用单片机实现以太网卡通信的设计

用单片机实现以太网卡通信的设计
尚晨旭,邢化锋,柴 燕,高 静
(大连海事大学科学会馆自动化所,辽宁省大连市100044)
【摘 要】 介绍了基于51单片机的以太网卡硬件接口电路的设计和网卡驱动程序的开发。该设计是实现RS 2232串口数据格式和以太网协议格式的数据转换。核心处理器采用AT89C51单片机,以太网卡控制芯片采用RT L8019as 芯片将TCP /I P 协议栈嵌入到单片机中。讨论了T CP /I P 协议族的分层实现,并根据应用的需要将单片机中的T CP /I P 协议进行简化,实现网络通信。
关键词:以太网,RT L8019AS,T CP /I P 协议,单片机中图分类号:TP393.03
收稿日期:2005209207;修回日期:2005209230。
0 引 言
在网络与计算机技术的发展、普及,以及电子设备
日趋网络化的背景下,用单片机控制以太网卡进行数据通信成为当前的主要发展趋势。通过单片机控制以太网卡编程可实现局域网内任意两个终端的通信。
本文所介绍的以太网卡设计主要应用于工业现场控制领域的数据采集和数据传输方面。简要介绍基于AT89C51单片机和RT L8019AS 以太网控制芯片所设计的网卡的硬件电路结构框图及软件程序流程设计。
1 系统硬件结构设计
系统的硬件电路结构如图1所示。主要包括MCU 、串口通信,EEPROM 和网卡芯片等单元
。
图1 系统硬件框图
采用AT89C51单片机作为主处理器控制以太网卡芯片来实现与以太网的数据交换。由于单片机内存资源小、处理速度慢,需外扩RAM 。使用外扩RAM 可以提高单片机的数据传输速度,以及处理复杂的T CP /I P 协议。以太网数据包最大可以达到1500多字节,AT89C51单片机无法存储这么大的包,只有放到外部RAM 进行存储。同时,外部RAM 也用做串行口的输
入输出缓冲,以使单片机可以高速传输数据。
在系统中还使用x5045作为外部扩展的EEP 2
ROM ,用来存储I P 地址、物理地址以及网卡的其他配
置信息。同时x5045还具有电压监控、看门狗定时器、
上电复位3种功能,使用x5045监控系统的运行过程,当系统不稳定时可以进行有效的复位。
由于单片机的高低电平与串行口的高低电平不同,二者之间需要进行电平转换,在本设计中使用MAX232作为串口电平转换芯片,负责单片机与PC 机的电平转换。数据可从串口输入到单片机,单片机把数据送到RT L8019AS 后传出。反之,从RT L8019AS 接收到的数据通过单片机可从串口发出。
网卡芯片采用Realtek 公司生产的RT L8019AS 以太网卡控制器,价格低廉,与NE2000兼容。RT L8019AS 符合ETHERNET Ⅱ和I EEE 802.3标准;内置16kB SRAM ,用于收发缓冲,降低对主处理器的要求;支持8/16位数据总线、8个中断申请、16个I/O 基地址选择等许多特性,在本设计中选用8位数据总线。选择8位数据总线的方法是在RT L8019AS 的
I O CS16B 引脚接一个27k
Ω的下拉电阻。由于网卡控制器与以太网是不能直接相连的,中间要通过网络隔离滤波器才能连接到以太网上。网络隔离变压器的作用是隔直通交,避免双绞线上的直流电平干扰芯片RT L8019AS 的工作点;同时,利用变压器自身的通频带限制高频干扰。
RT L8019AS 提供3种配置I/O 端口和中断的模式:第1种为跳线模式(Jumper ),RT L8019AS 的I/O 端口和中断由跳线引脚决定;第2种为即插即用模式(Plug and Play,PnP ),由软件自动配置;第3种为免跳线模式(Jumperless ),RT L8019AS 的I/O 端口和中断由9346(EEPROM )中的配置信息决定。本电路中,未使用9346而是使用x5045作为闪盘存储MAC 地址和其他配置信息。PnP 模式主要使用在PC 机中。所以,使用跳线模式选择I/O 端口和中断。RT L 8019AS 的
?
35?第32卷第2期2006年2月 电子工程师 E LECTRON I C E NGI N EER Vol
.32No .2
Feb .2006
65引脚JP 接高电平(直接接到VDD 或者通过一个
10k
Ω的电阻上拉),RT L 8019AS 工作在跳线模式。I/O 端口基址选为300H,中断使用I RQ 2/9引脚。
当系统上电复位后,在RST DRV 下降沿,RT L8019AS 读入各个跳线引脚的状态,写入到系统配置寄存器中,作为系统默认的初始配置。
2 系统软件实现
以太网通信软件的设计包括以太网卡控制器的驱动程序设计和上层协议软件设计。驱动程序设计有网卡芯片初始化和收发数据包程序。上层软件主要是实现TCP /I P 协议,由于单片机自身资源有限,它的存储容量、处理速度和总线宽度等都不能像PC 机那样采用标准的TCP /I P 协议,但可以根据系统的特点和功能,将精简的T CP /I P 协议嵌入到单片机中。2.1 网卡初始化和收发数据包程序设计
首先对RT L8019AS 进行复位。当系统复位完成后,要对网卡的工作参数进行设置,即对网卡初始化,网卡的工作参数可通过对RT L8019AS 内部寄存器设置。RT L8019AS 内部寄存器有4页,与NE2000兼容的有3页,第4页不用。页选择由CR 寄存器的PS1,PS0位确定。在0页寄存器中可以设置接收、发送状态配置以及发送缓存区的起始页与接收缓存区起、止页地址等寄存器;在1页寄存器中可以设置以太网接口的MAC 地址和多播地址。
RT L8019AS 内部有两块RAM 区。一块16k B ,地址为0x4000~0x7fff;RAM 按页存储,每256字节为一页。将RAM 的前12页(即0x4000~0x4bff )存储区作为发送缓冲区;后52页(即0x4c00~0x7fff )存储区作为接收缓冲区,用来存放接收的以太网帧。另一块RAM 只有32字节,地址为0x0000~0x001f,用于存储以太网物理地址。
接收和发送数据包都必须通过DMA 读写网卡内部的16kB RAM ,该RAM 是一个双端口RAM 。所谓双端口,就是有两套总线连接到该RAM 上:一套总线是单片机读写网卡上的RAM ,即远程DMA;另一套总线是网卡控制器读写网上的RAM ,即本地DMA 。
接收数据是通过本地DMA 从网卡接口接收,RT L8019AS 对接收到的数据包通过MAC 比较、CRC
校验,由F I F O 存到接受缓冲区,收满一帧后以中断或
者寄存器标志方式通知主处理器,主处理器通过远程DMA 将缓冲区的数据读到自己的内存中进行处理。
数据包的发送过程包括3个步骤:主处理器将数据包按照RT L8019AS 发送数据帧格式进行封装;封装完后通过远程DMA 通道将数据包送到RT L8019AS 的发送缓冲区;然后通过本地DMA 将数据送到F I F O,通
过设置寄存器CR 启动发送。RT L8019AS 完成上一帧的发送,再开始下一帧的发送。2.2 上层软件设计
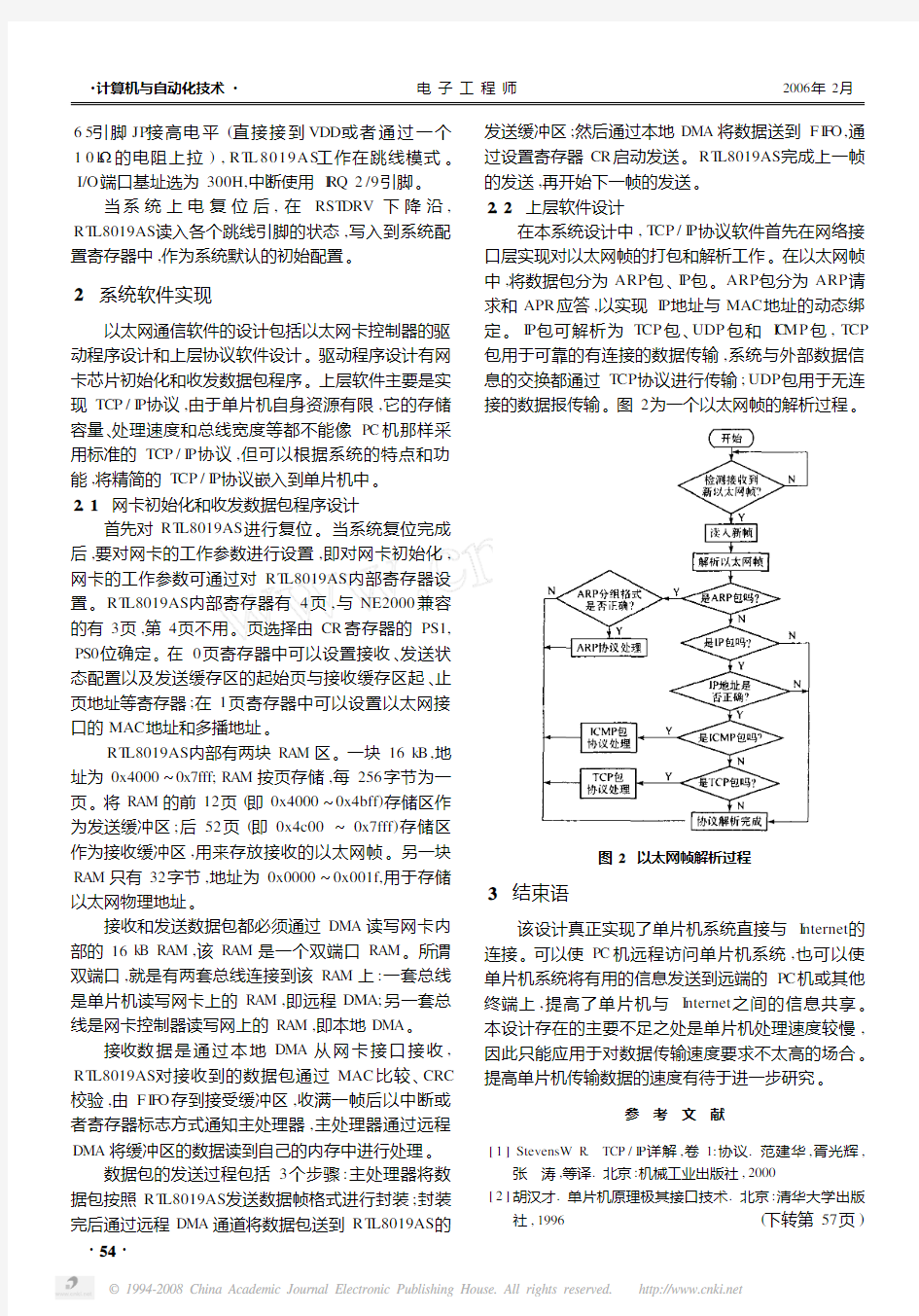
在本系统设计中,T CP /I P 协议软件首先在网络接口层实现对以太网帧的打包和解析工作。在以太网帧中,将数据包分为ARP 包、I P 包。ARP 包分为ARP 请求和APR 应答,以实现I P 地址与MAC 地址的动态绑定。I P 包可解析为T CP 包、UDP 包和I C MP 包,T CP 包用于可靠的有连接的数据传输,系统与外部数据信息的交换都通过T CP 协议进行传输;UDP 包用于无连接的数据报传输。图2为一个以太网帧的解析过程
。
图2 以太网帧解析过程
3 结束语
该设计真正实现了单片机系统直接与I nternet 的
连接。可以使PC 机远程访问单片机系统,也可以使单片机系统将有用的信息发送到远端的PC 机或其他终端上,提高了单片机与I nternet 之间的信息共享。本设计存在的主要不足之处是单片机处理速度较慢,因此只能应用于对数据传输速度要求不太高的场合。提高单片机传输数据的速度有待于进一步研究。
参 考 文 献
[1]StevensW R.TCP /I P 详解,卷1:协议.范建华,胥光辉,
张 涛,等译.北京:机械工业出版社,2000
[2]胡汉才.单片机原理极其接口技术.北京:清华大学出版
社,1996
(下转第57页)
?
45??计算机与自动化技术?电子工程师2006年2月
输出与功率接口之间加入光电耦合器,可以消除电机
与控制器的电耦合,从而抑制干扰。
该伺服系统的工作原理是:根据主控机发送的位置信号,微处理器按光电码盘给出的反馈脉冲信号计算位置偏差;再由纯软方法实现位置、速度和电流的全数字化闭环控制,产生P WM 信号;最后由P WM 功率开关接口对电机进行最终的功率驱动。由于闭环控制是通过软件实现的,可以根据实际情况调整控制参数,求得最佳匹配。还可通过微处理器补偿使传感器精度得以提高。
基于T MS320LF2407的全数字化伺服系统,一个重要的特点就是结构简单,大部分外围电路集成在DSP 芯片上,因而可靠性高。系统采用位置、速度和电
流这3环控制,保证了电机的快速精确定位,也保证了
系统的稳定性,并且3环的全数字化控制有利于控制参数的调整,达到最优控制。因此,该伺服系统能满足跟踪扫瞄系统的快速、高精度、高稳定性的要求。
4 结束语
本文介绍了粗精复合控制跟踪扫瞄系统的结构和
工作过程,设计了基于CAN 总线的控制系统。以T MS320LF2407作为智能节点的控制器对电机进行快速、精准定位。采用CAN 总线结构,使主控机对所有电机的运行状态进行实时、统一监测和管理。通过协调各电机的运行,跟踪扫瞄系统能快速、精确、稳定地跟踪和瞄准运动目标。
参 考 文 献
[1]邬宽明.CAN 总线原理和应用系统设计.北京:北京航空
航天大学出版社,1996
[2]刘和平,等.T MS320LF240x DSP C 语言开发应用.北京:
北京航空航天大学出版社,2003
[3]李仁定.电机的微机控制.北京:机械工业出版社,1999
The Appli cati on of CAN i n Tracki n g and A i m i n g Syste m Based
on Coarse 2fi n e Co mposite Control
Tu Za i m a i ,J i a J i a nyuan,W ang W e i dong (Xidian University,Xi ’an 710071,China )
【Abstract 】 A phot oelectrical tracking and ai m ing syste m based on coarse 2fine composite contr ol is a
syste m which owns high s peed,high p recisi on and high stability .A ls o it can realize the target tracking at large range .I n this paper .The funda mental p rinci p le,main structure and the working 2p r ocess,is intr oduced .A contr ol sche me based on CAN bus is p r oposed .A CAN 2bus f or the contr ol sche me and a node contr ol l oop are p r oposed .T MS320LF2407DSP is used as the node contr oller .
Keywords:coarse 2fine composite contr ol,CAN bus,T MS320LF2407
(上接第54页)
Desi gn of Ethernet Card Co mmun i cati on Based
on Si n gle Chi p M i croco mputer
Shang Chenxu,X i n g Huafeng,Chan Yan,Gao J i n g (Dalian Mariti m e University,Dalian 116026,China )
【Abstract 】 This paper intr oduces the design of interface hardware circuit and s oft driver of Ethernet card based on a single chi p m icr ocomputer .The design realizes conversi on of 232data p r ot ocol and Ethernet p r ot ocol .W e use AT89C51as CP U and RT L8019AS as Ethernet contr ol chi p.Then we discuse the realizati on of si m p lificati on of TCP /I P in single chi p.
Keywords:ethernet,RT L8019AS,T CP /I P,single chi p m icr ocomputer
?
75?第32卷第2期涂再买,等:C AN 总线在粗精复合控制跟踪扫瞄系统中的应用?计算机与自动化技术?
单片机双机之间的串行通信设计
专业方向课程设计报告 题目:单片机双机之间的串行通信设计
单片机双机之间的串行通信设计 一.设计要求: 两片单片机利用串行口进行串行通信:串行通信的波特率可从键盘进行设定,可选的波特率为1200、2400、4800和9600bit/s。 二、方案论证: 方案一:以两片51单片机作为通信部件,以4*4矩阵键盘作为数据输入接口,通过16个不同键值输入不同的信息,按照51单片机的方式3进行串口通信,从机采用中断
方式接收信息并按照通信协议改变波特率或者用I/O口输出、CD4511译码、数码管显示相关数据,整个系统的软件部分采用C语言编写。 方案二:整个系统的硬件设计与方案一样,但是通信方式采用方式一进行通信,主从机之间的访问采用查询方式,数据输出直接由单片机的译码程序输出译码数据,同时软件编写采用汇编语言。 两种方式从设计上来说各有特色,而且两种方式都应该是可行的。方案一中按照方式三通信可以输出九位数据而方式一只能输出八位数据,但就本题的要求来说方式一就可以了。主从机之间的交流采用中断方式是一种高效且保护单片机的选择,但是相比之下本人对查询方式的理解更好一些。数码管的显示若采用CD4511译码则直接输出数据就可以了,但是这样会增加硬件陈本,而且单片机的资源大部分都还闲置着,所以直接编写一段译码程序是比较好的做法。另外在软件编写上,采用C语言在后续设计中对硬件的考虑稍少一些,换言之采用汇编可以使自己对整个通信过程及单片机的部分结构有更清晰地认识所以综合考虑采用方案二。 三、理论设计: 采用AltiumDesigner绘制的原理图(整图)
