Robotiq-2-Finger-Adaptive-Gripper-Specifications
ROBOTIQ ADAPTIVE GRIPPER
3 GRIPPING
MODES
POWERFUL CONTROL
Parallel, encompassing and internal grip.Control of fingers’ position, speed and force. Grip detection.
PICK, PLACE AND ASSEMBLE
INTERFACE
GRIP IT ALL.
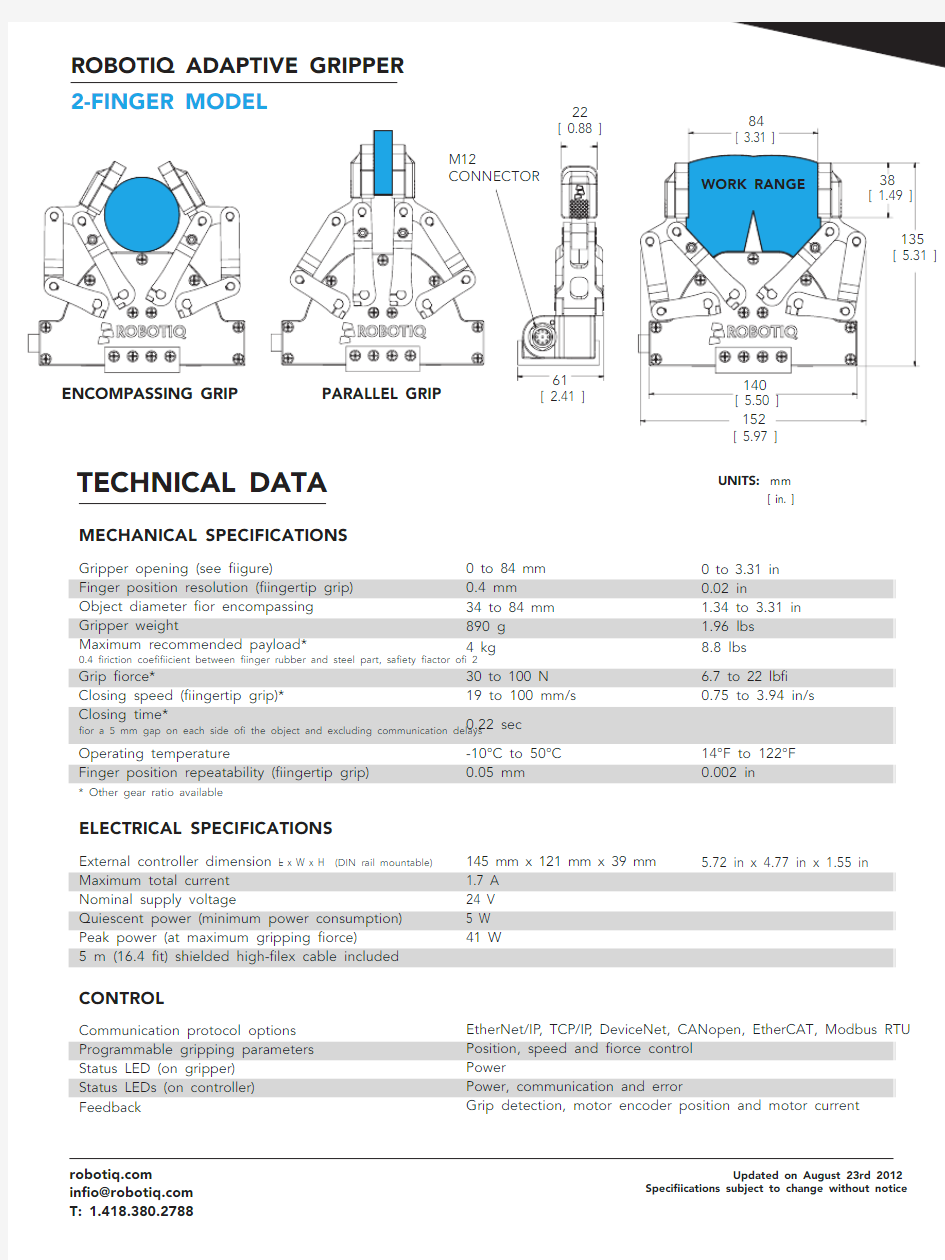
Gripper opening (see figure)
Finger position resolution (fingertip grip)Object diameter for encompassing Gripper weight
Maximum recommended payload*
0 to 84 mm 0.4 mm
34 to 84 mm 890 g
0 to 3.31 in 0.02 in
1.34 to 3.31 in 1.96 lbs
Communication protocol options Programmable gripping parameters Status LED (on gripper)Status LEDs (on controller)Feedback
EtherNet/IP , TCP/IP , DeviceNet, CANopen, EtherCAT, Modbus RTU Position, speed and force control Power
Power, communication and error
Grip detection, motor encoder position and motor current
External controller dimension - L x W x H Maximum total current Nominal supply voltage
Quiescent power (minimum power consumption)Peak power (at maximum gripping force)
5 m (16.4 ft) shielded high-flex cable included
145 mm x 121 mm x 39 mm 1.7 A 24 V 5 W 41 W
5.72 in x 4.77 in x 1.55 in
MECHANICAL SPECIFICATIONS
CONTROL
ELECTRICAL SPECIFICATIONS
TECHNICAL DATA
0.4 friction coefficient between finger rubber and steel part, safety factor of 2
for a 5 mm gap on each side of the object and excluding communication delays
(DIN rail mountable) 4 kg
8.8 lbs
ENCOMPASSING GRIP PARALLEL GRIP
22
[ 2.41 ]
Updated on August 23rd 2012
Specifications subject to change without notice
ROBOTIQ ADAPTIVE GRIPPER 2-FINGER MODEL
T: 1.418.380.2788info@https://www.wendangku.net/doc/ef5232631.html, https://www.wendangku.net/doc/ef5232631.html,
Grip force*
Closing speed (fingertip grip)*Closing time*
Operating temperature
Finger position repeatability (fingertip grip)
* Other gear ratio available
30 to 100 N 19 to 100 mm/s -10°C to 50°C 0.05 mm 6.7 to 22 lbf 0.75 to 3.94 in/s
14°F to 122°F 0.002 in 0.22 sec [ in. ]
mm
UNITS: