自动避障寻迹小车软件设计开题报告
西安工业大学北方信息工程学院毕业设计(论文)开题报告
题目:自动避障寻迹小车软件设计
系(部):电子信息系
专业:通信工程
班级:B090310
学生:何欣
学号:B09031036
指导教师:王青岳
2012年12月18日
1.毕业设计(论文)综述(题目背景、研究意义及国内外相关研究情况)
1.1题目背景:
智能小车的巡线和避障功能在生产生活中都有着广泛的用途。例如:可以用在大的生产车间的物流系统中,按照预先设定的路线来传输货物自动躲避障碍功能从而使工作更加安全和效率更高。
1.2研究意义:
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想,智能小车可以作为机器人的典型代表。
电子技术的飞速发展,对自动化要求越来越高,智能汽车检测并完成特殊的任务将成为以后的一个新的发展方向。在危险或不利于人工作业的环境下,利用智能小车替代人工作业完成特殊任务,避免人员伤亡,更可减少经济损失。
1.3国内外相关研究情况:
在世界科学界和工业设计界中,众多的研究机构都在研发智能车辆,其中具有代表性的智能车辆包括:
美国NavLab系列智能车辆系统。该系统是由美国卡内基·梅隆大学机器人研究所研制的。NavLab.V系统的车体采用Pontiac运动跑车。其传感器系统包括视觉传感器系统、差分GPS系统、光纤阻尼陀螺和光码盘。
德国VaMoRs—P智能车辆系统。该系统由德国联邦国防大学和奔驰汽车公司研制的。车体采用奔驰500型轿车。传感器系统包括由4个小型彩色CCD摄像机构成的两组主动式双目视觉系统、3个惯性线性加速度计和角度变化传感器、测速表及发动机状态测量仪等。执行机构包括方向力矩电机、电子油门和液压制动器等。
国内智能车辆研究由于起步晚,以及经济条件的制约,在智能车辆研究领域与发达国家有一定的差距,目前开展这方面研究工作的单位主要包括一些大学和科研机构,具有代表性的系统有:
7B.8智能车辆系统。该系统是由南京理工大学、北京理工大学、浙江大学、国防科技大学、清华大学等多所院校联合研制,属于军用室外智能车辆,于1995年底通过验收。
飞思卡尔杯全国大学生智能汽车竞赛就是在这样的背景下应运而生的。比赛由国家教育部高等学校自动化专业教学指导分委员会主办,飞思卡尔半导体公司协办。由组委会提供统一的车模和单片机,要求各参赛队在不改变车模的底盘结构的前提下,通过选择适当的检测方案和控制算法,使车模能够在专门设计的跑道上自主地识别路线行驶,单圈行驶时间最短的赛车获胜。这样,通过提供一个相同的比
赛平台,各参赛队伍必须仔细研究车模的数学模型和控制方案,从检测和控制的角度来解决这个问题。
2.本课题研究的主要内容和拟采用的研究方案、研究方法或措施 2.1 主要内容:
本题目要求一小车能够自动沿引导线寻迹,能够根据超声波检测自动躲避障碍,并恢复对路线的循迹。该小车采用单片机作为电动车的控制核心,通过寻迹模块采集路线信息,经判断处理后准确地控制小车沿引导线前进。通过避障模块在寻迹过程中利用超声波对距离的检测将前方的障碍探测出来并且通过超声波传回的数据进行判断避障,通过霍尔传感器检测轮子转一圈脉冲变换信息,构成速度采集模块,同时小车能够在1602液晶上自动显示、记录时间、里程以及行驶速度。 2.2研究方案
a. 硬件方案
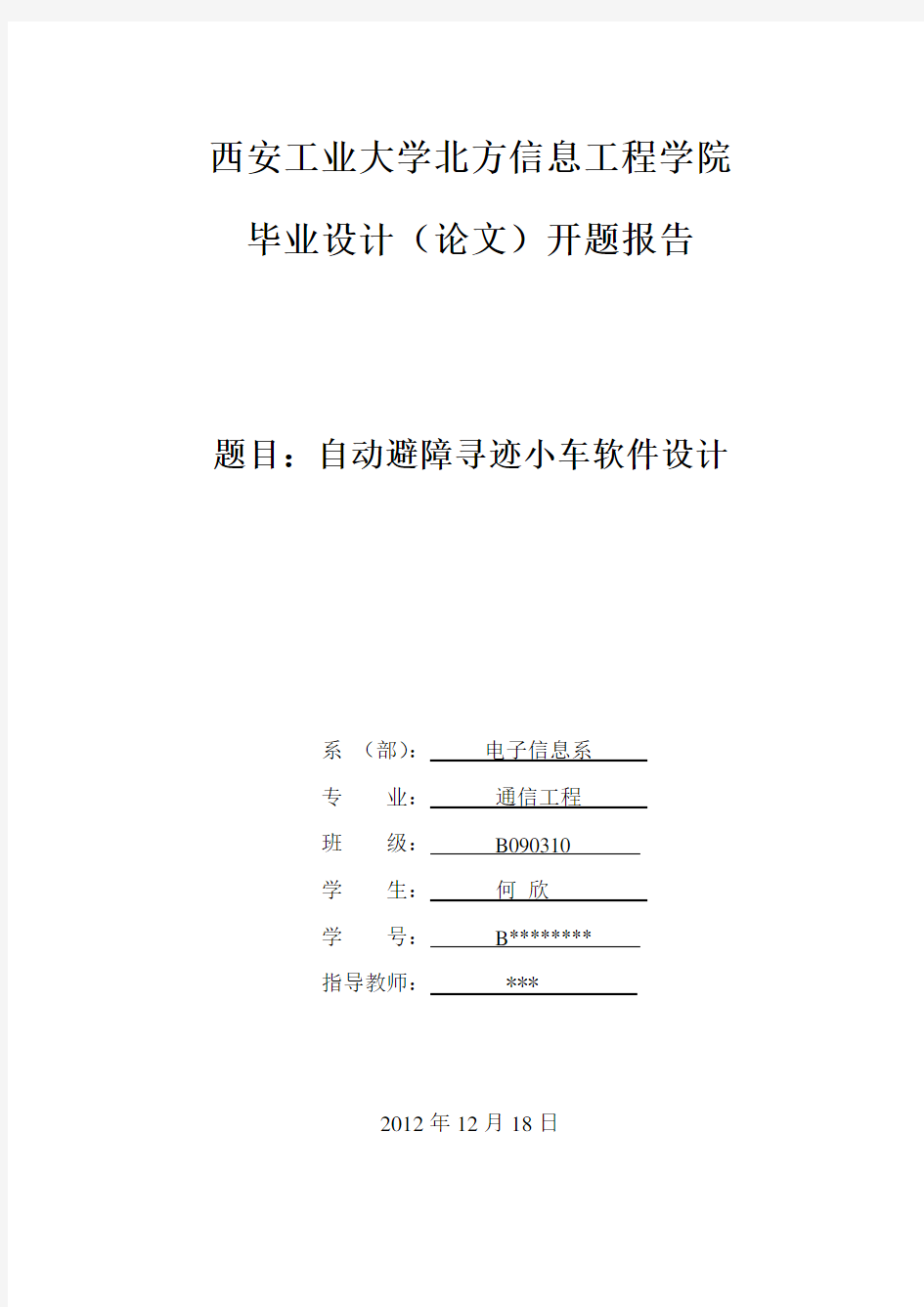
系统框图如图1所示。
图1 系统框图
硬件主要由控制器模块,电源模块,电机驱动模块,寻迹模块和避障模块构成。本次课题主要以软件为主。
b. 软件方案
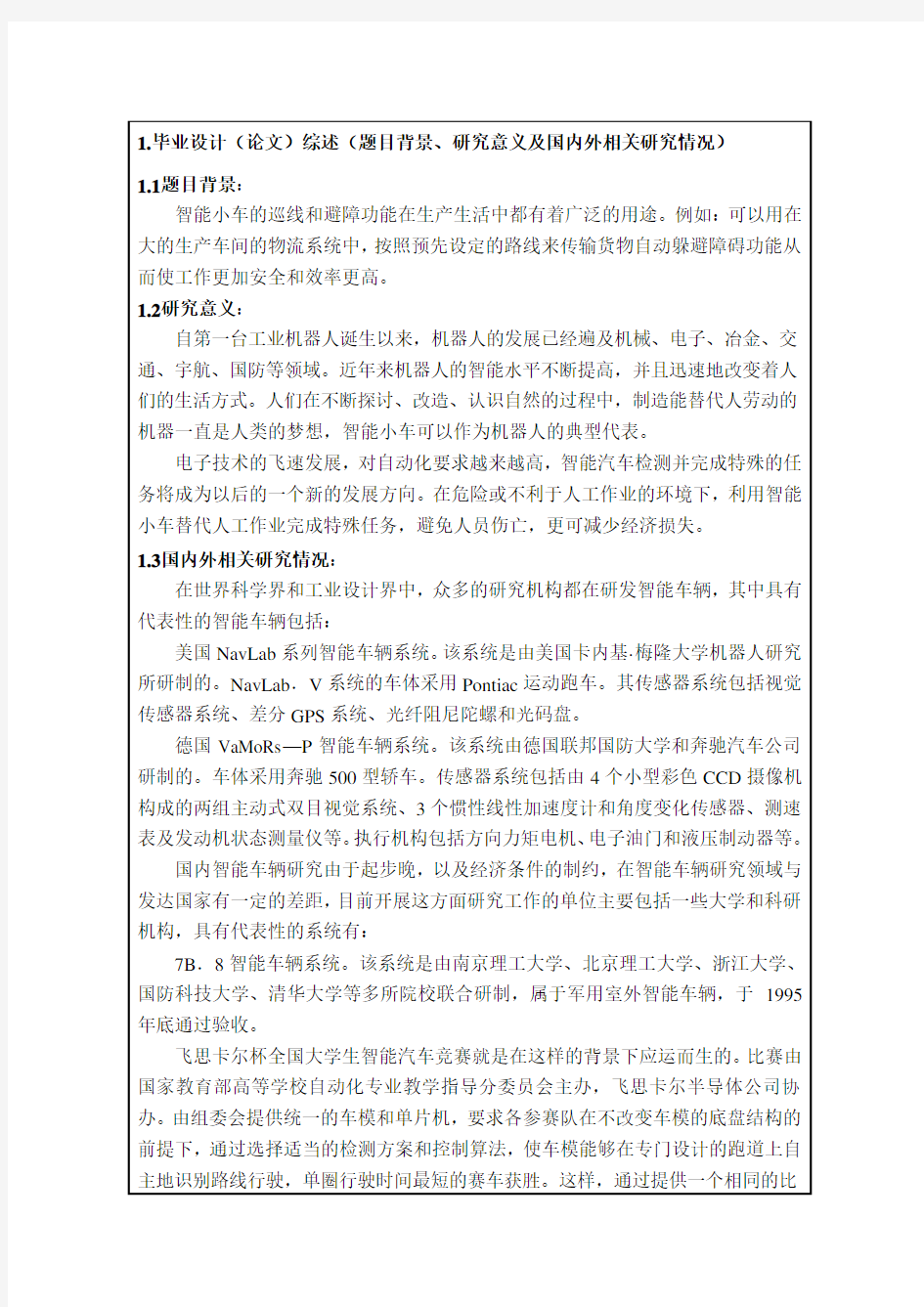
系统软件编程采用成熟的软件开发技术——模块化的编程思想,这样对将来系统软件的移植、维护、更新提供了很大的余地,大大提高系统的可维护性和可升级性。软件设计如图2所示。
AT89S52
路径识别单元
避障检测模块 舵机控制单元
驱动电机控制
车速检测单元
速度里程显示
电池组9V
电池组9V
电源管理单元
信号调理电路
图2 系统软件框图
本课题软件设计由以下几个模块组成:
(1) 单片机的初始化模块包括:I/O 模块、PWM 模块、计时器模块、定时中断模块初始化。
(2) 实时路径检测及避障模块:前排光电传感器检测黑线,将返回信号输入单片机的输入端口,程序不间断地读入输入端口的信号,通过判断语句,得出合适的PWM 信号控制舵机转向。
(3) 超声波测距模块:在智能车寻迹的过程中利用超声波对距离的检测将前方的障碍探测出来并且通过超声波传回的数据进行判断。
(4) 电机驱动控制模块:该模块完成小车方向控制和PWM 波输出。通过改变PWM 波占空比可以实现电机平滑宽范围调速
(5) 速度采集显示模块:通过霍尔传感器检测脉冲变换信息
(6) 通过1602液晶显示接口电路进行软件设计,将小车行驶时间,速度里程显示出来。
3.本课题研究的重点及难点,前期已开展工作
该课题的重点为引导线路、障碍的检测、数据处理以及直流电机的驱动;其难点为选用AT89S52单片机为控制核心使整个系统的避障功能和循迹功能这两模块不能很好整合在一起。
针对课题的研究,前期开展的工作有:
(1) 认真详细的阅读任务书,深刻了解主要的内容和要求。
(2) 查找搜集需要使用的各类传感器控制的有关资料,学习掌握单片机编程、接口技术的具体应用。
主程序设计
初始化程序路径检测及避障
超声波测距
电机驱动模块
速度采集模块
显示功能模块
(3) 查阅与智能小车相关的书籍,了解智能小车的工作原理。
