可穿戴骨骼服的发展与应用

1.1.1在可穿戴的两个机器人之间互动
可穿戴机器人的主要特色方面是在他们与人类互动时具有内在的双重认知性和物理性。一方面,在人类与机器人互动时,机器人起到重大作用,那就是给那些因自然灾害或疾病或外伤的人补充能量,并帮助他们战胜人类本身的极限(阿拉米等,2006)。在人类与机器人互动时,涉及到净功率通量问题。另一方面,在人类的认知与机器人互动时还有一个重要作用,那就是使人类认识到在所有时间里允许人类继续控制机器人时,机器人带来的效果一切皆有可能。在这里,认知这个词暗示了认知与人类大脑的组成的高级功能的过程的密切关系,这包括理解,使用语音、视觉感知和施工的过程,还包括计算能力,注意信息加工,记忆和执行的功能,如规划、解决问题、自我检测和对电机控制的看法。
人类的物理性与机器人的互动和人类的认知与机器人的互动都需要得到人类与机器人的互动的支持。而这种支持的接口是由硬件和软件连接两个不同系统的链接,如机器人和人类。据说两个设备在工作时,他们的接口是要链接到扫描,机械和电子的方式。在可穿戴机器人方面,接口是链接到可支持互动的链接而且是通过控制机器人和人类之间的信息流动或电源。
可穿戴机器人,人类认知与机器人的接口是在机器人和人类之间的认知互动的信息流动可能是双向流动,这需要得到发达国家的支持。信息是经过加工、处理和组织数据的,因此人类认知与机器人的互动在人类的机器人的方向是基于一组传感器获得的数据来衡量生物电和生物力学的变量。同样的,这在机器人-人类的方向可能是基于生物力学的变量,生物变量的一个子集,例如,神经电图和自然感知方式,再如视觉和听觉。
同样的原理,当人类的物理性和机器人在互动时,两个人之间的能量流动,也是需要得到发达国家的支持,人类物理性的机器人是基于一组制动器和刚性结构,既是一种用于针对人类骨骼系统的传输。要关闭这种物理性的交流,则必须通过此窗口在可穿戴机器人上实施严密的条件以至于达到安全性和可能性。
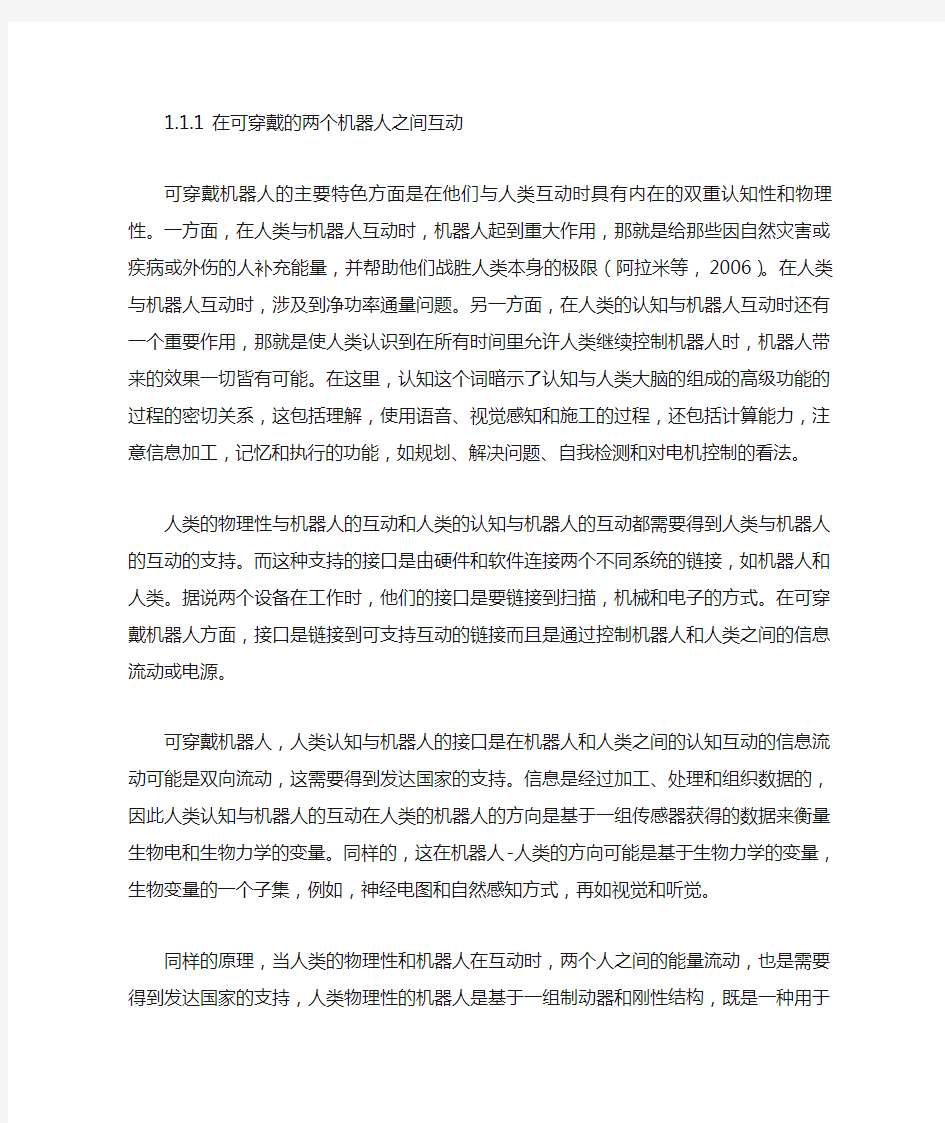
认知性和物理性的互动不是独立的。一方面,在人类进程中,人类的感性认知是可以通过物理触动来与机器人交流的。举一个例子,可穿戴机器人的身体与操作者的互动来提供在虚拟或远程物体上的触觉信息,因此,操作者可以感觉得到这物体是软还是硬的(见图1.2)。另一方面,认知互动可以用于修改人类和机器人之间的物理性互动,例如,改变骨骼的法规遵从性。再有个例子,是地震共舞的现象,这种现象是基于骨骼与人类的互动
:发生震动中可以推断出来肢体运动的认知过程的生物力学的数据,而这是用于修改生物力学特性的人类肢体的阻碍和明显的惯性,从而引发震动减少。
在这方面,认知互动的有意识或无意识而导致了人类与机器人的身体互动。
人体下肢外骨骼仿生
人体下肢外骨骼机理分析 xx (xx,xxxx,xxxx) 摘要:本论文研究穿戴型下肢外骨骼机器人机构。所研究的外骨骼是一种可以穿戴于人体的机械装置。这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的远行、负重等任务。这种外骨骼也可以用来检测人体运动信息,作为康复医疗器械使用。下肢穿戴外骨骼机器人是一种具有双足步行特征的典型的人机一体化系统。 关键词:穿戴外骨骼;助力机器人;机构设计;仿真分析 ANALYSIS AND DESIGN OF LOWER EXTREMITY EXOSKELETON (Mechanical Manufacturing and Automation.,No.:xxxxxxxx,Email:xxxxxxxx@https://www.wendangku.net/doc/e013648457.html,, phone:xxxxxxxxxxx) Abstract:This paper researched a kind of wearable lower extremity exoskeleton robot. The exoskeleton is a mechanism which could match the human body. It relied on human motion information to control the robot, and accomplish the travel, loading and other tasks that can not be completed by people's own capacity lonely. The exoskeleton can also be used to detect human motion information, and as the rehabilitation of medical devices. Lower extremity exoskeleton robot is a kind of typically man-machine integrated system with some biped walking robots’ characters. Keywords:Wearable exoskeletons; Assist robot; Mechanical design; Simulation and Analyze 1引言(Introduction) 外骨骼是一种给人穿戴的人机一体化 智能机械装置,它将人类的智力和机械装置的“体力”结合在一起,靠人的智力来控制机械装置,通过机械装置来完成仅靠人的自身能力无法单独完成的任务。下肢外骨骼是一种用来辅助人们行走的人机系统,它将人和两足步行机器人结合在一起,利用人的运动控制能力来控制机器人的行走,简化了自主行走式两足机器人最为常见的步态规划 和步态稳定性问题,同时它又为人类的行走提供动力协助,增强人类行走的能力和速度,特别是能够缓解人在大负重和长时间行走 情况下极易出现的疲劳感,大大扩大人类的运动范围,能够增强个人在完成某些任务时的能力。人体下肢外骨骼作为单兵系统的一部分,起到了提高士兵承载能力的作用,避免了士兵由于沉重负荷而导致的身体机能 的下降,从而提高了士兵的抵抗能力,对最终提高士兵的战斗力和生存力起到了重要 作用。故可用于军事、科考、旅游、交通等各方面,具有广泛的应用前景。 2人体外骨骼的研究背景(The background of exoskeletons) 人体下肢外骨骼机器人成为机器人领域的一个热门分支,已越来越受到学术界和工业界关注。目前,国外特别是美国、日本在这方面已经取得了巨大的进展,并逐步商业化,成为新兴产业。但国内仅有少数科研单位从事可穿戴助力机器人的研究,起步较晚,基本处在实验室试制阶段,离实用还有一定的距离。
可穿戴式下肢康复外骨骼机器人步态规划及仿真
第23卷 第10期 长 春 大 学 学 报 Vol.23 No.10 2013年10月JOURNAL OF CHANGCHUN UNIVERSITY Oct.2013 收稿日期:2013?09?18 作者简介:谢海胜(1986?),男,河南周口人,硕士研究生,主要从事机械制造及其自动化方面研究三 陈岱民(1962?),男,吉林长春人,教授,博士,主要从事机械设计及理论方面研究三 可穿戴式下肢康复外骨骼机器人步态规划及仿真 谢海胜1,陈岱民2 (1.长春理工大学 机电工程学院,长春 130022;2.长春大学 机械与车辆工程学院,长春 130022) 摘 要:通过分析人的下肢各关节的特征及自由度,设计可穿戴式下肢康复外骨骼机器人结构,利用CAD 软件solidworks 进行三维建模三为了实现可穿戴式下肢康复外骨骼机器人稳定行走功能,本文运用零力矩点(ZMP )判断依据进行步态规划三在机器人进行步态规划时采用三次样条插值法得到可穿戴式下肢康复外骨骼机器人各关节的平滑运动轨迹,同时,摆动腿在运动过程中脚底与地面始终平行三最后在ADAMS 软件中建立可穿戴式下肢康复外骨骼机器人的虚拟样机进行运动学仿真三 关键词:可穿戴式下肢康复外骨骼机器人;步态规划;ADAMS 中图分类号:TP242.3 文献标志码:A 文章编号:1009-3907(2013)10-1224-060 引言 可穿戴式下肢康复外骨骼机器人,是能够帮助下肢残疾或下肢瘫痪患者像正常人一样行走的人机一体化系统三近年来,因交通事故而造成下肢肢体损伤的人数越来越多,社会人群正在进入老龄化三因此,可穿戴式下肢康复外骨骼机器人的研究对于支持残疾人事业具有现实的意义,并将产生明显的社会效益三 步态规划是可穿戴式下肢康复外骨骼机器人能够实现稳定行走的一个重要组成部分三目前基于零力矩点(Zero Moment Point)进行步态规划常用到两种方法:第一种方法是先规划出期望的ZMP 轨迹,然后再确定可穿戴式下肢康复外骨骼机器人腿部各关节的运动;第二种方法是根据双足和重心的运动轨迹来确定ZMP 轨迹三本文采用第一种方法来完成可穿戴式下肢康复外骨骼机器人的步态规划三这种方法只要求出各关节运动轨迹,就能满足ZMP 轨迹的要求三基于可穿戴式下肢康复外骨骼机器人的研制困难这一特点,在建立物理样机之前有必要先进行虚拟样机运动学仿真,以验证步态规划的正确性三本文采用CAD 软件soild?works 和动力学分析软件ADAMS 联合建立虚拟样机三在此基础上进行步态仿真,证明步态规划的可行性三1 可穿戴式下肢康复外骨骼机器人整体系统设计 可穿戴式下肢康复外骨骼机器人,是一种运用于下肢瘫痪二腿外伤二脊柱外伤等腿部运动功能障碍患者的人工外骨骼三主要包括:髋关节二膝关节二踝关节和驱动装置三为了实现其可穿戴性的要求,可穿戴式下肢康复外骨骼机器人被设计成包含14个自由度,即每条腿包含7个自由度,髋关节和踝关节分别包含3个自由度(绕额状轴的屈伸运动二绕矢状轴的外展/内收运动二绕垂直轴的旋转运动),膝关节包含一个自由度(绕额状轴的屈伸运动)三由于患者的身高不同,其大腿二小腿二腰部及踝关节和脚底板之间连接板的长度设计成可调节的三 人体在前向运动时,主要由髋关节二膝关节二踝关节的屈伸运动来完成,维持前向运动的平衡性由髋关节和踝关节绕矢状轴的外展/内收运动来完成,因此需要在这些自由度上安装驱动装置三在其余两个自由度上安装弹簧阻尼,目的是患者在行走过程中受到外力作用时,这两个自由度旋转有利于维持下肢平衡,外力消失时,又回到原来的位置三可穿戴式下肢康复外骨骼机器人系统结构如图1所示: 2 步态规划 2.1 ZMP 稳定性判断依据ZMP(Zero Moment Point)是可穿戴式下肢康复外骨骼机器人所受的重力二惯性力和地面反作用力三者
适合可穿戴设备的图形处理器发展现状 和发展趋势
Open Journal of Circuits and Systems 电路与系统, 2015, 4(3), 47-54 Published Online September 2015 in Hans. https://www.wendangku.net/doc/e013648457.html,/journal/ojcs https://www.wendangku.net/doc/e013648457.html,/10.12677/ojcs.2015.43007 State of the Art and Development of Wearable Computer Graphics Processing Unit Jiye Jiao1, Tao Li2, Huimin Du2, Jungang Han1 1School of Computer Science,Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 2School of Electronic Engineering,Xi’an University of Posts and Telecommunications, Xi’an Shaanxi Email: jiaojiye@https://www.wendangku.net/doc/e013648457.html, Received: Aug. 19th, 2015; accepted: Sep. 3rd, 2015; published: Sep. 14th, 2015 Copyright ? 