第04章_khdaw
4-1 设单位反馈控制系统的开环传递函数
1
)(+=?
s K s G
试用解析法绘出?
K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:
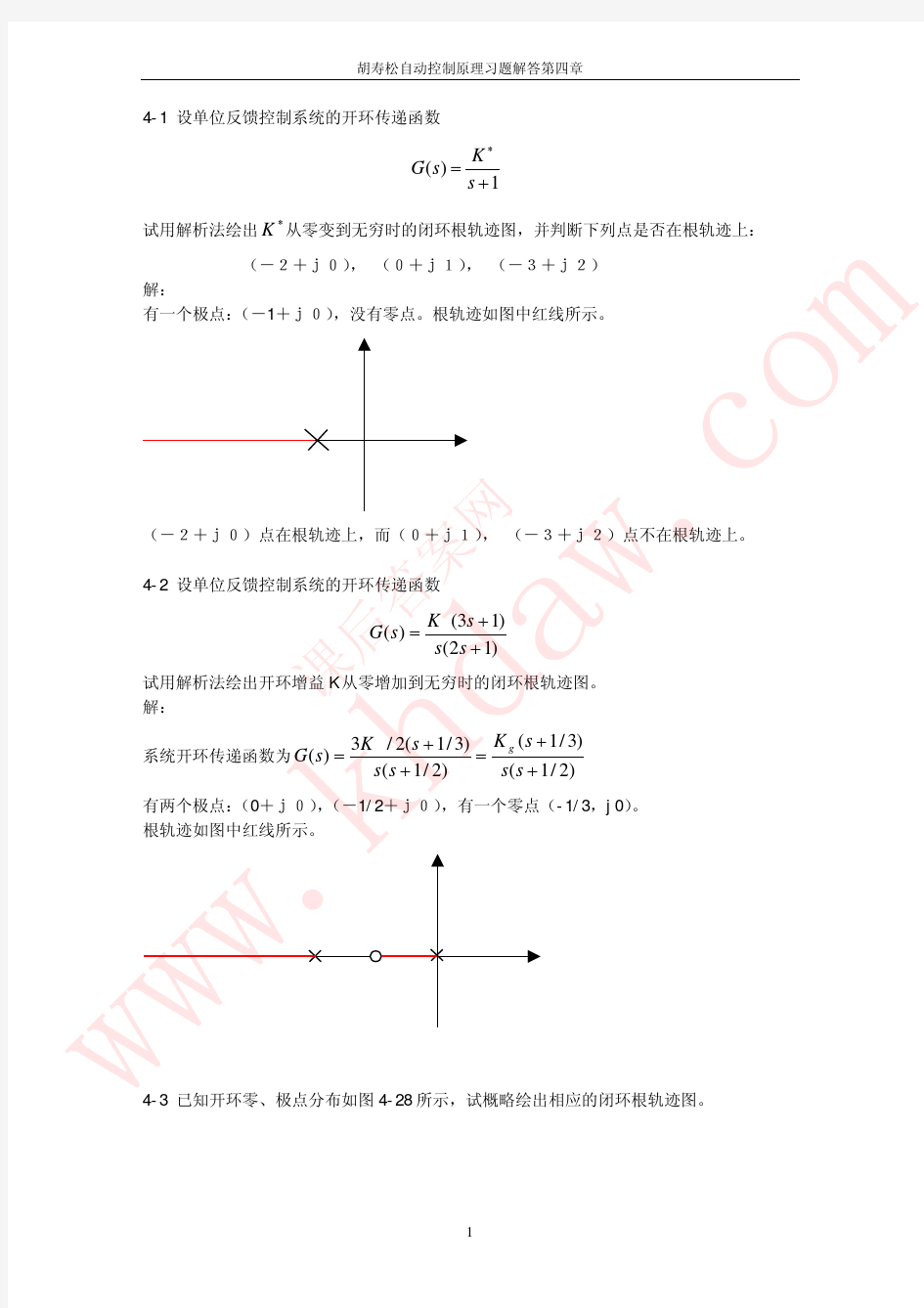
有一个极点:(-1+j0),没有零点。根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数
)
12()
13()(++=
s s s K s G
试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。 解:
系统开环传递函数为)
2/1()
3/1()2/1()3/1(2/3)(++=++=
s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。 根轨迹如图中红线所示。
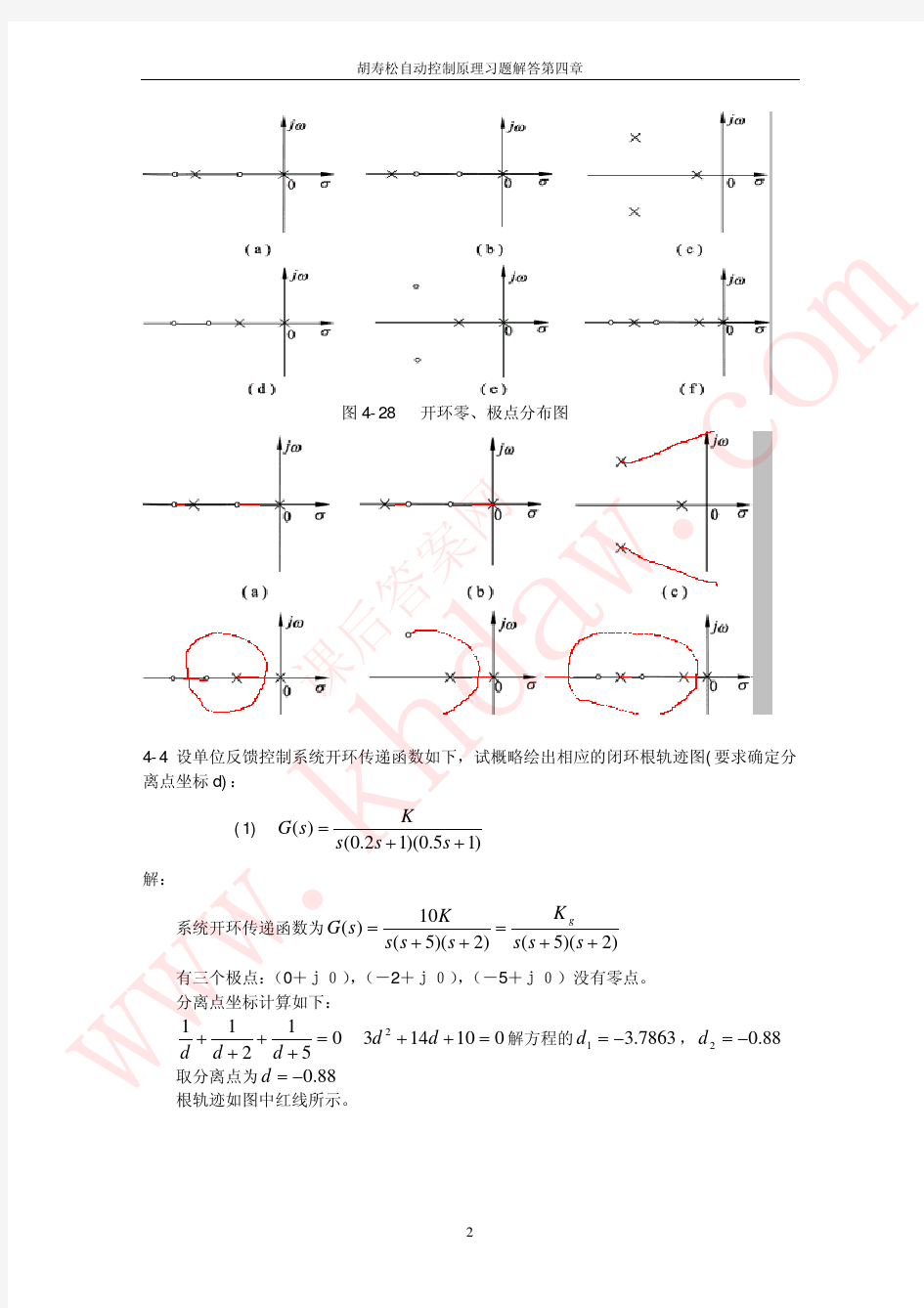
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
w h d
a w .c o m
课
后
答案
图4-28 开环零、极点分布图
4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d):
(1) )
15.0)(12.0()(++=s s s K
s G
解:
系统开环传递函数为)
2)(5()2)(5(10)(++=
++=s s s K s s s K
s g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。 分离点坐标计算如下:
051211=++++d d d 3解方程的010142=++d d 7863.31?=d ,d 88.02?=取分离点为88.0?=d
根轨迹如图中红线所示。
w w w
.k
h d
a w .c o m
课
后
答案
网
(2) )
12()
1()(++=s s s K s G
解:
系统开环传递函数为)
5.0()
1()5.0()1(2/)(++=++=s s s K s s s K s g G
有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。 分离点坐标计算如下:
1
15.011+=
++d d d 解方程的05.022
=++d d 7.11?=d ,d 29.02?=取分离点为7.11?=d ,29.02?=d
根轨迹如图中红线所示。
(3) )
3)(2()
5()(*+++=
s s s s K s G 解:
系统开环传递函数为)
3)(2()
5()(*+++=
s s s s K s G 有三个极点:(0+j0),(-2+j0),(-2+j0),有一个零点(-5+j0)。 分离点坐标计算如下:
5
131211+=
++++d d d d 解方程的,01525102
3=+++d d d 5171.61?=d w w w
a w .c o m
课
后
答案
网
5964.22?=d d
,
8865.03?=d 8865.0?pi θ取分离点为 =根轨迹如图中红线所示。
4-5 已知单位反馈控制系统开环传递函数如下,试概略画出相应的闭环根轨迹图(要求算出起始角):
(1) )
21)(21()
2()(j s j s s K s G ?++++=?