本系统主要包括五个基本模块:单片机最小系统(包括晶振电路、电源、复位电路及相关设置电路)、4*4矩阵键盘、功能控制电路、数据显示电路、波特率更改指示电路。 本设计的基本思路是通过控制口选择将要实现的功能,然后矩阵键盘输入数据,单片机对数据进行处理(加校验码、设置功能标志位),然后与从机握手,一切就绪之后后就开始发送数据,然后从机对接收数据校验,回发校验结果,主机根据校验结果进行下一步动作,或者重发,或者进入下一 数据的发送过程,然后按照此过程不段循环,直到结束。 晶振电路提供脉冲,加上复位电路,将 EA接入高电电平选择片内程序存储器。 这是一个单片机能够工作的最低设置。
两个单片机之间的串行通信
两个单片机之间的串行通信 一、设计要求 在某个控制系统中有U1、U2这两个单片机,U1单片机首先将P1端口指拨开关数据载入SBUF,然后经由TXD将数据传送给U2单片机,U2单片机将接收数据存入SBUF,再由SBUF载入累加器,并输出至P1端口,点亮相应端口的LED。 二、实验所需元器件 三、电路原理图: 两个单片机之间的串行通信电路图
四、程序设计 这两个单片机均工作在半工状态,U1将P1端口的状态通过TXD发半空给U2,而U2接收U1的数据,然后控制P1端口的LED显示。因此,需编写两个不同的程序,其程序流程图如下所示:
五、C语言程序: U1的C语言程序: #include "reg51.h" #define uint unsigned int #define uchar unsigned char void send(uchar state) { SBUF=state; while(TI==0); TI=0; } void SCON_init(void) { SCON=0x50; TMOD=0x20; PCON=0x00; TH1=0xfd; TL1=0xfd; TI=0; TR1=1; ES=1; } void main() { P1=0xff; SCON_init(); while(1) { send(P1); } } U2的C语言程序: #include "reg51.h" #define uint unsigned int #define uchar unsigned char uchar state; void receive() { while(RI==0) state=SBUF; RI=0; } void SCON_init(void) { SCON=0x50; TMOD=0x20; PCON=0x00; TH1=0xfd; TL1=0xfd; RI=0; TR1=1; } void main() { SCON_init(); while(1) { receive(); P1=state; } } 六、调试与仿真:
51单片机和计算机之间实现串口通信的电路图
51单片机和计算机之间实现串口通信的电路图 串口通讯参考程序如下: 来源:深入浅出AVR单片机 #include
基于单片机的串口通信模块设计
1 绪论 1.1 研究背景 通信是指不同的独立系统利用线路互相交换数据,它的主要目的是将数据从一端传送到另一端,实现数据的交换。在现代工业控制中,通常采用计算机作为上位机与下层的实时控制与监测设备进行通讯。现场数据必须通过一个数据收集器传给上位机,同样上位机向现场设备发命令也必须通过数据收集器。串行通信因其结构简单、执行速度快、抗干扰能力强等优点,已被广泛应用于数据采集和过程控制等领域。 计算机与外界的信息交换称为通信。基本的通信方式有并行通信和串行通信两种。串行通信是指一条信息额各位数据被逐位按顺序传送的通信方式。串行通信的特点是:数据位传送,按位顺序进行,最少只需要一根传输线即可完成,成本低但传送速度快,串行通信的距离可以从几米到几千米。 随着计算机技术尤其是单片微型机技术的发展,人们已越来越多地采用单片机来对一些工业控制系统中如温度、流量和压力等参数进行监测和控制。PC机具有强大的监控和管理能力,而单片机则具有快速及灵和的控制特点,通过PC 机的RS-232串行接口与外部设备进行通信,是许多测控系统中常用的一种通信解决方案。而随着USB接口技术的成熟和使用的普及,由于USB 接口有着 RS-232(DB-9)串口无法比拟的优点,RS-232(DB-9)串口正在逐步地为USB 接口所替代。而在现在的大多数笔记本电脑中,出于节省物理空间和用处不大等原因,RS-232(DB-9)串口已不再设置,这就约束了基于RS-232(DB-9)串口与PC 机联络的单片机设备的使用围。当前USB接口逐步取代RS-232(DB-9)串口已是大势所趋,单片机同计算机的USB通信在实际工作中的应用围也将越来越广。本文所介
51单片机串口通信,232通信,485通信,程序
51单片机串口通信,232通信,485通信,程序代码1:232通信 #include
while(1) { if(flag==1) { ES=0; for(i=0;i<6;i++) { SBUF=table[i]; while(!TI); TI=0; } SBUF=a; while(!TI); TI=0; ES=1; flag=0; } } } void ser() interrupt 4 {
RI=0; a=SBUF; flag=1; } 代码2:485通信 #include
} void main() { init_1602(); init(); while(1) { if(flag==1) { display(0,a); } } } void ser() interrupt 4 { RI=0; a=SBUF; flag=1; } Love is not a maybe thing. You know when you love someone.
汇编语言实现串口通信(PC和单片机间)资料
8.用C语言或汇编语言实现串口通信(PC和单片机间) 上位机和下位机的主从工作方式为工业控制及自动控制系统所采用。由于PC 机分析能力强、处理速度更快及单片机使用灵活方便等特点,所以一般都将PC 机作为上位机,单片机作为下位机,二者通过RS-232或者RS-485接收、发送数据和传送指令。单片机可单独处理数据和控制任务,同时也将数据传送给PC机,由PC机对这些数据进行处理或显示 1 硬件电路的设计 MCS-51单片机有一个全双工的串行通讯口UART,利用其RXD和TXD与外界进行通信,其内部有2个物理上完全独立的接收、发送缓冲器SBUF,可同时发送和接收数据。所以单片机和PC机之间可以方便地进行串口通讯。单片机串口有3条引线:TXD(发送数据),RXD(接收数据)和GND(信号地)。因此在通信距离较短时可采用零MODEM方式,简单三连线结构。IBM-PC机有两个标准的RS-232串行口,其电平采用的是EIA电平,而MCS-51单片机的串行通信是由TXD(发送数据)和RXD(接收数据)来进行全双工通信的,它们的电平是TTL电平;为了PC机与MCS-51 机之间能可靠地进行串行通信,需要用电平转换芯片,可以采用MAXIM公司生产的专用芯片MAX232进行转换。电路如图1所示。硬件连接时,可从MAX232中的2路发送器和接收器中任选一路,只要注意发送与接收的引脚对应关系即可。接口电路如图3.5所示。
