地铁牵引变流器直流侧振荡抑制策略研究

1001-8360(2011)08-0052-06
地铁牵引变流器直流侧振荡抑制策略研究
孙大南1刘志刚1林文立2刁利军1
1.北京交通大学电气工程学院,北京 100044;2.浙江大学电气工程学院,浙江杭州 310027
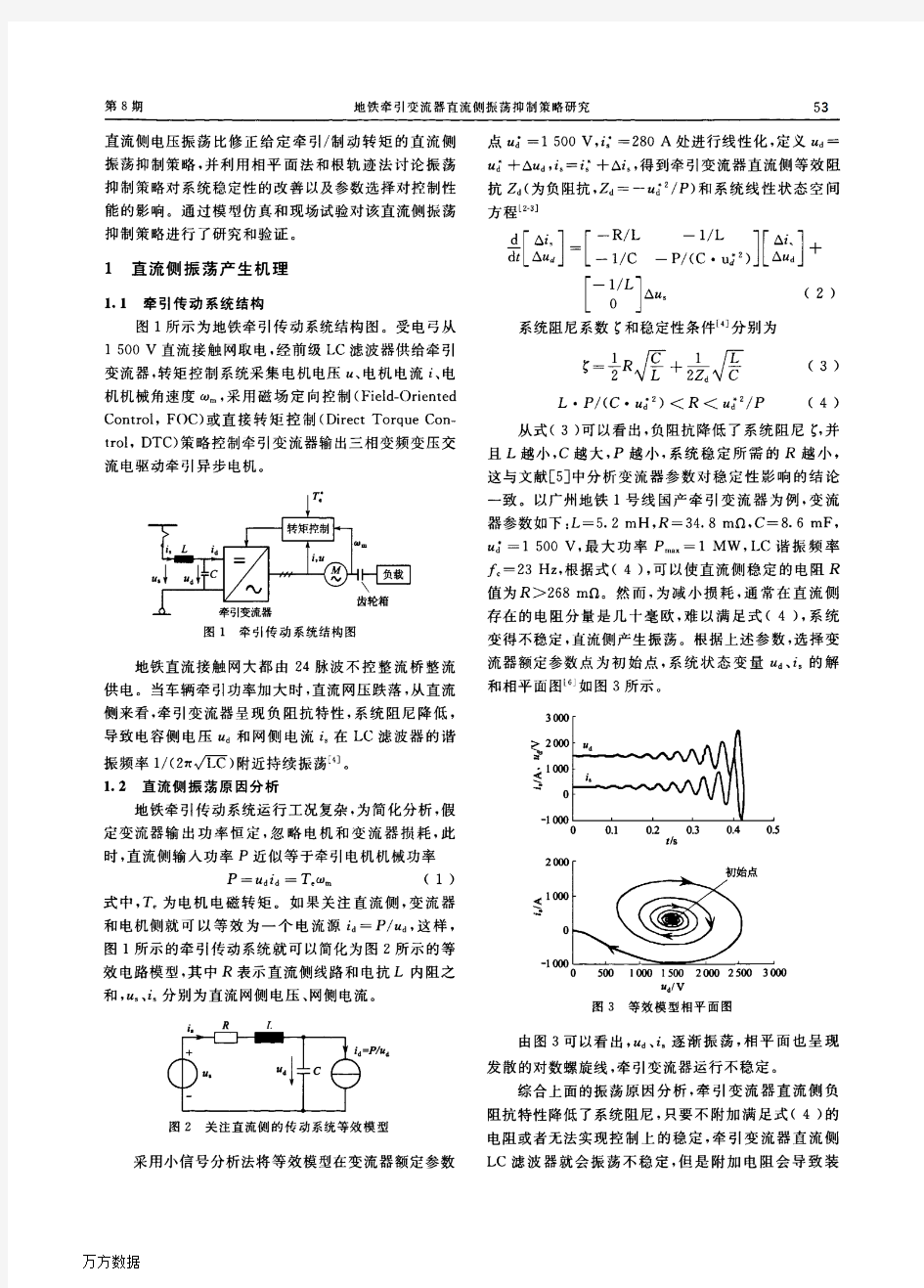
摘要:负阻抗会引起地铁车辆牵引变流器直流侧电压、电流振荡,降低牵引传动系统稳定性。本文建立地铁牵引变流器关注直流侧的系统小信号模型,详细分析直流侧振荡的产生机理。提取直流侧电压谐振分量,提出基于直流侧电压振荡比修正给定牵引、制动转矩的直流侧振荡抑制策略,利用相平面法和根轨迹法讨论振荡抑制策略对系统稳定性的改善以及参数选择对控制性能的影响。模型仿真和地铁现场试验结果均表明,该振荡抑制策略能有效消除直流侧振荡现象,提高系统稳定性。
牵引变流器;负阻抗;振荡抑制;稳定性
U231.8A10. 3969/j. issn. 1001-8360. 2011.08.009
Research on DC-Link Oscillation Suppression Strategy in
Metro Traction Converter
SUN Da-nanLIU Zhi-gangLIN Wen-liDIAO Li-jun
2011-03-162011-04-16
“十一五”国家科技支撑计划重点项目(2007BAA12B07)
作者简介:孙大南(1986-),男,安徽桐城人,博士研究生。
E-mail: 08117335@ bjtu. edu. cn
53
54
55
56
@@[1] Lennart Harnefors, Massimo Bongiorno, Stenfan Lund berg. Input-admittance Calculation and Sharping for Con trolled Voltage-source Converters[J]. IEEE. Trans. Power App. Syst. ,2007,54(6).@@[2] Carpita M, Zueger H,Pellerin M. Transformer Used as a
DC Link Filter Inductance in DC High Power Traction Ap plications[C] // Proc. 9th Eur. Conf. Power Electron and
Appl.. Dresden, Aug. 2003.
@@[3] Sudhoff S D, Corzine K A,Glover S F. DC Link Stabilized Field Oriented Control of Electric Propulsion Systems[J]. IEEE Transactions on Energy Conversion, 1998,13(1).
@@[4] Mosskull H. Stabilization of an Induction Machine Drive
[C]//Licentiate Thesis, Royal Inst. Technol.. Stock holm, Sweden, 2003.
@@[5] Jian Shen. Inverter Drive System Stability for Traction Ap plication[C]// VPPC,Dec,2005.
@@[6] Pisit Liutanakul, Ahmed-Bilal Awan, Serge Pierfederici. Linear Stabilization of a DC Bus Supplying a Constant Power Load: A General Design Approach[J]. IEEE Trans. Power App. Syst. ,2010,25(2).
@@[7] Walczyna A M, Hasse K,Czarnecki R. Input Filter Stabili ty of Drives Fed from Voltage Inverters Controlled by Di rect Flux and Torque Control Methods[J]. Proc. Inst. Elec tr. Power Appl. 1996,143(5) : 392-402.
@@[8] Kai Pietilainen, Lennart Harnefors, Andreas Petersson. DC-Link Stabilization and Voltage Sag Ride-through of In verter Drives[J]. IEEE. Trans. Power App. Syst. , 2006,53 (4).
@@[9] Marko Hinkkanen, Jorma Luomi. Induction Motor Drives
Equipped with Diode Rectifier and Small DC-link Capaci tance[J]. IEEE. Trans. Power App. Syst. ,2008,55(1).
@@[10] Steven F. Glover, Scott D. Sudhoff. An Experimentally
Validated Nonlinear Stabilizing Control for Power Elec
tronics Based Power Systems[C]// Proceedings of the
1998 SAE Aerospace Power Systems Conference, 71-80.
地铁牵引变流器直流侧振荡抑制策略研究
作者:孙大南, 刘志刚, 林文立, 刁利军, SUN Da-nan, LIU Zhi-gang, LIN Wen-li, DIAO Li-jun
作者单位:孙大南,刘志刚,刁利军,SUN Da-nan,LIU Zhi-gang,DIAO Li-jun(北京交通大学电气工程学院,北京,100044), 林文立,LIN Wen-li(浙江大学电气工程学院,浙江杭州,310027)
刊名:
铁道学报
英文刊名:Journal of the China Railway Society
年,卷(期):2011,33(8)
本文链接:https://www.wendangku.net/doc/f714218495.html,/Periodical_tdxb201108009.aspx
地铁车辆牵引电气故障系统分析
龙源期刊网 https://www.wendangku.net/doc/f714218495.html, 地铁车辆牵引电气故障系统分析 作者:李语嫣 来源:《世界家苑》2018年第07期 摘要:随着我国地铁车辆的不断扩张线路,给市民生活、工作出行带来了很大便利。而 地铁作为高频运行的机械设备,在长期的运行中,难免会产生一系列的电气故障。本文根据多年工作实践,对地铁车辆电气系统构成、故障进行分析,以期提高维护效率。 关键词:地铁车辆;电气系统;故障 一、地铁车辆牵引技术发展及应用 (一)牵引传动的发展 当前大部分的地铁车辆采用的电能,在众多的传动技术研究中,根据地铁车辆的牵引方式不同选用直流传动和交流传动两种主要的传动方式,其原理是通过电能进入到电力发动机,由发动机完成车辆牵引。其中直流牵引发动机结构复杂,需要通过半控型晶闸管完成对直流的斩波,从而使斩波调压与相控调压相结合。随着地铁车辆牵引技术的不断发展,异步电机的交流传动开始应用到牵引技术当中,同时随着变频变压的电压逆变器问世,从而使交流传动成为主要牵引技术,欧洲国家于1990年代对直流传动车辆进行停产,退出舞台。 (二)牵引技术的运用 作为当前主要地铁车辆牵引技术,交流传动方式通过牵引变流器来实现对地铁车辆的控制,为了能够实现牵引变流,则需要在地铁车辆设计时运用变频器弥补电压等级不足等问题。如德国和日本,分别用过1200V和1700V的三电平逆变器,随着技术发展,逆变器加入高压模块,从而输出波形更好。同时在交流传动中加入速度传感器和全电制动,保证电气牵引的灵活和可靠。 二、地铁车辆电气牵引系统的构成及特点 一辆普通的地铁车辆的牵引系统主要是由避雷器(LP)、制动电阻(BR)、牵引逆变器(VVVF)、含HSCB的高压箱(HV)、牵引电动机(MOTOR)及受电弓(PAN)等部件组成。 其中高压箱主要是由高速断路器、充电设备及其主隔离开关组成。在一般的地铁车辆上都配有两个受电弓,之所以要配备两个受电弓,就是为了防止地铁在运行的过程中一个受电弓出现故障,另一台受电弓依然能够正常的运行,以提供车辆正常运行需要的高电压。在地铁车辆的牵引控制系统内,还配备有牵引逆变器,与牵引逆变器相连的一端有相应的支撑电容,通过这样的一个支撑电容,能够有效地保障逆变器输出电压的稳定程度,同时在地铁的运行过程中
闭环式管理:从战略到运营
闭环式管理:从战略到运营 作者:罗伯特·卡普兰(Robert S. Kaplan)、戴维·诺顿(David P. Norton)平衡计分卡创始人罗伯特·卡普兰和戴维·诺顿建立了一个闭环式的管理体系,将战略和运营结合起来,并为每个阶段提供了各种工具。 康纳公司(化名)日前成功上市,不过上市后不久它就开始迷失方向。虽然公司高管还是照例每月抽出一天的时间召开管理层会议,但会议的重点已悄然发生了变化。 根据管理层会议的日程,与会人员在上午讨论运营问题,下午讨论战略问题。但由于公司上市之后完成季度业绩目标的压力加大,运营问题开始挤占战略问题的讨论时间。糟糕的是,公司每次审核月度实际业绩和季度预测业绩,都发现收入低于预期,费用却高于预期。管理人员对此忧心忡忡,于是他们花大量的时间讨论,希望通过定价策略、精简产能、裁减行政事务人员和促销活动来缩短业绩差距。一位高管指出:“我们根本没时间讨论战略。要是达不到季度业绩目标,公司可能就无法生存。对我们来说,长期问题就是短期问题。” 像康纳公司这样的例子不胜枚举,包括一些老牌上市公司也都发现在它们的管理层会议中,货币学上“劣币驱逐良币”的格雷欣法则(Gresham's Law)(编者注:这一法则由托马斯·格雷欣爵士(Sir Thomas Gresham)于1558年首次提出,他认为:当公众对货币供给的某一部分怀有疑虑时,他们会将“良币”(good money)窖藏起来,并试图将“劣币”(bad money)转让给他人。)同样适用:人们对糟糕运营状况的讨论,必然会挤掉对战略成功实施的讨论。当公司陷入这一误区时,它们很快就会发现自己行进困难。它们疲于应付每季度的指标,而不去研究如何调整战略,才能创造出更好的增长机遇。公司的短期业绩总是差一截,它们也不去打破这种怪圈。于是,分析师、投资者和董事们开始质疑公司管理层对业务发展的规划和承诺。 然而,以我们的经验来看,公司业绩低于预期的原因并不是管理人员能力不足或不够努力,而是公司管理体系的崩溃。所谓“管理体系”,是指公司用于制定战略并将战略转化为具体运营措施的一整套综合流程和工具,它们还能帮助公司监督并提高战略和运营的成效。战略与运营之间普遍存在着失衡问题:过去25年的诸多研究表明,有60%到80%的公司制定的新战略没有达到预期目标。