2015 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.wendangku.net/doc/e013648457.html,/licenses/by/4.0/ Abstract Emerging wearable computer has tremendous potential applications, and the use of GPU render-ing rich, intuitive and highly interactive human-machine interface is the core technology for many wearable applications. This survey of wearable graphics processor describes the current state of research and development in the field, analyzes the trend of GPU for wearable device, and gives key technologies of GPU implementations for wearable computer. Keywords GPU, Wearable Computer, Low Area, Low Power, Data Secure 适合可穿戴设备的图形处理器发展现状 和发展趋势 焦继业1,李涛2,杜慧敏2,韩俊刚1 1西安邮电大学计算机学院,陕西西安 2西安邮电大学电子信息工程学院,陕西西安 Email: jiaojiye@https://www.wendangku.net/doc/e013648457.html, 收稿日期:2015年8月19日;录用日期:2015年9月3日;发布日期:2015年9月14日
人机交互 《可穿戴设备》 论文解读
可穿戴设备介绍 学院:计算机科学与技术学院 专业:计算机科学与技术 年级:2013级(3班) 姓名:贾辰 完成日期:2015年12月17日 指导教师:邝劲荺老师
目录 摘要: (2) 关键词: (2) 引言: (3) 正文: (3) (1)骨传导交互技术 (3) (2)眼动跟踪交互技术 (4) (3)AR/MR交互技术 (4) (4)语音交互技术 (4) (5)体感交互技术 (4) (6)触觉交互技术 (5) (7)脑波交互技术 (5) 结论: (5) 参考文献: (6) 摘要: 可穿戴设备设备,通俗地理解就是一种可穿戴的便携式计算设备,具有微型化、可携带、体积小、移动性强等特点。因此在人机交互方面与一般的计算设备,或者说智能设备不同,是一种人机直接无缝、充分连接的交互方式,其主要特点包括单(双)手释放、语音交互、感知增强、触觉交互、意识交互等。 关键词: 便携,计算设备,交互
引言: 可穿戴设备(Weatable device)源于简单的计步器,它最初只是功能单一的电子产品。随着移动互联网应用的不断深入,类似计步器的产品纷纷与手 机及移动互联网应用联系在一起,一下子激活了这些“古老”产品的活力。随 着可穿戴在身上的电子产品越来越多,一个新名词————可穿戴设备,和它 代表的产品一样迅速流行并走红。它不仅是一种硬件装置,更能通过软件支持 以及数据交互和互联网应用来实现强大的功能。 正文: 可穿戴设备(Wearable Devices)是指应用穿戴式技术对日常穿戴进行 智能化配置的设备,将各类传感、识别、连接和云服务等技术综合嵌入到人们 的眼镜、戒指、手表、手环、服饰及鞋袜等日常穿戴的设备中,来实现用户五 感能力拓展、生活管家、社交娱乐、健康监测等功能,设备一般外形较为美观 时尚且易于佩戴、具备一定的计算能力以及拥有专用的应用程序和功能等特点。 据中国产业调研网发布的《2015年版中国可穿戴设备市场现状调研与发 展趋势分析报告》显示,得益于4G移动互联网的发展和普及,以及传感器等相关技术日趋成熟,可穿戴设备已经由概念走入人们的日常生活。2013年是可穿 戴设备的起步年,从上游元器件供应到下游终端产品推出,受到市场极大的关 注和热议。而在2014年CES上,各大厂商都将穿戴式产品视为全年布局的重中之重,从宣传攻势到产品发布,公司种类与规模跨度的分散与丰富促成了穿戴 式产品的多样性,无论在产品的终端形态和穿戴方式,还是在产品的应用效能 和实际用途方面都达到了一个崭新的高度,预示着可穿戴设备行业爆发在即。 可穿戴设备是未来移动互联网的发展趋势。 而当下主流的交互设备有如下几个方面: (1)骨传导交互技术 骨传导交互技术主要是一种针对于声音的交互技术,将声音信号通过振动 颅骨,不通过外耳和中耳而直接传输到内耳的一种技术。骨传导振动并不直接 刺激听觉神经,但它激起的耳蜗内基底膜的振动却和空气传导声音的作用完全 相同,只是灵敏度较低而已。 骨传导技术通常由两部分构成,一般分为骨传导输入设备和骨传导输出设备。骨传导输入设备,是指采用骨传导技术接收说话人说话时产生的骨振信号,并传递到远端或者录音设备。骨传导输出设备,是指将传递来的音频电信号转 换为骨振信号,并通过颅骨将振动传递到人内耳的设备。
可穿戴设备调研报告
可穿戴设备调研报告 学院:微电子学院 专业:集成电路设计与集成系统 班级:集电13-1 姓名:张翼翔 学号:90 时间: 引言: 可穿戴设备即直接穿在身上,或是整合到用户的衣服或