(4) 根据控制要求初步确定所使用的元器件。
4.完成本课题的工作方案及进度计划(按周次填写)
1-3周:开题,搜集资料;
4-5周:进行方案设计和论证工作;
5-10周:完成方案论证,单元电路实验确定最终设计实施方案;
11-16周:完成软硬件电路的安装,通过系统联调;
17-18周:完成毕业设计论文并进行毕业答辩。
5. 指导教师意见(对课题的深度、广度及工作量的意见
指导教师:年月日6. 所在系审查意见:
系主管领导:年月日
参考文献
[1] 谢自美.电子线路设计.试验.测试[M] .华中科技大学出版社,2004.23-42.
[2] 宗光华.机器人的创意设计与实践[M] .北京航空航天大学出版社,2004.10-25.
[3] 肖景和.红外线热释电与超声波遥控电路[M] .人民邮电出版社,2003/P96
[4] 靳桅.单片机原理及应用[M].西南交通大学出版社,2004.
[5] 王毅编著.单片机器件手册[M] .人民邮电出版社,1994.
[6] 何立民.单片机应用系统设计[M] .北京航空航天大学出版社,1995.
[7] 软件Keil uvision2、ISP 说明书,芯片89C51RA2xx说明书.
[8] 丹尼斯.克拉克机.器人设计与控制[M] .科学出版社,2004.56-62.
[9] 杨帮文.新编传感器实用宝典[M] .机械工业出版社,2005.208-245 .
[10] 周坚编.单片机C语言轻松入门[M] .北京航空航天大学出版社,2006.
[11] 李丽霞. 单片机在超声波测距中的应用[M]. 电子技术, 2002 .65-72.
[12] 赵文龙,苑鸿骥,万卫强等.汽车倒车测距仪的设计[J].南昌航空工业学院学
报,2001.148-152.
[13] Oppenhein A V, Schafer R·Discrete-Time Signal Processing [M] .Englewood Cliffs,NJ:
Prentice-Hall, 1987.45.
[14] Proakis J G, Manolakis D G.Introducton to Digital Signal Processing [M] . New York:
Macmillan Publishing Company,1988.234.
[15] Dimla D E.Lister JR P M.Leighton N J Network solutions to the tool conditioin monitoring
problemin metal cutting-A critical review of methods[M]. 1997.9.245-298.