牵引变流器变流器工作原理
牵引变流器变流器工作原理 1,概述 交流异步电动机的同步转速与电源频率的关系: ⑴ 变频调速就是利用电动机的同步转速随电机电源频率变化的特性,通过改变电动机的供电频率进行调速的方法。利用半导体功率开关器件如IGBT等变频装置构成变频电源对异步电动机进行调速。 同步转速随电源频率线性地变化,改变频率时的机械特性是一组平行的曲线,类似于直流电机电枢调压调速特性。因此,从性能上来讲,变频调速是交流电机最理想的调速方法。 与磁通Φ的关系: 异步电机电压U 1 ⑵ 有⑵式知,若不变,与成反比,如果下降,则增加,使磁路过饱和,励磁电流迅速上升,导致铁损增加,电机发热及效率下降,功率因数降低。如果上升,则减小,电磁转矩也就跟着减小,电机负载能力下降。由此可见,在调节的同时,还要协调地控制,即给电机提供变压变频电源,才可以获得较好的调速性能。 由变压变频装置给笼型异步电机供电所组成的调速系统叫做变压变频调 速系统,它可以分为转速开环恒压频比控制、转速闭环转差频率控制系统,可以满足一般要求的交流调速系统。若调速系统对调速系统静、动态性能要求不高的场合,比如风机、水泵等节能调速系统,可以采用转速开环恒压频比带低频电压补偿的控制方案,其控制系统结构简单,成本也比较低。若要提高静、动态性能,可以采用转速反馈的闭环控制系统。若调速系统对静、动态性能的要求很高,则需要采用模拟直流电机控制的矢量控制系统。矢量控制系统是高动态性能的交流调速控制系统,但是需要进行大量复杂的坐标变换运算,而且控制对象参数的变化将直接影响控制精度。直接转矩控制系统是近十几年来继矢量控制系统之后发展起来的另一种高动态性能的交流调速系统。它避开了矢量控制的旋转坐标变换,而是直接进行转矩“砰—砰”控制。 地铁列车和电动车组的调速系统,对静、动态性能的要求很高,采用矢量控制系统或直接转矩控制系统。地铁列车的牵引系统为直-交变频器,电动车组的牵引系统为交-直-交变频器。 随着电力半导体器件的发展,变频器的发展也经历了几个阶段。电力电子器件的可控性、模块化、控制手段的全数字化,利用了微机的强大信息处理能力,使软件功能不断强化,变频器的灵活性和适用性不断增强。随着网络时代的到来,变频器的网络功能和通信不断增强,它不仅可以与设备网的现场总线直接相连,还可以与信息交换实时数据。 2,牵引变流器工作原理
闭环式管理—从战略到运营
闭环式管理:从战略到运营 作者:罗伯特·卡普兰(Robert S. Kaplan) 戴维·诺顿(David P. Norton) 来源:哈佛商业评论网 导读:管理者往往为了完成短期的业绩指标而忽略了对公司长期战略至关重要的事项。平衡计分卡创始人罗伯特?卡普兰和戴维?诺顿建议公司应该建立一个闭环式的管理体系,将战略与运营结合起来,这个闭环管理体系有五个阶段,它能帮助公司管理者同时管理好战略和运营。五个阶段如下图: 在很多公司,管理者陷入了这样一个误区:为了完成短期的业绩指标,他们花大量的时间讨论解决运营问题,因为不解决短期问题,公司就无法生存;然而,
因为时间有限,他们却忽略了对公司长期战略至关重要的事项。结果,这些公司的战略与运营脱钩,每个季度的实际业绩总是与预期目标相差那么一截。 平衡计分卡创始人罗伯特?卡普兰和戴维?诺顿认为,这些公司业绩低于预期的原因并不是管理人员能力不足或不够努力,而是公司管理体系的崩溃。所谓“管理体系”,是指公司用于制定战略并将战略转化为具体运营措施的一整套综合流程。两位作者提议公司建立一个闭环式的管理体系(closed-loop management system),将战略和运营更紧密地结合起来。他们还为这个管理体系的每个阶段提供了各种工具,其中既包括他们自己创建的战略图和平衡计分卡等工具,也有许多其他管理者开发的工具,从而为战略的有效执行做出了更全面的指南。这个循环往复的闭环系统由五个阶段组成。 第一阶段:制定战略—公司在制定战略前,首先要对公司的使命、愿景和价值观达成共识,树立正确的思维模式,接着要对公司自身的优势和劣势有清楚的认识,并仔细分析外部环境和竞争对手的情况,以寻求机遇、应对威胁(即SWOT 分析)。在摸清了公司内外的状况后,公司可选择是发挥现有竞争优势或内部能力(迈克尔?波特的低成本与差异化战略选择,资源基础型战略),还是选择寻求全新的竞争定位(蓝海战略、颠覆性战略)。 第二阶段:转化战略。一旦制定好战略,管理人员需要将战略转化为可以明确传达给所有部门和员工的目标和措施。本文两位作者始创的战略图和平衡计分卡在这一阶段非常有用。战略图将战略目标按主题划分,而平衡计分卡则将战略目标和绩效衡量指标紧密地联系在一起。在这一阶段,对于将用在实施一系列战略举措的资源,公司还要确定和审批,并为每个战略主题指派一名高管负责到底。 第三阶段:规划运营。在确定了战略目标、衡量指标和各项战略举措后,公司接下来会制订运营计划,列出为实现战略目标而将采取的一些行动。这一阶段从确定流程改进项目的优先顺序开始,然后是制订详细的销售计划、资源能力计划,以及运营和资本预算。公司在这个阶段可以运用的工具和流程非常多,如质量和流程管理、作业成本核算、资源能力规划,以及动态预算等。
Buck电路闭环控制策略研究
实用文档 编号 航空航天大学 电气工程综合设计报告题目Buck电路闭环控制策略研究 学院自动化学院 专业电气工程及其自动化 指导教师毛玲 二〇一五年一月
Buck电路闭环控制策略研究 摘要 首先,本文对Buck电路的3种闭环控制策略进行了原理分析,比较,并对Buck主功率级电路进行了原理分析和建模,最后完成主电路的参数设计。 其次,本文详细阐述了V2控制工作原理,推导V2控制环的传递函数,并且建立小信号模型,对控制器进行优化设计。最后使用SABER2007对BUCK电路的V2控制电路进行了时域频域仿真。 关键词:Buck电路,V2控制
