哈工大机电系统控制第三章答案_

3-1 题图3-1所示的阻容网络中,i ()[1()1(30)](V)u t t t =--。当t =4s 时,输出o ()
u t 值为多
少?当t 为30s 时,输出u o (t )又约为多少?
解:661(s)111
1(s)1110410141o i U sC
U RCs s R sC -====+???+++
(4)0.632(V)o u ≈,(30)1(V)o u ≈
3-2 某系统传递函数为21
()56
s s s s +Φ=
++,试求其单位脉冲响应函数。
解:
2(s)112
(s)5623o i X s X s s s s +-==+++++ 其单位脉冲响应函数为
23(t)(e 2e )1()
t t x t δ--=-+?
3-3 某网络如图3-3所示,当t ≤0-时,开关与触点1接触;当t ≥0+时,开关与触点2接触。
试求输出响应表达式,并画出输出响应曲线。
1V
题图3-1 题图3-3
解:
1(s)1
1(s)2121()o i R U RCs s sC
U RCs s R R sC
+
+===++++
01(t)1(2)1()(V)i i i u u u t =+=+-?
1111212
(s)(s)121212
o i s s U U s s s s
s ++-=
==-+++ 则
2
1(t)(e 2)1()(V)
t o u t -
=-?
12
01(t)1(e 2)1()(V)
o o o u u u t -=+=+-?
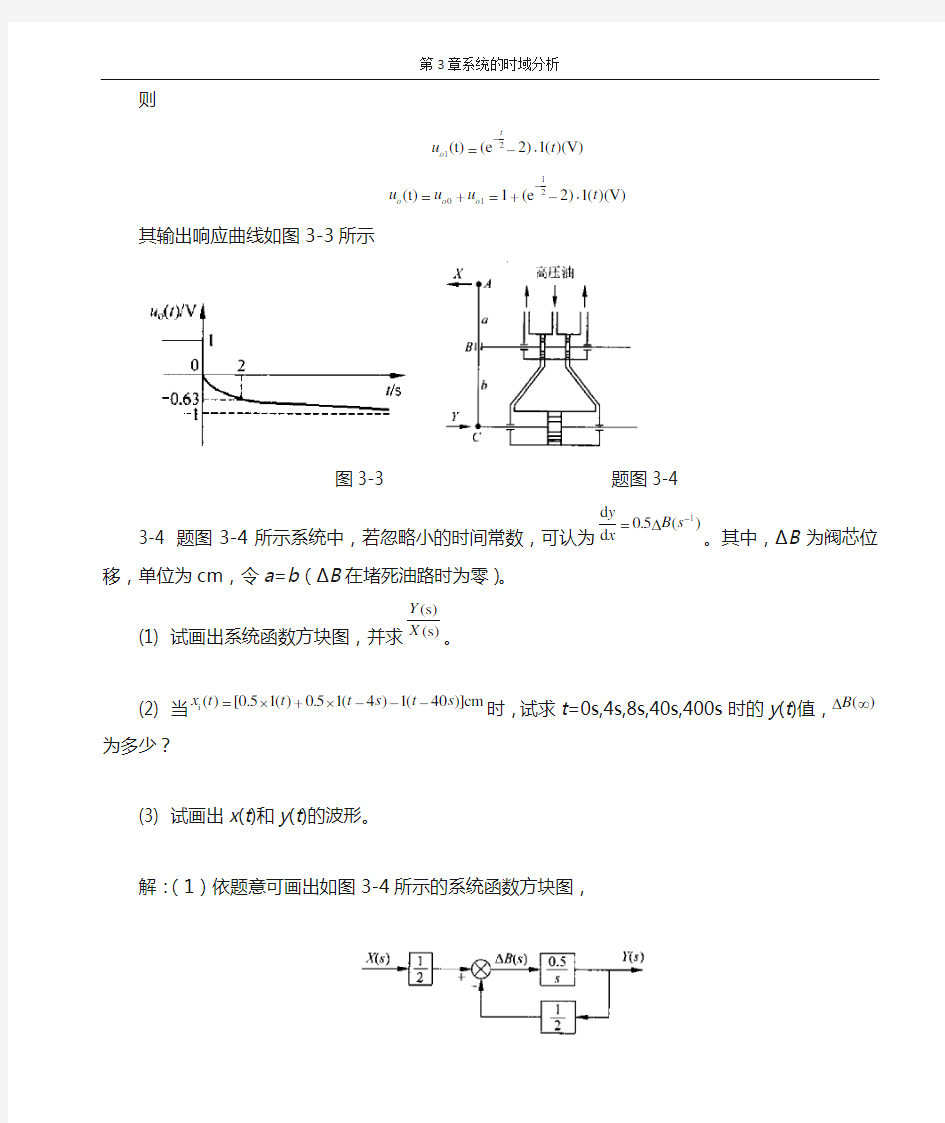
其输出响应曲线如图3-3所示
图3-3 题图3-4
3-4 题图3-4所示系统中,若忽略小的时间常数,可认为
1d 0.5()d y
B s x
-=?。其中,ΔB 为阀芯位移,单位为cm ,令a =b (ΔB 在堵死油路时为零)。
(1) 试画出系统函数方块图,并求(s)(s)
Y X 。
(2) 当i ()[0.51()0.51(4)1(40)]cm x t t t s t s =?+?---时,试求t =0s,4s,8s,40s,400s 时的y (t )值,()B ?∞为多少? (3) 试画出x (t )和y (t )的波形。
解:(1)依题意可画出如图3-4所示的系统函数方块图,
图3-4-1
则
10.5(s)1210.5X(s)41
12Y s s s
?
=
=++? (2)该一阶惯性环节的时间常数为 4(s)T =
当(t)[0.51()0.51(4)1(40)](cm)x t t t =?+?---时,
(0)0(cm)y =
(4)0.50.6320.316(cm)y ≈?=
(8)0.50.8660.50.6320.749(cm)y ≈?+?= (40)1(cm)y ≈ (400)0(cm)y ≈
()0(cm)B ?∞=
(3)x(t)和y(t)的波形如图3-4-2(a)、(b)所示。
图3-4-2
3-5 设单位反馈系统的开环传递函数为4
()(s 5)
G s s =
+,试求该系统的单位阶跃响应和单位
脉冲响应。
解:系统闭环传递函数为
24
(s)44(s 5)
4(s)54(s 1)(s 4)
1(s 5)
o i X s X s s s +===++++++ (1)当()1()i x t t =时,1()i X s s
=
41
()411
33()()()(4)(1)14
o o i i X s X s X s X s s s s s s s ===-+++++
则
441
()1()1()1()33
t t o x t t e t e t --=-?+?