循迹避障小车
循迹避障小车说明 1.功能简介 该循迹避障小车使用红外线收发二极管作为传感器,装在前方的两组红外线收发二极管探测前方是否有障碍物,装在下面的两组红外线收发二极管作为循迹使用。LM339将四个红外线接收二极管的输出信号放大后传送给单片机STC15W201S进行处理,单片机根据这四组信号做出判断,然后控制两个直流电机的运行和停止。4个蓝白可调电阻可以调节4组红外线收发二极管的灵敏度。STC15W201S 是一种C51单片机,它下载程序方便,工作电压范围宽,只需要两节1.5V电池就能工作。非常适合初学者使用。 2.电路图 3.元件清单 机械零部件 4.装配与调试 按电路图和电路板上的标识依次将色环电阻,瓷片电容,发光二极管,集成电路插座,排针,电位器,开关,三极管,电解电容焊接在电路板上,注意IC方向,发光二极管的方向。所有元件焊接完成后检查电路板,以免有虚焊,漏焊,短路的情况。循迹用的两组二极管安装在二极管的下方,距离万向轮顶端5MM左右。直流电机的接线有正反,如果在通电后发现电机转反了,只需要将电机的两根线调换后重新焊接即可。 所有安装工作完成后,将电源开关S1拨到OFF位置,S2拨到循迹位置,放入两节电池,再将S1拨到ON位置。这时需要先调节循迹红外接收二极管的灵敏度。调节方法以D3 D7这一组二极管为例,先将D3 D7对准黑色的轨道线,调节可调电阻R10,使右边的电机处于刚好停止的状态,然后将D3 D7 对准纸张的白色区域,只要一对准白色区域,右边的电机马上就开始运转,这时这一组二极管的灵敏度就调节好了,另外一组红外线收发二极管D4 D9的调节方法相同。把小车放到轨道上,就可以循迹了。把开关S2拨到避障位置,调节前方两组避障二极管的灵敏度,将D6 D10 对准一个物体,调节可调电阻R19,直到刚好有一边的电机停转,然后将D6 D10 对准空旷地方,这时停止的这一边电机恢复运转,这组二极管就调节完毕了。由于采用的是红外线避障,如果障碍物是黑色或者表面为镜面,都会影响红外线的反射,导致检测不到障碍,无法做出避障动作。单片机程序是一个示例,源代码可以在网站下载,十分简单。相信你看过了解之后,可以编写出更好的循迹避障算法。 电路板上的J2排针用来下载程序。单片机的所有引脚都通过排针引出,方便学习和使用。
超声波避障小车开题报告
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 设计题目:超声波避障小车 院系:电气学院自动化测试与控制系 班级: 设计者: 学号: 指导教师:周庆东 设计时间:9.2~9.13 哈尔滨工业大学 哈尔滨工业大学课程设计任务书
*注:此任务书由课程设计指导教师填
开题报告 1立项依据 1.1立项目的 (1)设计一辆利用超声波传感器来实现避障功能的小车,使小车对其运动方向受到的阻碍作出各种躲避障碍的动作。 (2)进一步学习单片机原理及其应用,提高程序的编写能力。 (3)掌握单片机系统外扩器件的连接与使用,了解超声波传感器的工作原理。 (4)掌握软件和硬件调试的基本技巧与方法。 1.2立项意义 在当今社会,汽车成为了越来越普遍,人们不可缺少的交通工具。但汽车的不断增加,随之而来就是越来越多的交通事故。交通事故成为了现在越来越严重的安全隐患。所以随着汽车工业的快速发展,我们必须加强对汽车安全性能的考虑。所以,智能汽车概念应运而生,他既是汽车产业的机遇也是汽车产业的挑战。汽车的智能化必将是未来汽车产业发展的趋势,在这样的背景下,我们开展了基于超声波的智能小车的避障研究。 超声波作为智能车避障的一种重要手段,以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用。 2主要设计内容及方案 2.1总体方案 系统采用51单片机作为核心控制单元用于智能车系统的控制,在超声波检测到障碍物之后,主控芯片根据距离值控制直流电机的转动,在与障碍物距离较大的情况下,快速前进,在与障碍物距离较小但还未到达临界转弯方向值的时候,慢速前进。在与障碍物距离很近需要转向避障时,方案上将尝试进行转向,来进行避障。 2.2设计原理 该智能车系统可分为三个主要模块:单片机主控核心模块,传感器避障模块,电机驱动模块。系统主要原理是:通过超声波避障模块(即感测模块)实时监测路面情况并及时传输给单片机。由单片机主控核心模块根据感测模块给予的信息控制小车两电机转动工作状态。电机驱动模块驱动两电机转动,实现前进或者左、右转。
智能声控循迹避障小车实训
—实训报告—(智能小车组装与调试) 学院系别: 专业班级: 设计学生: 指导老师: 设计时间:
1.1项目概述 本次实训是基于单片机(STC89C52RC)智能小车的设计与开发,开发中涉及控制、程序设计、模式识别、传感技术、电子、计算机、机械等。开发智能小车的学习与发展,对促进学习综合运用所学的嵌入式知识以及电子技术的知识提高,具有良好的推动作用。智能小车能实现自动引导功能和循迹避障功能。最终完成硬件电路设计与制作和控制软件的编写以及调试。 1.2项目要求 (1)理解程序、硬件电路图,查阅相关资料; (2)焊接电路板; (3)软硬件调试; (4)完成循迹,避障,遥控等功能。 1.3实训目的 (1)理解并掌握单片机控制小车的循迹,遥控、避障的原理; (2)了解电子路的布局、PCB板的设计; (3)掌握电路板焊接技术,如何用万用表线判断元器件的好坏; (4)掌握单片机C语言的编程及软硬件调试。 1.4系统设计 1.4.1框图设计 基于STC89C52单片机智能小车系统设计由STC89C52单片机、电机驱动、晶振电路、按键电路、数码管显示电路、红外感应电路几部分组成,系统框图如图1-1所示。
图1-1 基于STC89C52单片机智能小车系统框图 1.4.2知识点 该项目需要了解以下知识点。 (1)+5V电源原理及设计。 (2)单片机复位电路工作原理及设计。 (3)单片机晶振电路工作原理及设计。 (4)案件电路的设计。 (5)数码管的特性及应用。 (6)电路板焊接技术。 (7)STC89C52单片机引脚。 (8)单片机C语言程序设计 (9)红外线感应原理。 1.5硬件设计 1.5.1总体设计 智能小车采用前轮驱动,前轮左右两边各用一个电机驱动,调制前面两个轮子的转速起 停从而达到控制转向的目的,后轮是万象轮起支撑的作用。
智能循迹避障小车方案设计书
封面
作者:PanHongliang 仅供个人学习 目录 摘要………………………………………………………………………………………2 ABSTRACT………………………………………………………………………………
…2 第一章绪论 (3) 1.1智能小车的意义和作用 (3) 1.2智能小车的现状 (3) 第二章方案设计与论证 (4) 2.1 主控系统 (4) 2.2 电机驱动模块 (4) 2.3 循迹模块 (6) 2.4 避障模块 (7) 2.5 机械系统 (7) 2.6电源模块 (8) 第三章硬件设计 (8) 3.1总体设计 (8) 3.2驱动电路 (9) 3.3信号检测模块 (10) 3.4主控电路 (11) 第四章软件设计 (12) 4.1主程序模块 (12) 4.2电机驱动程序 (12) 4.3循迹模
块 (13) 4.4避障模块 (15) 第五章制作安装与调试 (18) 结束语 (18) 致谢……………………………………………………………………………………… 19 参考文献 (19) 智能循迹避障小车 摘要:利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由 L298N驱动电路完成,速度由单片机输出的PWM波控制。 关键词:智能小车;STC89C52单片机; L298N;红外对管 Intelligent tracking and obstacle-avoid car Abstract:Based infrared detection of black lines and theroad obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car。STC89C52 MCU。L298N。Infrared Emitting Diode 第一章绪论 1.1智能小车的意义和作用 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。 随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视
