关于乒乓球弹起高度的实验
关于乒乓球弹起高度的实验
一天,我在做一道数学题——“将乒乓球从高出丢下,乒乓球弹起的高度是前一次的三分之二,如果乒乓球从10米高的地方丢下,第一次能弹多高?第二次能弹多高?第三次能弹多高?......第n次能弹多高?”乒乓球下落后弹起来的高度?这与什么因素有关系呢?乒乓球下落后弹起的高度与落下接触的物体是否有关?
针对这个问题,我作出了假设:乒乓球下落后弹起的高度与落下接触的物体有关。不同的落下接触的物体与乒乓球下落后弹起的高度不同。
为了保险起见,我设计了以下这个实验:
实验材料:一个乒乓球、刻度尺,各种不同材质的物体
实验步骤:1、将乒乓球放在离物体50cm的地方,然后扔下
2、反复实验三次,测量出弹起的高度
3、在不同的物体上进行实验
4、记录数据,制成表格,进行比较
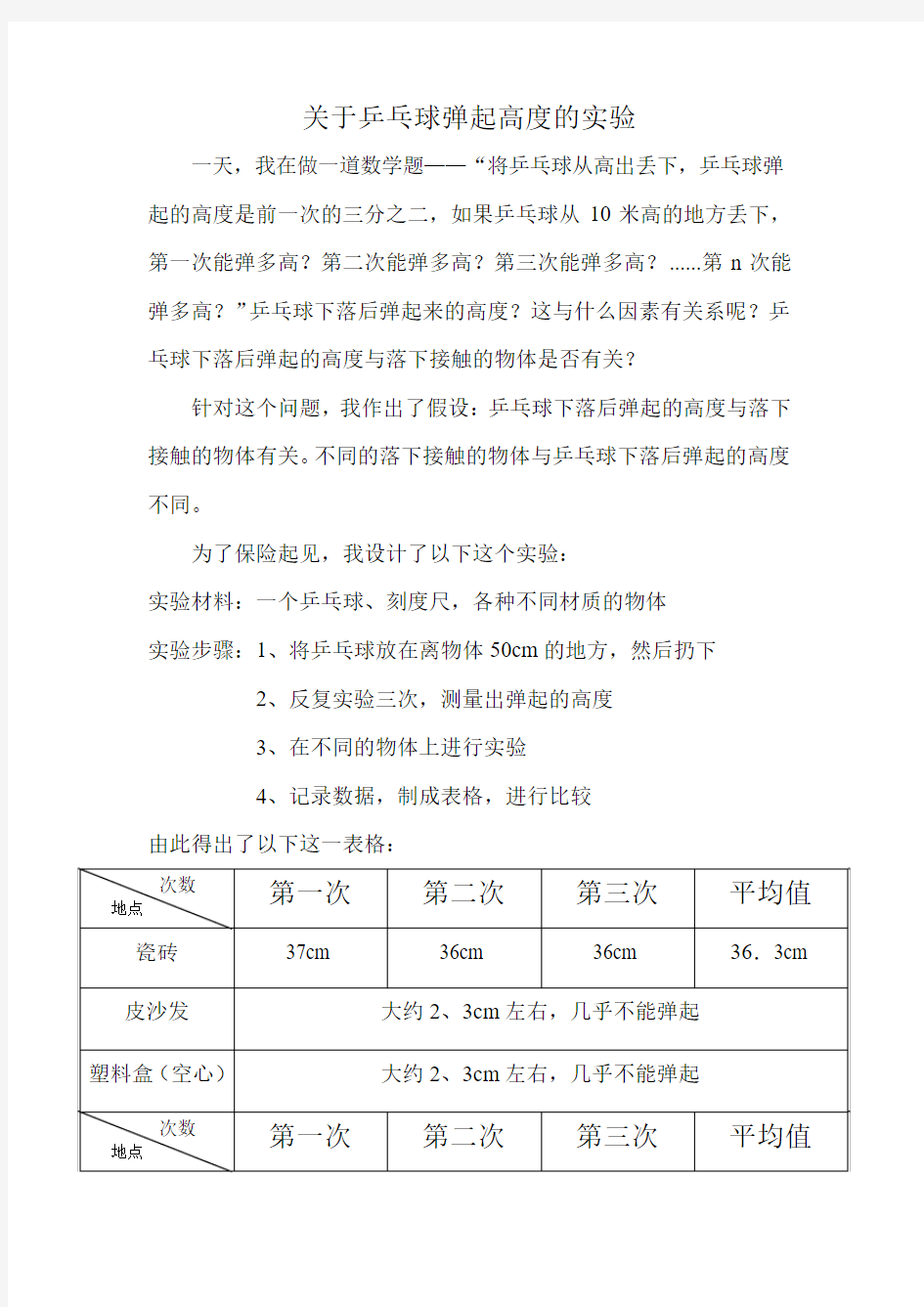
由此得出了以下这一表格:
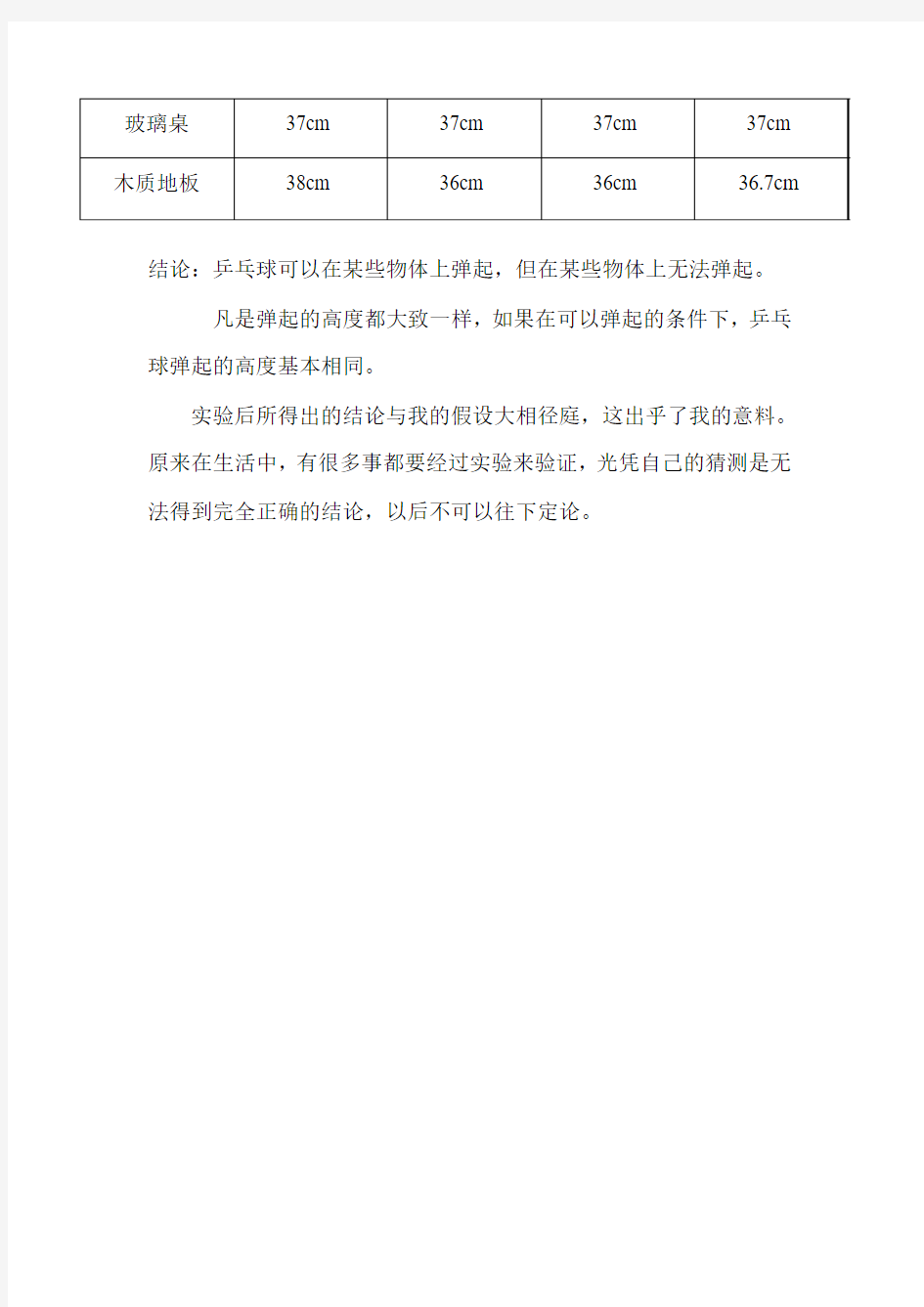
结论:乒乓球可以在某些物体上弹起,但在某些物体上无法弹起。
凡是弹起的高度都大致一样,如果在可以弹起的条件下,乒乓球弹起的高度基本相同。
实验后所得出的结论与我的假设大相径庭,这出乎了我的意料。原来在生活中,有很多事都要经过实验来验证,光凭自己的猜测是无法得到完全正确的结论,以后不可以往下定论。
机器人实验报告
智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间:
实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。
(四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。
机器人实验报告
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
实验一用漏斗吹乒乓球实验
实验一用漏斗吹乒乓球 实验 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
实验一、用漏斗吹乒乓球实验 开始时,我先设问几个实验问题。 1.如果我用嘴直接吹乒乓球,乒乓球会怎么运动同学们说,乒乓球飞了; 2.把球倒扣在漏斗下(把矿泉水瓶底部减去三分二),从漏斗管口吹气,球会怎样,同学们回答球飞了呗。现场做给他们看,果真如此。 3.如果把球放在漏斗嘴里,从瓶口向上吹气,那又会怎样呢有的同学说还是飞了,有的说不一定,有的说球趴着。我吹了一下,同学们发现球并没有飞走,感到疑惑不解。为了能感染同学们的好奇心,我让一位力气大的同学吹乒乓球,结果另好多同学露出了疑惑,为什么乒乓球没有向上运动呢接下来我让那位同学拿着漏斗向下吹乒乓球并向同学们提问乒乓球的运动方向这回多数同学还是说向下运动。但是这位同学的实验结果又更加重了同学们的疑惑。这时我引导同学们分析原因,得出结论。这个实验该我留下很深印象。 不管向哪个方向吹气都会使漏斗内侧气体流速变大压强变小,又因为大气向各个方向都有压强,所以不管向哪个方向吹 气,漏斗中的乒乓球都不会被吹出去。 这个现象反映了流体的流速和压强的关系。当人们用漏斗往下吹乒乓球时,乒乓球不会下落。这是由于乒乓球的上方气 流速度大,压强小,乒乓球的下方则相反,气流的速 度小压强大,于是在乒乓球的上下方产生了向上的压 力,把乒乓球托住。 实验二:用鹌鹑蛋、试管验证大气压实验 实验器材:试管,熟的已去壳的鹌鹑蛋(比试管口略大),试管夹,酒精灯,火柴,水槽,水。 实验方法:1:在试管内装入少量的水,放在酒精灯上加热。 2:当试管内出现大量水蒸气时,把鹌鹑蛋卡在试管口。 3迅速把试管浸入冷水槽里。 实验现象:鹌鹑蛋会进入试管中,并且能持续进入一段距离。
《工业机器人》实验报告
北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验一:工业机器人认识 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解6自由度工业机器人的机械结构,工作原理,性能指标、控制系统,并初步掌握操作。了解6自由度工业机器人在柔性制造系统中的作用。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述工业机器人的机械结构、工作原理及性能指标。 2、描述控制系统的组成及各部分的作用。
3、描述机器人的软件平台及记录自己在进行实际操作时的步骤及遇到的问题以及自己的想法。教师批阅:
北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验二:机器人坐标系的建立 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人建立坐标系的意义;了解机器人坐标系的类型;掌握用D-H方法建立机器人坐标系的方法与步骤。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述机器人建立坐标系的意义以及机器人坐标系的类型。 2、深入研究机器人机械结构,建立6自由度关节型机器人杆件坐标系,绘制机器人杆件坐标系图。