(2)当()()i x t t δ=时,()1i X s =
44
(s)4
33(s)(s)1(s)(s 4)(s 1)14
o o i i X X X X s s ==?=-++++
则
44()()1()3
t
t o x t e e t --=
-? 3-6 设单位反馈系统的开环传递函数为1
()(s 1)
G s s =
+,试求系统的上升时间、峰值时间、最大超调量和调整时间。当()(s 1)
K
G s s =+时,试分析放大倍数K 对单位阶跃输入产生的输出动态过程特性的影响。
解:(1)222
1
(s)1(s 1)
1(s)20.5111(s 1)
o i X s X s s s +==+??+++ 得
1(rad/s)n ω=
则
0.5ζ=
s)d ωω===
arccos arccos0.5(rad)3
π
θζ===
所以
2.418(s)r t π
π-
=
≈
3.628(s)
r d t πω=
=≈
16.3%
p M e
e
==≈
3
3
6(s)10.5
r n t ωζ
≈
=
=?(进入5%误差带) (2
)22
(s)(s 1)
(s)12(s 1)o i K
X s K X s s +==++++ 得
s)n ω=
则
ζ=
s)2d ωω===
arccos θζ==
则(Ⅰ)当1ζ=
=时,即1
4K =时,系统为临界阻尼,系统不产生振荡。
(Ⅱ)当1ζ=
>时,即1
4K <时,系统为过阻尼,系统不产生振荡。
(Ⅲ)当0ζ=
=时,即K =∞时,系统为零阻尼,系统产生振荡。 (Ⅳ)当01ζ<<,即
1
4
K <<∞时,系统为欠阻尼,此时
r d
t πθ
ω-=
= K 增大时,r t 减小。
2
p d
t πω=
=
K 增大时,p t 减小。
p M e
e
e
===K 增大时,p M 也增大。
336(s)1s n t ωζ
=
=
=
当K 较大时,s t 基本不受K 变化的影响。 3-7 已知一系统由下述微分方程描述:
10x y dt
dy
2dt y d 2<<=++ξξ, 当x (t )=1(t )时,试求最大超调量。 解:将微分方程两边取拉氏变换得
2(s)2sY(s)Y(s)X(s)s Y ζ++=
则
2(s)1
(s)21
Y X s s ζ=++,01ζ<<
max ()|()
()
p y t y M e
y -∞==∞
3-8 设有一系统的传递函数为222()2n
n n
ωG s s ξωs ω=++,为使系统对阶跃响应有5%的超调量和2 s 的调整时间,试求ζ和n ω。
解:5
1003
2n
e ζω??=???=?? 解之,得
0.69ζ≈, 2.2(rad/s)n ω=
3-9 证明对于题图3-9所示系统,o i (s)(s)
X X 在右半s 平面上有零点,当x i (t )为单位阶跃时,求
y (t )。
解:(s)642(s 1)
(s)21(s 1)(2)
Y X s s s -=-=++++
由上式可见,s=1是系统在右半s 平面的零点。当(t)1(t)x =时
2(s 1)1431(s)(s 1)(s 2)12Y s s s s
-=
=--
++++
则
2(t)(4e 3e 1)1(t)
t t y --=--?
3-10 设一单位反馈系统的开环传递函数为10
()(s 1)
G s s =
+,该系统的阻尼比为0.157,无阻尼自振角频率为3.16 rad/s ,现将系统改变为如题图3-10所示,使阻尼比为0.5。试确定n K 值。
题图3-9 题图3-10
解:
10
(s)(s 1)
10(1K s)(s)1(s 1)
o n i X s X s +=++
+
22
2
210
(110K )s 10
3.16(110K )s 3.16n n s s =
+++=+++
依题意,有110220.5 3.16 3.16n n K ζω+==??= 解之,得0.216n K =,即为所求。
3-11 二阶系统在s 平面中有一对复数共轭极点,试在s 平面中画出与下列指标相应的极点
可能分布的区域:
(1) n 0.7072rad /s ξω≥>,; (2) n 00.7072rad /s ξω≤≤≤,; (3) 00.5ξ≤≤,n 2rad /s 4rad /s ω≤≤;
(4) n 00.7072rad /s ξω≤≤≤,
。 解:(1)所求区域为图3-11(a)中阴影部分。
(2)所求区域为图3-11(b)中阴影部分。 (3)所求区域为图3-11(c)中阴影部分。
(4)所求区域为图3-11(d)中阴影部分。
(a) (b)
(c) (d)
图3-11
3-12 设一系统如题图3-12(a)所示。
(1) 当控制器c ()1G s =时,求单位阶跃输入时系统的响应。设初始条件为零,讨论L 和
J 对响应的影响。
(2) 设c d ()1s G s T =+,J =1000,为使系统为临界阻尼,求d T 值。
(3) 现在要求得到一个没有过调的响应,输入函数形式如题图3-12(b)所示。设c ()1G s =,
L 和J 参数同前,求K 和t 1。
(a)
x o (t x i (t 10
(b) 题图3-12
解:(1)222(s)(s)1o i L L X Js J L L X s Js J
==++
则
211(s)o L J
X L
s s s J =
=-+
对上式进行拉氏反变换,得
(t)1(t)1(t)o X =-?
由此可知,其单位阶跃响应为等幅振荡,当L 增大、J 减小时,角频率ω增大。 (2
)22
(1T s)
(s)(s)1(1T s)d o i d L
X Js L X Js +==
++
为使系统为临界阻尼,需使1ζ=,即
20
d T === 由(1)知
(s)(s)o i X X =
当
(t)1(t)i x =时
(t)(11(t)
o x =-?
