2010 Dynamic Model and Simulation
2010 1st International Conference on Applied Robotics for the Power Industry Delta Centre-Ville Montréal, Canada, October 5-7, 2010
1
Dynamic Model and Simulation of an Inspection Robot for Power Transmission Lines: Preliminary Results
Luis G. García-Valdovinos, Arturo Velarde-Sánchez, Luis del Llano-Vizcaya, Tomás SalgadoJiménez, Fernando Hernández-Rosales, Felipe Martínez-Soto
Although the double-arm robot is multi-dof (degrees of freedom), the analysis is reduced to modeling a two dof robot characterizing the turning movement. Rocha and Sequeira [7], propose a two dof vertical robot arm whose motion along the power line resembles the motion of a cabbage worm. The well-known computed torque control scheme is implemented so as to analyze the robot’s behavior when avoiding obstacles; one robot’s extremity grasps the cable while the other one detaches from the cable to negotiate the obstacle. Tang et al. [8] present the kinematics analysis of a 3-arm mobile robot. Both, fore arm and rear arm, are analyzed as a 3 dof robot arm; only the kinematics is presented. Zhu et al. [9], address the problem of maintaining the robot body in a horizontal pose despite the overhead ground wire catenary. A double-arm mobile robot is considered and both, fore arm and rear arm, adjust their vertical position so that the robot can keep the horizontal pose. Lagrange methodology is used to achieve the pose adjustment mechanism dynamics. In [10], de Souza et al. model the robot as a simple pendulum and analyze its performance when wind is acting on the robot. The aforementioned works propose different approaches to study the behavior of inspection robots, however, none of them present a complete non linear robot dynamics. In this paper, the Euler-Lagrange formalism is used to develop the dynamic model of a double-arm inspection robot. Considering an open kinematics chain, with rigid joints and links, fully actuated robot, the dynamic model is verified through numerical simulations under PD+G and PID control schemes. A. Contribution Preliminary results that validate the kinematics and dynamics of the 5 dof robot arm are presented. Full nonlinear dynamics as well as inverse, direct and differential kinematics have been obtained to verify the performance of the robot when it is requested to follow a circumference. Simulation results are present to show that the task is exactly done as requested, in time and space. It has practical implications, since before manufacturing a prototype is possible and necessary to study the robot’s behavior. Dynamics can be as complex (complete) as required, starting from this idea dynamics becomes very useful, for instance, when it is required to know the actuators capacity in order to perform a task exactly as requested, even in the presence of disturbances.
Abstract-- Power line inspection and maintenance are fields of application where robotics has yet to be introduced. This paper presents the dynamic model and control of a 5 dof (degrees of freedom) dual-arm hanging robot manipulator. Prior to the construction of a prototype, it is worthwhile and necessary to model and analyze the robot performance, by means of numerical simulation, under conditions closer to reality, such as wind currents, joint and contact friction, sampling time, train gear and actuator dynamics, control strategies, among others. For the sake of simplicity, and without loss of generality, the inspection robot is considered as an open kinematics chain, wherein one of its extremities is fixed to the line and the other one is free to move. Based on the Euler-Lagrange formalism, the accomplished model is non-linear, fully actuated, and nonredundant, with rigid links and joints. Validity of the dynamic model is verified through numerical simulations by using Matlab-Simulink. Index Terms—Robot dynamics, Inspection robot, Power transmission lines, Robot arm control.
I. INTRODUCTION EVERAL works can be found in the literature addressing the modeling and analysis of power transmission lines inspection robots. In [1], Wang et al. present the kinematics and a simplified dynamic model of a double-arm mobile robot. The control system is decomposed into two subsystems, a slowly-changing subsystem and a fast-changing subsystem based on a singular perturbation model. In [2], ADAMS is used to analyze the kinematics and dynamics of a double-arm mobile robot. Relationship between joint motions, tracking of end arm, among other design parameters is obtained from the simulation. On the other hand, Xiao et al. [3,4], present a dynamic model that takes into account the cable dynamics. Both models are coupled in the grasping point under two typical postures of passing obstacles. Lagrange equations of motion and modal synthesis methodologies are used. Li Cai et al. [6] propose a hierarchical control strategy, wherein a fuzzy control scheme is implemented at the low level (actuators).
This work was supported in part bythe SEP-CONACyT Sectorial Fund under Grant 61449 and the CFE-CONACyT Sectorial Fund under Grant 48325. All authors are with the Applied Research Division, Center for Engineering and Industrial Development (CIDESI), Av. Pie de la Cuesta 702, Col. Desarrollo San Pablo, C.P. 76130, Querétaro, Querétaro, México. Tel. +52 442 211 9800, e1262 (corresponding author e-mail: ggarcia@cidesi.mx, luisgovinda@https://www.wendangku.net/doc/c513048793.html, ).
S
978-1-4244-6634-4/10/$26.00 ?2010 IEEE
2
B. Organization The paper is organized as follows. Section II pre presents an overview of the kinematics and dynamics, finally, Section III , presents the numerical results of the robot performing a task.
II. KINEMATICS AND DYNAMICS ICS Prior to the manufacturing of a robot prototype is worthwhile and necessary to analyze its behavi by means of behavior valid mathematical models, such as kinematics and dynamics. Although, mathematical modeling can be dull and cumbersome, it represents great benefits such as: , ? Mechanical design of the robot (materials, geometrical form of links, kinematics c configuration, location of center of mass, torque load). Choice of suitable actuators and train gears. Analysis of the robot performance when it is subject to disturbances (wind currents, joint friction and contact friction, impacts) erformance Analysis of the robot performance subject to parametric uncertainty. Synthesis of new control laws or choice of suitable control laws for specific conditions. Optimal planning of trajectories for the obstacles avoidance Active compensation of gravity to reduce control input torques
? ?
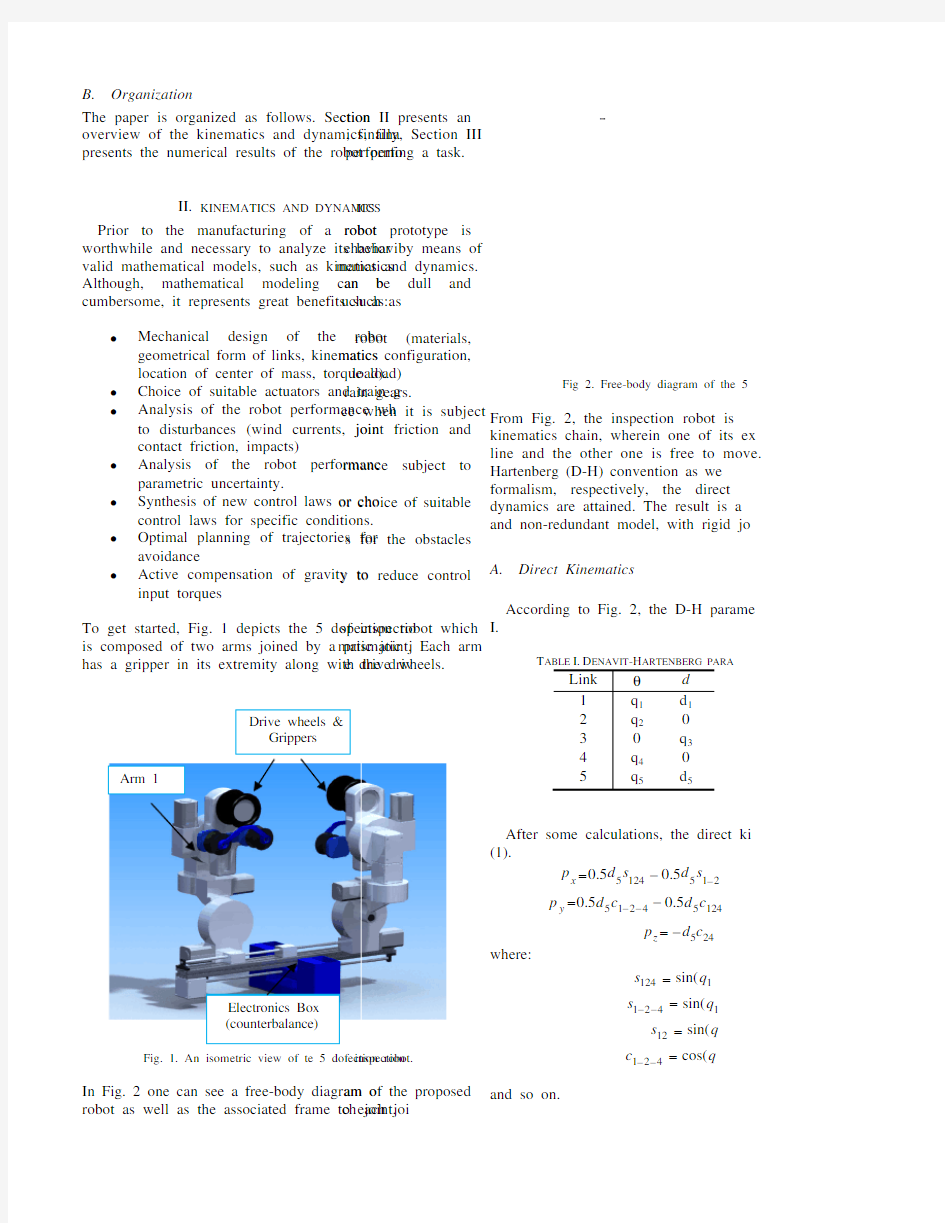
Fig 2. Free-body diagram of the 5 dof robot arm.. body
? ? ? ?