总体设计按照整体设计思路方案绘制原理图如下所示: 2 系统软件设计 软件设计分上位机软件设计和下位机软件设计。这两部分虽然在不同的机器上编写和运行,但它们要做的工作是对应的:一个发送,另一个接收。为了保证数据通信的可靠性,要制定通信协议,然后各自根据协议分别编制程序。现约定通信协议如下:PC机和单片机都可以发送和接收。上位机和下位机均采用查询方式发送控字符和数据、中断方式接收控制字符和数据。采用RS-232串口异步通信, 1上位PC机与下位单片机异步串行通信的通信协议
单片机与PC机串口通讯设计
第一章串口通讯的系统组成与原理 1.1 系统组成及通讯原理 1.1.1 系统构成 一、MSP430F149功能简介: 本设计选用的主要芯片为MSP430F149,该单片机属于德州仪器公司MSP430F14X/16X FLASH 系列。该系列是一组工业级超低功耗的微控制器,运行环境温度为-40~+85 摄氏度工作电压范围 1.8~3.6V,MSP430 单片机之所以有超低的功耗,是因为其在降低芯片的电源电压及灵活而可控的运行时钟方面都有其独到之处。由于具有16位RISC(精简指令集)结构,16位寄存器和常数寄存器,MSP430 达到了最大的代码效率。数字控制的振荡器提供快速从所有低功耗模式苏醒到活动模式的能力时间少于6ms。MSP430F149有较高的处理速度,在8MHz 晶体驱动下指令周期为125 ns。另外它带有两个16 位定时器(带看门狗功能)、速度极快的8 通道12 位A/D 转换器(ADC)(带内部参考电压、采样保持和自动扫描功能)、一个内部比较器和两个通用同步/异步发射接收器、48个I/O口(均可独立控制)的微处理器结构。硬件乘法器提高了单片机的性能并使单片机在编码和硬件上可兼容[3]。这些特点保证了可编制出高效率的源程序。 二、系统构成 1、系统框图 系统构成如图1-1所示,由上位机(即工业控制计算机)、通讯接口和下位机3部分组成。上位机选用的是工控机,智能终端由单片机MSP430F149和外围传感器放大电路等构成(本设计部涉及该部分的设计)。单片机与PC 机之间通信方式为串行异步方式(UART),下位机采用中断方式进行与上位机的数据交换,上位机采用按时查询方式对各串口进行读写操作。单片机MSP430要想与PC 串口连接或者其它带有串口的终端设备连接,接口电路部分必须要进行EIA-RS-232-C 与MSP430 电平和逻辑关系的转换[4]。本设计将采用MAX3221芯片,完成3V~5V 电平与串口电平的双向转换。
第06章单片机串行通信系统习题解答
第6章单片机串行通信系统习题解答 一、填空题 1.在串行通信中,把每秒中传送的二进制数的位数叫波特率。 2.当SCON中的M0M1=10时,表示串口工作于方式 2 ,波特率为 fosc/32或fosc/64 。 3.SCON中的REN=1表示允许接收。 4.PCON 中的SMOD=1表示波特率翻倍。 5.SCON中的TI=1表示串行口发送中断请求。 6.MCS-51单片机串行通信时,先发送低位,后发送高位。 7.MCS-51单片机方式2串行通信时,一帧信息位数为 11 位。 8.设T1工作于定时方式2,作波特率发生器,时钟频率为,SMOD=0,波特率为时,T1的初值为 FAH 。 9.MCS-51单片机串行通信时,通常用指令 MOV SBUF,A 启动串行发送。 10.MCS-51单片机串行方式0通信时,数据从引脚发送/接收。 二、简答题 1.串行口设有几个控制寄存器它们的作用是什么 答:串行口设有2个控制寄存器,串行控制寄存器SCON和电源控制寄存器PCON。其中PCON中只有的SMOD与串行口的波特率有关。在SCON中各位的作用见下表: 2.MCS-51单片机串行口有几种工作方式各自的特点是什么 答:有4种工作方式。各自的特点为:
3.MCS-51单片机串行口各种工作方式的波特率如何设置,怎样计算定时器的初值 答:串行口各种工作方式的波特率设置: 工作方式O :波特率固定不变,它与系统的振荡频率fosc 的大小有关,其值为fosc/12。 工作方式1和方式3:波特率是可变的,波特率=(2SMOD/32)×定时器T1的溢出率 工作方式2:波特率有两种固定值。 当SM0D=1时,波特率=(2SM0D/64)×fosc=fosc/32 当SM0D=0时,波特率=(2SM0D/64)×fosc=fosc/64 计算定时器的初值计算: 4.若fosc = 6MHz ,波特率为2400波特,设SMOD =1,则定时/计数器T1的计数初值为多少并进行初始化编程。 答:根据公式 N=256-2SMOD ×fosc /(2400×32×12)= ≈243 =F3H TXDA: MOV TMOD,#20H ;置T1定时器工作方式2 MOV TL1,#0F3H ;置T1计数初值. MOV TH1,#0F3H B f B f N OSC SMOD OSC SMOD ??-=???-=384225612322256
基于51单片机的双机串行通信
机电高等专科学校2015-2016学年第1学期通信实训报告 系别:电子通信工程系 班级: xxxxxx 学号: 13xxxxxxxxx : xxxxxxx 2015年12月
基于51单片机的双机串行通信 摘要:串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。在通信过程中,使用通信协议进行通信。 关键字:通信双机 一、总体设计 1设计目的 1.通过设计相关模块充分熟悉51单片机的最小系统的组成和原理; 2.通过软件仿真熟悉keil和proteus的配合使用; 3.通过软件编程熟悉51的C51编程规; 4.通过实际的硬件电路搭设提高实际动手能力。 2.设计要求: 两片单片机之间进行串行通信,A机将0x06发送给B机,在B机的数码管上静态显示1,B机将0~f动态循环发送到A机,并在其数码管上显示。 3.设计方案: 软件部分,通过通信协议进行发送接收,A机先送0x06(B机数码管显示1)给B机(B机静态显示),当从机接收到后,向B机发送代表0-f的数码管编码数组。B收到0x06后就把数码表TAB[16]中的数据送给从机。 二、硬件设计 1.51单片机串行通信功能 计算机与外界的信息交换称为通信,常用的通信方式有两种:并行通信和串行通信。51单片机用4个接口与外界进行数据输入与数据输出就是并行通信,并行通信的特点是传输信号的速度快,但所用的信号线较多,成本高,传输的距离较近。串行通信的特点是只用两条信号线(一条信号线,再加一条地线作为信号回路)即可完成通信,成本低,传输的距离较远。 51单片机的串行接口是一个全双工的接口,它可以作为UART(通用异步接受和发送器)用,也可以作为同步移位寄存器用。51单片机串行接口的结构如下:
51单片机实现的485通讯程序
51单片机实现的485通讯程序 #ifndef __485_C__ #define __485_C__ #include