目录 摘要 (i) Abstract .................................................. 错误!未定义书签。第一章概述.......................................................... - 1 - 第二章 Buck变换器控制方法简介……………………………………………………… 2.1电压型控制………………………………………………………………………………. 2.2电流型控制……………………………………………………………………………… 2.3 V2控制…………………………………………………………………………………… 第三章 Buck变换器原理分析及建模……………………………………………………. 3.1 Buck 变换器传递函数…………………………………………………………………. 3.2Buck电路的边界条件……………………………………………………………………3.3主功率电路的参数设计……………………………………………………………….. 第四章 V2控制电路分析及设计……………………………………………………….. 4.1V2控制原理分析 4.2 V2控制的buck变换器小信号模型 4.3V2控制器优化设计 第五章电路仿真………………………………………………………………………… 5.1V2控制策略频域仿真 5.2时域仿真电路和仿真波形
储能逆变器的控制策略研究
储能逆变器的控制策略研究 发表时间:2018-05-30T10:13:41.427Z 来源:《电力设备》2018年第1期作者:杜学平 [导读] 摘要:目前我国经济发展十分快速,电力行业越来越普遍,随着分布式电源不断接入电网和微电网系统的发展,微电网对系统的运行稳定性及供电可靠性都提出了一定的要求。 (青岛科技大学自动化与电子工程学院山东青岛 266199) 摘要:目前我国经济发展十分快速,电力行业越来越普遍,随着分布式电源不断接入电网和微电网系统的发展,微电网对系统的运行稳定性及供电可靠性都提出了一定的要求。储能系统应运而生,储能系统可以存储过剩的电能,在发电能力较弱时再放出电能给负载供电,实现削峰填谷,完美解决新能源间歇性发电的问题。储能系统在微电网中发挥着非常重要的作用,而储能逆变器又是储能系统中的核心部分,因此储能逆变器的控制策略研究是非常有实用价值的。 关键词:储能;逆变器;控制策略;研究 1系统结构和基本原理 图1 系统结构简图 以电池为介质的储能系统主要由电池及其管理系统(风能、太阳能的储能系统)和能量转换系统(PCS)两个部分组成(如图1所示)。电池通过PCS与电网交换能量(或离网负载),根据实际需要储存或释放能量。作为电池与大电网之间接口的PCS,实际上是大功率的电力电子变流器,此处PCS特指储能逆变器(储能变流器)。 常见的储能逆变器分为单级型和多级型两种主要形式。单级型储能变流器的拓扑仅由一个AC/DC环节构成,其优点是结构简单、控制方法简便,逆变器损耗低,能量转换效率高。但是存在以下缺点:1)一个AC-DC不可以充分多路输出;2)电池电压的工作范围不能灵活控制;3)电池电压固定不能灵活分配。由于以上确定我们选择两多级型,我们选择两级,增加一级隔离DC-DC的控制,该级控制可以根据功率灵活的扩展DC-DC通道的数量和输出电压的大小(如图2所示)。 1.1 AC-DC部分介绍: AC-DC部分拓扑采用三电平,其中开关频率为20K,功率器件为:初步选定英飞凌的DF100R07W1H5FP_B3的IGBT模组。此部分效率可达到98%。在大功率PWM变流装置中,常采用三点式电路,这种电路也称为中点钳位型(Neutral Point Clamped)电路(如图3所示)。与两点式PWM相比,三点式PWM调制主要有以下优点,一是对于同样的基波与谐波要求而言,开关频率可以低得多,从而能够大幅度减少开关损耗;二是主功率器件断开时所承受的电压仅为直流侧电压的一半,因此这种电路应用在高电压大容量的产品上特别合适。在控制策略方面,在传统的PWM整流器双闭环控制的基础上,采用内模控制代替电流内环PI调节器,以提高系统的鲁棒性能、跟踪性能和动态响应能力。 图2 两级PCS框图图3 AC-DC主原理图 1.2 DC-DC部分介绍: DCDC部分拓扑采用CLLC准谐振开关技术,开关频率100K或者是更高频率,功率器件采用单管MOS并联组成(并联数量根据功率确定,具体原理框图见图4)。功率器件为:初步选定英飞凌的IRFP4668P6F。此部分效率可达到90%以上。隔离DC/DC部分采用CLLC谐振软开关技术,它应用谐振的原理,使开关器件中的电流(或电压)按照正弦或标准正弦规律变化。当电流通过零点时,使器件关断(或电压为零时,器件打开),从而减少开关损耗。它不仅可以解决硬开关变换器中的硬开关损耗问题、容性开通问题、感性关断问题并且还能解决二极管反向恢复问题,对于由于硬开关引起的EMI 等问题也有很好的改善。这种拓扑结构,电路结构简单,工作效率高,并在输入电压和负载变化范围很宽的情况下依旧具有良好的电压调节特性,不仅可以在原边实现开关管 ZVS,还可以使副边整流管实ZCS,且原副边管子的电压应力较低。 图4 DC-DC 原理框图 2、几种必要的控制模式 2.1并网模式到孤岛模式: 储能逆变器并网模式到离网模式的切换分为两种主动切换和被动切换。主动切换指人为的把储能逆变器离网;被动切换指因电网故障或者电压过低等原因,储能逆变器受到不良影响,把储能逆变器切离电网PW。主动切换情况下,电网电压幅值和频率等指标正常,此时模式切换策略较为简单,只需要提供一个与电网电压相同的量作为离网模式下储能逆变器控制策略的参考值,在断开开关的同时控制方式切换为VF,电压外环给定值为电网电压幅值和频率。被动切换情况下,电网电压幅值和频率等指标可能不正常,此时的控制策略需参考
高速动车组牵引变流器关键数据记录及分析 孙宝坤
高速动车组牵引变流器关键数据记录及分析孙宝坤 发表时间:2019-11-11T13:55:13.203Z 来源:《基层建设》2019年第23期作者:孙宝坤郭林[导读] 摘要:随着我国的经济在快速的发展,社会在不断的进步,我国的高速铁路建设在不断的完善,为保障高速动车组安全运行和满足牵引变流器研发及维护的需要,设计开发了高速动车组牵引变流器关键数据记录及解析系统。 中车青岛四方机车车辆股份有限公司山东青岛 266111 摘要:随着我国的经济在快速的发展,社会在不断的进步,我国的高速铁路建设在不断的完善,为保障高速动车组安全运行和满足牵引变流器研发及维护的需要,设计开发了高速动车组牵引变流器关键数据记录及解析系统。本系统以标准CPCI-6U结构数据采集板卡为基础,实现了对模拟信号、高低速数字信号的采集、记录工作,并能通过以太网接口与上位机进行数据传输,完成数据解析。该系统已在多 款动车组牵引变流器中得到应用,在实际故障分析中提供了准确的现场数据,为牵引变流器的研发、调试及维护提供了依据。 关键词:高速动车组;牵引变流器;数据记录;数据解析;CPCI-6U结构数据引言 牵引变流器作为高速动车组交流传动系统的关键设备,直接决定了动车组的使用性能、安全运行和运营能力。高速动车组的原型车从国外引进,无论从技术或价格上都严重影响高速动车组的长期稳定运营和维护,因此研制具有自主知识产权的高速动车组牵引变流器是提升自身设计能力、确保动车组正常运营的基础和保障,同时也是实现自主知识产权高速动车组研制的必经之路。