非接触式掌纹图像采集光源的设计
红外线测距仪测量原理
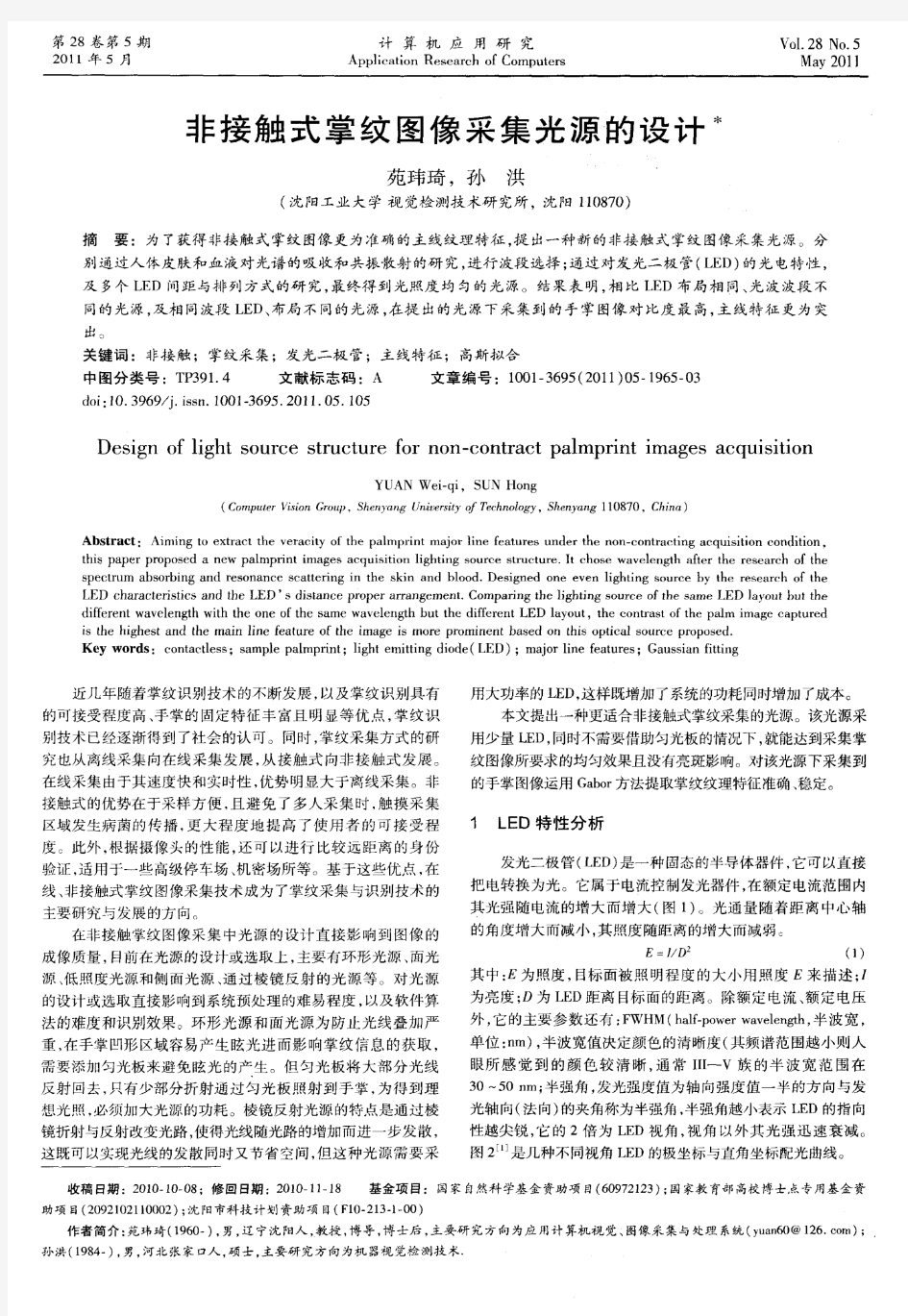
红外线测距仪测量原理 测距仪是一种航迹推算仪器,用于测量目标距离,进行航迹推算。测距仪的形式很多,通常是一个长形圆筒,由物镜、目镜、测距转钮组成,用来测定目标距离。测距仪是根据光学、声学和电磁波学原理设计的,用于距离测量的仪器。 红外测距仪的分类有激光红外,红外和超声波三种,目前测距仪主要是指的激光红外测距仪,红外测距仪和超声波测距仪由于测量距离有限,测量精度很低目前已经被淘汰。激光红外测距仪是利用激光对目标的距离进行准确测定的仪器。激光红外测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 测距仪有测量距离和测量精度,同时又是电子设备,所以品牌的选择非常重要,国际知名品牌的测距仪,在性能上会远优于杂牌的激光红外测距仪。 一.测距仪分类 测距仪从测距基本原理,可以分为以下三类: 1. 激光测距仪 激光测距仪是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 激光测距仪是目前使用最为广泛的测距仪,激光测距仪又可以分类为手持式激光测距仪(测量距离0-300米),望远镜激光测距仪(测量距离500-20000米)。 目前市面上主流的都是激光测距仪,手持式激光测距仪全球前两大品牌是徕卡和博世,右图就是一款主流的手持式激光测距仪。 望远镜激光测距仪,为远距离激光测距仪,目前在户外使用相当广泛,望远镜激光测距仪全球前四大品牌是图雅得、博士能、奥尔法和尼康。四个品牌在产品上各有特点,2013年,美国激光技术杂志公布的数据,2013年全球单品销售冠军是图雅得SP1500,这款测距仪测量精准,反应速度快捷。 2. 超声波测距仪
房屋建筑装饰装修施工组织设计方案
目录 一、工程概况 二、施工组织机构 三、施工方案 四、施工布置 五、质量控制措施 六、施工进度计划及工期 七、劳动力安排 八、主要施工机械配备 九、安全文明施工措施 十、人工工资保证措施 十一、竣工验收 附表: 1、单位工程施工进度计划表 2、施工总平面布置图 3、劳动力组织一览表 4、主要进场机械设备一览表
一、工程概况 (一)工程简述 1、建设单位:蓬溪县公安局 2、工程名称:蓬溪县公安局玉泉派出所办公楼装修工程 3、建设地点:蓬溪县城南新区 4、工期要求:总工期120天(拟定于2009年3月1日开工,2009年4月25日星期六竣工) 5、质量目标:符合国家现行《工程施工质量验收规范》质量标准 6、资金来源:国家资金和单位自筹资金 7、承包范围:比选人提供的《施工设计图纸》及《工程 清单》 该施工组织设计以绿城装饰设计的图纸为依据。 (二)工程概况 本工程位于蓬溪县城南新区,本次改造装修为两层办公楼。 本工程的主要装饰内容为:办公楼以及相关配套的专业安装项目。 本工程拟用的主要材料:块料楼地面、黑色大理石墙砖、 玻化砖、石材楼地面、兰色墙裙砖、黑胡桃饰面板、全玻 地弹门、木制装饰门等。 工程天棚采用轻钢龙骨石膏板吊顶等。 (三)工程范围 1、室内装饰施工工程 2、电气照明系统施工安装工程 3、建筑垃圾清运工作 (四)施工条件 原有装饰需经拆除方能装修,水电到位,道路畅通, 材料进场便利,施工条件良好。 (五)质量要求 要使该工程达到设计效果和一流质量,确保提供高雅、优美、舒适、方便、安全的环境,为此,我公司将按招标文件的要求,分别从施工技术方案及措施,施工进度计划、质量、安全、文明施工保证措施,主要施工机械及施工力量配备,施工组织管理体系及保证体系,工程管理、协调、配合施工措施,竣工后保养服务等方面进行施
基于局部纹理特征的三维掌纹识别研究
第41卷第12期 光电工程V ol.41, No.12 2014年12月Opto-Electronic Engineering Dec, 2014 文章编号:1003-501X(2014)12-0053-07 基于局部纹理特征的三维掌纹识别研究 杨 冰1,王小华1,2,杨鑫3 ( 1. 杭州电子科技大学认知与智能计算研究所, 杭州 310018; 2. 中国计量学院, 杭州 310018; 3. 大连理工大学计算机科学与技术学院, 辽宁大连 116023 ) 摘要:近年来,自动掌纹识别方法的研究吸引了越来越多的关注,已有的工作主要集中于二维掌纹识别。然而,二维掌纹图像存在着易伪造、抗噪能力差的缺陷,实际应用中会带来潜在的安全隐患。因此,三维掌纹识别被视为一种可行的解决方案来进一步提高识别的性能。基于局部纹理特征,本文提出一种有效的三维掌纹识别方法。 该方法首先利用形状指数来描述三维掌纹的局部几何特征,接着提取形状指数图像的局部三值模式以及Gabor小波特征,最后在匹配分数层次上对这两种互补的局部纹理特征进行融合,随后的实验证明了融合特征较单独特征要好。在香港理工三维掌纹数据库上的实验结果表明,本文方法在识别率上要优于目前流行的其它三维掌纹识别方法,从而验证了本文方法的有效性。 