光电编码器的特性及应用

The properties and application of photoelectric encoder The working principle, photoelectric encoder
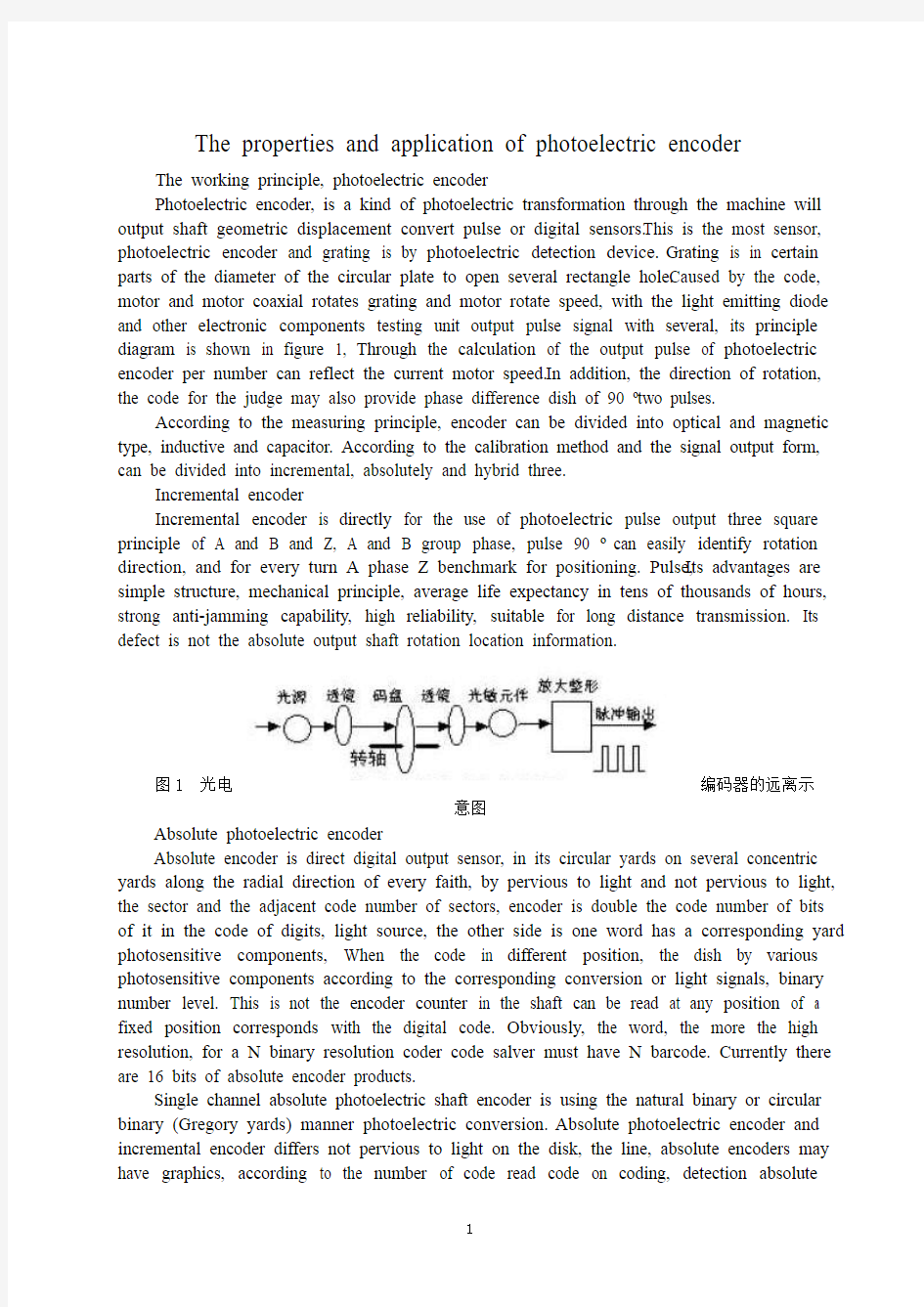
Photoelectric encoder, is a kind of photoelectric transformation through the machine will output shaft geometric displacement convert pulse or digital sensors.This is the most sensor, photoelectric encoder and grating is by photoelectric detection device.Grating is in certain parts of the diameter of the circular plate to open several rectangle hole.Caused by the code, motor and motor coaxial rotates grating and motor rotate speed, with the light emitting diode and other electronic components testing unit output pulse signal with several, its principle diagram is shown in figure 1, Through the calculation of the output pulse of photoelectric encoder per number can reflect the current motor speed.In addition, the direction of rotation, the code for the judge may also provide phase difference dish of 90 o two pulses.
According to the measuring principle, encoder can be divided into optical and magnetic type, inductive and capacitor. According to the calibration method and the signal output form, can be divided into incremental, absolutely and hybrid three.
Incremental encoder
Incremental encoder is directly for the use of photoelectric pulse output three square principle of A and B and Z, A and B group phase, pulse 90 ocan easily identify rotation direction, and for every turn A phase Z benchmark for positioning. Pulse,Its advantages are simple structure, mechanical principle, average life expectancy in tens of thousands of hours, strong anti-jamming capability, high reliability, suitable for long distance transmission. Its defect is not the absolute output shaft rotation location information.
图1 光电编码器的远离示
意图
Absolute photoelectric encoder
Absolute encoder is direct digital output sensor, in its circular yards on several concentric yards along the radial direction of every faith, by pervious to light and not pervious to light, the sector and the adjacent code number of sectors, encoder is double the code number of bits of it in the code of digits, light source, the other side is one word has a corresponding yard photosensitive components, When the code in different position, the dish by various photosensitive components according to the corresponding conversion or light signals, binary number level. This is not the encoder counter in the shaft can be read at any position of a fixed position corresponds with the digital code. Obviously, the word, the more the high resolution, for a N binary resolution coder code salver must have N barcode. Currently there are 16 bits of absolute encoder products.
Single channel absolute photoelectric shaft encoder is using the natural binary or circular binary (Gregory yards) manner photoelectric conversion.Absolute photoelectric encoder and incremental encoder differs not pervious to light on the disk, the line, absolute encoders may have graphics, according to the number of code read code on coding, detection absolute
position.Code design can use binary code, circulation, binary complement, etc. Its features are:
Can read Angle of absolute coordinates directly.
No accumulative error.
Power excision location information would be lost. But the resolution is determined by the binary digits, i.e., precision depends on the median 10, 14 etc.
Hybrid absolute encoder.
Hybrid absolute encoders, its output of two groups: a group of information, information for testing poles with absolute information function, Another group of incremental encoder is completely with the output information.
Photoelectric encoder is an Angle (angular velocity) detection device, it will input shaft Angle for, using the principle of photoelectric convert electrical or digital accordingly, small size, high accuracy, high reliability, digital interface, etc. It is widely applied in nc machine tools, turning machine, servo drive, robots, radar and military targets were needed in the Angle of device and equipment.
Applied circuit of photoelectric encoder
EPC - 755A application of photoelectric encoder
EPC - 755A photoelectric encoder and the use of good performance in Angle measurement, displacement measurement, and has strong anti-jamming capability of the output pulse signal is stable and reliable, and the pulse signal can be obtained by counting were measured after the digital signal. Therefore, we in the car driving simulators, steering wheel rotation Angle measurement chooses EPC - 755A photoelectric encoder, the output circuit as sensors, choose open collector output resolution selection 360 pulse/circle, considering the steering wheel rotation is a two-way street, clockwise and counterclockwise, can also needs to the output signal phase coder to count. Figure 2 shows the actual use of photoelectric encoder and discrimination, phase two-way counts circuit with a D flip-flop circuit and two cross-coupled nand gates, with 74LS193 3 counts circuit.