自动避障小车课程设计
单片机系统 课程设计 成绩评定表 设计课题:自动避障小车 学院名称:电气工程学院 专业班级:自动1105 学生姓名: 学号: 指导教师: 设计地点:31-630 设计时间:
单片机系统课程设计 课程设计名称:自动避障小车 专业班级:自动1105 学生姓名: 学号: 指导教师: 课程设计地点:31-630 课程设计时间:
单片机系统课程设计任务书
目录 1概述-------------------------------------------------------------- 4 1.1研究背景----------------------------------------------------- 4 1.2设计思想及基本功能------------------------------------------- 4 2总体方案设计------------------------------------------------------ 4 2.1方案论证----------------------------------------------------- 4 2.2系统框图----------------------------------------------------- 5 2.3总体方案设计------------------------------------------------- 6 3硬件电路设计------------------------------------------------------ 7 3.1电源电路----------------------------------------------------- 7 3.2晶振电路----------------------------------------------------- 8 3.3复位电路----------------------------------------------------- 8 3.4键盘电路----------------------------------------------------- 8 3.5显示电路----------------------------------------------------- 9 3.6超声波测距电路---------------------------------------------- 10 3.7舵机电路---------------------------------------------------- 11 3.8电机驱动电路------------------------------------------------ 11 3.9电机转速测量电路-------------------------------------------- 13 3.10设计PCB和腐蚀电路板--------------------------------------- 14 4系统软件设计----------------------------------------------------- 16 4.1分模块程序设计---------------------------------------------- 18 4.2主程序设计-------------------------------------------------- 20 5系统调试 ------------------------------------------------------- 20 6总结 ----------------------------------------------------------- 22参考文献:------------------------------------------------------- 23附录A硬件电路图------------------------------------------------- 24附录B 源程序 ---------------------------------------------------- 25
毕业设计+智能循迹避障小车设计
单片机系统课程设计轮式移动机器人的设计 学院:通信与电子工程学院 班级:电子131 姓名:初清晨 学号: 2013131013 同组成员:孟庆阳张轩 指导老师:王艳春 日期: 2015年12月24日
组员分工 1、组长:张轩,实物焊接,报告整理,程序设计 2、组员:孟庆阳,实物焊接,仿真测试,报告整理 3、组员:初清晨,实物焊接,报告整理,仿真测试
目录 摘要 (1) 第一章绪论 (2) 1.1智能小车的意义和作用 (2) 1.2智能小车的现状 (3) 第二章方案设计与论证 (3) 2.1 主控系统 (3) 2.2 电机驱动模块 (4) 2.3 循迹模块 (5) 2.4 避障模块 (6) 2.5 机械系统 (7) 2.6电源模块 (7) 第三章硬件设计 (7) 3.1 AT89S52单片机的简介 (8) 3.2总体设计 (11) 3.3驱动电路 (12) 3.4信号检测模块 (13) 3.5主控电路 (14) 第四章软件设计 (15) 4.1主程序框图 (15) 4.2电机驱动程序 (15) 4.3循迹模块 (16) 4.4避障模块 (20) 结束语 (25) 致谢 (26) 附录一循迹加红外避障综合程序 (28) 附录二实物图 (32)
摘要 随着计算机、微电子、信息技术的快速进步,智能化技术的开发速度越来越快,智能度越来越高,应用范围也得到了极大的扩展。智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等用途。智能电动小车就是其中的一个体现。设计者可以通过软件编程实现它的行进、循迹、停止的精确控制以及检测数据的存储、显示,无需人工干预。因此,智能电动小车具有再编程的特性,是机器人的一种。 本设计采用AT89S52单片机加电机驱动电路和红外遥控及循迹模块还有红外接收一体化传感器设计而成,采用模块化的设计方案,运用红外遥控器控制小车的前进、后退、左转、右转、启动和停止。 关键词:智能小车;STC89C52单片机;L9110;红外对管 Intelligent tracking and obstacle-avoid car Abstract:Based infrared detection of black lines and the road obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car; STC89C52 MCU; L298N; Infrared Emitting Diode
红外避障小车课程设计报告报告
下载可编辑 前言 --------------------------------------------------- 随着生产自动化的发展需要,机器人已经越来越广泛地应用到生产自动化上,随着科学技术的发展,机器人的传感器种类也越来越多,其中红外传感器已经成为自动行走和驾驶的重要部件。 红外的典型应用领域为自主式智能导航系统,机器人要实现自动避障功能就必须要感知障碍物,感知障碍物相当给机器人一个视觉功能。智能避障是基于红外传感系统,采用红外传感器实现前方障碍物检测,并判断障碍物远近。 由于时间和水平有限,我们暂选最基本的避障功能作为此次设计的目标。 本设计通过小车这个载体再结合由AT89S51为核心的控制板可以达到其基本功能,再辅加由漫反射式光电开关组成的避障电路、555组成的转速控制电路、电源电路、差分驱动电路就可以完善整个设计。