关键词:三维掌纹识别;局部纹理特征;形状指数;多重特征融合 中图分类号:TP391.4 文献标志码:A doi:10.3969/j.issn.1003-501X.2014.12.010 3D Palmprint Recognition Based on Local Texture Feature Sets YANG Bing1,WANG Xiaohua1,2,YANG Xin3 ( 1. Institute of Cognitive and Intelligent Computing, Hangzhou Dianzi University, Hangzhou 310018, China; 2. China Jiliang University, Hangzhou 310018, China; 3. Computer Science and Technology College, Dalian University of Technology, Dalian 116023, Liaoning Province, China ) Abstract: Recent years have witnessed a growing interest in developing automatic palmprint recognition methods. Most of the previous works have focused on two dimensional (2D) palmprint recognition in the past decade. However, 2D palmprint images could be easily forged or affected by noise, causing potential security risks for practical applications. Therefore, three dimensional (3D) palmprint recognition has been regarded as a promising way to further improve the performance of palmprint recognition systems. In this paper, we have proposed an efficient 3D palmprint recognition method by using local texture feature sets. We first employ shape index representation to demonstrate the geometry characteristics of local regions in 3D palmprint data. Then, we incorporate rich local texture cues from two complementary sources-local ternary pattern (LTP) and Gabor wavelet to extract features from the shape index image-proving that the combination is more accurate than either feature set alone, and finally fuse them at a matching score level. Further experiments on Hong Kong Polytechnic University 3D palmprint database validate that our method outperforms existing state-of-the-art methods in terms of recognition accuracy, showing the effectiveness of our method. Key words: 3D palmprint recognition; local texture feature; shape index; multiple feature fusion 收稿日期:2014-02-17;收到修改稿日期:2014-04-16 基金项目:国家自然科学基金(61300084,61402143);浙江省自然科学基金(Q14F020040);杭州电子科技大学科研启动基金(KYS055613014)作者简介:杨冰(1985-),女(汉族),安徽砀山人。博士,讲师,主要研究方向为模式识别、计算机视觉、机器学习。E-mail:yb@https://www.wendangku.net/doc/806695489.html,。 https://www.wendangku.net/doc/806695489.html,
图像采集通用控制系统的设计与实现
图像采集通用控制系统的设计与实现 张超,古乐野,徐晓,乔忠慧 (中国科学院成都计算机应用研究所,四川 成都610041) 摘要:本文介绍了一种基于ARM的实时图像采集通用控制系统的设计与实现。在设计中主要采用了LPC2132微控制器芯片和四相步进电机正弦波驱动器STK672—080芯片。文中主要介绍了该控制系统的工作原理、系统组成、硬件设计以及软件设计中的关键问题。 关键词:ARM;图像采集;人机交互;步进电机 中图分类号:TP368.1文献标志码:B Design and Implementation of Universal Control System in Image Collection ZHANG Chao, GU Le-ye, XU Xiao, QIAO Zhong-hui (Chengdu Institute of Computer Application, Chinese Academy of Sciences, Chengdu, Sichuan 610041, China) Abstract:This paper introduced the design and implementation of real-time image collection’s control system based on ARM. LPC2132 microcontroller and the sine wave stepping motor driver were adopted in the system. This paper also described the construct of the system, design of hardware, several critical techniques in the development of software of the control system. Key words: ARM; image collection; human-computer interaction; stepping motor 0 引言 OCR(Optical Character Recognition)阅读机是以实时图像采集和图像处理为核心技术的, 主要由送纸机构、扫描主体和接纸机构三部分组成。送纸机构主要功能是搓动纸张,并将纸张传送到扫描主体中;扫描主体的主要功能是采集图像,并将纸张传送到接纸机构中;接纸机构主要功能是装载已经扫描过的纸张。在OCR阅读机中,控制系统的性能直接决定图像采集的速度。本文介绍了一种基于ARM的图像采集通用控制系统的设计方案,这种方案比较稳定、可靠,还大大提高了图像采集的速度。 1 系统结构设计和工作原理 图1 OCR阅读机的控制系统部分组成框图 本控制系统主要有ARM主控模块、电源模块、信号检测模块、电机驱动模块和显示驱动及按键模块五个部分;ARM控制模块是主控模块;电源模块提供系统中各芯片所需的电
基于单片机的红外测距系统设计-开题报告
武汉大学珞珈学院本科生毕业论文(设计)开题报告 论文题目:基于单片机的红外测距系统设计 系:电子信息科学系学号: 20100802041 姓名:钱源 一、论文选题的目的和意义 红外线是不可见光,是电磁波的一种形式,可以用来进行距离的测量,其应用历史可以追溯到上世纪60年代。现代科学技术的发展进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在物体上反射回来的激光束探测物体的距离。由于受恶劣的天气、污染等因素影响,使反射的激光束在一定功率上探测距离比可能探测的最大距离减少一半左右,损失很大,影响探测的精确度;微波雷达测距技术为军事和某些工业开发采用的装备和振荡器等电路部分价格昂贵,现在几乎还没有开拓民用市场;超声波测距在国内外已有人做过研究,由于采用特殊专用组件使其价格高,难以推广;红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。另外红外测距的应用越来越普遍。在很多领域都可以用到红外测距仪。红外测距一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。 红外测距的研究就非常有意义了。红外线测距仪指的就是激光红外线测距仪,红外测距仪----用调制的红外光进行精密测距的仪器,测程一般为1-5公里。在100米以内则超声波测距更有优势,但是超声波测距的距离一般无法测量1米以内,而红外测距则可以这一段距离的不足,而且有着不错的精度,在本课题中研究的就是这一类情况的红外线测距。 二、国内外关于该论题的研究现状和发展趋势 (1)国内: 根据《国内近年来红外光电测距仪的发展情况》,随着国家对外开放政策的实施和测量工作的需要,近年来国内一些光学仪器厂和电子仪器厂分别从瑞典、瑞士和日本等国引进几种红外测距仪组装线,组装测距仪,我国有关工厂和院校近年来也研制出一些产品。由于微处理机在国产测距仪上的应用,大大缩小了仪器的体积,同时也减少了出故障的几率,使得国产测距仪的性能和质量都较过去有很大的提高。在国家“六·五”计划攻关中,常州第二电子仪器厂研制的DCHZ 型多功能红外测距仪就是一个很好的例证。该产品经国家测绘局测绘科学研究所光电测距仪检测巾心进行全面质量鉴定后认为:该仪器外型美观、体积小、重量
《房屋建筑室内装修设计》图例及符号
第五章《房屋建筑室内装修设计》图例及符号 一、建筑室内装饰装修设计图例及符号 1、常用线型 建筑室内装饰装修设计图可采用的线型包括实线、虚线、单点长划线、折断线、波浪线、点线、样条曲线、云线等,各线型应符合下表的规定。 名称线型线宽一般用途 实线粗 b 1、平、剖面图中被剖切的主要建筑构造和 装饰装修构造的轮廓线; 2、建筑室内装饰装修立面图的外轮廓线; 3、建筑室内装饰装修构造详图中被剖切的轮 廓线; 4、建筑室内装饰装修详图中的外轮廓线; 5、平、立、剖面图的剖切符号 (注:地平线线宽可用 1.5b,图名线线宽可 用2b) 中0.5b 平面图、剖立面图中除被剖切轮廓线外的可见 物体轮廓线 细0.25b 图形和图例的填充线、尺寸线、尺寸界线、索 引符号、标高符号、引出线等 虚线中0.5b 1、表示被遮挡部分的轮廓线; 2、表示平面中上部的投影轮廓线; 3、预想放置的建筑或装修的构件; 4、运动轨迹 细0.25b 表示内容与中虚线相同,适合小于0.5b的不 可见轮廓线 单点长划线0.25b中心线、对称线、定位轴线折断线0.25b不需要画全的断开界线 续表 3.2.2 波浪线0.25b 1、不需要画全的断开界线; 2、构造层次的断开界线 点线0.25b 制图需要的辅助线 样条曲线0.25b 1、不需要画全的断开界线; 2、制图需要的引出线 云线0.25b 1、圈出需要绘制详图的图样范围; 2、材料标注 图线的宽度b,宜从下列线宽系列中选取:1.0、0.7、0.5、0.35mm。各图样可根据复杂程度与比例大小,先选定基本线宽b,再选用表3.2.3中相应的线宽组。 2、线宽组 线宽比线宽组(mm) b 1.0 0.7 0.5 0.35 0.75b 0.75 0.53 0.38 0.26 0.5b 0.5 0.35 0.25 0.18 0.3b 0.3 0.21 0.15 0.11 0.25b 0.25 0.18 0.13 0.09 0.2b 0.2 0.14 0.1 0.07 注:同一张图纸内,各个不同线宽组中的细线,可统一采用较细的线宽组的细线。 3、比例 比例宜注写在图名的右侧或右侧下方,字的基准线应取平。比例的字高宜比图名的字高小一号或二号(图)。
无线图像采集系统的设计与实现
0引言 视频监控目前已得到广泛的应用,一般采用如下方案:使用具有较高成像质量的CCD(charge-coupled device)传感器摄像头,通过S-VIDEO端子实时传送数据,这种方案需要摄像头与采集端设备连线,同时监控中心需要有较大的存储空间来存储图像与视频片段,还需要电视墙来对不同地点的目标进行实时监控,此方案适合于公共场所的安防和监控,实时性高,但能耗大,成本昂贵。对于需要远程监控的生产环境,例如农业、种植业、畜牧业以及工业厂房的监控,包括动物的异常举动,种植现场环境的突然变化,厂房可疑人员的入侵监控等,上述方案难以满足图像与视频中信息智能处理的需要,而基于嵌入式ARM-Linux的无线图像采集系统成为合适的选择。在802.11无线协议应用经已成熟的前提下,研究的重点在于传感器节点所采用的硬件平台和数据流格式,当前的主流方案包括:①ARM+DSP(digital signal processing)[1]:由ARM 架构CPU(central processing unit)担任传感器节点的总控制角色,利用DSP信号处理芯片的高速处理能力对图像数据进行压缩和相关预处理,该方案适合需要较多数值运算的JPEG (joint photographic experts group)数据流。②FPGA(field-progra-mmable gate array)+视频编解码芯片[2]:利用FPGA的并行处理能力同时传送和处理多组图像与视频数据,由于FPGA的硬件可重写性,该方案适合于在实验阶段进行设计上的查错和优化。③ARM:使用高主频的ARM架构CPU,同时担任中央控制和图像处理的角色。ARM为通用精简指令集架构,具有足够的流水线来应对复杂的逻辑运算,适用于处理逻辑运算量较大的压缩算法,例如PNG格式所采用的Deflate压缩算法,同时,ARM-Linux架构具有成熟的工作基础,固采用方案3设 收稿日期:2010-01-10;修订日期:2010-03-09。
掌纹诊病的精细纹路识别与提取方法
