导管螺旋桨内流场的PIV测量

第21卷 第2期实验流体力学V ol.21,N o.2 2007年06月Journal of Experiments in F luid Mech anics Jun.,2007
文章编号:167229897(2007)022*******
导管螺旋桨内流场的PIV测量Ξ
张 军1,张志荣1,朱建良1,徐 锋1,陆林章1,代 钦2
(1.中国船舶科学研究中心,江苏无锡 214082;2.上海大学,上海 200072)
摘要:内流场对于导管螺旋桨的设计和性能分析是至关重要的,利用随车式PI V在中国船舶科学研究中心拖
曳水池进行了导管螺旋桨的内流场测量。使用标靶技术建立了物像对应关系,从而修正导管曲率和厚度产生的图
象畸变。使用同步控制器实现螺旋桨相位、CC D摄像和激光器的精确同步控制。试验分别在三个不同进速系数J
=1.2,1.0和0.8下进行。
试验结果很好地反映了螺旋桨梢涡、毂部涡、以及螺旋桨上下表面脱落的旋向相反的尾涡,以及近导管内壁、桨毂壁面涡层等流动特征。试验表明,涡强都随着进速系数的减小而增加。与螺旋桨前流动相比,导管内螺旋桨
后轴向速度沿径向分布的不均匀性明显增强。试验结果表明,对于导管厚度与曲率都空间变化的导管螺旋桨,应
用PI V技术进行内流场测量在技术上是可行的。
关键词:导管螺旋桨;内流场;PI V
中图分类号:U661.3 文献标识码:A
I nvestigation of internal flow field of ducted propeller
using particle image velocimetry
ZHANGJun1,ZHANG Zhi2rong1,ZHU Jian2liang1,X U Feng1,LU Lin2zhang1,DAI Qin2
(1.China Ship Scientific Research Center,Wuxi Jiangsu 214082,China;2.Shanghai University,Shang2
hai 200072,China)
Abstract:Analysis of internal flow field is very im portant to the design and performance prediction of
ducted propeller.The towing PI V is applied to measure the internal flow field of ducted propeller in a towing tank(150m×7.0m×4.5m)of CSSRC.A body2fitted target is used to calibrate the image distortion caused
by the duct.The synchronizer controls laser and CC D to operate at preset angular position of propeller blade.
The test is carried out at three advanced coefficients J=1.2,1.0and0.8respectively.
The test results show clearly the flow characteristics of tip v ortex,hub v ortex,and trailing edge v ortex
(TE V)shedding from the upper and lower surface of propeller blade,and the v ortices layer near boundary of the duct and hub.And it als o reveals the variation trends of velocity field,v orticity distribution with advanced coefficients.The results from this test prove that the PI V technique is suitable to measure the internal flow field of ducted propeller.
K ey w ords:ducted propeller;internal flow field;PI V
Ξ收稿日期:2006206204;修订日期:2006211216
基金项目:水动力学国防科技重点实验室基金项目(514430101ZS210).
作者简介:张 军(1967-),男,江苏如东人,研究员.研究方向:船舶水动力学.
0 引 言
导管螺旋桨由于能显著地增加效率,因此在船舶和飞机等工程领域已经有重要应用。另外,减速导管一般认为可以大大抑止空泡的发生,据报道国外在船舶上已有应用。
内流场的试验测量对于导管螺旋桨推进装置的设计与性能评估至关重要,对于其内流场数值计算的验证也很重要,同时也是一个技术难点。对于导管螺旋桨内流场的测量,现代流场测试技术中无论是热线风速仪HW A,还是激光测速仪LDV,还是粒子图像测速技术PI V,都具有相当的技术难度。
试验表明,PI V技术适合于螺旋桨尾流复杂流动结构的测量研究。C OTROONI等(2000)在意大利舰艇空泡水筒(0.6m×0.6m×2.6m)中对某四叶螺旋桨的尾流场采用PI V技术进行了测量[1]。试验获得了桨叶边界层产生的粘性尾流、桨叶随边泄出的涡街等流动特征。LEE等(2002)[2]在工作段尺寸为1.2m×0.3m×0.2m的小型循环水槽中,对直径为54mm的五叶螺旋桨进行了尾流场测量,在对同一相位下400幅速度矢量图进行平均后,得到相位平均的速度场和湍流统计特性。
而对于导管螺旋桨内流场的PI V测量,则比较复杂,困难主要是由导管曲率和厚度的空间变化引起的。G H ANE M等[3]在直径为36英寸的大型空泡水筒中开展了导管螺旋桨内流场的PI V与LDV试验。由于导管是厚度均匀的透明圆管,且CC D水密后放置在筒体工作段的水中,因此,在该试验无需考虑CC D 成像畸变及其修正问题。该文还利用导管壁上开窗的技术,解决了LDV测量中光的进出问题。
UZ O L等[4]在特制小型循环水槽中开展多级泵的内流场PI V试验。其中,导管支撑与螺旋桨都采用透明材料加工,且其折射率与试验用的流体介质(NaI 液体,比重为1.8)几乎一致。因此,光可以无障碍进出,在这种情况下也不需要考虑导管曲率和厚度的空间变化所带来的成像畸变及其修正问题。