From Fig. 2, the inspection robot is analyzed as an open obot a kinematics chain, wherein one of its extremities is fixed to the extremit line and the other one is free to move. Based on the DenavitHartenberg (D-H) convention as well as the Euler-Lagrange we formalism, respectively, the direct kinematics and the th dynamics are attained. The result is a nonlinear, fully actuated, and non-redundant model, with rigid joints and links. ant A. Direct Kinematics
H According to Fig. 2, the D-H parameters are shown in Table
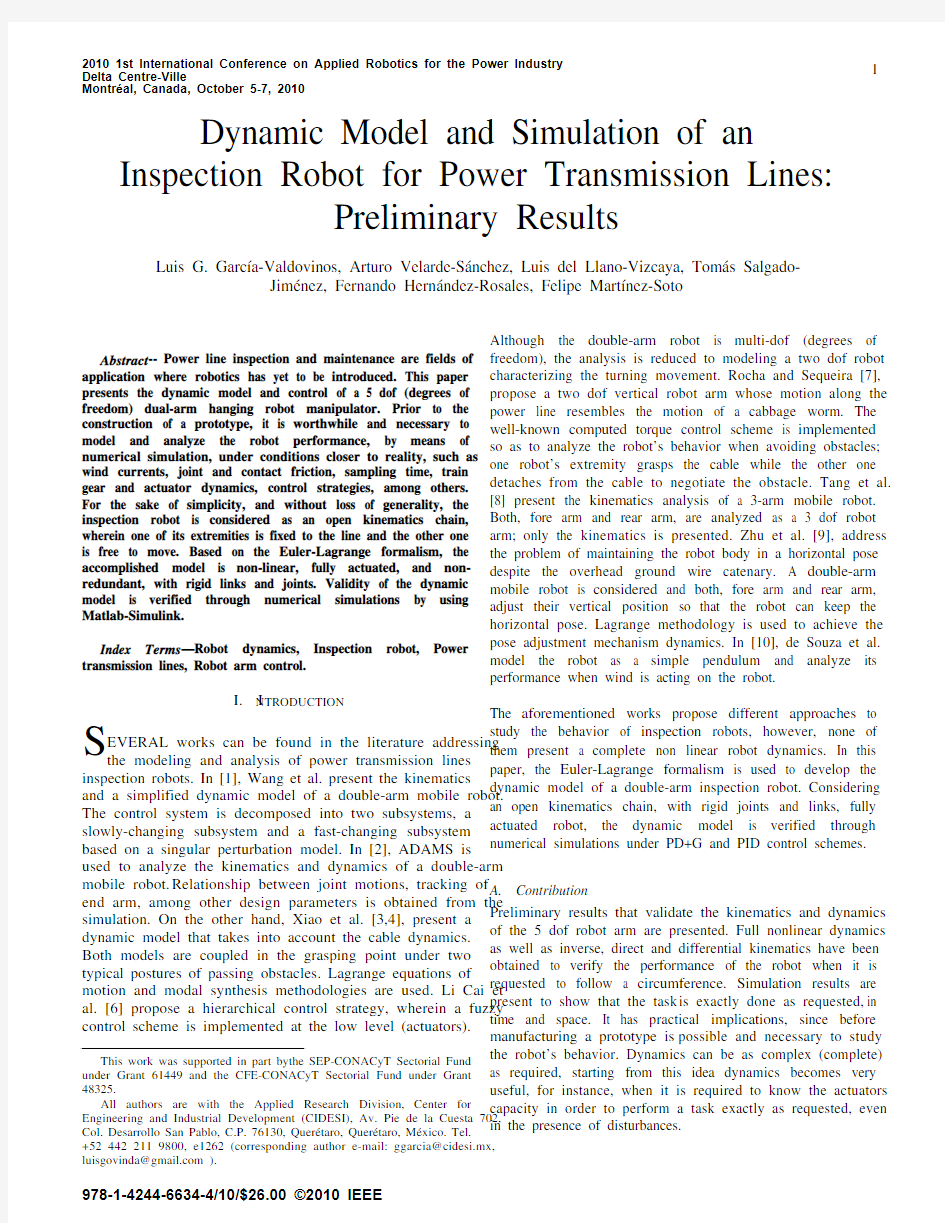
To get started, Fig. 1 depicts the 5 dof inspection robot which is composed of two arms joined by a prismatic joint. Each arm has a gripper in its extremity along with the drive wheels.
I.
TABLE I. DENAVIT-HARTENBERG PARAMETERS OF THE ROBOT.
Drive wheels & Grippers Arm 1
Arm 2
Link 1 2 3 4 5
θ q1 q2 0 q4 q5
d d1 0 q3 0 d5
a 0 0 0 0 0
α
π/2 π/2 ?π/2 π/2 0
After some calculations, the direct kinematics is given by (1). p x = 0.5d 5 s124 ? 0.5d 5 s1? 2 ? 4 + 0.5q3 s12 ? 0.5q3 s1? 2
p y = 0.5d 5 c1? 2 ? 4 ? 0.5d 5 c124 + 0.5q3 c1? 2 ? 0.5q3 c12 (1) p z = ? d5 c24 ? q3c2 + d1
where:
s124 = sin( q1 + q 2 + q 4 )
Electronics Box (counterbalance)
Fig. 1. An isometric view of te 5 dof inspection rob e robot.
s1? 2 ? 4 = sin( q1 ? q 2 ? q 4 ) s12 = sin( q1 + q 2 ) c1? 2 ? 4 = cos(q1 ? q 2 ? q 4 ) and so on.
In Fig. 2 one can see a free-body diagram of the proposed body robot as well as the associated frame to each joint.
3 B. Inverse Kinematics Inverse kinematics is computed by using a geometrical approach [12]; it is possible to decouple the inverse kinematics problem into two simpler problems, known respectively, as inverse position kinematics and inverse orientation kinematics. Firstly, the position of the intersection of the wrist axes has to be found, hereafter called the wrist center, and then finding the orientation of the wrist. The inverse position kinematics is (2) (10) Where is the generalized coordinate, denotes the symmetric positive-definite inertia matrix, represents the vector of Coriolis and centrifugal forces, denotes the gravitational torques, represents the vector of friction torques, is the control input torque, and is the number of degrees of freedom. Each element of (3) is computed by applying the EulerLagrange formalism [11] as follows
3) (4) The inverse orientation kinematics for determined from the expression and can now be
(11)
(12)
(5) as (6) Final two joint angles can be found as a set of Euler angles corresponding to . Notice that that the right hand side of (6) is completely known since is given (proposed by the user) and can be calculated once the three first joint variables are known. C. Differential Kinematics It is necessary to obtain a mathematical expression that relates the speeds between linear and angular end-effector velocities and the joint velocities (7) where is called the Jacobian matrix. Differentiating (7) with respect to time gives rise to the differential kinematics at the level of acceleration (8) Jacobian matrix and its time derivative are omitted here because of the reduced space. D. Dynamics The dynamic model of a robot manipulator is (9)
Friction Model The friction model is the combination of viscous and Coulom components (13) Next, simulation results validating the mathematical models are presented. III. SIMULATION RESULTS Kinematics and dynamics are verified through numerical simulations using Matlab-Simulink, with ODE45 variable step solver, see block diagram in Fig. 3
Fig. 3. Block diagram in Matlab-Simulink environment.