解:
系统开环传递函数为)
21)(21()2()21)(21()
2()(j s j s s K j s j s s K s g ?+++G +?++++=
? 有两个极点:(-1+j2),=1p =2p (-1-j2),有一个零点(-2,j0)。 起始角:
L ,2,1,0)12()(11±±=
?++=∑∑≠==k k n i j j p p m j p z p
i i i j i
θ?πθ
00001359045180121
11
=?+=?+=p p p z p θ?πθ
00002259045180
2
12
12
=+?=?+=p p p z p θ?πθ
根轨迹如图中红线所示。
w
.k
h d
a w .c o m
课
后
答案
网
(2) )
1010)(1010()
20()(j s j s s s K s G ?++++=?。
解:
系统开环传递函数为)
1010)(1010()
20()(j s j s s s K s ?++++=
?G 有三个极点:p (0,
j0),p (-10+j10),=1=2=3p (-10-j10),有一个零点(-20,j0)。 =1z 起始角:
L ,2,1,0)12()(11±±=
?++=∑∑≠==k k n i j j p p m j p z p
i i i j i
θ?πθ
01801
=p θ
000000090135451801802
32
1212=??+=??+=p p p p p z p θθ?θ
000000090135451801803
23
13
13
=++?=??+=p p p p p z p θθ?θ
根轨迹如图中红线所示。
4-6 设单位反馈控制系统的开环传递函数如下,要求:
(1) 确定 )
10)(1()(++=?
s s s K s G 产生纯虚根的开环增益值。
解:系统特征方程为
01011*
2
3
=+++K s s s 令ωj s =代入特征方程中得: 实部方程为:
0112*
=?ωK 虚部方程为:10
03
=?ωωw w w
a w .c o m
后
答案
网
解上述方程得: 开环增益按一般定义:
102=ω110*=K 1110/*
==K K (2) 确定 )
20)(10()()(2+++=?s s s z s K s G 产生纯虚根为±j1的z值和?
K 值。
解:系统特征方程为 020030*
*
2
3
4
=++++z K s K s s s 令代入特征方程中得: 1j s =实部方程为: 02001*
=?+z K 虚部方程为:
030*=?K 解上述方程得: 30*=K 30/199=z
(3)概略绘出确定 )
23)(23)(5.3)(1()(j s j s s s s K s ?+++++=
?
G 的闭环根轨迹图。(要求确定根轨迹的分离点、起始角和与虚轴的交点)。
解:系统开环传递函数为)
23)(23)(5.3)(1()(j s j s s s s K s ?+++++=
?
G 有五个极点:(0,j0)
,(-1,j0),=1p =2p =3p (-3.5,j0),(-3,j2),(-3,-j2),没有零点。
=4p =5p 分离点坐标计算如下:
02
.312.315.31111=?+++++++++j d j d d d d 05.451465.111354234=++++d d d d 解方程的5.31?=d ,,
44.02?=d 265.14.23j d +?=265.14.24j d ??=取分离点为
44.0?=d
起始角:
L ,2,1,0)12()(11±±=
?++=∑∑≠==k k n i j j p p m j p z p
i i i j i
θ?πθ
w w w
.k
h d
a w .c o m
课
后
答案
网
01801
=p θ
002
=p θ
000000937.759013545.14618018035343
23
13
=????=????=p p p p p p
p p p θθθθθ 000004
0937.759013545.146180180354324
14
?=++++=????=p p p p p p
p p p θθθθθ
根轨迹如图所示。
与虚轴的交点:令ωj s =代入特征方程中
05.455.795.435.10*2345=+++++K s s s s s
得到:
w w w
.k
h d
a w .c o m
课
后
答案
网
实部方程为:10 05.795.*
2
4
=+?K ωω虚部方程为:
05.455.433
5
=+?ωωω解方程得到:5136.61=ω 0356.12=ω,将5136.61=ω代入实部方程得到不
符合要求,将0*
73* =K 所以取0356.1=ω 即根轨迹与虚轴的交点为0356.1±=ω 4-7 设单位反馈系统的开环传递函数为 ) 1() 2()(++= ?s s s K s G 其根轨迹图见图4-2。试从数学上证明:复数根轨迹部分是以(-2,j0)为圆心,以2为半 径的一个圆。 图4-2 系统根轨迹图 解:证明如下: 根据辐角条件可知,根轨迹各点应满足 0180)1()2(=+∠?∠?+∠s s s 在复平面上ωσj s +=,于是得 0180)1()()2(=++∠?+∠?++∠ωσωσωσj j j 亦即 01801arctan arctan 2arctan ++=?+σ ωσωσ ω 利用反正切公式 XY Y X Y X +?=?1arctan arctan arctan 可把上式改写为 对上式的两边取正切,整理后即得圆方程式 w w w .k h d a w .c o m 课 后 答案 网 2)2(22=++ωσ 它的圆心为(-2,j0)半径等于2。这个圆与实轴的交点即为分离点和会合点。 证毕。 4-8 已知开环传递函数为 ) 204)(4()()(2 * +++=s s s s K s H s G 试概略画出闭环系统根轨迹图。 解:系统开环传递函数为 ) 204)(4()()(2* +++= s s s s K s H s G 有四个极点:(0,j0),=1p =2p (-4,j0),=3p (-2,j4),(-2,-j4),没有零点。 =4p 分离点坐标计算如下: 04 .21 4.21411=?+++++++j d j d d d 即解方程的0)42)(2082(2 =+++d d d 21?=d ,d 45.222j +?=, 45.223j d ??=取分离点为,d ,21?=d 45.222j +?=45.223j d ??= 起始角: L ,2,1,0)12()(11±±= ?++=∑∑≠==k k n i j j p p m j p z p i i i j i θ?πθ 01801 =p θ 0902 ?=p θ 903 +=p θ 004 =p θ 根轨迹如图所示。 w w w .k h d a w .c o m 课 后 答案 网 4-9已知开环传递函数为 2 2 *) 94()2()(+++=s s s K s G 试概略绘制其闭环系统根轨迹。 解:系统有四个极点:(-2,j2.24),=1p =2p =3p =4p (-2,-j2.24),有一个零点(-2,j0)。 =1z 分离点坐标计算如下: 2 124.22224.222+= ?++++d j d j d 即解方程的071232 =++d d 29.31?=d ,71.02?=d , 取分离点为 29.31?=d 起始角: L ,2,1,0)12()(11±±= ?++=∑∑≠==k k n i j j p p m j p z p i i i j i θ?πθ w w w .k h d a w .c o m 课 后 答案 网 090 180)12(909090180)12(,2,1,0180)12(21?+=??++=±±=?++=k k k k i i i j p p p z p L θ?θ 所以:同理 0 225,451=p θ0 45,1352?=p θ系统根轨迹如下图: 4-10 设单位反馈控制系统的开环传递函数 ) 102.0)(101.0()(++= s s s K s G 要求: (1) 画出准确根轨迹(至少校验三点); (2) 确定系统的临界稳定开环增益K c; (3) 确定与系统临界阻尼比相应的开环增益K 。 解:系统开环传递函数为 ) 50)(100()50)(100(5000)102.0)(101.0()(* ++=++=++=s s s K s s s K s s s K s G 有三个极点:(0,j0) ,=1p =2p (-50,j0),=3p (-100,j0),没有零点。 分离点坐标计算如下: 0100 1 5011=++++d d d 即解方程3得050003002 =++d d 9.781?=d ,1.212?=d , w w w .k h d a w .c o m 课 后 答案 网 取分离点为, 1.21?