投篮机器人说明书
一、作品简介(150字左右)
投篮机器人是由两辆车A 、B 构成的,首先A 车先去寻找球的位置,在寻找的过程中,实时通过无线模块将A 车的坐标发给B 车,在找到球时,发送球的位置坐标给B 车,进而B 车以最短的距离走向球的位置并通讯给机械手控制电路使其发出命令让机械手完成夹球动作,再发送标志位给A 车,进而A 车继续寻找篮筐的位置,再告知B 车篮筐的位置,同样,B 车以最短的距离走向篮筐并投球;当球投进篮筐时会有语音提示,并用24*24点阵显示字符;最后车在回到起始位置。
二、原理说明
A 、原理图:
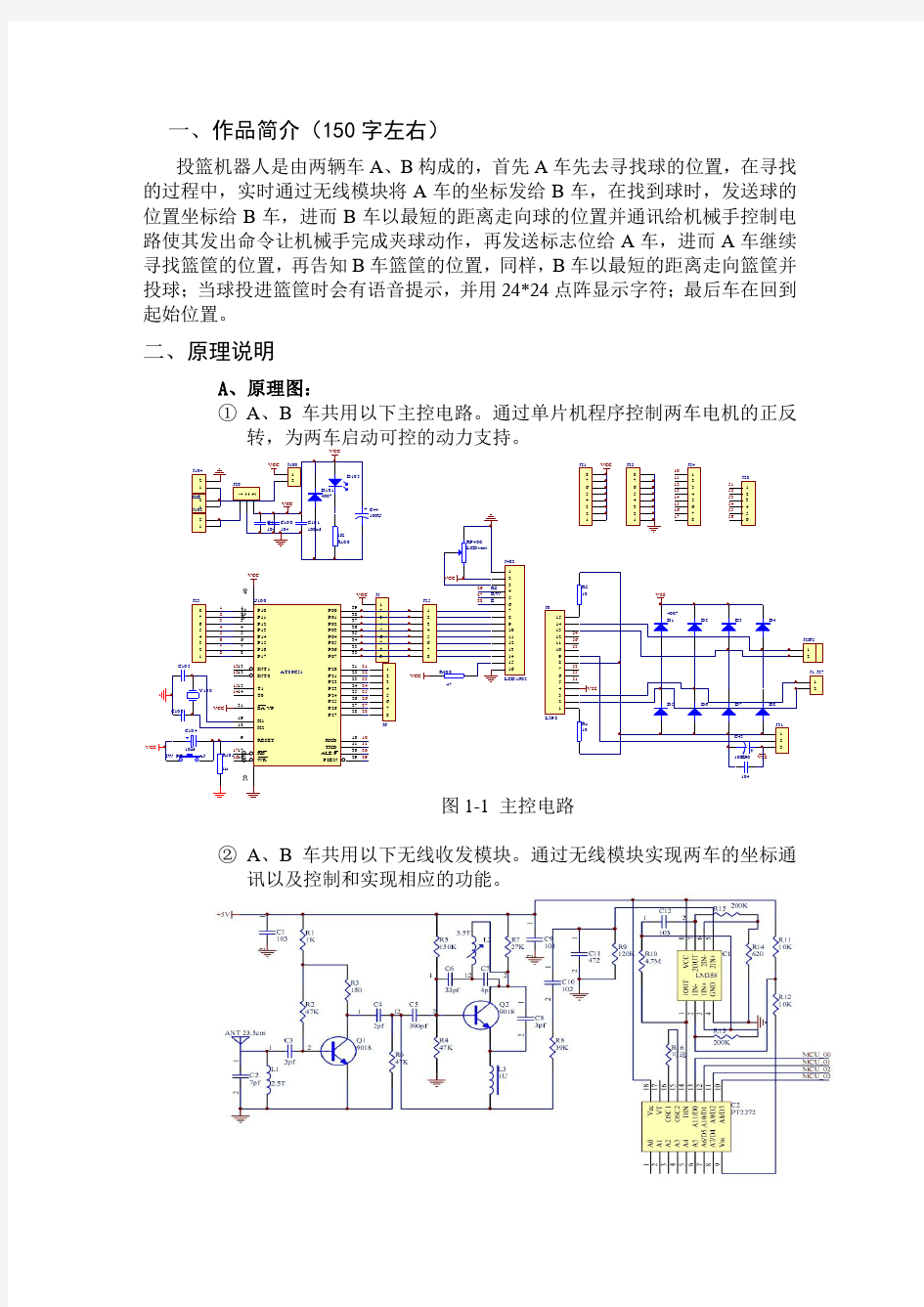
① A 、B 车共用以下主控电路。通过单片机程序控制两车电机的正反转,为两车启动可控的动力支持。
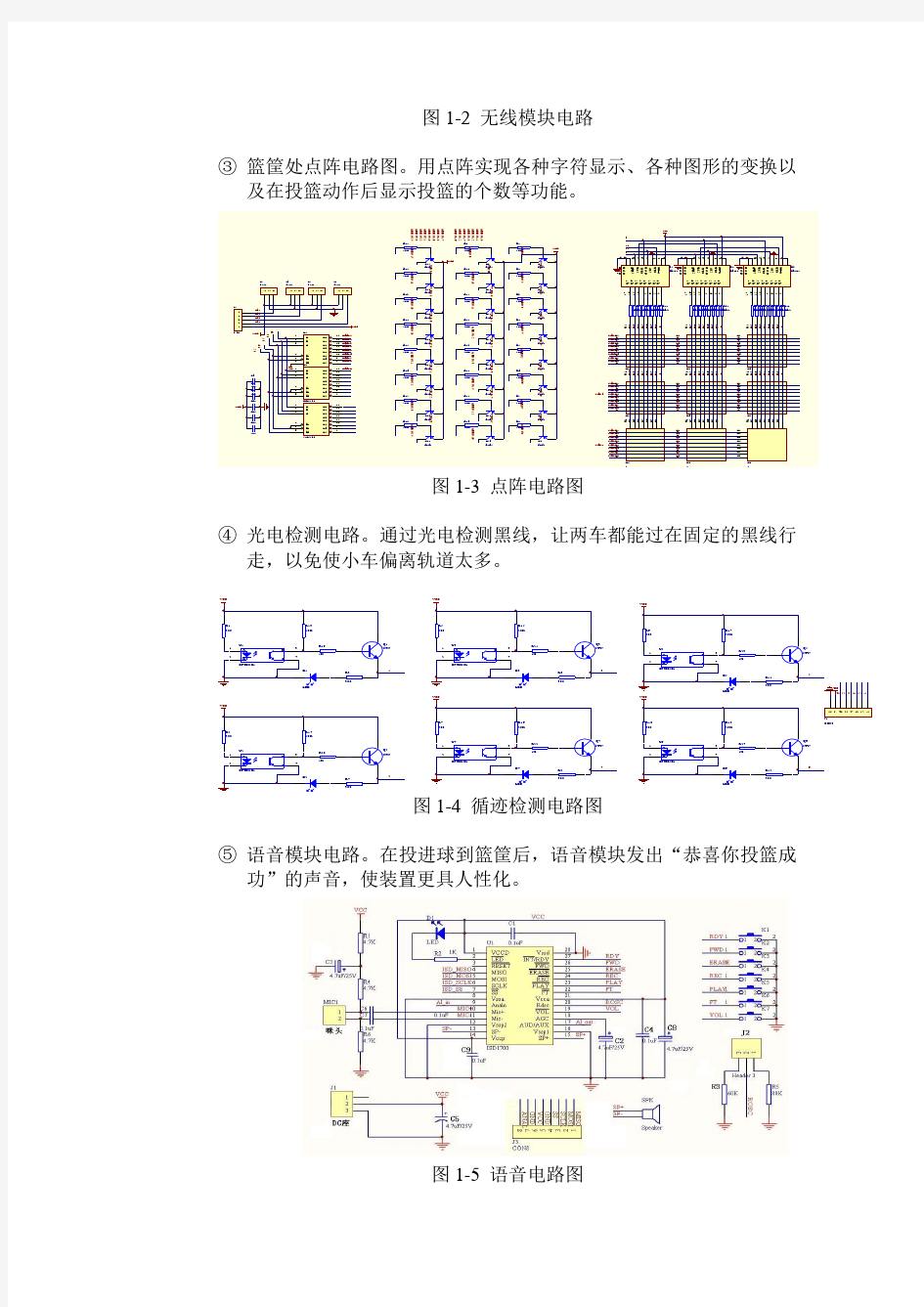
② A 、B 车共用以下无线收发模块。通过无线模块实现两车的坐标通讯以及控制和实现相应的功能。
图1-2 无线模块电路
④ 光电检测电路。通过光电检测黑线,让两车都能过在固定的黑线行走,以免使小车偏离轨道太多。
图1-4 循迹检测电路图
⑤ 语音模块电路。在投进球到篮筐后,语音模块发出“恭喜你投篮成功”的声音,使装置更具人性化。
图1-5 语音电路图
B、程序设计流程:
三、使用说明
图2-1 场地示意图
图2-2 A 车功能模块分布图
电机控制模舵机控制电路 舵机稳压模块
机械手 电池
开关指示灯
图2-3
B 车功能模块分布图
图2-4 篮筐模块分布图
无线模块
主控电路
电池
光电检测
点阵、语音主控
开关指示灯
性能特点:
1.具有时刻监视前车位置功能
2.具有自动矫正功能
3.具有语音警报功能
4.具有记忆,寻找最短路线功能
5.具有低功耗无线通讯功能
技术指标
1. 电源电压:5VDC/500MA,输入电源可为5~8V
2. 按键控制电路、液晶显示电路、语音模块
3. 无线模块3.3V/0.5MA
使用步骤:
a 、将两车摆放在场地的角落
b 、A车在前,B车在后
c 、将光电检测电路对准黑线
d 、现开启篮筐开关,再开启A车开关,然后开启B车的开关,最后开
启舵机电路开关
e 、延时功能完毕,关闭各个电源
注意事项:
a 、注意不能使无线模块磕磕碰碰,以免晶振损坏
b 、严禁随便拔插连接线
c 、严禁上电时掰动机械手
d 、严禁将车倒置摆放,而应轻拿轻放
e 、严禁随意掰动各个光电检测元件
f 、防止摔击
四、发展前景
目前,机器人已经越来越多、越来越广泛地应用于生产生活的各个方面。在机器人的研究领域里面,每个国家都在积极的研究,一直是于热门的领域,也取得的非常好的效果,希望将来能过替代人工操作;目前为止,本设计已经能过大概的模拟出“活物”的控制系统,但还是处于机器人研究的摸索阶段,还不过智能;投篮机器人在电子玩具上不仅有良好的观赏性,而且在控制精度领域里面也有大的进展。
在将来的发展前景上,向高级智能机器人前进.它和初级智能机器人不同的是具有感觉,识别,推理和判断能力,同样可以根据外界条件的变化,在一定范围内自行修改程序.还有,修改程序的原则不是由人规定的,而是机器人自己通过学习,总结经验来获得修改程序的原则.所以它的智能高出初能智能机器人.这种机器人已拥有一定的自动规划能力,能够自己安排自己的工作.这种机器人可以不要人的照料,完全独立的工作,故称为高级自律机器人.这种机器人也开始走向实用。
五、电路板照片
<1> 以下两张照片是两车共用的主控电路元件分布图和背面焊点图。
<2> 以下是篮筐处点阵显示屏元件分布图和背面焊点图。
程序:
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit EN=P1^4;
sbit STR=P1^5;
sbit SER=P3^0; //数据输入
sbit CLK=P3^1;
sbit ISD_FWD=P2^0; //下一曲
sbit ISD_PLAY=P2^1; //播放
sbit ISD_REST=P2^2;
uchar code dongtai[7][72]= {
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x18,0x18,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
},
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x3C,0x3C,0x3C,0x3C,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
},
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0xFF,0xFF,0xC3,0xC3,0xC3,0xC3,0xFF,0xFF, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
},
{
0x00,0x00,0x00,0x00,0x00,0x00,0x03,0x03, 0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03, 0x03,0x03,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0xC0,0xC0,