Simulation is carried out considering a PD+G control [18]; each run lasts 15 seconds.
4 A. Control Design For the sake of simplicity and in order to validate the proposed mathematical models, a PD+G control (Proportional Derivative with Gravity Compensation [13]) is proposed.
Parameters of the Robot: Robot parameters are shown in Table IV.
TABLE IV. ROBOT PARAMETERS.
Parameter
Value (15.8,1,2,1,15.8) (0.5,0.5) 9.81
Unit [kg] [m] [m/ ]
Friction Model Coefficients of the and friction model . (13) are set to
Fig. 4. PD+G control system
Then, the control law is (14) where and are an diagonal positive definite feedback gain matrices; and are -dimensional vectors of desired joint position and desired joint velocity, respectively. Feedback Gains: Feedback gains of the PD+G control are shown in Table II.
TABLE II. FEEDBACK GAINS OF THE PD+G CONTROL.
where
denotes de identity matrix.
The 3D space trajectory is shown in Fig. 5, the real and desired trajectories were plotted as well as different views of the control on Figures 5 to 7.
Gain Kp Kv B. Task Definition
Value diag(250, 300, 95, 120,50 ) diag(4, 5.6, 5.5, 4.5, 6)
The robot is requested to follow a circumference with radius , centered at , parameterized in time with , where and . Thus, one circumference is realized every T seconds. Initial conditions: Joint initial conditions are shown in Table III.
TABLE III. JOINT POSITION AND VELOCITY INITIAL CONDITIONS.
Fig. 5. 3D view of real trajectory (dotted) versus desired trajectory (solid)
As can be seen in Fig. 5, the plot shows the behavior of the desired coordinate axis corresponding to . It is clear that the proposed controller guarantees position tracking, and moreover, the validation of kinematics and dynamics. Figures 6 and 7, depict Cartesian position tracking and joint position tracking, respectively.
Joint ( ( ( ( (
Value (0.5,0) (1.803,0) (1.366,0) (2.2231,0) (3.1416,0)
Unit [rad, rad/s] [rad, rad/s] [m, m/s] [rad, rad/s] [rad, rad/s]
5
Fig. 6. End-effector Cartesian tracking (real (solid) versus desired (dotted)).
In next figures 6 and 7, the plots show the performance paths for each of the links of the manipulator.
Fig. 8. Control signals applied to each joint.
IV. CONCLUSIONS AND FUTURE WORK A dynamic model and control of the 5-dof manipulator was proposed. This method was applied to test a virtual prototype robot by using Simulink and Matlab. To validate the kinematics and dynamics a PD+G control was programmed in order to request the robot to follow a trajectory in 3D space. To the best of our knowledge, there is not any previous work regarding a complete nonlinear model in the field of inspection robots. This work opens a new line of research in the direction of synthesizing new control strategies for inspection robots as well as the construction of more complete dynamics considering actuators dynamics, wind currents, friction, backlash, just to name a few.
V. ACKNOWLEDGEMENT
Fig. 7. Joint position tracking
Finally, torques input control are depicted in Fig. 8. As expected the, joints 2 and 3 are the ones that develop more effort since joint 2 has to load the sliding bar plus the arm 2 as well as joint has to load arm 2.
L.G. García-Valdovinos acknowledges CONACyT grant support #61499. A. Velarde-Sánchez thanks support of CONACyT graduate scholarship.
VI. REFERENCES
[1] L. Wang, S. Cheng, Jianwei Zhang and Ying Hu, “Control of a Redundantly Actuated Power Line Inspection Based-on a Singular Perturbation Model”, IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, Feb. 21-26, 2009. G. Wu, X. Xiao, E Du, S. Li, “Kinematics and Dynamics Simulation of Inspection Robot for Power Transmission Line,” 5th WSEAS Int. Conf.
[2]
6
on Signal Processing, Robotics and Automation, pp. 70 70-76, Madrid, Spain, Feb. 15-17, 2006. Xiao, X., Wu, G. Du E, and Shi Tie-Lin, “Dynamic Simulation and Lin, Experimental Study of Inspection Robot for High-voltage Transmission Line,” Journal of Center South University of Technology Vol. 12, No. 6, Technology, Dec. 2005. E Xiao, X., Wu, G. and Li, S., “Dynamic Coupling Simulation of a Power Transmission Line Inspection Robot with its Flexible Moving Path when Overcoming Obstacles,” 3rd Annual IEEE Conference on Automation Science and Engineering, Scottdale, AZ, Sept. 22 , 22-25, 2007. G. Wu, Xiao X., Hua X., Jinchun D., and Zhenglie Huang, “Motion Planning of Non-Collision Obstacles Overcoming for High Collision High-Voltage Power Transmission Line Inspection Robot”, Lecture Notes on Artificial Intelligence, pp.1195-1205, 2008. Li Cai, Zize Liang, Zeng-guang Hou, and Min Tan, “Fuzzy Control of guang the Inspection Robot for Obstacle-Negotiation,” IEEE International Negotiation,” Conference on Networking, Sensing and Control pp. 117-122, Apr. Control, 2008. The J. Rocha, and J. Sequeira , “The Development of a Robotic System for Maintenance and Inspection of Power Lines,” 35th International Symposium on Robotics, Paris, France, 2004. Tang Li , Fu Shuangfei, Fang Lijin , Wang Hongguang, “Obstaclenavigation Strategy of a Wire-suspend Robot for Power Transmission suspend Lines,” Int’l. Conference on Robotics and Biomimetics Sapporo, Japan, Biomimetics, 2004. X. Zhu, H. Wang, L. Fang, M. Zhao, and Jiping Zhou, “ “Dual Arms Running Control Method of Inspection Robot Based on Obliquitous Sensor,” IEEE/RSJ International Conf. on Intelligent Robots and Systems, pp. 5273-5278, Beijing, China, 2006. Reliable N. Pouliot, P. Latulippe and S. Montambault, “Reliable and Intuitive Teleoperation of LineScout: a Mobile Robot for Live Transmission Line Maintenance,” IEEE/RSJ International Conference on Intelligent Robots and Systems,St. Louis, USA, pp. 1703-1710, 2009. 1710, L-W Tsai, “Robot Analysis: The Mechanics of Serial and Parallel Robot Manipulators,” John Wiley & Sons, New York, N.Y., 1999. Mark W. Spong & M. Vidayasagar, “Robot Dynamics and Control”, ” g ”, John Wiley & Sons, New York, N.Y., 1989. R. Kelly, V. Santibá?ez, J.A. Loria Pérez, “Control of Robot Manipulators in Joint Space” Series Advanced Textboo in Control and Textbooks Signal Processing, Springer, 2005, XXVI, 426 p. T. Salgado Jimenez was born in Guerrero, Mexico, on June 21, 1974. He graduated from the Michiacana University, Mexico, in 1996. He received the Master degree in Mecatrónica by the CINVESTAV-IPN, Mecatrón Mexico in 1999 and the Ph. D. degree in Automation by the LIRMM, France in 2004. His research interest are underwater robotics (ROVs and AUVs), Mobil robotics and system control. At present he works at the Center for Engineering and Industrial a Development (CIDESI).