void get_status(); // 调用该函数获得设备状态信息,函数代码未给出 void send_data(uchar type, uchar len, uchar *buf); // 发送数据帧 bit recv_cmd(uchar *type); // 接收主机命令,主机请求仅包含命令信息 void send_byte(uchar da); // 该函数发送一帧数据中的一个字节,由send_data()函数调用void main() { uchar type; uchar len; /* 系统初始化*/ P1 = 0xff; // 读取本机设备号 dev = (P1>>2); TMOD = 0x20; // 定时器T1使用工作方式2 TH1 = 250; // 设置初值 TL1 = 250; TR1 = 1; // 开始计时 PCON = 0x80; // SMOD = 1 SCON = 0x50; // 工作方式1,波特率9600bps,允许接收 ES = 0; // 关闭串口中断 IT0 = 0; // 外部中断0使用电平触发模式 EX0 = 1; // 开启外部中断0
RS-232实现单片机与PC间的串行通信
内容提要 单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。相当于一个微型的计算机,和计算机相比,单片机只缺少了I/O设备。概括的讲:一块芯片就成了一台计算机。它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。同时,学习使用单片机是了解计算机原理与结构的最佳选择。 单片机内部也用和电脑功能类似的模块,比如CPU,内存,并行总线,还有和硬盘作用相同的存储器件,不同的是它的这些部件性能都相对我们的家用电脑弱很多,不过价钱也是低的,一般不超过10元即可......用它来做一些控制电器一类不是很复杂的工作足矣了。我们现在用的全自动滚筒洗衣机、排烟罩、VCD 等等的家电里面都可以看到它的身影!......它主要是作为控制部分的核心部件。它是一种在线式实时控制计算机,在线式就是现场控制,需要的是有较强的抗干扰能力,较低的成本,这也是和离线式计算机的(比如家用PC)的主要区别。单片机是靠程序运行的,并且可以修改。通过不同的程序实现不同的功能,尤其是特殊的独特的一些功能,这是别的器件需要费很大力气才能做到的,有些则是花大力气也很难做到的。一个不是很复杂的功能要是用美国50年代开发的74系列,或者60年代的CD4000系列这些纯硬件来搞定的话,电路一定是一块大PCB板!但是如果要是用美国70年代成功投放市场的系列单片机,结果就会有天壤之别!只因为单片机的通过你编写的程序可以实现高智能,高效率,以及高可靠性! 由于单片机对成本是敏感的,所以目前占统治地位的软件还是最低级汇编语言,它是除了二进制机器码以上最低级的语言了,既然这么低级为什么还要用呢?很多高级的语言已经达到了可视化编程的水平为什么不用呢?原因很简单,就是单片机没有家用计算机那样的CPU,也没有像硬盘那样的海量存储设备。一个可视化高级语言编写的小程序里面即使只有一个按钮,也会达到几十K的尺
单片机双机之间的串行通信设计
单片机双机之间的串行通 信设计 Prepared on 24 November 2020
专业方向课程设计报告题目:单片机双机之间的串行通信设计单片机双机之间的串行通信设计 一.设计要求: 两片单片机利用串行口进行串行通信:串行通信的波特率可从键盘进行设定,可选的波特率为1200、2400、4800和9600bit/s。 二、方案论证: 方案一:以两片51单片机作为通信部件,以4*4矩阵键盘作为数据输入接口,通过16个不同键值输入不同的信息,按照51单片机的方式3进行串口通信,从机采用中断方式接收信息并按照通信协议改变波特率或者用I/O口输出、CD4511译码、数码管显示相关数据,整个系统的软件部分采用C语言编写。 方案二:整个系统的硬件设计与方案一样,但是通信方式采用方式一进行通信,主从机之间的访问采用查询方式,数据输出直接由单片机的译码程序输出译码数据,同时软件编写采用汇编语言。 两种方式从设计上来说各有特色,而且两种方式都应该是可行的。方案一中按照方式三通信可以输出九位数据而方式一只能输出八位数据,但就本题的要求来说方式一就可以了。主从机之间的交流采用中断方式是一种高效且保护
单片机的选择,但是相比之下本人对查询方式的理解更好一些。数码管的显示若采用CD4511译码则直接输出数据就可以了,但是这样会增加硬件陈本,而且单片机的资源大部分都还闲置着,所以直接编写一段译码程序是比较好的做法。另外在软件编写上,采用C语言在后续设计中对硬件的考虑稍少一些,换言之采用汇编可以使自己对整个通信过程及单片机的部分结构有更清晰地认识所以综合考虑采用方案二。 三、理论设计: 采用AltiumDesigner绘制的原理图(整图) 本系统主要包括五个基本模块:单片机最小系统(包括晶振电路、电源、复位电路及相关设置电路)、4*4矩阵键盘、功能控制电路、数据显示电路、波特率更改指示电路。 本设计的基本思路是通过控制口选择将要实现的功能,然后矩阵键盘输入数据,单片机对数据进行处理(加校验码、设置功能标志位),然后与从机握手,一切就绪之后后就开始发送数据,然后从机对接收数据校验,回发校验结果,主机根据校验结果进行下一步动作,或者重发,或者进入下一数据的发送过程,然后按照此过程不段循环,直到结束。 单片机最小系统:接上电源和地,
单片机串口通信C程序及应用实例
一、程序代码 #include
TI = 0; } T_counter = 0; } uart_receive(void) interrupt 4 { if(RI) { RI = 0; indata[R_counter] = SBUF; R_counter++; if(R_counter>=4) { R_counter = 0; flag = 1; } } } void system_initial(void) { P1M1 = 0x00; P1M0 = 0xff; P1 = 0xff; //初始化为全部关闭 temp3 = 0x3f;//初始化temp3的值与六路输出的初始值保持一致 temp = 0xf0; R_counter = 0; T_counter = 0; } void initial_comm(void) { SCON = 0x50; //设定串行口工作方式:mode 1 ; 8-bit UART,enable ucvr TMOD = 0x21; //TIMER 1;mode 2 ;8-Bit Reload PCON = 0x80; //波特率不加倍SMOD = 1 TH1 = 0xfa; //baud: 9600;fosc = 11.0596 IE = 0x90; // enable serial interrupt TR1 = 1; // timer 1 RI = 0; TI = 0; ES = 1; EA = 1; }
MAX485实现PC机与单片机之间的串行通讯