中国铁道科学研究院机车车辆研究所已建成牵引变流器研发与试验平台,具备自主设计能力与条件,如牵引计算平台、电气性能仿真平台、软件开发平台、半实物仿真平台、变流器热仿真计算平台、箱体强度仿真平台、IGBT试验台、功率模块试验台和牵引传动系统综合试验平台,设计能力覆盖不同速度等级、不同功率等级的动车、机车、城际、地铁的牵引变流器。 1系统轻量化 牵引变流器作为整个牵引系统的核心部件之一,其功能是转换直流制和交流制间的电能量,并对各种牵引电机起控制和调节作用,从而控制车辆的运行。系统轻量化主要是从主电路结构上进行优化,在满足牵引性能和实现自我保护的前提下,尽量选用最少的电子元器件,其他功能通过控制软件实现。 2系统工作流程 数据记录解析系统主要实现外部模拟信号、数字信号的高速采集、触发记录工作,同时具备上位机网络授时、网路数据下载等功能。系统工作流程如图2所示。①系统上电后,主控芯片初始化并启动,完成工作参数的初始化工作,以及完成GPMC接口(FPGA和ARM的数据交互接口)的配置工作。②系统初始化完成后,启动1个1min定时器,如果在1min内高速数据采集板收到外部网络的授时指令,则配置本地时间,结束1min定时,如果没有收到授时指令,则等待定时器结束。③定时结束后,高速数据采集板启动数据采集工作。④在采集过程中,FPGA循环采样外部IO信号以及模拟量输入信号,并将采集到的数据通过GPMC总线传输给ARM处理器。⑤ARM处理器内建2个大容量的数据缓冲区,一个采用FIFO原理,实时刷新保存0.5s的采样数据,作为数据记录信号到来前0.5s的数据;另一个用来保存数据记录信号到来后0.5s的数据。⑥在采集过程中,FPGA不断检测外部数据记录信号,当监测到数据记录信号后,FPGA通过ARM中断通知ARM 处理器数据记录信号到来。⑦ARM处理器响应数据记录信号,停止对前0.5s数据缓冲区的实时刷新,将数据存储位置换为第2个数据缓冲区,并且持续采样工作0.5s。⑧0.5s后ARM处理器将整个1s的采集数据作为1个数据记录存储到NANDFLASH中。⑨高速数据采集板内部建立防误触发机制,如果2次数据记录信号间隔小于0.5s,高速数据采集板将以最后一次的数据记录信号作为数据记录点。另外,在采集过程中,外部计算机可以通过ftp登陆到高速数据采集板并下载高速数据采集板中记录的数据文件。 3高速动车组牵引变流器关键数据记录及分析 3.1变压器轻量化设计 变流器通过安装固定支座安装变流器柜中,通过四个M16螺栓固定在柜体支撑梁上,其作用是实现电压变换,同时具备滤波的功能,其使用电路图如图3所示,电路中使用代号为T1。该变压器的工况为IEC60310:2004中规定的1类工况(正常工作制)。其空载变压比为1512Vrms:420Vrms,其输入电压为幅值3600V的PWM波。其轻量化从产品的线圈、磁芯、骨架入手,如线圈采用铝制,磁芯选择合适的大小,骨架在满足强度要求的基础上,采用合适的柜架结构,本变压器经过优化后从原来的820KG,减小到750KG,为整个变流器的轻量化提供支持。 3.2牵引仿真计算平台 针对高速列车牵引系统及其关键部件,建立了包括牵引变压器、牵引变流器、牵引控制装置等关键部件的仿真设计平台,可以完成牵引系统各部件的特性分析与设计优化,以支撑牵引系统和牵引变流器研发能力的提升。利用牵引仿真计算平台开展牵引系统方案设计,包括计算列车牵引功率、设计列车牵引制动特性及优化设计牵引变压器、牵引变流器、牵引电机等方案。 3.3有限元模型 考虑到变压器振动主要是影响靠近变压器端的柜体,建模时忽略远离变流器端柜体,并对内部一些的结构和部件进行简化处理,这样在不影响计算可靠性的前提下减少了工作量和计算成本。模型中板梁结构采用面单元,部分设备采用体单元,隔振器用三个方向的弹簧阻尼单元模拟,橡胶材料阻尼比假定为0.08,柜体顶部螺栓连接处采用刚性约束。 3.4牵引控制单元软件设计 (1)软件开发平台。牵引变流器的核心控制设备是TCU,而变流器的可靠性、可用性、可维护性和安全性(RAMS)指标很大程度上也受到软件设计影响。国外各大牵引系统供应商都具有成熟的、支持实时操作系统的软件开发平台。牵引控制单元除具备自主知识产权的控制单元硬件外,还自主开发了基于硬件的软件开发平台TKDET,支持图形化的编程,并具有自主知识产权的底层库。该开发平台使得软件编程分工明确,模块化、形式化/半形式化语言开发相结合,与国际标准相接轨。牵引控制单元软件设计完全基于自主研发的TKDET软件平台,软件层次清晰,逻辑分明,具有较好的可读性与可移植性。(2)半实物仿真平台。为了对控制单元的控制逻辑与控制策略进行分析,搭建了硬件在回路的DSPACE半实物仿真平台,该平台可实现实时快速在线仿真和离线仿真。在设计初期可以在该仿真平台进行控制软件的测试与验证。 3.5基于Labview的数据解析软件
地铁车辆牵引滤波装置
地铁车辆牵引滤波装置 摘要:本文介绍了地铁车辆牵引系统中的滤波装置。给出了滤波装置在牵引系统中的作用,组成结构以及工作原理,并且给出参数选择的公式。 关键词:地铁车辆;线路滤波器;牵引系统;滤波装置 Metro vehicle traction filtering device Chen HuiZhou Guangfu Tianjin Metro Operation Co. Ltd.Tianjin 300380 Abstract: This article introduces the traction system of the metro vehicle filter. Give the filtering device in the traction system, structure and working principle. As well gives the parameters of the formula. Keywords: metro traction system; line filter; filter 引言 地铁车辆在运行中频繁的启动、加速﹑惰性﹑制动等工况间转换,这将导致牵引负荷在时间上出现不均衡的特性,会引起一定的电压波动,在节假日等会表现出较大的电压偏差。另一方面,由于牵引电动机,变频器等负载设备的投入会产生大量的谐波电流这些都会对电网的电能质量造成影响。可以说地铁电网中的谐波和低功率因数问题,根源在于车辆本身。因此解决上述问题可以采取在电力机车内部装设补偿和滤波装置,采用多桥段顺序控制,或采用PWM变流器等方式。本文将介绍地铁车辆的牵引系统滤波装置。 1 滤波装置组成与结构 车辆滤波装置主要包括:线路滤波电抗器,滤波电容器。地铁城市轨道交通车辆的供电系统通常是从直流供电网中获取直流电压,通常电网直流电压经过牵引逆变器VVVF和辅助逆变器SIV交换输出不同的电压值,给列车上的设备供电。其中线路(滤波)电抗器和滤波电容器,使系统稳定并将直流侧电容电压波动限制在允许范围内,同时,滤除高次谐波,在逆变器发生短路时抑制短路电流并满足逆变器开关元件换流的要求等。 1.1 线路滤波电抗器总体结构