掌纹诊病的精细纹路识别与提取方法 根据掌纹中特征的表示以及匹配方法, 可大致将掌纹识别方法分为四个类别, 分别是基于结构的方法、基于统计的方法、基于子空间的方法和基于编码的方法. 此外, 我们还列出了一些不属于这些类别的方法. 2.1 基于结构的方法 基于结构的方法主要是指利用掌纹中主线和皱褶的方向和位置信息实现掌纹识别的方法. 这一类的方法主要由两部分组成: 1) 提取掌纹中的纹线特征; 2) 纹线特征的有效表示和匹配. 线特征的有效表示主要是指便于匹配, 并且占用尽可能少的存储空间. 对于特征的提取, 较多使用的是各种线检测算子以及边缘检测算子; 对于特征的表示, 主要是采用直线段或特征点代替掌纹纹线; 而特征的匹配大多采用特征点之间的欧氏距离或Hausdor? 距离, 以及用于线段匹配的Hausdor? 距离等. 2.2 基于统计的方法 基于统计的方法是指利用掌纹图像的重心、均值、方差等统计量作为特征的识别方法, 可进一步分为基于局部统计量和全局统计量的方法. 其中基于局部统计量的方法需要将图像分成若干小块, 之后统计每块的均值和方差等统计信息, 最后连接为表示整个掌纹的特征向量; 而基于全局统计量的方法则直接计算整个图像的矩和重心等统计信息作为掌纹的特征. 匹配时, 一般采用矢量比较时常用的相关系数、一阶范数或欧氏距离. 2.3 基于子空间的方法 子空间方法将掌纹图像看作是高维向量或矩阵,通过投影或变换, 将其转化为低维向量或矩阵, 并在此低维空间下对掌纹表示和匹配. 根据投影或变换的性质, 子空间方法可以分为线性子空间方法和非线性子空间方法. 目前应用较为广泛的是线性子空间方法, 主要包括独立成分分析(Independent component analysis, ICA)、主成分分析(Principal component analysis, PCA)、线性判别分析(Lineardiscriminant analysis, LDA) 等. 与前两类方法不同, 基于子空间的方法大都需要对每个类别的掌纹图像构造训练集, 在该训练集上计算最优的投影向量或矩阵, 并将投影后的向量或矩阵作为该类掌纹的特征. 在识别阶段, 首先对待测掌纹图像作相同投影或变换, 之后采用最近邻或最近特征线(Nearestfeature line, NFL) 分类器分类. 基于子空间的方法已成功地应用于人脸识别, 移植到掌纹识别后也取得了很好的效果. 2.4 基于编码的方法 基于编码的方法是指先用滤波器对掌纹图像滤波, 之后根据某些规则将滤波后的结果进行编码的方法. 通常特征都按照比特码的形式存储, 对得到的特征码多采用二进制的\与" 或者\异或" 计算相似度. 该类方法主要包括三个核心部分: 滤波器的选择(Gabor, 高斯, 高斯的导数), 编码规则(最大值, 序数关系), 以及匹配方式(点对点, 点对区域).
基于单片机的红外测距系统设计
武汉大学珞珈学院毕业论文 基于单片机的红外测距系统设计
摘要 现代科学技术的发展,进入了很多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外光测距。为了实现物体近距离、高精度的无线测量而采用了红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换和显示程序,完成了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,本系统结构简单可靠、体积小、测量精度高、方便使用。 红外测距的探测距离较短,一般在几十厘米之内,本文介绍的一种基于AT89C52单片机设计的红外测距仪,可以测量距离。 首先,在绪论中,介绍了红外线及红外传感器的分类和应用、AT89C52单片机的应用与说明以及MCP3001芯片的简介。其次,阐述了与红外测距的工作原理基本结构,对红外测距传感器也做了详细说明。再次,介绍了红外测距的硬件设计和软件设计。 在硬件设计中,介绍了红外测距实现的构想,给出红外测距硬件电路原理图,并说明了红外测距传感器、键盘、A/D转换电路、LCD显示电路工作原理及AT89C52单片机的管脚分配。在软件设计中,说明了整个程序流程及各程序设计的函数。最后,是对整个设计的结论,说明了红外测距实现的可行性。 关键词:红外测距 A/D转换实时显示红外线单片机
目录 第1章绪论 (1) 1.1 课题研究的背景和意义 (1) 1.2 本课题研究的热点及发展现状 (2) 1.3 本课题研究的目的 (2) 1.4 本课题研究的内容 (3) 第2章红外测距的工作原理与基本结构 (4) 2.1.方案及设计思想: (4) 2.2 红外测距系统的基本结构 (5) 第3章红外测距的硬件设计 (6) 3.1红外收发模块 (6) 3.2 A/D转换模块 (7) 3.3 LCD显示模块 (10) 3.4 AT89C52单片机概述 (11) 3.5整个红外测距系统显示 (13) 第4章红外测距的软件设计 (15) 4.1 程序流程图 (15) 第5章系统软硬件调试 (17) 5.1 硬件调试 (17) 5.2 软件调试 (17) 5.3测试结果绘图 (17) 5.4 调试中遇到的问题 (19) 结论 (20) 参考文献 (21) 附录 (1) 后记 (29)
LabVIEW应用于实时图像采集及处理系统