教师批阅:
实验课程:工业机器人实验名称:实验三:机器人示教编程与再现控制 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人示教编程的工作原理,掌握6自由度工业机器人的示教编程与再现控制。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述机器人示教编程的原理。 2、详细叙述示教编程与再现的操作步骤,记录每一个程序点,并谈谈实验心得体会。教师批阅:
吹乒乓球
吹乒乓球 各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢 “萝卜青菜,各有所爱。”有人喜欢玩老鹰捉小鸡的游戏,有人喜欢玩盲人捉人的游戏,有人喜欢玩你画我猜的游戏……但我最喜欢玩吹乒乓球的游戏。 记得那天,我约几个小伙伴来家里玩吹乒乓球的游戏。游戏开始了,第一个小伙伴大摇大摆地走到桌边,就像一个威武的大将军。他鼓起腮帮,就像吹起了两个小气球,用力一吹,才用了三秒钟,球就乖乖地从一个杯子飘到了第二个杯子;再用力一吹,球就顺利地到了终点。你瞧,球好像在炫耀它的成果呢!他高兴得手舞足蹈的。 轮到我了,我迫不及待地走到桌子前,凑近乒乓球一吹,乒乓球就像被施了魔咒似的,死死地赖在第一个杯子里一动不动,我的脸唰的一下就红了,心里也挺不是滋味。忽然,我的耳边响起
了一个声音:“晨希,失败乃成功之母,别着急,有点儿耐心!”我回头一看,是斯斯!他对我微笑着。我深吸一口气,对准乒乓球用力一吹,乒乓球“一路狂奔”,眼间到了第三个杯子里。耶,我成功了,乒乓球真给力! 安溪南坪小学 蔡轩昊 指导老师易梅绸 “萝卜青菜,各有所爱。”有人喜欢玩老鹰捉小鸡的游戏,有人喜欢玩盲人捉人的游戏,有人喜欢玩你画我猜的游戏……但我最喜欢玩吹乒乓球的游戏。 记得那天,我约几个小伙伴来家里玩吹乒乓球的游戏。游戏开始了,第一个小伙伴大摇大摆地走到桌边,就像一个威武的大将军。他鼓起腮帮,就像吹起了两个小气球,用力一吹,才用了三秒钟,球就乖乖地从一个杯子飘到了第二个杯子;再用力一吹,球就顺利地到了终点。你瞧,球好像在炫耀它的成果呢!他高兴得手舞足蹈的。
轮到我了,我迫不及待地走到桌子前,凑近乒乓球一吹,乒乓球就像被施了魔咒似的,死死地赖在第一个杯子里一动不动,我的脸唰的一下就红了,心里也挺不是滋味。忽然,我的耳边响起了一个声音:“晨希,失败乃成功之母,别着急,有点儿耐心!”我回头一看,是斯斯!他对我微笑着。我深吸一口气,对准乒乓球用力一吹,乒乓球“一路狂奔”,眼间到了第三个杯子里。耶,我成功了,乒乓球真给力! 各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢
模拟乒乓球比赛实验报告
实验原始记录 专业、班级_______ 姓名_______ 同组人姓名_________ 课程名称__________________ 实验名称________________ 实验记录: 实验日期任课教师
一、实验目的: 培养综合运用数字电子技术知识进行简易数字电子系统设计,及利用EWB软件进行仿真的能力。 二、实验任务: 1.选题:模拟乒乓球比赛电路 模拟乒乓球比赛通过设计,采用数字芯片实现乒乓球左右移动、选手击球、得分、累计得分到9分报警等功能。该设计三个双向开关S1、S2、S3分别作为裁判和两选手的击球动作,同时选手可以从译码显示器上直接读出自己的得分,具有操作简单、结构清晰的优点。 2.设计目标: 该模拟乒乓球比赛电路主要有4块电路:时钟信号产生电路、球台驱动电路、控制电路和计分电路。其中球台电路主要实现选手击球完毕后球的左右移动显示位置功能;控制电路实现选手击球、裁判功能;计分电路具有当选手击球有效时加分和当选手的分数累计到9分时报警功能。 3.设计要求: 1)用8个发光二极管表示球,将8个发光二极管排成一条直线,以中点为界,两边各代 表参赛双方的位置,其中点亮的发光二极管代表“乒乓球”的当前位置,点亮的发光二极管依次由左向右或由右向左移动。用两个开关和2个发光二极管分别表示AB两个球员的球拍; 2)一方发球后,球以固定的速度向另一方运动(发光二极管依次逐个点亮),当球达到另 一方的最后一个二极管时,参赛者应立即按下自己一方的按钮,即表示击球,若击中,则“球”向相反方向运动,若未击中,则对方得1分。 A、B各有一个数码管计分。 3)裁判有一个按钮,用来对使选手准备,每次得分后按下一次。 三、设计注意事项: 1)选用Workbench含有的芯片。
机器人实验指导书