LANG和MORCK等[5]采用立体PI V,测量了跨声速轴流泵螺旋桨与导管支撑之间内流场的三维速度分布,其中,为补偿相机与测量截面之间的由弯曲玻璃窗口引起的光程非线性变形,该文采用了标准校正靶对成像畸变进行修正。
在拖曳水池中利用随车式PI V系统对导管螺旋桨内流场进行PI V测量,介绍了激光片光照明与CC D 摄像、粒子示踪、测量空间标定、螺旋桨相位与系统的同步控制等技术问题,对三个不同进速系数下的导管螺旋桨内流场进行测量与分析,并对同相位下的数百幅连续采集的瞬时速度场进行流动结构、湍流特性的统计分析研究,从而为导管螺旋桨内流场测量探索出一条新途径。
1 试验设置与方法
1.1 测试对象
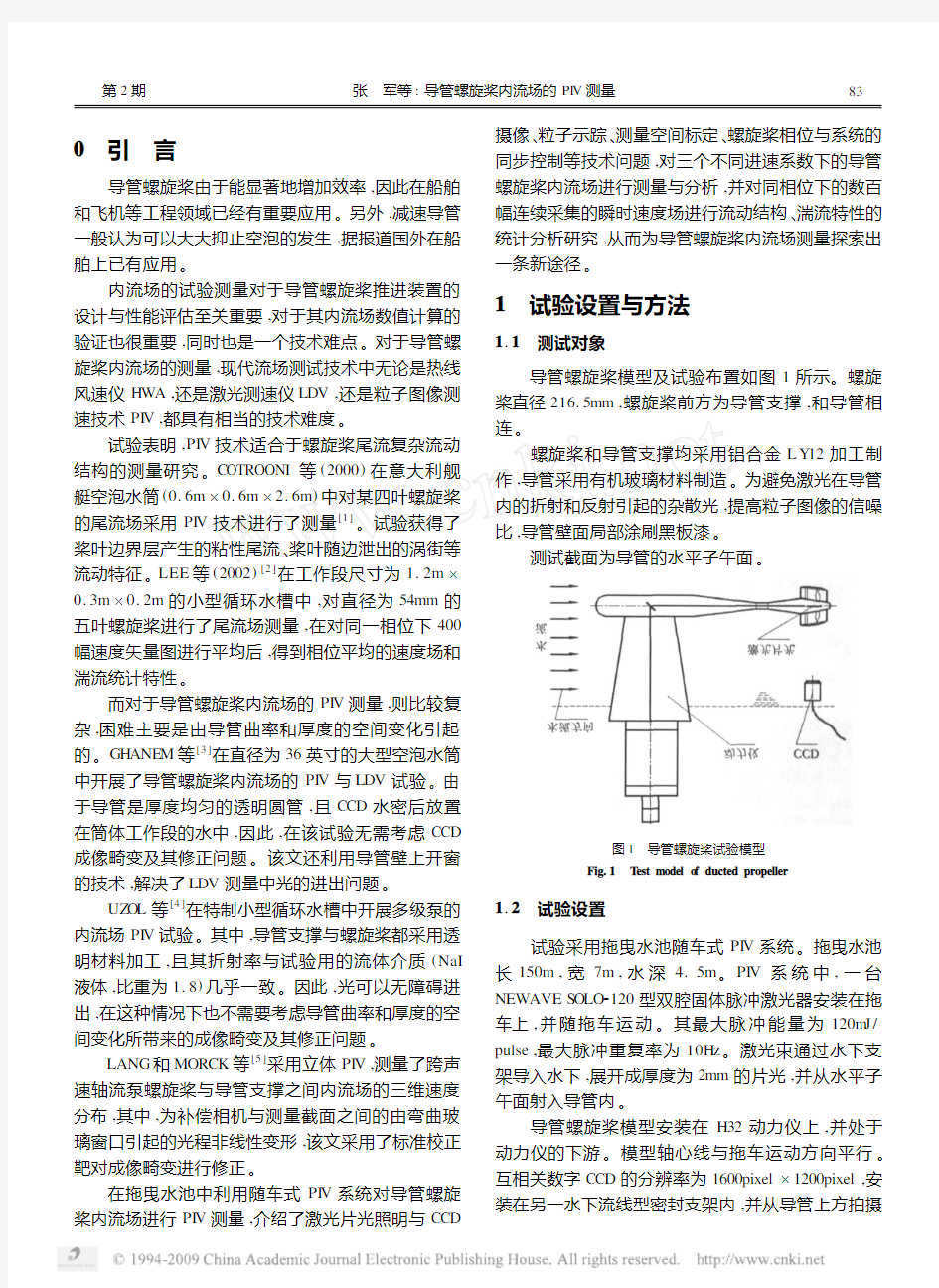
导管螺旋桨模型及试验布置如图1所示。螺旋桨直径216.5mm,螺旋桨前方为导管支撑,和导管相连。
螺旋桨和导管支撑均采用铝合金LY12加工制作,导管采用有机玻璃材料制造。为避免激光在导管内的折射和反射引起的杂散光,提高粒子图像的信噪比,导管壁面局部涂刷黑板漆。
测试截面为导管的水平子午面
。
图1 导管螺旋桨试验模型
Fig.1 T est model of ducted propeller
1.2 试验设置
试验采用拖曳水池随车式PI V系统。拖曳水池长150m,宽7m,水深 4.5m。PI V系统中,一台NEW AVE S O LO2120型双腔固体脉冲激光器安装在拖车上,并随拖车运动。其最大脉冲能量为120m J/ pulse,最大脉冲重复率为10H z。激光束通过水下支架导入水下,展开成厚度为2mm的片光,并从水平子午面射入导管内。
导管螺旋桨模型安装在H32动力仪上,并处于动力仪的下游。模型轴心线与拖车运动方向平行。互相关数字CC D的分辨率为1600pixel×1200pixel,安装在另一水下流线型密封支架内,并从导管上方拍摄
38
第2期 张 军等:导管螺旋桨内流场的PI V测量
测量截面的粒子图像。水下片光支架与CC D支架均随拖车运动。
同步控制器接受动力仪编码器(600脉冲/转)的相位信号,同时输出信号控制两个激光器出光以及互相关CC D相邻两帧的摄像,由此实现螺旋桨相位与相机、激光器之间的精确同步控制。
试验一次性测量区域大小设置为60mm×80mm,拖车运行速度为1.2m/s,试验中两次曝光时间间隔均为0.1ms。螺旋桨转速分别设置为:7.5、6.0和510r/s,所对应的进速系数J分别为0.8,1.0和1.2。进速系数定义如下
J=V0
nD
(1)
其中,V0为拖车速度,n、D分别为螺旋桨转速、螺旋桨直径。
设水平子午面为0°,试验在螺旋桨叶片的相位为20.0°时采样测量,也即测量截面相对于螺旋桨叶片的相位角为20.0°7.5r/s下,在激光器两次曝光之间螺旋桨旋转了0.27°。相对于螺旋桨两相邻叶片之间的夹角51.4°,试验还是具有相当的相位分辨率的。
试验采用直径在80μm左右的PVC微粒作为示踪粒子。限于一次性测量面积,将导管内流场分成导管支撑与螺旋桨之间、及螺旋桨后这两块区域分别进行测量。对每一试验工况,连续采集500对粒子图像。
1.3 物像关系建立
导管的曲率与厚度是空间变化的,这将使粒子图像发生畸变,物像空间对应关系不再是一个常数,而是一个二元函数。为此,笔者专门设计加工一个贴体标靶,在黑底靶面上刻画均匀分布精确定位的白色圆点(间距为5.0mm)。试验前,将标靶放置于测试区域,并拍摄标靶图像。如图2所示,由于导管的存在, CC D所获取的图像存在相当大的变形。
利用透视投影方程(2),对畸变图像进行修正,以获得所测量截面像、物平面之间的转换参数。
X=b1x+b2y+b3
b4x+b5y+1
,Y=
b6x+b7y+b8
b4x+b5y+1
(2)
其中,b1,b2,b3,b4,b5,b6,b7,b8是转换参数。x,y是标靶上各圆点的图像坐标,X,Y是测量截面的大地坐标。获取上述参数后,就建立了所测量截面的物像平面对应关系,具体方法参见文献[6]。完成标定后,开始试验。图4为试验中获得的一对典型粒子图像。
2 试验后处理分析
首先,利用标定所获得的物像平面对应关系,对所获得的粒子图像由于导管曲率与厚度空间变化引起的成像畸变进行修正;然后,对相邻两幅粒子图像采用Hart互相关算法进行诊断分析,获得位移场。对每个截面在同一相位下采样所获得的500对粒子图像,进行诊断获得其速度场。同时,采用空间局域和时域中值滤波方法,来确认有效速度矢量并消除误诊断速度矢量。再对同一相位下的500个速度矢量场进行统计分析。
需要说明的是,在测量螺旋桨后导管内流场时,由于导管尾缘对光的折射作用,导管出口处形成两小块扇形的照明盲区(如图7),因此,在此区域没有测试结果。
在试验结果表达中,坐标系以轴向来流方向为X 轴正向,水平面内螺旋桨径向为Y轴,坐标原点为螺旋桨桨盘面与X轴的交点。图3~11给出了不同进速系数下的速度场、涡量场、流线等试验结果。
3 试验结果分析
试验获得了导管内导管支撑与螺旋桨之间,以及螺旋桨后大量的流动信息,仅给出其中的部分结果。图4为导管支撑与螺旋桨之间的流线图,从中可以看到,随着进速系数J下降,轴向速度增加。在J=1.2时轴向速度分量小于来流速度。这一现象与试验中导管螺旋桨安装在H32动力仪的后方,也即处于动力仪壳体的尾流中速度降低以及J=1.2时螺旋桨转速较低有关。
图5分别为导管内在导管支撑与螺旋桨之间不同轴向位置(X=-50mm、-30mm、-20mm)轴向速度沿径向分布曲线。总体来说,除了桨毂与导管的壁面附近之外,在导管支撑与螺旋桨之间轴向速度沿径向分布还是比较均匀的。对于不同进速系数J,轴向速度沿径向分布所表现出的变化趋势是相当一致的,其数值几乎与转速成线性关系。同样可以看到:在J =1.2和1.0,在螺旋桨与导管支撑之间的大部分区域,其轴向速度分量低于来流速度V0。在J=0.8,由于螺旋桨转速增加,轴向速度分量才大于来流速度。
48实 验 流 体 力 学 (2007)第21卷
图2 螺旋桨与导管支撑之间测量平面的
标靶图像
Fig.2 C alibration target im age for the re 2
gion betw een propeller and strut
图3 一对互相关粒子图像(螺旋桨与导管支撑之间)
Fig.3 A p air of cross 2correlation p article im ages betw een propeller and
strut
图4 减去来流速度后的流线图(导管支撑与螺旋桨之间J =1.2,1.0和0.8)
Fig.4 Stream lines betw een strut and propeller (coming velocity being subtracted)at J =1.2,1.0and 0.