=d 起始角: L ,2,1,0)12()(11±±= ?++=∑∑≠==k k n i j j p p m j p z p i i i j i θ?πθ 01801 =p θ 002 =p θ01803 =p θ 根轨迹如图所示。 (2)令ωj s =代入系统特征方程中 05000150* 2 3 =+++K s s s 得到实部方程为: 01502* =?ωK 虚部方程为:5000 03=?ωω解方程得:7.70=ω 所以750000* =K 150=c K (3)令代入系统特征方程中 1.21?=s 05000150* 2 3 =+++K s s s 得到 系统临界阻尼比相应的开环增益48112* =K 62.9=K w w w .k h d a w .c o m 课 后 答案 网 4-11 一单位反馈系统,其开环传递函数 ) 258() 256(9.6)(2 2++++=s s s s s s G 试用根轨迹法计算闭环系统根的位置。 解:系统特征方程为:s 0)256(9.6)258(2 2 =+++++s s s s 即:s 05.1724.669.142 3 =+++s s -9.9780 -2.4610 + 3.3513i -2.4610 - 3.3513i 解方程得: 978.91?=s 3513.3461.22j s +?= 3513.3461.23j s ??= 所以:闭环系统根的位置为s 3513.3461.22j +?= 3513.3461.23j s ??= 根轨迹如图所示: 4-12 设反馈控制系统中 1)(, ) 5)(2()(2* =++=s H s s s K s G 要求: (1) 概略绘出系统根轨迹图,并判断闭环系统的稳定性; (2) 如果改变反馈通路传递函数,使s s H 21)(+=,试判断改变后的系统稳定性, )(s H w w w .k h d a w .c o m 课 后 答 案 网 研究由于改变所产生的效应。 )(s H 21+=)(22(*+s s K 解:(1)系统有四个极点,)0,0(1j p =)0,0(2j p =,)0,2(3j p ?=,;没有零点。 )0,5(4j p ?=系统根轨迹如下图: 所以闭环系统不稳定。 (2)如果s s H )(,这时系统的开环传递函数为: ) 5)(2()5.0()5()1)()(22+++=++=s s s s K s s s H s G g 其中 * 2K K g =系统根轨迹如下图: w w w .k h d a w .c o m 课 后 答案 网 这时系统的特征方程为: 05.0107)5.0()5)(2(2342=++++=++++g g g K s K s s s s K s s s 令ωj s =代入特征方程中,得到: 实部方程为: 05.0102 4 =+?g K ωω虚部方程为: 073 =?ωωg K 解上述方程得到:这是系统的临界稳定的放大倍数。即闭环系统稳定。 5.45=g K 75.220* < (1) 02322 3 =++++K Ks s s s (2) 010)2(323 =++++K s K s s (1)解:设等效单位反馈传递函数为s s s s K s 32) 2()(2 3G +++= 则系统的特征方程为:s 02322 3 =++++K Ks s s 系统有三个极点:(0,j0),=1p =2p (-1,j1.414),=3p (-1,-j1.414),有一个零点(-2,j0)。 =1z w w w .k h d a w .c o m 课 后 答案 网 系统根轨迹如下图: (2)解:设等效单位反馈传递函数为s s s s K s 23) 10()(23G +++= 则系统的特征方程为:s 010)2(32 3 =++++K s K s 系统有三个极点:(0,j0),=1p =2p (-1,j0),=3p (-2,j0),有一个零点=1z (-10,j0)。 分离点坐标计算如下: 10 121111+=++++d d d d 即解方程的020603322 3 =+++d d d 4344.01?=d ,59.12?=d , d 5.143?=取分离点为 4344.01?=d 系统根轨迹如下图: w w w .k h d a w .c o m 课 后 答案 网 4-14 设系统开环传递函数如下,试画出b 从零变到无穷时的根轨迹图。 (1)) )(4(20 )(b s s s ++= G (2)) 10() (30)(++= s s b s s G 解:(1)系统的特征方程为: 0)4(20420))(4(2 =++++=+++s b s s b s s 系统的等效单位反馈传递函数为:20 4) 4()(2 +++= s s s b s eq G 系统有两个极点)4,2(1j p ?=,)4,2(2j p ??=,有一个零点)0,4(1j z ?= 系 统 根 轨 迹 图 如 下 : w w w .k h d a w .c o m 课 后 答案 网 (2)系统的特征方程为: 03040)(30)10(2 =++=+++b s s b s s s 系统的等效单位反馈传递函数为:s s b s s b s eq 404030)(2* 2G +=+= 系统有两个极点)0,0(1j p =,)0,40(2j p ?=,没有零点。 系统根轨迹图如下: w w w .k h d a w .c o m 课 后 答案 网 4-15 设控制系统结构图如图4-29所示,试概略绘制其根轨迹图。 解:系统开环传递函数为 2 2 *) 2()1()(++=s s K s G 系统有两个极点,,有两个零点)0,2(21j p p ?==)0,1(21j z z ?== 系统根轨迹如下图: w w w .k w .c o m 答案 网 4-16 设单位反馈控制系统的开环传递函数 ) 2() 1()(+?=?s s s K s G 试绘制其根轨迹图,并求出使系统产生重实根和纯虚根的? K 值。 解:系统开环传递函数为) 2() 1()(+??=?s s s K s G 系统有两个极点,)0,2(),0,0(21j p j p ?==,有一个零点)0,1(1j z = 这是一个零度根轨迹。 系统根轨迹如下图: 分离点坐标计算如下: 1 1211?=++d d d .k h d a w .c o m 课 后 答案 网 一、概念题 1.正方体仅受两个力偶作用,该两力偶矩矢等值、反向,即21M M =,但不共线,则正方体① 。 ①?平衡; ②?不平衡; ③?因条件不足,难以判断是否平衡。 2.将大小为100N 的力F 沿x 、y 方向分解,若F 在 x 轴上的投影为?N ,而沿x 方向的分力的大小为?N , 则F 在y 轴上的投影为① 。 ①?0;②?50N ;③?;④?;⑤?100N 。 3.平面平行力系的五个力分别为F 1?=?10 N ,F 2?=?4 N ,F 3?=?8 N ,F 4?=?8 N 和F 5?=?10 N ,则该力系简化的最后结果为大小为40kN ·m ,转向为顺时针的力偶。 4.平面力系如图,已知F 1?=F 2?=?F 3?=?F 4?=F ,则: (1)力系合力的大小为F F 2R =; (2)力系合力作用线距O 点的距离为)12(2 -= a d ; (合力的方向和作用位置应在图中画出)。 5.置于铅垂面内的均质正方形簿板重P ?=?100kN ,与地面间的摩擦系数f ?=?,欲使簿板静止不动,则作用在点A 的力F 的最大值应为 。 6.刚体作平面运动,某瞬时平面图形的角速度为?,A 、B 是平面图形上任意两点,设AB ?=?l ,今取 CD 垂直AB ,则A 、B 两点的绝对速度在CD 轴上的投影的差值为 l ω 。 7.直角三角形板ABC,一边长b,以匀角速度??绕轴C转动,点M以s?=?v t自A沿AB边向B运动,其中v为常数。当点M 通过AB边的中点时,点M的相对加速度a r?=? 0;牵连加速度a e?=? bω2,科氏加速度a C?=? 2vω (方向均须由图表示)。 8.图示三棱柱ABD的A点置于光滑水平面上,初始位置AB边铅垂,无初速释放后,质心C的轨迹为B。 A.水平直线 B.铅垂直线 C.曲线1 D.曲线2 9.均质等边直角弯杆OAB的质量共为2?m,以角速 度ω绕O轴转动,则弯杆对O轴的动量矩的大小为 C。 A.L O?=?2 3 ml2ωB.L O ?=? 4 3 ml2ω C.L O?=?5 3 ml2ωD.L O ?=? 7 3 ml2ω 10.如图所示,质量分别为m、2m的小球M 1、M2,用长为l而重量不计的刚杆相连。现将M 1 置于光滑水平面上,且M1M2与水平面成60°角。如无初速释放、则当小球M2落地时,M1球移动的水平距离为向左移动l/3。 11.如图所示系统由匀质圆盘与匀质细杆铰连而成。 已知:圆盘半径为r、质量为M,杆长为l,质量为m。