所以
110t π
=
=
== 另有
1(1)(1)[1)]1K K t t -+---= 当110t t π==,10L =,1000J =代入上式,得
[(110)](1)[10]1
K πK -+--= 解之,得
0.5K =
3-13 题图3-13所示为宇宙飞船姿态控制系统方块图。假设系统中控制器时间常数T =3 s ,
力矩与惯量比为
22
rad /9
K s J =。试求系统阻尼比。
题图3-13
解:22
1(1)
(s)1
(s)
1(1)o i K Ts X Js X K Ts Js
+=++
(1)K
Ts +=则
0.7072
ζ=
==≈ 3-14 设一伺服电动机的传递函数为()()1
s K U s Ts Ω=+。假定电动机以0ω的恒定速度转动,当电动机的控制电压u o 突然降到0时,试求其速度响应方程式。 解:电动机的控制电压如图3-14所示
图3-14
22()()111o o o U KU KU K K s U s Ts Ts s s s T
-Ω=
==-
+++
则
2()(1)1()t T
o t KU e
t ω-
=-?
又有
10()o t KU ωω==
所以
120()()()1()t
T
t t t e t ωωωω-
=+=?
3-15 对于题图3-15所示的系统,如果将阶跃输入i θ作用于该系统,试确定表述角度位置0
θ的方程式。假定该系统为欠阻尼系统,初始状态静止。
i
o
题图3-15
解:依题意,有
[()()]()()o o i o K t t D t J t θθθθ?
??
--=
得
2()()o i t K
t Js Ds K
θθ==++
则
n ω=
ζ= 所以,当()1()i t a t θ=?时
()[1arccos )]1()n t o t a t ζωθωζ-=-
+?
2[1s a )]1()
D
t J
a t t -
=-
+
? 3-16 某系统如题图3-16所示,试求单位阶跃响应的最大超调量M p 、上升时间t r 和调整时
间t s 。
题图3-16
解:22
29
(s)3(3)
9(s)20.5331(3)
o i X s s X s s s s +==+??++
+ 则
0.5ζ=
3(rad/s)n ω=
所以
16.3%
p M e e ==≈
0.806(s)r t =
=
=
3
3
2(s)
0.53
s n t ζω===? 3-17 单位反馈系统的开环传递函数为K
()(Ts 1)
G s s =
+。其中,K >0,T >0。问放大器增益减
少多少方能使系统单位阶跃响应的最大超调由75%降到25%?
解:(s)(1)(s)1(1)o i K X s Ts K X s Ts +==++ 则
ζ=
所以
p M e
e
e
===即
2
21(ln )4p M K T
π+=
令
175%p M =,225%p M =
则
2
211(ln 0.75)4K T
π+=
2
221(ln 0.25)4K T
π+=
所以
22
1
2
2
1(ln 0.75)19.61(ln 0.25)K K ππ
+==+
3-18 单位阶跃输入情况下测得某伺服机构的响应为-10t -60t o e 2.1-e 2.01)(x +=t 。试求:
(1) 系统的闭环传递函数;
(2) 系统的无阻尼自振角频率及阻尼比。
解:(1)6010()(10.2 1.2)1()t t o x t e e t --=+-? 则
10.2 1.2600
()6010(60)(10)
o X s s s s s s s =+-=++++
又已知
()1()i x t t =
则
1
()i X s s
=
所以
(s)6001600
/(s)(60)(10)(60)(10)
o i X X s s s s s s ==
++++
(2
)2
(s)600
(s)(60)(10)
o i X X s s =
=++
所以
/s)n ω=
ζ=
3-19 某单位反馈系统的开环传递函数为K
()(s 10)
G s s =
+,阻尼比为0.5时,求K 值,并求
单位阶跃输入时该系统的调整时间、最大超调量和峰值时间。
解:22
(s)(10)
(s)1(10)o i K
X s s K X s s s +==++++
由
0.5ζ=
= 得
100K =
则
10(rad /s)n ω==
3
3
0.6(s)0.510
s n
t ζω≈
=
=?
16.3%p M e e
==≈
0.363(s)p t =
=
=
3-20 试比较题图3-20所示两个系统的单位阶跃响应。
题图3-20
解:对于图(a )所示系统
12(1)
(s)(1)
(1)(s)(1)1(1)
h o h h i h K K s X KK s K s Ts K K s X Ts KK s K
s Ts +++==++++++ 12(s)(s)(1)h o i h KK s K
X X Ts KK s K
+=
+++
22
(s)(s)(1)(1)h i i h h KK K
sX X Ts KK s K Ts KK s K
=
+++++++ 对于图(b )所示系统
22
(s)(1)
(1)(s)(1)1(1)
o h i h K X K s Ts K K s X Ts KK s K s Ts +==++++++
22(s)(s)(1)o i h K
X X Ts KK s K
=
+++
可见,两系统的单位阶跃响应是不同的,图(a )所示系统的响应相当于在图(b )所
示系统的单位阶跃响应上再叠加对于闭环传递函数为2(1)h
h KK Ts KK s K
+++系统的一个单位
脉冲响应。
3-21 一电路如题图3-21所示,当输入电压
i 0V,t 0()5V,00.1s
0V,0.1s u t t t
=<?