8
图5 轴向速度沿径向分布曲线(轴向位置X =-50mm ,-30mm ,-20mm )
Fig.5 Distribution of axial velocity along radial direction at X =-50mm ,-30mm and -
20mm
图6 涡量分布图(导管支撑与螺旋桨之间,J =1.2,1.0,0.8)
Fig.6 Distribution of vorticity betw een propeller and strut ,J =1.2,1.0and 0.8
5
8 第2期 张 军等:导管螺旋桨内流场的PI V 测量
图7 速度矢量图(螺旋桨后,J =0.8,右图为减去来流速度后)
Fig.7 V elocity vector of propeller at J =0.8,coming velocity being subtracted in right picture
图8 减去来流速度后的流线图(螺旋桨后,J =1.2,1.0,0.8)
Fig.8 Stream lines
dow nstream of propeller at J =1.2,1.0and 0.8(coming velocity being subtracted)
图9 涡量分布图(导管内螺旋桨后,J =1.2,1.0,0.8)
Fig.9 Distribution of vorticity dow nstream of propeller ,J =1.2,1.0and 0.8
6
8实 验 流 体 力 学 (2007)第21卷
图10 螺旋桨后轴向速度沿径向分布曲线(轴向位置X =20mm ,28mm ,40mm )
Fig.10 Distribution of axial velocity along radial direction at X =20mm ,28mm ,
40mm
图11 湍动能分布图(螺旋桨后,J =1.0)
Fig.11 Distribution of turbulence kinetic energy
dow nstream of propeller ,J =1.0
对速度场进行计算可以得到方向垂直于水平子
午面的涡量分量ωz ,即
ωz =5ν5x -5u
5y
(3)
图6为不同进速系数下导管支撑与螺旋桨之间的涡量分布图。显而易见,在螺旋桨与导管支撑之间区域,涡量分布主要集中在导管与桨毂壁面附近,随着进速系数减小,螺旋桨负荷加重,涡量强度增加。 图7为J =0.8下导管内螺旋桨后流场的速度矢量图,其中右图中来流速度已经被减去,从中可以看到螺旋桨梢涡及毂部涡结构。图8为不同进速系数下减去来流速度后的流线图,可以更清晰地看到J =0.8下螺旋桨梢涡及毂部涡。
图9为不同进速系数下螺旋桨后导管内的涡量分布云图。由图可以看到:
(1)导管内螺旋桨后梢涡、毂部涡特征明显,可
以清晰分辨;
(2)螺旋桨后导管内,从桨毂到叶梢出现两条尾涡带。每一条尾涡带包含了涡量方向相反的两部分涡,它们分别从螺旋桨叶片的上下表面边界层泻出。两条尾涡带分别由螺旋桨相邻的两个叶片产生,螺旋桨后方的第二条涡带先于第一条产生,其强度已经衰减。这一现象显示出旋转流动的周期性;
(3)随着进速系数减小,螺旋桨负荷增加,无论是导管壁面、桨毂壁面的涡层,还是梢涡、毂部涡,还是螺旋桨叶片上、下表面边界层脱落下来的尾涡,其涡量强度都随之增大;
(4)同一进速系数下与螺旋桨前相比,螺旋桨后导管壁面及桨毂壁面的涡层范围都扩大,强度增加。这是由于螺旋桨产生的梢涡(毂部涡)方向与导管内壁面(桨毂壁面)涡层的涡量方向一致。 图10为导管内螺旋桨后不同轴向位置处(X =20mm 、28mm 和40mm )轴向速度沿径向分布曲线。可见,不同进速系数下轴向速度沿径向分布的形态非常相似。与导管支撑与螺旋桨之间的流动(图5)相比,螺旋桨后的轴向速度沿径向分布的不均匀程度明显增加,而且除了导管与桨毂附近区域外,螺旋桨后轴向速度明显高于螺旋桨之前。 图11为对同一相位下的500幅速度矢量场进行计算得到的J =1.0时螺旋桨后导管内的湍动能分布图。从中可以看到,螺旋桨后的尾涡带也恰恰是湍动能较大的区域,也即从螺旋桨上下表面边界层脱落下的流体不仅涡量强度大,而且湍流强度大。
4 结 语
在拖曳水池(150m ×7.0m ×4.5m )中利用随车式
PI V 系统,对敞水状态下的导管螺旋桨内流场进行了测量试验,测试区域包括了导管支撑与螺旋桨之间的
7
8 第2期 张 军等:导管螺旋桨内流场的PI V 测量
内流场以及螺旋桨后内流场。
采用贴体标靶对导管厚度与曲率空间变化引起的成像畸变进行了修正,采用同步控制器对螺旋桨相位、激光器及CC D进行控制。还对试验设置及试验后处理分析等作了介绍。试验分别在三个不同进速系数J=1.2,1.0和0.8下进行。
通过对同一螺旋桨相位下500幅瞬时速度场进行相位平均,获得了平均速度场及涡量场。试验结果反映了螺旋桨梢涡、毂部涡、以及螺旋桨上下表面脱落的旋向相反的尾涡,以及近导管内壁、桨毂壁面涡层等流动特征。试验表明,涡强都随着进速系数的减小而增加。与螺旋桨前流动相比,导管内螺旋桨后轴向速度沿径向分布的不均匀性明显增强。
试验结果表明,对于导管厚度与曲率都空间变化的导管螺旋桨,应用PI V技术进行内流场测量在技术上是可行的。
试验研究仅限于螺旋桨的一个相位,下一步还要开展对不同相位下导管螺旋桨内流场的试验研究。此外,为获取周向速度场分布,还要开展导管螺旋桨内流场的3D2PI V技术研究。
参考文献:
[1] C OTROONI A,FE LICE F Di,ROM ANO A P.Investigation of
the near wake of a propeller using particle image velocimetry [J].Experiments in fluids,2000[supplement]:2272236. [2] LEE SJ,PAIKB G and LEE C M.Phase2averaged PT V mea2
surements of propeller wake[A].24th Sym posium on Naval Hydrodynamics,Fukuoka,JAPAN,July2002.
[3] G H ANE M O,STE VE N C,T ip leakage v ortex(T LV)variabili2
ty from a ducted propeller under steady operation and its im pli2 cations on cavitation inception[A].Fifth International Sym po2 sium on Cavitation(C AV2003),Osaka,Japan,N ovember12 4,2003.
[4] UZ O L O,CH OW Y C,K ATZ J.Average passage flow field
and deterministic stress in the tip and hub regions of a multi2 stage turbomachine[A].Proceedings of AS ME Turbo Expo 2003,P ower for Land,Sea,and Air,Atlanta,G eorgia,US A June16219,2003.
[5] LANG H,M ORCK T,W OISETSCH LA GER J.S tereoscopic
particle image velocimetry in a trans onic turbine stage[J].Ex2 periments in Fluids,2002,32:7002709.
[6] CH OI J W,LEE H,KI M B S.Development of32D stereo PI V
and its application to a delta wing[A].The7th Asian Sym po2 sium on Visualization,2003.
