PLC实验——机械手控制

1.机械手控制
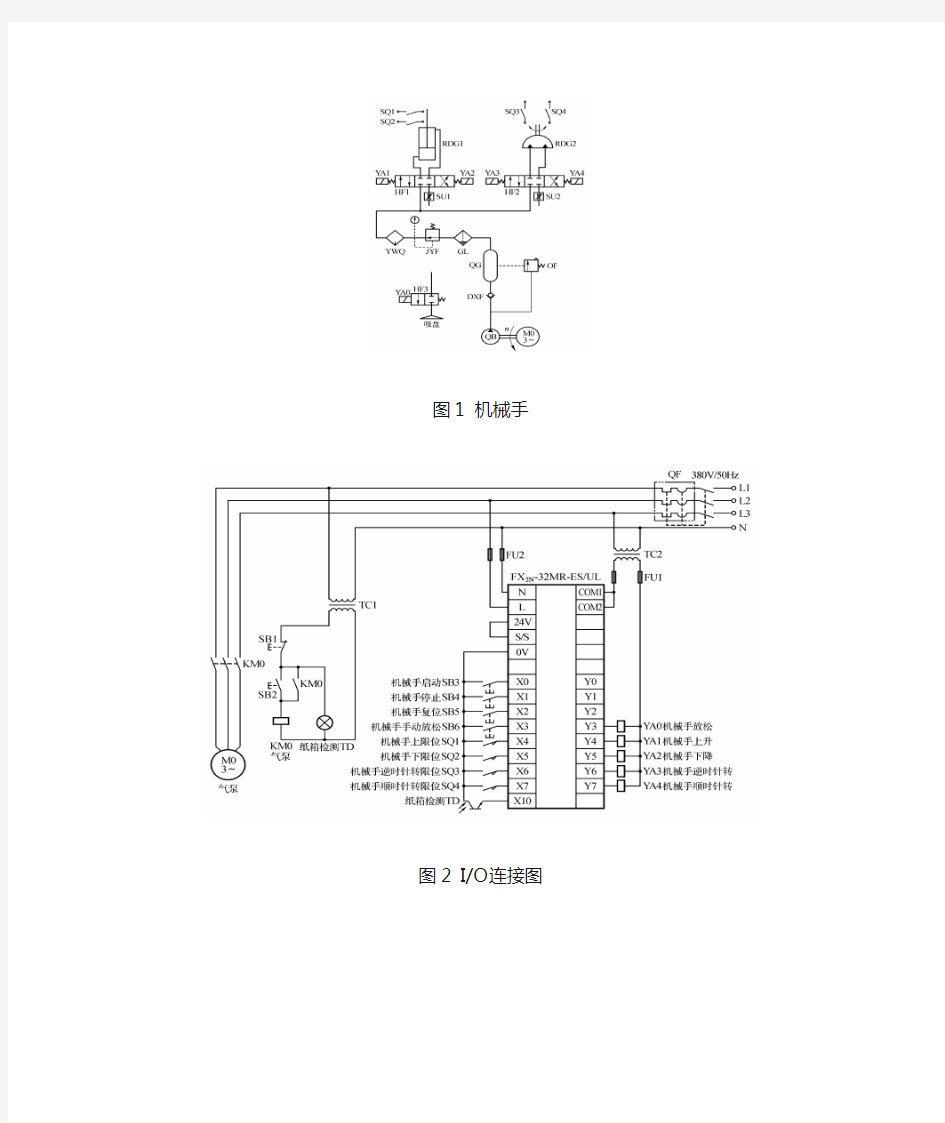
搬运纸箱的机械手结构示意图如图1所示,它的气动系统原理图如图2所示。机械手的主要运动机构是升降气缸和回转气缸。升降挡铁初始时处于行程开关SQ1处,吸盘在A处正上方。系统启动后,如果光电开关TD检测出A处有纸箱,则升降气缸使机械手的升降杆下降,当升降挡铁碰到行程开关SQ2时,吸盘恰好接触到纸箱上表面,继续让升降杆下降,以挤出吸盘和纸箱表面围成的空腔内的空气,形成负压。持续几秒钟,升降杆停止下降,升降气缸使升降杆上升,吸盘带着纸箱上升,当升降挡铁碰到SQ1时,停止上升。回转气缸使回转臂顺时针转180°,吸盘运动至B处正上方,回转挡铁碰到行程开关SQ4时停止回转,吸盘下降,当升降挡铁碰到SQ2时,停止下降,并且停止几秒钟,这时,电磁阀HF3开启,吸盘放松纸箱。之后,吸盘上升,当升降挡铁碰到SQ1时,吸盘逆时针转180°回到A处正上方,回转挡铁碰到行程开关SQ3时停止回转,如果TD未检测出A处有纸箱,则机械手停止等待;若TD检测出A处有纸箱,则机械手重复上述工作过程。机械手的I/O连接图、流程图、梯形图分别如图2、图3、图4所示。
图1 机械手
图2 I/O连接图
图3 流程图
图4 梯形图
最新西华大学机器人创新设计实验报告(工业机械手模拟仿真)
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)
基于PLC的机械手控制系统及组态设计
PLC课程设计报告题目:基于PLC的机械手控制系统及组态设计 二级学院:电气与电子工程学院 班级: 14电气实验班 姓名:李浩文 学号: 组员: 指导老师: 成绩: 日期: 2017年4月
基于PLC的机械手控制系统及组态设计 摘要 随着21世纪的发展,技术科技的不断完善,人们对于机械手的控制系统运用越来越成熟,机械自动化逐步代替了人工操作,这意味着将解放人类劳动力,一些简单重复的动作将会有机器代替运作,并且在某些场所,例如高温高压,有毒气体以及威胁到人类生命安全的环境。为了适应社会需求的变化,人类不断实践和探索,机械手应运而生,相应的各种难题迎刃而解。 本设计主要介绍了国内外机械手研究现状及可编程控制器S7-200 PLC的研究发展趋势,基于PLC编程可知,组态王可以实现与S7-200编程器相结合,组建简单的仿真界面,通过仿真软件可以清晰的了解到机械手的操作,包括上移、下移、左移、右移。实验表明,由S7-200PLC和Kingview6.55构成的控制系统人机界面简单、易于操作、经济实用、可靠性高、稳定性高。 关键词:S7-200PLC;组态王Kingview6.55;机械手
目录 1绪论 (1) 1.1研究该课题的重要性 (1) 1.2国内外机械手研究现状 (1) 1.3该课题研究的内容 (2) 2组态王Kingview 6.55和可编程控制器的介绍 (3) 2.1组态王Kingview 6.55的介绍 (3) 2.1.1组态王的历史 (3) 2.1.2组态王的结构 (3) 2.1.3组态王的基本配置 (5) 2.1.4组态王软件产生的背景 (8) 2.1.5组态软件的发展方向 (8) 2.2可编程控制器的介绍 (10) 2.2.1可编程控制器的概述 (10) 2.2.2可编程控制器的历史 (10) 2.2.3 PLC的基本结构 (11) 2.2.4 PLC的工作原理 (12) 2.2.5 PLC的基本配置 (12) 3机械手控制系统的设计 (15) 3.1机械手控制方式的选择 (15) 3.1.1机械手控制方式的分类 (15) 3.1.2 PLC与IPC和DCS的比较 (15) 3.2 PLC的控制电路程序设计 (16) 3.2.1 PLC的I/O分配表 (16) 3.2.2编程指令的选择 (17) 3.2.4 机械手的动作实现过程 (19) 3.2.5 PLC控制机械手的模拟工作图 (19) 3.2.6 PLC梯形图设计 (21) 3.3 PLC程序的调试 (30) 3.3.1 PLC控制的安装与布线 (30) 3.3.2机械手控制程序的调试 (31) 4组态王Kingview 6.55在机械手控制系统中的应用 (32) 4.1工程的建立与结构变量的定义 (32) 4.1.1工程的建立 (32) 4.1.2建立结构变量的步骤 (33) 4.1.3设备与组态王的连接 (35) 4.2动画的连接 (38)
(完整版)基于plc的机械手控制系统设计
前言 随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化,已愈来愈引起人们的重视。 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。 本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。随着电子技术和计算机技术的迅猛发展,PLC的功能也越来越强大,更多地具有计算机的功能。目前PLC已经在智能化、网络化方面取得了很好的发展。该系统利用西门子PLC,在步进电机驱动下,完成对机械手在搬运过程中的下降、夹紧、上升、右旋、下降、放松、上升、左旋等全过程自动化控制,并对非正常情况实行自动报警和自动保护,实现企业的机电一体化,提高企业的生产效率。
机械手控制实验报告
中北大学 信息商务学院 《机床电气控制与PLC》实验报告 学院: 业:专班级:学号: 姓名:
月6年2014 实验机械手的PLC控制 .实验目的一1.进一步熟悉机床电气控制环节中常用的低压电器,熟练掌握按钮、接触器等低压电器的工作原理及其安装、接线等使用方法。; 2.掌握PLC控制系统设计方法与步骤,掌握PLC的基本硬件配置及硬件连接方法。 3.掌握机械手的基本控制手段,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。二.实验内容及要求 本实验的目的是通过PLC实现机械手的操作控制,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。学生完成PLC控制电路、完成硬件连接、编写控制程序并现场调试。 要求: 1.选择PLC并设计PLC控制电路。要求PLC选型合理、控制方式简单可靠; 2.选取所需的硬件元件完成硬件连接; 3.编写控制程序。要求程序简单可靠、结构合理; 4.系统必须能够调试通过,运转达到设计要求 二.实验仪器及设备 计算机一台、机械手工作台1套、控制按钮若干、PLC基本模块1个、各种导线若干、PLC编程软件。 三.实验步骤 1.根据实验要求,确定要实现的功能并设计状态转移图: 2.根据给定的PLC和所设计的控制功能进行元器件选择和PLC的I/O分配,并填写在表1-1中。表1-1 电机控制I/O分配表 输入输出器件功输出端输入端器件功器件名器件名
3. 根据I/O分配表画出I/O接线图,并连接控制线路。 所设计的控制电路接线图: 4. 根据控制要求编写PLC程序(以梯形图的方式或者指令表方式)。所设计的梯形图或状态转移图: 指令表:
PLC机械手操作控制系统
摘要 在现代工业中 , 生产过程的机械化、自动化已成为突出的主题。随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等。已经随处可见。同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有 毒气体、有害气体场合以及水下作业等,这写恶劣的生产环境不利于人工进行操作。工 业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动 化实践相结合的产物。并以为现代机械制造生产系统中的一个重要组成部分。工业机械 手是提高生产过程自动化、改善劳动条件、提高产品质量和身效益的有效手段之一。尤 其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。在我国, 近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。 机械手是在自动化生产过程中发展起来的一种新装置。广泛应用于工业生产和其他领域。PLC已在工业生产过程中得到广泛应用,应用 PLC控制机械手能实现各种规定工序动作,对生产过程有着十分重要的意义。论文以介绍 PLC在机械手搬运控制中的应用,设计了一套可行的机械手控制系统,并给出了详细的 PLC程序。设计完成的机械手可以在空间抓放、搬运物体等,动作灵活多样。 整个搬运机构能完成四个自由度动作,手臂伸缩、手臂旋转、手爪上下、手爪紧松。关键词:可编程控制器 ,PLC, 机械手操作控制系统 .
目录 第一章概述 (1) 1.1 PLC 控制系统 (1) 1.1.1PLC 的产生 (1) 1.1.2PLC 的特点及应用 (2) 1.2选题背景 (3) 1.2.1机械手简介 (3) 第二章PLC 控制系统设计 (6) 2.1总体设计 (6) 2.1.1制定控制方案 (6) 2.1.2系统配置 (6) 2.1.3控制要求 (9) 2.1.4控制面板 (12) 2.1.5 外部接线图 (13) 2.2.2手动方式状态 (16) 2.2.3回原点状态转移图: (19) 2.2.4自动方式状态 (19) 第三章控制系统内部软组件 (21) 3.1 内部软组件的概述 (21) 3.1.1输入继电器 (21) 3.1.2输出继电器 (21) 3.1.3辅助继电器 (22) 3.1.4状态组件 (23) 3.1.5定时器 (23) 错误!未定义书签。致谢 ........................................................................................................... 参考文献 (24)