在 图示位置,杆的角速度为??、角加速度为??,圆盘的角速度、角加速度均为零。则系统惯性力系向定轴O简化后, 其主矩为。 4-1 图示为一轧纸钳,其尺寸如图所示。工作时上、下钳口保持平行,设手握力为P ,求作用于纸片上的力Q 的大小。 解: 1)取整个轧纸钳为研究对象。 2)系统约束为理想约束。 3)主动力P 和Q 分别作用在B 点和A 点。 4)取A 点和B 点的无穷小真实位移为虚位移A y δ和B y δ。 5)建立虚位移和的关系。由几何关系得 ::A B y a y b δδ= 6)主动力的虚功为 0B A A P y Q y δδδ=-= 于是 B A y Pb Q P y a δδ== 4-2 图示机构的在C 处铰接,在D 点上作用水平力P ,已知AC =BC =EC =FC =DE =DF =l ,求保持 机构平衡的力Q 的值。 解:建立如图所示的坐标系,由几何关系得: θcos 2l y A =,θsin 3l x D = 由虚位移原理得: 0=+D A x P y Q δδ 所以: θPctg Q 2 3 = 4-4 反平行四边形机构ABCD 中的杆CD AB 、和BC 用铰链B 和C 互相连接,同时又用铰链A 和D 连在机架AD 上。在杆CD 的铰链C 处作用着水平力C F 。在铰链B 沿垂直于杆 AB 的方向作用有力B F ,机构在图示位置处于平衡。设AD BC =,AB CD =, ?=∠=∠90ADC ABC ,?=∠30DCB 。求B F 的大小。 解:根据题意,选三根杆组成的整体为研究对象,约束均为理想约束,主动力为B C F F 及。质系平衡,则由虚位移原理,有 0C C B B δδ+=F r F r g g 又由运动学知识, )(3/cos /1)/()/(11πδδ==B C B C v v r r 其中11B B v r 及δ是沿CB 杆方向的分量。 联立上述两式可得, C B F F 2= 4-5 滑套D 套在光滑直杆AB 上,并带动CD 杆在铅垂滑道上滑动,如图所示。已知当0θ=o 时,弹簧等于原长,且弹簧系数为5kN/m 。若系统的自重不计,求在任意位置θ角平衡时,在AB 杆上应加多大力偶矩M 。 第三章第1节支付结算概述 1.【多选题】支付结算是指单位、个人在社会经济活动中使用()等结算方式进行货币给付及资金清算的行为。 A.现金 B.票据 C.银行卡 D.汇兑 2.【多选题】下列各项中,属于支付结算时应遵循的原则有()。 A.恪守信用,履约付款原则 B.谁的钱进谁的账,由谁支配原则 C.银行不垫款原则 D.存款信息保密原则 3.【判断题】中国人民银行现代化支付系统中全国支票影像系统,是金融基础设施的核心系统。() 4.【多选题】根据支付结算法律制度的规定,下列非现金支付工具中,属于结算方式的有()。 A.票据 B.银行卡 C.汇兑 D.委托收款 5.【单选题】根据支付结算法律制度的规定,下列票据欺诈行为中,属于伪造票据的是()。 A.假冒出票人在票据上签章 B.涂改票据号码 C.对票据金额进行挖补篡改 D.修改票据密押 6.【单选题】某票据的出票日期为“2011年3月15日”,其规范写法是()。 A.贰零壹壹年零叁月壹拾伍日 B.贰零壹壹年叁月壹拾伍日 C.贰零壹壹年零叁月拾伍日 D.贰零壹壹年叁月拾伍日 7.【单选题】根据支付结算法律制度的规定,下列关于票据填写要求的表述中,不正确的是()。 A.单位名称应当记载全称或者规范化简称 B.银行名称应当记载全称或者规范化简称 C.出票日期可以选择使用中文大写或阿拉伯数码 D.金额以中文大写和阿拉伯数码同时记载,二者必须一致 8.【单选题】根据支付结算法律制度的规定,下列关于支付结算的要求中正确的是()。 A.单位和银行在票据上记载的名称可以是全称也可以是简称 B.个人在票据和结算凭证上的签章,必须为个人本人的签名加盖章 C.票据的出票金额、出票日期、付款人名称不得更改 D.伪造、变造票据属于欺诈行为,构成犯罪的应依法追究其刑事责任 9.【多选题】根据支付结算法律制度的规定,下列各项中,属于无效票据的有()。 A.更改出票金额的票据 B.更改出票日期及收款人名称的票据 ?补充习题 ? 1. 设关系模式 R=(U,F),U=ABCDEG,F={AB→D,DB→EG,AC→E,BE→A, A→B },求所有候选码。(AC,BCE,BCD) ? 2. 设关系模式R=(U,F),U=ABCDEG,求下列函数依赖集F等价的最小函数依赖集Fmin. ?(1)F={AB→CD,A→BE,D→E,B→D} 1.F1={AB->C,AB->D,A->B,A->E,D->E,B->D} 2.F2={AB->C,A->B, D->E,B->D} 3.Fmin={A->C,A->B,D->E,B->D} ?(2)F={ABC→D, AC→E, E→AB,B→D,CD→B} 1.F1={ABC→D, AC→E, E→A, E→B,B→D,CD→B} 2.F2={AC→E, E→A, E→B,B→D,CD→B} 3.Fmin={AC→E, E→A, E→B,B→D,CD→B} ?(3) F={AB→C,D→EG,C→A,BE→C,BC→D,CG→BD,ACD→B,C E→AG} 1.F1={AB→C,D→E,D->G,C→A,BE→C,BC→D, CG→B, CG→D,ACD→B,CE→A, CE→G} 2.F2={AB→C,D→E,D->G,C→A,BE→C, BC→D,CG->D,ACD→B, CE→G} 或者F2={AB→C,D→E,D->G,C→A,BE→C, BC→D,CG->B,CE→G} 3. {AB→C,D→E,D->G,C→A,BE→C,BC→D, CG->D,CD→B, CE→G}或者 {AB→C,D→E,D->G,C→A,BE→C,BC→D, CG->B,CD→B, CE→G} 第三章晶体结构与性质 第一节晶体常识 第一课时 教学内容分析: 本节内容是安排在原子结构、分子结构以及结构决定性质的内容之后来学习,对于学生的学习有一定的理论基础。本节内容主要是通过介绍各种各样的固体为出发点来过渡到本堂课的主题——晶体和非晶体。而晶体和非晶体的学习是以各自的自范性和微观结构比较为切入点,进而得出得到晶体的一般途径以及晶体的常见性质和区分晶体的方法。 教学目标设定: 1、通过实验探究理解晶体与非晶体的差异。 2、学会分析、理解、归纳和总结的逻辑思维方法,提高发现问题、分析问题和解决问题的能力。 3、了解区别晶体与非晶体的方法,认识化学的实用价值,增强学习化学的兴趣。 教学重难点: 1、晶体与非晶体的区别 2、晶体的特征 教学方法建议:探究法 教学过程设计: [新课引入]:前面我们讨论过原子结构、分子结构,对于化学键的形成也有了初步的了解,同时也知道组成千万种物质的质点可以是离子、原子或分子。又根据物质在不同温度和压强下,物质主要分为三态:气态、液态和固态,下面我们观察一些固态物质的图片。 [投影]:1、蜡状白磷;2、黄色的硫磺;3、紫黑色的碘;4、高锰酸钾 [讲述]:像上面这一类固体,有着自己有序的排列,我们把它们称为晶体;而像玻璃这一类 固体,本身原子排列杂乱无章,称它为非晶体,今天我们的课题就是一起来探究晶体与非晶体的有关知识。 [板书]:一、晶体与非晶体 [板书]:1、晶体与非晶体的本质差异 [提问]:在初中化学中,大家已学过晶体与非晶体,你知道它们之间有没有差异? [回答]:学生:晶体有固定熔点,而非晶体无固定熔点。 [讲解]:晶体有固定熔点,而非晶体无固定熔点,这只是晶体与非晶体的表观现象,那么他们在本质上有哪些差异呢? [投影]晶体与非晶体的本质差异 [板书]:自范性:晶体能自发性地呈现多面体外形的性质。 [解释]:所谓自范性即“自发”进行,但这里得注意,“自发”过程的实现仍需一定的条件。 例如:水能自发地从高处流向低处,但不打开拦截水流的闸门,水库里的水不能下泻。[板书]:注意:自范性需要一定的条件,其中最重要的条件是晶体的生长速率适当。 [投影]:通过影片播放出,同样是熔融态的二氧化硅,快速的冷却得到玛瑙,而缓慢冷却得到水晶过程。 [设问]:那么得到晶体的途径,除了用上述的冷却的方法,还有没有其它途径呢?你能列举哪些? [板书]:2、晶体形成的一段途径: 9-10 在瓦特行星传动机构中,平衡杆O 1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ;而曲柄OB 活动地装置在O 轴上,如图所示。在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一体。已知:r 1=r 2=0.33m ,O 1A =0.75m ,AB =1.5m ;又平衡杆的角速度ωO 1=6rad/s 。求当γ=60°且β=90°时,曲柄OB 和齿轮Ⅰ的角速度。 题9-10图 【知识要点】 Ⅰ、Ⅱ两轮运动相关性。 