88实 验 流 体 力 学 (2007)第21卷
螺旋桨课程设计
螺旋桨图谱课程设计天津大学仁爱学院 姓名:陈旭东 学号:6010207038 专业:船舶与海洋工程 班级:2班 日期:2013.6.30
螺旋桨图谱课程设计 一.已知船体的主要参数 船 型:双机双桨多用途船 总 长: L=150.00m 设计水线长: WL L =144.00m 垂线 间长: PP L =141.00m 型 深: H=11.00m 设计 吃水: T=5.50m 型 宽: B=22.00m 方形 系数: B C =0.84 菱形 系数: P C =0.849 横剖面系数: M C =0.69 排水 量: ?=14000.00t 尾轴距基线距离: P Z =2.00m 二.主机参数 额定功率: MCR=1714h 额定转速: n=775r/min 齿轮箱减速比: i=5 旋向: 右旋 齿轮箱效率: G η=0.97 三.推进因子的确定 伴流分数 ω=0.248 ;推力减额分数 ; t=0.196 相对旋转效率 R η=1.00 ;船身效率 ;H η=11t ω --=1.0691 四.可以达到最大航速的计算 采用MAU 四叶桨图谱进行计算。 取功率储备为10% ,轴系效率S η=0.97 ,螺旋桨转速N=n/i=155r/min 螺旋桨敞水收到马力:D P = 1714 * 0.9 * S η*R η*G η =1714 * 0.9 * 0.97*1.00*0.97 =1451.43 (hp) 根据MAU4-40、MAU4-55、MAU4-70的P B δ-图谱列表计算如下:
项目 单位 数值 假定航速V kn 11 12 13 A V =(1-ω)V kn 8.27 9.02 9.78 0.5 2.5/P D A B NP V = 30.024 24.166 19.742 P B 5.479 4.916 4.443 MAU4-40 δ 65.4 59.732 54.377 P/D 0.692 0.728 0.764 0η 0.613 0.632 0.66 TE P =2D P ×H η×0η hp 1902.4 1961.38 2048.28 MAU4-55 δ 64 58.2 53.535 P/D 0.738 0.778 0.80 0η 0.588 0.614 0.642 TE P =2D P ×H η×0η hp 1824.83 1905.61 1992.41 MAU4-70 δ 63.3 57.4 52.8 P/D 0.751 0.796 0.842 0η 0.565 0.582 0.607 TE P =2D P ×H η×0η hp 1753.45 1806.21 1883.79 根据上表中的计算结果可以绘制TE P 、δ、P/D 及0η对V 的曲线,如图1所示。
施工课程设计计算书讲解
多层砖混结构办公楼施工组织课程设计
目录 任务与指导书 (3) 第一章总则 (12) 第二章工程概况 (13) 第三章施工方案制定 (17) 第四章施工进度计划的编制 (35) 第五章施工准备与资源配置计划 (40) 第六章施工平面图设计 (45) 第七章施工组织措施 (46) 第八章其他管理措施 (49)
多层砖混结构办公楼 施工组织设计任务书及指导书 一、目的 本课程设计为单位工程施工组织设计,是《建筑工程施工组织设计》课程的主要教学环节之一,它是对已学过的建筑施工知识进行综合性的演练运用过程。 通过本课程设计,初步掌握单位工程施工组织设计的内容,设计步骤和方法,巩固所学的理论知识;并运用所学知识,分析和解决施工组织和管理及实施过程中的各种问题。 二、设计条件(即:工程概况) 1.建筑物概况 本工程为某省××公司的办公楼(兼单身职工宿舍),位于××市郊××公路边,总建筑面积为6262m2,平面形式为L型,南北方向长61.77m,东西方向总长为39.44m。该建筑物主体为五层,高18.95m;局部六层,高22.45m,附楼(F~M轴)带地下室,在11轴线处有一道伸缩缝,在F轴线处有一道沉降缝,其总平面、底层平面、立面示意图见附图。 本工程承重结构除门庭部分为现浇钢筋混凝土框架外,皆采用砖混结构,基础埋深 1.9m,在c15素混凝土垫层上砌条形砖基础,基础中设有钢筋混凝土地圈梁;多孔砖墙承重,层层设现浇钢筋混凝土圈梁;内外墙交接处和外墙转角处设抗震构造柱;除厕所、盥洗室采用现浇楼板外,其余楼盖和屋面均采用预制预应力混凝土多孔板,大梁、楼梯及挑檐均为现浇钢筋混凝土构件。 室内地面除门厅、走廊、实验室、厕所、楼梯踏步为水磨石面层外,其它皆采用水泥砂浆地面。室内装修主要采用白灰砂浆外喷乳胶漆涂料;室外装饰以马赛克为主,腰线、窗套为贴面砖。散水为无筋混凝土一次抹光。 屋面保温层为炉渣混凝土。上做两毡三油防水层上铺绿豆砂。上人屋面部分铺设预制混凝土板。 设备安装及水,暖,电工程配合土建施工。 2.地质及环境条件、 根据勘测报告:天然地基承载力为150KN/m2,地下水位在地表下7~8m。本地土壤最大冻结深度为0.5米。 建筑场地南侧为已建成建筑物;北侧和西侧为本公司地界的围墙,东面为XX公路,距道牙3米内的人行道不得占用,沿街树木不得损伤。人行道一侧上方尚有高压输电线及电话线通过(见总平面图)。 3.施工工期 本工程定于三月二十日开工,要求在本年十二月三十日竣工。限定总工期九个月,日历工期为286天。 4.气象条件 施工期间主导风向偏东,雨季为九月份,冬季为十二月到第二年的二月份。 5.施工技术经济条件 施工任务由市建某公司承担,由该公司某项目经理部承包建设,可提供的施工工人有瓦工20人,木工16人以及其它辅助工种工人如钢筋工、机工、电工及普工等,根据施工需要可以调入。装修阶段可从其他工地调入抹灰工,最多调入70人。 施工中需要的水、电均从城市供水供电网中接引。 建筑材料及予制品件均可用汽车运入工地。多孔板由市建总公司予制厂制作(运距7公
螺旋桨设计计算说明书.
某沿海单桨散货船螺旋桨设计计算说明书 姓名: XXX 班级:XXX 学号:XXX 联系方式:XXX 日期:XXX
1.已知船体的主要参数 船长 L = 118.00 米 型宽 B = 9.70 米 设计吃水 T = 7.20 米 排水量 △ = 5558.2 吨 方型系数 C B = 0.658 桨轴中心距基线高度 Zp = 3.00 米 由模型试验提供的船体有效马力曲线数据如下: 航速V (kn ) 13 14 15 16 有效马力PE (hp ) 2160 2420 3005 4045 2.主机参数 型号 6ESDZ58/100 柴油机 额定功率 Ps = 5400 hp 额定转速 N = 165 rpm 转向 右旋 传递效率 ηs=0.98 3.相关推进因子 伴流分数 w = 0.279 推力减额分数 t = 0.223 相对旋转效率 ηR = 1.0 船身效率 0777.111=--=w t H η 4.可以达到最大航速的计算 采用MAU 四叶桨图谱进行计算。 取功率储备10%,轴系效率ηs = 0.98 螺旋桨敞水收到马力: P D = 4762.8 根据MAU4-40、MAU4-55、MAU4-70的Bp --δ图谱列表计算: 项 目 单位 数 值 假定航速V kn 13 14 15 16 V A =(1-w)V kn 9.373 10.094 10.815 11.536 Bp=NP D 0.5/V A 2.5 42.34 35.18 29.60 25.19
Bp 6.51 5.93 5.44 5.02 MAU 4-40 δ75.82 70.11 64.99 60.75 P/D 0.640 0.667 0.694 0.720 ηO0.5576 0.5828 0.6055 0.6260 P TE =P D ·η H ·η O hp 2862.09 2991.44 3107.95 3213.18 MAU 4-55 δ74.35 68.27 63.57 59.33 P/D 0.686 0.713 0.741 0.770 ηO0.5414 0.5672 0.5909 0.6112 P TE =P D ·η H ·η O hp 2778.94 2911.36 3043.28 3137.21 MAU 4-70 δ73.79 67.79 63.07 58.70 P/D 0.693 0.723 0.754 0.786 ηO0.5209 0.5456 0.5643 0.5828 P TE=P D ·η H ·η O hp 2673.71 2800.49 2891.86 2991.44 据上表的计算结果可绘制PT E、δ、P/D及η O 对V的曲线,如下图所示。
螺旋桨的几何形体及制造工艺
