rescue-infra_Hinomiyagura

Hinomiyagura Rescue Simulation Infrastructure Team-Crowd Simulation:Tra?c Simulation Environment by network&area models Kei Sato,Masaru Okaya,Shigeru Yotsukura,and Tomoichi Takahashi
Meijo University,Aichi,Japan
E-mail:ttaka@ccmfs.meijo-u.ac.jp
http://sakura.meijo-u.ac.jp/ttakaHP/Rescue index.html Abstract.Our interests are methods to analyze social phenomena that
result from the behaviors of humans.Disaster and rescue domain is one of
such social phenomena.RCRS provides a good simulation environment
for the disaster&rescue domain.Tools and new simulators have been de-
veloped,and various application?elds using RCRS have been presented.
However,RCRS cannot simulate crowd situations such as evacuation
from buildings,tra?c jams caused by people,etc.We propose a tra?c
simulation environment that consists of a simulator of human behav-
iors in open space,and a GIS map format.The simulator can deal with
crowd simulation in open spaces in town.The new format of GIS map is
based on GML and de?nes properties of open space with the traditional
network properties.
1Introduction
RoboCup Rescue Simulation(RCRS)is a comprehensive simulation system that integrates the results of various disaster simulation and agent actions[6].It was designed to simulate the Hanshin-Awaji earthquake and also other disasters by plugging or replacing components.The architecture of RCRS allows users to customize the simulation environments by inputting the appropriate GIS data, plugging in disaster simulators with their regional peculiarities,and implement-ing their prevention plans as agent codes.Agents autonomously behave according to the situation.Their actions involve evacuation from buildings,going to safe places,asking for help,extinguishing?res,rescuing victims,etc.Multi agent-based simulation(MABS)provides a platform to simulate human behaviors in such social issues.
Casti showed that MABS tra?c planners,TRANSIMS,simulated tra?c pat-terns in Albuquerque,New Mexico,and was used to assess the impact of new road construction[1].Given assumptions that drivers obey red and green lights, but otherwise are free to decide for themselves how to drive,ABS has applied to alleviate tra?c congestion at intersections[3].Implementations of tra?c sim-ulation are important to MABS.Because the agents send their will where they want to go to the tra?c simulator,the tra?c simulation systems collect the
wills,resolve con?icts among the wills if any,and calculate the next location of the agents.
In RCRS,two tra?c simulation systems have been presented.The?rst one was designed to simulate similar behavior as TRANSIMS[4].The tra?c simu-lation used properties related urban tra?c control such as signal controls,turn pockets,etc.With these properties,a micro level simulation was done;however, it caused the simulation of RCRS unstable at the earliest version of RCRS.The second one is a presently used simulator.It was designed to simulate tra?cs at any situations in more stable manners than the?rst one.In2009infrastruc-ture competition,Hinomiyagura proposes a new tra?c environment that will simulate following situations,
–evacuation from buildings,underground malls,
–behaviors of crowds in parks,
–tra?c simulation of cars and pedestrians.
The tra?c environment is composed of followings.
Tra?c simulator:The simulator simulates the behaviors of humans,cars,or other moving objects by network model or free space model depending on the properties of roads.
GML based map format:GIS?les in RoboCup are binary?les with speci?ed properties.The properties are roal related ones such as the length,width of roads,whether it has side walks or not and others.Besides roads,open areas are important at disasters.The open areas are used as refuges,or roads.