时,试求的响应函数。
题图3-21
解:()[51()51(0.1)](V)i u t t t =?-?- 则
0.155()i U s e s s
-=
- ()11
()10.11
o i U s U s RCs s ==
++ 0.1()155
()()()()0.11s o o i i U s U s U s e U s s s s
-=
=-+
0.15555()()1010s e s s s s -=---++ 所以
1010(0.1)()(55)1()[55]1(0.1)(V)t t o u t e t e t ---=-?--?-
哈工大机电控制技术 大作业1
《机电控制技术》 课程大作业一 基于MATLAB的直流电机双闭环调速系统的设计与仿真 学院:机电工程学院 专业:机械设计制造及其自动化 班级:1108110 学号:1110811005 姓名:崔晓蒙 2013-06-17
设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定电压48V ; 额定电流4A ; 额定转速n=500r/min ; 电枢回路总电阻R=0.8Ω;(本次选为8Ω) 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* * im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。
1.计算电流和转速反馈系数 电流反馈系数:) (A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm ===α 2.电流环的动态校正过程和设计结果 2.1确定时间常数 由题给电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.010 1 14=== , 按电流环小时间常数的近似处理方法,有 s T T T oi s i 0003.00002.00001.0=+=+=∑ 2.2选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= 2.3选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流超调量由题给为%5≤i σ,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ 2.4检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。 1)近似条件一:s ci T 31≤ ω
(精选)哈工大机电系统控制基础2014秋-习题课第三章答案
第3章习题课答案 3-1 设单位反馈系统的开环传递函数为4 ()(s 5) G s s =+,试求该系统的单位阶跃响应和单位脉冲响应。 解:系统闭环传递函数为 24 (s)44(s 5) 4(s)54(s 1)(s 4) 1(s 5) o i X s X s s s +===++++++ (1)当()1()i x t t =时,1()i X s s = 41 ()411 33()()()(4)(1)14 o o i i X s X s X s X s s s s s s s ===-+++++g 则 441()1()1()1()33 t t o x t t e t e t --=-?+? (2)当()()i x t t δ=时,()1i X s = 44(s)4 33(s)(s)1(s)(s 4)(s 1)14 o o i i X X X X s s ==?=-++++ 则 44()()1()3 t t o x t e e t --= -? 3-2 系统结构图如图3-70所示。已知系统单位阶跃响应的超调量σ%3.16=%,峰值时间1=p t s 。 (1)求系统的开环传递函数)(s G ; (2)求系统的闭环传递函数)(s Φ; (3)根据已知的性能指标σ%、p t 确定系统参数K 及τ; (4)计算等速输入s t t r )(5.1)(?=时系统的稳态误差。 解 (1) )110(10) 1(101)1(10 )(++=++ +=ττs s K s s s s s K s G
(2) 2 2 22210)110(10)(1)()(n n n s s K s s K s G s G s ωξωωτ++=+++=+=Φ (3)由 ?? ???=-===--113.16212ξωπσ?ξπn p o o o o t e 联立解出 ?????===263.063.35.0τωξn 由(2) 18.1363.31022 ===n K ω,得出 318.1=K 。 (4) 63.31263.01018 .1311010)(lim 0=+?=+= =→τK s sG K s v 413.063 .35 .1===v ss K A e 3-3 设图(a )所示系统的单位阶跃响应如图(b )所示。试确定系统参数,1K 2K 和a 。 解 由系统阶跃响应曲线有 ??? ??=-===∞o o o o p t h 3.333)34(1.03)(σ 系统闭环传递函数为 2 2 2 2122 12)(n n n s s K K as s K K s ωξωω++=++=Φ (1) 由 ????? ===-=--o o o o n p e t 3.331.012 12 ξξπσωξπ 联立求解得 ?? ?==28.3333.0n ωξ 由式(1)???====22 21108 2 1n n a K ξωω 另外 3lim 1 )(lim )(21 22100 ==++=? Φ=∞→→K K as s K K s s s h s s 5.21 )(lim )(0 =? Φ=∞→s s s h s
哈工大机械设计大作业V带传动设计完美版
哈工大机械设计大作业V带传动设计完美版
————————————————————————————————作者:————————————————————————————————日期: ?
Harbin Instituteof Technology 机械设计大作业说明书 大作业名称:机械设计大作业 设计题目:V带传动设计 班级: 设计者: 学号: 指导教师: 设计时间: 2014.10.25 哈尔滨工业大学
目录 一、大作业任务书 ........................................................................................................................... 1 二、电动机的选择 ........................................................................................................................... 1 三、确定设计功率d P ..................................................................................................................... 2 四、选择带的型号 ........................................................................................................................... 2 五、确定带轮的基准直径1d d 和2d d ............................................................................................. 2 六、验算带的速度 ........................................................................................................................... 2 七、确定中心距a 和V 带基准长度d L ......................................................................................... 