课程设计PLC机械手设计
课程设计任务书 一、设计任务: PLC机械手控制的实现 二、设计要求: 1.阐述机械手的工作原理 2.如何实现PLC对机械手的控制 3.机械手控制程序设计 三、设计期限 年月日至年月日
目录 第一节机械手的工作原理 1.1 机械手的概述 (1) 1.2 机械手的工作方式 (2) 第二节机械手控制程序设计 2.1 输入和输出点分配表及原理接线图 (3) 2.2 控制程序 (4) 第三节梯形图及指令表 3.1 梯形图 (8) 3.2 指令表 (9) 总结与评价 (10) 参考文献 (11)
第一节机械手的工作原理 1.1机械手的概述 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。 机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,例如: (1)机床加工工件的装卸,特别是在自动化车床、组合机床上使用较为普遍。 (2)在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械行业中它可以用来组装零部件。 (3)可在劳动条件差,单调重复易子疲劳的工作环境工作,以代替人的劳动。(4)可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。(5)宇宙及海洋的开发。 (6)军事工程及生物医学方面的研究和试验。
1 1.2 机械手的工作方式 机械手电气控制系统,除了有多工步特点之外,还要求有连续控制和手动控制等操作方式。工作方式的选择可以很方便地在操作面板上表示出来。当旋钮打向回原点时,系统自动地回到左上角位置待命。当旋钮打向自动时,系统自动完成各工步操作,且循环动作。当旋钮打向手动时,每一工步都要按下该工步按钮才能实现。以下是设计该机械手控制程序的步骤和方法。 1、机械手传送工件系统示意图,如图1所示。 图1 机械手传送示意及操作面板图
基于PLC的机械手臂设计
毕业设计(论文) 题目: 机械手的PLC控制 专业: 机电一体化 班级: 学号: 姓名: 指导老师: 成都电子机械高等专科学校 xxxx年x月
摘要 机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。本文介绍的机械手是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC 主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。 关键词:机械手 PLC 变频器交流电机
Abstract Manipulator industrial robot systems traditional mandate, Robot is one of the key components. Manipulator using the mechanical structure of screw-ball, slider, and other mechanical devices composition; Electric have AC motor, inverter, sensor, and other electronic device components. The device covers a programmable control technology, position control technology, detection technology, Mechatronics is a typical representative of one of the machines. This paper presents a manipulator by three PLC output pulse, driving horizontal, the vertical axis transducer, control manipulator axis horizontal and vertical positioning precision, micro-switches position signal transmission will host PLC; location close to the switching signal from the feedback from the mainframe to the PLC, through the exchange of Motor reversion to control the manipulator gripper Zhang, thus achieving accurate manipulator movement functions. The topics to be developed by the