Buck电路闭环控制策略研究
编号 南京航空航天大学 电气工程综合设计报告题目Buck电路闭环控制策略研究 学生姓名班级学号成绩 张潼0311205 031120505 杨岚0311205 031120508 何晓微0311201 031120110 龚斌0311206 031120631 李博0311205 031020519 学院自动化学院 专业电气工程及其自动化 指导教师毛玲 二〇一五年一月
Buck电路闭环控制策略研究 摘要 首先,本文对Buck电路的3种闭环控制策略进行了原理分析,比较,并对Buck主功率级电路进行了原理分析和建模,最后完成主电路的参数设计。 其次,本文详细阐述了V2控制工作原理,推导V2控制环的传递函数,并且建立小信号模型,对控制器进行优化设计。最后使用SABER2007对BUCK电路的V2控制电路进行了时域频域仿真。 关键词:Buck电路,V2控制
目录 摘要 (i) Abstract ...................................................................................................... 错误!未定义书签。第一章概述......................................................................................................................... - 1 - 第二章Buck变换器控制方法简介……………………………………………………… 2.1电压型控制………………………………………………………………………………. 2.2电流型控制……………………………………………………………………………… 2.3 V2控制…………………………………………………………………………………… 第三章Buck变换器原理分析及建模……………………………………………………. 3.1 Buck 变换器传递函数…………………………………………………………………. 3.2Buck电路的边界条件……………………………………………………………………3.3主功率电路的参数设计……………………………………………………………….. 第四章V2控制电路分析及设计……………………………………………………….. 4.1V2控制原理分析 4.2 V2控制的buck变换器小信号模型 4.3V2控制器优化设计 第五章电路仿真………………………………………………………………………… 5.1V2控制策略频域仿真 5.2时域仿真电路和仿真波形
地铁车辆交流传动系统
本文简要的探讨了地铁车辆交流传动系统的组成、控制原理、牵引和电制动特性曲线,对地铁车辆的系统电路进行了简要的描述,分析了直流传动和交流传动的优缺点。 我国早期的地铁列车多为国产直流传动电动车组,采用凸轮调阻或斩波调阻的牵引控制方式,牵引电机为直流电机。而近几年建设的地铁项目均采用了进口交流传动电动车组,牵引控制方式为VVVF逆变器控制,牵引电机为异步电机。和直流传动系统相比,交流传动系统具有恒功速度范围宽、功率因数和粘着系数高、牵引电机结构简单和维修方便等优势。 1 交流传动系统的组成 地铁车辆和铁路机车在结构、系统集成上大不相同,机车是完整的牵引系统,和后面连接的载客(货)车厢相对独立;而地铁车辆则是编列成组,虽然分为动车和拖车两部分,但都是旅客车厢,动力系统均被分散安装于各车箱的地板下(动力分散)。 交流传动系统是以调压调频VVVF(Variable Voltage Variable Frequency)逆变器为核心的电传动系统。主要由高速断路器、滤波电抗器、VVVF逆变器和异步电动机等装置构成。地铁车辆交流传动系统的组成因生产厂家的不同及用户要求的不同而不相同,这里以六节编组的四动两拖(Tc+M+M+M+M+Tc)地铁车辆为例,简要探讨交流传动系统的组成。 下图为一个“两动一拖(2M1T)”单元主电路实例。电网经受电弓后分别经两台动车(B车和C车)的高速开关给逆变器供电,而在拖车(A车)上的辅助逆变器的供电是经过隔离二极管的。 下图为1C4M单元主传动系统原理电路图,1C4M是指一台VVVF逆变器给同一辆车四台相互并联的异步电动机供电的方式,也叫“车控”方式。其中滤波电抗器和滤波电容器构成线路滤波器。VVVF逆变器包含斩波器,斩波器由T7、T8构成,斩波器主要功能用于电阻制动,用它来调节制动电流大小,其另一个功能为过电压保护。 2 交流传动系统的控制原理 VVVF控制的基本原理为通过改变VVVF逆变器各IGBT元件的开通时间来改变负载的电压,通过改变VVVF逆变器各IGBT元件开通的周期来改变输出的频率。异步电动机的转矩公式为:T=K1·φ·Ir=K2·(V/fi)2·fs
地铁车辆电气牵引系统探讨
地铁车辆电气牵引系统探讨 发表时间:2016-11-28T10:05:55.653Z 来源:《基层建设》2015年33期作者:梁英才 [导读] 地铁车辆电气的牵引系统作为关系到车辆的行驶安全及性能的重要组成部分,对其进行研究具有重要意义。 深圳市地铁集团有限公司运营总部 摘要:近几年来地铁运营发展速度迅速,有效缓解了城市交通压力。地铁车辆电气的牵引系统作为关系到车辆的行驶安全及性能的重要组成部分,对其进行研究具有重要意义。本文主要对于深圳地铁车辆的电气牵引的特点、组件及牵引主电路等进行探讨。 关键词:地铁车辆;电气;牵引系统 一、牵引系统概述 深圳地铁1号线车辆采用四动两拖六编组形式(4M2T):=Tc-Mp-M+M-Mp-Tc=,其中Tc为有司机室的拖车、Mp为有受电弓的动车、M为无受电弓的动车;=为全自动车钩、+为半自动车钩、-为半永久牵连杆。列车由两个单元车组组成,每个单元车组由一辆拖车和两辆动车组成。控制方式为车控(1C4M)即每辆Mp/M车上设有1台牵引逆变器VVVF,驱动4个异步牵引电动机工作。列车采用架空接触网方式受电,额定电压DC1500V。牵引系统采用VVVF交流传动技术,具有防滑、防空转功能。每辆Tc车上设有1台辅助逆变器SIV,每个辅助逆 变器的输出分两路,一路输出为380V、50HZ三相交流电,用于辅助交流设备的供电,另一路为110V直流,用于直流控制设备的供电及蓄电池充电。 图1 电气牵引系统框图 图2 牵引传动系统 二、电气牵引系统的功能 牵引系统是地铁车辆的动力源,主要由VVVF逆变器和三相交流牵引电机组成。深圳地铁5号线部分车辆采用南车株洲时代的VVVF逆