【解题分析】 本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。 【解答】 A 、B 、M 三点的速度分析如图所示,点C 为AB 杆的瞬心,故有 AB A O CA v A A B ??== 21ωω ωω?= ?=A O CD v AB B 12 3 所以 s rad r r v B OB /75.32 1=+= ω s rad r v CM v M AB M /6,1 == ?=I ωω 9-12 图示小型精压机的传动机构,OA =O 1B =r =0.1m ,EB =BD =AD =l =0.4m 。在图示瞬时,OA ⊥AD ,O 1B ⊥ED ,O 1D 在水平位置,OD 和EF 在铅直位置。已知曲柄OA 的转速n =120r/min ,求此时压头F 的速度。 题9-12图 【知识要点】 速度投影定理。 【解题分析】 由速度投影定理找到A 、D 两点速度的关系。再由D 、E 、F 三者关系,求F 速度。 【解答】 速度分析如图,杆ED 与AD 均为平面运动,点P 为杆ED 的速度瞬心,故 v F = v E = v D 由速度投影定理,有A D v v =?θcos 可得 s l l r n r v v A F /30.1602cos 2 2m =+??== πθ 9-16 曲柄OA 以恒定的角速度=2rad/s 绕轴O 转动,并借助连杆AB 驱动半径为r 的轮 子在半径为R 的圆弧槽中作无滑动的滚动。设OA =AB =R =2r =1m ,求图示瞬时点B 和点C 的速度与加速度。 题9-16图 【知识要点】 基点法求速度和加速度。 【解题速度】 分别对A 、B 运动分析,列出关于B 点和C 点的基点法加速度合成方程,代入已知数据库联立求解。 【解答】 轮子速度瞬心为P, AB 杆为瞬时平动,有 [习题4-4] 一力系由四个力组成,如图4-17所示。已知F 1=60N,F 2=400N,F 3=500N,F 4=200N,试将该力系向A点简化(图中长度单位为mm)。 解: 方向余弦: 4696.0877 .638300 cos == = ∑R x F F α 8553.0877 .63841 .546cos == = ∑R y F F β 2191.0877 .638140 cos -=-= =∑R z F F γ 主矢量计算表 主矩计算表 方向余弦: 6790.0831.162564 .110cos 0 -=-= = ∑M M x α 7370.0831.162120 cos 0 == = ∑M M y β 0831 .1620 cos 0 == = ∑M M z γ [习题4-6] 起重机如图4-19所示。已知AD =DB =1m,CD =1.5m,CM =1m;机身与平衡锤E 共重kN W 1001=,重力作用线在平面LMN ,到机身轴线的距离为0.5m;起重量kN W 302=。求当平面LMN 平行于AB 时,车轮对轨道的压力。 B N C N A N By R Bz R Bx R Ay R A T W D 解:因为起重机平衡,所以: 0)(=∑i AB F M 05.05.05.121=?+?+?-W W N C kN kN N C 3.43)(333.435.1/)5.0305.0100(≈=?+?= 0)(=∑i CD F M 045.01121=?-?+?-?W W N N A B 70=-A B N N (1) 0=∑iz F 021=--++W W N N N C B A 030100333.43=--++B A N N 667.86=+B A N N ………………(2) (1)+(2)得: 667.1562=A N kN kN N A 3.78)(334.78≈= kN kN N N A B 3.8)(333.8334.78667.86667.86≈=-=-= [习题4-11] 均质杆AB ,重W ,长l ,A 端靠在光滑墙面上并用一绳AC 系住,AC 平行于x轴, B 端用球铰连于水平面上。求杆A 、B 两端所受的力。图中长度单位为m 。 解: 0=∑iz F 0=-W R Bz W R Bz = 0)(=∑i x F M 第4章数据库安全性 1.什么是数据库的安全性? 答:数据库的安全性是指保护数据库以防止不合法的使用所造成的数据泄露、更改或破坏。 2.数据库安全性和计算机系统的安全性有什么关系? 答:安全性问题不是数据库系统所独有的,所有计算机系统都有这个问题。只是在数据库系统中大量数据集中存放,而且为许多最终用户直接共享,从而使安全性问题更为突出。系统安全保护措施是否有效是数据库系统的主要指标之一。 数据库的安全性和计算机系统的安全性,包括操作系统、网络系统的安全性是紧密联系、相互支持的。 CC评估保证级(EAL)的划分 4.试述实现数据库安全性控制的常用方法和技术。 答:实现数据库安全性控制的常用方法和技术有: 1)用户标识和鉴别:该方法由系统提供一定的方式让用户标识自己的名字或身份。每次用 户要求进入系统时,由系统进行核对,通过鉴定后才提供系统的使用权。 2)存取控制:通过用户权限定义和合法权检查确保只有合法权限的用户访问数据库,所有 未被授权的人员无法存取数据。例如CZ 级中的自主存取控制( DAC ) , Bl 级中的强制存取控制(MAC )。 3)视图机制:为不同的用户定义视图,通过视图机制把要保密的数据对无权存取的用户隐 藏起来,从而自动地对数据提供一定程度的安全保护。 4)审计:建立审计日志,把用户对数据库的所有操作自动记录下来放入审计日志中,DBA 可 以利用审计跟踪的信息,重现导致数据库现有状况的一系列事件,找出非法存取数据的人、时间和内容等。 5)数据加密:对存储和传输的数据进行加密处理,从而使得不知道解密算法的人无法获知 数据的内容。 5.什么是数据库中的自主存取控制方法和强制存取控制方法? 答:自主存取控制方法:定义各个用户对不同数据对象的存取权限。当用户对数据库访问时首先检查用户的存取权限。防止不合法用户对数据库的存取。 强制存取控制方法:每一个数据对象被(强制地)标以一定的密级,每一个用户也被(强制地)授予某一个级别的许可证。系统规定只有具有某一许可证级别的用户才能存取某一个密级的数据对象。 6.对下列两个关系模式使用GRANT语句完成下列授权功能: 学生(学号,姓名,年龄,性别,家庭住址,班级号) 班级(班级号,班级名,班主任,班长) 1)授予用户U1对两个表的所有权限,并可给其他用户授权。 GRANT ALL PRIVILEGES ON TABLE学生,班级 TO U1 WITH GRANT OPTION ; 2)授予用户U2对学生表具有查看权限,对家庭住址具有更新权限。 GRANT SELECT,UPDATE(家庭住址) ON TABLE学生 TO U2; 3)将对班级表查看权限授予所有用户。 GRANT SELECT ON TABLE 班级 TO PUBLIC; 4)将对学生表的查询、更新权限授予角色R1。 CREATE ROLE R1; GRANT SELECT,UPDATE ON TABLE 学生 TO R1; 5)将角色R1授予用户U1,并且U1可继续授予给其他角色。 GRANT R1 TO U1 WITH ADMIN OPTION;称,MAX(工资),MIN(工资),AVG(工资) FROM 职工,部门 WHERE 职工.部门号=部门.部门号 GROUP BY 职工.部门号; GRANT SELECT ON 部门工资 TO 杨兰; 7.针对习题7 中1)~7)的每一种情况,撤销各用户所授予的权限。 1)REVOKE SELECT ON TABLE职工,部门 FROM 王明; 2)REVOKE INSERT , DELETE ON TABLE职工,部门 FROM 李勇; 3)REOVKE SELECT ON TABLE职工WHEN USER ( ) =NAMEFROM ALI; 4)REVOKE SELECT , UPDATE ON TABLE职工FROM 刘星; 5)REVOKE ALTER TABLE ON TABLE职工,部门FROM 张新; 6)REVOKE ALL PRIVILIGES ON TABLE职工,部门FROM 周平; 《理论力学》第四章作业参考答案 习题 4-1 解: 以棒料为研究对象,所受的力有重力P 、力偶M ,与V 型槽接触处的法向 约束力1N F 、2N F 和摩擦力1S F 、2S F ,且摩擦力的方向与棒料转动方向相反,如图所示。建立坐标系,列平衡方程: ?? ?? ???===∑∑∑0 )(00F M F F O y x ?? ???=-+=--=-+0 125.0125.00 45sin 0 45cos 210 12021M F F P F F P F F S S S N S N 临界条件下,补充方程: 11N S S F f F = 22N S S F f F = 联立以上各式得: 223.01=s f 491.42=s f (忽略) 答:棒料与V 型槽间的静摩擦因数223.0=s f 。 