Manipulator grasping be up in space objects, movements flexible, diverse, can replace the artificial heat and dangerous operation conducted operations, According to the workpiece can change the campaign process and the requirements of any changes to the relevant parameters. Key Words: Manipulator PLC Inverter AC motor
机电一体化技术实验报告材料(手写)
实验一四节传送带控制 一、实验目的 1.掌握传送指令的使用及编程 2.掌握四节传送带控制系统的接线、调试、操作 三、面板图 四、控制要求 1.总体控制要求:如面板图所示,系统由传动电机M1、M2、M3、M4,故障设置开关A、 B、C、D组成,完成物料的运送、故障停止等功能。 2.闭合“启动”开关,首先启动最末一条传送带(电机M4),每经过1秒延时,依次启动一条传送带(电机M3、M2、M1)。 3.当某条传送带发生故障时,该传送带及其前面的传送带立即停止,而该传送带以后的待运完货物后方可停止。例如M2存在故障,则M1、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。 4.排出故障,打开“启动”开关,系统重新启动。 5.关闭“启动”开关,先停止最前一条传送带(电机M1),待料运送完毕后再依次停止M2、M3及M4电机。
五、功能指令使用及程序流程图 1.传送指令使用 X0000为ON时,将源容向目标容传送,X0000为OFF时,数据不变化。 2.程序流程图 六、端口分配及接线图 序号PLC地址(PLC端子)电气符号(面板端 子) 功能说明 1X00 SD 启动(SD) 2X01 A 传送带A故障模拟3X02 B 传送带B故障模拟4X03 C 传送带C故障模拟5X04 D 传送带D故障模拟6Y00 M1 电机M1 7Y01 M2 电机M2 8Y02 M3 电机M3 9Y03 M4 电机M4 10主机COM、面板COM接电源GND 电源地端 11主机COM0、COM1、COM2、COM3、COM4、COM5、 接电源GND 电源地端 12面板V+接电源+24V 电源正端2.PLC外部接线图
机器人实验报告
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
基于PLC控制的机械手设计(毕业论文)第一章绪论
第一章绪论 1. 1 PLC简介 可编程控制器简称PLC(Progrsmmable Logic Controller, PLC),它是以微处理器为基础服务夫人通用工业控制装置。国际电工委员会(IEC)在1985年的PLC标准草案第3稿中,对PLC作了如下定义:“可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计算和算术运算等操作的指令,并通过数字式、模拟式的输出和输入,控制各种类型的机械或生产过程。可编程控制器及其有关设备,都应按易于工业控制系统形成一个整体,易于扩充其功能的原则设计。”可编程控制器是一种通用的工业控制计算机。它的程序是可以控制不同的对象。具有更大的灵活性,再加上体积小、工作可靠性高、抗干扰能力强、控制功能完善,适应性强,安装接线简单等众多优点,它可以方便地应用在各种场合,PLC釆用了典型的计算机结构,主要是山微处理器(CPU)、存储器(RAM/R0M)、输入输出接口(I/O)电路、通信接口及电源组成。 中央处理单元(CPU)是可编程逻辑控制器的控制中枢。它按照可编程逻辑控制器系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。当可编程逻辑控制器投入运行时,首先它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映象区,然后从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。等所有的用户程序执行完毕之后,最后将I/O 映象区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。 PLC的主要特点,可靠性高、抗干扰能力强功能完善、应用领域广编程简单,易学易用系统安装简单、体积小、价格低可编程控制器的应用领域PLC在钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业的应用也越来越广泛,主要有以下儿个方面的控制,开关量的逻辑、控制模拟量控制、运动控制过程控制、数据处理通信及联网。PLC通信含PLC间的通信及PLC与其他智能设备间的通信。随着现代社会计算机技术的提高,网络通讯技术的不断发展,它也将和其他的工业控制计算