[3]
[4]
[5]
[6]
[7]
[8]
Luis F. Martínez-Soto (SM’06) was born in Martínez Guanajuato, Mexico, on December 12, 1983. He anajuato, 12 received the B.Eng. (Hons.) degree in 2007 from the Instituto Tecnológico de Querétaro (ITQ), Querétaro, (ITQ) México. He is currently pursuing the MEng degree in pu the Instituto Tecnológico Superior de Irapuato (ITESI), at Irapuato, Guanajuato, México. He is also , a Project Engineer at the Center for Engineering and Industrial Development (CIDESI), at Queretaro, (CIDESI) México. His research interests lie in the dynamic and interest steady-state analysis of power systems. state
[9]
[10]
[11] [12] [13]
Fernando Hernández-Rosales received the B.S. Hernández degree in electronics engineering from the Instituto Tecnológico of Orizaba in 1990. In 1995 and 2004, respectively, he received the M.S. and Ph.D. degrees Ph from the Research Center for Advanced Studies (CINVESTAV), carrying out his studies at the Electronics Division of the Electrical Engineering Department, in Mexico City. Since April 2005, he is Professor at the Division of Applied Research and Academic Degree Programs at the Center for Engineering and Industrial Development (CIDESI) in Querétaro, Mexico. His main interests are intelligent systems, combustion re processes, and energy assessment of industry processes
VII. BIOGRAPHIES
Luis G. García-Valdovinos received the B.S. degree in electronics engineering from the Instituto Tecnológico de Lázaro Cárdenas (ITLAC) in 2000. In 2003 and 2006, respectively, he received the M.S. and Ph.D. y, degrees from the Research Center for Advanced Studies (CINVESTAV), carrying out his studies at the Mechatronics Division of the Electrical Engineering Department, in Mexico City. Since November 2006, he is Professor at the Division of Applied Research and Academic Degree Programs at the Center for Engineering and Industrial Development (CIDESI) in Querétaro City. México. His main interests are robotics, bilateral teleoperación systems, and haptic interfaces
J. Arturo Velarde-Sánchez received his Eng. degree from University of Guadalajara (in Lagos de Moreno Moreno, Jalisco) in Mechatronics in 2007. He is now a M.S. candidate in Science and Technology w specialty in with Mechatronics at the Center of Engineering and Industrial Development, Queretaro México His México. research interests focus on modeling and robotics.
2021年高考语文高考模拟试题
2021年高考语文高考模拟试题 第I卷(选择题共30分) 一、(12分,每小题3分) 1.下列各组词语中,有两个错别字的一组是 A.会晤明眸皓齿痉孪日臻完善 B.毗邻卑恭屈膝笑靥不卑不抗 C.取缔一语破的矍烁愤世嫉俗 D.挞伐焚膏继晷惬意一蹶不振 2.下列各句中,加红的成语使用恰当的一句是 A.进入高三以来,一向学习成绩平平的陈真特别刻苦,进步很大,真叫人不得不另眼相看。 B.大自然的巧夺天工,造就了如诗如画的美景,置身在这里可以观赏到峥嵘的群峰、莽莽森林、高峡平湖和瀑布的壮美。 C.合理的知识结构应是广博与精专的辩证会,专与博都是相对的,应该相辅相成,协调发展。 D.仿制古画还有一种情形,就是不署姓名,以假乱真,鱼龙混杂,骗取黑钱。 3.下列各句中,没有语病的一句是 A.天安门是中国古代建筑的精华,集中体现了中国古代工匠的智慧,可以堪称世界建筑艺术的精品。 B.事情发生后,厂领导非常重视,立即同党支部研究,决定对这个问题进行一次教育。 C.这种有工人、干部和技术参加的三结合小组是推动技术革新、密切干群联系、促进相互学习的一种重要途径。 D.文化素养的深厚对科学研究是会有好处的,更不用说对人的全面发展了。 4.填入下面横线处的句子,与上下文衔接最恰当的一组是 课外阅读,要提倡学生自选自读,________,________,________,________,________,________,这样自由自在地看才有味道。 ①好比在夏季夜晚看星星②不必提出过于严格的要求③那么多的星星爱看哪颗看哪颗 ④教师的指导只起引路的作用⑤有的可以盯住它仔细琢磨⑥有的可以漫不经心一扫而过 A.②①③⑥⑤④ B.①②④③⑥⑤ C.⑤⑥②④①③ D.④②①③⑤⑥
【中考模拟】2020中考物理模拟试题(含答案) (7)
一、选择题:本题共15小题,每小题2分,共32分。在每小题给出的四个选项中,只有一项符合题目要求的。 1.小明进入考场后,对他身边的物理现象,解释正确的是 A.扇一扇感觉凉快是因为他周围空气的温度降低了 B.矿泉水瓶里的冰块逐渐变为水是液化现象 C.钢尺摸起来比塑料凉,是因为钢尺的导热性能差 D.手机不允许代入考场,是因为手里可利用电磁波传递信息 答案:D 2.2018年5月1日晚,在大雁塔北广场上演了一场水舞光影秀。巨型灯柱阵、多台超高清投影机和音乐喷泉交错配合,使大雁塔隐在光幕之中,美轮美奂,这是中华文化和现代科技的一次完美结合,下列关于这场光影秀的说法不正确的是 A.发光的灯柱是光源 B.光的三原色是红、绿、蓝 C.音乐喷泉形成的水幕对光只有反射作用 D.演出过程中高清投影机可形成逼真的实像 答案:C 3.如图所示的电路中,闭合开关S1、S2,小灯泡L1和L2正常发光,电流表和电压表均有示数,下列关于该电路的说法正确的是 A电流表测量干路中的电流 B电压表不能测量L1两端的电压 C取下L1时,L2正常发光 D只断开开关S2时,电压表有示数
答案:C 4.在高速公路长下坡路端的外侧,常设有如图所示的避险车道,供刹车失灵的车辆自救,当失控车辆冲上该车道时,被强制减速停车,下列说法不正确的是 A.避险车道相当于一个斜面 B.以相同速度行驶时,大货车比小轿车的动能大 C.下坡路段刹车失灵的大货车动能越来越大 D.大货车冲上避险车道时,动能全部转化为重力势能 答案:D 5.如图是一模拟风力发电的模型,电动机通电时,风扇a高速转动产生风力模拟自然风,风扇b在风力作用下带动发电机发电,同时与发电机相连的小灯泡发光,下列说法正确的是 A.电动机转动时把机械能转化为电能 B.发电机是利用电磁感应现象工作的 C.电池电压降低时,风扇a的转速不会改变 D.风力大小不会影响小灯泡发光亮度 答案:B 6.如图所示的不锈钢空调架,安装时横杆OB伸出墙外由斜杆AC支撑,其中O、A两点固定在墙上,C端固定在横杆OB上,通常将空调室外机置于该支架上不靠近墙体,下列说法正确的是
大学英语一模拟题及答案
《大学英语1》模拟考试试卷 1.He realized that his( attitude ) on these matters was wrong. 2.You should take ( advantage ) of this chance and try to make a good impression on them. 3.It seems that they had little in (common) even though they are twin brother. spend know how to (improve) your to without having grades you 4.Do want to more time studying? 5.I don't want to take these shoes mainly because they are too(fancy) for me. achievement high help get (score)on regularly 6.Going over your notes can tests. asleep. fell (comfortable)armchair,my 7.While sitting in the grandfather 8.Words can't (describe) the beauty of the scene. may 9.Nowadays many children pleasant (surroundings) ,which live in the cause some problems. 10.He left school for (economic) reasons. 分,共(每小题择法二、语选题210分)There are five questions and four choices marked A,B,C and D for each question,choose the best answer. 1.There are more __D__ in Bristol than in any other city I know. A. football team B. footballs team 5 / 1 C. footballs teams D. football teams 2.This is the ___B____ leaning tower in Pisa. A. 180-feet-high B. 180-foot-high C. 180-foot high D. 180 foot high
语文语文高考模拟试题