习题4-6 解法一: (1)取整体为研究对象,作用力有重力P 、提砖力F ,列平衡方程: 0=-P F 所以 )(120N F = (2)取砖块为研究对象,其受力情况如图所示:作用力有重力P 、法向约束 力NA F 、ND F 和摩擦力SA F 、SD F ,由于其滑动趋势向下,所以其摩擦力的方向向上。列平衡方程: ∑=0)(F M D 0250125=-SA F P 补充方程: NA S SA F f F ≤ 所以 )(60N F SA = )(160N F NA ≥ (3)取构件AGB 为研究对象,所受的力除提砖力F 外,还有砖块对其作用的 正压力NA F ' 、摩擦力SA F ' , G 点的约束力G X F 、G Y F 。列平衡方程: ∑=0)(F M G 03095='-'+NA SA F b F F 其中NA F ' 与砖块所受的力NA F 、SA F ' 与砖块所受的力SA F 分别为作用力与反作用力关系,将各力的数值代入得 《数据库程序设计》第04章在线测试 剩余时间: 59:38 答题须知:1、本卷满分20分。 2、答完题后,请一定要单击下面的“交卷”按钮交卷,否则无法记录本试卷的成绩。 3、在交卷之前,不要刷新本网页,否则你的答题结果将会被清空。 第一题、单项选择题(每题1分,5道题共5分) 1、在建立“教学信息管理数据库”时,将学生信息和教师信息分开,保存在不同的表中的原因是( )。 A 、避免字段太多,表太大 B 、便于确定主键 C 、当删除某一学生信息时,不会影响教师信息,反之亦然 D 、以上都不是 2、下列关于Access 数据库描述中错误的是( ) A 、由多个表组成 B 、数据库对象包括表、查询、窗体、报表、宏、模块等 C 、数据库对象放在不同的文件中 D 、是关系数据库 3、下列叙述中正确的是( ) A 、数据库系统是一个独立的系统,不需要操作系统的支持 B 、数据库设计是设计数据库管理系统 C 、数据库技术的根本目标是要解决数据共享的问题 D 、数据库系统中,数据的物理结构必须与逻辑结构 一致。 4、把E-R 图转换成关系模型的过程属于数据库设计的( ) A 、概念设计 B 、逻辑设计 C 、需求分析 D 、物理设计 5、关系R (班级号,班主任,学号)可以分解为( )是正确的 A 、关系R1(班级号,学号)和关系R2(班主任,学号) B 、关系R1(班级号,学号) 和关系R3(班级号, 班主任) C 、关系R2(班主任,学号)和关系R3(班级号,班主任) D 、上述都可以 第二题、多项选择题(每题2分,5道题共10分) 1、(本题空白。您可以直接获得本题的2分) 2、(本题空白。您可以直接获得本题的2分) (b) 第2篇 工程运动学基础 第4章 运动分析基础 4-1 小环A 套在光滑的钢丝圈上运动,钢丝圈半径为R (如图所示)。已知小环的初速度为v 0,并且在运动过程中小环的速度和加速度成定角θ,且 0 < θ <2 π,试确定小环 A 的运动规律。 解:R v a a 2 n sin ==θ,θ sin 2R v a = θ θtan cos d d 2t R v a t v a = ==,??=t v v t R v v 02d tan 1d 0θ t v R R v t s v 00tan tan d d -==θθ ??-=t s t t v R R v s 0000d tan tan d θθ t v R R R s 0tan tan ln tan -=θθθ 4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的 1.?? ???-=-=225.1324t t y t t x , 2.???==t y t x 2cos 2sin 3 解:1.由已知得 3x = 4y (1) ? ??-=-=t y t x 3344 t v 55-= ? ??-=-=34y x 5-=a 为匀减速直线运动,轨迹如图(a ),其v 、a 图像从略。 2.由已知,得 2arccos 21 3arcsin y x = 化简得轨迹方程:29 4 2x y -= (2) 轨迹如图(b ),其v 、a 图像从略。 4-3 点作圆周运动,孤坐标的原点在O 点,顺钟向为孤坐标的正方向,运动方程为 22 1 Rt s π=,式中s 以厘米计,t 以秒计。轨迹图形和直角坐标的关系如右图所示。当点第一次到达y 坐标值最大的位置时,求点的加速度在x 和y 轴上的投影。 解:Rt s v π== ,R v a π== t ,222 n Rt R v a π== y 坐标值最大的位置时:R Rt s 2 212ππ== ,12=∴t R a a x π==t ,R a y 2π-= A 习题4-1图 习题4-2图 习题4-3图 第3章第1节教案 第三章、职业道德行为养成 第一节职业道德行为养成及其作用 新疆克拉玛依职业技术学院郑志刚教学目标 通过教学让学生了解职业道德行为的养成;理解职业道德行为的重要性。教育学生加强职业道德修养,使学生明确职业道德行为养成的重要性。 教学重点、疑难点 “职业道德行为养成的内涵”既是难点,也是重点;同时"职业道德行为养成的作用"是我们学习第三章的重点。 教学使用工具 多媒体等。 教学内容及过程安排 进行理论分析,联系社会生活实际的典型事例来说明职业道德行为养成理论。 (1)概述本节课所要学习的内容,板书名人名言,梁启超的:“道德者,行也,而非言也”。置黑板顶端。板书"第三章职业道德行为养成"简要概括第三章所要讲述的主要内容。引言,在我们的生活中,许多人言行一致,心口如一,忠实履行自己的承诺,为人们所尊敬;有些人言行不一, 是语言上的巨人,行动的矮子,为人们所鄙夷。了解职业道德还是不够的,还要形成习惯。那么什么是职业道德行为养成呢? (2)多媒体播放典型故事《北宋清官包拯》,伴《包青天》主题歌,字幕弹出。内容是: 人民只要说起中国历史上的清官,马上会想到北宋时期的包拯。包拯生活的时代离现在有近千年,而今天的中国人依然怀念着他,依然到处流传着有关他的故事,戏剧舞台上依然在演出着描写他的动人事迹的《铡美案》、《赤桑镇》。这说明了对于那些在历史上曾经为人民做过一些好事的人,人民是不会忘记他的。包拯之所以能够成为千古传颂的传奇人物,与他从青少年时代起就注重道德的修养有关。临终,他立下遗嘱:子孙后代有为官而贪赃枉法者,死后不准埋入包氏族墓,不承认其为自己的后代。包拯年轻时"金榜题名",在开始走向为官之路的时候,有诗一首,其诗如下: 清心为治本,直道是身谋。 秀干终成栋,精钢不做钩, 仓充雀鼠喜,草尽狐兔愁。 理论力学思考题答案 1-1 (1)若F 1=F 2表示力,则一般只说明两个力大小相等,方向相同。 (2)若F 1=F 2表示力,则一般只说明两个力大小相等,方向是否相同,难以判定。 (3)说明两个力大小、方向、作用效果均相同。 1-2 前者为两个矢量相加,后者为两个代数量相加。 1-3 (1)B 处应为拉力,A 处力的方向不对。 (2)C 、B 处力方向不对,A 处力的指向反了。 (3)A 处力的方向不对,本题不属于三力汇交问题。 (4)A 、B 处力的方向不对。 1-4 不能。因为在B 点加和力F 等值反向的力会形成力偶。 1-5 不能平衡。沿着AB 的方向。 1-7 提示:单独画销钉受力图,力F 作用在销钉上;若销钉属于AC ,则力F 作用在AC 上。受力图略。 2-1 根据电线所受力的三角形可得结论。 2-2不同。 2-3(a )图和(b )图中B 处约束力相同,其余不同。 2-4(a )力偶由螺杆上的摩擦力和法向力的水平分力形成的力偶平衡,螺杆上的摩擦力与法向力的铅直方向的分力与N F 平衡。 (b )重力P 与O 处的约束力构成力偶与M 平衡。 2-5可能是一个力和平衡。 2-6可能是一个力;不可能是一个力偶;可能是一个力和一个力偶。 2-7一个力偶或平衡。 2-8(1)不可能;(2)可能;(3)可能;(4)可能;(5)不可能;(6)不可能。 2-9主矢:''RC RA F F =,平行于BO ;主矩: '2C RA M aF =,顺时针。 2-10正确:B ;不正确:A ,C ,D 。 2-11提示:OA 部分相当一个二力构件,A 处约束力应沿OA ,从右段可以判别B 处约束力应平行于DE 。 3-1 牛顿第一定律的教案示例 一、教学目标 1.在物理知识方面学习牛顿第一定律的内容,正确理解力跟物体运动的关系,掌握惯性的概念. 2.对客观事物的正确认识需要人们经过由表及里,由片面到全面长时间的认识过程.通过本节的学习要让学生建立起正确的认识论的观点,同时体会到人们认识世界的长期性和艰巨性. 3.物理实验是科学研究的方法,对实际问题做出合理的抽象,进行理想实验的研究正是伽利略得到力与物体运动正确关系的基础.