目录 前言------------------------------------------------------------------------------1目录------------------------------------------------------------------------------2摘要------------------------------------------------------------------------------3功能概述------------------------------------------------------------------------3硬件设计------------------------------------------------------------------------3 避障电路------------------------------------------------------------------------4单片机电路---------------------------------------------------------------------7电机转速控制电路------------------------------------------------------------7电源电路------------------------------------------------------------------------8电机驱动电路---------------------------------------------------------------9主程序设计--------------------------------------------------------------------12小结-----------------------------------------------------------------------------23参考文献-----------------------------------------------------------------------23
寻迹避障小车原理
循迹避障小车原理 一)小车功能实现 利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。 二)电路分析 1.光电传感 循迹光电传感器原理,利用黑白线对红外线不同的反射能力。然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。光电传感器实现循迹的基本电路如下图所示 、 循迹传感器基本电路 电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。 寻迹部分 调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 – 5 厘米比较合适。注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。我们通常采用第二种方法。 编写程序使小车遇白线时,小车跟着白线走。当小车先前前进时,如果向左偏离了白线。那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。回到白线后。两传感器输出信号为高电平。小车前进。如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。如此如此,小车必不偏离白线。若小车的两对光电传感器同时输出的信号为高电平(黑
红外避障小车课程设计报告.docx
随着生产自动化的发展需要,机器人已经越来越广泛地应用到生产自动化上,随着科学技术的发展,机器人的传感器种类也越来越多,其中红外传感器已经成为自动行走和驾驶的重要部件。 红外的典型应用领域为自主式智能导航系统,机器人要实现自动避障功能就必须要感知障碍物,感知障碍物相当给机器人一个视觉功能。智能避障是基于红外传感系统,采用红外传感器实现前方障碍物检测,并判断障碍物远近。 由于时间和水平有限,我们暂选最基本的避障功能作为此次设计的目标。 本设计通过小车这个载体再结合由AT89S51 为核心的控制板可以达到其基本功能,再辅加由漫反射式光电开关组成的避障电路、555 组成的转速控制电路、电源电路、差分驱动电路就可以完善整个设计。
目录 前言------------------------------------------------------ 1目录------------------------------------------------------ 2摘要------------------------------------------------------ 3功能概述-------------------------------------------------- 3硬件设计-------------------------------------------------- 3避障电路-------------------------------------------------- 4单片机电路------------------------------------------------ 7电机转速控制电路------------------------------------------ 7电源电路-------------------------------------------------- 8电机驱动电路----------------------------------------- 9主程序设计------------------------------------------------ 12小结----------------------------------------------------- 23参考文献------------------------------------------------- 23
智能循迹避障小车报告
摘要:本智能识别小车以STC89C52单片机为控制芯片,以直流电机,光电传感器,超声波传感器,电源电路以及其他电路构成。系统由STC89C52通过IO口,通过红外传感器检测黑线,利用单片机输出PWM脉冲控制直流电机的转速和转向,循迹由TCRT5000型光电对管完成。 一、系统设计 1、小车循迹,避障原理 这里的循进是指小车在白色地板上寻黑线行走,通常采取的方法是红外探测法。红外探测法,即利用红外a在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地板时,发生漫反射反射光被装在小车上的按收管按收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光,单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。红外探测器探测距离有限一殷最大不应超过3cm。 而避障则是通过超声波模块不断向前方发射超声波信号,通过接收反射回来的超声波信号,从而实现的避障。当前方有障碍物时,超声波会向单片机串口发送一串数字,这些数字就是当前小车距离障碍物得距离。当串口接收到信号时,会引发串口中断,单片机通过读取距离值,并且对此数值进行分析是不是距离小车很近,是的话就进行转向;否则继续循迹。当小车遇到第一个障碍后,就计数一次,这样当遇到第二个障碍物时,小车就可以以不同的形式躲避障碍物了。 2、选用方案 (1):采用成品的小车地盘,通过改装来完成任务; (2):采用STC89C52单片机作为主控制器; (3):采用7V电源经7805稳压芯片降压后为其他芯片及器件供电。 (4):采用TCRT5000型红外传感器进行循迹; (5):L298N作为直流电机的驱动芯片; (6):通过对L298N使能端输入PWM来控制电机转速和转向; 3、系统机构框图如下所示: 超声波模块 主控制芯片STC89C52 红外传感器 直流电机L298N 稳压电源模块 电压比较器