语文语文高考模拟试题(第一部分) 第I卷(45分) 一、(18分,每小题3分) 1.下列词语中红色的字,读音全正确的一项是 A.思忖(cǔn) 摒(bìn)除瞠(chēng)目结舌B.毗(bǐ)邻痉(jìng)挛大吹大擂(léi) C.重创(chuāng) 渐(jiān)染北门锁钥(yuè) D.炽(chì)热龟(jūn)裂韦(wěi)编三绝 2.下列各组词语中,没有错别字的一组是 A.防碍一如继往怨天忧人同病相怜B.申辩无与伦比乌烟瘴气炉火纯青C.舶来品姗姗来迟箭拔弩张合盘托出D.厮杀含贻弄孙不尽情理急不可耐3.依次填入下列各句横线处的词语,恰当的一组是 ①他一腔怒火无从______,他不知该恨那些真正的毒品犯,还是美国的法律,或者是他自己。 ②别看敌人设下了封锁线,但沂蒙山区这么大,五万多敌人分成十路拉网,网上的洞眼也就多了。我们从敌人的________ 冲出去,突围反扫荡一定能成功。 ③尽管已近半百,但长期坚持锻炼,她的________保持得很好,从后面看,还真像是二十几岁的姑娘。 A.爆发结合部体型B.爆发接合部体形C.暴发结合部体形D.暴发接合部体型4.下列各句中,红色的成语使用恰当的一句是 A.她洗过脸,对着镜子重新在脸上敷粉,镜子里的女人依然唇红齿白,但眼角眉梢已经给人以明日黄花之感。 B.沉寂的文坛开始活跃,僵冻的大地万物复苏。文坛上百花齐放的盛景已经屈指可数。 C.对照原片,你会发现新拍片有很大的局限性,演员的表演也差强人意。 D.他们根据那位青年提供的线索,先找到张某,要他供出酒是从哪儿贩来的,再缘木求鱼,终于找到了制造假酒的黑窝。 5.下列各句中,没有语病的一句是 A.我们要贴近受众去进行播讲,要像在家里和自己的亲人、朋友交谈一样,切忌不可以有凛然不可侵犯的装出来的声威,我们不是坐在衙门里升堂的老爷…… B.一个人如果在6岁之前还没有享受到幸福,那他这一辈子恐怕就无法享受到幸福了。这句话听起来有些荒唐,但仔细品味一下,也不是没有道理。 C.不久前我到南京采访,垂询接待我的人,得到的答复是先生健康并且在学术上仍很活跃。 D.可是,郑其带来的消息无疑像在处里投下一颗重磅炸弹,而且整个政治部都像传染了股票病,人心方寸大乱。 6.依次填入横线处的语句,与上下文语意连贯、衔接恰当的一项是 ①鸟和花虽有连带关系, _______________________, 惟有杜鹃确是两者同名,最为难得。 ①住宅的寒伧,_______________________ ,衣料的粗陋,都使她苦恼。 A.①然而花有花名,鸟有鸟名,几乎没有一个是雷同的②黯淡的墙壁,破旧的家具 B.①然而鸟有鸟名,花有花名,几乎没有一个是雷同的②墙壁的黯淡,家具的破旧 C.①然而花有花名,鸟有鸟名,几乎没有一个是雷同的②墙壁的黯淡,家具的破旧 D.①然而鸟有鸟名,花有花名,几乎没有一个是雷同的②黯淡的墙壁,破旧的家具 二、(15分,每小题3分) 阅读下面的文言文,回答7一ll题。 王粲字仲宣,山阳高平人也。献帝西迁,粲徙长安,左中郎将蔡邕见而奇之。时邕才学显著,贵重朝廷,常车骑填巷,宾客盈坐。闻粲在门,倒屣迎之。粲至,年既幼弱,容状短小,一坐尽惊。邕曰:“此王公孙也,有异才,吾不如也。吾家书籍文章,尽当与之。”年十七,司徒辟,诏除黄门侍郎,以西京扰乱,皆不就。乃之荆州依刘表。表以粲貌寝而体弱通侻,不甚重也。表卒,粲劝表子琮,令归太祖。太祖辟为丞相椽,赐爵关内
初中物理中考模拟题(精选)及答案
2015年模拟试题 理科综合 物理部分 本试题共五大题、30小题,满分80分 一、选择题(在每小题给出的四个选项中,只有一项符合题目要求,请选出并写在答题卡上,每小题3分,共30分) 1、小明用身体进行实验时所记录的下列数据中,合理的是( ) A .教室内空气的质量约为100g B .他潜水时所受水的浮力为5000N C .他从教学楼的一楼匀速走到二楼时克服重力所做的功为1500J D .他跑100m 所需的时间约为8s 2、描述水的有关物理量之间关系的图像如下,其中正确的是( ) 3、如图所示的实验现象所揭示的物理原理或规律与对应的技术应用或现象不正确的是( ) 4、物理学中用实验研究三个量(或三个量以上)之间的关系时,常采用控制变量法。下列实验设计不是利用控制变量法的是( ) 5、如图所示是使用简单机械匀速提升同一物体的四种方式(不计机械自重和摩擦),其中所需动力最大的是( ) t /s 0 t /℃ C .水温与加热 时间关系 t/h 0 蒸发量m /kg D .水的蒸发量与 时间关系 V /m 3 0 m /kg B .水的质量与 体积关系 m/ kg 0 G /N A .水的重力与 质量关系 A .研究压力作用的效果 B .研究滑动摩擦力的大小 D .研究平面镜成像的特点 C .研究液体压强的特点
6、下列关于运动的说法正确的是() A.以公路旁的树木为参照物,坐在行驶的客车里的乘客是静止的 B.滑雪时,人从高处自由滑下,速度越来越快,是因为重力势能转化为动能 C.扫地时尘土飞扬的原因是分子的无规则运动造成的 D.在原子的核式结构模型中,所有的电子都在同一轨道上绕着原子核运动 7、如图甲所示,小明用弹簧测力计拉木块,使它沿水平木板匀速滑动,图乙是他两次拉动同一木块得到的距离随时间变化的图像。下列说法正确的是() A.木块两次受到的拉力和摩擦力均相等 B.木块第1次受到的拉力较大 C.木块两次的动能一样多 D.两次拉力对木块做的功一样多 8、同学们在以“假如……”为主题的讨论中,下列四种观点正确的是() A. 假如失去摩擦力,任何物体都不可能处于静止状态 B. 假如没有了空气,声音就一定不能传播 C. 假如失去了重力,天平就不能再用来测量物体的质量 D. 假如没有了大气压强,地面上的物体都会飘向高空 9、将体积相同的实心木球和实心铁球浸没于水中,放手后木球上浮,铁球下沉,静止时它们所受浮力的大小关系是() A. F木=F铁 B. F木<F铁 C. F木>F铁 D. 无法确定 10、目前,“低碳”、“绿色”等词语逐渐成为人们日常生活中谈论的热门话题,各级政府对此高度重视,并采取了一系列措施。下列措施不符合“低碳”、“绿色”要求的是()A. 大力发展风力发电B. 倡导多乘公交车,少开私家车 C. 大力发展火力发电D. 加大对污染企业的减排监管力度 二、填空题(每空1分,共12分) 11、如图所示,重为6N,底面积为0.01m2的圆柱形容器放置在水平桌面上,内装20cm深的水,则水的质量为 Kg,水对容器底的压强为 Pa;水平桌面受到的压强为 Pa。(g取10N/kg) 12、如图所示,小芳在做“探究影响滑动摩擦力大小因素”的实验时,操作的错误是。 13、工人用如图所示的滑轮组将一重400N的物体匀速提起,若滑轮组的机械效率为80%,忽略一切摩擦及绳的伸长,则拉力的大小是 N;若使用该滑轮组提升600N的重物,其机械效率将(选填“变大”、“变小”或“不变”)。 14、有质量相等的A、B两个物体,已知A的比热容大于B的比热容,当它们吸收相等热量后,A升高的温度 B升高的温度;某汽车散热器中装有5 kg的水,在温度升高20℃的过程中,水吸收的热量是 J。[水的比热容为4.2×103J/(kg.℃)] 15、如图所示,火柴头在火柴盒上轻轻划过就能擦燃,是通过________的方式实现的。 16、截至目前,中国第一大地热发电站西藏羊八井地热电站已累计发电超过24亿千瓦时.分析右图,从地下井→汽轮机→发电机,其能量转化过程是:内能→能→能;地热能属于 (选填“可再生”或“不可再生”)能源。 三、作图与简答(每小题2分,共6分) 17、“远征号”潜水艇在东海执行完任务后返回到长江某基地, 请在图中画出潜水艇加速上11题16题 15题 13题 12题
2010年广东中考数学试题及答案
机密☆启用前 2010年广东中考数学试题及答案 说明:1.全卷共4页,考试用时100分钟,满分为120分. 2.答卷前,考生务必用黑色字迹的签字笔或钢笔在答题卡填写自己的准考证号、姓名、 试室号、座位号.用2B 铅笔把对应该号码的标号涂黑. 3.选择题每小题选出答案后,用2B 铅笔把答题卡上对应题目选项的答案信息点涂黑, 如需改动,用像皮檫干净后,再选涂其他答案,答案不能答在试题上. 4.非选择题必须用黑色字迹钢笔或签字笔作答、答案必须写在答题卡各题目指定区域 内相应位置上;如需改动,先划掉原来的答案,然后再写上新的答案;不准使用铅笔和 涂改液.不按以上要求作答的答案无效. 5.考生务必保持答题卡的整洁.考试结束时,将试卷和答题卡一并交回. 一、选择题(本大题5小题,每小题3分,共15分)在每小题列出的四个选项中,只有一个是正确 的,请把答题卡上对应题目所选的选项涂黑. 1.-3的相反数是( ) A .3 B . 3 1 C .-3 D .13 - 2.下列运算正确的是( ) A .ab b a 532=+ B .()b a b a -=-422 C .()()22b a b a b a -=-+ D . ()222 b a b a +=+ 3.如图,已知∠1=70°,如果CD ∥BE ,那么∠B 的度数为( ) A.70° B.100° C.110° D.120° 4.某学习小组7位同学,为玉树地震灾区捐款,捐款金额分别为5元、6元、6元、7元、8元、 9元,则这组数据的中位数与众数分别为( ) A .6,6 B .7,6 C . 7,8 D .6,8 5. 左下图为主视方向的几何体,它的俯视图是( ) 二、填空题(本大题5小题,每小题4分,共20分)请将下列各题的正确答案填写在答题卡相应
北语 大学英语(二)模拟试卷和答案
《大学英语(二)》模拟试卷一注意: 1.试卷保密,考生不得将试卷带出考场或撕页,否则成绩作废。请监考老师负责监督。 2.请各位考生注意考试纪律,考试作弊全部成绩以零计算。 3.本试卷满分100分,答题时间为90分钟。 4.本试卷分为试题卷和答题卷,所有答案必须答在答题卷上,答在试题卷上不给分。 I.Multiple Choice. (2 points for each, altogether 40 points) Directions:There are 20 sentences in this section. Beneath each sentence there are four choices respectively marked by letters A, B, C and D. Choose the word that you think best complete the sentence. Write your answers on the answer sheet. 1. Studies have shown _______ teenagers often suffer from depression. [A] that[B] which[C] in which[D] in that 2. The party has failed to _______ the majority of voters that it is capable of governing the country. [A] trust[B] credit[C] convince[D] believe 3. Many of us visited the industrial exhibition, __________, to our disappointment, we saw very few high-tech products. [A] where[B] which[C] as[D] that 4. The kids are _______ be hungry when they get home. [A] obliged to[B] bound to[C] desired to[D] motivated to 5. All the characteristics that distinguish birds _______ other animals can be traced to prehistoric times. [A] to[B] between[C] for[D] from 6. Management often works hard to set up a situation work is done in series. [A] that[B] where[C] which[D] what 7. If we _______ everything ready by now, we should be having a terrible time tomorrow.
