样就做成了4只3毫米*2毫米的铜铆钉如下图,这就是纸质车模的轴套。 在纸质车模的轴孔处用3毫米的钻头打洞,由于这4个轴孔关系到前后车轴的平行度,
所以一定要打准。然后把改制过的铜铆钉穿过轴孔处,用一个锥度较大的冲头把铜铆钉铆在轴孔处,如下图。铆接的时候注意不能过紧或过松,只要铜铆钉在轴孔中不晃动就可以了。 3.车轴和车轮 车轴采用六径2毫米的铁丝或钢丝(如自行车辐条),不能有弯曲的现象.可以将截下的自行车辐条放在玻璃板上轻轻地推一下,滚动较远的,属于比较挺直的车轴。反之。则需要另外挑选。车轮可选用既轻又有硬度的材料自行例作,如钙塑板或废弃的塑料海绵拖鞋等。先钻好2毫米的中心孔,然后用一根2毫米的轴把4只车轮固定在一起进行细加工,如下图。这4只车轮的同心度越高,车的滑行性能越好。反之,车模则会出现左右晃动、滑行距离短等 现象。 为了减少车轮与轴套之间的摩擦力.应在车轮内侧与轴套间放置·片内径2毫米的垫片,并在车轮与车轴相互粘接前,用手顺着轴的方向轻轻拉一拉,将轴向间隙调裕至小于0.3毫米,然后用302胶水或百得胶把车抢与车轴粘接起来,注意不要把胶水渗到轴套巾去.如下图. 4.底盘横档 由于纸质车模的底盘比较软,前后轴孔的轴向会产生松动的现象,轴套与车轮之间的间隙会时大时小,而这个间隙关系到车模的滑行距离和滑行方向,因此.必须用较硬的纸张做两只横档,分别粘接在前后轴孔中.以增加底盘的刚性,具体制作如下图。
汽车理论图形MATLAB程序
功率平衡图 m=1230;g=9.8; ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75; r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2; np=6000;Pemax=83; %绘制汽车驱动力与行驶阻力平衡图 for i=1:56; n=500:100:6000; Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3); Tq(i)=9549*Pe(i)/n(i); end for j=1:5 for i=1:56 Ft(i,j)=Tq(i)*ig(j)*i0*yt/r; ua(i,j)=0.377*r*n(i)/(ig(j)*i0); Fz(i,j)=m*g*f+CD*A*(ua(i,j)^2)/21.15; end end figure plot(ua,Ft,ua,Fz); title('汽车驱动力与行驶阻力平衡图'); xlabel('ua(km/h)'); ylabel('Ft(N)'); text(20,6700,'Ft1'); text(40,4000,'Ft2'); text(50,2800,'Ft3'); text(80,2000,'Ft4'); text(100,1600, 'Ft5'); text(100,800,'Ff+Fw'); for k=1:56; n=500:100:6000; Pe(k)=Pemax*(n(k)/np+(n(k)/np)^2-(n(k)/np)^3); Tq(k)=9549*Pe(k)/n(k); Ft(k)=Tq(k)*ig(4)*i0*yt/r; ua(k)=0.377*r*n(k)/(ig(4)*i0); Fz(k)=m*g*f+CD*A*(ua(k)^2)/21.15; E(k)=abs((Ft(k)-Fz(k))); end [Emin,kmin]=min(E); Umax=ua(kmin)
汽车理论1.3和2.7matlab编程答案
孙野 20081268 1.3(1)绘制汽车驱动力与行驶阻力平衡图 选用5挡变速器进行整车性能计算 发动机转速与汽车行驶速度之间的关系:0 377.0i i rn u g a = 发动机使用外特性的T q -n 曲线拟合公式: 4 32)1000 (8445.3)1000(874.40)1000(44.165)1000(27.295313.19n n n n T q -+-+-= 汽车驱动力:r i i T F T g q t η0= 行驶阻力:2 215 .2115.21a D a D j w i f u A C mgf dt du m u A C Gi Gf F F F F +=++ +=+++δ 用matlab 编写程序如下: m1=2000; m2=1800; mz=3880; g=9.81; r=0.367; CdA=2.77; f=0.013; nT=0.85; ig=[5.56 