2 八、计算小轮包角 ........................................................................................................................... 3 九、确定V 带根数Z ........................................................................................................................ 3 十、确定初拉力0F ......................................................................................................................... 3 十一、计算作用在轴上的压力 ....................................................................................................... 4 十二、小V 带轮设计 .. (4) 1、带轮材料选择 ............................................................................................................. 4 2、带轮结构形式 . (4) 十二、参考文献 ............................................................................................................................... 6 ?
哈工大_机电系统控制基础实验_实验一
姓名:学号: 课程名称:机电系统控制基础实验 实验序号: 1 实验日期: 实验室名称: 同组人: 实验成绩:总成绩: 教师评语: 教师签字: 年月日
机电系统控制基础原理性仿真实验 一、实验目的 通过仿真实验,掌握在典型激励作用下典型机电控制系统的时间响应特性,分析系统开环增益、系统阻尼、系统刚度、负载、无阻尼自振频率等机电参数对响应、超调量、峰值时间、调整时间、以及稳态跟踪误差的影响;掌握系统开环传递函数的各参数辨识方法,最后,学会使用matlab 软件对机电系统进行仿真,加深理解系统动态响应特性与系统各参数的关系。 二、实验原理 1.一阶系统的单位脉冲响应 惯性环节(一阶系统)单位脉冲响应simulink 实现图,如图2-1 所示 (a)可观测到输出曲线 (b)输入、输出曲线均可观测到 图2-1 惯性环节(一阶系统)单位脉冲响应simulink 实现图 2.一阶系统的单位阶跃响应 一阶系统的单位阶跃响应simulink 实现图如图2-2 所示。 图2-2 一阶系统的单位阶跃响应simulink 实现图 3.二阶系统的单位脉冲响应 二阶系统的单位脉冲响应simulink 实现图,如图2-3 所示。 图2-3 二阶系统的单位脉冲响应simulink 实现图
4.二阶系统的单位阶跃响应 二阶系统的单位阶跃响应实验simulink 实现图如图2-4 所示。 图2-4 二阶系统的单位阶跃响应实验simulink 实现图 三、实验要求 1. 掌握在典型激励作用下典型机电控制系统的时间响应特性。 2. 掌握系统开环传递函数的各参数辨识方法。 3. 使用matlab 软件对机电系统进行仿真 四、实验结果 1. 一阶系统的单位脉冲响应 Simulink 模型图如图4-1 图4-1 一阶系统单位脉冲响应模型图 单位脉冲函数波形图如图4-2 图4-2 单位脉冲函数波形图
哈工大机械设计大作业轴系
HarbinI n s t i tut e o fTech n o logy 机械设计大作业说明书大作业名称:轴系设计 设计题目: 5.1.5 班级:1208105 设计者: 学号: 指导教师: 张锋 设计时间:2014.12.03 哈尔滨工业大学
哈尔滨工业大学 机械设计作业任务书 题目___轴系部件设计____ 设计原始数据: 方案电动机 工作功 率P/k W 电动机满 载转速n m /(r/min) 工作机的 转速n w /(r/min) 第一级 传动比 i1 轴承座 中心高 度 H/mm 最短工 作年限 工作环 境 5.1.5 3 710 80 2 170 3年3 班 室内清 洁 目录 一、选择轴的材料 (1) 二、初算轴径 (1) 三、轴承部件结构设计 (1) 3.1轴向固定方式 (2) 3.2选择滚动轴承类型 (2) 3.3键连接设计 (2) 3.4阶梯轴各部分直径确定 (2) 3.5阶梯轴各部段长度及跨距的确定 (2) 四、轴的受力分析 (3) 4.1画轴的受力简图 (3) 4.2计算支反力 (3) 4.3画弯矩图 (3) 4.4画转矩图 (5) 五、校核轴的弯扭合成强度 (5)
六、轴的安全系数校核计算………………………………………………6 七、键的强度校核 (7) 八、校核轴承寿命 (8) 九、轴上其他零件设计 (9) 十、轴承座结构设计 (9) 十一、轴承端盖(透盖).........................................................9参考文献 (10)
一、选择轴的材料 该传动机所传递的功率属于中小型功率,因此轴所承受的扭矩不大。故选45号钢,并进行调质处理。 二、初算轴径 对于转轴,按扭转强度初算直径 3min m P d C n ≥ 式中: P ————轴传递的功率,KW ; m n ————轴的转速,r/mi n; C————由许用扭转剪应力确定的系数,查各种机械设计教材或机械设计手册。 根据参考文献1表9.4查得C=118~106,取C=118, 所以, mm n P C d 6.23355 85.211833==≥ 本方案中,轴颈上有一个键槽,应将轴径增大5%,即 ????d ≥23.6×(1+5%)=24.675mm 按照GB 2822-2005的a R 20系列圆整,取d=25mm。 根据GB/T1096—2003,键的公称尺寸78?=?h b ,轮毂上键槽的尺寸 b=8m m,mm t 2.0013.3+= 三、轴承部件结构设计 由于本设计中的轴需要安装带轮、齿轮、轴承等不同的零件,并且各处受力不同,因此,设计成阶梯轴形式,共分为七段。以下是轴段的草图: 3.1及轴向固定方式 因传递功率小,齿轮减速器效率高、发热小,估计轴不会长,故轴承部件的固定方式可采用两端固定方式。因此,所涉及的轴承部件的结构型式如图2所示。然后,可按轴上零件的安装顺序,从min d 处开始设计。 3.2选择滚动轴承类型 因轴承所受轴向力很小,选用深沟球轴承,因为齿轮的线速度,齿轮转动时飞溅的润滑油不足于润滑轴承,采用油脂对轴承润滑,由于该减速器的工作环境清 洁,脂润滑,密封处轴颈的线速度较低,故滚动轴承采用毡圈密封,由于是悬臂布置所以不用轴上安置挡油板。 3.3 键连接设计 轴段⑦ 轴段⑥ 轴段⑤ 轴段④ 轴段③ 轴段② 轴段① L1 L2 L3 图1
哈尔滨工业大学机械设计大作业_带传动电算
H a r b i n I n s t i t u t e o f T e c h n o l o g y 上机电算说明书 课程名称:机械设计 电算题目:普通V带传动 院系:机电工程学院 班级: 设计者: 学号: 指导教师: 设计时间:2015.11.11-2015.12.1 哈尔滨工业大学
目录 一、普通V带传动的内容 (1) 二、变量标识符 (1) 三、程序框图 (2) 四、V带设计C程序 (3) 五、程序运行截图 (10) 参考文献 (11)
一、普通V带传动的内容 给定原始数据:传递的功率P,小带轮转速n1 传动比i及工作条件 设计内容:带型号,基准长度Ld,根数Z,传动中心距a,带轮基准直径dd1、dd2,带轮轮缘宽度B,初拉力F0和压轴力Q。 二、变量标识符 为了使程序具有较好的可读性易用性,应采用统一的变量标识符,如表1所示。表1变量标识符表。 表1 变量标识符表
三、程序框图
四、V带设计c程序 #include