高考语文模拟试题
咼考语文模拟试题(含答案) 第I卷(选择题共42 分) 一、(18分,每小题3分) 1.下列词语中加点的字的读音完全相同的一组是 A.清澈覆辙撤除风驰电掣天寒地坼 B.饯别践约兽槛剑拔弩张前车之鉴 C.蓦然膜拜抹杀漠不关心秣马厉兵 D.缜密箴言甄别臻于致治忠贞不渝 2.下列词语中没有错别字的一组是 A . 荟萃致理名言步入正规大坝合龙 B . 申张梦寐已求优柔寡断分内之事 C.信笺犄角之势绵里藏针粮食歉收 D.撕打心猿意马文过饰非人间心酸 3?依次填入下列各句横线处的词语,最恰当的一组是 (1)_________________________________________________________ ?由于拥有巨大的财富,犹太人牢牢地在美国主流社会中__________________________________ 着重要一席,直接影响 甚至左右着美国历届政府的中东政策。 (2)?在今年抗击非典斗争中,许多年轻的恋人因为工作需要_分开,原定的婚礼被推 迟。 (3).目前中小学生的课外活动并不十分充足,但仍然让他们期待,_课外活动使孩子 们的业余生活变得更有意义了。 (4)?完颜阿骨打(金朝的开创者)一生驰骋疆场,为女贞族的统一与发展建立了不朽的_。A.占有暂且终究功绩B. 占据暂时毕竟功勋 C.占有暂时毕竟功绩 D. 占据暂且终究功勋 4.下列句子中标点符号的使用,正确的一句是 A.细细的秋雨——大约是今年的最后一场雨了吧——在窗外静静地飘洒着。 B.写什么景?怎样写景?为什么写景?是我们阅读分析散文时应注意的问题。 C.“黯然销魂者,唯别而已矣,”谣想古人送别也是一种雅人深致。 D.抓住学习的四个环节,(预习、听讲、复习、作业)是提高学习成绩的有效途径。 5.下列各句中加点的成语使用不恰当的一句是 A.在第七届农运会开幕式上,各民族运动员跳起特色不同的、风情各异的舞蹈或表演富 有特色的文体节目,令人耳目?一新..。
中考物理模拟试题(有答案)
2019年中考物理模拟试题(有答案) 中考复习最忌心浮气躁,急于求成。指导复习的教师,应给学生一种乐观、镇定、自信的精神面貌。要扎扎实实地复习,一步一步地前进,下文为大家准备了2019年中考物理模拟试题。 选择题(每小题2分,共28分) 1.下列物态变化过程中,属于吸热过程的是( ) A.春天,冰雪消融 B.初夏,白雾弥漫 C.深秋,果实挂上了白霜 D.严冬,水面结起了冰 2.关于温度、内能、热量三者的关系,下列说法正确是( ) A.温度高的物体,内能一定大 B.物体温度升高,一定是吸收了热量 C.物体吸收了热量,温度一定升高 D.物体温度升高,内能一定增大 3.下列做法是为了加快液体蒸发的是( ) A.酒精灯不用时要盖上灯帽 B.洗头后用电吹风把头发吹干 C.农业灌溉中用管道输水代替沟渠输水 D.蔬菜用保鲜膜包好后放入冰箱冷藏室 4.用丝绸摩擦过的玻璃棒去靠近由细线吊着的轻质小球时,产生了互相排斥的现象,则该小球( ) A.可能带正电,也可能不带电 B.一定带正电 C.可能带电负,也可能不带电 D.一定带负电
5.下列属于做功改变物体内能的是( ) A.用煤烧水、做饭 B.棉被被太阳晒热了 C.钻木取火 D.铁匠把烧红的铁块浸入水中使铁块变冷 6.下列关于比热容的说法正确的是( ) A.比热容跟吸收或放出的热量有关 B.比热容跟温度有关 C.质量越大,它的比热容越大 D.比热容是物质本身的属性,与温度、质量无关 7.下列现象中,不属于摩擦起电的是( ) A.在干燥的天气中脱毛衣时,会听到啪啪声 B.用塑料梳子梳干燥的头发,越梳越蓬松 C.吸尘器能够把地上的碎纸屑吸起来 D.用干燥的毛刷刷毛料衣服时,毛刷上吸附许多脏物 8.关于家庭用电,下列说法中不正确的是( ) A.家庭电路发生短路,容易酿成火灾。 B.开关用绝缘材料包裹,即使湿手也可以触摸开关。 C.空气开关跳闸后,要排除故障后再将空气开关复位。 D.测电笔中氖管发光时,有微弱电流通过人体。 9.如图所示的电蚊拍,具有灭蚊和照明等功能。当开关S1闭合、S2断开时,只有灭蚊网通电起到灭蚊作用;当开关S1和S2都闭合时,灭蚊网与灯都通电同时起到灭蚊和照明作用。下列电路设计符合这种要求的是( ) 10.对于欧姆定律导出公式,下列说法中正确的是( )
2010年中考数学试题(word版)(含答案)
2010数学测试卷 第 Ⅰ 卷 一、 选择题 1 . 13-= ( ) A. 3 B-3 C 13 D-13 2.如果,点o 在直线AB 上且AB ⊥OD 若∠COA=36°则∠DOB 的大小为 ( ) A 3 6° B 54° C 64° D 72° 3.计算(-2a 2)·3a 的结果是 ( ) A -6a 2 B-6a 3 C12a 3 D6a 3 4.如图是由正方体和圆锥组成的几何体,他的俯视图是 ( ) · A B C D 5.一个正比例函数的图像过点(2,-3),它的表达式为 ( ) A 32y x =- B 23y x = C 32y x = D 23 y x =- 6.中国2010年上海世博会充分体现“城市,让生活更美好”的主题。据统计5月1日至5月7日入园数(单位:万人)分别为20.3,21.5,13.2,14.6,10.9,11.3,13.9。这组数据中的中位数和平均数分别为 ( ) A 14.6 ,15.1 B 14.65 ,15.0 C 13.9 , 15.1 D13.9 , 15.0 1102 x -≥ 7.不等式组 的解集是 ( ) 3x+2>-1 A -1< x ≤2 B -2≤x <1 C x <-1或x ≥2 D 2≤x <-1 8.若一个菱形的边长为2,则这个菱形两条对角线的平方和为 ( ) A 16 B 8 C 4 D 1
9.如图,点A 、B 、P 在⊙O 上的动点,要是△ABM 为等腰三角形,则所有符合条件的点M 有 ( ) A 1个 B 2个 C 3个 D 4个 10.将抛物线C :y=x 2+3x-10,将抛物线C 平移到C ˋ。若两条抛物线C,C ˋ关于直线x=1对称,则下列平移方法中正确的是 ( ) A 将抛物线C 向右平移52个单位 B 将抛物线 C 向右平移3个单位 C 将抛物线C 向右平移5个单位 D 将抛物线C 向右平移6个单位 第Ⅱ卷(非选择题) 二、 填空题 11、在1,-2,-3,0, π五个数中最小的数是 ___ 12、方程x 2-4x 的解是 _________ 13、如图在△ABC 中D 是AB 边上一点,连接CD ,要使△ADC 与△ABC 相似,应添加的条件是 _________________________________ 14、如图是一条水铺设的直径为2米的通水管道横截面,其水面宽1.6米,则这条管道中此 时最深为 _______ 米 15、已知A(x 1,y 2),B(x 2,y 2)都在6y x =图像上。若x 1 x 2=-3则y 2 y 2的值为 _____ 16、如图,在梯形ABCD 中,DC ∥AB ,∠A+∠B=90°若AB=10,AD=4,DC=5, 则梯形 ABCD 的面积为 _______ 三、解答题 17.化简222m n mn m n m n m n -+-+-
大学英语模拟试题及答案(2020年整理).doc
大学英语模拟题 1、One of my teeth is so ______ that it is going to be missing soon(2)() A.lose B.loose C.loss D.lost 标准答案:B 2、—How about taking a walk? —Oh, I think it’s ______ cold for a walk (2)() A.very much B.too much C.much too D.so much 标准答案:C 3、You are supposed to write your composition every ______ line.(2)() A.one B.a
C.other D.another 标准答案:C 4、After living for years in a big city, they found it difficult to settle ______ in a town.(2)() A.for B.at C.up D.down 标准答案:D 5、The reason for my absence was ______ I had fallen ill.(2)() A.why B.because C.for D.that 标准答案:D 6、This is the university ______.(2)() A.at which do we study B.we are studying