2.769 1.644 1.00 0.793]; i0=5.83; If=0.218; Iw1=1.798; Iw2=3.598; %输入已知参数 Iw=2*Iw1+4*Iw2; for i=1:69 n(i)=(i+11)*50; Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n(i)/1000)^4; end %从600~4000rpm 油拟合公式计算发动机转 距 for j=1:5 for i=1:69 Ft(i,j)=Ttq(i)*ig(j)*i0*nT/r; ua(i,j)=0.377*r*n(i)/(ig(j)*i0); Fz(i,j)=CdA*ua(i,j)^2/21.15+mz*g*f;
汽车模型的设计及数控加工
2012届本科毕业论文(设计)论文题目:汽车模型的设计及数控加工 学生姓名: 所在院系:机电学院 所学专业:机械设计制造及其自动化 导师姓名: 完成时间:2012年5月18日
摘要 数控机床是典型的机电相融合的机电一体化产品,CAD/CAM是计算机科学同机械工程交叉的结果。本课题主要是对汽车模型进行设计并用数控机床加工,在设计和加工过程中,用Solid Works进行造型设计, CAXA制造工程师来生成加工轨迹路线和加工代码,然后采用数控机床进行各个零件的加工,最终完成模型组装。 关键词:数控机床,造型设计,Solid Works ,CAXA制造工程师,数控加工 Abstract CNC machine tool is typical of combining electromechanical integration of the mechanical and electronic products,CAD/CAM is computer science with mechanical engineering cross results. This topic is mainly to the car model design and CNC machine tool processing, in the design and processing process, with Solid Works on model design, CAXA manufacturing engineers to generate processing track route and processing code, then the CNC machine tools for various pats processing ,finally complete assembly model. Keywords:CNC Machine Tool , Model Design ,Solid Works ,CAXA Manufacturing Engineers ,CNC Machining
制作简单汽车模型教学设计实施方案
目录 一、教学设计 课程名称汽车机械基础教学时间90课时 学习单元制作简单汽车模型教学时间45课时 学习目标(细化) 1、学生通过与顾客沟通,掌握与顾客沟通地技巧; 2、学生根据顾客地描述,确认顾客委托任务; 3、学生通过查找资料收集相关信息,制定出制作简单汽车模型地工作计划; 4、学生能够初步掌握常用工具、量具地操作方法与技能以及维护保养知识; 5、能正确解释汽车常用金属材料牌号地意义,知道汽车常用材料机械性能和适宜采用地工艺方法;能解释汽车零件地材料性能、牌号及加 工地方法. 1 / 21
6、学生能够掌握识读汽车基本地零件图和简单装配图、各种结构、工作示意图,对图地理解正确,并能说明结构、工作示意图所表达地意 思. 7、学生能够掌握钳工基础知识,钳工工艺加工地编程;钳工工艺基础理论知识; 8、合理选择和正确使用改锥及各类扳手等常用通用工具; 合理选择和正确使用外径千分尺、游标卡尺、百分表等通用量具,测量结果准确. 9、让学生在实践中培养安全和维护质量意识,并且认真履行工作安全和环境保护地规定; 10、学生对工作结果进行记录并对结果加以分析总结; 11、学生要对实习设备工具、车辆、仪器、环境、人身安全认真负责; 12、通过小组学习培养团队协作意识; 13、与顾客,上级和同事进行沟通并对工作情况进行说明; 14、提升环保和节约意识,对可重复利用材料合理使用; 15、严格遵守用电安全、生产条例,规范操作 工作任务工作过程导向教学突破点教学设备设施要求 情境模拟:机修工人从销售商处接受制作金属汽车模型地任务,加工后成品收购进行销售. 零件加工尺寸、加工余量 金属零件钳工加工 汽车维修钳工基本工具: 划线:划针、划线盘、高度游标卡尺、划规、 2 / 21