图2 光电编码器鉴相计数电路
When the photoelectric encoder clockwise, channel, A leading channel output waveform of output waveform B 90 °, D flip-flop output waveform W1) for Q (high level, Q (W2) for low-level waveform cross-coupled nand gates, open, counting pulse waveform W3) by (bidirectional, send to the 74LS193 counter CU input pulses, add count, At this time, below, its output cross-coupled nand gates close for high level (waveform W4). When the photoelectric encoder counter-clockwise, channel A output waveform of output waveform delay than channel B 90 °, D flip-flop output waveform W1) for Q (low level, Q (W2) for high level waveform, the output cross-coupled nand gates close, high level (waveform W3), Now, two cross-coupled nand gates open, counting under impulsive through (waveform W4), send to two-way 74LS193 counter reduced input pulses, CD. Subtraction.
Steering wheel clockwise and counter-clockwise, the maximum rotation Angle for two laps, choose resolution for 360 pulse/circle of the output pulse coder, its biggest for 900, Actual use three slices of counts circuit 74LS193 component in the system of initialization, the signal reset (CLR), the initial set for 800H, namely 2048 (LD); the signal, So, when the steering wheel clockwise, count the output circuit for 2048 ~ 2948, when steering counter-clockwise, count the output circuit for 2048-804, D0 output data counts circuit D11 ~ to data processing circuit.
In practice, the steering wheel frequently made clockwise and counterclockwise rotation, because existence, work longer quantization error after a period of time, the steering wheel when the output of a circuit to count, but may not 2048 several words deviation, To solve this
problem, we added a steering wheel to detect circuits, systems, data processing circuit after work on the operation state in the simulator, system test in the back, if detection circuit in the back wheel, and counts circuit in the data output, but not to count 2048 reset circuit, and the initial reset.
Photoelectric encoder gravity measurement instrument in the application
The rotary photoelectric encoder, the shaft and gravity measuring instrument for knob shaft. Gravity measurement of the angular displacement volume knob compensation for a signal is transformed, Rotary photoelectric encoder and absolute encoder two points and incremental encoder.
Incremental encoder is the output pulse form, its code plate sensor than absolute encoder code easier to disk and higher resolution. Generally need only three barcode, here's code has not actually had word of absolute encoder code, but produce counting pulse. It's code of WaiDao and middle way has the same number of uniform distribution of not pervious to light and sector (raster), but is two sector mutual stagger half area. When the code salver, turning the output signal is A difference for 90 ° with B in the pulse signal and only one third of the slit pervious word code generated by the pulse signal (it as the benchmark code salver position, to provide an initial counting system of zero signal). From A, B two output signal phase relationship (ahead or behind) can judge the direction of rotation. Graph 3 by (a), when the code dish is a word, pulse than B ground PI / 2, and reverse, a word than B lagging ways pulses PI / 2. Figure 3. (b) is A practical circuit, use A word of plastic wave along the steady-state produces single trigger word and b are pulse wave phase 'and' plastic disc, when the code is only positive mouth pulse output, whereas only reverse mouth pulse output. Therefore, the increment of the output pulse coder is according to the source and pulse count to determine the direction and the code salver. Relative angular Usually, if the encoder has N (yards), its output signal phase difference of PI/N, may count for the number of times the grating 2N pulse, N = 2. Figure 3 circuit faults are sometimes mistake pulse, this error in a signal in a high "or" low ", and "level other signal is in" high "and" low "and change of state, though code salver, but will produce a shift in the output pulse. For example, code salver or manual alignment occurs jitter position (below can see, in spring gravimeters measurement will have this kind of case).
图3 增量光电编码器基本波形和电路
图4 四倍计数方式的波形和电路
Figure 4 is a can prevent error and can improve the resolution of the pulse frequency subdivision circuit four times. Here, the function of memory is D flip-flop and clock generator. Figure 4 shows, by every two D flip-flop, so take in the clock pulse, the interval of two Q end (such as the corresponding B 74LS175 2, 7 foot) maintain two clock period, if both input status, said the change in, Otherwise, can according to the relationship between the changes from the party, which is "to" or "backward" output pulse. When a word because of high vibration in the ' ', 'low ", will change between reciprocating alternate "positive" and "backward" pulse, the two counter on the number and replace them when they can eliminate the shadow ring (below instrument readings will involve this). Thus, the clock generator frequency of vibration frequency may be greater than the maximum. Can see from figure 4, a pulse signal of the cycle, four counts pulse. For example, the number of every lap pulse coder for 1000 produce four times the number of pulse frequency, and its resolution is 4000 for 0.09 degree. Actually, this kind of sensor products will enlarge the output signal of photosensitive components such as plastic circuit and sensor encapsulation testing components together, so just add subdivision and counts circuit can form a angular measurement system (74159 is 4-16 decoder).
Application problem analysis and improvement measures
Application problem analysis
Photoelectric detection devices transmit and receive devices are installed in the production and use of exposed many defects, its internal factors have external factors, which is mainly embodied in the following aspects:
Devices or accept device for mechanical vibration, caused by the shift or offset, receiving devices not reliable to receive light signals, but cannot produce signals. For example, Photoelectric encoder used in steel rolling speed regulation systems, because of photoelectric encoder is bolted directly in motor shell, photoelectric encoder shaft through hard shrapnal and motor rotor connections, because motor with load is a load of impact, while rolling steel rotor motor will have caused the shell and vibration. According to the mensuration, After steel time electricity encoder vibration velocity for 2.6 mm/s, this can damage the vibration velocity of photoelectric encoder internal functions. A pulse, thereby causing instability in control system, or misoperation cause accidents.
Because of photoelectric detection device installed in production, production environment factors in photoelectric detection devices not reliable work. Such as the installation position of high temperature, humidity, photoelectric detection device to internal electronic components characteristics change or damage. For example in continuous caster send analyzed.essential tracking system, because of photoelectric detection equipment installation location near the slab, high temperature environment caused by photoelectric detection device signal or damage caused by accidents or production.
Production site for all kinds of electromagnetic interference source photoelectric detection device, of interference, photoelectric detection device of output waveform distortion distortion occurs, the system maloperation accident or production. For example, Photoelectric detection device installed in the production equipment of the signal, the body to the control system of the cable transmission distances in 20-100 meters, cable, although usually choose multiple shielded cable conductor, but due to cable capacitance between lines of resistance and impact plus and other cable laying together, vulnerable to all sorts of electromagnetic interference effect, thus causing waveform distortion, thus to drive system feedback signal and practical value deviation, and cause the system precision.
Measures for improvement
Change of photoelectric encoder installation. Photoelectric encoder is not installed in motor shell, but in the motor based on a fixed bracket to independent installation photoelectric encoder, photoelectric encoder axis and motor shaft center must at the same level, two axis adopt soft rubber or nylon hose connection, to reduce the impact of photoelectric encoder motor load of mechanical shock. By this way after vibration testing, the vibration velocity to 1.2 mm/s.
Reasonable choice of photoelectric detection device, the output signal transmission medium by twisted-pair cable instead of ordinary shield cable. Twisted-pair cable has two important characteristics of cable, one is by electromagnetic interference with strong protection ability, because the space of electromagnetic interference current online can cancel each other out. Twisted-pair cable is another technical characteristics of two mutually twisted line spacing is small, after two lines of interference lines distance equal to two lines, basic capacitance of shielding network basic and same, it is to restrain common-mode interference effect more apparent.
Using PLC software to monitor or interference. In the continuous process analyzed.essential photoelectric detection device has the timing signal, at the same time, the whole process of signal and corresponding different stages. As shown in figure 5.
图5 送引锭过程和光电信号关系
1 send analyzed.essential before starting the process, photoelectric signal 1 "1".