0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0, 0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00
},
{
0x00,0x00,0x00,0x00,0x0F,0x0F,0x0C,0x0C, 0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C, 0x0C,0x0C,0x0F,0x0F,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0xFF,0xFF,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0xFF,0xFF,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0xF0,0xF0,0x30,0x30, 0x30,0x30,0x30,0x30,0x30,0x30,0x30,0x30,
0x30,0x30,0xF0,0xF0,0x00,0x00,0x00,0x00
},
{
0x00,0x00,0x3F,0x3F,0x30,0x30,0x30,0x30, 0x30,0x30,0x30,0x30,0x30,0x30,0x30,0x30, 0x30,0x30,0x30,0x30,0x3F,0x3F,0x00,0x00, 0x00,0x00,0xFF,0xFF,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0xFF,0xFF,0x00,0x00, 0x00,0x00,0xFC,0xFC,0x0C,0x0C,0x0C,0x0C, 0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,
0x0C,0x0C,0x0C,0x0C,0xFC,0xFC,0x00,0x00
},
{
0xFF,0xFF,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,
0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,
0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xFF,0xFF,
0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF,
0xFF,0xFF,0x03,0x03,0x03,0x03,0x03,0x03,
0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,
0x03,0x03,0x03,0x03,0x03,0x03,0xFF,0xFF
}
};
uchar code zimo1[]= {
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x07, //"武",
0x03,0x00,0x00,0x1F,0x3E,0x00,0x06,0x06,
0x06,0x06,0x06,0x07,0x0F,0x3E,0x18,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x07,0x03,0x00, //"夷",
0x03,0x01,0x00,0x07,0x07,0x06,0x07,0x0F,
0x0C,0x00,0x00,0x00,0x01,0x03,0x0E,0x38,
0x00,0x00,
0x00,0x00,0x03,0x03,0x01,0x00,0x00,0x09, // "学",
0x1F,0x18,0x38,0x31,0x10,0x00,0x00,0x00,
0x1F,0x0C,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x03,0x07,0x3F,0x12,0x12,0x12, // "院",
0x12,0x13,0x1F,0x13,0x11,0x10,0x10,0x10,
0x10,0x10,0x30,0x30,0x33,0x00,0x00,0x00,
0x00,0x00,
0x00,0x01,0x01,0x03,0x03,0x07,0x04,0x08, //"第",
0x10,0x01,0x00,0x04,0x07,0x06,0x06,0x07,
0x0E,0x00,0x00,0x03,0x07,0x0C,0x30,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x00, // "三",
0x00,0x00,0x00,0x00,0x01,0x00,0x00,0x00,
0x00,0x00,0x03,0x7F,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x03,0x03,0x01,0x01,0x01,0x03, //"届",