利用MAX485实现PC机与单片机之间的串行通讯 摘要介绍一种RS-485接口芯片MAX485,利用此芯片可以很方便地实现PC机与单片机之间的串行通讯,同时给出PC机与单片机实现多点通讯的实例。 关键词RS-485串行通讯多点通讯 随着数据采集系统的广泛应用,通常由单片机构成的应用系统,如仪器仪表、智能设备等,都需要与PC机之间交换数据,实现与PC机之间的通讯功能,以充分发挥PC和单片机之间的功能互补,资源共享的优势。以往常用的RS-232协议在很大程度上已不能满足设计的要求,如传输速率慢,传输距离短,传输信号易受外界的干扰等缺点。本文介绍一种性能优越的RS-485接口芯片,以及如何利用此芯片实现单片机与PC机之间的远程通讯,并讨论将其功能进行扩充,实现PC机管理单片机阵列的功能。 1 RS-485协议简介及MAX485芯片介绍 由于RS-232的种种缺点,新的串行通讯接口标准RS-449被制定出来,与之相对应的是RS-485的电气标准。RS-485是美国电气工业联合会(EIA)制定的利用平衡双绞线作传输线的多点通讯标准。它采用差分信号进行传输;最大传输距离可以达到1.2 km;最大可连接32个驱动器和收发器;接收器最小灵敏度可达±200 mV;最大传输速率可达2.5 Mb/s。由此可见,RS-485协议正是针对远距离、高灵敏度、多点通讯制定的标准。 MAX485接口芯片是Maxim公司的一种RS-485芯片。 采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。它完成将TTL电平转换为RS -485电平的功能。其引脚结构图如图1所示。从图中可以看出,MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只
基于51单片机的双机串行通信课程设计 1000110061
基于AT89C51单片机的双机串行通信设计 姓名:杨应伟 学号:100110061 专业:机械设计制造及其制动化 班级:机电二班
前言 单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域随着计算机技术的发展及工业自动化水平的提高, 在许多场合采用单机控制已不能满足现场要求,因而必须采用多机控制的形式,而多机控制主要通过多个单片机之间的串行通信实现。串行通信作为单片机之间常用的通信方法之一, 由于其通信编程灵活、硬件简洁并遵循统一的标准, 因此其在工业控制领域得到了广泛的应用。 在测控系统和工程应用中,常遇到多项任务需同时执行的情况,因而主从式多机分布式系统成为现代工业广泛应用的模式。单片机功能强、体积小、价格低廉、开发应用方便,尤其具有全双工串行通讯的特点,在工业控制、数据采集、智能仪器仪表、家用电器方面都有广泛的应用。同时,IBM-PC机正好补充单片机人机对话和外围设备薄弱的缺陷。各单片机独立完成数据采集处理和控制任务,同时通过通信接口将数据传给PC机,PC机将这些数据进行处理、显示或打印,把各种控制命令传给单片机,以实现集中管理和最优控制。串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。 在通信过程中,使用通信协议进行通信。在测控系统和工程应用中,常遇到多项任务需同时执行的情况,因而主从式多机分布式系统成为现代工业广泛应用的模式。单片机功能强、体积小、价格低廉、开发应用方便,尤其具有全双工串行通讯的特点,在工业控制、数据采集、智能仪器仪表、家用电器方面都有广泛的应用。同时,IBM-PC机正好补充单片机人机对话和外围设备薄弱的缺陷。各单片机独立完成数据采集处理和控制任务,同时通过通信接口将数据传给PC机,PC机将这些数据进行处理、显示或打印,把各种控制命令传给单片机,以实现集中管理和最优控制。 串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。在通信过程中,使用通信协议进行通信。
基于单片机的双机串行通信
河南机电高等专科学校2015-2016学年第1学期通信实训报告 系别:电子通信工程系 班级: xxxxxx 学号: 13xxxxxxxxx 姓名: xxxxxxx 2015年12月
基于51单片机的双机串行通信 摘要:串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。在通信过程中,使用通信协议进行通信。 关键字:通信双机 一、总体设计 1设计目的 1.通过设计相关模块充分熟悉51单片机的最小系统的组成和原理; 2.通过软件仿真熟悉keil和proteus的配合使用; 3.通过软件编程熟悉51的C51编程规范; 4.通过实际的硬件电路搭设提高实际动手能力。 2.设计要求: 两片单片机之间进行串行通信,A机将0x06发送给B机,在B机的数码管上静态显示1,B机将0~f动态循环发送到A机,并在其数码管上显示。 3.设计方案: 软件部分,通过通信协议进行发送接收,A机先送0x06(B机数码管显示1)给B机(B机静态显示),当从机接收到后,向B机发送代表0-f的数码管编码数组。B收到0x06后就把数码表TAB[16]中的数据送给从机。 二、硬件设计 单片机串行通信功能 计算机与外界的信息交换称为通信,常用的通信方式有两种:并行通信和串行通信。51单片机用4个接口与外界进行数据输入与数据输出就是并行通信,并行通信的特点是传输信号的速度快,但所用的信号线较多,成本高,传输的距离较近。串行通信的特点是只用两条信号线(一条信号线,再加一条地线作为信号回路)即可完成通信,成本低,传输的距离较远。 51单片机的串行接口是一个全双工的接口,它可以作为UART(通用异步接受和发送器)用,也可以作为同步移位寄存器用。51单片机串行接口的结构如下:
51单片机与上位机串口通信程序设计
51单片机与上位机串口通信程序设计 1. 发送:向总线上发命令 2. 接收:从总线接收命令,并分析是地址还是数据。 3. 定时发送:从内存中取数并向主机发送. 经过调试,以上功能基本实现,目前可以通过上位机对单片机进行实时控制。程序如下: //这是一个单片机C51串口接收(中断)和发送例程,可以用来测试51单片机的中断接收 //和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的 #include< reg51.h> #include< stdio.h> #include< string.h> #define INBUF_LEN 4 //数据长度 unsigned char inbuf1[INBUF_LEN]; unsigned char checksum,count3 , flag,temp,ch; bit read_flag=0; sbit cp=P1^1; sbit DIR=P1^2; int i; unsigned int xdata *RAMDATA; /*定义RAM地址指针*/ unsigned char a[6] ={0x11,0x22,0x33,0x44,0x55,0x66} ; void init_serialcomm(void) { SCON=0x50; //在11.0592MHz下,设置串行口波特率为9600,方式1,并允许接收 PCON=0x00; ES=1;