我们要学习这种科学抽象的方法,并把它用到今后的物理研究中去. 二、重点、难点分析 1.本节的重点是正确认识物体运动跟力的关系,在物体不受力的情况下,应保持匀速直线运动状态或静止状态.通过对牛顿第一定律的学习,加深对惯性概念的理解.2.生活常识使人们对力和运动的关系形成了不正确的认识,通过教学要让学生们克服传统观念,形成正确的认识,需要下一定的功夫. 三、教具 1.说明伽利略理想实验的装置,自制导轨和小球. 2.说明物体在不受阻力下做匀速直线运动的气垫导轨和滑块. 3.演示惯性的小车和木块. 四、主要教学过程 (一)引入新课 介绍本章的地位:在第一章我们学习了物体在静止或匀速直线运动状态下的受力问题,这时物体处于平衡状态,所受的力为平衡力.这部分内容在物理学中叫做静力学. 第二章研究了物体在直线上的运动,包括匀速运动和变速运动.在变速运动中重点讨论了匀变速直线运动.这部分内容在物体学中属于运动学. 在前边两章知识的基础上,我们在第三章里来研究运动和力的关系.这部分知识的基础是牛顿第一定律和第二定律.这部分内容在物理中属于动力学. 学习动力学的知识后,可以在知道物体受力情况后确定物体的运动状态;在知道物体的运动状态的情况下,可以确定它的受力情况.动力学的知识在科学研究和生产实际中有着非常广泛的应用,如研究交通工具的速度问题,天体的运动问题等.我们从牛顿第一定律开始. (二)教学过程设计 板书:一、牛顿第一定律 实验:在桌上放着一本物理书,它是静止的,怎样才能让它运动起来呢?要用力去推它.从这个例子可以看出物体要运动,需要对它施加力的作用.力是使物体运动的原因吗? 这是一个运动和力的关系问题.这个问题在2000多年前人们就对它进行了研究,下面我们来回顾一下历史. 1.历史的回顾 第四章练习题 一、选择题 1.设计性能较优的关系模式称为规范化,规范化主要的理论依据是。 A.关系规范化理论 B.关系运算理论 C.关系代数理论 D.数理逻辑 答案:A 2.规范化理论是关系数据库进行逻辑设计的理论依据。根据这个理论,关系数据库中的关系必须满足:其每一属性都是。 A.互不相关的 B.不可分解的 C.长度可变的 D.互相关联的 答案:B 3.关系数据库规范化是为解决关系数据库中问题而引入的。 A.插入、删除和数据冗余 B.提高查询速度 C.减少数据操作的复杂性 D.保证数据的安全性和完整性 答案:A 4.当关系模式R(A,B)已属于3NF,下列说法中是正确的。 A.它一定消除了插入和删除异常B.仍可能存在一定的插入和删除异常 C.一定属于BCNF D.A和C都是 答案:B 5. 关系模式中2NF是指_______。 A.满足1NF且不存在非主属性对关键字的传递依赖现象 B.满足1NF且不存在非主属性对关键字部分依赖现象 C.满足1NF且不存在非主属性 D.满足1NF且不存在组合属性 答案:B 6. 关系模式中3NF是指___________。 A.满足2NF且不存在非主属性对关键字的传递依赖现象 B.满足2NF且不存在非主属性对关键字部分依赖现象 C.满足2NF且不存在非主属性 D.满足2NF且不存在组合属性 答案:A 7.关系模型中的关系模式至少是。 A.1NF B.2NF C.3NF D.BCNF 答案:A 8.在关系模式中,如果属性A和B存在1对1的联系,则说。 A.A→B B.B→A C.A←→B D.以上都不是 答案:C 9.若关系模式R∈1NF,且R中若存在X→Y,则X必含关键字,称该模式_______。 A.满足3NF B.满足BCNF C.满足2NF D.满足1NF 答案:B 10.消除了部分函数依赖的1NF的关系模式,必定是。 A.1NF B.2NF C.3NF D.BCNF 答案:B 11.候选关键字中的属性可以有。 A.0个 B.1个 C.1个或多个 D.多个 答案:C 12.设某关系模式S(SNO,CNO,G,TN,D),其中SNO表示学号,CNO表示课程号, 第四章 ^=_^= 习题4—1.用图示三脚架ABC 刖绞车E 从矿井中吊起重30kN 的30的重物,△ ABC 为 等边三角形,三脚架的三只脚及绳索 DE 均与水平面成60°角, 不记架重;求当重物被匀速吊起时各叫所受的力。 解:铰链D 为研究对象,坐标系如图示,受力分析为一空间汇交力系, O 为D 在 水平面上的投影。 平衡方程为: F 噩 ? cos^O'' -cosl20"十 F^t ? COS1205 - cos60 —备-cos 60° 十為-COS6C 0 = 0 工z = 0 弘=F 肋 -F 枢-cos30° -爲 ? cos30° 十 ■ cos30° + - cos 30° - G= Q 习题4 —2.重物M放在光滑的斜面上,用沿斜面的绳AM与BM拉住。已知物重W=1000N斜面的倾角a =60°,绳与铅垂面的夹角分别为B =30°和丫=60°。如 物体尺寸忽略不记,求重物对于斜面的压力和两绳的拉力。 解:重物M为研究对象,坐标系如图示,受力分析为一空间汇交力系,平衡方程为:丫* = 0 ^-G-cos30°^od200 =0 = 0 co^30° cod50°=0 ^Z = 0 JV-G cos60° =0 A JV = 500JV T A=750N T S= 4332V 习题4 —3.起重机装在三轮小车ABC上,机身重G=100kN重力作用线在平面LMNF 之内,至机身轴线MN的距离为;已知AD=DB=1mCD= CM=1m求当载重 P=30kN起重机的平面LMN平行于AB时,车轮对轨迹的压力。 I.* 4* /V介 解:起重机为研究对象,坐标系如图示,受力为一空间平行力系,平衡方程为: 乞2=0 N A + TV启十科匚一&一卩=0 ?(N A+N3)-MD = O 刀敝工=0 -N C =0 行走-珂总 DB-G Q.5m^ P■ 4m = 0 一、选择题 、B、C三种饱和醇的混合物,分为两等分:一份与足量的金属钠反应,共产生a molH 2;另一份完全燃烧后生成2a molCO 2 .则该混合醇中不可能含有() A.甲醇 B.乙醇 C.乙二醇 D.丙三醇2.既能发生分子内脱水生成烯,又能催化氧化且产物为的醇是()A.B. C.D. 3.下列物质中既属于芳香族化合物又属于醇的是() A.B. C.D.CH 3CH 2 OH 4.已知:将乙醇和浓硫酸反应的温度控制在140℃,乙醇会发生分子间脱水,并 生成乙醚,其反应方程式为,用浓硫酸与分子式分别为C 2H 6 O和C 3 H 8 O的醇的混合 液反应,可以得到醚的种类有() A.1种 B.3种 C.5种 D.6种 5.组成为CH 4O和C 3 H 8 O的混合醇,在一定条件下进行脱水反应,最多能生成的有 机物的种数为() A.5种 B.6种 C.7种 D.8种 6.某醇C 5H 11 OH发生消去反应时,可以得到两种烯烃,又可发生催化氧化,则该 醇的结构简式可能为() A.B. C.D. 7.某有机物的结构为下图所示,这种有机物不可能具有的性质是() ①可以燃烧;②能使酸性KMnO 4 溶液褪色;③能跟NaOH溶液反应; ④能发生酯化反应;⑤能发生加聚反应;⑥能发生水解反应 A.①④ B.只有⑥ C.只有⑤ D.④⑥ 8.甲、乙、丙三种醇与足量的金属钠完全反应,在相同条件下产生相同体积的氢气,消耗这种醇的物质的量之比为3:6:2,则甲、乙、丙三种醇分子里羟基个数之比为() A.3:1:2 B.3:2:1 C.2:6:3 D.2:1:3 9.能证明苯酚有酸性的事实是() A.苯酚能与金属钠反应放出氢气 B.苯酚能与NaOH溶液反应生成苯酚钠和水 C.苯酚钠水溶液里通入过量CO 2气体有苯酚析出,同时生成Na 2 CO 3 D.苯酚与饱和溴水反应生成白色沉淀 10.己烯雌酚是一种激素类药物,结构如图。下列有关叙述中不正确的是() A.它易溶于有机溶剂 B.可使酸性高锰酸钾溶液褪色 C.1mol该有机物能够与7mol H 2 发生加成反应 D.该有机物分子中,一定有14个碳原子共平面 二、非选择题 11.已知乙烯能发生以下转化 (1)工业制取乙烯的原料为______________; (2)写出B、D化合物中官能团:B中含官能团________;D中含官能团________;(3)写出反应的化学方程式及反应类型: ①____________________________反应类型______________ ②____________________________反应类型______________ ③____________________________反应类型______________ (4)若工业上用空气代替氧气进行反应②,主要优点是________,缺点是_____。 《数据库程序设计》第04章在线测试 A B C D 、有文件名为p1.prg , A B C D 、若有命令:a1= A B C D 、若有命令:m=5 x A B C D 、在执行循环体时,如果需要退出循环,转去执行循环体后面的语句,需要在该处添加的语句为: A B C D D、过程 E、可以命名的程序段 2、下列说法正确的是: A、过程既可以和主程序在同一个文件中,也可以不在同一个文件中。 