0x03,0x03,0x03,0x02,0x07,0x07,0x0D,0x0C,
0x18,0x10,0x30,0x60,0xC0,0x80,0x00,0x00,
0x00,0x00,
0x00,0x06,0x07,0x03,0x02,0x02,0x02,0x03, // "校",
0x1F,0x3E,0x06,0x06,0x0F,0x1F,0x16,0x36,
0x66,0xC6,0x06,0x06,0x06,0x06,0x04,0x00,
0x00,0x00,
0x00,0x00,0x00,0x01,0x03,0x0D,0x00,0x00, //"科",
0x01,0x3F,0x79,0x03,0x03,0x06,0x0D,0x19,
0x31,0x41,0x01,0x01,0x01,0x01,0x00,0x00,
0x00,0x00,
0x06,0x07,0x03,0x03,0x03,0x03,0x03,0x07, //"技",
0x3F,0x13,0x03,0x03,0x03,0x0F,0x3A,0xF3,
0xE3,0x03,0x03,0x03,0x0E,0x06,0x00,0x00,
0x00,0x00,
0x00,0x00,0x01,0x01,0x00,0x03,0x3F,0x00, //"节",
0x00,0x00,0x00,0x07,0x02,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1F, // "电",
0x0C,0x0C,0x0C,0x0D,0x04,0x04,0x06,0x07,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x03,0x03,0x00,0x00,0x00,0x00, //"子",
0x00,0x00,0x3F,0x3C,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x0E,0x0F,0x07,0x00,0x00,0x00, // "设",
0x06,0x0E,0xFC,0xEC,0x0C,0x0C,0x0C,0x0C,
0x0D,0x0E,0x0E,0x1C,0x18,0x00,0x00,0x00,
0x00,0x00,
0x00,0x06,0x03,0x03,0x01,0x00,0x00,0x03, //"计",
0x07,0x3F,0x76,0x02,0x02,0x02,0x06,0x07,
0x07,0x0F,0x0E,0x04,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0x03,0x00,0x00,0x00, // "竞",
0x00,0x1F,0x3C,0x01,0x01,0x01,0x01,0x00,
0x00,0x00,0x00,0x01,0x03,0x06,0x1C,0x00,
0x00,0x00,
0x00,0x00,0x00,0x0F,0x0C,0x18,0x1B,0x00, // "赛",
0x01,0x00,0x00,0x0F,0x01,0x03,0x07,0x0D,
0x19,0x31,0x01,0x00,0x00,0x01,0x03,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
uchar code zimo2[]= {
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x1C,0x1C,0x0C,0x0C,0x0C,0x0C,0xFC,0xE4,
0x07,0x0F,0xFE,0xC6,0xC2,0x5B,0xFB,0xC3,
0xC1,0xC1,0xF8,0xE0,0x80,0x00,0x00,0x00,
0x00,0x00,
0x60,0x30,0x30,0x30,0x3F,0xFC,0x30,0x37,
0xFF,0xB3,0x3F,0xFC,0x20,0x2F,0xFE,0x60,
0x60,0x71,0xD8,0xCC,0x86,0x03,0x01,0x00,
0x00,0x00,
0x01,0x31,0x31,0x99,0x99,0x83,0x03,0xFC,
0x00,0x06,0xFF,0xE7,0x04,0x18,0x0D,0xFF,
0xCC,0x0C,0x0C,0x0C,0x0C,0x0C,0x7C,0x38,
0x00,0x00,
0x00,0x0C,0x0E,0x87,0x00,0x6F,0x70,0x60,
0x43,0x5F,0x00,0x01,0x3F,0x73,0x1B,0x1B,
0x32,0x22,0x63,0xC3,0x01,0x00,0x00,0x00,
0x00,0x00,
0x01,0x83,0x83,0xF7,0x86,0x8D,0xD8,0x43, 0x3F,0xF1,0x19,0x3F,0xF0,0x10,0x1F,0xF0, 0x70,0x70,0xD1,0x90,0x10,0x10,0x30,0x30,
0x00,0x00,