第二章 螺旋桨几何形体与制造工艺 螺旋桨是目前应用最为广泛的一种推进器,因而也就成为“船舶推进”课程研究的主要对象。要研究螺旋桨的水动力特性,首先必须对螺旋桨的几何特性有所认识和了解。 § 2-1 螺旋桨的外形和名称 一、螺旋桨各部分名称 螺旋桨俗称车叶,其常见外观如图2-1所示。 螺旋桨通常装于船的尾部(但也有一些特殊船在首尾部都装有螺旋桨,如港口工作船及渡轮等),在船尾部中线处只装一只螺旋桨的船称为单螺旋桨船,左右各一者称为双螺旋桨船,也有三桨、四桨乃至五桨者。 螺旋桨通常由桨叶和桨毂构成(图2-2)。螺旋桨与尾轴联接部分称为桨毂,桨毂是一个截头的锥形体。为了减小水阻力,在桨毂后端加一整流罩,与桨毂形成一光顺流线形体,称为毂帽。 桨叶固定在桨毂上。普通螺旋桨常为三叶或四叶,二叶螺旋桨仅用于机帆船或小艇上,近来有些船舶(如大吨位大功率的油船),为避免振动而采用五叶或五叶以上的螺旋桨。 由船尾后面向前看时所见到的螺旋桨桨叶的一面 称为叶面,另一面称为叶背。桨叶与毂联接处称为叶根, 桨叶的外端称为叶梢。螺旋桨正车旋转时桨叶边缘在前 面者称为导边,另一边称为随边。 螺旋桨旋转时(设无前后运动)叶梢的圆形轨迹称为梢圆。梢圆的直径称为螺旋桨直径,以D 表示。梢圆的面积称为螺旋桨的盘面积,以A 0表示: A 0 =4 π2 D (2-1) 图2-1 ε x 叶面参考线 侧投影轮廓 桨叶 叶根 d 桨毂 O D K 转向 梢圆 螺旋 桨直径O D (b ) Z 导边 叶背 随边叶面叶根 毂帽 叶梢(端) x (a )ε 图2-2
当螺旋桨正车旋转时,由船后向前看去所见到的旋转方向为顺时针者称为右旋桨。反之,则为左旋桨。装于船尾两侧之螺旋桨,在正车旋转时其上部向船的中线方向转动者称为内旋桨。反之,则为外旋桨。 二、螺旋面及螺旋线 桨叶的叶面通常是螺旋面的一部分。为了清楚地了解螺旋桨的几何特征,有必要讨论一下螺旋面的形成及其特点。 设线段ab 与轴线oo 1成固定角度,并使ab 以等角速度绕轴oo 1旋转的同时以等线速度沿oo 1向上移动,则ab 线在空间所描绘的曲面即为等螺距螺旋面,如图2-3所示。线段ab 称为母线,母线绕行一周在轴向前进的距离称为螺距,以P 表示。 根据母线的形状及与轴线间夹角的变化可以得到不同形式的螺旋面。若母线为一直线且垂直于轴线,则所形成的螺旋面为正螺旋面如图2-4(a )所示。若母线为一直线但不垂直于轴线,则形成斜螺旋面,如图2-4(b )所示。当母线为曲线时,则形成扭曲的螺旋面如图2-4(c )及图2-4(d )所示。 母线上任一固定点在运动过程中所形成的轨迹为一螺旋线。任一共轴之圆柱面与螺旋面相交的交线也为螺旋线,图2-5(a )表示半径为R 的圆柱面与螺旋面相交所得的螺旋线BB 1B 2。如将此圆柱面展成平面,则此圆柱面即成一底长为2πR 高为P 的矩形,而螺旋 线变为斜线(矩形的对角线),此斜线称为节线。三角形B' B" B 2 " 称为螺距三角形,节线与底线间之夹角θ称为螺距角,如图2-5(b )所示。由图可知,螺距角可由下式来确定: tg θ = R P π2 (2-2) 三、螺旋桨的几何特性 1. 螺旋桨的面螺距 螺旋桨桨叶的叶面是螺旋面的一部分(图 2-6(a )),故任何与螺旋桨共轴的圆柱面与叶面的交线为螺旋线的一段,如图2-6(b )中的B 0C 0段。若将螺旋线段B 0C 0引长环绕轴线一周,则其两端之轴向距离等于此螺旋线的螺距P 。若螺旋桨的叶面为等螺距螺旋面之一部分,则P 即称为螺旋桨的面螺距。面螺距P 与直径 D 之比P /D 称为螺距比。将圆柱面展成平面后即得螺距三角形如图2-6(c )所示。 设上述圆柱面的半径为r ,则展开后螺距三角形的底边长为2πr ,节线与底线之间的夹角θ为半径r 处的螺距角,并可据下式来确定: (d ) (b ) (c )(a ) 图2-4 2" (b ) (a ) (b )(c ) (a )图2-6
螺旋桨概述
螺旋桨概述 1.概念 1.1结构 图1 螺旋桨示意图 图2 螺旋桨结构 螺旋桨由桨叶、浆毂、、整流帽和尾轴组成,如上图所示。 滑失:如果螺旋桨旋转一周,同时前进的距离等于螺旋桨的螺距P,设螺旋桨转速为n,则理论前进速度为nP。也就是说将不产生水被螺旋桨前后拨动的现象,然而事实上,螺旋桨总是随船一起以低于nP的进速V s对水作前进运动。那么螺旋桨旋转一周在轴向上前进的实际距离为h p(=V s/n),称为进距。于是我们把P与h p之差(P-h p)称为滑失。 滑失与螺距P之比为滑失比: S r=(P-h p)/P=(nP-V s)/nP=1-V s/nP
式中V s/nP称为进距比。 从式中可以得出,当V s=nP时,S r=0。即P=h,也就是螺旋桨将不产生对水前后拨动的现象,螺旋桨给水的推力为零。 因此我们可以得出结论:滑失越大,滑失比越高,则螺旋桨推水的速度也就越高,所得到的推力就越大。 1.2工作原理 船用螺旋桨工作原理可以从两种不同的观点来解释,一种是动量的变化,另一种则是压力的变化。在动量变化的观点上,简单地说,就是螺旋桨通过加速通过的水,造成水动量增加,产生反作用力而推动船舶。由于动量是质量与速度的乘积,因此不同的质量配合上不同的速度变化,可以造成不同程度的动量变化。 另一方面,由压力变化的观点可以更清楚地说明螺旋桨作动的原理。螺旋桨是由一群翼面构建而成,因此它的作动原理与机翼相似。机翼是靠翼面的几何变化与入流的攻角,使流经翼面上下的流体有不同的速度,且由伯努利定律可知速度的不同会造成翼面上下表面压力的不同,因而产生升力。而构成螺旋桨叶片的翼面,它的运动是由螺旋桨的前进与旋转所合成的。若不考虑流体与表面间摩擦力的影响,翼面的升力在前进方向的分量就是螺旋桨的推力,而在旋转方向的分量就是船舶主机须克服的转矩力。 1.3推力和阻力 以一片桨叶的截面为例:当船艇静止时,螺旋桨开始工作,把螺旋桨看成不动,则水流以攻角α流向桨叶,其速度为2πnr(n为转速;r为该截面半径)。根据水翼原理,桨叶要受升力和阻力的作用,推动螺旋桨前进,即推动船艇前进。船艇运动会产生顶流和伴流。继续把船艇看成不动,则顶流以与艇速大小相等,方向相反的流速向螺旋桨流来,而伴流则以与艇速方向相同,流速为u r向螺旋桨流来。通过速度合成,我们可以得到与螺旋桨成攻角α,向桨叶流来的合水流。则桨叶受到合水流升力dL和阻力dD的作用,将升力和阻力分解,则得到平行和垂直艇首尾线的分力:
DWT油污水接收船螺旋桨设计书
1145 DWT油污水接收船螺旋桨设计书 指导老师: 专业班级: 学生姓名: 学号: 邮箱: 完成日期:2013/4/24
目录 1.船型............................. 错误!未定义书签。2.主机参数. (4) 3.推进因子的确定 (4) 4.桨叶数Z的选取 (4) 5.AE/A0的估算 (4) 6.桨型的选取说明 (5) 7.根据估算的AE/A0选取2~3张图谱 (5) 8.列表按所选图谱(考虑功率储备)进行终结设计 (5) 9.空泡校核 (6) 10.计算与绘制螺旋桨无因次敞水性征曲线 (8) 11. 船舶系泊状态螺旋桨计算 (9) 12.桨叶强度校核 (9) 13.桨叶轮廓及各半径切面的型值计算 (10) 14.桨毂设计 (10) 15.螺旋桨总图绘制 (11) 16.螺旋桨重量及转动惯量计算 (11) 17.螺旋桨设计总结 (12) 18.课程设计总结 (12)
1. 船型 单甲板,流线型平衡舵,柴油机驱动,适于油污水接收的中机型单桨船。 1.1艾亚法有效功率估算表:(按《船舶原理(上)》P285实例计算)(可以自主选定一种合适的估算方法,例如泰勒法。)
2.主机参数(设计航速约11kn ) 型号: 6L350PN 标定功率: P S2 = 650kw 标定转速: 362 r/min 3.推进因子的确定 (1)伴流分数w 本船为单桨内河船,故使用巴甫米尔公式估算 =0.165*C B x x=1 =0.1×(Fr-0.2)=0.1*(0.228-0.2)=0.0028 ω=0.185 (2)推力减额分数t 本船为有流线型舵使用商赫公式 t=k =0.111 k=0.6 (3)相对旋转效率: 近似地取为ηR =1.00 (4)船身效率 ηH =w -1t -1=1.091 4.桨叶数Z 的选取 根据一般情况,单桨船多用四叶,加之四叶图谱资料较为详尽、方便查找, 故选用四叶。 5.A E /A 0的估算 按公式A E /A 0 = (1.3+0.3×Z)×T / (p 0-p v )D 2 + k 进行估算, 其中:T =P E /(1-t)V= 346/((1-0.111)*11*0.515)=68.7028kN 水温15℃时汽化压力p v =174 kgf/m 2=174×9.8 N/m 2=1.705 kN/m 2 静压力p 0=p a +γh s =(10330+1000×2.5)×9.8 N/m 2=125.734kN/m 2
厌氧塔计算手册
1. 厌氧塔的设计计算 1.1 反应器结构尺寸设计计算 (1) 反应器的有效容积 设计容积负荷为 5.0 /( 3 / ) N v kgCOD m d 进出水 COD 浓度 C 0 2000( mg / L) , E=0.70 QC 0 E 3000 20 0.70 8400m 3 3 V= 5.0 ,取为 8400 m N v 式中 Q ——设计处理流量 m 3 / d C 0——进出水 CO D 浓度 kgCOD/ 3 m E ——去除率 N V ——容积负荷 (2) 反应器的形状和尺寸。 工程设计反应器 3 座,横截面积为圆形。 1) 反应器有效高为 h 17.0m 则 横截面积: S V 有效 8400 =495(m 2 ) h 17.0 单池面积: S i S 495 165(m 2 ) n 3 2) 单池从布水均匀性和经济性考虑,高、直径比在 1.2 : 1 以下较合适。 设直径 D 15 m ,则高 h D*1.2 15 * 1.2m 18 ,设计中取 h 18m 单池截面积: S i ' 3.14 * ( D )2 h 3.14 7.52 176.6( m 2 ) 2 设计反应器总高 H 18m ,其中超高 1.0 m 单池总容积: V i S i ' H ' 176.6 (18.0 1.0) 3000( m 3 ) 单个反应器实际尺寸: D H φ15m 18m 反应器总池面积: S S i ' n 176.6 3 529.8(m 2 ) 反应器总容积: V V 'i n 3000 3 9000(m 3 )