配件的一种便携式设备。可穿戴设备不仅仅是一种硬件设备,更是通过软件支持以及数据交互、云端交互来实现强大的功能,可穿戴设备将会对我们的生活、感知带来很大的转变。 本文将对可穿戴设备的现状进行调查,分析现有产品的局限性,指出未来改进的空间及可能发展的方向。 正文: ○1技术发展与演进历程 早在1922年,发明家H. Day就曾和一顶被改成收音机的礼帽合影过,而1930年8月号的美国杂志《现代力学》也曾发表过类似的故事,一位德国工程师也曾创造过一顶硬草帽样式的“帽型收音机”。 发明家Victor T. Hoeflich 1949年3月推出了天外来客般的“帽型收音机”。因为这种帽子上的收音机以电子管技术为依托,所以Hoeflich便使两根电子管和一支环形天线成为了该产品的显著特征,而调频旋钮则安装在两根电子管中间。帽子上的收音机能戴在头部,用电池低电压供电,电池则由用户放在自己口袋里携带。虽然“帽型收音机”在开始时反响甚好,但这种待遇却并未持续。它的失败主要还是基于技术限制,这种帽子只有两个电子管,而家用收音机
则有五六个,后者运转得更好。另外,上世纪30年代末,更高级的FM调频无线电格式在美国得以使用,但“帽型收音机”只能接受AM频率信号。而且环形天线也是有方向性的,用户只要转头,信号就会丢失。 这种“帽型收音机”大概可以称作可穿戴设备的雏形。(以上信息来自于可穿戴设备网) 在上世纪60到70年代,一些发明家制作出了一些最早的可穿戴设备,来增加在赌桌旁的胜率。从那之后,可穿戴技术的研发还维持在较小的规模。而有些相关人士决定将这一技术的起始时间定在1975年,也就是Hamilton Watch推出Pulsar计算器手表的那一年。但在这之后可穿戴设备的发展仍无太大进步。直到新千年之后,可穿戴设备技术才开始了迅猛发展。 1961年:可穿戴计算机 麻省理工学院的数学教授Edward Thorp在他第二版的赌博指南《Beat the Dealer》当中写道,他成功地使用自己制作的可穿戴计算机在轮盘赌当中作了弊。Thorp和联合开发者Claude Shannon发现,自己的设备在赌局当中可以为佩带者带来44%的优势。 1972年:George 为了在二十一点当中取得优势。Keith Taft发明了一款用脚指
可穿戴设备趋势报告
可穿戴设备趋势报告 正当智能手机领域表现白热化的分庭抗礼之势时,可穿戴设备浪潮犹如春夜的细雨一般,迅速弥漫了整个移动互联网市场。 自从去年4月Google Glass发布以来,移动可穿戴设备概念成为了市场中的焦点。有人甚至认为可穿戴设备将代替以智能手机为代表的移动设备潮流,进一步智能化、简便化人们的生活和工作。一时间,产业链中个各方都准备进军可穿戴设备领域,五花八门的新概念、新产品,让我们有些目不暇接。 当前出现的可穿戴设备有什么?应该如何区分?可穿戴设备的局限与发展趋势又是什么?今天,猎云网就带您全面梳理相关可穿戴设备的问题。 一、种类的划分 当前,可穿带设备的种类繁多,按照不同的分类方式,能够规划出不同的类型。以下为猎云网提供两分类方式: ①按照应用功能划分: ·人体健康、运动追踪类:Nike+系列产品和应用(Fuelband)、Jawbone Up、叮咚手环、GlassUp、Fitbit Flex。以上这些可穿戴设备,主要通过传感装置对用户的运动情况和健康状况做出记录和评估,绝大部分需要与智能终端设备实行链接显示数据。 ·综合智能终端类:Google Glass等。这些设备虽然也需要与手机相连,不过功能更增强大,独立性更强。未来将成为可穿戴设备的主导产品。 ·智能手机辅助类:Pebble等。这些可穿戴设备作为其它移动设备的功能补充,一方面必须与智能手机等设备配合使用,另一方面能够简化智能手机的操作。 ②按照佩戴位置划分:这种分类方法虽然缺乏依据,但是分类方法相对简单、界限清晰。·手(臂)环类:主要以一系列运动记录手环、臂环为主。 ·手表类:Pebble等辅助类智能设备。 ·眼镜类:主要是以Google Glass等为主的新型智能终端。 ·智能服装类:主要由Geek开发,几乎没有正式发布的产品。例如,能够通过转化太阳能为电子设备充电的比基尼、靴子等。 以下是猎云网根据媒体公开报道的资料,总结的各种可穿戴设备(包括已经发布的、暂时未发布以及各种谣传)
人体下肢外骨骼机器人的步态研究现状
人体下肢外骨骼机器人的步态研究现状 王楠,王建华,周民伟 外骨骼(exoskeleton )一词来源于生物学,是指为生物提供保护和支持的坚硬的外部结构[1],如甲壳类和昆虫等节肢动物的外骨骼系统。人体外 骨骼机器人是将人的智慧与机器的机械动力装置结合为一体的机器人[2]。美国于2000年开展了“增强人体机能的外骨骼”(Exoskeletons for Human Performance Augmentation ,EHPA )研究项目[3-4],自此,外骨骼机器人的开发与应用逐渐进入 人们的视线,成为关注的焦点。由于外骨骼机器人不仅为操作者提供了诸如保护、身体支撑等功能,还能在操作者的控制下完成一定的功能和任务,因此在下肢功能障碍患者的步行功能锻炼过程中的应用逐渐增多[5-7];此外,其在单兵作战装备 【摘要】外骨骼机器人是将人的智慧与机器的机械动力装置相结合的一种机器人,不仅可以为操作者提供保护、身体支撑等功能,还可以在操作者的控制下完成一定的功能和任务,应用前景巨大。文中阐述人体下肢外骨骼机器人下肢外骨骼实现行走应具备的关节及其活动度,介绍下肢外骨骼机器人步态控制的基础——正常步态分析,详细论述了目前控制下肢外骨骼机器人行走及步态稳定性的主要方法。 