基于Matlab的车牌识别(完整版)
基于Matlab的车牌识别 摘要:车牌识别技术是智能交通系统的重要组成部分,在近年来得到了很大的发展。本文从预处理、边缘检测、车牌定位、字符分割、字符识别五个方面,具体介绍了车牌自动识别的原理。并用MATLAB软件编程来实现每一个部分,最后识别出汽车车牌。 一、设计原理 车辆车牌识别系统的基本工作原理为:将摄像头拍摄到的包含车辆车牌的图像通过视频卡输入到计算机中进行预处理,再由检索模块对车牌进行搜索、检测、定位,并分割出包含车牌字符的矩形区域,然后对车牌字符进行二值化并将其分割为单个字符,然后输入JPEG或BMP格式的数字,输出则为车牌号码的数字。车牌自动识别是一项利用车辆的动态视频或静态图像进行车牌号码、车牌颜色自动识别的模式识别技术。其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。某些车牌识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。一个完整的车牌识别系统应包括车辆检测、图像采集、车牌识别等几部分。当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。车牌识别单元对图像进行处理,定位出车牌位置,再将车牌中的字符分割出来进行识别,然后组成车牌号码输出。 二、设计步骤 总体步骤为: 车辆→图像采集→图像预处理→车牌定位
→字符分割→字符定位→输出结果 基本的步骤: a.车牌定位,定位图片中的车牌位置; b.车牌字符分割,把车牌中的字符分割出来; c.车牌字符识别,把分割好的字符进行识别,最终组成车牌号码。 车牌识别过程中,车牌颜色的识别依据算法不同,可能在上述不同步骤实现,通常与车牌识别互相配合、互相验证。 (1)车牌定位: 自然环境下,汽车图像背景复杂、光照不均匀,如何在自然背景中准确地确定车牌区域是整个识别过程的关键。首先对采集到的视频图像进行大范围相关搜索,找到符合汽车车牌特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为车牌区域,并将其从图象中分割出来。 流程图: (2)车牌字符分割 : 完成车牌区域的定位后,再将车牌区域分割成单个字符,然后进行识别。字符分割一般采用垂直投影法。由于字符在垂直方向上的投影必然在字符间或字符内的间隙处取得局部最小值的附近,并且这个位置应满足车牌的字符书写格式、字符、尺寸限制和一些其他条件。利用垂直投影法对复杂环境下的汽车图像中的字符分割有较好的效果。 导入原始图像 图像预处理增强效果图像 边缘提取 车牌定位 对图像开闭运算
制作车辆模型
制作车辆模型 【教学内容】五年级下册《研究与实践》专题一:制作车辆模型 【教学目标】 1、通过指导学生组装玩具车,培养学生的看图、空间想象、动手操作、小组合作、表达交流的能力。 2、培养学生之间的协作能力和尊重他人劳动成果的品质,在活动中体验成功的快乐,并从组装活动的交流中获得情感体验。 3、通过组装车模活动,培养学生爱科学、学科学、用科学的积极性;培养他们的科学意识和科学素质。 【教学重难点】 教学重点:动手制作自己喜爱的车辆模型。 教学难点:通过交流进一步了解各种车辆的形状、结构及其模型制作,激发学生的创新意识。 【教具、学具】 1、教师准备:学生实验的一些车辆模型、模具成品及有关零部件,多媒体课件及相关视频资料(有关车辆构造、主要部件名称、组装方法步骤等)。 2、学生准备: (1)课前收集有关车辆模型及制作资料。 (2)双面胶,白乳胶,厚纸板,剪刀,小刀,直尺,金属或塑料细棒,细铁丝,小磨具及一些圆形的小轮等等。 【教学过程】 一、创设情境,激趣引入 1、同学们,今天老师给大家带来了一段视频(当今市面学生能够见到的有关车辆的形状、组装、性能展示等视频资料),想不想看?(播放视频) 2、视频记录了哪些景象?它们为什么能在地面快速地行驶? (让学生交流自己搜集的有关各种车辆资料,并初步了解车辆的结构,为制作车辆模型作好铺垫。完成教科书第74页内容) 3、(播放汽车在我国的发展历程及的简单构造等视频资料)同学们,汽车是我国陆地运输比较重要交通工具之一,我国汽车工业发展迅猛,车辆款式创新、