LabVIEW应用于实时图像采集及处理系统 2008-7-29 9:35:00于子江娄洪伟于晓闫丰隋永新杨怀江供稿 摘要:本文在LabVIEW和NI-IMAQ Vision软件平台下,利用通用图像采集卡开发一种图像实时采集处理虚拟仪器系统。通过调用动态链接库驱动通用图像采集卡完成图像采集,采集图像的帧速率达到25帧每秒。利用NI-IMAQ Vision视频处理模块,进行图像处理,以完成光电探测器的标定。该系统具有灵活性强、可靠性高、性价比高等优点。 主题词:虚拟仪器;图像处理;LabVIEW;动态链接库 1.引言 美国国家仪器(NI)公司的虚拟仪器开发平台LabVIEW,使用图形化编程语言编程,界面友好,简单易学,配套的图像处理软件包能提供丰富的图像处理与分析算法函数,极大地方便了用户,使构建图像处理与分析系统容易、灵活、程序移植性好,大大缩短了系统开发周期。在推出应用软件的基础上,NI公司又推出了图像采集卡,对于NI公司的图像采集卡,可以直接使用采集卡自带的驱动以及LabVIEW中的DAQ库直接对端口进行操作。 但由于NI公司的图像采集卡成本很高,大多用户难以接受,因此硬件平台往往采用通用图像采集卡,软件方面的图像处理程序仍采用LabVIEW以及视频处理模块编写。本文正是基于这样的目的,提出了一种在LabVIEW环境下驱动通用图像采集卡的方案,在TDS642EVM高速DSP视频处理板卡的平台下,完成实时图像采集及处理。 在图象处理的工作中主要完成对CCD光电探测器的辐射标定。由于探测器在自然环境下获取图像时,会受到来自大气干扰,自身暗电流,热噪声等影响,使CCD像元所输出信号的数值量化值与实际探测目标辐射亮度之间存在差异,所以要得到目标的精确图像就必须对探测器进行辐射标定。 2.图像采集卡简介 闻亭公司TDS642EVM(简称642)多路实时视频处理板卡是基于DSP TMS320DM642芯片设计的评估开发板。计算能力可达到4Gips,板上的视频接口和视频编解码芯片Philips SAA7115H相连,实现实时多路视频图像采集功能,支持多种PAL,NTSC和SECAM视频标准。本系统通过642的PCI接口与主机进行数据交换。PCI支持“即插即用(PnP)”自动配置功能,使图像采集板的配置变得更加方便,其一切资源需求的设置工作在系统初启时交由BIOS处理,无需用户进行繁琐的开关与跳线操作。PCI接口的海量数据吞吐,为其完成实时图像采集和处理提供保证。 3.系统组成及工作原理
最全的房屋装修方案
1.编制依据 规范、标准 《屋面工程质量验收规范》GB50207-2002 《建筑地面工程施工质量验收规范》GB50209-2002 《建筑装饰装修工程质量验收规范》GB50210-2001 《建筑工程施工质量验收统一标准》GB50300-2001 《外墙饰面转工程施工及验收规程》JGJ126-2002 《住宅装饰装修工程施工规范》GB50327-2001 《铝合金门窗安装及验收规程》JGJ103-96 《外墙外保温技术规程》DBJ/T01-66-2002 《建筑安装分项工程施工工艺规程》DBJ/T01-26-2003 图集 坡道、台阶、散水(92J101)楼梯(辽92J401)外墙外保温(02J121-1) 屋面(2002J205)雨水管(92J201)排风道、排烟道(2002SJ802) 2.工程概况 2.1工程简介 本工程位于营口市经济技术开发区平安大街西侧,碧霞山公园南侧。工程名称是福地山水文园6#、7#、8#楼住宅工程,建设单位为营口翔峰置业有限公司。设计单位为北京五豪世纪建设设计有限公司。本工程总建筑面积为16320.04㎡。其中6#楼建筑面积5418.12㎡,7#楼5418.12㎡, 8#楼5483.8㎡,均为地上九层,地下一层。基础均为筏型基础,结构均为框架结构。 本工程总包单位为北京住总第一开发建设有限公司,分包单位为安徽安庆皖力建筑劳务有限公司。本工程为初装修,质量目标为合格。装修范围包括屋面工程、地面工程、防水工程、外墙保温、外墙面砖工程、墙面抹灰、腻子工程、涂料工程等。(门窗工程为甲供)
3.施工部署: 由于本工程为初装修,工期紧张,为了保证本工程高速、顺利完成,我们提前做好施工准备,从人、机、料等各方面保证工程的进度。 装修工程的总体施工顺序为:顶棚工程→墙面施工→地面工程施工。 主要项目施工安排:楼地面工程、装饰工程等竖向施工流向为自上而下按层进行施工;砌体工程自下而上,在结构施工期间插入施工。 施工流程: 室内装修:放线→砌空心砼砌块→墙体抹灰→立门窗口→口角抹灰→顶棚刮腻子→水暖、电气工程→油漆浆活 外檐装修:弹垂直线→立门窗→抹灰找垂直、找平→外檐涂料、贴面砖等→散水 屋面工程:保温层→找坡层→找平层→防水层→保护层→铺设水泥瓦 3.1. 施工人员组织 ①本工程由北京住总第一开发建设有限公司福地山水文园项目经理部负责土建部分工程 施工,由项目经理负责全面工作,生产经理、主任工程师负责生产指挥、技术管理工作。 ②电梯安装、门窗、水、电及消防、通风等各专业分包公司应服从总包单位的指挥,按照 总的工期要求插入施工。 3.2.管理目标
红外测距传感器的工作原理及使用
光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