C.we are studying at D.where we study at 标准答案:A 7、It was in this house ______ the important meeting in history was held.(2)() A.where B.that C.which D.in which 标准答案:B 8、She looked so honest that we all regarded her story ______.(2)() A.like true B.as true C.like real D.as real 标准答案:B 9、Mrs. Brown as well as her children ______ to go Paris on holiday next
2020年中考物理模拟试卷及答案
2020年中考物理全真模拟试卷 一、单选题 1.(3分)甲同学把耳朵贴在长铁管的一端,乙同学在另一端敲一下铁管,甲同学听到两次响声。这是因为() A.有回声 B.声音在空气中传播的速度比在铁中的大 C.由于声音的折射 D.声音在铁中传播的速度比在空气中的大 2.(3分)如图所示电路,当小灯泡发生短路时,开关闭合后移动滑动变阻器滑片,电路中出现的现象是() A.小灯泡不亮 B.电压表示数接近电源电压 C.电流表的示数为零 D.小灯泡亮度不断发生变化 3.(3分)图甲所示的是中国科技馆“模拟避雷针”的实验展台。当参与者按下“有避雷针”按钮时,从高压发生器尖端涌出的白色闪电,会径直劈向大楼模型顶部的避雷针上,大楼不会受到任何影响;当参与者按下“无避雷针” 按钮时,避雷针收缩到大楼内部,白色闪电劈向大楼,大楼内部泛起红光,燃起“熊熊大火”,如图乙为上述情景的示意图。下列说法中正确的是()
A.制作避雷针的材料为绝缘体 B.云层放电时创造了电荷 C.图乙中闪电发生时,与避雷针相连的金属线中的电流方向是从避雷针指向云层 D.高压发生器模拟云层放电时,云层失去了原子核,带上了负电4.(3分)一些公共场所安装的电子监控器如图所示。它们主要由两部分组成,一部分为光学摄像系统,另一部分为光电转换系统,摄像系统收集监控区域内景物清晰成像的信息,光电转换系统把光信号转换成电信号,输送到监控中心,实现间接监控的目的。下列对摄像系统部分的说明中,正确的是() A.摄像系统能拍摄一个实像 B.镜头采用的是凹透镜 C.透镜的焦距可能是10m D.摄像系统能拍摄到一个正立放大的虚像 5.(3分)如图所示的电路图中,下列说法正确的是()
2010年中考试题集锦---菱形
选择题(每小题x 分,共y 分) (2010?南通)8. 如图,菱形ABCD 中,AB = 5,∠BCD = 120°,则对角线 AC 的长是 A .20 B .15 C .10 D .5 (2010?南京)5.如图,在平面直角坐标系中,菱形OABC 的顶点坐标是(3,4)则顶点A 、B 的坐标分别是 A. (4,0)(7,4) B. (4,0)(8,4) C. (5,0)(7,4) D. (5,0)(8,4) (2010?广东省肇庆市)10.菱形的周长为4,一个内角为60 ,则较短的对角线长为( C ) A .2 B . 3 C .1 D .2 3 (2010?连云港)7.如图,四边形ABCD 的对角线AC 、BD 互相垂直,则下列条件能判定四边形ABCD 为菱形的是( ) A .BA =BC B .A C 、B D 互相平分 C .AC =BD D .AB ∥CD (2010?江苏盐城)6.如图所示,在菱形ABCD 中,两条对角线AC =6,BD =8,则此菱形 的边长为A A .5 B .6 C .8 D .10 A B C D (第6题) B A C D (第8题)
(2010?湖北省咸宁)8.如图,菱形ABCD 由6个腰长为2,且全等的等腰梯形镶嵌而成, 则线段AC 的长为D A .3 B .6 C . D . (2010?天津)(6)下列命题中正确的是D (A )对角线相等的四边形是菱形 (B )对角线互相垂直的四边形是菱形 (C )对角线相等的平行四边形是菱形 (D )对角线互相垂直的平行四边形是菱形 (2010?北京)4. 若菱形两条对角线的长分别为6和8,则这个菱形的周长为 (A) 20 (B) 16 (C) 12 (D) 10。 (2010?怀化)7.如图2,在菱形ABCD 中, 对角线AC=4,∠BAD=120°, 则菱形ABCD 的周长为( C ) A .20 B .18 C .16 D .15 ( 2010?陕西省)8.若一个菱形的边长为2,则这个菱形两条对角线的平方和为 (A ) A 16 B 8 C 4 D 1 (2010?兰州市)11. 如图所示,菱形ABCD 的周长为20cm ,DE ⊥AB ,垂足为E ,sin A=53 , 则下列结论正确的个数有C ① cm DE 3= ②cm BE 1= ③菱形的面积为215cm ④cm BD 102= A . 1个 B . 2个 C . 3个 D . 4个
2020最新语文高考模拟试卷及答案
第Ⅰ卷(阅读题) 甲必考题 一、现代文阅读(9分,每小题3分) 阅读下面的文字,完成1—3题。 不久前,美国波士顿马萨诸塞州立大学医学中心的研究人员利用珊瑚作“模子”,用患者的细胞培育出大拇指骨并最终培植出新的大拇指。这一惊人的突破令医学界大为振奋。科学家们相信,在不久的将来,这项技术使他们能够培植出包括心瓣、肝脏及乳头等更为复杂的人体器官和组织,以供人类作器官移植之用。 患者莫尔西亚的大拇指在一次意外中被压断。为他治疗的舒费尔巴吉医生将他的断指的残余部分植在他的胸部,以让拇指的皮肉组织继续生长。与此同时,细胞工程专家瓦卡迪为他培育新的拇指骨。这一过程如同科幻小说中的情节,科学家先将珊瑚雕成拇指形状的模子,并在里面钻了许多细小的孔,然后从莫尔西亚手臂取出骨细胞,同一种从海藻中提炼出来的化合物钙褐藻胶一起塞进珊瑚模的蜂巢孔内。骨细胞在珊瑚的滋润下逐渐成型,而珊瑚最后则自然解体,留下由其培植而成的指骨。此后,医生将培植出的指骨接到莫尔西亚的掌上,并在指骨的外部铺上拇指的皮肉组织。医生们
下一步要做的,是用患者的耳朵上的细胞来培植他的手指关节组织。 虽然研究人员尚不知这项试验最后是否能取得成功,但仅现在所取得的进展便已令人鼓舞不已了。他们预计,在未来的二三十年内,科学家将能培育出任何人体器官。实际上在此之前,瓦卡迪和另一位细胞工程专家兰格一起,在老鼠的背上成功培植出一只人类的耳朵。 这些实验成功之后,医学中心的研究人员又在动物身上成功进行了二十多项培植或移植器官及组织的试验。这些实验包括大动脉、心瓣、腱和韧带、乳头及部分气管。与此同时,哈佛大学的一位科学家也曾从绵羊胎儿身上抽出膀胱细胞,在实验室内进行培植,然后在小绵羊出世后植入其体内。科学家相信,人工培植的真骨,将在未来取代伤残人的塑料或金属假肢。而用电脑绘制出来的“模子”,将能够保证人工培育出来的器官同原来的一模一样。马萨诸塞州立大学医学中心的研究人员相信,在不久的将来,他们能够在实验室中培育乳房、眼角膜和人的手脚四肢。到那时,患者将不再担心无人捐献器官,而且,由于新的器官是由自身细胞培育而出,因此在移植到患者身上之后,不用担心人体免疫系统所产生的排斥。 1.下列对第一段中“这项技术”的理解,最准确的一项是()
(完整word版)人教版初中物理中考模拟试题
初中物理中考模拟试题 一、选择题(每小题3分,共计30分) 1、关于声音的说法正确的是() A、物体只要振动,人们就能听到声音 B、声音只能通过介质传播 C、声音在一切介质中的传播速度都是相同的 D、声音中,人们听不见的声音只有超声波 2、下列关联正确的是() A、光的直线传播——把铅笔斜插入盛水的玻璃杯中,看上去好像折断了 B、光的折射——岸边的树倒映在水中 C、光的反射——影子的形成 D、光的反射——人能在镜中看见自己的像 3、早晨,往往能在草叶上看见晶莹的露水珠儿,它是通过下列哪种物态变化形成的() A、熔化 B、液化 C、凝华 D、蒸发 4、下列选项中,工作时把机械能转化为电能的是() A、电流表 B、电能 C、电动机 D、发电机 5、下列物体不需要从外界接收电磁波就能工作的是() A、录音机 B、收音机 C、无绳电话 D、手机 6、如图1所示,符合安全用电原则的是() A B C D 7、下列事例中,能避免惯性产生的危害的是() A、离垃圾箱一段距离扔果核,果果核也能飞进垃圾箱 B、让磁体离铁屑有一段距离,也能把铁屑吸引过来 C、行驶的汽车离障碍物一段距离,就要提前刹车 D、运动员跳远 8、如图2是研究杠杆平衡条件的实验装置,要想使杠杆 平衡,A处钩码应挂() A、1个 B、2个 C、3个 D、6个 9、下列说法错误的是() A、现阶段,人类所用能量,大部分来源于燃料燃烧 B、燃料燃烧时化学能转化为内能 C、热值是表示燃料燃烧放热能力的物理量 D、汽车在行驶时,发动机把油料中的化学能全部转化成有用的机械能。 10、两盏白炽灯,甲标有“PZ220V 40W”,乙标有“PZ220V 25W”,比较它们的亮度,下列说法正确的是() A、甲一定比乙亮 B、乙一定比甲亮