机械手自动操作控制的PLC程序的设计说明
中北大学 信息商务学院 课程设计说明书 学生:学号: 系:机械自动化系 专业:机械设计制造及其自动化 题目:数控技术课程设计 ——机械手自动操作控制的PLC程序设计 指导教师:职称: 职称: 2016年12月5日
中北大学 信息商务学院 课程设计任务书 2016/2017 学年第 1 学期 所在系:机械工程系 专业:机械设计制造及其自动化 学生姓名:学号: 课程设计题目:数控技术课程设计 —机械手自动操作控制的PLC程序设计起迄日期: 2016年12月5日~2016年12月9日课程设计地点:中北大学信息商务学院 指导教师: 系主任:暴建岗 下达任务书日期: 2016 年12月 5日
课程设计任务书 1.设计目的: 通过对机械手自动操作控制的PLC程序设计,使学生在熟练机械手的动作顺序与原理的基础上,学会应用PLC。 2.设计容和要求(包括原始数据、技术参数、条件、设计要求等): 机械手将工件从A工作台搬到B工作台。机械手的工作过程由8个动作完成一个循环,如图所示。取放工件的上升/下降和左移/右移分别用YV1、YV3、YV4和YV5控制,夹具的夹紧和放松由电磁阀YV2控制。当工件搬到B工作台返回时,用光电开关SQ7发出无工件信号。 (1)采用部移位寄存器M100~ M117逐位输出方式实现顺序控制,移位条件是对各限位开关(SQ1~SQ6)的状态检测来决定。 (2)夹紧或放松动作,分别用定时器T450、T451延时控制。 (3)采用具有保持功能的辅助继电器M202驱动夹紧阀。 通过本课程设计,完成 ①输入输出信号分析与PLC I/O分配图 ②PLC选型 ③主要元器件型号的选择 ④主接线图设计 ⑤完成梯形图设计并完成相应指令。 3.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文)、图纸、实物样品等〕: 要求独立完成机械手自动操作控制的PLC程序设计,包括程序的编制和调试,并根据规定格式完成课程设计说明书的撰写。
PLC机械手控制
一、控制任务要求 1、初始化程序OB100,准备工作对需要使用元件复位;对顺序功能的初始步进行置为。 2、主程序OB1 3、子程序FC1:完成手动运行控制;能对A、B、C、M单独进行点动操作;有限位保护 4、子程序FC2:完成自动运行控制;运行时,先判断是否在原点,若不在先回原点; 5、检测到有工件时(由LS6模拟),开始进行工件搬运操作。 二、控制系统硬件配置及其接线 1、控制系统的模块配置 从结构上分,PLC分为固定式和组合式(模块式)两种。固定式PLC包括CPU 板、I/O板、显示面板、内存块、电源等,这些元素组合成一个不可拆卸的整体。模块式PLC包括CPU模块、I/O模块、内存、电源模块、底板或机架,这些模块可以按照一定规则组合配置。 1)CPU的构成 CPU主要由运算器、控制器、寄存器及实现它们之间联系的数据、控制及状态总线构成,CPU单元还包括外围芯片、总线接口及有关电路。内存主要用于存储程序及数据,是PLC不可缺少的组成单元。 2) I/O模块 PLC与电气回路的接口,是通过输入输出部分(I/O)完成的。I/O模块集成了PLC的I/O电路,其输入暂存器反映输入信号状态,输出点反映输出锁存器状态。输入模块将电信号变换成数字信号进入PLC系统,输出模块相反。I/O分为开关量输入(DI),开关量输出(DO),模拟量输入(AI),模拟量输出(AO)等模块。常用的I/O分类如下: 3)电源模块 PLC电源用于为PLC各模块的集成电路提供工作电源。同时,有的还为输入电路提供24V的工作电源。电源输入类型有:交流电源(220VAC或110VAC),直流电源(常用的为24VDC)。 4)底板或机架 大多数模块式PLC使用底板或机架,其作用是:电气上,实现各模块间的联系,使CPU能访问底板上的所有模块,机械上,实现各模块间的连接,使各模块构成一个整体。 5) PLC的通信联网 PLC具有通信联网的功能,它使PLC与PLC 之间、PLC与上位计算机以及其他智能设备之间能够交换信息,形成一个统一的整体,实现分散集中控制。多数PLC具有RS-232接口,还有一些内置有支持各自通信协议的接口。PLC的通信现在主要采用通过多点接口(MPI)的数据通讯、PROFIBUS 或工业以太网进行联网。 2、PLC的I/O配置情况 输入(I)输出(Q)
工业机器人实验报告
竭诚为您提供优质文档/双击可除工业机器人实验报告 篇一:《工业机器人》实验报告 北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验一:工业机器人认识 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解6自由度工业机器人的机械结构,工作原理,性能指标、控制系统,并初步掌握操作。了解6自由度工业机器人在柔性制造系统中的作用。二、实验设备 Fms系统(含6-DoF工业机器人)三、实验内容与步骤 1、描述工业机器人的机械结构、工作原理及性能指标。 2、描述控制系统的组成及各部分的作用。 3、描述机器人的软件平台及记录自己在进行实际操作时的步骤及遇到的问题以及自己的想法。 教师批阅: 北京理工大学珠海学院实验报告