【关键词】下肢;机器人;外骨骼;步态 中图分类号:R-05,R336文献标识码:A 文章编号:1674-666X(2012)01-0062-06 Current researches of gait analysis on human lower extremity exoskeleton robotic device WANG Nan,WANG Jianhua,ZHOU Minwei.Department of Overseas Chinese,Guangzhou General Hospital of Guangzhou Military Command,Guangdong 510010,China 【Abstract 】Exoskeleton robotic device is a kind of robot that combines the intelligence of human with the mechanical power of machine,which can not only provide protection and support for operators but also accomplish certain functions and missions under the control of operators.In this paper,relative key factors of lower extremity exoskeleton robotic device techniques are introduced briefly such as the joints and the range of motion (ROM)which the lower extremity exoskeleton should be equipped,the normal gait analysis which is the basis of gait control of the exoskeleton robot,and then the major walking control methods and gait stability control methods for lower extremity exoskeleton robotic device which are discussed in detail. 【Key words 】Extremities;Robotics;Exoskeleton;Gait DOI :10.3969/j.issn.1674-666X.2012.01.010 基金项目:广东省科技计划项目(2010B010800006),广州市科技计划项目(2010J-E311) 作者单位:510010广州军区广州总医院华侨科(王楠);脊柱外科(王建华);医务部(周民伟)E-mail :115989930@https://www.wendangku.net/doc/e013648457.html, 综述
分析可穿戴设备现状以及未来发展趋势
分析可穿戴设备现状以及未来发展趋势 近年来全球可穿戴设备出货量为3.1亿台,比之前增长16.7%,市场规模庞大。而随着消费升级及AI、VR、AR等技术的逐渐普及,可穿戴设备已从过去的单一功能迈向多功能,同时具有更加便携、实用等特点。智能可穿戴设备在医疗保健、导航、社交网络、商务和媒体等许多领域有众多可开发应用,并能通过不同场景的应用给未来生活带来改变。 目前市场上主要的可穿戴产品形态各异,主要包括智能眼镜、智能手表、智能手环、意念控制、健康穿戴、体感控制、物品追踪等。其中,医疗卫生、信息娱乐、运动健康是热点;产品功能方面,互联(NFC、Wifi、蓝牙、无线)、人机接口(语音、体感)、传感(骨传感、人脸识别、地理定位、各类传感器)是该类产品必不可少的功能。 智能可穿戴设备包括智能手表、智能手环、3D眼镜等,其中,智能手表是炙手可热的数码产品,可将手表内置智能化系统、搭载智能手机系统而连接于网络而实现多功能,能同步手机中的电话、短信、邮件、照片、音乐等。智能化系统由现代通信与信息技术、计算机网络技术、行业技术、智能控制技术汇集而成的针对某一个方面的应用智能集合。随着市场对于智能手表等可穿戴设备的需求增加,传感器、光纤通信、触控面板等领域将收益,也将带动稀有金属铟、锗、镓等品种消费增长。 可穿戴设备发展极具潜力。技术的迭代和商业上的可能性正在超越人们的想象,其功能从运动监测到短信和电话提醒,从玩游戏、在线教育到畅游互联网,可穿戴设备越来越让人们感受到科技的魅力。而Wi-Fi、智能蓝牙、NFC和GPS这些成熟技术,高效的无线连接设计也降低了可穿戴设备在处理能力和电量等方面的需求。专业人士对各类可穿戴设备近几年的增长做了预测,其中智能手表、运动手环、可穿戴医疗智能设备占据了大部分市场份额,而智能眼镜、智能衣服等也呈增长态势。 发展趋势 智能穿戴的目的是探索一种全新的人机交互方式,通过智能设备穿戴在人体之上这种方式为消费者提供专属的、个性化的服务。随着移动互联网技术的发展和低功耗芯片、柔性电
可穿戴设备项目可行性分析报告
可穿戴设备项目可行性分析报告 规划设计/投资分析/实施方案
可穿戴设备项目可行性分析报告 统计显示,2017年全球可穿戴设备出货量为3.1亿台,比2016年增长16.7%,市场规模达到305亿美元。而随着消费升级及AI、VR、AR等技术的逐渐普及,可穿戴设备已从过去的单一功能迈向多功能,同时具有更加便携、实用等特点。智能可穿戴设备在医疗保健、导航、社交网络、商务和媒体等许多领域有众多可开发应用,并能通过不同场景的应用给未来生活带来改变。 该可穿戴设备项目计划总投资14695.28万元,其中:固定资产投资12277.94万元,占项目总投资的83.55%;流动资金2417.34万元,占项目总投资的16.45%。 达产年营业收入20926.00万元,总成本费用16197.09万元,税金及附加280.67万元,利润总额4728.91万元,利税总额5661.84万元,税后净利润3546.68万元,达产年纳税总额2115.16万元;达产年投资利润率32.18%,投资利税率38.53%,投资回报率24.13%,全部投资回收期5.64年,提供就业职位323个。 本报告所涉及到的项目承办单位近几年来经营业绩指标,是以国家法定的会计师事务所出具的《财务审计报告》为准,其数据的真实性和合法性均由公司聘请的审计机构负责;公司财务部门相应人员负责提供近几年
来既成的财务信息,确保财务数据必须同时具备真实性和合法性,如有弄虚作假等行为导致的后果,由公司财务部门相关人员承担直接法律责任;报告编制人员只是根据报告内容所需,对相关数据承做物理性参照引用,因此,不承担相应的法律责任。 ......