2 after the start sending analyzed.essential process, in A stage, roller, start sending bar. When the lever block photoelectric device analyzed.essential emit light, the photoelectric signal for "0", When light guide bar through central 2 small round hole, photoelectric device sends a signal to 2 and 3, "1".
3 analyzed.essential sent in B stage, the process of photoelectric signal for "0", roller suspension bar, stop sending, fan-shaped 10 section pressure straightening machine, pull. "and" 1 ", synchronous bar to give.
4 analyzed.essential sent in C stage, process, and no longer bar ceiling light, photoelectric signal four blocks for "1", "2", "stop synchronous synchronous 1," lead bar to give. This work is over optoelectronic device.
According to the light of electrical device testing work process, as long as the scene of sending analyzed.essential each photoelectric signal process, based on the time analyzed.essential process and photoelectric signal relationship, using PLC application of relevant data, prepare to meet the requirements of PLC program, PLC program output signal input to the input module, instead of PLC original photoelectric signal input signal. The program diagram shown in figure 6.
Conclusion
Photoelectric detection device is itself by electronic components, it is certain to installation environment of technical requirements, especially in a bad environment, should take corresponding measures to protect the photoelectric detection device to make the product requirements in the work condition, can play the technical characteristics of the device. Otherwise, the service life of photoelectric detection device and reliability of work may be subjected to the influence of different level. Combination of photoelectric detection device in the production process control in the application practice, the design of control system, Using photoelectric detection device is an important signal as the control signal, photoelectric device to avoid sudden damage or work environment temperature, unstable (large, mechanical vibration, humidity etc) and external touch other equipment accidents. In the application of PLC program control system suitable for process control of reality, to overcome the monitor or interfere with the system adopts photoelectric device for the existence of various defects, is to improve the reliability of the system is effective.
光电编码器的特性及应用
光电编码器的工作原理
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
增量式编码器
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。
图1 光电编码器原理示意图
绝对式编码器
绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有 N 位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:
可以直接读出角度坐标的绝对值;
没有累积误差;
电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。
混合式绝对值编码器
混合式绝对值编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
光电编码器是一种角度(角速度)检测装置,它将输入给轴的角度量,利用光电转换原理转换成相应的电脉冲或数字量,具有体积小,精度高,工作可靠,接口数字化等优点。它广泛应用于数控机床、回转台、伺服传动、机器人、雷达、军事目标测定等需要检测角度的装置和设备中。
光电编码器的应用电路
EPC-755A光电编码器的应用
EPC-755A光电编码器具备良好的使用性能,在角度测量、位移测量时抗干扰能力很强,并具有稳定可靠的输出脉冲信号,且该脉冲信号经计数后可得到被测量的数字信号。因此,我们在研制汽车驾驶模拟器时,对方向盘旋转角度的测量选用EPC-755A光电编码器作为传感器,其输出电路选用集电极开路型,输出分辨率选用360个脉冲/圈,考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号鉴相后才能计数。图2给出了光电编码器实际使用的鉴相与双向计数电路,鉴相电路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成。
图2 光电编码器鉴相计数电路
当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门
关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,D触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。
汽车方向盘顺时针和逆时针旋转时,其最大旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其最大输出脉冲数为900个;实际使用的计数电路用3片74LS193组成,在系统上电初始化时,先对其进行复位(CLR信号),再将其初值设为800H,即2048(LD信号);如此,当方向盘顺时针旋转时,计数电路的输出范围为2048~2948,当方向盘逆时针旋转时,计数电路的输出范围为2048~1148;计数电路的数据输出D0~D11送至数据处理电路。
实际使用时,方向盘频繁地进行顺时针和逆时针转动,由于存在量化误差,工作较长一段时间后,方向盘回中时计数电路输出可能不是2048,而是有几个字的偏差;为解决这一问题,我们增加了一个方向盘回中检测电路,系统工作后,数据处理电路在模拟器处于非操作状态时,系统检测回中检测电路,若方向盘处于回中状态,而计数电路的数据输出不是2048,可对计数电路进行复位,并重新设置初值。
光电编码器在重力测量仪中的应用
采用旋转式光电编码器,把它的转轴与重力测量仪中补偿旋钮轴相连。重力测量仪中补偿旋钮的角位移量转化为某种电信号量;旋转式光电编码器分两种,绝对编码器和增量编码器。