住房装修设计理念
1、房子装修以现代简约为主,即以白的、原木色为主,略带灰色、淡粉色、黑色。 2、房间设计要采光好,以通透为主。同时,房间的摆设以简约为主,也要最大程度上利用好空间。 3、具体细节:(1)玄关:简约,以白色为主,可存放鞋包等物。(2)厨房:以白色、灰色为主,和家里一样的材质。需要的厨具:双门电冰箱,尺寸:油烟机,尺寸:烤箱,尺寸:洗碗机,尺寸:电饭煲等各种锅具:漏水槽、水槽,尺寸:热水器:尺寸组合橱柜,存放碗筷、油盐酱醋等物:垃圾桶(3)饭厅组合书房:以白色为主,参考图片。需要的家居有书架、办公桌、餐桌。(4)大厅:以白色为主,电视背景墙为原木色,下面做搁架,存放ps2、有线电视小盒子等。需要的家居为:电视机,尺寸:组合沙发,尺寸:茶几,尺寸:立式空调,尺寸:投影组合设备,和吊灯统筹考虑:装饰画、植物盆栽:时钟:(5)阳台:以白色为主,需要家居为:全自动洗衣机,组合台盆尺寸:组合橱柜,可存放衣架等物晾衣架观景沙发(6)走廊:顶灯设计参考图片,尽头设计参考图片。(7)洗手间:颜色以白色和原木色为主,最好干湿分开,需要的家居为:沐浴房:尺寸能否大于等于140*110cm,可放置宝宝的游泳池马桶:toto,确保不能漏水台盆上的镜子要大,里面可放置东西,台盆为正方形,兼做化妆台。(8)宝宝房:确保材料最大程度的环保绿色,采光好,颜色以白色、粉红色为主,要有公主风格。一面墙为涂鸦墙,要购买相关材料,一面墙张贴墙纸。飘窗设计参考图片。所需家居:宝宝床,尺寸:宝宝写字台,尺寸:宝宝衣橱,尺寸:壁式空调(9)主卧:确保材料最大程度的环保绿色,采光好,颜色以白色为主,清新亮丽风格。床头处的墙张贴墙纸。飘窗设计参考图片。所需家居:大床,尺寸:橱柜设计,有裤架、大衣架、衬衫架、大小抽屉若干、带锁抽屉1~2个。壁式空调备注:窗帘、灯具再商量。
图像采集系统设计
DSP实习报告 题目:图像采集系统的设计 班级:xxx 姓名:xxx 学号:xxx 指导老师:xxxx
目录 一.实习题目 (3) 二.实习背景知识 (3) 三.实习内容 (5) 四.实习程序功能与结构说明 (8) 六.实习心得 (19)
一、实习题目 图像采集系统的设计 二、实习目的: 1、熟练掌握数字信号处理的典型设计方法与技术手段; 2、熟悉D6437视频输入,输出端的操作及编程。; 3、掌握常用电子仪器设备的使用方法; 4、熟悉锐化变换算法。 三、实习背景知识 1、计算机 2、CCS3.3.软件 3、DSP仿真器 4、EL_DM6437平台 EL-DM6437EVM是低成本,高度集成的高性能视频信号处理开发平台,可以开发仿真达芬奇系列DSP应用程序,同时也可以将该产品集成到用户的具体应用系统中。方便灵活的接口为用户提供良好的开放平台。采用该系列板卡进行产品开发或系统集成可以大大减少用户的产品开发时间。板卡结构框图如图所示:
板卡硬件资源: TMS320DM6437 DSP ,可工作在400/600 MHz; 2 路视频输入,包括一个复合视频输入及一个S端子视频输入; 保留了视频输入接口,可以方便与CMOS影像传感器连接; 3 路视频输出,包括2路复合视频,一路S端子输出; 128MByte 的DDR2 SDRAM存储器,256MBit的Nor Flash存储器;用户可选的NAND Flash接口; 可选的256K字节的I2C E2PROM; 1个10M/100Mbps自适应以太网接口; 1 路立体声音频输入、1路麦克风输入,1路立体声音频输出; USB2.0高速接口,方便与PC连接; 1个CAN总线、1个UART接口、实时时钟(带256Byte的电池保持RAM);4个DIP开关,4个状态指示LED; 可配置的BOOT模式; 10层板制作工艺,稳定可靠; 标准外部信号扩展接口; JTAG仿真器接口; 单电源+5V供电; 板卡软件资源:
基于单片机的红外测距系统设计 - 副本
北京联合大学应用科技学院 实训报告 基于单片机的红外测距系统设计 系别电子 专业电子信息工程技术 年级12级02班 组长:张祎楠2012191294068 组员:殷跃2012191294070 白雨童2012191294063
目录 第1章绪论 (1) 1.1 本课题研究的目的 (1) 1.2 本课题研究的内容 (1) 13整个红外测距系统显示 (4) 第2章红外测距的软件设计 (5) 后记 (6)
第1章绪论 1.3 本课题研究的目的 我们所进行的课题便是做一个简易的,精确的,近距离的距离检测仪,这也是对我们所学知识的一种考验方法,从中我们可以更系统的认识单片机,了解AD转换和红外收发模块。 1.4 本课题研究的内容 红外传感器的测距基本原理为:红外发射电路的红外发光管发出红外光,红外接收电路的光敏接收管接收发射光,根据发射光的强弱判断出所测的距离。由于接收管接收的光强度是随着发光管与测量物的距离变化而变化的,因而,与测量物的距离近则接收光强,距离远则接收光弱。 具体方法如图1所示,红外模块发出并接收到红外线信号;AD转换模块将接收到的模拟信号转换成数字信号再交给单片机, 启动单片机中断程序,此时单片机得到数字信号也就是电压值,再由软件进行判别、计算,得出距离数并送给LED/LCD显示。 红外模块 电压距离公式 AD模块 单片机 显示模块 图1.1 反射能量法原理