实验课程:工业机器人实验名称:实验二:机器人坐标系的建立 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人建立坐标系的意义;了解机器人坐标系的类型;掌握用D-h方法建立机器人坐标系的方法与步骤。二、实验设备 Fms系统(含6-DoF工业机器人) 三、实验内容与步骤 1、描述机器人建立坐标系的意义以及机器人坐标系的类型。 2、深入研究机器人机械结构,建立6自由度关节型机器人杆件坐标系,绘制机器人杆件坐标系图。 教师批阅: 北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验三:机器人示教编程与再现控制 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人示教编程的工作原理,掌握6自由度工业机器人的示教编程与再现控制。二、实验设备 Fms系统(含6-DoF工业机器人)三、实验内容与步骤
1、描述机器人示教编程的原理。 2、详细叙述示教编程与再现的操作步骤,记录每一个程序点,并谈谈实验心得体会。 教师批阅: 篇二:工业机器人实验报告 工业机器人实验报告 姓名: 年级: 学号: 前言 六自由度工业机器人是个较新的课题,虽然其在国外已经具有了较完善的研究,但是在国内对于它的研究依旧停留在较低的水平上。机器人技术几种了机械工程、电子技术、计算机技术、自动化控制理论及人工智能等多学科的最新研究成果,代表机电一体化的最高成就,是当代科学技术发展最活跃的领域之一。在传统的制造领域,工业机器人经过诞生、成长、成熟期后,已成为不可缺少的核心自动化装备,目前世界上有近百万台工业机器人正在各种生产现场工作。在非制造领域,上至太空舱、宇宙飞船、月球探索,下至极限环境作业、医疗手术、日常生活服务,机器人技术的应用以拓展到社会经济发展的诸多领域。 一、六自由度机械手臂系统的介绍
三自由度机械手臂实验报告书
苏州大学2013级机械电子专业 《机电一体化》实验报告书 学生姓名: 学号: 指导教师: 机电工程学院 2013.11
1 实验目的 培养学生设计、修改方案并掌握利用模型进行检验方案是否正确。 2 实验原理 在进行机构或产品的创新设计时,往往很难判断方案的可行性,如果把全部方案的实物都直接加工出来,不仅费时费力,并且很多情况下设计的方案还需模型来进行实践检验,所以不能直接加工生产出实物。现代的机械设计很多情况下是机电系统的设计,设计系统不仅包含了机械结构,还有动力、传动和控制部分,每个工作部分的设计都会影响整个系统的正常工作。全面考虑这些问题来为每个设计方案制作相应的模型,无疑成本是高昂的,甚至由于研究目的、经费或时间的因素而变为不可能。 慧鱼创意组合模型由各种可相互拼接的零件组成,由于模型充分考虑了各种结构、动力、控制的组成因素,并设计了相应的模块,因此可以拼装成各种各样的模型,可以用于检验学生的机械结构设计和机械创新设计。 3 实验设备和工具 慧鱼创意组合模型、电源、计算机、控制软件等。 4 实验准备工作 熟悉慧鱼创意组合模型的拼装,领取模型。 5 实验方法与步骤 1)根据教师给出的创新设计题目或范围,经过小组讨论后,拟定初步设计方案。 2)将初步设计方案交给指导教师审核。 3)审核通过后,按比例缩小结构尺寸,使该设计方案可由慧鱼创意组合模型进行拼装。 4)选择相应的模型组合包。 5)根据设计方案进行结构拼装。 6)安装控制部分和驱动部分。 7)确认连接无误后,上电运行。 8)必要时连接电脑接口板,编制程序,调试程序。步骤为:先断开接口板、电脑的电源,连接电脑及接口板,接口板通电,电脑通电运行。根据运行结果修改程序,直 至模型运行达到设计要求。 9)运行正常后,先关电脑,再关接口板电源。然后拆除模型,将模型各部件放回原存放位置。 6慧鱼创意组合模型的说明 1)构件的分类慧鱼创意组合模型的构件可分成机械构件、电器构件、气动构件等几大部分。 机械构件主要包括: 齿轮、连杆、链条、齿轮(圆柱直齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮)、齿轮轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱、铰链等。 电器构件主要包括: 直流电机(9V双向),红外线发射接收装置、传感器(光敏、热敏、磁敏、触敏),发
基于PLC的工业机械手控制系统设计