实验一 机器人运动学实验 一、基本理论 本实验以SCARA 四自由度机械臂为例研究机器人的运动学问题.机器人运动学问题包括运动学方程的表示,运动学方程的正解、反解等,这些是研究机器人动力学和机器人控制的重要基础,也是开放式机器人系统轨迹规划的重要基础。 机械臂杆件链的最末端是机器人工作的末端执行器(或者机械手),末端执行器的位姿是机器人运动学研究的目标,对于位姿的描述常有两种方法:关节坐标空间法和直角坐标空间法。 关节坐标空间: 末端执行器的位姿直接由各个关节的坐标来确定,所有关节变量构成一个关节矢量,关节矢量构成的空间称为关节坐标空间。图1-1是GRB400机械臂的关节坐标空间的定义。因为关节坐标是机器人运动控制直接可以操纵的,因此这种描述对于运动控制是非常直接的。 直角坐标空间: 机器人末端的位置和方位也可用所在的直角坐标空间的坐标及方位角来描述,当描述机器人的操作任务时,对于使用者来讲采用直角坐标更为直观和方便(如图1-2)。 当机器人末端执行器的关节坐标给定时,求解其在直角坐标系中的坐标就是正向运动学求解(运动学正解)问题;反之,当末端执行器在直角坐标系中的坐标给定时求出对应的关节坐标就是机器人运动学逆解(运动学反解)问题。运动学反解问题相对难度较大,但在机器人控制中占有重要的地位。 图1-1 机器人的关节坐标空间 图1-2 机器人的直角坐标空间法
机器人逆运动学求解问题包括解的存在性、唯一性及解法三个问题。 存在性:至少存在一组关节变量来产生期望的末端执行器位姿,如果给定末端执行器位置在工作空间外,则解不存在。 唯一性:对于给定的位姿,仅有一组关节变量来产生希望的机器人位姿。机器人运动学逆解的数目决定于关节数目、连杆参数和关节变量的活动范围。通常按照最短行程的准则来选择最优解,尽量使每个关节的移动量最小。 解法:逆运动学的解法有封闭解法和数值解法两种。在末端位姿已知的情况下,封闭解法可以给出每个关节变量的数学函数表达式;数值解法则使用递推算法给出关节变量的具体数值,速度快、效率高,便于实时控制。下面介绍D-H 变化方法求解运动学问题。 建立坐标系如下图所示 连杆坐标系{i }相对于{ i ?1 }的变换矩阵可以按照下式计算出,其中连杆坐标系D-H 参数为由表1-1给出。 齐坐标变换矩阵为: 其中描述连杆i 本身的特征;和描述连杆i?1与i 之间的联系。对于旋转关节,仅是关节变量,其它三个参数固定不变;对于移动关节,仅是关节变量,其它三个参数不变。
吹乒乓球游戏精选作文
吹乒乓球游戏精选作文 吹乒乓球游戏精选作文 “哈,我们赢了!”“啊?我输了?”一阵阵欢笑声从教室传来。咦?这个班的学生在干什么啊?哦,原来是301教室正在进行一项有趣的活动:吹乒乓球比赛。 第三节一上课,王教师就快步走上讲台,对大家说:“今天,我们玩一个跟乒乓球有关的游戏,叫‘吹乒乓球’。”王教师刚一说完,全班就沸腾了。“我今天带乒乓球了。”“我肯定赢!”等全班静下来,王教师宣布了比赛规则:“三张桌子为一组,每组准备一只乒乓球,把三张桌子拼在一起,课桌中间画上一条线,将球放在线上,再选两名同学站在桌子两边,一个同学当裁判。裁判一声令下,双方开始吹球,乒乓球在哪方落地,哪方失败。三局两胜。都明白了吗?”“明白了!” 我们组迅速把桌子拼好,开始比赛。第一局结束时,一位组员建议三对三,由原来的男生对男生、女生对女生改成了三位男生对三位女生。 “开始!”一位女生一声令下,我们就开始了比赛,大家都使劲地吹。我鼓起腮帮子,一口气接一口气地吹,腮帮子就像一只装满气的大气球,带动乒乓球忽左忽右。只见小小的乒乓球在桌面上一会儿往男生这边跑,一会儿往女生这边奔,就是不落地。就在双方都觉得腮帮子发酸时,突然一位男生在我们毫不在意的时候,深呼一口气,
用力一吹乒乓球,只听“呼”的一声,女生还没反应过来,乒乓球就落地了。第一局,男生赢了。 第二局,三个女生发挥“巾帼不让须眉”的精神,齐心协力,赢了男生。 第三局,那些男生害怕输给女生,气急败坏,连连犯规,气得我们女生都不想跟他们比了。在我们的坚持下,双方打平。 虽然这是一个很简单的游戏,但我觉得它的规则、它所需要的精神在日常生活中的许多事情上都能体现出来,不是吗? 吹乒乓球游戏精选作文 今天,我们班举行了“吹乒乓球”比赛,比赛十分有趣,游戏规则:用八个杯子、水和一个乒乓球,把八个杯子里灌满水,然后把乒乓球入杯子里,再用嘴轻轻地吹乒乓球,把球从第一个杯子吹到第四个杯子里,要看谁先进谁就赢。 每两个小组选三个人来比赛,我们选的是刘裕昕、刘戴源、杨卓行,这三个人都信心满满的上去应战。而对方的选手是贾云皓、周昱晟、张文璟。第一局刘裕昕对战贾云皓,开始了,刘裕昕迈着轻微地步伐而且面带浅笑的上去了,而对手仿佛也不甘示弱呢!刘裕昕轻轻地吹着球,只见球从第一个杯子跳到了二个,第三个,最后,刘裕昕用力一吹,吹到第四个杯子里“耶,”三四组的同学大叫着。而对手贾云皓吹到第二个杯子时掉落在了地下。刘裕昕赢了。 接下来的第二局、第三局比赛我们组都获得了胜利。而对手虽然失败了,可他们没有灰心,他们相信下一次一定会胜过我们。
初中物理实验报告的范文
初中物理实验报告的范文 篇一:初中物理实验报告(921字) 器材 找一个底面很平的容器,让一个蜡烛头紧贴在容器底部,再往容器里倒水,蜡烛头并不会浮起来;轻轻地把蜡烛头拨倒,它立刻就会浮起来。 可见,当物体与容器底部紧密接触时,两个接触面间就没有液体渗入,物体的下表面不再受液体对它向上的压强,液体对它就失去了向上托的力,浮力当然随之消失了。 现在,你能提出为潜艇摆脱困境的措施了吗? “浮力是怎样产生的”,学生对“浮力就是液体对物体向上的压力和向下的压力之差”这一结论是可以理解的,但却难以相信,因此做好浮力消失的实验是攻克这一难点的关键,下面介绍两种简便方法。 [方法1] 器材:大小适当的玻璃漏斗(化学实验室有)一个、乒乓球一只、红水一杯。 步骤: (1)将乒乓球有意揿入水中,松手后乒乓球很快浮起。 (2)用手托住漏斗(喇叭口朝上,漏斗柄夹在中指和无名指之间),将乒乓球放入其中,以大拇指按住乒乓球,将水倒入漏斗