螺旋桨种类PDF.pdf
种类 船舶推进器种类很多,按照原理不同,有螺旋桨、喷水推进器、特种推进器。 螺旋桨 由桨毂和若干径向地固定于毂上的桨叶所组成的推进器,俗称车叶。螺旋桨安装于船尾水线以下,由主机(见船舶动力装置)获得动力而旋转,将水推向船后,利用水的反作用力推船前进。螺旋桨构造简单、重量轻、效率高,在水线以下而受到保护。 分类 螺旋桨是现代船舶的主要推进工具,现在大多数船舶是用螺旋桨来推进的。螺旋桨又有许多类型。 按照桨叶多少,螺旋桨有2、3或4个桨叶,甚至更多。一般桨叶数目越多吸收功率越大。 按照构造不同,螺旋桨分为定(桨)距和变距螺旋桨两大类。 定距螺旋桨,螺距是固定不变的其特点是构造简单,重量轻,所以才船舶上得到广泛应用。 变距螺旋桨,螺距是可以调节的,通过螺旋桨变距机构,有液压或电力驱动来调节螺距。最初使用的是双距螺旋桨。高速时用高距,低速时用低距,以后又逐步增加了桨距的数目。 应用 普通运输船舶有1~2个螺旋桨。推进功率大的船,可增加螺旋桨数目。大型快速客船有双桨至四桨。螺旋桨一般有3~4片桨叶,直径根据船的马力和吃水而定,以下端不触及水底,上端不超过满载水线为准。螺旋桨转速不宜太高,海洋货船为每分钟100转左右,小型快艇转速高达每分钟400~500转,但效率将受到影响。螺旋桨材料一般用锰青铜或耐腐蚀合金,也可用不锈钢、镍铝青铜或铸铁。 60年代以来,船舶趋于大型化,使用大功率的主机后,螺旋桨激振造成的船尾振动、结构损坏、噪声、剥蚀等问题引起各国的重视。螺旋桨激振的根本原因在于螺旋桨叶负荷加重,在船后不均匀尾流中工作时容易产生局部的不稳定空泡,从而导致螺旋桨作用于船体的压力、振幅和相位都不断变化。 在普通螺旋桨的基础上,为了改善性能,更好地适应各种航行条件和充分利用主机功率,发展了以下几种特种螺旋桨。①可调螺距螺旋桨:简称调距桨,可按需要调节螺距,充分发挥主机功率;提高推进效率,船倒退时可不改变主机旋转方向。螺距是通过机械或液力操纵桨毂中的机构转动各桨叶来调节的。调距桨对于桨叶负荷变化的适应性较好,在拖船和渔船上应用较多。对于一般运输船舶,可使船-机-桨处于良好的匹配状态。但调距桨的毂径比普通螺旋桨的大得多,叶根的截面厚而窄,在正常操作条件下,其效率要比普通螺旋桨低,而且价格昂贵,维修保养复杂。②导管螺旋桨:在普通螺旋桨外缘加装一机翼形截面的圆形导管而成。此导管又称柯氏导管。导管与船体固接的称固定导管,导管被连接在转动的舵杆
螺旋桨设计与绘制汇总
第1章螺旋桨设计与绘制 1.1螺旋桨设计 螺旋桨设计是船舶快速性设计的重要组成分。在船舶型线初步设计完成后,通过有效马力的估算获船模阻力试验,得出该船的有效马力曲线。在此基础上,要求我们设计一个效率最佳的螺旋桨,既能达到预定的航速,又能使消耗的主机马力最小;或者当主机已经选定,要求设计一个在给定主机条件下使船舶能达到最高航速的螺旋桨。螺旋桨的设计问题可分为两类,即初步设计和终结设计。 螺旋桨的初步设计:对于新设计的船舶,根据设计任务书对船速要求设计出最合适的螺旋桨,然后由螺旋桨的转速计效率决定主机的转速及马力。 终结设计:主机马力和转速决定后,求所能达到的航速及螺旋桨的尺度。 在本文中,根据设计航速17.5kn,设计螺旋桨直径6.6m,进行初步设计,获得所需主机的马力和主机转速,然后选定主机;根据选定的主机,计算最佳的螺旋桨要素及所能达到的最大航速等。 1.1.1螺旋桨参数的选定 (1)螺旋桨的数目 选择螺旋桨的数目必须综合考虑推进性能、震动、操纵性能及主机能力等各方面因素。若主机马力相同,则当螺旋桨船的推进效率高于双螺旋浆船,因为单螺旋桨位于船尾中央,且单桨的直径较双桨为大,故效率较高。本文设计船的设计航速约为17.5kn的中速船舶,为获得较高的效率,选用单桨螺旋桨。 (2)螺旋桨叶数的选择 根据过去大量造成资料的统计获得的桨叶数统计资料,取设计船螺旋桨的叶数为4叶。考虑到螺旋桨诱导的表面力是导致强烈尾振的主要原因,在图谱设计中,单桨商船的桨叶数也选为4叶。 (3)桨叶形状和叶切面形状 螺旋桨最常用的叶切面形状有弓形和机翼型两种。弓形切面的压力分布较均匀,不易产生空泡,但在低载时效率较机翼型约低3%~4%。若适当选择机翼型切面的中线形状使其压力分均匀,则无论对空泡或效率均有得益,故商用螺旋桨
船舶螺旋桨的设计
摘要 螺旋桨是造船行业必备的推进部件,它的设计精度将直接影响船的推进速度,它为船的前进提供的推力。 螺旋桨设计是整个船舶设计的一个重要组成部分,它是保证船舶快速性的一个重要方面。一般螺旋桨设计是在初步完成了船舶线型设计,并通过估算或用船模试验的方法确定了船体有效功率之后进行的。影响螺旋桨推进性能的因素很多,在本设计过程中主要对螺旋桨的直径、螺距比、盘面比、桨叶轮廓形状等因素进行研究,并通过在工作中积累的经验,设计一艘内河A级拖船的螺旋桨。 关键词 螺旋桨直径螺距比盘面比桨叶轮廓形状 Abstract Propeller is a necessary promoting components of shipbuilding industry, which be used to providing thrust for ship moving. Its design precision will directly affect the forward speed of the ship. The propeller design the whole ship design is a vital part of the ship, it is to guarantee an important aspect of the swiftness. General propeller design is in preliminary finished ship lines design, and through the estimation or with model test method to determine the hull effective power after. Affect the propeller to advance performance in the many factors in the design process of the propeller diameter, mainly pitch than, than, disk blades factors such as profile, and through the experience in work, design an inland ship class A tug propeller Keywords Propellers diameter pitch of screws ratio pie area ratio paddle outline
厌氧塔设计计算书
1.厌氧塔的设计计算 1.1反应器结构尺寸设计计算 (1) 反应器的有效容积 设计容积负荷为)//(0.53 d m kgCOD N v = 进出水COD 浓度)/(20000L mg C = ,E=0.70 V= 3 084000 .570 .0203000m N E QC v =??= ,取为84003 m 式中Q ——设计处理流量d m /3 C 0——进出水CO D 浓度kgCOD/3 m E ——去除率 N V ——容积负荷 (2) 反应器的形状和尺寸。 工程设计反应器3座,横截面积为圆形。 1) 反应器有效高为m h 0.17=则 横截面积:)(4950 .1784002 m h V S =有效 == 单池面积:)(1653 4952 m n S S i == = 2) 单池从布水均匀性和经济性考虑,高、直径比在1.2:1以下较合适。 设直径m D 15=,则高182.1*152.1*===m D h ,设计中取m h 18= 单池截面积:)(6.1765 .714.3)2 ( *14.32 2 2' m h D S i =?== 设计反应器总高m H 18=,其中超高1.0m 单池总容积:)(3000)0.10.18(6.176'3 ' m H S V i i =-?=?= 单个反应器实际尺寸:m m H D 1815?=?φ 反应器总池面积:)(8.52936.1762 ' m n S S i =?=?= 反应器总容积:)(900033000'3 m n V V i =?=?=