TMOD=0x21; //定时器工作于方式2,自动装载方式TH0=(65536-1000)%256; TL0=(65536-1000)/256; TL1=0xfd; TH1=0xfd; ET0=1; TR0=1; TR1=1; // TI=0; EA=1; // TI=1; RAMDATA=0x1F45; } void serial () interrupt 4 using 3 { if(RI) { RI=0; ch=SBUF; TI=1; //置SBUF空 switch(ch) { case 0x01 :printf("A"); TI=0;break; case 0x02 :printf("B"); TI=0;break; case 0x03 :printf("C"); TI=0;break; case 0x04 :printf("D"); TI=0;break; default :printf("fg"); TI=0;break; } }
51单片机串口通信
一、串口通信原理 串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。串口通信的工作原理请同学们参看教科书。 以下对串口通信中一些需要同学们注意的地方作一点说明: 1、波特率选择 波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。MSC-51串行端口在四种工作模式下有不同的波特率计算方法。其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。 在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。在此模式下波特率计算公式为:波特率=(1+SMOD)*晶振频率/(384*(256-TH1)) 其中,SMOD——寄存器PCON的第7位,称为波特率倍增位; TH1——定时器的重载值。 在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。这要根据系统的运作特点,确定通信的频率范围。然后考虑通信时钟误差。使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。 下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。则TH1=256-62500/波特率 根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。列计数器重载值,通信误差如下表: 因此,在通信中,最好选用波特率为1200,2400,4800中的一个。 2、通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC机与单片机之间进行通信,在双方程式设计过程中,有如下约定:0xA1:单片机读取P0端口数据,并将读取数据返回PC机;0xA2:单片机从PC机接收一段控制数据;0xA3:单片机操作成功信息。 在系统工作过程中,单片机接收到PC机数据信息后,便查找协议,完成相应的操作。当单片机接收到0xA1时,读取P0端口数据,并将读取数据返回PC机;当单片机接收到0xA2时,单片机等待从PC机接收一段控制数据;当PC机接收到0xA3时,就表明单片机操作已经成功。 3、硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。我们采用了三线制连接串口,也就是说和计算机的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。
(完整版)51单片机串行通信课程设计
****************** 实践教学 ****************** XXXXXX大学 XXXXXXXX学院 XXX年XXXX季学期 《XXXXXX课程设计》 题目:51单片机双机串行通信设计 专业班级: 姓名: 学号: 指导教师: 成绩:
摘要 通信技术根据传输方式的不同,分为串行通信和并行通信,而单片机在现代通信中非常实用。本次课程设计就是要利用单片机来完成一个系统,实现单片机双机串行通信。通信的结果用数码管进行显示,数码管采用查表方式显示。两个单片机之间采用RS232接口标准进行双机通信。在通信过程中,使用通信协议进行通信,实现两个单片机之间串行异步通信。 关键词:51单片机,串行通信,RS-232接口;
目录 前言 (1) 第一章基本原理 (2) 第二章系统分析 (3) 2.1单片机 (3) 2.2 串行通信 (3) 2.3 RS-232接口标准 (5) 第三章系统设计及系统调试 (9) 3.1 设计方案 (9) 3.2 硬件设计 (9) 3.3 软件设计 (12) 3.4 联合调试 (20) 总结 (21) 参考文献 (22)
前言 近年来,在自动化控制和智能仪器仪表中, 单片机的应用越来越广泛。虽然MCS 单片机内部包含有丰富的硬件资源,但是对于一些复杂的单片机应用系统来说, 光靠单个的单片机资源远远不能满足系统要求, 通常需要对单片机进行外部扩展。例如扩展I/O 口, 扩展存储器, 扩展定时/计数器等, 更有甚者还需要扩展单片机。那么一个应用系统就可能用到了两个或两个以上的单片机, 而这些单片机就需要通过互联来实现彼此间的数据通信。MCS 单片机具有串行口, 利用串行口实现数据通信。根据单片机端口内部的结构特点, 这些端口的端口线可以直接相连, 从而使两个单片机之间并行通信不用另外的硬件电路设备。设计时, 也可以根据不同的使用要求采用不同的并行连接方法。 51单片机的开发除了硬件支持外,同样离不开软件。用汇编语言或C语言等高级语言编写的源程序必须转换为机器码才能被执行。目前十分流行的是Keil 8051 C编译器。它提供了集成开发环境,包括C 编译器、宏汇编、连接器、库管理和仿真调试器。利用Keil C uVision编写的程序可直接调用编译器编译,连接后可直接运行。学生结合自己的实际情况,选择适合的方法来完成51单片机与PC机的串口通信。该题目概括了《通信原理》、《单片机原理》等课程的主要知识点,让人们对当代通信技术有一定程度的了解,知道我们是怎么利用单片机来进行串行通信的。
- 单片机间IO口串行通信实现
- 如何进行单片机串行通信
- 汇编语言实现串口通信(PC和单片机间)资料
- (完整版)51单片机串行通信课程设计
- 单片机IO口模拟串行实现数据通信
- 单片机IO口模拟串行实现数据通信
- MAX485实现PC机与单片机之间的串行通讯
- 89C51 单片机 IO 口模拟串行通信的实现方法
- 51单片机串行通信程序c语言
- 51单片机和计算机之间实现串口通信的电路图
- 基于双工方式的PC机与单片机之间的串行通信实现
- 与单片机实现串行通信
- 基于51单片机的双机串行通信课程设计-1000110061
- RS-232实现单片机与PC间的串行通信
- 用Delphi实现上位机和单片机的串行通信
- 单片机IO口模拟串行实现数据通信资料
- (完整版)51单片机串行通信课程设计
- 情景四 单片机串行通信的实现
- 单片机串行通信实验报告(实验要求、原理、仿真图及例程)
- 基于51单片机的串行通信协议的实现