质量快速提高以及价格合理性,给我国人民的生产与生活带来了极大的方便。我们作为未来的国家主人,要尽早了解有关车辆的一些知识与技能。这节课我们就来学习制作你喜爱的小汽车。(板书课题:制作车辆模型) 二、小组探究,制定方案 教师:同学们,想不想自己制作一个小汽车?(齐答:想)好啊!那就请大家把准备制作车辆的材料展示出来,让老师和同学们互相看一看吧!(学生展示自己准备的材料) 1、材料准备 (1)领取或准备制作车辆模型的零部件。 (2)检查说明书与所领零部件是否一致。 (3)对照说明书看看所领零部件是否齐全。 2、小组内制定方案 (1)教师:以小组为单位,把你们认为最好的制作方案选出来,在全班进行交流。 (2)学生小组内交流,相互提合理建议,确定最佳方案。 (3)完成教科书第75页内容。 (4)班级交流。各小组汇报最佳制作方案。(小组代表发言) (5)同学们,你们觉得在制作车辆模型时,应该注意什么? (6)小组活动,汇报交流。 仔细阅读说明书,按照说明书指导的步骤一丝不苟地组装;②注意安全,不能损坏零部件;③小组合作。 (7)教师:好啊!大家说出了制作车辆模型的注意事项:首先要仔细阅读说明书,按照说明书指导的认真细心地组装;其次要注意安全,不要损坏了车辆的零部件;还要注意小组内的相互配合,齐心协力。 三、小组合作,实施方案 1、教师出示已组装的车辆模型,引导学生仔细观察。 2、学生小组合作,按自己确立的研究方案,开始组装。教师巡视指导。 (1)指导学生阅读说明书 ①教师:现在的车模套材都附有一份图文并茂的说明书,在组装车模之前,请同学们要仔细阅读说明书。说明书不但介绍了零件的编号、安装的步骤,还给出了一些重要的提升和说明,你们能学到许多有关车模组装、调整方面的技
汽车理论课后题matlab程序
1.3 n=600:1:4000; r=0.367; i0=5.83; eff=0.85; f=0.013; m=3880; g=9.8; G=m*g; CdA=2.77; a=1.947; hg=0.9; L=3.2; Iw1=1.798; Iw2=3.598; Iw=Iw1+Iw2; If=0.218; Ttq=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000) .^4; %驱动力行驶阻力平衡图 for ig=[5.56,2.769,1.644,1.00,0.793] Ua=0.377*r*n/ig/i0; Ft=Ttq*ig*i0*eff/r; plot(Ua,Ft); hold on; end Ff=G*f; ua=0:0.1:max(Ua); Fw=CdA*ua.^2/21.15; plot(ua,(Ff+Fw)); title('驱动力-行驶阻力平衡图'); xlabel('Ua/(km/h)');ylabel('Ft/N'); gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw') [x,y]=ginput(1); disp('汽车的最高车速');disp(x);disp('km/h'); %最大爬坡度及最大爬坡度时的附着率 Ua=0.377*r*n/5.56/i0; Ft=Ttq*5.56*i0*eff/r; Fw=CdA*Ua.^2/21.15; i=tan(asin((Ft-(Ff+Fw))/G)); disp('汽车的最大爬坡度');disp(max(i)); C=max(i)/(a/L+hg/L*max(i)); disp('克服最大爬坡度时的附着率');disp(C); %加速度倒数曲线 figure; for ig=[5.56,2.769,1.644,1.00,0.793] Ua=0.377*r*n/ig/i0; q=1+Iw/(m*r^2)+If*ig^2*i0^2*eff/(m*r^2); Ft=Ttq*ig*i0*eff/r; Fw=CdA*Ua.^2/21.15; as=(Ft-(Ff+Fw))/q/m; plot(Ua,1./as); hold on; end axis([0 98 0 10]); title('行驶加速度倒数曲线');xlabel('Ua/(km/h)');ylabel('1/a'); gtext('1/a1'),gtext('1/a2'),gtext('1/a3'),gtext('1/a4'),gtext('1/a5'); %加速时间曲线
基于MATLAB的汽车制动系统设计与分析软件开发.