中,松开拇指,可见乒乓球不浮起,(这时漏斗柄下口有水向下流,这是因为乒乓球与漏斗间不太密合)。 (3)用手指堵住出水口,可见漏斗柄中水面逐渐上升,当水面升至乒乓球时,乒乓球迅即上浮。(若漏斗柄下口出水过快,可在乒乓球与漏斗接触处垫一圈棉花,这样可以从容地观察水在漏斗柄中上升的情况。) [方法2] 器材:透明平底塑料桶(深度10cm左右,口径宜大些,便于操作)一只、底面基本平整的木块(如象棋子、积木、保温瓶塞等)一个、筷子一根、水一杯。 制作小孔桶:取一铁扦在酒精灯上烧红,在塑料桶底面中央穿一小孔、孔径1cm左右,用砂纸将孔边磨平即成一小孔桶。 步骤: (1)将木块有意揿入水中,松手后木块很快浮起。 (2)将木块平整的一面朝下放入小孔桶中并遮住小孔,用筷子按住木块,向桶中倒水。移去筷子,可见木块不浮起。(这时小孔处有水向下滴,这是因为木块与桶的接触面之间不很密合)。 (3)用手指堵住小孔,木块立即上浮。 上述两例针对实际中物体的表面不可能绝对平滑这一事实,巧妙地利用“小孔渗漏”使水不在物体下面存留,从而使物体失去液体的向上的压力,也就失去了浮力,结果本应浮在水面上的
实验一、用漏斗吹乒乓球实验
实验一、用漏斗吹乒乓球实验 开始时,我先设问几个实验问题。 1.如果我用嘴直接吹乒乓球,乒乓球会怎么运动?同学们说,乒乓球飞了; 2.把球倒扣在漏斗下(把矿泉水瓶底部减去三分二),从漏斗管口吹气,球会怎样,同学们回答球飞了呗。现场做给他们看,果真如此。 3.如果把球放在漏斗嘴里,从瓶口向上吹气,那又会怎样呢?有的同学说还是飞了,有的说不一定,有的说球趴着。我吹了一下,同学们发现球并没有飞走,感到疑惑不解。为了能感染同学们的好奇心,我让一位力气大的同学吹乒乓球,结果另好多同学露出了疑惑,为什么乒乓球没有向上运动呢? 接下来我让那位同学拿着漏斗向下吹乒乓球并向同学们提问乒 乓球的运动方向?这回多数同学还是说向下运动。但是这位同学的实验结果又更加重了同学们的疑惑。这时我引导同学们分析原因,得出结论。这个实验该我留下很深印象。 不管向哪个方向吹气都会使漏斗内侧气体流速变大压强变小,又因为大气向各个方向都有压强,所以不管向哪个方向吹气, 漏斗中的乒乓球都不会被吹出去。
这个现象反映了流体的流速和压强的关系。当人们用漏斗往下吹乒乓球时,乒乓球不会下落。这是由于乒乓球的上方气流速 度大,压强小,乒乓球的下方则相反,气流的速度小压 强大,于是在乒乓球的上下方产生了向上的压力,把乒 乓球托住。 实验二:用鹌鹑蛋、试管验证大气压实验 实验器材:试管,熟的已去壳的鹌鹑蛋(比试管口略大),试管夹,酒精灯,火柴,水槽,水。 实验方法:1:在试管内装入少量的水,放在酒精灯上加热。 2:当试管内出现大量水蒸气时,把鹌鹑蛋卡在试管口。 3迅速把试管浸入冷水槽里。 实验现象:鹌鹑蛋会进入试管中,并且能持续进入一段距离。 实验说明:大气压强存在。 精彩之处:本实验改掉课本中瓶吞鸡蛋的实验的缺点:时间短,还没看清,鸡蛋就已进入瓶内。本实验可让学生看到大气压 力作用的过程,时间长,有感性认识。
智能足球实验报告
智能足球实验报告 篇一:实验报告 实验报告 这周,我们去西部自动化楼的自主机器人实验室参观了学校的自主机器人。以前看变形金刚认为机器人的无所不能太虚拟,自己对这方面也不太了解。但通过这次参观后,我对机器人有了初步了解。还记得当时看功夫足球时最后一场比赛人与机器人比赛太虚拟,但当老师给我们放RoboCup中型足球机器人比赛时,自己才感觉到原来机器人踢球也很好玩,机器人踢球也并不虚拟。这次参观并近距离接触后,才知道机器人是怎样踢球的。我看到机器人内部有各种传感器、控制器,机器人就靠这些传感器构成了其里面的各个系统,比如视觉系统,通讯系统等等,它们靠着这些系统在无外界人为信息输入和控制的条件下,独立完成踢球的任务。而且通过老师播放的视频,足球机器人比赛的精彩程度不亚于真实的比赛。随着机器人的不断发展,我想人机大战将很快会实现。?另外,我们还参观了服务机器人,听老师介绍,这是上大自强队比赛用过的机器人。看着它的那支“手”,自己不禁感觉现代社会的科技发展确实迅猛啊!想想原来要让机器人干家务活几乎是天方夜谭,这几乎是不可能办到的事,但现在,一切皆有可能呀!不禁让人感慨啊!而且听老师讲服务机器人的应用范围很广,不仅仅做家务还
可从事维护保养、修理、运输、清洗、保安、救援、监护等工作。他可以是护士的助手,可以是智能轮椅,还可以······而且看了几段上大服务机器人的比赛,对他们能识别不同的环境大为吃惊,不仅仅是主人,物品,甚至连房间的路径也能识别,确实很棒。我想,随着社会的发展,机器人将无处不在,在社会的各个领域都会出现他的身影。 尽管家庭机器人尚未完全产业化,但我想今天的机器人就像20年前的微型计算机一样,作为计算机技术及现代IT综合技术的一个必然延伸,家庭机器人技术将以前所未有的速度实现突破和发展。在不久的将来,社会会因机器人发展而发展,人们的生活也会因机器人的改变而改变。 或许我们现在也会因机自主器人这门课而改变些什么吧!拭目以待吧! 智能自主足球机器人系统的关键技术有机器人控制系统的体系结构、移动机器人自定位、实时视觉、多机器人传感器融合、多机器人协作、机器人的学习等多项关键技术。全自主机器人足球比赛的特点是每个机器人完全自治,即每个机器人必须自带各种传感器、控制器、驱动器、电源等设备。比赛中,各机器人队不允许使用全局视觉,也不允许人为的干预。 ? 篇二:智能足球机器人论文