国产化北京地铁列车牵引电传动系统设计
2006年第4期机车电传动№4,20061QQ!生!旦!Q旦呈兰呈竺!墨!!里垦!∑里!竺垦兰竺竺竺竺竺!!∑呈!!!!!!Q!!QQ! 摘要:简述采用交流传动的北京国产地铁列车的基本参数和性能要求,阐述了列车牵引电传动系统的牵引/电制动特性、主电路、列车牵引控制系统的设计思路和技术特点,并将北京国产地铁列车与目前北京市地铁13号线日立车辆进行了比较。北京国产地铁列车及牵引电传动系统已通过线路型式试验和运行考核,目前正在北京市地铁13号线试运行,运行情况良好。 关键词:北京;国产化地铁列车;牵引;电传动系统;交流传动 中图分类号:U266.2;U231文献标识码:A文章编号:1000—128X(2006)04—0031—06作者简介:陈文光(1966一).男,高级工程师,现从事地铁系统研究开发工作。 DesignofElectricDriveSystemforLocalized MetroVehicleinBeijing CHENWen-guang,DINGRong-jun (TechnologyCenter,ZhuzhouCSRTimesElectricCo.,Ltd.,Zhuzhou,Hunan412001,China)Abstract:BasicparametersandperformancerequirementsarebriefedfortheelectricdrivesystemoflocalizedmetrovehicleinBeijing.Alsoexpoundedarethetraction/brakingcharacteristics,powercircuitaswellasthedesignideasandtechnicalcharacteristicsofthecontrolsystem.ComparisonismadebetweenthelocalizedmetrovehicleandthevehiclebyHitachiforNo.13metrolineinBeijing.ThelocalizedvehicleanditselectricdrivesystemhaspassedthefieldtypetestandrunninginspectionandisundertrialoperationinNo.13metroline,ingoodcondition. Keywords:Beijing;localizedmetrovehicle;traction;electricdrivesystem;ACdrive 0引言 北京国产地铁列车是由中国交通运输协会城市轨道交通专业委员会组织,北京市地铁运营有限公司、长春轨道客车股份有限公司、北京地铁车辆厂、株洲时代集团(株洲电力机车研究所)联合研制开发的一列4节车编组的完全自主知识产权的交流传动国产地铁列车,其中,株洲时代集团负责交流电传动系统的研制。 1车辆参数及性能要求 1.1车辆基本参数 北京国产地铁列车车辆为B型车体,第三轨受流,供电电压:DC750V(DC500~900V);轮径:840/805/770mm(新/半磨耗/全磨耗);动车轴式:B。一B。;列车编组:Tc?M—M?Tc(2动2拖);车辆自重:动车35t,拖车30t;列车载客量(人数):额定载荷AW2时,动车 收稿日期:2006—06—08244人,拖车226人;超员载荷AW3时,动车310人,拖车290人。 1.2列车动力性能 列车在网压DC750V、半磨耗轮径805Innl、平直道线路运行情况下: 平均启动加速度(AW3) 0。40km/h,不小于0.83m/s2 0~80km/h,不小于0.5m/s2平均制动减速度(AW3) 常用制动不小于1.0m/s2 紧急制动不小于1.2m/s2电阻制动能力(AW2) 最高运行速度 冲击极限 平均技术速度 不小于0.8m/st50~5km/h) 80km/h 0.75m/s3 不低于50km/h(典型区间,不含站停时间)平均旅行速度不低=J:39km/h(平均站停时间30S) 城市轨道车辆 万方数据
控制策略
发动机电子控制系统的控制策略 摘要 汽油机电子控制系统的控制软件的各种控制方法,以及与特定汽油机匹配时各种参数的标定技术均被汽油机控制管理系统的供应商视为核心机密,很少有公开的资料。国产整车制造商要想真正有所发展,就必须解决国外对汽油机控制管理系统的技术封锁,设计出自己的控制管理系统。国家每年也不断加大对汽油机控制管理系统的研究的投入,以不断缩短在这方面与国外的差距。 关键字 引言 发动机的工作过程是一个非常复杂的燃烧过程也是热能与机械能的能量转换过程,影响发动机性能的主要因素是空燃比和点火定时,所以发动机控制的主要内容是空燃比和点火提前角,本章主要研究发动机的控制策略,以使发动机具有良好的动力性、经济性、排放性和起动性能。 国内的研究还主要集中在8位单片机,上述研究取得了不少成果,但生产的只是一些控制系统的原件还没有达到全部配套的水平。国外,在控制策略和理论方面,己由过去的简单的开环控制发展到闭环反馈控制,由传统的PID调节控制发展为模糊PID控制,自适应学习控制等等。而且电控系统不断向集成化、智能化发展,其控制精度越来越高,控制范围越来越广。 1、空燃比控制策略 从理论上讲,空燃比在14.7时,燃油可以完全燃烧,此时发动机具有较好的经济性和排放性,但考虑到发动机的综合性能,在不同的工作状况需要不同的空燃比.因此,燃油系统的功能是控制混合气的空燃比。 电控汽油机的空燃比控制策略按控制方式可以分为两种:开环控制和闭环控制。 在开环控制系统中,不需要将输出量的反馈量与输入量进行比较,因此开环控制容易实现,在发动机实际运行过程中,ECU依据当前工况查找喷油MAP得到相应的喷油脉宽值。再根据传感器检测的冷却水温度、进气温度、蓄电池电压、节气门开度等参数,对基本喷油脉宽进行修正,确定出最佳的喷油持续时间。开环控制具有方法简单、响应速度快的优点,但控制精度直接取决于ECU储存的基本数据的准确度、程序及处理方法的适用度、各种传感器的性能和精度,以及电磁喷油器的调整精度等。当喷油器和传感器性能发生变化时混合气就不能保持在原预设的空燃比上,其不能通过反馈进行喷油量的自行修正。