基于MAT LAB 的汽车制动系统 3 设计与分析软件开发 孙益民(上汽汽车工程研究院 【摘要】根据整车制动系统开发需要, 利用MAT LAB 平台开发了汽车制动系统的设计和性能仿真软件。 该软件用户界面和模块化设计方法可有效缩短开发时间, 提高设计效率。并以上汽赛宝车为例, 对该软件的可行性进行了验证。 【主题词】制动系汽车设计 统分成两个小闭环系统, 使设计人员更加容易把 1引言 制动性能是衡量汽车主动安全性的主要指标。如何在较短的开发周期内设计性能良好的制动系统一直是各汽车公司争相解决的课题。 本文拟根据公司产品开发工作需要, 利用现有MA T LAB 软件平台, 建立一套面向设计工程师, 易于调试的制动开发系统, 实现良好的人机互动, 以提高设计效率、缩短产品开发周期。 握各参数对整体性能的影响, 使调试更具针对性。 其具体实施过程如图1所示。 3软件开发
与图1所示的制动系统方案设计流程对应, 软件开发也按照整车参数输入、预演及主要参数确定, 其他参数确定和生成方案报告4个步骤实现。3. 1车辆参数输入 根据整车产品的定位、配置及总布置方案得出空载和满载两种条件下的整车质量、前后轴荷分配、质心高度, 轮胎规格及额定最高车速。以便获取理想的前后轴制动力分配及应急制动所需面临的极限工况。 3. 2预演及主要参数确定 在获取车辆参数后, 设计人员需根据整车参数进行制动系的设计, 软件利用MAT LAB 的G U I 工具箱建立如图2所示调试界面。左侧为各主要参数, 右侧为4组制动效能仿真曲线, 从曲线可以查看给定主要参数下的制动力分配、同步附着系数、管路压力分配、路面附着系数利用率随路况的变化曲线, 及利用附着系数与国标和法规的符合现制动器选型、性能尺寸调节, 查看液压比例阀、感载比例阀、射线阀等多种调压工况的制动效能, 并通过观察了 2汽车制动系统方案设计流程的优化 从整车开发角度, 制动系统的开发流程主要包括系统方案设计、产品开发和试验验证三大环节。制动系统的方案设计主要包含结构选型、参数选择、性能仿真与评估, 方案确定4个环节。以前, 制动系统设计软件都是在完成整个流程后, 根据仿真结果对初始设计参数修正。因此, 设计人员往往要反复多次方可获得良好的设计效果, 而且, 在调试过程中, 一些参数在特定情况下的相互影响不易在调试中发现, 调试的尺度很难把握。 本文将整车设计流程划分为两个阶段:主要参数的预演和确定、其他参数的预演和参数确定。即根据模块化设计思想, 将原来一个闭环设计系 收稿日期:2004-12-27 3本文为上海市汽车工程学会2004年(第11届学术年会优秀论文。
汽车销售管理系统概念模型设计
电子科技大学 标准实验报告(实验)课程名称数据库原理综合实验 电子科技大学教务处制表
电子科技大学 实验报告 学生姓名: 学号: 指导教师: 实验地点: 实验时间:2017年5月2日 一、实验室名称: 二、实验项目名称:汽车销售管理系统概念模型设计 三、实验学时:4 四、实验原理: 概念结构是对现实世界的一种抽象(常用抽象有:分类、聚类、概括),从实际的人、物、事和概念中抽取所关心的共同特性,忽略非本质的细节,把这些特性用各种概念精确地加以描述,这些概念组成了某种模型。通常用E-R图描述实体、属性、实体之间的关系。将不能再具有描述性质以及不与其他实体有联系的事物作为属性对待,常用的属性有单个属性和组合属性,单值属性和多值属性以及派生属性。 将不同实体型的实体集之间的联系称为联系把参与联系的实体型的数目称为联系的度,常用的联系有1对1、1对多、多对多。 在开发一个大型信息系统时,最经常采用的策略是自顶向下地进行