增量编码器是以脉冲形式输出的传感器,其码盘比绝对编码器码盘要简单得多且分辨率更高。一般只需要三条码道,这里的码道实际上已不具有绝对编码器码道的意义,而是产生计数脉冲。它的码盘的外道和中间道有数目相同均匀分布的透光和不透光的扇形区(光栅),但是两道扇区相互错开半个区。当码盘转动时,它的输出信号是相位差为90°的A相和B相脉冲信号以及只有一条透光狭缝的第三码道所产生的脉冲信号(它作为码盘的基准位置,给计数系统提供一个初始的零位信号)。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。由图3(a)可见,当码盘正转时,A道脉冲波形比B道超前π/2,而反转时,A道脉冲比B道滞后π/2。图3(b)是一实际电路,用A道整形波的下沿触发单稳态产生的正脉冲与B道整形波相‘与’,当码盘正转时只有正向口脉冲输出,反之,只有逆向口脉冲输出。因此,增量编码器是根据输出脉冲源和脉冲计数来确定码盘的转动方向和相对角位移量。通常,若编码器有N 个(码道)输出信号,其相位差为π/ N,可计数脉冲为2N倍光栅数,现在N=2。图3电路的缺点是有时会产生误记脉冲造成误差,这种情况出现在当某一道信号处于‘高’或‘低’电平状态,而另一道信号正处于‘高’和‘低’之间的往返变化状态,此时码盘虽然未产生位移,但是会产生单方向的输出脉冲。例如,码盘发生抖动或手动对准位置时(下面可以看到,在重力仪测量时就会有这种情况)。
图3 增量光电编码器的基本波形和电
路
图4 四倍计数方式的波形和电
图4是一个既能防止误脉冲又能提高分辨率的四倍频细分电路。在这里,采用了有记忆功能的D型触发器和时钟发生电路。由图4可见,每一道有两个D触发器串接,这样,在时钟脉冲的间隔中,两个Q端(如对应B道的74LS175的第2、7引脚)保持前两个时钟期的输入状态,若两者相同,则表示时钟间隔中无变化;否则,可以根据两者关系判断出它的变化方向,从而产生‘正向’或‘反向’输出脉冲。当某道由于振动在‘高’、‘低’间往复变化时,将交替产生‘正向’和‘反向’脉冲,这在对两个计数器取代数和时就可消除它们的影响(下面仪器的读数也将涉及这点)。由此可见,时钟发生器的频率应大于振动频率的可能最大值。由图4还可看出,在原一个脉冲信号的周期内,得到了四个计数脉冲。例如,原每圈脉冲数为1000的编码器可产生4倍频的脉冲数是4000个,其分辨率为0.09°。实际上,目前这类传感器产品都将光敏元件输出信号的放大整形等电路与传感检测元件封装在一起,所以只要加上细分与计数电路就可以组成一个角位移测量系统(74159是4-16译码器)。
应用中问题分析及改进措施
应用中问题分析
光电检测装置的发射和接收装置都安装在生产现场,在使用中暴露出许多缺陷,其有内在因素也有外在因素,主要表现在以下几个方面:
发射装置或接受装置因机械震动等原因而引起的移位或偏移,导致接收装置不能可靠的接收到光信号,而不能产生电信号。例如;光电编码器应用在轧钢调速系统中,因光电编码器是直接用螺栓固定在电动机的外壳上,光电编码器的轴通过较硬的弹簧片和电动机转轴相连接,因电动机所带负载是冲击性负载,当轧机过钢时会引起电动机转轴和外壳的振动。经测定;过钢时光电编码器振动速度为2.6mm/s,这样的振动速度会损坏光电编码器的内部功能。造成误发脉冲,从而导致控制系统不稳定或误动作,导致事故发生。
因光电检测装置安装在生产现场,受生产现场环境因素影响导致光电检测装置不能可靠的工作。如安装部位温度高、湿度大,导致光电检测装置内部的电子元件特性改变或损坏。例如在连铸机送引锭跟踪系统,由于光电检测装置安装的位置靠近铸坯,环境温度高而导致光电检测装置误发出信号或损坏,而引发生产或人身事故。
生产现场的各种电磁干扰源,对光电检测装置产生的干扰,导致光电检测装置输出波形发生畸变失真,使系统误动或引发生产事故。例如;光电检测装置安装在生产设备本体,其信号经电缆传输至控制系统的距离一般在20—100米,传输电缆虽然一般都选用多芯屏蔽电缆,但由于电缆的导线电阻及线间电容的影响再加上和其它电缆同在一起敷设,极易受到各种电磁干扰的影响,因此引起波形失真,从而使反馈到调速系统的信号与实际值的偏差,而导致系统精度下降。
改进措施
改变光电编码器的安装方式。光电编码器不在安装在电动机外壳上,而是在电动机的基础上制作一固定支架来独立安装光电编码器,光电编码器轴与电动机轴中心必须处于同一水平高度,两轴采用软橡胶或尼龙软管相连接,以减轻电动机冲击负载对光电编码器的机械冲击。采用此方式后经测振仪检测,其振动速度降至1.2mm/s。
合理选择光电检测装置输出信号传输介质,采用双绞屏蔽电缆取代普通屏蔽电缆。双绞屏蔽电缆具有两个重要的技术特性,一是对电缆受到的电磁干扰具有较强的防护能力,因为空间电磁场在线上产生的干扰电流可以互相抵消。双绞屏蔽电缆的另一个技术特点是互绞后两线间距很小,两线对干扰线路的距离基本相等,两线对屏蔽网的分布电容也基本相同,这对抑制共模干扰效果更加明显。
利用PLC软件监控或干涉。在连铸生产的送引锭过程要求光电检测装置产生有时序性的电信号,同时,该信号与整个过程不同阶段相对应。如图5。
图5 送引锭过程和光电信号关系
①送引锭过程启动前,光电信号1为“1”。
②送引锭过程启动后,在A阶段,辊道启动,引锭杆上送。当引锭杆挡住光电装置发射出的红外光时,光电信号为“0”;当红外光透过引锭杆中部2个小圆孔时,光电装置发出信号2和3,均为“1”。
③送引锭过程在B阶段,光电信号为“0”,辊道停下,引锭杆暂停上送,扇形10段压下,启动拉矫机和“同步1”,引锭杆继续上送。
④送引锭过程在C阶段,引锭杆上送,并不再挡住红外光,光电信号4为“1”,启动“同步2”,停下“同步1”,引锭杆继续上送。至此光电装置工作过程结束。
根据光检测电装置的工作过程,只要现场测定送引锭过程中各个光电信号发生的时间,结合送引锭过程与光电信号的关系,利用PLC应用程序中的相关数据,编制符合要求的PLC程序,将PLC程序输出信号输入至PLC的输入模块,替代原光电信号的输入信号。其程序框图如图6所示。
图6 程序框图
结束语
光电检测装置本身是由电子元器件构成,它对安装环境有一定的技术要求,特别是在较恶劣环境下使用,要采取相应的保护措施,以使光电检测装置工作在其产品要求的技术条件下,才能发挥装置的技术性能。否则光电检测装置的使用寿命及其工作的可靠性都将受到不同程度的影响。结合光电检测装置在生产过程控制中的应用实践,在控制系统设计中;不宜采用光电检测装置的信号作为重要的控制信号,以避免光电装置突然损坏或工作不稳定(环境高温、湿度大、机械振动、外力碰创等)引起其它设备事故。在控制系统中应用PLC程序实适进行过程控制的监控或干涉,以克服了因系统中采用光电装置而存在的各种缺陷,是提高系统可靠性的有效途径。
光电效应的应用
University 《近代物理实验》课程论文 光电效应的应用 学院: 专业: 学号: 学生姓名: 指导教师: 二〇一四年五月
光电效应的应用 1887年赫兹在做电磁波的发射与接收实验中,他发现当紫外光照射到接收电极的负极时,接收电极间更易于产生放电,即光生电。1900年普朗克在研究黑体辐射问题时,将能量不连续观点应用于光辐射,提出了“光量子”假说,从而给予了光电效应正确的理论解释。1905年爱因斯坦应用并发展了普朗克的量子理论,首次提出了“光量子”的概念,并成功地解释了光电效应的全部实验结果。密立根经过十年左右艰苦的实验研究,于1916年发表论文证实了爱因斯坦方程的正确性,并精确地测定了普朗克常数。 光电效应实验和光量子理论在物理学的发展史中具有重大而深远的意义。如今光电效应已经广泛地应用于现代科技及生产领域,利用光电效应制成的光电器件(如光电管、光电池、光电倍增管等)已广泛用于光电检测、光电控制、电视录像、信息采集和处理等多项现代技术中。 1.光控制电器 在工业制造上,大部分光电控制的设备都要用到光控制电器。它包括电磁继电器、光电管、放大电路和电源等部件。如下图所示,当有光照在光电管K上时,便产生了电流,经过放大器后,使电磁铁M磁化,从而把衔铁N吸住。而当K上没光照射时,光电管电路就没有了电流,这时M和N便会自动离开。在实际的应用中,为了使射出的光线是一束平行光,我们把光源装在平行光管内,这样的平行光管在工程上称为发射头。光电管(多数情况下是用光敏二极管)也装在一个光管内(管末端装有聚光透镜),这种管在工程上称为接受头。 利用光电管制成的光控制电器,可以用于自动控制,如自动计数、自动报警、自动跟踪等等。如记录生产线上的产品件数。我们把产品放在传送带上,跟着传送带一起运动。在传送带的两则分别装上发射头和接收头。发射头所发射的平行光正好射入接收头。这时从发射头发出的光线射入接收头时,电路中所产生的电流,经过放大器放大,使电磁铁M磁化,吸引衔铁N,这时计数器的齿轮被卡住,计数器不发生动作。每逢产品把光线挡住的时候,电路中的电流就会消失,电磁铁自动放开衔铁,使计数器的齿轮转过一齿。这样,计数就自 动地把产品的数目记录下来。]1[ 2.光电倍增管在电视图像中应用
-光电探测器原理
上海大学2014 ~2015学年春季学期本科生课程考试 小论文 课程名称:电子科学与技术新探索(专题研讨课) 课程编号: 10426056 论文题目: 光电探测器原理 本科生生姓名: 陆申阳学号: 12121765 论文评语: 成绩: 任课教师: 徐闰 评阅日期:
光电探测器原理原理 姓名:陆申阳 学号:12121765 摘要:光电探测器的原理主要是利用光电效应和光热效应。对于不同类型的光电探测器,他们的工作原理也不尽相同。本文以雪崩光电二极管、光电二极管、光热探测器为例具体介绍了它们们的工作原理。 Abstract:The primary principle of photodetector are photoelectric effect and photothermal effect.But,there are some distinctions of different photodetectors.The principles of photodiode,avalanche photodiode and optothermal detector are as follows. 关键词:雪崩光电二极管,光电二极管,热敏电阻,光电效应 Key words:avalanche photodiode,photodiode,photoelectric effect 简介:近年来,光电子系统已经运用到各个行业、各个领域。对于光电子系统,其最最重要的一部分光电探测器一直作为光电子系统的眼睛而存在。对于光电探测器,按照其辐射作用方式的不同,整体上可以分为光子探测器和光热探测器。按照具体的工作机理,光子探测器又可以分为光电导探测器、光敏电阻、雪崩光电二极管、光电二极管、光电发射探测器、光电管等;光热探测器可以分为热敏电阻、热电偶等。以下分别以光电二极管、雪崩光电二极管、热敏电阻为例具体介绍其工作原理。 一、光电二极管(PD) (一)、原理 光电效应可以分为内光电效应和外光电效应,内光电效应又可以分为光电导效应和光生伏特效应。 光电二极管的基本原理就是利用了光生伏特效应。光辐射照射半导体结上时,光子降价电子激发到导带,形成光生电子——空穴对,光生电子——空穴对在自建电场的作用下被分别扫向两端,形成光生电动势。即光生伏特效应。
编码器使用教程与测速原理
编码器使用教程与测速原理 我们将通过这篇教程与大家一起学习编码器的原理,并介绍一些实用的技术。 1.编码器概述 编码器是一种将角位移或者角速度转换成一连串电数字脉冲的旋转式传感器,我们可以通过编码器测量到底位移或者速度信息。编码器从输出数据类型上分,可以分为增量式编码器和绝对式编码器。 从编码器检测原理上来分,还可以分为光学式、磁式、感应式、电容式。常见的是光电编码器(光学式)和霍尔编码器(磁式)。 2.编码器原理 光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。光电编码器是由光码盘和光电检测装置组成。光码盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,检测装置检测输出若干脉冲信号,为判断转向,一般输出两组存在一定相位差的方波信号。 霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。霍尔编码器是由霍尔码盘和霍尔元件组成。霍尔码盘是在一定直径的圆板上等分地布置有不同的磁极。霍尔码盘与电动机同轴,电动机旋转时,霍尔元件检测输出若干脉冲信号,为判断转向,一般输出两组存在一定相位差的方波信号。
可以看到两种原理的编码器目的都是获取AB相输出的方波信号,其使用方法也是一样,下面是一个简单的示意图。 3.编码器接线说明 具体到我们的编码器电机,我们可以看看电机编码器的实物。 这是一款增量式输出的霍尔编码器。编码器有AB相输出,所以不仅可以测速,还可以辨别转向。根据上图的接线说明可以看到,我们只需给编码器电源5V供电,在电机转动的时候即可通过AB相输出方波信号。编码器自带了上拉电阻,所以无需外部上拉,可以直接连接到单片机IO读取。
光电编码器分类及作用
光电编码器分类及作用 光电编码器是一种通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器,主要由光源、码盘、光学系统及电路4部分组成, 光电编码器主要有增量式编码器、绝对式编码器、混合式绝对值编码器、旋转变压器、正余弦伺服电机编码器等,其中增量式编码器、绝对式编码器、混合式绝对值编码器属于数字量编码器,旋转变压器、正余弦伺服电机编码器属于模拟量编码器. 一、增量式编码器 增量式编码器可以将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,通过计数设备来知道其位置.增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。一般来说,增量式光电编码器输出A、B 两相互差90°电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z 相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志
信号。标志脉冲通常用来指示机械位置或对积累量清零。 二、绝对式编码器 绝对式编码器每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。其位置是由输出代码的读数确定的。当电源断开时,绝对型编码器并不与实际的位置分离。重新上电时,位置读数仍是当前的。绝对编码器能够直接进行数字量大的输出,在码盘上会有若干的码道,码道数就是二进制位数。在每条码道上都会由透光与不透光的扇形区域组成,通过采用光电传感器对信号进行采集。在码盘两侧分别设置有光源和光敏元件,这样光敏元件则能够根据是否接受到光信号进行电平的转换,输出二进制数。并且在不同位置输出不同的数字码。从而可以检测绝对位置。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。优点:可以直接读出角度坐标的绝对值,没有累积误差,电源切除后位置信息不会丢失。编码器的抗干扰特性、数据的可靠性大大提高了。 三、混合式绝对值编码器 混合式绝对值编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。 四、旋转变压器 旋转变压器简称旋变,是一种可变耦合原理工作的交流控制电机。它的副方(次级)输出电压与转子转角呈确定的函数关系。由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的,相比于采用光电
光电效应及其应用论文
光电效应及其应用 摘要:本文介绍了光电效应的概念、实验规律以及一些在近代中的应用,并且简单明了的讲解了一些光电效应的基本原理。 关键词:内光电效应;外光电效应;波粒二象性;光电器件; 引言:光电效应是物理学中一个重要而神奇的现象。在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电。光电现象由德国物理学家赫兹于1887年发现,而正确的解释为爱因斯坦所提出。科学家们在研究光电效应的过程中,物理学者对光子的量子性质有了更加深入的了解,这对波粒二象性概念的提出有重大影响。 1、光电效应的概念 光照射到某些物质上,有电子从物质表面发射出来的现象称之为光电效应(Photoelectric effect)。这一现象最早是1887年赫兹在实验研究麦克斯韦电磁理论时偶然发现的。之后霍尔瓦克斯、J·J·汤姆孙、勒纳德分别对这种现象进行了系统研究,命名为光电效应,并得出一些实验规律。 1905年,爱因斯坦在《关于光的产生和转化的一个启发性观点》一文中,用光量子理论对光电效应进行了全面的解释。1916年,美国科学家密立根通过精密的定量实验证明了爱因斯坦的理论解释,从而也证明了光量子理论,使其逐渐地被人们所接受。 2、内、外光电效应 光电效应分为:内光电效应和外光电效应。光电效应中多数金属中的光电子只能从靠近金属表面内的浅层(小于m )逸出,不能从金属内深层逸出的结论。光波能量进入金属表面后不到1μm的距离就基本被吸收完了。 外光电效应是被光激发产生的电子逸出物质表面,形成真空中的电子的现象。内光电效应是被光激发所产生的载流子(自由电子或空穴)仍在物质内部运动,使物质的电导率发生变化或产生光生伏特的现象。分为光电导效应和光生伏特效应。 外光电效应:当光照射某种物质时,若入射的光子能量足够大,它和物质中的电子相互作用,致使电子逸出物质表面,这就是外光电效应,逸出物质表面的电子叫做光电子。 利用光电子发射材料可以制成各种光电器件。光电倍增管(Photomultiplier Tube)是一种建立在外光电效应、二次电子效应和电子光学理论基础上的,把微弱入射光转换成光电子并获倍增的真空光电发射器件。 内光电效应:现代很多光电探测器都是基于内光电效应,其中光激载流子(电子和空穴)保留在材料内部。最重要的内光电效应是光电导,本征光电导体吸收一个光子,就会从价带激发到导带,产生一个自由电子,同时在价带产生一个
编码器工作原理汇总