2010年中考试题
三、综合阅读(共三节,计34分) 第一节综合知识(共6小题;每小题1分,满分6分) 根据所掌握的文化或背景知识,选择最佳选项。 61. Kate King is an English teacher. She married Jack Brown. Then her students can call her _______________. A. Mrs King B. Mrs Brown C. Teacher King D.Miss King 62. When we visit Tibet, We can see____. A. Jokhang Temple B. Shaolin Temple C. Heaven Temple D. Mazu Temple 63. Vincent van Gogh was a(n)____painter. A. Dutch B. Italian C. English D. German 64. The World Cup is being held in South Africa now.____ is one of the cities in South Africa A. Washington B. Ottawa C. Toronto D. Cape Town 65. What’s the mascot of 2010 Shanghai Expo? 66. Families usually celebrate a good harvest together on ____ in the US. A. Christmas B. Easter C. Thanksgiving D. Halloween 第二节阅读理解(共7小题;每小题2分,满分14分) 阅读下面两篇短文,根据短文内容,选择最佳选项。 (1) The waterbuck is a kind of kind animals. All male waterbucks have horns, which may be big or small. Waterbucks use their horns when fighting and defending themselves. Zebras have strong bodies and long, straight legs that are good for running. Zebras help one another to look and listen for danger. If one zebra sees a lion, it makes a loud noise to warn the others. A zebra can run faster than a lion unless it is caught by surprise. No two zebras have exactly the same stripes(条纹). Cheetahs can run as fast as seventy-five miles an hour. Strong claws(爪子)on the cheetah's feet help it to hold the ground when it is running fast. Powerful back legs help it jump forward. A meerkat makes its home in an underground hole. When a group of meerkats goes out for food, one of them acts as a sentry and looks out for larger animals.1f it notices danger, it calls out a warning, and all the meerkats run back to the hole. 67.A zebra's long and straight legs help it to____. A dig holes B. defend itself C. run fast D. find food 68. The two animals which help warn others if danger are the . A. meerkat and zebra B. zebra and waterbuck C. meerkat and cheetah D. cheetah arid waterbuck 69. What’s unusual about zebras according to the passage? A. Male zebras can run at seventy-five miles an hour. B. Zebras hide from larger animals in a hole. C. No zebra has the same stripes as any other zebra.
大学英语网考试题及答案doc资料
大学英语网考试题及答案 大学英语B统考模拟试卷及参考答案一 第一部分交际英语 1.— Would you mind helping me to get it upstairs? — _____ A. Yes, it is. B. No, it isn't. C. Sure. D. No, of course not. 正确答案:D 题目解析:译文:你能帮我把它拿到楼上去吗?解析:A是的,它是。B不,它不是。C当然。D不,当然不介意。所以根据题意正确答案为D 2.— Is this beautiful? — _____ A. Yes, rarely have I seen this before. B. Yes, I need a rest. C. No, tomorrow will be fine. D. No, the work should be done by him. 正确答案:A 题目解析:译文:这个好看吗?解析:A是的,我之前很少看到过这么好看的。 B是的,我需要休息。C不,明天就可以。D不,这项工作需要由他来完成。根据题意正确答案为A。 3.― _____ ― An accident has happened. A. Where was the accident? B. What happened? C. When was the accident? D. Why did it happen? 正确答案:B 题目解析:译文:一场事故发生了。解析:答案A这场事故在哪儿?答案B发生什么事情了啊?答案C这个事故什么时候发生的啊。答案D为什么会发生啊?根据回答表示问的是发生什么了,正确答案选B。 4.― Excuse me, how soon does this train leave? ― _____ A. It leaves every half an hour. B. It leaves in ten minutes. C. The next trains leaves at ten. D. There is one at four. 正确答案:B
- 2010年中考数学模拟试题及答案(10)
- 2010年中考模拟卷科学试题卷
- 2010年中考英语模拟试题及答案
- 2010年中考模拟试题(五)
- 2010年中考模拟试题数学试题卷.
- 2010年中考数学模拟试题及答案(1)
- 2010年中考模拟试卷 数学卷
- 2010年人教版初中生物中考模拟试卷(一)
- 2010年语文中考模拟试卷(一)
- 2010年中考数学模拟试题及答案.pptx
- 2010年中考数学模拟试题及答案(12)
- 2010中考模拟试卷 数学试题卷参考答案
- 2010年中考模拟试题卷
- 2010年中考数学模拟试题及答案(6)
- 2010年上海化学中考模拟试题卷
- 2010中考数学模拟试题
- 2010年中考模拟试卷分类汇编——作文
- 2010年中考模拟考试 数学试题卷
- 2010年百色市中考英语模拟试题2
- 2010年中考模拟试卷试题卷