0x00,0x00,0x00,0x00,0x03,0x3F,0xFE,0x00, 0x00,0x00,0x00,0x1F,0xFF,0x00,0x00,0x00, 0x00,0x07,0xFF,0xC0,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x01,0x1F,0xF8,0x81,0x81,0xFF,0xF8, 0x0E,0x0C,0x0C,0x07,0xFE,0x8C,0x87,0xBF, 0x8C,0xCC,0xCF,0xFF,0xC0,0x00,0x00,0x00,
0x00,0x00,
0x00,0x07,0x03,0x01,0x00,0x00,0x1F,0xDC, 0xC0,0x18,0x18,0x31,0x61,0xB1,0x89,0x07, 0x07,0x07,0x0D,0x38,0xE0,0x00,0x00,0x00,
0x00,0x00,
0x00,0x40,0x70,0xF0,0x80,0xC7,0x83,0xB0, 0xF6,0x87,0x81,0xF0,0xA1,0x9F,0x80,0x80, 0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x00,
0x07,0x03,0x03,0x03,0x03,0x03,0x07,0xDF, 0x02,0x02,0x03,0x8F,0x38,0x19,0x0D,0x07, 0x07,0x07,0x0F,0x78,0x60,0x00,0x00,0x00,
0x00,0x00,
0x02,0x03,0x83,0x83,0x83,0xFF,0xC6,0xC4, 0xC4,0x01,0x7F,0xF0,0x30,0x30,0x30,0x30, 0x37,0x33,0x31,0x30,0x30,0x30,0x30,0x30,
0x00,0x00,
0xC0,0x70,0x70,0x60,0x60,0x61,0x7F,0xE1,
0x61,0x61,0x7D,0xE1,0x63,0x63,0xFF,0xE2,
0x60,0x60,0x60,0x30,0x3F,0x00,0x00,0x00,
0x00,0x00,
0x01,0x07,0xFF,0xC3,0x06,0x06,0x38,0x18,
0x18,0x7F,0xEC,0x0C,0x0C,0x0C,0x0C,0x0C,
0x0C,0x0C,0x0C,0x9C,0x7C,0x38,0x10,0x00,
0x00,0x00,
0x00,0x01,0x3F,0x3D,0x19,0x19,0x19,0x11,
0x30,0x20,0x43,0x1F,0x01,0x31,0x1B,0x8F,
0x06,0x0F,0x1F,0x31,0xE0,0x00,0x00,0x00,
0x00,0x00,
0x03,0x03,0x81,0x81,0x81,0x01,0x01,0x01,
0x01,0x0F,0x7F,0x01,0x01,0x01,0x61,0xC1,
0x81,0x01,0x01,0x01,0x01,0x01,0x01,0x01,
0x00,0x00,
0x38,0x1C,0x08,0x0F,0xFF,0x83,0xC6,0x64,
0x3F,0xF0,0x03,0x7F,0xC3,0x83,0x8F,0xFC,
0x6C,0x6C,0xCC,0x8C,0x8C,0x0C,0x07,0x00,
0x00,0x00,
0x30,0x18,0x3F,0xE8,0x8C,0xFE,0xC8,0x5E,
0xF8,0x4B,0xFF,0x86,0x8F,0xFF,0x86,0xB6,
0xB6,0xA6,0xA6,0x74,0x4C,0x86,0x07,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
uchar code zimo3[]= {
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0xE0,0xF0,0x20,0x00,0x00, 0xE0,0x80,0x00,0x00,0x00,0x00,0x00,0x00, 0x80,0x80,0xC0,0xC2,0x62,0x36,0x1E,0x0E,
0x00,0x00,
0x00,0x00,0x00,0xE0,0xE0,0x00,0x00,0x80, 0xC0,0x80,0x00,0x00,0x40,0xF0,0x70,0x60, 0x60,0xE0,0xC0,0x00,0x00,0x80,0xF0,0xFE,
0x00,0x00,
0xC0,0xC0,0x80,0x80,0x00,0x00,0xF8,0x1C, 0x3C,0x30,0x00,0x00,0x00,0x00,0xF8,0xF8, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0xF0,0xF8,0x78,0x40, 0x80,0x00,0x00,0xE0,0xC0,0x00,0x00,0x04, 0x04,0x04,0x0C,0x1E,0xFC,0x00,0x00,0x00,
0x00,0x00,