红外避障小车课程设计报告
前言 --------------------------------------------------- 随着生产自动化的发展需要,机器人已经越来越广泛地应用到生产自动化上,随着科学技术的发展,机器人的传感器种类也越来越多,其中红外传感器已经成为自动行走和驾驶的重要部件。 红外的典型应用领域为自主式智能导航系统,机器人要实现自动避障功能就必须要感知障碍物,感知障碍物相当给机器人一个视觉功能。智能避障是基于红外传感系统,采用红外传感器实现前方障碍物检测,并判断障碍物远近。 由于时间和水平有限,我们暂选最基本的避障功能作为此次设计的目标。 本设计通过小车这个载体再结合由AT89S51为核心的控制板可以达到其基本功能,再辅加由漫反射式光电开关组成的避障电路、555组成的转速控制电路、电源电路、差分驱动电路就可以完善整个设计。
目录 前言------------------------------------------------------------------------------1目录------------------------------------------------------------------------------2摘要------------------------------------------------------------------------------3功能概述------------------------------------------------------------------------3硬件设计------------------------------------------------------------------------3 避障电路------------------------------------------------------------------------4单片机电路---------------------------------------------------------------------7电机转速控制电路------------------------------------------------------------7电源电路------------------------------------------------------------------------8电机驱动电路---------------------------------------------------------------9主程序设计--------------------------------------------------------------------12小结-----------------------------------------------------------------------------23参考文献-----------------------------------------------------------------------23
自动避障寻迹小车软件设计开题报告
西安工业大学北方信息工程学院毕业设计(论文)开题报告 题目:自动避障寻迹小车软件设计 系(部):电子信息系 专业:通信工程 班级:B090310 学生:何欣 学号:B09031036 指导教师:王青岳 2012年12月18日
1.毕业设计(论文)综述(题目背景、研究意义及国内外相关研究情况) 1.1题目背景: 智能小车的巡线和避障功能在生产生活中都有着广泛的用途。例如:可以用在大的生产车间的物流系统中,按照预先设定的路线来传输货物自动躲避障碍功能从而使工作更加安全和效率更高。 1.2研究意义: 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想,智能小车可以作为机器人的典型代表。 电子技术的飞速发展,对自动化要求越来越高,智能汽车检测并完成特殊的任务将成为以后的一个新的发展方向。在危险或不利于人工作业的环境下,利用智能小车替代人工作业完成特殊任务,避免人员伤亡,更可减少经济损失。 1.3国内外相关研究情况: 在世界科学界和工业设计界中,众多的研究机构都在研发智能车辆,其中具有代表性的智能车辆包括: 美国NavLab系列智能车辆系统。该系统是由美国卡内基·梅隆大学机器人研究所研制的。NavLab.V系统的车体采用Pontiac运动跑车。其传感器系统包括视觉传感器系统、差分GPS系统、光纤阻尼陀螺和光码盘。 德国VaMoRs—P智能车辆系统。该系统由德国联邦国防大学和奔驰汽车公司研制的。车体采用奔驰500型轿车。传感器系统包括由4个小型彩色CCD摄像机构成的两组主动式双目视觉系统、3个惯性线性加速度计和角度变化传感器、测速表及发动机状态测量仪等。执行机构包括方向力矩电机、电子油门和液压制动器等。 国内智能车辆研究由于起步晚,以及经济条件的制约,在智能车辆研究领域与发达国家有一定的差距,目前开展这方面研究工作的单位主要包括一些大学和科研机构,具有代表性的系统有: 7B.8智能车辆系统。该系统是由南京理工大学、北京理工大学、浙江大学、国防科技大学、清华大学等多所院校联合研制,属于军用室外智能车辆,于1995年底通过验收。 飞思卡尔杯全国大学生智能汽车竞赛就是在这样的背景下应运而生的。比赛由国家教育部高等学校自动化专业教学指导分委员会主办,飞思卡尔半导体公司协办。由组委会提供统一的车模和单片机,要求各参赛队在不改变车模的底盘结构的前提下,通过选择适当的检测方案和控制算法,使车模能够在专门设计的跑道上自主地识别路线行驶,单圈行驶时间最短的赛车获胜。这样,通过提供一个相同的比
智能循迹避障小车_论文设计
目录 摘要 (2) ABSTRACT (2) 第一章绪论 (3) 1.1智能小车的意义和作用 (3) 1.2智能小车的现状 (3) 第二章方案设计与论证 (4) 2.1 主控系统 (4) 2.2 电机驱动模块 (4) 2.3 循迹模块 (6) 2.4 避障模块 (7) 2.5 机械系统 (7) 2.6电源模块 (8) 第三章硬件设计 (8) 3.1总体设计 (8) 3.2驱动电路 (9) 3.3信号检测模块 (10) 3.4主控电路 (11) 第四章软件设计 (12) 4.1主程序模块 (12) 4.2电机驱动程序 (12) 4.3循迹模块 (13) 4.4避障模块 (15) 第五章制作安装与调试 (18) 结束语 (18) 致谢 (19) 参考文献 (19)
智能循迹避障小车 肖维 物理与电子信息学院电子信息工程专业 2006级9班指导教师:刘汉奎 摘要:利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。 关键词:智能小车;STC89C52单片机; L298N;红外对管 Intelligent tracking and obstacle-avoid car Xiao Wei School of Physics and Electronic Information,Grade 2006 Class 9 ,Instructor:Liu Hankui Abstract:Based infrared detection of black lines and the road obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car; STC89C52 MCU; L298N; Infrared Emitting Diode