B、函数既可以和主程序在同一个文件中,也可以不在同一个文件中。 C、子程序既可以和主程序在同一个文件中,也可以不在同一个文件中。 D、子程序具有接受参数和回送参数的双重功能。 E、函数具有接受参数和回送参数的双重功能。 F、过程具有接受参数和回送参数的双重功能。 3、编译系统不能检查出来的错误是: A、命令字拼写错误 B、命令格式写错 C、处理逻辑有错 D、计算步骤出错 E、超出系统允许范围 F、数据类型不匹配 G、操作文件不存在 4、结构化程序设计的特点是: A、程序中只有三种基本结构:顺序结构,分支结构,循环结构 B、程序的每个模块只有一个入口和一个出口 C、遵循模块化原则 D、可以采用自顶向下的设计方法 E、可以采用自底向上的设计方法 5、要实现对表的扫描循环,可以使用的语句为: 正确错误 、过程既可以和主程序在同一个文件中,也可以不在同一个文件中。 正确错误 、函数既可以和主程序在同一个文件中,也可以不在同一个文件中。 正确错误 、循环体中若有loop语句,则执行到该句时,能使执行转向循环语句头部继续循环。 正确错误 、循环体中若有exit语句,则执行到该句时,能使执行转向循环语句头部继续循环。 正确错误 第四章 习题4-1.用图示三脚架ABCD和绞车E从矿井中吊起重30kN的30的重物,△ABC为等边三角形,三脚架的三只脚及绳索DE均与水平面成60o角,不记架重;求当重物被匀速吊起时各叫所受的力。 解:铰链D为研究对象,坐标系如图示,受力分析为一空间汇交力系,O为D在水平面上的投影。 平衡方程为: 习题4-2.重物M放在光滑的斜面上,用沿斜面的绳AM与BM拉住。已知物重W=1000N,斜面的倾角α=60o,绳与铅垂面的夹角分别为 β=30o和γ=60o。如物体尺寸忽略不记,求重物对于斜面的压力和两 绳的拉力。 解:重物M为研究对象,坐标系如图示,受力分析为一空间汇交力系,平衡方程为: 习题4-3.起重机装在三轮小车ABC上,机身重G=100kN,重力作用线在平面LMNF之内,至机身轴线MN的距离为;已知AD=DB=1m,CD=, CM=1m;求当载重P=30kN,起重机的平面LMN平行于AB时,车轮对轨 迹的压力。 解:起重机为研究对象,坐标系如图示,受力为一空间平行力系,平衡方程为: 习题4-4.水平轴上装有两个凸轮,凸轮上分别作用已知P力=800N和未知力F;如轴平衡,求力F和轴承反力。 解:取凸轮与轴为研究对象,坐标系如图示,受力分析为一空间任意力系,平衡方程为: 习题4-5.水平轴上装有两个带轮C和D,轮的半径r 1 =20cm, r 2=25cm,轮C的胶带是水平的,共拉力T 1 =2t 1 =5000N,轮D的胶带与 铅垂线成角α=30o,其拉力T 2=2t 2 ;不计轮、轴的重量,求在平衡情况 下拉力T 2和t 2 的大小及轴承反力。 高中物理学习材料 金戈铁骑整理制作 第三章磁场 第1节磁现象和磁场 1.磁体吸引铁质物体的性质叫磁性,具有磁性的物体叫磁体,磁体的各部分磁性强弱不同,磁性最强的区域叫磁极. 2.奥斯特实验是将导线沿南北方向放置在磁针的上方,通电时磁针发生了转动.此实验说明电流周围存在磁场. 3.磁体与磁体之间、磁体与通电导体之间、通电导体与通电导体之间的相互作用都是通过磁场发生的. 4.(1)地球本身是一个大磁体,它的N极位于地理南极附近,S极位于地理北极附近. (2)地球的地理两极与地磁两极并不重合,磁针的指向与南北方向有一个夹角,这个夹角称做磁偏角 5.发现电流周围存在磁场的物理学家是() A.奥斯特B.焦耳C.张衡D.安培 答案 A 6.下列关于磁场的说法正确的是() A.磁场最基本的性质是对处于其中的磁体和电流有力的作用 B.磁场是看不见、摸不着、实际不存在的,是人们假想出来的一种物质 C.磁场是客观存在的一种特殊的物质形态 D.磁场的存在与否决定于人的思想,想其有则有,想其无则无 答案AC 解析磁场虽看不见、摸不着,但其是客观存在的,不随人的意志而转移,它是一种特殊的物质形态,最基本的性质是对处于其中的磁体和电流有力的作用. 7.磁体与磁体间、磁体与电流间、电流与电流间的相互作用的示意图,以下正确的是() A.磁体?磁场?磁体 B.磁体?磁场?电流 C.电流?电场?电流 D.电流?磁场?电流 答案ABD 解析磁体与磁体间、磁体与电流间、电流与电流间的相互作用都是通过磁场来传递的. 【概念规律练】 知识点一磁场 1.以下说法中正确的是() A.磁极与磁极间的相互作用是通过磁场产生的 B.电流与电流间的相互作用是通过电场产生的 C.磁体与电流间的相互作用是通过电场与磁场而共同产生的 D.磁场和电场是同一种物质 答案 A 解析电流能产生磁场,在电流的周围就有磁场存在,不论是磁极与磁极间还是电流与电流间、磁体与电流间,都有相互作用的磁场力.磁场是磁现象中的一种特殊物质,它的基本性质是对放入磁场中的磁体、电流有磁场力的作用;而电场是电荷周围存在的一种特殊物质,其最基本的性质是对放入电场中的电荷有电场力的作用,它不会对放入静电场中的磁体产生力的作用,因此,磁场和电场是两种不同的物质,各自具有其自身的特点.所以只有A 正确. 点评一切磁现象都是通过磁场产生的,由于电流周围存在磁场,所以电流与电流之间、电流与磁体之间的作用也是磁现象. 2.下列说法中正确的是() A.只有磁铁周围才有磁场 B.电荷的周围一定有电场和磁场 C.永久磁铁的磁场与电流周围的磁场是两种不同的磁场 D.电流能产生磁场说明电和磁是有联系的 答案 D 解析磁铁和电流周围都有磁场且性质相同,而电流是电荷定向移动形成的.所以,运动电荷周围既有电场又有磁场,静止电荷周围只有电场,A、B、C不对,电流产生磁场就是电和磁有关的证明,所以D对. 知识点二奥斯特实验 3.在做“奥斯特实验”时,下列操作中现象最明显的是() A.沿电流方向放置磁针,使磁针在导线的延长线上 B.沿电流方向放置磁针,使磁针在导线的正下方 C.导线沿南北方向放置在磁针的正上方 D.导线沿东西方向放置在磁针的正上方 答案 C 解析把导线沿南北方向放置在地磁场中处于静止状态的磁针的正上方.通电时磁针发生明显的偏转,是由于南北方向放置的通电导线的正下方的磁场恰好是东西方向.正确选项为C. 点评(1)注意“奥斯特实验”的细节问题,导线东西放置或将磁针放在导线的延长线上都不一定能观察到磁针的偏转. (2)观察小磁针是否发生偏转时,应避免与地磁场引起的磁针偏转相重合. 4.奥斯特实验说明了() A.磁场的存在B.磁场的方向性 C.电流可以产生磁场D.磁场间有相互作用 答案 C 解析奥斯特实验中电流能使静止的小磁针发生偏转,说明电流周围能产生磁场.故正确答案为C. 知识点三地磁场 5.关于地磁场,下列叙述正确的是() A.地球的地磁两极与地理的两极重合 B.我们用指南针确定方向,指南的一极是指南针的南极 C.地磁的北极与地理南极重合 D.地磁的北极在地理南极附近 答案BD 解析地球是一个大磁体,其磁北极(N极)在地理南极附近,磁南极(S极)在地理北极附近,并不重合.指南针指南的一端应该是磁针的南极(S极).选项B、D正确.理论力学练习题参考答案
理力答案_第四章
第三章 第1节 支付结算概述(习题+答案)
数据库系统概论第4章补充练习答案
新课标(人教版)高中化学选修3第3章第1节教案
理论力学第七版答案 第九章
《理论力学》第四章作业答案
数据库系统概论第5版课后答案第4章数据库安全性
理论力学答案第四章
《数据库程序设计》第04章在线测试
清华大学版理论力学课后习题答案大全 第4章运动分析基础
第3章第1节教案
理论力学(第七版)思考题答案
高一物理最新教案-第03章第01节惯性教案13 精品
数据库第四章练习题答案
理论力学课后答案4
人教版高中化学选修5第三章第1节练习题
《数据库程序设计》第04章在线测试
理论力学课后答案4
人教版高中物理选修3-1第三章第1节
- 第4章数据库安全性
- 数据库系统概论第5版课后答案第4章数据库安全性
- 《数据库原理与应用》第04章在线测试
- (完整版)《数据库》第4章习题答案
- 数据库 第四章
- 数据库第四章练习题答案
- 数据库 第04章 创建数据类型和表
- 数据库 第4章 数据库完整性练习题及答案
- 数据库原理与应用第04章在线测试
- 《数据库原理与应用》第04章在线测试
- 《数据库原理与应用》第04章在线测试
- 数据库基础第04章查询
- 《数据库》第4章习题答案
- 数据库第4章数据库完整性练习题及答案
- 华中科技大学数据库课件第04章 数据库安全
- 数据库第4章习题答案
- 《数据库应用技术》第04章在线测试
- 第04章_数据库 单表检索
- 数据库系统概论第4章补充练习答案
- 《数据库程序设计》第04章在线测试