0x00,0x80,0xF0,0xE0,0x00,0x80,0xC0,0x00, 0xC0,0x80,0x00,0x00,0x00,0x70,0xF8,0x38, 0x30,0x30,0xE0,0xE0,0x40,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0xC0,0xC0,0x00,0x00, 0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00, 0x00,0xFC,0xFE,0x06,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0xC0,0xE0,0xE0,0x80,0x80,0x80,0x00, 0x00,0x00,0x00,0xF0,0x38,0x38,0xB0,0xB0, 0x30,0x70,0x60,0xE0,0xE0,0x60,0x00,0x00,
0x00,0x00,
0xC0,0xF0,0x30,0x80,0x80,0x80,0x80,0x00, 0x00,0x00,0xC0,0xF0,0x7F,0x3F,0x00,0x00,
0x00,0x00,
0x60,0x70,0x70,0x60,0x60,0x60,0x60,0x60, 0x60,0x60,0x60,0x6F,0xFF,0xE0,0x60,0x60, 0x60,0x60,0x60,0x60,0x60,0x60,0x60,0x60,
0x00,0x00,
0x00,0x80,0x00,0x00,0x00,0x70,0xE0,0x00, 0x00,0x00,0xC0,0xE0,0xC0,0x80,0x80,0x80, 0x00,0x80,0xC0,0xF8,0x7F,0x1C,0x00,0x00,
0x00,0x00,
0x00,0x80,0x00,0x00,0xFC,0xF8,0x00,0x00, 0x00,0xC0,0xE0,0xE0,0xC0,0xC0,0xC0,0xC0, 0xC0,0xC0,0x80,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x80,0xC0,0xE0, 0xC0,0x80,0x80,0x80,0x00,0x00,0x00,0x08, 0x08,0x18,0x18,0x3C,0xF8,0x00,0x00,0x00,
0x00,0x00,
0x00,0xC0,0xC0,0x80,0x00,0x00,0x00,0x00, 0xFC,0xFE,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,
0x00,0x80,0xC0,0x80,0x00,0x00,0x00,0xF8, 0xF0,0x00,0x80,0xC0,0x80,0x80,0x00,0x00, 0x00,0x00,0x80,0xF0,0xFF,0x00,0x00,0x00,
0x00,0x00,
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80, 0xFC,0xFE,0x00,0x80,0x80,0x80,0x80,0x80,
0x00,0x00,
0x00,0x00,0x00,0xC0,0x00,0x00,0x00,0xFC,
0xFC,0x00,0x00,0x80,0x80,0x00,0x00,0x00,
0x00,0x00,0x04,0x04,0x0C,0x1E,0xFC,0x00,
0x00,0x00,
0x00,0xC0,0xE0,0x70,0xC0,0x00,0x00,0x00,
0x00,0xC0,0xC0,0x00,0x00,0xC0,0xF0,0x7E,
0x38,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
};
uchar code numbers[][72]= {
{
0x00,0x00,0x01,0x06,0x08,0x10,0x10,0x21, //0
0x21,0x41,0x41,0x41,0x41,0x41,0x41,0x21,
0x21,0x10,0x10,0x08,0x06,0x01,0x00,0x00,
0x00,0x7E,0x81,0x00,0x3C,0x7E,0xC3,0x81,
0x81,0x81,0x81,0x81,0x81,0x81,0x81,0x81,
0x81,0xC3,0x7E,0x3C,0x00,0x81,0x7E,0x00,
0x00,0x00,0x80,0x60,0x10,0x08,0x08,0x84,
0x84,0x82,0x82,0x82,0x82,0x82,0x82,0x84,
0x84,0x08,0x08,0x10,0x60,0x80,0x00,0x00
},
{
0x00,0x00,0x01,0x06,0x08,0x10,0x10,0x20, // "①",
投篮机器人的动作设计