哈工大机械设计大作业一千斤顶
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业设计计算说明书 题目:设计螺旋起重器(千斤顶) 系别: 班号: 姓名: 日期:
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业任务书 题目:设计螺旋起重器 设计原始数据:题号3.1.1 起重量Fq=30 kN 最大起重高度H=180mm
一 选择螺杆、螺母的材料 螺杆采用45#调制钢,由参考文献[2]表10.2查得抗拉强度b 600 MPa σ=,s 355 MPa σ=。 螺母材料用铝黄铜ZCuAl10Fe3。 二 耐磨性计算 螺杆选用45# 钢,螺母选用铸造铝黄铜ZCuAl10Fe3,由参考文献[1]表 5.8 查得[]p =18~25MPa 从表 5.8 的注释中可以查得,人力驱动时[]p 值可以加大20%,则[]p =21.6~30MPa 取[]25MPa p = 。 按耐磨性条件设计螺纹中径2d ,选用梯形螺纹,则 2d ≥ 由参考文献[1]查得,对于整体式螺母系数2ψ==1.2—2.5,取2ψ=。 则 式中:Q F -----轴向载荷,N ; 2d -----螺纹中径,mm ; []p -----许用压强,MPa ; 查参考文献[2]表11.5取公称直径28d =mm ,螺距3P =mm ,中径226.5d =mm ,小径 324.5d =mm ,内螺纹大径428.5D =mm 。 三 螺杆强度校核 螺杆危险截面的强度条件为: 219.6d mm ≥==
e []σσ=≤ (2) 式中:Q F -----轴向载荷,N ; 3d -----螺纹小径,mm ; 1T -----螺纹副摩擦力矩,2 1tan(') 2Q d T F ψρ=+ (3) ψ为螺纹升角,ψ ; []σ-----螺杆材料的许用应力,MPa 。 查参考文献[1]表5.10得钢对青铜的当量摩擦因数'0.08~0.10f =,螺纹副当量摩擦角 'arctan 'arctan 0.08~arctan 0.10 4.5739~5.7106f ρ===,取'5.7106ρ=(由表5.10的注 释知,大值用于启动时,人力驱动属于间歇式,故应取用大值)。把数据代入(3)式中,得 把数据代入(2)式中,得 由参考文献[1]表5.9可以查得螺杆材料的许用应力 s []4σ σ= (4) 其中s 355 MPa σ=,则 []88.75a MP σ= 显然,e []σσ<,螺杆满足强度条件。 四 螺母螺牙强度校核 螺母螺纹牙根部的剪切强度条件为 4[]Q F Z D b ττπ= ≤ (5) 式中:Q F -----轴向载荷,N ; 4D -----螺母螺纹大径,mm ; 126.5 30000tan(2.0637 5.1427)502612T N mm =??+?= ?70.4e MPa σ==
哈工大机械设计大作业
哈尔滨工业大学 机械设计作业设计计算说明书 题目: 轴系部件设计 系别: 英才学院 班号: 1436005 姓名: 刘璐 日期: 2016.11.12
哈尔滨工业大学机械设计作业任务书 题目:轴系部件设计 设计原始数据: 图1 表 1 带式运输机中V带传动的已知数据 方案d P (KW) (/min) m n r(/min) w n r 1 i轴承座中 心高H(mm) 最短工作 年限L 工作 环境 5.1. 2 4 960 100 2 180 3年3班 室外 有尘 机器工作平稳、单向回转、成批生产
目录 一、带轮及齿轮数据 (1) 二、选择轴的材料 (1) 三、初算轴径d min (1) 四、结构设计 (2) 1. 确定轴承部件机体的结构形式及主要尺寸 (2) 2. 确定轴的轴向固定方式....................................... 错误!未定义书签。 3. 选择滚动轴承类型,并确定润滑、密封方式 .................. 错误!未定义书签。 4. 轴的结构设计................................................ 错误!未定义书签。 五、轴的受力分析 (4) 1. 画轴的受力简图 (4) 2. 计算支承反力 (4) 3. 画弯矩图 (5) 4. 画扭矩图 (5) 六、校核轴的强度 (5) 七、校核键连接的强度 (7) 八、校核轴承寿命 (8) 1. 计算轴承的轴向力 (8) 2. 计算当量动载荷 (8) 3. 校核轴承寿命 (8) 九、绘制轴系部件装配图(图纸) (9) 十、参考文献 (9)
哈工大机电系统控制第三章答案-
3-1 题图3-1所示的阻容网络中,i ()[1()1(30)](V)u t t t =--。当t =4s 时,输出o () u t 值为多 少?当t 为30s 时,输出u o (t )又约为多少? 解:661(s)111 1(s)1110410141o i U sC U RCs s R sC -====+???+++ (4)0.632(V)o u ≈,(30)1(V) o u ≈ 3-2 某系统传递函数为21 ()56 s s s s +Φ= ++,试求其单位脉冲响应函数。 解: 2(s)112 (s)5623 o i X s X s s s s +-==+++++ 其单位脉冲响应函数为 23(t)(e 2e )1() t t x t δ--=-+? 3-3 某网络如图3-3所示,当t ≤0-时,开关与触点1接触;当t ≥0+时,开关与触点2接触。 试求输出响应表达式,并画出输出响应曲线。 1V 题图3-1 题图3-3 解: 1(s)1 1(s)2121()o i R U RCs s sC U RCs s R R sC + +===++++ 01(t)1(2)1()(V)i i i u u u t =+=+-? 1111212 (s)(s)121212 o i s s U U s s s s s ++-= ==-+++ 则
2 1(t)(e 2)1()(V) t o u t - =-? 12 01(t)1(e 2)1()(V) o o o u u u t -=+=+-? 其输出响应曲线如图3-3所示 图3-3 题图3-4 3-4 题图3-4所示系统中,若忽略小的时间常数,可认为 1d 0.5()d y B s x -=?。其中,ΔB 为阀芯位移,单位为cm ,令a =b (ΔB 在堵死油路时为零)。 (1) 试画出系统函数方块图,并求(s)(s) Y X 。 (2) 当i ()[0.51()0.51(4)1(40)]cm x t t t s t s =?+?---时,试求t =0s,4s,8s,40s,400s 时的y (t )值,()B ?∞为多少? (3) 试画出x (t )和y (t )的波形。 解:(1)依题意可画出如图3-4所示的系统函数方块图, 图3-4-1 则
机电控制技术基础2016复习题
机电控制技术基础2016复习题
第1章概论 单选题 1. 在机电设备驱动的发展中,成组拖动的含义是【】 A. 多台电机拖动一台设备 B. 一台电机拖动一台设备 C. 多台电机拖动多台设备 D. 一台电机拖动多台设备 2. 机电传动系统的五大组成除了有电源、电气控制、传动机构、工作机构,还有的是【】 A.继电器 B.接触器 C.电动机 D.机械手 3. 研究机电传动系统的运动规律时,系统中的电动机种类是【】 A. 交流电动机 B. 直流电动机 C. 控制电机 D. 不分类 4. 一般在机电控制系统中的机械设备是【】 A. 控制对象 B. 控制方法 C. 控制规律 D. 控制指标 5. 机电传动系统中拖动生产机械的原动机是
【】 A. 汽油机 B. 柴油机 C.水轮机 D. 电动机 6. 以下不.是拖动机电传动系统的原动机是 【】 A.直流电动机 B.交流电动机 C. 汽油机 D. 步进电动机 7. 组成机电系统三大部分的是电气控制系统、电力拖动或机电传动和【】 A. 机械运动部件 B.发电机 C.汽油机 D. 水轮机 8. 以下不.是组成机电系统三大部分的是 【】 A. 电气控制系统 B. 机械运动部件 C. 发电机 D. 电力拖动 9. 机电传动系统的目的是将电能转变为 【】 A. 光能 B. 核能 C. 热能 D. 机械能 10. 机电传动中成组拖动是指一台电动机拖动【】 A. 多台发电机 B. 多台生产机械 C.