2Scenarios that new tra?c simulators are applied to
2.1Rescue Scenarios and problems
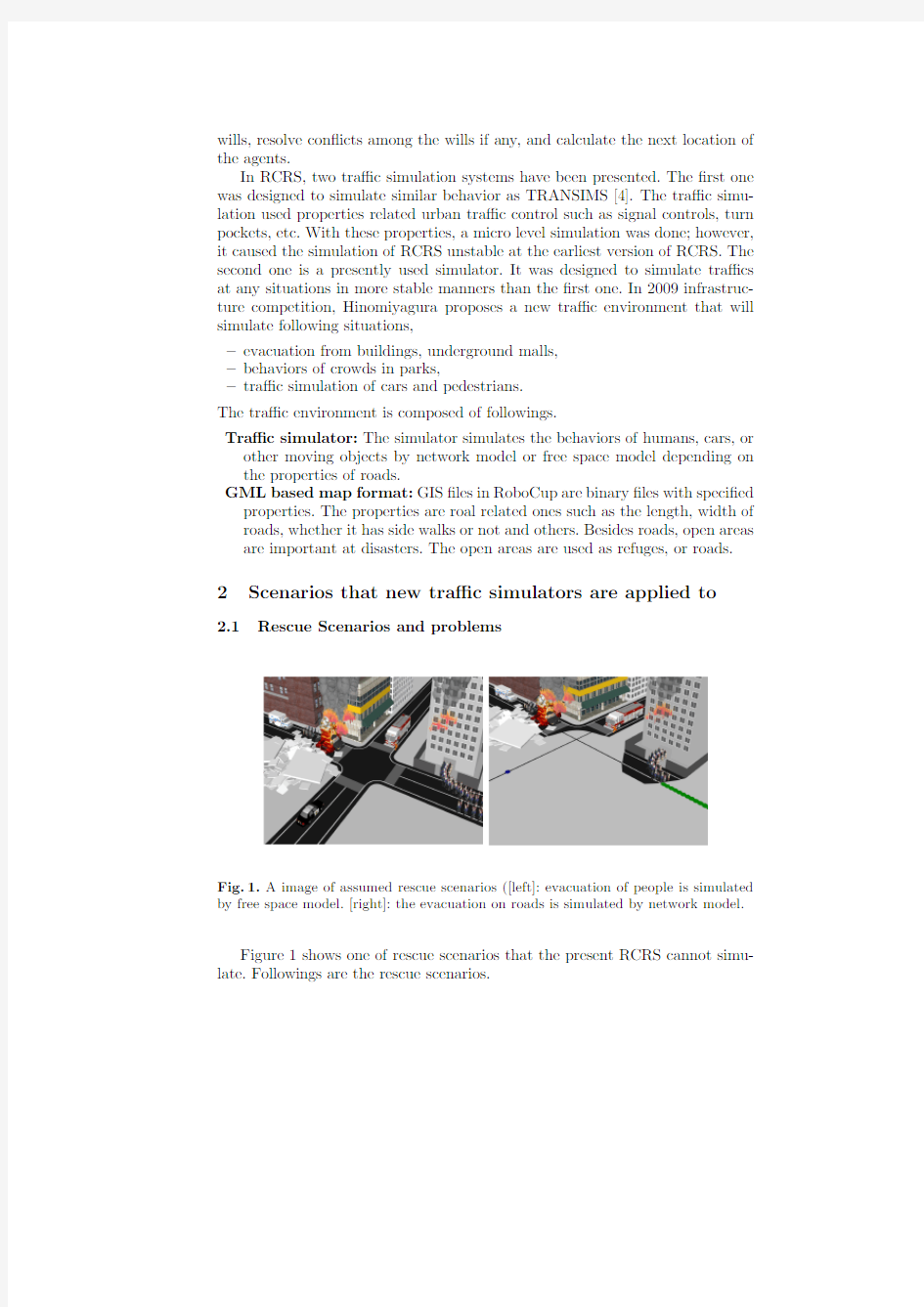
Fig.1.A image of assumed rescue scenarios([left]:evacuation of people is simulated by free space model.[right]:the evacuation on roads is simulated by network model.
Figure1shows one of rescue scenarios that the present RCRS cannot simu-late.Followings are the rescue scenarios.
1.When disasters occur,people in buildings evacuate to outside.Then they go
to parks,for example,that are assigned to refuges.
2.Inside the buildings,people take shelter in a doorway and move to the above-
ground?oor by stairs.
3.Around entrances of buildings,there are many people.They are persons
evacuated from the buildings,and injured persons carried by stretchers.
4.Rescue teams arrive and start to save rescue operations.Some teams carry
the injured to hospitals,others extinguish?res and the others enter the buildings to save ones trapped inside the building.