因此,它对发动机及控制系统的各个组成部分精度要求高,无法对外界干扰因素进行补偿修正,系统需要非常强的抗干扰能力,当使用工况超过预定范围时,不能实现有效的控制 闭环控制方式闭环控制是在开环控制的基础上增加反馈回路形成的,闭环控制通过对发动机的性能参数进行不断的检测,通过检测到的系统输出量主动修正控制量。闭环控制方式是在排气管上加装一个氧传感器,以随时检测废气中的氧含量,并将检测结果转变为电信号及时反馈给ECU。ECU根据电压值的大小可随时修正喷入的燃油量。 但不是在所有的工况都可以采用闭环控制,在起动工况、全负荷工况、瞬态工况、断油工况、氧传感器(EOO)故障等运行状况时,系统将进入开环控制,这是因为氧传感器己经不能够正确的反映混合气的空燃比。要进行空燃比闭环控制,必须配备反馈空燃比信息的氧传感器EGO。闭环控制的目的是为了混合气的空燃比维持在理想空燃比附近,以保持三元催化器的最高转化效率。所以,空燃比闭环控制必须有三元催化器。 闭环控制的优点是:空燃比控制精度高,可消除因发动机元器件质量、装配误差和磨损等。汽油机电控燃油喷射系统ECU技术使工作稳定性好,抗干扰能力强。总之,虽然闭环控制方式有许多有点,但也有不足之处,例如控制周期长,且有滞后现象。从混和气形成并吸入气缸,经过燃烧,排气,再经氧传感器检出排气中的含氧浓度,需要一定的时间,即存在时间滞后。因此,实际闭环控制中,混和气的空燃比总保持在理论空燃比附近的一个很窄的范围内即在14.7附近,以使三元催化装置对排气净化处理达到最效果。 在实际中,开环控制方式或闭环控制方式是要根据发动机的具体工况,一般在起动期间、冷却水温度较低时、暖机期、加减速工况、负荷、断油控制或在氧传感器准备不充分或发生故障时,需要控制系统停止反馈控制,采用开环方式提供较浓的混合气来保证发动机的种性能。其他稳定工况采用闭环控制。因此,发动机电控汽油喷射系统中,一般采用开环与闭环控制相结合的混合控制方式。
双闭环控制器设计方法
3.2.2 电流的直接控制 电流直接控制,就是采用跟踪型的PWM 控制技术对电流波形的瞬时值进行反馈控制,可以采用滞缓比较方式,也可采用三角波比较方式,进行电流的直接控制。采用PWM 技术的直接控制方法从原理上来说可以有效地滤除系统中的无功电流和全部有害电流。与间接控制方法相比较,直接控制方法具有更高的响应速度和控制精度,但它要求开关频率高,因为大功率器件很难以高开关频率运行,因此不采用电流直接控制。一般来说,电流直接控制适合于小功率场合。但从目前世界上运行的无功补偿器的情况看来,电流直接控制在中、大容量系统也有应用。日本新农用于输电80Mvar 的SVG 和日本神户用于钢厂负荷补偿20Mvar 的SVG 均采用了电流直接控制方式。前者在电网严重不对称,甚至短路时仍可照常工作;后者对炼钢电极短路引起的电网电压闪变有很好的抑制作用。电流直接控制的SVG 控制系统有两种基本结构:1.滞环比较控制;2.电压电流双闭环控制. 本文主要讨论电压电流双闭环控制方法。控制结构如图3.2所示,采用了dq 轴下的瞬时控制系统。SVG 发出的电流瞬时值经dq0坐标变换变为d i q i 0i ,与有功电流、无功电流参考值作比较后,经PI 调节器所得值,再经dq0反变换,得到三相电压信号,进行三角波比较电流跟踪型PWM 控制。其中,有功电流参考值由直流侧电压参考值与直流侧电容电压反馈值比较后经PI 调节器得到。由于 参考值*d i 和* q i ,和反馈值d i q i 在稳态时均为直流信号,因此通过PI 调节器可以实 现无稳态误差的电流跟踪控制。即此方法中采用了双闭环反馈控制,内环是电流环控制,外环是电压环控制。
地铁车辆电气牵引系统的设计及应用
地铁车辆电气牵引系统的设计及应用 摘要:城市建设过程中地铁的发展是城市交通当中相当重要的一个环节,也是 现在能够有效的解决交通拥堵问题的重点措施之一,在这一过程中牵引传动系统 是地铁运行过程中最为核心的一个关键技术,文章就此进行分析。 关键词:地铁车辆;电气牵引;地铁设计 1 前言 地铁进行设计的过程中牵引系统的设计会直接影响到地铁运行的动力,并关 系到地铁运行过程中的安全性和效率问题,因而有着重要的意义,文章分析了相 关的结构设计和应用作用,希望能够促进后续地铁车辆的系统更新过程。 2 城市轨道交通车辆电气系统简介 城市轨道交通车辆电气系统关系到车辆的控制和行驶,必须结合特定城市的 环境要求来进行设施布置,并结合复杂的电气系统进行恰当的分析。对电气系统 采取接地措施则是保证城市轨道交通车辆安全行驶的重要方式,也会影响城市轨 道交通运输方式的正常运行。所以城市轨道交通车辆电气系统要从多个阶段进行 控制,避免技术人员进行城市轨道交通车辆电气系统的规划设计时出现疏忽导致 设备及线路连接方式不合理,同时要注意在城市轨道交通车辆运行过程中定期进 行电气系统的检修,加强电气系统维护管理,降低电气系统运行过程中出现问题 风险,甚至由于城市轨道交通车辆电气系统的故障造成严重的经济损失和安全事故。 因此,研究城市轨道交通车辆电气系统的设备组成和线路连接等方式很有必要,既能够保证城市轨道交通车辆电气系统稳定运行,还能够为电气系统的接地 措施奠定基础。研究城市交通车辆电气系统接地措施需要明确轨道车辆电气设备 在工作接地、屏蔽接地以及安全接地等不同阶段的接地问题,分析出现问题的原 因并寻找解决办法,并辅以科学技术手段和合理的管理计划进行电气系统维护, 才能促进我国城市轨道交通车辆的稳定行驶,增强城市轨道交通车辆运行的安全 可靠性,从而发挥城市轨道交通车辆的有效价值。 3 城市轨道交通车辆电气系统组成部分 城市轨道交通车辆电气系统是驱动车辆行驶的先行条件,完善的组成结构才 能提高电气系统的工作效率,城市轨道交通车辆由牵引制动控制系统、辅助供电 系统、车门控制系统三个主要部分组成。 3.1 牽引制动控制系统 牵引制动控制系统包括牵引和制动两个功能部分,是轨道车辆工作时不可缺 少的两个部分。两者结合实现车辆控制,而两者结合所表现出来的功能效果则直 接反应在车辆运行中。实际轨道车辆行驶过程控制中,需要通过改变单次城市轨 道车辆的牵引加速度和制动减速度来协调车辆的周期性行驶,尽量平衡不同车辆 的行驶时间差,从而保证乘坐城市轨道交通车辆的人员能够更好的安排时间、利 用时间,进一步提升城市轨道车辆运行效率。 3.2 辅助供电系统 辅助供电系统则是城市轨道交通车辆电气系统的动力来源,其主要由两部分 设施组成,一部分是以直流供电系统为基础的三相交流电源支持的供电设备系统,直流供电系统包括用电设施、充电机器、蓄电池以及整流装备三个基础部分,利 用充电机器和蓄电池实现设备系统的供电功能;另一部分是将三相交流的供电设 施功能化,使城市轨道交通车辆上的其他设备借助变流机器的通风机、电机通风