一台生产机械 D. 一台发电机 11. 机电传动的目的是【】 A. 将电能转变为机械能 B. 将机械能转变为电能 C. 将光能转变为机械能 D. 将机械能转变为光能 12. 一般机电系统正常工作时要求速度是【】 A. 稳速 B. 加速 C. 减速 D. 零 13. 一般机电系统快速返回时要求速度是【】 A. 稳速 B. 加速 C. 减速 D. 零 14. 一般机电传动的任务包括实现生产机械的启动、停止,以及【】 A. 维修 B. 保养 C. 调速 D. 能量转换 15. 在自动控制系统中,被控对象的输出量要求按照给定规律运行的是【】 A. 温度 B. 压力 C. 液位 D. 加工轮廓 16. 在自动控制系统中,被控对象的输出量要求保持为某一恒定值的是【】
哈工大机械原理大作业-凸轮机构设计(第3题)
机械原理大作业二 课程名称:机械原理 设计题目:凸轮设计 院系:机电学院 班级: 1208103 完成者: xxxxxxx 学号: xx 指导教师:林琳 设计时间:
工业大学 凸轮设计 一、设计题目 如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(6 50π?≤ ≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,6 50π =Φ带入正弦加速度运动规律的升程段方程式中得: ??? ?? ???? ??-=512sin 215650?ππ?S ;
?? ? ?????? ??-= 512cos 1601ππωv ; ?? ? ??= 512sin 1442 1?π ωa ; 2、凸轮推杆推程远休止角运动方程( π?π ≤≤6 5) mm h s 50==; 0==a v ; 3、凸轮推杆回程运动方程(9 14π ?π≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,9 5'0π= Φ,6 s π = Φ带入余弦加速度运动规律的回程段方程式中得: ?? ? ???-+=)(59cos 125π?s ; ()π?ω--=59 sin 451v ; ()π?ω-=59 cos 81-a 21; 4、凸轮推杆回程近休止角运动方程(π?π 29 14≤≤) 0===a v s ; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。 ①位移线图 编程如下: %用t 代替转角 t=0::5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6::pi; s=50; hold on plot(t,s); t=pi::14*pi/9; s=25*(1+cos(9*(t-pi)/5));
哈工大机电控制系统 大作业一
设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定转速48V ; 额定电流4A ; 额定转速=500r/min ; 电枢回路总电阻8=R Ω; 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* *im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。
1.计算电流和转速反馈系数 电流反馈系数:)(A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm === α 2.电流环的设计 (1)确定时间常数 电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.01000 1011=?== , 按电流环小时间常数的近似处理方法,取 s T T T oi s i 0003.00002.00001.0=+=+=∑ (2)选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= (3)选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流环按超调量%5≤i σ考虑,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ (4)检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。
机电控制工程基础综合练习概念题
《机电控制工程基础》综合练习概念题解析 一、填空 1. 自动控制就是 人直接参与的情况下, 使生产过程的输出量按照给定的规律 。 (没有,运行或变化) 2.系统的稳定性取决于 。(系统闭环极点的分布) 3. 所谓反馈控制系统就是的系统的输出 地返回到输入端。(全部或部分) 4. 给定量的变化规律是事先不能确定的,而输出量能够准确、迅速的复现给定量,这样的 系统称之为 。(随动系统) 5. 在 下,输出量的拉氏变换与输入量的拉氏变换之比称为线性系统(或元件)的 。 (零初始条件,传递函数) 6. 单位积分环节的传递函数为 。(1/s ) 7.一阶系统1 1+Ts ,则其时间常数为 。(T ) 8.系统传递函数为W(s),输入为单位阶跃函数时,输出拉氏变换Y (s)为 。(s s W ) () 9.单位负反馈系统开环传函为) 1(9)(+=s s s G ,系统的阻尼比ξ= 、无阻尼自振荡角频率ωn 为 ,调节时间ts (5%)为 秒。(0.167,3,6) 10.反馈信号(或称反馈):从系统(或元件)输出端取出信号,经过变换后加到系统(或元件) 输入端,这就是反馈信号。当它与输入信号符号相同,即反馈结果有利于加强输入信号的作 用时叫 。反之,符号相反抵消输入信号作用时叫 。(正反馈, 负反馈) 11.Ⅰ型系统 地跟踪单位斜坡输入信号。(无静差) 12. 某环节的传递函数为2s ,则它的幅频特性的数学表达式是 ,相频特性的 数学表达式是 。(2ω,90o) 13.单位反馈系统的开环传递函数为) 3)(2()(* ++=s s s K s G ,根轨迹的分支数为 。(3) 14. 负反馈结构的系统,其前向通道上的传递函数为G(s),反馈通道的传递函数为H(s),则 该系统的开环传递函数为 ,闭环传递函数为 。 (G(s)H(s),)()(1) (s H s G s G +) 15. 函数f(t)=2t 的拉氏变换为 。(22 s ) 16.单位负反馈结构的系统,其开环传递函数为) 2(+s s K 则该系统为 型系统,根轨迹分支数为 。(Ⅰ, 2) 17.线性系统的稳态误差取决于 和 。(系统自身结 构与参数,外输入) 18.自动控制技术一大特点是能提高 。(劳动生产率) 19. 对于一般的控制系统,当给定量或扰动量突然增加时,输出量的 过程不一定是 衰减振荡。(暂态) 20.对于一般的控制系统,当给定量或扰动量突然增加某一给定值时, 的 过程 可能出现单调过程。 (输出量, 暂态) 21. 是指要求实现自动控制的机器、设备或生产过程。(被控制对象) 22. 单位负反馈系统的开环传递函数为) 1(2)(+=s s s G ,系统的开环极点
哈尔滨工业大学机械设计大作业——V带传动设计说明书
目录 一 任务书 (2) 二 选择电动机 (3) 三 确定设计功率d P (3) 四 选择带的型号 (3) 五 确定带轮的基准直12d d d d 和 (3) 六 验算带的速度 (4) 七 确定中心距a 和V 带基准长d L (4) 八 计算小轮包1 (4) 九 确定 V 带Z (4) 十 确定初拉0F (5) 十一 计算作用在轴上的压Q (6) 十二 带轮结构计 (6) 十三 参考文献 (7) 十四 附表 (7)
一哈尔滨工业大学 机械设计作业任务书题目:带式运输机 结构简图见下图: 原始数据如下: 机器工作平稳,单向回转,成批生产