图3.7 protues中整体系统 单片机AT89C52左端分别接了时钟电路和复位电路,这是单片机最小的系统。XTAL1和XTAL2串连一个晶振,并且分别接上一个20p的电容,两个电容另一端都接地,构成时钟电路。RST同时接上100p电容,4脚按键,1k电阻,4脚按键另一端接上一个1k电阻再与100p电容并联接VCC,1k电阻另一端则接地,构成复位电路。 单片机AT89C52右端P0端同时接LED的D1-D7端口和排阻,P2.0接CLK,P2.1接DO,P2.2接CS,P2.5接E,P2.6接RW,P2.7接RS。 MCP3001的VREF接vcc,IN+接红外距离传感器的Vo。 软件程序 #include
基于STM32的红外测距系统设计学士学位论文
基于STM32的红外测距系统设计 摘要 随着现代科学技术的发展,出现了很多新的领域,为了实现对物体近距离、高精度的无线测量,本论文对红外测距领域进行了研究。本论文采用单片机作为处理器,编写A/D转换程序及LCD显示程序,红外传感器作为工作模块,完成一套高精度显示、实时测量的红外测距系统。本系统结构简单、体积小、测量精度高、成本低、方便使用。 本论文所介绍的是一种基于STM32单片机并运用日本夏普公司型号为GP2Y0A21的红外传感器所设计的红外测距系统。首先,介绍红外线及红外传感器的分类及应用、STM32单片机的简介与功能;其次,阐述红外测距系统工作原理及基本结构并对单片机、红外传感器、LCD液晶显示屏的工作电路做了介绍;再次,对系统进行了整体设计构想,先后对系统硬件及软件进行设计,并对整个系统的功能进行了调试。最后对整个设计进行总结,说明红外测距系统实现的可行性。 关键词红外测距;单片机;A/D转换;LCD
STM32-based infrared ranging system design Abstract With the development of modern science and technology, there are many new areas, in order to achieve the object close range, high-precision wireless measurement,this topic of infrared ranging is studied. This topic using SCM as the processor, to write A/D converter and LCD display program, an infrared sensor as a working module, complete set of precision display, real-time measurement of infrared ranging system. This system has the advantages of simple structure, small size and high accuracy, low cost and convenient use. This paper introduced is based STM32 microcontroller and use of Japan's Sharp Corporation model GP2Y0A21 infrared sensor designed infrared ranging system. Firstly, introduce the classification and application of infrared distance measurement,it also introduces the function of STM32 microcontroller. Then illustrate the work theory and basic structure of it and introduce the LCD screen and work circuit. Again, the system has carried on the overall design idea, successively on the system hardware and software design, and probes into the function of the whole system debugging. Finally, summarize the entire design to illustrate the feasibility of infrared distance measurement. Keywords Infrared range, SCM, A/D converter, LCD