The left of Figure1shows an image of the evacuation of people and the move-ment of rescue teams from their stations.The behaviors of people are simulated as movements in a free space and the results are presented with3D models. It takes a lot of computation resources,a huge amount of data to model the environment,commutation power to calculate and to present them,etc.
The right of Figure1shows an image of simulations by our tra?c simulation environments.Movements of agents on some parts of roads,such as around the entrance of big buildings or at parks,are simulated by free space model.The movements on the other parts are simulated by the network model that is used in the RCRS.
The tra?c simulation based on the combination of the free space model and the network model makes(1)the required computation resources and powers less than the one in the left?gure,and(2)it possible to simulate the behaviors of human in detail.
2.2System architecture
Figure2shows system architecture that our tra?c environment is used.Follow-ing two issues need to be modi?ed to use our tra?c environment.
GIS:The property area is added to geographical properties of GIS map?les.
GML based?le formats are speci?ed and a new GIS simulation has released.
As a byproduct,a converter from the text?le of GML based format to the bin?les of the present RCRS is also provided.
tra?c simulator:Our tra?c simulator simulates the behavior of agents whether they are on roads or open spaces with the area property.
The rescue agents are the same as ones of the present RCRS.They use the same move commands and others as the RCRS.
3Tra?c Simulation for evacuation behaviors
3.1Crowd simulation in RCRS
Evacuation planning under dynamically changing disaster situations is impor-tant.Inside the buildings,people take shelter in a doorway.Outside the buildings,
Fig.2.System architecture including our tra?c environment.(Our new tra?c simu-lator works for both the present GIS and the new GIS.)
ambulances and?re engines rush to the sites and people move to safe places. There are two approaches for simulating crowd situations.One approach is a model based approach.Models such as a physical model are used to calculate the behaviors[2].The other approach is agent based simulation(ABS).The ABS proceeds the simulation as a result of actions of agents[5].
The ABS approach has advantage that it can simulate rescue operations.The present RCRS has the following two commands that handle rescue operations in buildings.
AK RESCUE:An ambulance team rescues a buried human.
AK LOAD:An ambulance team loads an injured humanoid.
These RCRS command does not re?ect the situations inside buildings or interac-tions among other agents.For the?rst problem,we proposed an idea to combine RCRS and USARSim as one disaster and rescue system[7].
We design a new tra?c simulator for the second problem,because it is as-sumed that the collisions among people are important in simulation of evacuating behavior from building.RCRS(ver.0)was designed to simulate situation of three days after the occurrence of earthquakes.And one simulation step was set to be one minute.1A pedestrian who walks at4km/h proceeds about65m during a 1From subsection11.1of RoboCup-Rescue Simulation Manual,Ver0revision4
minute.This time step is too long for crowd simulations.The time step is divided to short one enough to simulate the collision among people in the crowd.Figure3 shows a screenshot of our new tra?c simulator.On the roads or buildings that have properties of area,it simulates microscopic movements of agents.
Fig.3.Evacuation behavior simulation at disasters.[left]A snapshot of original RCRS. [middle]A new GIS viewer that deal roads with area property.[right]A snapshot of simulations that agents out of an exit of building cut across the area in front of the building.
4Area de?nition and RCRS map format
Area is a new property of GIS to simulate crowds in RCRS.We propose a map format based on GML(XML).The left of Figure4shows the corresponding between the network model and models with area property.The area property is de?ned by the surrounding node points.The left shows a snapshot of map viewer corresponding for the new format.Table1,2and Figure6in appendix shows the tags and geographical de?nitions.
Figure5shows the di?erence in tra?c simulations between the network model and our area model.
–The location of an agent between nodes corresponds to inner points of the area.
–The motions in the area is simulated by free space models.An agent that goes from node2to4is simulated as it goes by the shortest route b,instead of a.In future,several models of human behaviors at open space can be implemented using this model.[2]
5Summary and Discussions
This paper presents a tra?c simulation environment that deals with crowd be-haviors in open spaces in towns.It expands the application?elds of RCRS and makes disaster&rescue simulations practical ones.GML based map?le format makes easy to transform other map?les to RCRS map?les.This leads RCRS are used to simulate at towns all over the world.
https://www.wendangku.net/doc/a55310573.html,work model&corresponding area model property and GML based building &area de?nitions.