编码器的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。 编码器产生电信号后由数控制置CNC、可编程逻辑控制器PLC、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源垂直照射,这样光就把盘子上的图像投射到接收器表面上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,旋转编码器也能得到一个速度信号,这个信号要反馈给变频器,从而调节变频器的输出数据。故障现象:1、旋转编码器坏(无输出)时,变频器不能正常工作,变得运行速度很慢,而且一会儿变频器保护,显示“PG断开”...联合动作才能起作用。要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用电子电路来处理。编码器pg接线与参数矢量变频器与编码器pg之间的连接方式,必须与编码器pg的型号相对应。一般而言,编码器pg型号分差动输出、集电极开路输出和推挽输出三种,其信号的传递方式必须考虑到变频器pg卡的接口,因此选择合适的pg卡型号或者设置合理. 编码器一般分为增量型与绝对型,它们存着最大的区别:在增量编码器的情况下,位置是从零位标记开始计算的脉冲数量确定的,而绝对型编码器的位置是由输出代码的读数确定的。在一圈里,每个位置的输出代码的读数是唯一的;因此,当电源断开时,绝对型编码器并不与实际的位置分离。如果电源再次接通,那么位置读数仍是当前的,有效的;不像增量编码器那样,必须去寻找零位标记。 现在编码器的厂家生产的系列都很全,一般都是专用的,如电梯专用型编码器、机床专用编码器、伺服电机专用型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。 编码器是把角位移或直线位移转换成电信号的一种装置。前者成为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是“1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”。 按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。 旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。 绝对编码器由机械位置决定的每个位置的唯一性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。 由于绝对编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。绝对型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输出信号必须确保连接很好,对于较复杂工况还要隔离,连接电缆芯数多,由此带来诸多不便和降低可靠性,
光电探测器原理
光电探测器原理
光电探测器原理及应用 光电探测器种类繁多,原则上讲,只要受到光照后其物理性质发生变化的任何材料都可以用来制作光电探测器。现在广泛使用的光电探测器是利用光电效应工作的,是变光信号为电信号的元件。 光电效应分两类,内光电效应和外光电效应。他们的区别在于,内光电效应的入射光子并不直接将光电子从光电材料 内部轰击出来,而只是将光电材料内部的光 电子从低能态激发到高能态。于是在低能态 留下一个空位——空穴,而高能态产生一个 自由移动的电子,如图二所示。 硅光电探测器是利用内光电效应的。 由入射光子所激发产生的电子空穴对,称为光生电子空穴对,光生电子空穴对虽然仍在材料内部,但它改变了半导体光电材料的导电性能,如果设法检测出这种性能的改变,就可以探测出光信号的变化。 无论外光电效应或是内光电效应,它们的产生并不取决于入射光强,而取决于入射光波的波长λ或频率ν,这是因为光子能量E只和ν有关: E=hν(1) 式中h为普朗克常数,要产生光电效应,每个光子的能量必须足够大,光波波长越短,频率越高,每个光子所具有的能量hν也就越大。光强只反映了光子数量的多少,并不反映每个光子的能量大小。 目前普遍使用的光电探测器有耗尽层光电二极管和雪崩光电二极管,是由半导体材料制作的。 半导体光电探测器是很好的固体元件,主要有光导型,热电型和P—N结型。但在许多应用中,特别是在近几年发展的光纤系统中,光导型探测器处理弱信号时噪声性能很差;热电型探测器不能获得很高的灵敏度。而硅光电探测器在从可见光到近红外光区能有效地满足上述条件,是该波长区理想的光接收器件。 一、耗尽层光电二极管 在半导体中,电子并不处于单个的分裂 能级中,而是处于能带中,一个能带有许多
编码器测速
飞思卡尔智能车舵机和测速的控制设计与实现 时间:2010-04-1411:53:10来源:电子设计工程作者:雷贞勇谢光骥五邑大学 2.1舵机工作原理 舵机在6V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6V。图2为舵机供电电路。 舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。从而达到舵机精确控制转向角度的目的。舵机工作原理框图如图3所示。 2.2舵机的安装与调节 舵机的控制脉宽与转角在-45°~+45°范围内线性变化。对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
绝对式光电编码器基本构造及特点
绝对式光电编码器基本构造及特点 用增量式光电编码器有可能由于外界的干扰产生计数错误,并且在停电或故障停车后无 法找到事故前执行部件的正确位置。采用绝对式光电编码器可以避免上述缺点。绝对式光电编码器的基本原理及组成部件与增量式光电编码器基本相同,也是由光源、码盘、检测光栅、光电检测器件和转换电路组成。与增量式光电编码器不同的是,绝对式光电编码器用不同的数码来分别指示每个不同的增量位置,它是一种直接输出数字量的传感器。在它的圆形码盘上沿径向有若干同心码道,每条上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N 位 二进制分辨率的编码器,其码盘必须有N 条码道。绝对式光电编码器原理如图1-8 所示。 绝对式光电编码器是利用自然二进制、循环二进制(格雷码)、二-十进制等方式进行光 电转换的。绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。 图1-8 绝对式光电编码器原理 1.3.2 码制与码盘 绝对式光电编码器的码盘按照其所用的码制可以分为:二进制码、循环码(格雷码)、 十进制码、六十进制码(度、分、秒进制)码盘等。四位二元码盘(二进制、格雷码)如图1-9 所示。图中黑、白色分别表示透光、不透光区域。
光电效应的发现和研究
赫兹发现新奇效应 ——光电效应的发现和研究 光是微粒还是波,这是一个从牛顿时代就有争议的问题。光的直进性、反射和折射可以用微粒说解释;光的干涉、衍射等现象以及光速与媒质的关系却令人信服地表明光的波动性。到了20世纪初,对光的研究深入到光的发生、光与物质相互作用等领域,光电效应的发现和研究,使人们对光的本性又有了新的认识:光既是波,又是微粒,也就是说,光具有波粒二象性。 光电效应是指在光的作用下从物体表面释放电子的现象,确切地 说,这个现象应该叫做光电发射效应。1887年,赫兹在进行电磁波实验时,注意到电极之间的放电,会受光辐射的影响。这种影响他事前毫无考虑。当时,他用的是两套放电电极,一套产生电振荡,发出电磁波,
如图40-l中的A;另一套当做接收电极,如图1中的B,接收电极的放电间隙可随意调节,它的最大放电间隙即可表示信号的强度。为了便于观察放电火花,赫兹用暗箱把接收电极的回路蒙起来。有一次赫兹发觉接收回路蒙住后,最大火花长度明显变小了。他没有放过这一偶然现象,潜心地研究起来,想找到出现这一现象的原因。于是他陆续挪开暗箱的各个部分,直到证明这个效应是由于箱体有一部分挡住了原回路和次回路之间的通道。然后,他用各种材料挡在通道上试验,发现导体和非导体作用相同,证明不是由于静电或电图1 赫兹的光电效应实验 磁的屏蔽作用。 接着,他用各种透明和不透明的材料进行试验,发现能透光的玻璃仍然起隔离作用,看来光的因素应该排除;岩盐、冰糖、明矾放在通道中,有程度不同的隔离作用,基本上是透明的,最好的是水晶和透明石膏,几乎完全不影响放电。几厘米厚的水晶都不起隔离作用。可见,是紫外光在起作用。他再用紫外光照射负电极。效果最为显著,说明负电极更易于放电。赫兹是一位工作非常谨慎的物理学家,他不轻率对现象作解释,只是如实在论文《紫外光对放电的影响》中作了记载,这篇论文在1887年发表于《物理学年报》上。赫兹发现光电效应有一定的偶然性,但并不是唾手可得的成果,而是经过极其细致的观察和分析才得到的。引人深思的是,这个对光的粒子性有重要意义的效应,恰恰是在证实它的对立面——电磁波的实验中发现的。这不正好说明物质世界的波粒二象性吗? 赫兹的论文发表后,立即引起人们注意,因为似乎这个现象可以导致光直接变成电。许多物理学家纷纷投人光电效应的研究之中。
编码器工作原理
编码器工作原理 Prepared on 22 November 2020