(3) 水力停留时间(HRT )及水力负荷(r V )v N h Q V t HRT 72243000 9000=?== )]./([24.03 6.1762430002 3h m m S Q V r =??= = 根据参考文献,对于颗粒污泥,水力负荷)./(9.01.02 3 h m m V r -=故符合要求。 1.7.2 三相分离器构造设计计算 (1) 沉淀区设计 根据一般设计要求,水流在沉淀室内表面负荷率)./(7.02 3 ' h m m q <沉淀室底部进水口表面负荷一般小于2.0)./(2 3 h m m 。 本工程设计中,与短边平行,沿长边每池布置8个集气罩,构成7个分离单元,则每池设置7个三项分离器。 三项分离器长度:)(16' m b l == 每个单元宽度:)(57.27 187 ' m l b == = 沉淀区的沉淀面积即为反应器的水平面积即2882m 沉淀区表面负荷率:)./(0.20.1)./(39.0288 58.1142 323h m m h m m S Q i -<== (2) 回流缝设计 设上下三角形集气罩斜面水平夹角α为55°,取m h 4.13= )(98.055 tan 4.1tan . 31m h b === α )(04.198.020.32 12m b b b =?-=-= 式中:b —单元三项分离器宽度,m ; 1b —下三角形集气罩底的宽度,m ; 2b —相邻两个下三角形集气罩之间的水平距离(即污泥回流缝之 一),m ; 3h —下三角形集气罩的垂直高度,m ;
深潜器等厚导管螺旋桨敞水性能计算分析_刘可峰
SHIP ENGINEERING 船舶工程Vol.36 No.1 2014 总第36卷,2014年第1期深潜器等厚导管螺旋桨敞水性能计算分析 刘可峰1, 2,姚宝恒1,连琏1 (1.上海交通大学船舶海洋与建筑工程学院海洋工程国家重点实验室,上海 200240;2.江苏科技大学船舶与海洋工程学院,江苏镇江 212003) 摘 要:利用三维设计软件系统SolidWorks对No.37+Ka4-70导管螺旋桨进行了三维实体建模,并对某深潜器使用的No.37导管外形进行了等厚处理。利用计算流体力学软件Fluent对两组导管螺旋桨模型进行了敞水数值模拟,得到了导管螺旋桨的推力,扭矩及其效率,并与图谱数据对比,证明了数值方法的有效性。比较数据分析了No.37导管等厚变化对ROV推进性能的影响,总结了No.37+Ka4-70等厚导管螺旋桨的优缺点。 关键词:深潜器;导管螺旋桨;等厚导管;敞水性能;Fluent 中图分类号:U664.34 文献标志码:A 文章编号:1000-6982 (2014) 01-0037-04 Calculation and Analysis of Open Water Performance for Submersibles Identical Thickness Ducted Propellers LIU Ke-feng1, 2, Y AO Bao-heng1, LIAN Lian1 (1. State Key Laboratory of Ocean Engineering, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China; 2. School of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology, Zhenjiang city 212003, Jiangsu province, China) Abstract: The duct outline of ducted propeller No.37+Ka4-70 was altered for submersibles after building its 3D model with the 3D CAD software system SolidWorks in the article, their open water hydrodynamics feature was simulated and analyzed by using Fluent software. When comparing with the propeller chart, it shows that the numerical method is effective. The thrust force, torque, related coefficient and efficiency were compared. Through calculation and analyses, the advantages and disadvantages of identical thickness ducted propeller No.37+Ka4-70 were summarized. Key words: submersible; ducted propeller; identical thickness duct; open water performance; Fluent 拖网渔船和拖轮等船舶在重载工况作业时,由于其螺旋桨载荷较重,若采用传统螺旋桨,往往效率较低,导管螺旋桨由于其在重载工况下的良好性能而在这类船舶上得到了大量的应用。导管螺旋桨是一种特种推进器,在20世纪30年代就开始了工程应用,它在普通螺旋桨的外围装上了一个套筒,其剖面形状一般为机翼型或是折角型,导管与其中的螺旋桨形成了一个整体工作,这时的流场与没有导管时将发生较大的变化。按照内部流场的变化情况,导管可以分为加速型导管和减速型导管。对于加速型导管,首先可以使螺旋桨盘面处的水流加速,使螺旋桨工作在较大的速度场,从而可以提高螺旋桨的效率。其次,由于导管出口处的面积逐渐扩大,尾流的收缩变小,使轴向诱导速度减小,也有助于提高螺旋桨的效率。最后,由于叶梢和导管的间隙很小,由叶面和叶背的压力差引起的绕流大大减小,其能量损失也就减小。正是由于这些原因,加速导管螺旋桨具有重载效率高,推力大等特点,对于功率系数B p较高的使用场合,采用它能达到较高的效率[1]。深潜器对系泊推力有较高的要求,其推力计算一般就设定在系泊工况下进行,功率系数B p往往很大,故深潜器选用加速导管螺旋桨能获得较好的推进性能。 国外发表的导管螺旋桨系列试验资料中,以荷兰船模试验池的No.19A+Ka和No.37+Ka系列导管螺旋 收稿日期:2013-07-09;修回日期:2013-09-15 基金项目:国家高技术研究发展计划(863计划)资助项目(2008AA092301-1) 作者简介:刘可峰(1978-),男,讲师。主要研究方向为船舶设计,潜器操纵与控制和水动力学应用。 DOI:10.13788/https://www.wendangku.net/doc/7b596175.html,ki.cbgc.2014.0010
国内外螺旋桨主要制造商现状
国内外螺旋桨主要制造商现状目前找到的关于主要国内制造商的消息,大致如下: 一镇江中船瓦锡兰螺旋桨有限公司 是目前世界范围内发展最快的定距桨制造商。对于提高年产量和产品最大规格的生产工具及技术方面的有效投资令公司步入了如今蓬勃发展的局面。 原镇江船舶螺旋桨厂始建于二十世纪七十年代,是当时中国第一家专业螺旋桨制造商。经过三十年的发展,原镇江船舶螺旋桨厂以超过30%的市场占有率稳居国内(市场)同行业第二位。其精湛的生产技术和对本土市场深入了解对合资公司的建立和发展做出了巨大的贡献。 瓦锡兰荷兰推进器联合有限公司以其领先的技术和著名的LIPS?商标闻名于世界船舶行业。她为合资公司带来了其卓越的定距桨设计和生产技术以及LIPS?商标。在提高公司整体水平的同时也为其进一步的技术革新和市场开拓奠定了坚实的基础。 久经考验的LIPS设计软件,用于熔化、保温的高效的工频电炉,以及先进的实验室仅仅是合资公司目前投入使用的先进技术项目中的一部分。对员工的培训,技术上的交流令合资公司在当今的市场上最先进的定距桨项目中更具有竞争力。 二武汉川崎船用机械有限公司(简称WKM) 武汉川崎船用机械有限公司(简称WKM),是由武汉船用机械厂(简称WMMP)和日本国川崎重工业株式会社(简称KHI)共同投资创建的一家合资企业,主要产品是,利用川崎专有知识产权和生产经营模式,制造川崎侧向推进器和川崎全回转螺旋桨。可以预想,船用推进装置,对于江河、海洋等水上运输十分发达的中国国内市场,以及需求量不断增加的世界航运市场,前景非常光明。| 公司成立于1995年11月,正式投产于1998年1月,2005年年产侧推装置200台套。2001年7月得到DNV船级社ISO9002质量体系认证书。 三大连船用推进器有限公司 大连船用推进器有限公司(DMPC)是中国船舶重工股份有限公司的子公司,是中国最大的船用螺旋桨专业化制造公司。公司具有五十多年的船用螺旋桨生产经验,工艺先进,技术力量雄厚,检测手段完备。具备各种船用螺旋桨设计、制造和桨轴研配生产能力。主要产品有:大中小型定距式船用螺旋桨、调距桨部件以及各种铜合金铸件,产品出口几十个国家和地区,现已获得CCS、LR、DNV、ABS、NK、KR、BV、GL、RINA等九个国家船级社的认可,1997年通过GB/T19002—1994质量体系认证,2003年通过GB/T19001—2000质量体系认证。 进入二十一世纪,公司进行了全面技术改造。新建铸造车间、数控加工车间和成品加工车间,引进了七轴五联动九米数控铣床和重型五轴数控落地镗铣床;购置了30吨、7吨双炉体中频感应电炉、10米数控双柱立车等生产设备;联合研制了100吨、30吨大型静平衡仪、Ф11m、Ф8m、Ф6m大型数显螺距规等检测设备;自行研制了冒口切割、内孔加工等大型专用设备。目前,公司一次性总熔化能力达170吨。现已开始批量生产直径11米左右,成品