Fig.5.Motion simulation in area composed of three surrounding points and one inner point.
References
1.John L.Casti.Would-Be Worlds:How Simulation is Changing the Frontiers of
Science.John Wiley and Sons,1997.
2.I.Farkas D.Helbing and T.Vicsek.Simulating dynamical features of escape panic.
NATURE,407:487–490,Sep.2000.
3.Kurt Dresner and Peter Stone.Multiagent tra?c management:A reservation-based
intersection control mechanism.In The Third International Joint Conference on
Autonomous Agents and Multiagent Systems,pages530–537,July2004.
4.T.Kaneda,F.Matsuno,et al.Simulator complex for robocup rescue simulation
project-as test-bed for multi-agent organizational behavior in emergency case of
large-scale disaster.RoboCup-2000:Robot Soccer World Cup IV,2001.
https://www.wendangku.net/doc/a55310573.html,mmel,M.Rieser,and K.Nagel.Bottlenecks and congestion in evacuation sce-
narios:A microscopic evacuation simulation for large-scale disasters.In5th Work-
shop on AGENTS IN TRAFFIC AND TRANSPORTATION(AAMAS2008),May
2008.
6.RoboCupRescue.https://www.wendangku.net/doc/a55310573.html,/.
7.S.Yotsukura,K.Sato,and T.Takahashi.A framework of simulation system for
rescue control/training center.In SICE Annual Conference2008,Aug2008.
Table1.Tags of network properties
network property gml:Node gml:id ID:unique
gml:directedEdge xlink:href network:EdgeID
orientation”+”/”-”
gml:pointproperty gml:Point gml:coordinates
RCRS:Nodeproperty PROPERTY SIGNAL
PROPERTY SHORTCUT TO TURN
PROPERTY POCKET TO TURN ACROSS
PROPERTY SIGNAL TIMING
gml:Edge gml:id ID:unique
gml:directedNode xlink:href network:NodeID
orientation”+”/”-”
gml:centerLineOf gml:coordinates
RCRS:Roadproperty PROPERTY LENGTH
PROPERTY ROAD KIND
PROPERTY CARS PASS TO HEAD
PROPERTY CARS PASS TO TAIL
PROPERTY HUMANS PASS TO HEAD
PROPERTY HUMANS PASS TO TAIL
PROPERTY WIDTH
PROPERTY BLOCK
PROPERTY REPAIR COST
PROPERTY MEDIAN STRIP
PROPERTY LINES TO HEAD
PROPERTY LINES TO TAIL
PROPERTY WIDTH FOR WALKERS
Table2.Tags of area property
Area property gml:Node gml:id ID:unique
gml:directedEdge xlink:href area:EdgeID
orientation”+”/”-”
gml:pointproperty gml:Point gml:coordinates
gml:Edge gml:id ID:unique
gml:directedNode xlink:href area:NodeID
orientation”+”/”-”
gml:directedFace xlink:href area:FaceID
orientation”+”/”-”
gml:centerLineOf gml:coordinates
linkNode xlink:href network:NodeID
gml:Face gml:id ID:unique
gml:directedEdge xlink:href area:EdgeID
orientation”+”/”-”
info type”building”/”road”/”node”
primaryN network:NodeID
RCRS:BuildingProperty*PROPERTY FLOORS
PROPERTY BUILDING ATTRIBUTES
PROPERTY IGNITION
PROPERTY FIERYNESS
PROPERTY BROKENNESS
PROPERTY ENTRANCES
PROPERTY BUILDING CODE
PROPERTY BUILDING AREA GROUND
PROPERTY BUILDING AREA TOTAL
PROPERTY BUILDING TEMPERATURE
PROPERTY BUILDING IMPORTANCE
Fig.6.De?niton of area property and the relevant tags