下肢外骨骼康复机器人设计及运动学分析
下肢外骨骼康复机器人设计及运动学分析 发表时间:2017-03-16T14:57:02.420Z 来源:《科技中国》2017年1期作者:王子鸣[导读] 本文对该机构进行了运动学分析,并使用MATLAB对机构进行了轨迹规划仿真。 (宜昌市葛洲坝中学湖北宜昌 443002) 摘要:下肢运动功能障碍患者为数众多,常规的康复训练高度依赖理疗师,成本昂贵,常人难以承受。下肢外骨骼康复机器人能有效解决这一社会问题。本文设计了一个单腿两自由度主动驱动的下肢外骨骼康复机器人。采用两个直线驱动器分别驱动髋关节和膝关节的运动,直线驱动器末端安装有力传感器,通过时时检测人-机作用力实现机器人的柔顺控制。本文对该机构进行了运动学分析,并使用MATLAB对机构进行了轨迹规划仿真。仿真结果表明该下肢外骨骼康复机器人具备辅助病人的能力。关键词:下肢外骨骼,柔顺控制,轨迹规划 0 引言 随着人口老龄化的发展,脑卒中,骨关节炎等老龄化疾病患者数量逐渐增加。这类患者往往患有各种致残的疾病,丧失正常的运动能力[1]。在这样的时代背景下,未来社会对康复医疗的需求将越来越迫切。下肢外骨骼机器人将为解决这一社会问题发挥重要的作用。 近年来,国内外众多研究机构对康复机器人开展了深入的研究。在台架式下肢外骨骼康复机器人研究方面,瑞士HOCOMA公司和瑞士苏黎世联邦理工大学共同研制的Lokomat外骨骼康复机器人,它髋关节和膝关节各采用一个直线电机进行驱动,单腿具有两个自由度,双腿四个自由度。该机器人在轨迹控制的基础上采用了阻抗控制的方式,具有很好的实用性和用户体验[2-4]。哥伦比亚大学研发的ALEX,除了单腿的四个自由度之外,骨盆上还具有四个自由度,机器人总共具有十二个自由度,它将电机放在下肢外骨骼后方,采用带轮等实现电机远端驱动,有效地降低了机器人运动部件的惯量,该机器人采取将切向力和法向力作用在患者的踝关节的方式,切向力帮助患者按照轨迹移动,法向力用于调整踝关节轨迹的法向运动阻碍[5]。荷兰屯特大学研发的LOPES,该机器人采用绳驱动的方式,单腿有四个自由度,除了髋关节和膝关节在矢状面上的各一个旋转自由度外,还增加了骨盆的移动和髋关节的内收外展运动。该机器人同时具有两种不同的控制模式,分别为机器人主动和患者主动,充分考虑到了不同人的行走能力,能根据患者的实际需要提供必要的辅助[6]. 瑞士洛桑理工大学研制的WalkTrainer,它髋关节,膝关节,踝关节各一个自由度,单腿具有3个自由度,同时骨盆具有6个自由度,机器人总共有12个自由度。该机器人采用了肌肉电刺激的物理疗法,同时通过腿部外骨骼上的力传感器,实现了人-机的闭环控制[7]。国内上海璟和研制的Flexbot机器人实现了多体位的康复训练,病情严重的病人在康复训练初期可以躺着进行康复训练,待恢复得较好时,可以选择站立式训练[8]。 此外,在独立式下肢康复外骨骼方面,以色列的Rewalk[9], 美国的EKSO[10],日本的HAL[11]等都是下肢康复机器人中的杰出代表。国内的电子科技大学研制的外骨骼机器人[12],北航研制的“大艾’外骨骼机器人[13]也取得了可喜的成绩。 与传统的工业机器人相比,康复机器人的一个突出特点是与人的交互十分频繁。安全性,舒适性,以及适应各种不同的工作环境是康复机器人需要考虑的重要问题。相反,工业机器人所需的高精度,高速度等特性在这里要求并不高。因此,设计出具有柔顺性的下肢外骨骼康复机器人具有重要的意义。 本文将就设计出一套下肢外骨骼康复机器人展开论述。首先,将根据人体下肢结构进行机器人的机械机构设计,接着进行机构的运动学分析,并使用MATLAB软件对该机构进行仿真。仿真结果表明该机器人具有协助病人进行康复运动训练的能力。 1 机构模型 1.1机构模型设计 人体结构模型是设计下肢外骨骼康复机器人基础。因此,我们先对人体下肢进行分析。人体下肢主要有三个关节,分别是髋关节,膝关节,踝关节。髋关节主要有髋臼和股骨组成,在运动时,股骨绕着髋臼运动,是一个球窝关节。膝关节连接了股骨和胫骨,踝关节主要由胫骨和腓骨下端的关节面与距骨滑车构成[14]。人体行走过程中,矢状面上的运动占主导地位。为了机构的简化,我们仅考虑下肢在矢状面上的运动,并把髋、膝、踝关节都简化为铰链关节。 该下肢外骨骼康复机器人为台架式下肢外骨骼机器人,上方的支架与台架相连接。髋关节与膝关节之间的连杆与大腿绑定,膝关节与踝关节之间的连杆与小腿绑定。直线驱动器由直流电机,同步带,滚珠丝杠,以及末端的力传感器组成。同步带,滚珠丝杠等机构把直流电机的转动转化为直线运动。力传感器能够实时检测到直线驱动器的推力,当推力过大时,直线驱动器减慢速度或者停止运动甚至向反方向运动,力传感器的加入增加了康复机器人的柔顺性,避免了机器人对人的伤害。该机构中髋关节和膝关节由两个直线电机主动驱动,踝关节为被动运动。为了能够适应不同人的腿长,设计了长度调节机构。该调节机构为在调节机构上下部之间都加工出一系列出通孔,上下两部分通过螺栓连接。通过调节机构下部分与上部分在不同位置连接,可以改变机构的长度。 1.2机构参数 人体正常步行过程中,髋关节最大屈曲约30°,最大伸展约20°,膝关节最大屈曲约为65°、最大伸展为0°。踝关节最大背屈约为30°,最大跖屈约为50°[14].我们设计的该机构的适应人体身高为150mm-190mm.根据这个数据,经过运动学解算,我们选择直线驱动器的工作行程范围如表1所示。
可穿戴设备的发展现状与分析
海南大学 现代测控与控制技术大作业报告 题目: 可穿戴设备的发展现状与分析 姓名:车京运 专业班级:电子信息工程一班 指导老师:王磊老师 完成日期:年月日