乒乓球弹壁模拟实验报告
上海电力学院嵌入式系统课程设计报告 题目: 乒乓球的弹壁模拟演示 姓名: 学号: 院系:电子与信息工程学院 专业年级:电子信息工程2010级 同组成员: 2013 年7月10日
一、实验目的 ARM9硬件平台程序设计要求通过对ARM硬件体系结构和S3C2410实验箱硬件模块的理解,能够自行创建、设置工程和编写程序代码、编译、调试运行来实现某种简单的应用,如计算器、电子闹钟等。加强对C语言和ARM汇编指令的编程锻炼以及ARM硬件接口功能的理解。 二、实验环境 硬件:PC机,ARM仿真器,S32410实验箱 软件:Keil uVision 三、实验内容 设计题目:乒乓球的弹壁模拟演示 设计要求: 在LCD 屏幕上模拟给乒乓球一初始速度,假设该环境无能量损耗,让乒乓球在该环境下进行弹壁运动。 1.基本要求 (1)该环境设有上下左右四面墙,让乒乓球在该环境下自由运动,碰到墙壁则反弹,否则按照匀速方式运动。 (2)在教学实验箱的LCD 上绘制四面墙和一个乒乓球,按下开始键则给乒乓球一初始速度,指定一个方向开始运动;按下停止键则停止乒乓球的运动;按下暂停键则暂停乒乓球的运动,再按该键则继续运动。 2. 扩展内容 (1)假设该环境有重力,让乒乓球模拟在有重力的环境下运动。 (2)用键盘按键可设定乒乓球的运动速度,也可利用按键在乒乓球运动的过程中给它提速。(3)统计乒乓球碰撞的次数,并将其在LCD 上显示出来。 四、设计思路 1、本次实验所需用到的硬件模块:①LCD(用来显示乒乓球撞壁过程);②键盘(用来控制乒乓球的运动和速度);③LED(用来显示乒乓球的碰撞次数)。 2、因为本次实验要使LCD显示,并通过键盘产生中断控制乒乓球的运动状态和速度,所以本次实验主要同到的.c 文件主要是keyboard.c,lcd.c,led.c和main.c,主要在这几个文件上进行编程。本次实验的关键是如何在LCD中显示乒乓球,乒乓球在碰到壁后如何实现计数加一,如何用键盘产生中断控制乒乓球的状态及速度。
机器人足球实验报告
一、实验目的 掌握RoboCup仿真机器人足球比赛相关知识点,具体内容如下: (1)L inux操作系统的熟悉及了解其基本操作。 (2)掌握Linux下如何进行C++编程,了解gcc编译器以及一些简单编辑工具,如:vi、emacs、gedit、Anjuta、Kdevelope等。 (3)启动RoboCup仿真(2D)足球队的比赛。 二、实验设备 硬件环境:PC机 软件环境:操作系统linux 三、实验内容 (1)掌握Linux 一些常用的命令 a)如何找到用户主目录的绝对路径名?在自己的系统上,用户主目录的绝对路径名是 什么? pwd /home/student (2)将当前工作目录从/home/UVA 转到/home/Tsinghua 需要使用什么命令? 如何显示当前目录? cd /home/Tsinghua (3)如何在当前目录下建立子目录RoboCup? mkdir Robcup (4)如何删除子目录RoboCup? rmdir Robcup (5)如何查看当前目录下的内容? ls (6)如何将文件start.sh 的权限设定为:start.sh 属于可读、可写、可执行? chmod 777 start.sh (7)如何将当前目录包括所有子目录全部做备份文件,备份文件名为first.tar? tar xvf dir1 first.tar (8)如何将目录/home 下每一个文件压缩成.gz 文件? tar -zcwf store.tar (9)如何把上例中每个压缩的文件解压,并列出详细的信息? tar xvf store.tar Ls -lg
1、实验目的 (1)了解Demeer5的工作原理 (2)学会对Demeer5进行简单的修改 二、实验设备 硬件环境:PC 软件环境:Linux 三、实验内容 (1)如果可踢球就用最大力踢球 else if( WM->isBallKickable()) // 如果球已知,而且当前球在我脚下(可踢) { VecPosition pos=( PITCH_LENGTH/2.0,(-1 + 2*(WM->getCurrentCycle()%2)) * 0.4 * SS->getGoalWidth() ); soc=kickTo(pos,SS->getBallSpeedMax()); ACT->putCommandInQueue( soc ); // 放入命令队列 ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc )); } (2)如果球不可踢且我是队友中最快到达球的队员,则去截球 else if( WM->getFastestInSetTo( OBJECT_SET_TEAMMATES, OBJECT_BALL, &iTmp ) == WM->getAgentObjectType() && !WM->isDeadBallThem() ) // 如果球不在我的控制范围下,但是当前能最快抢到球的是我,那我就去执行抢球动作{ Log.log( 100, "I am fastest to ball; can get there in %d cycles", iTmp ); soc = intercept( false ); ACT->putCommandInQueue( soc ); ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc )); (3)其他情况按战略点跑位 else if( posAgent.getDistanceTo(WM->getStrategicPosition()) > 1.5 + fabs(posAgent.getX()-posBall.getX())/10.0) // 到了这里就是其他距离球相对远一点的人了,如果离自己的阵形点太远,就跑回自己的阵形点去。 { if(WM->getAgentStamina().getStamina()>SS->getRecoverDecThr()*SS->getStaminaMax()+800) { soc = moveToPos(WM->getStrategicPosition(),PS->getPlayerWhenToTurnAngle()); ACT->putCommandInQueue( soc );
五年级科学下册实验报告单
科学实验报告单1 实验名称物体的沉浮 实验目的观察物体的沉浮 实验材料水槽、水、塑料、小刀、泡沫、橡皮、萝卜、曲别针等各种材料 实验过程实验一:取小石头、木块、橡皮、针等放入水中,观察它们的沉浮。 实验二:1、把水槽放在展台上,从袋中取出泡沫、回形针、萝卜等分别放入水中观察它们的沉浮 2、把小石块、橡皮、泡沫块、萝卜分别切成二分之一、四分之一、八分之一放入水中观察它们的沉浮 实验结论木块、塑料、泡沫在水中是浮的;小石头、回形针在水中是沉的。由同一种材料构成的物体改变它们的体积大小,在水中的沉浮是不会发生改变的。
科学实验报告单2 实验名称影响物体沉浮的因素 实验目的研究物体的沉浮与哪些因素有关 实验材料水槽、小石块、泡沫塑料块、回型针、蜡烛、带盖的空瓶、萝卜、橡皮、一套同体积不同重量的球、一套同重量不同体积的立方体、小瓶子、潜水艇 实验过程实验1.按体积大小顺序排列七种物体,再标出它们在水中是沉还是浮。想一想,物体的沉浮和它的体积大小有关系吗? 实验2、按轻重顺序排列七种物体,再标出它们在水中是沉还是浮。想一想,物体的沉浮和它的轻重有关系吗 实验结论不同材料构成的物体,如果体积相同,重的物体容易沉;如果质量相同,体积小的物体容易沉。
五年级科学下册实验报告单 科学实验报告单3 实验名称橡皮泥在水中的沉浮 实验目的橡皮泥排开水的体积 实验材料水槽、水、塑料、小刀、泡沫、橡皮、萝卜、曲别针等各种材料 实验过程实验一:找一块橡皮泥做成各种不同形状的实心物体放入水中,观察它们的沉浮。 实验二:1、让橡皮泥浮在水面上,用上面同样大小的橡皮泥,改变它的形状,即把橡皮泥做成船形或者空心的,橡皮泥就能浮在水面上。 2、取一个量杯,装入200毫升的水,记录橡皮泥在水中排开水的体积。 实验结论实心橡皮泥质量不变,形状改变,体积也不变,橡皮泥的沉浮不会发生改变。 橡皮泥在水中排开水的体积越大,浮力越大。
用乒乓球做的小实验
用乒乓球做的小实验 深圳市布吉中学高怀勇 1、演示微小形变。在讲解力的作用效果时涉及到不明显形变,一般很难观察到,用以下实验即可解决这一问题:在乒乓球上打一孔并插入一支透明细胶管或玻璃管,内装有颜色水,用手挤压球两侧,可看到管中水位明显发生变化:说明体积变化,即球向内有形变。 2、显示振动,在演示"声音的发生"一节用到音叉,但音叉的振动却不容易观察到,可用如下方法:用细线系一黄色(为了醒目)乒乓球靠近音叉放置,用锤敲音叉的一边,可以观察到乒乓球被不断地弹开。 注意点:无风干扰 3、浮力产生原因 浮力产生原因是浸在液体里的物体受到上下表面的压力差,若下表面无液体就不会产生浮力, 用较大的可乐饮料瓶剪掉底部,留下上半部倒置,将黄色乒乓球压在瓶颈处并注水,乒乓球不会浮起来,然后用手或瓶盖将瓶口封住,由于球和瓶之间渗水,当球下部集满水后,乒乓球会很快上浮。 4、潜水艇模型,玩具注射器,细胶管,黄色乒乓球,铁钉。 通过改变球内水的多少来改变浮沉情况,操作方法是推拉注射器活塞。 5、浮沉条件 三个相同的黄色乒乓球放入水中结果,引学生思考,原因是A是原装,B 注适量水并封闭,使,C是注入足量水,下沉。结论:浮沉与F浮和G的大小有关系,与关系。 6、气体动力--"吹不掉"。玻璃漏斗口朝下,将乒乓球置于口颈处释放,球会掉下;若从上端吹气,则球会贴在颈处不会掉下。原理:空气流动,产生压力,使球不致掉下。 7、流体动力--"冲不走"。把黄色乒乓球置于倒扣的玻璃杯底上,让水笼头中的水流出,可以看到球并没有被冲走,而是在杯底上晃动原理;当球偏离中心时,两侧水流产生的压力差会使球再回到中心。 8、转动力学--"去而复还"。在水平桌面上用手指压在乒乓球的内侧,用力压出,球滚出去后会自动返回,很有趣,这种现象的解释要用到转动力学的知识。 9、动能势能转化 球从一定高度落下,速度越来越大,重力势能减少,动能增加,势能转化为动能;从表面弹起上升,速度越来越小,势能增加,动能减少,动能转化为势能。 10、弹性碰撞 在研究碰撞现象中,对碰撞结果的分析理论较难理解和记忆,用乒乓球演示运动的小物体与静止的大物体相碰结果;大物体不动,小物体被原速弹回效果明显,人人可做。 11、惯性"反常" 我们知道,由于惯性,物体发生状态变化时呈相反状态,即刹车时乘客向