二 选择电动机 由方案图表中的数据要求,查表-1 Y 系列三相异步电动机的型号及相关数据选择可选择Y100L1-4。 可查得轴径为28mm,长为50mm. 三 确定设计功率d P 设计功率是根据需要传递的名义功率、载荷性质、原动机类型和每天连续工作的时间长短等因素共同确定的,表达式如下: d A m P K P = 式中 m P ——需要传递的名义功率 A K ——工作情况系数,按表2工作情况系数A K 选取A K =1.4; 考虑到本装置的工作环境,A K 值应扩大1.1倍 所以 1.1 1.4 2.2 3.388d A m P K P KW ==??= 四 选择带的型号 查看教材图7.11可选取A 型带。 五 确定带轮的基准直径12d d d d 和 查表3. V 带带轮最小基准直径min d d 知A 型带min d d =75mm,又由教材表7.3选取 小带轮基准直径:1100d d mm =; 大带轮基准直径:211 2.3100230d d d i d mm ==?= 查教材表7.3选取大带轮基准直径2224d d mm =; 其传动比误差224 2.3100100% 2.6%5%2.3 i - ?=?=<,故可用。 六 验算带的速度 11 1001420 7.43/601000 601000 d d n v m s ππ??= = =?? 式中 1n --电动机转速; 1d d ——小带轮基准直径;
哈工大_机电系统控制基础实验_指导书
前言 《机电系统控制基础》既是一门理论性较强、又紧密联系工程实际的实践性较强的课程,本课程的重点在于培养学生对机电系统进行建模、分析与控制的能力。难点在于如何使机电类专业的学生结合工程实际,特别是结合机械工程实际,从整体分析系统的动态行为,理解和掌握略显深奥、难懂的经典控制理论,并应用经典控制论中的基本概念和基本方法来分析、研究和解决机械工程中的实际问题。 通过实验教学环节使学生验证课堂教学的理论,使学生能够建立机电系统控制的整体概念,加深对经典控制论中基本概念和基本方法的理解,并掌握其在分析、研究和解决实际机械工程控制问题中的应用。通过三方面的实验:原理性仿真实验,面向机电系统中典型物理对象/系统的特性测试与分析实验,和典型机电系统的控制三方面实验。将所学的课程内容融会贯通,培养学生分析和解决问题的能力。
1 机电系统控制基础原理性仿真实验 1.1 实验目的 通过仿真实验,掌握在典型激励作用下典型机电控制系统的时间响应特性,分析系统开环增益、系统阻尼、系统刚度、负载、无阻尼自振频率等机电参数对响应、超调量、峰值时间、调整时间、以及稳态跟踪误差的影响;掌握系统开环传递函数的各参数辨识方法,最后,学会使用matlab软件对机电系统进行仿真,加深理解系统动态响应特性与系统各参数的关系。 1.2系统典型输入的响应实验 1.2.1 实验原理 1.一阶系统的单位脉冲响应 惯性环节(一阶系统)单位脉冲响应simulink实现图,如图1-1所示 (a)可观测到输出曲线 (b)输入、输出曲线均可观测到 图1-1惯性环节(一阶系统)单位脉冲响应simulink实现图 2.一阶系统的单位阶跃响应 一阶系统的单位阶跃响应simulink实现图如图1-2所示。
哈尔滨工业大学机械设计课程大作业螺旋起重机的设计千斤顶哈工大
工业大学 机械设计课程大作业 螺旋起重机的设计 (最终版) 设计人:段泽军 学号: 1120810810 院系:机电工程学院 专业:机械设计制造及其自动化 班级: 1208108
目录 机械设计大作业任务书 .................................. - 1 -一,螺杆、螺母材料的选择 .............................. - 2 -二,耐磨性设计........................................ - 2 -三,螺杆强度设计...................................... - 2 -四,螺母螺纹牙强度校核 ................................ - 2 -五,自锁条件校核...................................... - 3 -六,螺杆的稳定性校核 .................................. - 3 -七,螺母外径及凸缘设计 ................................ - 4 -八,手柄设计.......................................... - 4 -九,底座设计.......................................... - 6 -十,其他配件设计...................................... - 7 -十一,参考文献........................................ - 7 -
哈工大机电系统控制基础实验报告材料 二
姓名:高超学号:1120830223 课程名称:机电系统控制基础实验 实验序号:二实验日期:2014.12.2 实验室名称:机电系统控制基础实验室 同组人:晏理邦赵京昊 实验成绩:总成绩: 教师评语: 教师签字: 年月日
一、实验目的 熟悉直流伺服电动机角位置控制系统的组成及各环节工作原理,包括:电动机参数、增量式码盘精度、机械负载惯量、信号采样频率、死区、控制方法等与角位置伺服系统控制性能指标的关系,针对该典型机电对象或系统,掌握输入信号的设置与离散方法,输出信号的采集与归一化方法,通过速度阶跃响应进行系统参数辨识,通过扫频法,测试系统的频域特性的相位特性和幅频特性曲线,分析系统的稳定性、快速性并掌握系统PID 控制的离散方法,主要目的是培养学生进行基本性能实验和综合设计实验的能力。 1、掌握各环节的设计方法; 2、掌握机电系统基本调试方法; 3、通过扫频法,绘出系统的对数频率特性曲线,从实验数据曲线上,分析系统的稳定性、稳定裕度、快速性、频带宽、校正环节的形式与基本离散化方法。 二、实验原始数据及数据处理 表2.1 不同频率的输入和输出信号幅值关系
表 2.2 不同频率的输入和输出信号相位差
2.5 101 6.7 12 3.24 8.5 130.2 10.3 139.16 3.0 105.6 6.8 123.96 9.0 130.8 10.4 140.88 3.5 110.2 6.9 12 4.68 9.5 131.4 10.5 141.6 4.0 114.8 7.0 12 5.4 9.6 132.12 11.0 145.2 4.5 116.4 7.1 126.12 9.7 132.84 11.5 153.8 5.0 118 7.2 12 6.84 9.8 133.56 12.0 160.4 三、绘制同一频率输入/输出信号的时域曲线 图一:5HZ输入信号时域曲线
- 哈工大机电系统控制第三章答案
- 哈工大机电系统控制第三章答案-教学内容
- 哈工大机电系统控制实验报告
- 哈工大_机电系统控制基础实验_实验一
- 哈工大机电系统控制第三章答案
- 哈工大机电控制系统 大作业一
- 哈工大机电系统控制第三章答案
- 哈工大机电控制大作业
- 哈工大机电系统控制第三章答案-汇编
- 哈工大机电系统智能控制 第一章 概述
- 哈工大《机电系统控制器与应用》实验报告
- 哈工大研究生选修课机电系统智能控制读书报告
- 哈工大机电系统控制基础大作业一
- 哈工大机电系统控制基础2014秋 习题课第三章答案
- (精选)哈工大机电系统控制基础2014秋-习题课第三章答案
- 哈工大机电系统控制实验报告二
- 哈工大机电系统控制基础2014秋-习题课第三章答案
- 哈工大机电系统控制第三章答案-
- 哈工大机电控制大作业完美高分
- 哈工大机电系统控制基础秋-习题课第三章答案