目录 摘要……………………………………………………………………一、可穿戴设备现状………………………………………………… 、可穿戴设备定义……………………………………………… 、可穿戴设备典型应用分析…………………………………… 、可穿戴设备技术环境………………………………………… () 芯片技术………………………………………………… () 传感器技术……………………………………………… () 技术………………………………………………… () 人机交互技术………………………………………… () 云计算技术和大数据…………………………………… () 专利技术………………………………………………… 、可穿戴设备崛起……………………………………………… 二、可穿戴设备产业目前存在的问题……………………………… 三、可穿戴设备应对措施……………………………………………… 四、可穿戴设备对幼儿、老人等刚需群体的前景………………… 五、未来的趋势……………………………………………………… 六、结语………………………………………………………………参考文献………………………………………………………………现代测控测温实验……………………………………………………
可穿戴设备的发展现状与分析 车京运 (电子信息工程一班) 摘要:随着科技与业的发展,国内外掀起了可穿戴设备科技潮。如今,不同形态的可穿戴设备已从各个方面进入了人们的生活。同时,随着市场上的可穿戴设备越来越多,一些问题也逐渐暴露出来。该论文首先介绍可穿戴设备发展现状和技术环境,接着介绍其面临的问题,进而分析可采用的发展对策,最后就可穿戴设备发展进行展望。 关键字:可穿戴设备现状发展趋势技术存在问题
人体外骨骼发展现状
1 绪论 1.1 研究背景与意义 在急速发展的现代社会,人们通常都会使用轮式交通工具运载沉重物体,但在实际生活中,有许多地方道路凹凸不平,轮式交通工具难以行进,由于人腿能适应较复杂路况的优点,使得行走助力装置应运而生[1]。它是一种可以辅助人们行走的人机系统,它将人和两足步行机器人结合在一起,利用人的智能来控制机器人的行走,简化了自主行走式两机器人最为常见的步态规划和步态稳定性问题,同时它又可以提供动力协助人的行走,增强人们行走的能力和速度,缓解人在大负重和长时间行走情况下极易出现的疲劳感,大大扩大人们的运动范围,故可用于军事、科考、旅游、交通等各方面,具有广泛的应用前景。在一些交通已经过于拥堵的城市,下肢步行外骨骼还可以作为一种新型的轻型环保交通工具,可以大大减少城市汽车流量,降低市区的堵车情况,减少城市的汽车尾气污染,减缓城市的停车压力,同时使用者还可以达到锻炼身体的目的[2]。 目前,行走助力装置主要应用于两方面:(1)用于负重、长距离行走时进行助力(2)用于老年人或下肢瘫痪者行走时进行助力。行走助力装置的发展借鉴了腿式机器人、仿人机器人的技术和经验,又在结构、控制能力等方面做了深入的研究,经过不断的努力,现已开发出几类行走助力装置,并对相关技术做了深入的探讨,取得了一定的成果。 随着社会的发展和生活水平的提高,人们对医疗水平的期望值也越来越高。而医疗水平的提高自然依仗医疗器械的更新和改善。对于下肢受伤或有关节肌肉病患的病人来说,克服伤病需要借助适当的医疗器械帮助下肢逐渐恢复正常机能。本文所介绍的正是出于此种目的,由多缸并联的气动步行助力器。 1.2 国际上下肢外骨骼的研究现状 1.2.1 德国奥托博克(ottobock)的C-LEG智能仿生腿 德国OTTOBOCK公司的最新产品智能仿生腿(C-LEG)是世界上第一个完全由电脑控制步态的假肢膝关节系统,能使配戴者稳定牢固的控制下肢运动。智能仿生腿有两个电子传感器:一个位于小腿管中,分别测取脚跟踏地和脚前掌的压力,为假肢支撑期的稳定性控制提供信息。一个位于膝关节的支撑框架中,测量膝关节屈度和膝关节摆动速度的变化,为假肢摆动后期的活动性控制提供信息。这两个传感器可将假肢的运动状态以每秒50次的采样频率向电脑提供测定值。微处理器可以瞬间识别使用者的假肢状态。同时,微处理器将所得信号进行加工处理,通过伺服电机控制膝关节液压系统。整个反馈过程是真正意义因人而宜的调整。完全个性化的分析,服务,为患者提供更多的舒适性,活动性和生活乐趣。
可穿戴设备的传感器技术
基于传感器技术在可穿戴设备中的应用研究 (机械工程学院机械三班张志忠 89) 摘要:可穿戴设备是一种可以安装在人、动物和物品上,并能感知、传递和处理信息的计算设备,传感器是可穿戴设备的核心器件,可穿戴设备中的传感器是人类感官的延伸,增强了人类“第六感”功能。随着生物科技的发展,以及传感器小微型化与智能化方向的发展,可穿戴设备也许将会进化成植入人体的智能设备。 传感器简介 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。 可穿戴等智能终端设备应用 2013年是可穿戴设备元年,谷歌、三星、苹果、微软等科技界的佼佼者都有计划或已推出可穿戴设备。“互联网女皇”玛丽?米克尔也在《互联网报告2013版》中强调了可穿戴设备的增长潜力,认为这是下一个热门领域。目前上市的可穿戴设备五花八门,从智能眼镜到智能手表,从智能服装到智能鞋子,从高尔夫手套到拳击手套,但都和传感器技术有着千丝万缕的联系。回顾信息技术发展历程,人类经历了计算时代、通讯时代,当前正步入“感知时代”,以智能手机、可穿戴设备为代表的智能终端促使传感器需求呈现爆发式增长。 随着传感器集成性,功能性和智能化的提升,可穿戴设备已经不仅仅局限在人体的具体部位,而是在向全身布局,使其除了信息交互和通信,更具有了医疗意义,甚至具备了外部环境,建筑等数据的收集,监控和传输服务。 可穿戴设备的主要应用领域包括:以血糖、血压和心率监测为代表的医疗领域,以运动监测为代表的保健领域,以信息娱乐为代表的消费领域,以数据采集和显示为代表的工业和军事领域。IMS研究指出,保健和医疗领域的可穿戴设备占据今年60%市场份额,未来的份额可能会进一步提升。 可穿戴设备中的传感器分类 可穿戴设备中的传感器根据功能可以分为以下几类:
可穿戴设备项目计划书
可穿戴设备项目 计划书 投资分析/实施方案
可穿戴设备项目计划书 统计显示,2017年全球可穿戴设备出货量为3.1亿台,比2016年增长16.7%,市场规模达到305亿美元。而随着消费升级及AI、VR、AR等技术的逐渐普及,可穿戴设备已从过去的单一功能迈向多功能,同时具有更加便携、实用等特点。智能可穿戴设备在医疗保健、导航、社交网络、商务和媒体等许多领域有众多可开发应用,并能通过不同场景的应用给未来生活带来改变。 该可穿戴设备项目计划总投资8675.33万元,其中:固定资产投资6762.82万元,占项目总投资的77.95%;流动资金1912.51万元,占项目总投资的22.05%。 达产年营业收入13480.00万元,总成本费用10191.87万元,税金及附加149.99万元,利润总额3288.13万元,利税总额3891.66万元,税后净利润2466.10万元,达产年纳税总额1425.56万元;达产年投资利润率37.90%,投资利税率44.86%,投资回报率28.43%,全部投资回收期5.02年,提供就业职位184个。 本报告所涉及到的项目承办单位近几年来经营业绩指标,是以国家法定的会计师事务所出具的《财务审计报告》为准,其数据的真实性和合法性均由公司聘请的审计机构负责;公司财务部门相应人员负责提供近几年
来既成的财务信息,确保财务数据必须同时具备真实性和合法性,如有弄虚作假等行为导致的后果,由公司财务部门相关人员承担直接法律责任;报告编制人员只是根据报告内容所需,对相关数据承做物理性参照引用,因此,不承担相应的法律责任。 ......
可穿戴设备项目计划书目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
121 中国智能可穿戴设备市场 专题研究报告2015(简版)
本产品保密并受到版权法保护 Confidential and Protected by Copyright Laws 易观国际旗下 中国智能可穿戴设备市场专题研究报告2015(简版) 易观智库 2015年1月
目录 1 智能可穿戴设备市场产业环境分析 智能可穿戴设备领域的价值所在 智能可穿戴式设备 2 3 4 5 中国智能可穿戴设备市场认知度调查 6 智能可穿戴设备市场前景展望及趋势 智能可穿戴设备厂商面临的问题和挑战 移动互联网行业新机遇-智能可穿戴设备
可穿戴设备发布时间轴1975-2015 ?Hamiltom Watch 推 出Pulsar 计算器手表 ?Sony 推出Walkman 卡带随身听 ?卡西欧推出能存储信息的Databank 手表CD-40 ?Reflection 开发出Private Eye 头戴式显示屏 ?Megellan 推出消费级手持GPS 设备 ?Olivetti 推出可追踪用户LBS 的胸章 ?哥伦比亚大学开发出KARMA 增强现实系统 史蒂夫曼恩开发出记录生活的可穿戴无线摄像头 ?RIM 推出RIM859双向寻呼机 全球首款蓝 牙耳机发货 ?耐克和苹果联合推出了Nike+iPod ?苹果发布iPhone ?Fitbit 成立 ?2007年 Nike+iPod 运动 装备登录中国,运动数字化产品首次进入中国普通消费者视野 Brother 推出AirScounter 虚拟视网膜显示器 咕咚网推出首款健康追踪器 Jawbone 推 出可防水的 Up 智能腕带 ?Sony 发布 SmartWatch1代 ?Pebble 发布 PebbleWatch ?Google 发布Project Glass 计划 ?Google 发布AndroidWear ? Google 发布云健康管理平台Google Fit ?圆形MOTO360发售 ?Apple 发布Health Kit 平台,公布AppleWatch ?Apple 正式推出第三方应用开发平台WatchKit ?微软发布Microsoft Health 和Microsoft Hand ?三星发布健康监控手环Galaxy Gear fit ?及预装Tizen OS 的智能手表在中国大陆上市 ? 小米手环发布,销量超过100万 ?果壳电子发布圆形智能手表GEAK Watch ?AppleWatch 正式发售 ?LV 等奢侈品品牌、知名手表品牌Tag Heuer 等将陆续进入智能可穿戴设备市场 ?Fitbit 成为首家上市的可穿戴公司 ?Nokia 进入智能可穿戴设备市场 ?智能可穿戴市场进一步细分 互联网时代 移动互联网时代 物联网时代 ?全球首款蓝牙耳机发货 1975 1979 1984 1989 1990 1993 1994 1999 2000 2006 2008 2010 2011 2012 2013 2014 2015 ... 2007 ?果壳电子发布智能手表GEAK Watch 1、手环、智能戒指 ?中兴、腾讯、百度、小米均表示将进入可穿戴设备领域 ?三星发布Galaxy Gear 智能手表 ?日产发布驾驶员专用Nismo 智能手表 ?奇虎360发布360儿童卫士手环 2009 ?咕咚网成立 ?Fitbit 发布首款可穿戴产品