UASB的设计计算书
两相厌氧工艺的研究进展 摘要:传统的厌氧消化工艺中,产酸菌和产甲烷菌在单相反应器内完成厌氧消化的全过程,由于二菌种的特性有较大的差异,对环境条件的要求不同,无法使二者都处于最佳的生理状态,影响了反应器的效率。1971年Ghosh和Poland提出了两相厌氧生物处理工艺[1],它的本质特征是实现了生物相的分离,即通过调控产酸相和产甲烷相反应器的运行控制参数,使产酸相和产甲烷相成为两个独立的处理单元,各自形成产酸发酵微生物和产甲烷发酵微生物的最佳生态条件,实现完整的厌氧发酵过程,从而大幅度提高废水处理能力和反应器的运行稳定性。 (1) 两相厌氧消化工艺将产酸菌和产甲烷菌分别置于两个反应器内,并为它们提供了最佳的生长和代谢条件,使它们能够发挥各自最大的活性,较单相厌氧消化工艺的处理能力和效率大大提高。Yeoh对两相厌氧消化工艺和单相厌氧消化工艺进行了对比实验研究。结果表明:两相厌氧消化系统的产甲烷率为0.168m3CH4/(KgCOD Cr?d)明显高于单相厌氧消化系统的产甲烷率0.055m3CH4/(KgCOD cr?d)。 (2) 反应器的分工明确,产酸反应器对污水进行预处理,不仅为产甲烷反应器提供 了更适宜的基质,还能够解除或降低水中的有毒物质如硫酸根、重金属离子的毒性,改变难降解有机物的结构,减少对产甲烷菌的毒害作用和影响,增强了系统运行的稳定性。 (3) 产酸相的有机负荷率高,缓冲能力较强,因而冲击负荷造成的酸积累不会对产 酸相有明显的影响,也不会对后续的产甲烷相造成危害,提高了系统的抗冲击能 力。 (4) 产酸菌的世代时间远远短于产甲烷菌,产酸菌的产酸速度高于产甲烷菌降解酸的速率[4,5],产酸反应器的体积总是小于产甲烷反应器的体积。 (5) 两相厌氧工艺适于处理高浓度有机污水、悬浮物浓度很高的污水、含有毒物质及难降解物质的工业废水和污泥。 2两相厌氧工艺的研究现状 2. 1反应器类型 从国内外的两相厌氧系统研究所采用的工艺形式看,主要有两种:第一种是两相均采用同一类型的反应器,如UASB反应器,UBF反应器,ASBR反应器,其中UASB 反应器较常用。第二种是称作Anodek的工艺,其特点是产酸相为接触式反应器 (即完全式反应器后设沉淀池,同时进行污泥回流),产甲烷相则采用其它类型的反应器⑹。 王子波、封克、张键采用两相UASB反应器处理含高浓度硫酸盐黑液,酸化相为8.87L的普通升流式反应器,甲烷相为28.75L的UASB反应器,系统温度 (35 ±)C。当酸化相进水COD 为(6.771 ?11.057)g/ L ,SO42-为(5.648?8.669) g/
无空化导管桨的极限效率分析
第49卷一第4期2017年4月一 哈一尔一滨一工一业一大一学一学一报 JOURNALOFHARBININSTITUTEOFTECHNOLOGY 一 Vol 49No 4Apr.2017 一一一一一一 DOI:10.11918/j.issn.0367?6234.201603075 无空化导管桨的极限效率分析 周军伟,李福正,梅一蕾 (哈尔滨工业大学(威海)船舶与海洋工程学院,山东威海264209) 摘一要:为提高导管螺旋桨的推进效率,改善水下潜器的续航力,采用数值方法对19A/Ka4系列导管螺旋桨在不同长径比二直径比二螺距比和盘面比下的流场进行了模拟.对不同参数下导管螺旋桨的推力二扭矩和效率进行了分析,得出了导管长径比对性能几乎没有影响,但从流场观察来看,长径比增大使梢涡涡核压力提升,增大了空泡数;减小导管内外壁直径比和螺旋桨盘面比,都会使导管桨的效率提高,而推力系数和扭矩系数略有减小.螺距比对导管螺旋桨效率的影响与传统桨类似,随着螺距比的增大,其最高点效率逐渐增大,而后几乎不变.在限定了盘面比和直径比范围的前提下,对该系列导管螺旋桨的极限效率进行了探索.结果表明,该系列导管螺旋桨的最高效率出现在最小盘面比和较小直径比的情况下.关键词:导管螺旋桨;直径比;长径比;螺距比;盘面比中图分类号:U661.31;U664.33 文献标志码:A 文章编号:0367-6234(2017)04-0149-07 Peakefficiencyanalysisofnon?cavitationductedpropeller ZHOUJunwei,LIFuzheng,MEILei (SchoolofNavalArchitectureandOceanEngineering,HarbinInstituteofTechnologyinWeihai,Weihai264209,Shandong,China) Abstract:Toenhancethepropulsiveefficiencyofductedpropellerforbetterenduranceofunderwater?vehicle,19A/Ka4seriesductedpropellerisstudiedthroughnumericalsimulationtoanalyzethefactorsoftheductandbladeonthehydrodynamicperformancebychangethesuchparametersuchaslength?diameterratio,diameterratio,bladearearatioandpitchratiounderdifferentmeshmodels.Itisdiscoveredthatthelength?diameterratiohasalmostnoinfluenceoftheopenwaterperformance,though,thecavitationperformanceisbetterwiththeincreaseoflength?diameterratio.Thelesserductdiameterratioandbladearearatiowillincreasetheefficiency,andaccordingly,thethrustcoefficientandtorquecoefficientwilldecrease.Theinfluenceofthepitchratioonductedpropellerissimilartotheconventionalpropeller,withtheincreaseofpitchratio,thepeakefficiencywillincreaseuntiltoaconstantvalue.Basedonaforementionedresearchinaspecifiedrangeofbladearearatioanddiameterratio,itisfoundthattheminimumbladearearatioandminordiameterratiowillgeneratetheextremeefficiency.Keywords:ductedpropeller;diameterratio;length?diameterratio;pitchratio;bladearearatio收稿日期:2016-03-14 基金项目:国家自然科学基金(51309070);山东省自然科学基金 (ZR2012EEQ004) 作者简介:周军伟(1981 ),男,副教授 通信作者:李福正,jinglelfz@126.com 一一现代信息化的快速发展使水下无人航行器(AUV)扮演着重要的角色.而导管螺旋桨相对传统螺旋桨能够在高负荷时有效地提供额外推力,应用在AUV上具有高效率二大推力二小尺寸二使用灵活二易于控制等优点[1],如美国的 蓝鳍金枪鱼 -21型AUV和中国的 无影 系列AUV上,都采用导管螺旋桨作为推进器.这种航行器一般都是电驱动的[2],如蓝鳍金枪鱼 最高续航力为25h,而执行一次任务(包括下潜二侦测二数据下载二上浮)需要24h, 续航力比较勉强.因而提高导管桨的推进效率对延长续 航时间具有十分重要的作用.考虑到AUV通常工作在较深的水下,且航速较低,一般不发生空化,可能影响导管桨性能的参数有很多,包括导管参 数如直径比和长径比,螺旋桨的参数如盘面比二螺距比等,因此本文从充分发挥导管螺旋桨高效率推进性能的角度出发,通过对比不同导管长径比二直径比二盘面比与螺距比对效率的影响,对导管螺旋桨的极限效率进行了分析. 目前对于导管螺旋桨性能的模拟主要有传统方法和CFD分析两类.传统方法主要有面元法[3]和升力面涡格法[4],Zhang等[5]将导管和桨叶分别采用面元法和涡格法对JD简易导管可调螺距桨进行了数值研究,螺距比对性能的影响稍有提及.随着计算机技术的发展,Kim[6]通过求解RANS方程获得导管桨叶梢处的压力分布以及桨叶和导管边界层二涡核处湍流的发展,证明了RANS方法能够很好地还原流场信息.Krasilnikov等[7]以该方法研究了导管桨的尺度效应,Streckwall等[8]比较了使用9种不同编码求解黏流的CFD软件诸如Fine/Turbo二ISIS二STARCD二OpenFoam等的求解结 万方数据