基于PLC的工业机械手控制系统设计 摘要 机械手是工业自动化领域中经常遇到的一种控制对象。近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。机械手广泛地应用与锻压、冲压、锻造、焊接、装配、搬运、喷漆、热处理等各个行业。特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。 本设计描述了基于PLC的机械手控制系统设计,重点介绍了机械手控制系统中的硬件选择方法,软件的设计过程,以及PLC控制装置的工作过程。 本设计实现了机械手在搬运装配线上,通过S7-200PLC控制机械手完成从A传送带搬运物件至B传送带中,然后进入下一个工作流程。机械手的上升/下降和左转/右转的执行,分别由双线圈二位电磁阀控制气缸的运动实现;夹紧/放松则是由单线圈的二位电磁阀控制气缸的运动来实现。 【关键词】机械手;PLC;电磁阀
Based on plc industrial manipulator control system design Abstract In the field of industrial automation manipulator is often met in a control object. In recent years, with the development of industrial automation manipulator gradually become a new subject, and with the rapid development. Manipulator widely application and forging, stamping, forging, welding, assembling, handling, spray paint, heat treatment, etc. Especially in heavy, high temperature, toxic and dangerous, radioactive, dust and so on bad work environment, manipulator because of its significant advantages by pay special attention to. In a word, the manipulator is to improve the labor productivity, improve working conditions, reduce labor intensity and realize industrial production automation is an important means. This design based on PLC describes the manipulator control system design, introduced the manipulator control system, the hardware selection method, the software design process, and the working process of the PLC control device. The design and implementation of the manipulator in the handling assembly line, manipulator controlled by the S7-200PLC complete conveyor belt carrying objects from A to B conveyor, and then go to the next workflow. The implementation of the up / down and left / right of the manipulator, respectively, to achieve control movement of the cylinder by a double coil solenoid valve; clamp / unclamp cylinder is controlled by a single coil solenoid valve movement. 【Key Words】Manipulator;PLC;solenoid valve
用三菱FX2N PLC实现机械手的顺序控制