自动避障小车课程教学设计
单片机系统课程设计 成绩评定表 设计课题:自动避障小车 学院名称:电气工程学院 专业班级:自动1105 学生姓名: 学号: 指导教师: 设计地点:31-630 设计时间:
单片机系统课程设计 课程设计名称:自动避障小车 专业班级:自动1105 学生姓名: 学号: 指导教师: 课程设计地点:31-630
课程设计时间: 单片机系统课程设计任务书
目录 1概述 ----------------------------------------------------------------------- 4 1.1研究背景------------------------------------------------------------- 4 1.2设计思想及基本功能 ------------------------------------------------- 4 2总体方案设计 -------------------------------------------------------------- 5 2.1方案论证------------------------------------------------------------- 4 2.2系统框图------------------------------------------------------------- 5 2.3总体方案设计 -------------------------------------------------------- 6 3硬件电路设计 -------------------------------------------------------------- 7 3.1电源电路------------------------------------------------------------- 9 3.2晶振电路------------------------------------------------------------ 10 3.3复位电路------------------------------------------------------------ 10 3.4键盘电路------------------------------------------------------------ 10 3.5显示电路------------------------------------------------------------ 10 3.6超声波测距电路----------------------------------------------------- 12 3.7舵机电路------------------------------------------------------------ 13 3.8电机驱动电路 ------------------------------------------------------- 13 3.9电机转速测量电路--------------------------------------------------- 15
红外避障小车实验
红外避障小车实验报告 一、实验简介 在本实验中,我们在“创意之星”模块化学习套件所提供的机械构件基础上,组装出四轮驱动式小车结构。利用机器人的控制器和系统程序,通过多传感器融合技术结合逻辑判断算法对智能小车的运行状态进行实时调控,最终实现自主探路、判断及选择正确的行进路线功能,完成自主躲避障碍物的任务。 二、实验目的 (1)掌握基本构型和传感器的安装方法,并能搭建出能完成一定功能的机器人,利用创意之星组件,进行避障小车的组 装,调试,利用红外传感器进行路障感应,完成避障功能。(2)会用控制器联机调试舵机工作状态,会查询各种传感器的数据。 (3)通过 NorthStar 的流程图功能,实现简单的逻辑控制(4)能通过编程实现智能小车自主躲避障碍物的功能 (5)对避障小车的避障原理有充分的理解,掌握其避障的方法,能够对实验过程中出现的问题进行解决,发现问题, 解决问题。
三、实验器材 计算机( 1 台);标准版控制器( 1 个);红外接近传感器( 2 个);红外测距传感器( 1 个);直流电源( 1 个);充电器( 1 个);数字舵机( 4 个);多功能调试器( 1 个);轮子( 4 个);螺丝刀( 1 个); KD ( 4 个); L3-1 ( 4 个); U3H ( 5 个);I7 ( 1 个);螺丝和垫片(若干) 四、实验原理 利用红外传感器,其优点是对近距离的障碍物反应速度灵敏,不同方位的传感器之间信号不会相互干扰,最终选择红外传感器作为小车的眼睛,进行避障。 由于本次实验小车轮子没有实现转弯功能,所以通过设定左右两组轮子的不同前进速度来实现转弯功能。当向右转时,左侧轮子的速度要比右侧轮子的前进速度快,反之实现左转功能,此设计需小心谨慎,防止出现轮子不同步,无法实现转弯功能。 五、实验内容 ( 1 )搭建智能小车,掌握基本构型的组装方法,主要包括舵机和轮子的连接、传感器的安装以及舵机和传感器的接线 ( 2 )通过编程控制智能小车的前进、后退、变速以及转向( 3 )将控制策略的流程图用真正的程序语言实现,并下载到
智能循迹避障小车设计
摘要 本系统以设计题目的要求为目的,采用80C51单片机为控制核心,利用红外线传感器进行寻线,控制电动小汽车的自动循迹,并再通过光电开关探测障碍,从而控制电机转向,实现进行壁障功能。整个系统的电路结构简单,可靠性能高,实验测试结果满足要求。本文着重叙述了该系统的硬件设计方法、软件设计方法及测试结果分析。小车运行方案,在现有玩具电动车的基础上,加装红外线光电开关模块和红外寻线模块,实现对电动车位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。 关键词:80C51单片机、红外线传感器、光电开关、电动小车
Abstract The system requirements of the design project for the purpose of the 80C51 microcontroller for the control of the core,the use of the hunt and infrared sensors,automatic obstacle acoidance control of electric cars,and the photoelectric switch to the barrier function.The electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyse. Car is running the program, under the existing toy electric car, based on the installation of super sonic sensor and infrared sensors, to achieve the location of electric vehicles,operational status of the real-time measurement, and measurement data sent to the microcontroller for processing, then SCM detected according to a variety of data to achieve intelligent control of electric vehicles. Key words: 80C51 single chip computer, infrared sensors, photoelectric switch, the electric car