的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。 编码器产生电信号后由数控制置CNC、可编程逻辑控制器、等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外垂直照射,这样光就把盘子上的图像投射到接收器表面上,该接收器覆盖着一层,称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,也能得到一个速度信号,这个信号要反馈给器,从而调节的输出数据。故障现象: 1、旋转编码器坏(无输出)时,变频器不能正常工作,变得运行速度很慢,而且一会儿变频器保护,显示“PG断开”...联合动作才能起作用。要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用电路来处理。编码器pg接线与参数与编码器pg之间的连接方式,必须与编码器pg的型号相对应。一般而言,编码器pg型号分差动输出、集电极开路输出和推挽输出三种,其信号的传递方式必须考虑到变频器pg卡的,因此选择合适的pg卡型号或者设置合理. 编码器一般分为增量型与绝对型,它们存着最大的区别:在的情况下,位置是从零位标记开始计算的脉冲数量确定的,而绝对型编码器的位置是由输出代码的读数确定的。在一圈里,每个位置的输出代码的读数是唯一的;因此,当断开时,绝对型编码器并不与实际的位置分离。如果电源再次接通,那么位置读数仍是当前的,有效的;不像增量编码器那样,必须去寻找零位标记。 现在编码器的厂家生产的系列都很全,一般都是专用的,如电梯专用型编码器、机床专用编码器、专用型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。 编码器是把角位移或直线位移转换成电信号的一种装置。前者成为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是“1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”。 按照工作原理编码器可分为增量式和绝对式两类。是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。 旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。 绝对编码器由机械位置决定的每个位置的唯一性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。 由于绝对编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。绝对型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输出信号必须确保连接很好,对于较复杂工况还要隔离,连接芯数多,由此带来诸多不便和降低可靠性,因此,绝对编码器在多位数输出型,一般均选用串行输出或型输出,德国生产的绝对型编码器串行输出最常用的是SSI (同步串行输出)。
飞思卡尔光电编码器测速程序
#include
光电编码器详解
光电编码器 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。绝对脉冲编码 器:APC 增量脉冲编码器:SPC 1.光电编码器原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90°的脉冲信号。 1.1 增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。 增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。一般来说,增量式光电编码器输出A、B两相互差 90度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位置或对积累量清零。 增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差电度角。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。 增量式光电编码器的优点是:原理构造简单、易于实现;机械平均寿命长,可达到几万小时以上;分辨率高;抗干
光电子技术(论文)
本文由gdl_herb贡献 doc文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。 光电子技术及产业发展 摘要: 光电子器件和部件广泛应用于长距离大容量光纤通信,光存储,光显示,光互联, 光信息处理,激光加工,激光医疗和军事武器装备,预期还会在未来的光计算中发挥重要作用.本文将介绍国内外光电子技术及光电子产业的发展. 关键词:世界光电子技术和产业的发展 ;我国的光电子技术和产业引文: 如果说微电子技术推动了以计算机,因特网,光纤通信等为代表的信息技术的高速发展,改变了人们的生活方式,使得知识经济初见端倪,那么随着信息技术的发展,大容量光纤通信网络的建设,光电子技术将起到越来越重要的作用.美国商务部指出: "90 年代, 全世界的光子产业以比微电子产业高得多的速度发展, 谁在光电子产业方面取得主动权, 谁就将在 21 世纪的尖端科技较量中夺魁" .日本《呼声》月刊也有类似的评论: "21 世纪具有代表意义的主导产业,第一是光电子产业,第二是信息通信产业,第三是健康和福利产业……" ,可以断言,光电子技术将继微电子技术之后再次推动人类科学技术的革命. 1 世界光电子技术和产业的发展光纤通信技术的发展速度远远超过当初人们的预料, 光纤已经成为通信网的重要传输媒介,现在世界上大约有 60%的通信业务经光纤传输,到 20 世纪末将达到 85%,但从目前光纤通信的整体水平来看, 仍处于初级阶段, 光纤通信的巨大潜力还没有完全开发出来. 目前, 各种新技术层出不穷,密集波分复用技术(DWDM,在同一根光纤内传输多路不同波长的光信号,以提高单根光纤的传输能力) ,掺铒光纤放大器技术(EDFA,可将光信号直接放大, 具有输出功率高,噪声小,增益带宽等优点)已取得突破性进展并得到广泛的应用.现在 DWDM 系统和光传输设备中,光电技术的比例将从过去比重不到 10%达到 90%.一种全新的,无需进行任何光电变换的光波通信——"全光通信" ,由于波分复用技术和掺铒光纤放大器技术的进展,也日趋成熟,将在横跨太平洋和大西洋的通信系统上首次使用,给全球的通信业带来蓬勃生机. 为此提供支撑的就是半导体光电子器件和部件. 光电子器件和技术已形成一个快速增长的,巨大的光电子产业,对国民经济的发展起着越来越大的作用.美国光电子产业振兴协会估计,到 2003 年,光电子产业的总产值将达 2000 亿美元. Internet 应用的飞速增长对电信骨干网带宽提出越来越高的需求,为满足需求的增长, 人们可以铺设更多的光纤,或靠提高单路光的信息运载量(现在主干网可以分别工作在 2.5Gbps 和 10Gbps, 并已有 40Gbps 的演示性设备) 但更主要的方法却是靠发展波分复用技 . 术,增加光纤内通光的路数(光波分复用的实验记录已经达到 2.64Tbps) .波分复用技术的普遍运用为光电子器件和部件提供了广阔的,快速增长的市场.无限战略公司的报告指出: "信号传输用 1.31μm 和 1.55μm 激光器市场 1999 年达到 13 亿美元,比去年增加 23%; 1.48μm 信号放大用激光器 1999 年市场份额达到 1.6 亿美元,比去年增加33%;980nm 信号放大用激光器销售额达 2.9 亿美元, 比去年增长 121%. 整个激光器市场的份额 1999 年达 18 亿美元, 预期 2003 年将达到 30 亿美元" 美国通信工业研究公司 . (CIR) 的研究预测, 北美市场光电子部件的市场规模将由目前的 28 亿美元增长到2003 年的 61 亿美元,约每年增长 18.5%. 密集波分复用设备销售额也将从 1998 年的 22 亿美元增加到 2004 年的 94 亿美元.报告称虽然 10 年内全光通信还不会全面商业化,但是全光交换将在几年内成为市场主 流,报告也指出尽管光学部件市场被大公司所占据,但仍有创新性公司进入的可能. 2 我国的光电子技术和产业近 10 年来我国光电子技术研究在国家 "863" 计划和有关部门的支持下有了突飞猛进的进展,在很多领域同国外先进国家只有两三年的距离,个别领域还处于世界领先地位. 国内光电子有关产业基地在光电子器件,部件和子系统(如激光器,探测器,光收发模块,EDFA,无源光器件)等已经占领了国内较大的市场份额,初步具备同国外大公司竞争的能力,在毫无市场保护的情况下,靠自己的力量争得了一席之地,市场营销逐年有较大
光电探测器原理
光电探测器原理及应用 光电探测器种类繁多,原则上讲,只要受到光照后其物理性质发生变化的任何材料都可以用来制作光电探测器。现在广泛使用的光电探测器是利用光电效应工作的,是变光信号为电信号的元件。 光电效应分两类,内光电效应和外光电效应。他们的区别在于,内光电效应 的入射光子并不直接将光电子从光电材料内 部轰击出来,而只是将光电材料内部的光电 子从低能态激发到高能态。于是在低能态留 下一个空位——空穴,而高能态产生一个自 由移动的电子,如图二所示。 硅光电探测器是利用内光电效应的。 由入射光子所激发产生的电子空穴对,称为光生电子空穴对,光生电子空穴对虽然仍在材料内部,但它改变了半导体光电材料的导电性能,如果设法检测出这种性能的改变,就可以探测出光信号的变化。 无论外光电效应或是内光电效应,它们的产生并不取决于入射光强,而取决于入射光波的波长λ或频率ν,这是因为光子能量E只和ν有关: E=hν(1) 式中h为普朗克常数,要产生光电效应,每个光子的能量必须足够大,光波波长越短,频率越高,每个光子所具有的能量hν也就越大。光强只反映了光子数量的多少,并不反映每个光子的能量大小。 目前普遍使用的光电探测器有耗尽层光电二极管和雪崩光电二极管,是由半导体材料制作的。 半导体光电探测器是很好的固体元件,主要有光导型,热电型和P—N结型。但在许多应用中,特别是在近几年发展的光纤系统中,光导型探测器处理弱信号时噪声性能很差;热电型探测器不能获得很高的灵敏度。而硅光电探测器在从可见光到近红外光区能有效地满足上述条件,是该波长区理想的光接收器件。一、耗尽层光电二极管 在半导体中,电子并不处于单个的分裂 能级中,而是处于能带中,一个能带有许多
51单片机PID调增量式光电编码器测速.