机器人实验报告
机器人实验报告 院系:电气信息工程学院班级:XX级电气X班 姓名:XXX 提交日期:201X年X月X日
前言 作为先进制造业中不可替代的重要装备和手段,工业机器人已经成为衡量一个国家制造水平和科技水平的重要标志。机器人的应用越来越广泛,需求越来越大,其技术研究与发展越来越深入,这将提高社会生产率与产品质量,为社会创造巨大的财富。本文将从工业机器的发展历史,现状及未来趋势进行阐述。机器人技术作为20世纪人类最伟大的发明之一,自20世纪60年代初问世以来,经历了近50年的发展已取得显著成果。走向成熟的工业机器人,各种用途的特种机器人的实用化,昭示着机器人技术灿烂的明天。 一、发展历史 工业机器人诞生于20 世纪60 年代,在20 世纪90 年代得到迅速发展,是最先产业化的机器人技术.它是综合了计算机,控制论,机构学,信息和传感技术,人工智能,仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域.它的出现是为了适应制造业规模化生产,解决单调,重复的体力劳动和提高生产质量而代替人工作业.在我国,工业机器人的真正使用到现在已经接近20 多年了,已经基本实现了试验,引进到自主开发的转变,促进了我国制造业,勘探业等行业的发展.随着我国改革开放的逐渐深入,国内的工业机器人产业将面对越来越大的竞争与冲击,因此,掌握国内工业机器人市场的实际情况,把握 我国工业机器人的相关技术与研究进展,显得十分重要。 二、发展现状 在普及第一代工业机器人的基础上,第二代工业机器人已经推广,成为主流安装机型,第三代智能机器人已占有一定比重(占日本1998年安装台数的10%,销售额的36%) (1)机械结构:1) 已关节型为主流,80年代发明的使用于装配作业的平 面关节机器人约占总量的1/3.90年代初开发的适应于窄小空间,快节奏,360度全工作空间范围的垂直关节机器人大量用于焊接和上,下料.2)应3K 和汽车,建筑,桥梁等行业需求, 超大型机器人应运而生.如焊接树10米长,10吨以上大构件的弧焊机器人群,采取蚂蚁啃骨头的协作机构.3)CAD,CAE 等技术已普遍用于设计,仿真和制造中. (2)控制技术:1) 大多数采用32位CPU,控制轴数多达27轴,NC 技术,离线编程技术大量采用.2) 协调控制技术日趋成熟,实现了多手与变位机, 多机器人的协调控制, 正逐步实现多智能体的协调控制. 采用基于PC 的开放 结构的控制系统已成为一股潮3) 流,其成本低,具有标准现场网络功能. (3)驱动技术:1) 80年代发展起来的AC 侍服驱动已成为主流驱动技术用于工业机器人中.DD 驱动技术则广泛地用于装配机器人中.2) 新一代的侍服电机与基于微处 理器的智能侍服控制器相结合已由FANUC 等公司开发并用于工业机器人中, 在远程控制中已采用了分布式智能驱动新技术. (4)应用智能化的传感器:装有视觉传感器的机器人数量呈上升趋势,不少机器人装有两种传感器,有些机器人留了多种传感器接口. (5)通用机器人编程语言:在ABB 公司的20多个小型号产品中,采用了通用模化块语言RAPID.最近美国"机器人工作空间技术公司"开发了Robot Script V.10通用语言,运行于该公司的通用机器人控制器URC 的Win NT/95环境.该语言易学医用,可用于各种开发环境,与大多数WINDOWS 软件产品兼容. (6)网络通用方式:大部分机器人采用了Ether 网络通讯方式,占总量的41.3,其它采用RS-232,RA-422,RS-485等通讯接口. (7)高速,高精度,多功能化:目前,最快的装配机器人最大合成速度为16.5m/s. 位置重复精度为正负0.01mm. 但有一种速度竞达到80m/s; 而另一种并连机构的NC 机器人, 其位置重复精度大1微秒. (8)集成化与系统化:当今工业机器人技术的另一特点是应用从单机,单
吹乒乓球大赛