用三菱FX2N PLC实现机械手的顺序控制 一、训练内容 1、项目描述 如图10-7所示是一气动机械手动作示意图,其功能是将工件从A处移送到B处。气动机械手的升降和左右移行分别使用了双线圈的电磁阀,在某方向的驱动线圈失电时能保持在原位,必须驱动反方向的线圈才能反向运动。上升、下降对应的电磁阀线圈分别是YV2、YV1,右行、左行对应的电磁阀线圈分别是YV3、YV4。机械手的夹钳使用单线圈电磁阀YV5,线圈通电时夹紧工件,断电时松开工件。通过设置限位开关SQ1 、SQ2、SQ3、SQ4分别对机械手的下降、上升、右行、左行进行限位,而夹钳不带限位开关,它是通过延时1.7s来表示夹紧、松开动作的完成的。 如图10-8所示为机械手的操作面板,机械手能实现手动、回原位、单步、单周期和连续等五种工作方式。手动工作方式时,用各按钮的点动实现相应的动作;回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;单步工作方式时,每按一次起动按钮,机械手向前执行一步;选择单周期工作方式时,每按一次起动按钮,机械手只运行一个周期就停下;连续工作方式时,机械手在原位,只要按下起动按钮,机械手就会连续循环动作,直到按下停止按钮,机械手才会最后运行
到原位并停下;而在传送工件的过程中,机械手必须升到最高位置才能左右移动,以防止机械手在较低位置运行时碰到其它工件。 2、实训要求 2.1 分配输入/输出点 见表10-4。 表10-4 PLC输入/输出点分配表 2.2 PLC接线图 如图10-9所示。
2.3程序设计 2.3.1 基本指令编程 机械手系统的程序总体结构如图10-10所示,分为公用程序、自动程序、手动程序和回原位程序等四部分。其中自动程序包括单步、单周期和连续运行的程序,因它们的工作顺序相同,所以可
基于plc的机械手控制系统设计(毕业设计)
Xinyu University 毕业设计(论文) 基于PLC的机械手控制系统设计 学生姓名:何友良 学号:1201231016 专业:电气工程及其自动化 指导教师:谢富珍副教授 学院:电气与电子工程 江西·新余
独创性声明 本人郑重声明: 所呈交的毕业设计(论文)是本人在指导教师指导下进行的研究工作及取得的研究成果。其中除加以标注和致谢的地方,以及法律规定允许的之外,不包含其他人已经发表或撰写完成并以某种方式公开过的研究成果,也不包含为获得其他教育机构的学位或证书而作的材料。其他同志对本研究所做的任何贡献均已在文中作了明确的说明并表示谢意。 本毕业设计(论文)成果是本人在新余学院期间在指导教师指导下取得的,成果归新余学院所有。 特此声明。 作者签名(手写):签名日期:年月日 版权使用授权书 本毕业设计(论文)作者及指导教师完全了解新余学院有关保留、使用毕业设计(论文)的规定,有权保留并向国家有关部门或机构送交毕业设计(论文)的复印件和磁盘,允许毕业设计(论文)被查阅和借阅。 作者签名(手写):指导教师签名(手写): 日期:年月日日期:年月日
摘要 论文题目:基于PLC的机械手控制系统设计 专业:电气工程及其自动化 学生姓名:何友良 指导教师:谢富珍副教授 摘要 随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。工人工作环境和工作内容也要求理想化简单化,对于一些往复的工作由机械手远程控制或自动完成显得非常重要。这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。 在机械制造业中,机械手应用较多,发展较快。目前主要应用于机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。 本文主要论述了基于PLC设计的机械手控制系统。首先,对可能用到的可编程控制器进行了相关的介绍,再选择设计所用到的PLC型号。然后,通过对机械手的控制方式及各功能的实现方式进行研究,确定各功能的实现方案和设计控制系统所用到的器材。最后,对PLC控制系统的软件程序和硬件结构进行设计。 关键词:工业自动化;可编程控制器;机械手;远程控制;传感反馈
机械手的PLC控制设计及调试
目录 摘要 (2) ABSTRACET (3) 引言 (5) 1 PLC的发展历程和构成 (7) 1.1 PLC的发展史 (7) 1.2 PLC的构成 (8) 1.3 CPU的构成 (8) 1.4 I.O模块 (8) 1.5 电源模块 (9) 1.6 底版和机架 (9) 1.7 PLC系统的其他设备 (9) 2 机械手的组成 (10) 2.1 机械手的发展 (10) 2.2 动力臂的机械构造 (10) 2.3 控制和动力臂的机械构造 (11) 2.4 位置控制系统 (11) 2.5 负载反传系统 (11) 3 机械手PLC的发展历程和构成 (12) 3.1 根据工艺过程分析控制要求 (12) 3.2 确定所需的用户输入/输出设备及I/O点数 (15) 3.3 PLC的选择 (18) 3.4 分配PLCI/O点的编号(定义号) (18) 3.5 PLC程序设计 (18) 4 英文资料 (30) 个人小结 (35) 参考文献 (46)
机械手的PLC控制设计及调试 摘要 机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手 关键词:点控制机械手连续控制机械手可编程控制技术