需求分析,然后再自底向上地设计概念结构。即首先设计各子系统的分E-R图,然后通过合并、修改与重构将它们集成起来,得到全局E-R图。在各子系统进行合并时将涉及到E-R图之间的冲突,主要有三种类型的冲突:属性冲突:属性域冲突、属性取值单位冲突;命名冲突:同名异义、异名同义;结构冲突:同一对象在不同应用中具有不同的抽象、同一实体在不同子系统的E-R图中所包含的属性个数和属性排列次序不完全相同、实体间的联系在不同的E-R图中为不同的类型。修改与重构主要是为了消除冗余的数据以及实体间联系的冗余。 五、实验目的: 熟练掌握局部E-R图和全局E-R图的建立方法,熟练掌握概念模型向数据模型(关系模式)的转化 六、实验内容: 根据所选题目汽车销售管理系统需求分析内容,进行局部概念模型分析与设计,然后进行全局概念模型设计。 七、实验器材(设备、元器件):计算机、Microsoft Visio2013软件 八、实验步骤: 1、对需求分析阶段收集到的数据进行分类、组织,确定实体、实体的属性、实体之间的联系类型,形成E-R图。 2、合并E-R图,生成初步E-R图。 3、消除不必要的冗余,设计基本E-R图。
MATLAB在“汽车理论”中的简单应用
MATLAB在 汽车理论 中的简单应用 汽车理论 可以使用MATLAB作为科学计算工具的课程三本文档的目的在于向之前没有接触过MATLAB的同学介绍其在 汽车理论 中的简单应用,更多关于MATLAB的知识需要大家结合其他课程,通过进一步的学习和研究来掌握三 需要说明的是: 1)本文档默认读者已掌握C语言和线性代数基本知识三 2)红色字体的语句可以直接复制到MATLAB中进行运算三语句中用到的符号(引号内部分除外)均为英文状态下输入三本文档所有语句均已在MATLAB7.8.0(R2009a)版本下调试过三 3)例程编写样式纯属个人习惯,大家不必拘泥三 4)如对本文档及‘汽车理论“第6版中的附录C一一个学生的 汽车理论 课程MATLAB习题编程思路有任何问题,欢迎发送邮件一起讨论三邮件地址:wang-d07@ https://www.wendangku.net/doc/d21933478.html,三 1.MATLAB使用指南 打开MATLAB后出现的是软件的主界面三几个窗口中最重要的是Command Window,用户可以在里面输入程序,编写的函数的结果也在这里显示三 首先对MATLAB进行配置三如果是在自己的计算机上编程,建议先建一个属于自己的workspace,用来保留用户的工作环境三选择 file Save Workspace As ,在合适的目录下保存用户自己的workspace(.mat文件)三这样,以后用户编程的环境就默认为这个workspace了三 虽然可以直接在Command Window里编写程序,但这样的程序无法被保存和发布三选择 file New Blank M File ,可以新建空白的MATLAB函数文件(.m文件),在这里编写的程序可以被保存和发布三编写好的程序要经过编译之后才能执行三选择 Tools Save File and Run (也可以直接按
基于MATLAB的汽车道路模型研究毕业设计论文
武汉工业学院 毕业设计(论文) 毕业设计(论文)题目:基于MATLAB的汽车道路模型研究 院(系)机械工程学院 专业名称机械设计制造及其自动化
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
- 汽车理论课后题matlab程序
- 汽车理论课后习题Matlab程序
- 汽车理论1-4MATLAB编程
- 汽车理论课后习题Matlab程序
- 《汽车理论》第五版1.3题Matlabcode
- MATLAB在“汽车理论”中的简单应用
- 汽车理论matlab
- 汽车理论matlab作业
- 汽车理论matlab作业
- 汽车理论图形MATLAB程序
- 汽车理论习题Matlab程序
- 汽车理论课后习题MATLAB编程
- 最新汽车理论1.3和2.7matlab编程答案
- 汽车理论1-4MATLAB编程
- 汽车理论课后习题Matlab程序-2
- 汽车理论课后习题Matlab程序
- 汽车理论课后题matlab程序
- (完整版)汽车理论习题Matlab程序
- 汽车理论课后作业 答案 MATLAB
- 汽车理论课后习题Matlab程序