摘要 我是一名物流专业的学生,对机械没有太多的了解,但我比较喜欢看机器人一类的电影和纪录片,所以我对机器人有一种莫名的喜爱,更是对那些机器人设计师崇拜至极,而选择这门课也使我学习和了解了更多的机器人知识,对机器人有了机一部的了解,同时更加崇拜那些机器人设计师,而自己内心也深深的希望能够设计一个自己喜欢的机器人。我个人平时比较喜欢篮球,所以就设想设计一个自主投篮机器人,而我由于专业知识的限制和在机器人方面知识的欠缺,只能通过网络搜集和图书馆查阅资料来简单描述一下我的设计方案和思路,下面就是我的设计方案和自主投篮机器人的介绍: 关键词:机器人,投球,气动控制,PLC控制 目录 1 引言 (1) 1.1机器人概述 (1) 2 总体方案分析与策略 (1) 3 行驶机构的设计 ..................................................................... 错误!未定义书签。4吃球部分设计 (1) 5 投球部分设计 (3) 6 控制回路设计 (4) 8 以PLC为核心的控制系统方案 ........................................... 错误!未定义书签。 8.4控制系统功能介绍 (4) 8.5前进/后退,变速控制及投球控制 (4) 8.6自动送球控制 (5) 9 总结 (5) 参考文献 ..................................................................................... 错误!未定义书签。
1 引言 1.1 机器人概述 机器人科学是一门综合了机械、电子、材料、计算机、传感器、仿生、人工智能等多种前沿科学的综合性学科,是最能体现一个国家基础科学技术和制造业水平的学科之一。 机器人真正出现在人类社会中的历史并不算长,1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人,机器人的历史才算真正开始。机器人发展到现在,可以分为三代:第一代是示教再现型机器人:它由人操纵机械手做一遍应当完成的动作或通过控制器发出指令让机械手臂动作,在动作过程中机器人会自动将这一过程存入记忆装置。当机器人工作时,能再现人教给它的动作,并能自动重复的执行。这类机器人不具有外界信息的反馈能力,很难适应变化的环境。第二代是有感觉的机器人:它们对外界环境有一定感知能力,并具有听觉、视觉、触觉等功能。机器人工作时,根据感觉器官(传感器)获得的信息,灵活调整自己的工作状态,保证在适应环境的情况下完成工作。第三代是具有智能的机器人:智能机器人是靠人工智能技术决策行动的机器人,它们根据感觉到的信息,进行独立思维、识别、推理,并作出判断和决策,不用人的参与就可以完成一些复杂的工作。目前,智能机器人已在许多方面具有人类的特点,随着机器人技术不断发展与完善,机器人的智能水平将越来越接近人类。 2 总体方案分析与策略 要想实现投篮的功能,机器人必须在以下几个方面达到要求: (1)功能强大为了能完成比投篮动作,必须具备高效、可靠的动作机构。 (2)信息处理能力强需要按照一定的路线行进,对环境位置信息进行处理和判断,以便完成既定任务。 (3)速度快速度是抢占场上优势最重要的手段。 (4)坚固稳定要考虑防止机器人倾覆的措施。 3球部分设计 对吃球机构的要求是,能够在较短的时间内尽可能地将球拾取到机器人内的指定位置。另外如果球散落各个角落,手动机器人应该有足够的灵活性来拾取这些燃料球。手动机器人的球发射机构通常距离地面有一定距离,所以还需要特定机构将球提升到指定高度。 1
定点投篮机器人机构设计
目录 摘要 (1) 绪论 (2) 1取球机构的设计与制作 (7) 1.1取球方案分析 (8) 1.2取球方案的确定 (14) 1.3机器人车身的设计 (16) 1.4关键零部件的设计及制作 (19) 1.4.1电机的确定 (19) 1.4.2摩擦带的设计及制作 (24) 1.4.3取球轮的设计及制作 (25) 1.4.4驱动轴的设计及制作 (27) 1.4.5导轨的设计及制作 (28) 1.5取球机构的安装与调试 (28) 2定点投篮机器人其他机构的安装与调试 (28) 3毕业设计结束语 (34) 4参考文献 (35)
摘要 本文针对2016CCTV全国大学生机器人电视大赛的规则,讨论分析了机器人取球方案及机器人车身造型的设计,用Solidworks和AutoCad进行模拟和制图。分析了机器人球的提取方案和机器人体的造型设计,并利用SolidWorks和AutoCAD软件对人体进行了仿真和绘制。在总质量极限不大于17kg/dC24V电源限制的情况下,讨论了关键部件材料的选择和确定,特别是直流电机参数的确定。重点介绍了直流电动机的组成和工作原理。最后,用图片和图片对机器人进行处理和调试。 关键词:定点投篮机器人;取球;直流电机 Abstract:The extraction scheme of robot ball and the modeling design of human body are analyzed, and the simulation and drawing of human body are carried out by using SolidWorks and AutoCAD software. When the total mass limit is not greater than the limit of 17kg/dC24V power supply, the material selection and determination of key components, especially