吹乒乓球大赛 时间:2019-08-26 13:49:47 | 作者:余昱卿 今天作文班要举行吹乒乓球大赛,有的同学大声尖叫:“好”;有的同学高兴地拍着桌子;还有的同学跃跃欲试一副胸有成竹的样子。当然爱运动的我更是高兴得手舞足蹈。 老师早已把道具准备好了,两排装满水的塑料杯整齐地站在桌子上,像整装待发的小士兵;两个乒乓球散发出橘黄的光,似乎在对我说:“快来玩吧,看看你能不能胜利。” 等老师宣布好游戏规则,便开始了激烈的比赛。首先上场的是小红,只见她双手撑在桌子上,目光紧紧地盯着乒乓球,用嘴对准乒乓球,鼓起腮帮子,使劲地吹了一口气。乒乓球像一个调皮的娃娃,在原地打转就是不肯向前进,水娃娃也调皮地向四处飞去,溅了小红一脸,杯子里漾起了波纹,泛着水花,美丽极了;而乒乓球在杯子里享受地荡起了秋千,摆来摆去,让小红同学难以控制。那个乒乓球似乎在说:“哈哈,想战胜我还早着呢!”小红同学憋足了气,又用力地一吹,结果乒乓球像逃兵一样掉到了桌子上发出“砰砰砰”的声音,它似乎在嘲笑:“嘿嘿,怎么样知道我的厉害了吧!我劝你还是放弃吧!”同学们在一旁呐喊助威,有个同学焦急地说:“小红同学你别慌,心急吃不了热豆腐,慢慢来!”小红同学点了点头,这一次她吸取了前两次的教训,气不能向四周吹去,要集中在乒乓球那里。他深吸一口气对准乒乓球,慢慢地吹了一口气,方向是对的,他才大胆地吹了一口气,这下乒乓球才听话的前进,接下来小红掌握了技巧,便轻松自如地把乒乓球吹到了最后一个杯子里。 到我了,我紧张的手心都出了汗,赶紧深深地吸一口气,两眼对准杯子,就像老虎盯着猎物一样。看到脸色紧绷的我,队友拍拍我的肩膀提醒:“别忘了技巧,相信自己。”“嗯。”我轻轻地吹了一口气,没想到乒乓球竟然听话地向前蹦了一个。“太好了”我在心里暗暗高兴到。俗话说得好:骄兵必败。虽然我顺利地吹了一个,但我并不敢松懈。第二次,乒乓球像跳远冠军一样跳到了第四个。水花都溅到了桌子上,不一会儿桌子变成了河。第三次,乒乓球一弹,一跳,一跃,便稳稳当当地落在最后一个杯子上,我神气地走出赛场,同学们都用羡慕的目光望着我。 这一次吹乒乓球使我知道了,做任何事不要只使用蛮力,要动脑筋。我爱吹乒乓球!
五下科学实验报告单
五年级科学下册实验报告单1 班级::日期 : 年月日 实验名称物体的沉浮 实验目的观察物体的沉浮 实验材料水槽、水、塑料、小刀、泡沫、橡皮、萝卜、曲别针等各种材料 实验过程 实验一:取小石头、木块、橡皮、针等放入水中,观察它们的沉浮。 实验二: 1、把水槽放在展台上,从袋中取出泡沫、回形针、萝卜等分别放入水中观察它们的沉浮 2、把小石块、橡皮、泡沫块、萝卜分别切成二分之一、四分之 一、八分之一放入水中观察它们的沉浮 实验结论 :木块、塑料、泡沫在水中是浮的;小石头、回形针在水中是沉的。由同一种材料构成的物体改变它们的体积大小,在水中的沉浮是不会发生改变的。
五年级科学下册实验报告单2 班级: : 日期: 年月日 实验名称影响物体沉浮的因素 实验目的研究物体的沉浮与哪些因素有关 实验材料水槽、小石块、泡沫塑料块、回型针、蜡烛、带盖的空瓶、萝卜、橡皮、一套同体积不同重量的球、一套同重量不同体积的立方体、小瓶子、潜水艇 实验过程: 实验1.按体积大小顺序排列七种物体,再标出它们在水中是沉还是浮。想一想,物体的沉浮和它的体积大小有关系吗? 实验2、按轻重顺序排列七种物体,再标出它们在水中是沉还是浮。想一想,物体的沉浮和它的轻重有关系吗 实验结论: 不同材料构成的物体,如果体积相同,重的物体容易沉;如果质量相同,体积小的物体容易沉。
五年级科学实验报告单3 班级::日期:年月日 实验名称橡皮泥在水中的沉浮 实验目的橡皮泥排开水的体积 实验材料水槽、水、塑料、小刀、泡沫、橡皮、萝卜、曲别针等各种材料 实验过程 实验一:找一块橡皮泥做成各种不同形状的实心物体放入水中,观察它们的沉浮。 实验二: 1、让橡皮泥浮在水面上,用上面同样大小的橡皮泥,改变它的形状,即把橡皮泥做成船形或者空心的,橡皮泥就能浮在水面上。 2、取一个量杯,装入200毫升的水,记录橡皮泥在水中排开水的体积。 实验结论: 实心橡皮泥质量不变,形状改变,体积也不变,橡皮泥的沉浮不会发生改变。 橡皮泥在水中排开水的体积越大,浮力越大。 科学实验报告单4
智能机器人实验报告
机器人实验报告 1、 实验目的: 1、 认识“能力风暴”机器人,并会简单编辑程序,使其完成规 定动作。 2、 了解“能力风暴机器人内部构造,认识声音、光敏、碰撞等 传感器。 3、 了解AS多功能拓展卡,并能够简单应用。 2、 实验过程: 各组领取能力风暴机器人,老师对其进行讲解,然后各组对其观察,认识,并编辑一些小程序对其进行简单操 作。 1、认识能力风暴机器人 AS-UII有一个功能很强的“大脑”和一组灵敏的“感觉”器官。它不仅可以随着外部环境敏捷地作出反应,而 且还可以与你进行交流。它有听觉、视觉、和触觉,它还 会象人一样使用动作和声音,来表达与它周围世界互动时 的感觉。 开关:控制AS-UII电源的按钮。 电源指示灯:电源指示灯的颜色是绿色。开机时,这个灯会发光,告诉你机器人已经进入工作状态了!
充电指示灯:当你给机器人充电时,充电指示的红灯发光。 充电口:只要将充电器的直流输出端插在充电口上,再将另一端接到 220V电源上即可。 下载口:使用时只需将串口通信线的一端接下载口,另一端连接在电脑机箱后面的一个九针串口上。 “复位/ASOS”按钮:这是个复合按钮,用于下载操作系统和复位。 复位功能:在机器人运行程序的过程中,按下此按钮,机器人就会中断程序的运行。如果要重新运行程序,须按运行键。 下载操作系统功能:连接好串口通信线,打开机器人电源开关,在VJC1.5流程图编辑界面中选择“工具(T)--更新操作系统”命令,然后按下此按钮,即可下载操作系统。 运行键:机器人开机后,按击“运行”键,就可以运行最近下载的程序。 通信指示灯:通信指示灯位于机器人主板的前方,是一个黄色的小灯。在给机器人下载程序时,这个黄灯闪烁,表明下载正常,程序正在进入机器人的“大脑”。