编码器输出的A向脉冲接到单片机的外部中断INT0,B向脉冲接到I/O端口P1.0。当系统工作时,首先要把INT0设置成下降沿触发,并开相应中断。当有有效脉冲触发中断时,进行中断处理程序,判别B脉冲是高电平还是低电平,若是高电平则编码器正转,加1计数;若是低电平则编码器反转,减1计数。 基于51单片机的直流电机PID闭环调速系统原理详解与程序 (2013-08-04 01:18:15) 转载▼ 标签: 分类:单片机 51单片 机 直流电 机 pid pcf8591 基于51单片机的直流电机PID闭环调速系统 1.电机转速反馈: 原理:利用光电编码器作为转速的反馈元件,设电机转一周光电编码器发送N个PWM波形,利用测周法测量电机转速。 具体实现:将定时器0设置在计数模式,用来统计一定的时间T内接受到的脉冲个数M个,而定时器0置在计时模式,用来计时T时间。则如果T时间接受到M个PWM波形,而电机转一圈发出N个PWM波形,则根据测周法原理,电机的实际的转速为:real_speed=M/(N*T),单位转/秒。若将定时器1置在计数模式,则PWM波形应该由P3^3脚输入。 代码实现:
//定时器0初始化,用来定时10ms void Init_Timer0(void) { TMOD |= 0x01; //使用模式1,16位定时器,且工作在计时模式 TH0=(65536-10000)/256; //定时10ms TL0=(65536-10000)%6; EA=1; //总中断打开 ET0=1; //定时器中断打开 TR0=1; //定时器开关打开 } // 计数器1初始化,用来统计定时器1计时250ms内PWM波形个数 void Init_Timer1(void) { TMOD |= 0x50; //使用计数模式1,16位计数器模式 TH1=0x00; //给定初值,由0往上计数 TL1=0x00; EA=1; //总中断打开 ET1=1; //定时器中断打开 TR1=1; //定时器开关打开 } //定时器0的中断服务子函数,主要完成脉冲个数的读取,实际转速的计算和PID 控制以及控制结 //果输出等工作 void Timer0_isr(void) interrupt 1 { unsigned char count; TH0=(65536-10000)/256; //重新赋值 10ms TL0=(65536-10000)%6;
绝对式光电编码器
绝对式光电编码器 (一)绝对式光电编码器的结构与原理 绝对式光电编码器的核心部件是编码祝.纳码盘内透叫区及不透明区组成。这些:透明区 反不透明K按定编码构成,编码盘L码道的条数就是数码的位数。阁13 [u(a)所不为—— 个4垃自然::进制编码册的编码盘。钽电容长涂黑部分力个透明R,输:U为“117,则主白部分为透叨 K。输i11为“o”.它毛4条码道,对应诲一条码道有一个光电冗件木接收透过编码双的光线。当 编仍痞;与被测物转抽赵转动时.片采用n位编码盘.则能分辨的角度为: o——36()。/2” 自然二进制码虽然简单.但存在着使用上的问题.这是巾于团束转换点处位置不分叫而引 起的粗大娱差。例如,在出7转换到8的位量时光束要通过编码盘?)111利1000的交界处(或 称汉越区)。山1编悦捻的制造工艺和光敏元件女装的误差.有可能使汝数头的最内圈(而位) 定价值世上的光电几件比其余的超前或落后一点.这构导致可能出现两种极洲的读数值,即 1111和oooo,从而引起读数的粗大误差.这种误差是绝刘不能允许的。
为了避免这种误差.uJ采用格雷码(G,3y code)图案的编码投,表13 3结出丁格 箭码和 自然::进制码的比较。山此表uJ以看出,格雷码具有代码从任何值转换到相邻值时字节各位 数户仅有一位发生状态变化的特点;闹自然二进制码则不同,代码经常有2—3位甚至4位数 值间N史化的情况。希迪电子这样,采用格雷码的方法即使发生前述的错移.由于它在迎位时相邻界面 团案的转换仅仅发小一个最小量化中仿(最小分辨率)的此变,因而不会产生粗大误差。这种 编码力法称作单位距离性码,是常采用的方菇。 绝对式光电编码器刘府每一条码道有——个光电元件,当码道处于不向角度时,经光电转换 的输出就呈现山不同的数码、如田13—10(b)所不。它的优点是没有触点磨损,因而允许转速 高.员外届缝隙宽度LJJ做得更小,所以精度也很高,其缺点是结构复杂、价格高、光源寿命短。 国内已有14他编码器的定型产品。
光电子技术论文
硅光电池——我们日常生活中的太阳 能电池 光电池也称为光伏电池。它既可以作为电源,又可以作为光电检测器件。作为电源使用的光电池,主要是直接把太阳的辐射能转换为电能,称为太阳能电池。 常见的光电池有硅光电池、硒光电池、硫化镉光电池、砷化镓光电池,还有硫化铊电池等。其中硅光电池、因其价格便宜、光电转换效率高、光谱响应宽(很适合红外探测)、寿命长、稳定性好、频率特性好、能奈高能辐射、、等优秀的特点,备受人们关注。所以,在此本人着重介绍硅光电池。 一、硅光电池的分类: 1)单晶体硅光电池 单晶体硅光电池用P型(或n型)硅衬底,通过磷(或硼)扩散形成Pn结而制作成的,生产技术成熟,是光伏市场上的主导产品。单晶硅光电池面积有限,目前比较大的为Φ10至20cm的圆片,年产能力46MW/a。目前主要课题是继续扩大产业规模,开发带状硅光电池技术,提高材料利用率。国际公认最高效率在AM1.5条件下为24%,空间用高质量的效率在AM0条件约为13.5-18%,地面用大量生产的在AM1条件下多在11-18%之间。
2)多晶体硅光电池 p-Si(多晶硅,包括微晶)光电池没有光致衰退效应,材料质量有所下降时也不会导致光电池受影响,是国际上正掀起的前沿性研究热点。在单晶硅衬底上用液相外延制备的p-Si光电池转换效率为15.3%,经减薄衬底,加强陷光等加工,可提高到23.7%,用CVD法制备的转换效率约为12.6-17.3%。采用廉价衬底的p-Si薄膜生长方法有PECVD和热丝法,或对a-Si:H材料膜进行后退火,达到低温固相晶化,可分别制出效率9.8%和9.2%的无退化电池。微晶硅薄膜生长与a-Si 工艺相容,光电性能和稳定性很高,研究受到很大重视,但效率仅为7.7%。大面积低温p-Si膜与-Si组成叠层电池结构,是提高a-S光电池稳定性和转换效率的重要途径,可更充分利用太阳光谱,理论计算表明其效率可在28%以上,将使硅基薄膜光电池性能产生突破性进展。 3)非晶体硅光电池 a-Si(非晶硅)光电池一般采用高频辉光放电方法使硅烷气体分解沉积而成的。由于分解沉积温度低,可在玻璃、不锈钢板、陶瓷板、柔性塑料片上沉积约1μm厚的薄膜,易于大面积化(0.5m×1.0m),成本较低,多采用p in结构。为提高效率和改善稳定性,有时还制成三层p in 等多层叠层式结构,或是插入一些过渡层。其商品化产量连续增长,年产能力45MW/a,10MW生产线已投入生产,全球市场用量每月在1