the determination of DC motor parameters, are discussed. The composition and working principle of DC motor are introduced emphatically. Finally, the robot is processed and debugged with pictures and pictures. Keywords: Fixed-point shooting robot; fetching ball; DC motor Keywords :; Fixed-point shooting;robotFetching ball; DC electromotor 绪论 机器人是一个高度交叉的前沿学科。机器人的诞生和发展无疑是人类科学技术在二十世纪取得的巨大成就。在过去的40年中,越来越多的机器人被应用于各个行业,越来越多的机器人科学家从事不同方向的机器人的研发和应用。机器人在世界经济的各个领域和人类生活的各个方面都忠于人类。机器人在上个世纪
投篮机器人说明书
一、作品简介(150字左右) 投篮机器人是由两辆车A 、B 构成的,首先A 车先去寻找球的位置,在寻找的过程中,实时通过无线模块将A 车的坐标发给B 车,在找到球时,发送球的位置坐标给B 车,进而B 车以最短的距离走向球的位置并通讯给机械手控制电路使其发出命令让机械手完成夹球动作,再发送标志位给A 车,进而A 车继续寻找篮筐的位置,再告知B 车篮筐的位置,同样,B 车以最短的距离走向篮筐并投球;当球投进篮筐时会有语音提示,并用24*24点阵显示字符;最后车在回到起始位置。 二、原理说明 A 、原理图: ① A 、B 车共用以下主控电路。通过单片机程序控制两车电机的正反转,为两车启动可控的动力支持。 ② A 、B 车共用以下无线收发模块。通过无线模块实现两车的坐标通讯以及控制和实现相应的功能。
图1-2 无线模块电路 ④ 光电检测电路。通过光电检测黑线,让两车都能过在固定的黑线行走,以免使小车偏离轨道太多。 图1-4 循迹检测电路图 ⑤ 语音模块电路。在投进球到篮筐后,语音模块发出“恭喜你投篮成功”的声音,使装置更具人性化。 图1-5 语音电路图
B、程序设计流程:
三、使用说明 图2-1 场地示意图 图2-2 A 车功能模块分布图 电机控制模舵机控制电路 舵机稳压模块 机械手 电池 开关指示灯
图2-3 B 车功能模块分布图 图2-4 篮筐模块分布图 无线模块 主控电路 电池 光电检测 点阵、语音主控 开关指示灯
性能特点: 1.具有时刻监视前车位置功能 2.具有自动矫正功能 3.具有语音警报功能 4.具有记忆,寻找最短路线功能 5.具有低功耗无线通讯功能 技术指标 1. 电源电压:5VDC/500MA,输入电源可为5~8V 2. 按键控制电路、液晶显示电路、语音模块 3. 无线模块3.3V/0.5MA 使用步骤: a 、将两车摆放在场地的角落 b 、A车在前,B车在后 c 、将光电检测电路对准黑线 d 、现开启篮筐开关,再开启A车开关,然后开启B车的开关,最后开 启舵机电路开关 e 、延时功能完毕,关闭各个电源 注意事项: a 、注意不能使无线模块磕磕碰碰,以免晶振损坏 b 、严禁随便拔插连接线 c 、严禁上电时掰动机械手 d 、严禁将车倒置摆放,而应轻拿轻放 e 、严禁随意掰动各个光电检测元件 f 、防止摔击 四、发展前景 目前,机器人已经越来越多、越来越广泛地应用于生产生活的各个方面。在机器人的研究领域里面,每个国家都在积极的研究,一直是于热门的领域,也取得的非常好的效果,希望将来能过替代人工操作;目前为止,本设计已经能过大概的模拟出“活物”的控制系统,但还是处于机器人研究的摸索阶段,还不过智能;投篮机器人在电子玩具上不仅有良好的观赏性,而且在控制精度领域里面也有大的进展。 在将来的发展前景上,向高级智能机器人前进.它和初级智能机器人不同的是具有感觉,识别,推理和判断能力,同样可以根据外界条件的变化,在一定范围内自行修改程序.还有,修改程序的原则不是由人规定的,而是机器人自己通过学习,总结经验来获得修改程序的原则.所以它的智能高出初能智能机器人.这种机器人已拥有一定的自动规划能力,能够自己安排自己的工作.这种机器人可以不要人的照料,完全独立的工作,故称为高级自律机器人.这种机器人也开始走向实用。
智能式移动机器人设计说明书
智能移动式送料机器人机械系统设计 摘要:智能移动式送料机器人以电动机作为驱动系统,运用单片机传感器等技术达到其智能移动的目的,实现行走、刹车、伸缩、回转等多种动作的操作。因此它具有机械化、程序化、可控化、适应性、灵活性强的特点。 前言:工业机器人是一种典型的机电一体化产品在现代生产中应用日益广泛,作用越来越重要,机器人技术是综合了计算机、控制、机构学、传感技术等多学科而形成的高新技术是当代研究十分活跃,应用日益广泛的领域。
现在,国际上对机器人的概念已经逐渐趋近一致。一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。”我国研制的排爆机器人不仅可以排除炸弹,利用它的侦察传感器还可监视犯罪分子的活动。监视人员可以在远处对犯罪分子昼夜进行观察,监听他们的谈话,不必暴露自己就可对情况了如指掌。 智能小车,又称轮式机器人,可以在人类无法
适应的恶劣和危险环境中代替人工作。它是一个集环境感知,规划决策,自动驾驶等功能于一体的智能系统。现如今已在诸多领域有广泛的应用。对于快要毕业的大学生来说也是一个实时、富有意义和挑战的设计课题。 正文: 设计方案: 一课题名称:智能移动式送料机器人设计 二机器人工作过程及设计要求 自主设计智能移动小车,设计一个取料 手爪装配到小车上,完成取料机器人的机械系统设计,并进行机器人运动规划和取料虚拟仿真,使机
器人完成如下动作:沿规定路径行驶——工件夹取——车体旋转——手爪张开,将工件从储存处送到运料车上。 三机器人设计的内容 一机械手的设计:
投篮机器人设计
投篮机器人设计 第一章绪论 1.1机器人概述.............................. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 1 1.2...................................... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 2 1.3.................................. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .4 1.4............................................ .. .. .. .. .. .. .. .. .. .. .. .. .. (5) 第二章系统架构与相关技术基础 2.1 硬件设 计.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . .. .. .. 2.1.1 处理 器.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . .. 2.1.2 CCD.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 2.1.3 超声 波.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . .. .. .. .. ..
电子设计作品-机器人寻线投篮大赛-A
机器人寻线投篮大赛 关于开展“校庆杯”机器人寻线投篮大赛的通知 各学院分团委: 为迎接我校周年华诞,丰富学生的第二课堂,活跃校园科技创新氛围,促进学生动手能力和综合素质的提高,在校友总会的大力支持下,开展“校庆杯”机器人寻线投篮大赛。 机器人大赛是一项展示当代大学生科技创新能力和动手能力的大型课外科技活动赛事,它以科技含量高、学科跨度宽、参与面广和展示性强等特点在国际上有着很强的影响力。开展机器人竞赛活动,旨在提高同学们的科学素养,培养学生的实践能力和创新精神,引导更多的同学关注科技、热爱科技、走进科技,涌现出更多的优秀科技人才。 机器人寻线投篮大赛是积极推进校园科技文化建设的一项举措,也是各学院展示学生综合实力和风采的很好机会,希望各学院高度重视、精心策划、认真组织,切实做好各项活动的组织实施工作。 一、活动主题 让思维沸腾起来,让智慧行动起来 二、大赛组织 主办单位:校友校董办 校团委 承办单位:学院 协办单位:各学院分团委、学生会 机器人协会 领导小组 组长:党委副书记 副组长:校友校董办 党委学生工作部部长 校团委书记 学院总支副书记 成员:各学院总支副书记、分团委书记 活动办公室
主任:校团委书记 成员:校团委办公室 学院分团委书记 各学院分团委书记、学生会主席、分团委副书记 三、参赛办法 以各学院学生自由组队参赛,各学院参赛队伍不限 参赛对象:在读全日制博士生、硕士生、本科生 报名时间:即日起至月日止 报名地点: 四、经费支持 对各参赛队提供100~300元的制作经费支持 对各参赛队资助的经费仅限于机器人的制作及相关器件购买等,发票内容须详细填写 五、咨询培训 本次大赛组委会办公室设立在学院分团委,在大赛的进程中,组委会将举行与本次大赛相关的系列讲座等指导性和交流性活动,并及时通知各参赛队讲座内容和时间地点。 咨询电话:咨询地点:E-mail: 六、赛程安排 本次大赛分报名、正式比赛和表演展示三个阶段 1.报名阶段(月日至月日) 各参赛队队员限报3人,填写“参赛报名表”(见附件4),于月日前将报名表及100元参赛保证金交大赛报名处。比赛结束之后,参赛的队伍全额退还保证金;赛前2周提交书面申请退出比赛的队伍,全额退还保证金;赛前1周提交书面申请退出比赛的队伍,退还50%保证金;比赛当天弃权的队伍,不退还保证金。 2.正式比赛时间(月中旬)地点: 按照比赛规则(见附件1)从所有参赛队伍中按照成绩排名,决出大赛各个奖项。 3.表演展示阶段(月中旬)地点: 向全校师生展示本次大赛成果,激发同学们的创造灵感,并进行相应的机器人知识宣传。 七、奖项设置 一等奖一名奖金1500元+证书 二等奖两名奖金各1000元+证书
关于投篮技术的动作方法.doc
关于投篮技术的动作方法 (一)原地投篮 原地投篮是最基本的投篮方法,是行进间投篮和跳起投篮的基础。原地投篮易于保持身体平衡,便于全身协调用力,比较容易掌握。一般在中、远距离投篮和罚球时运用较多。 1.双手胸前投篮:这种投篮虽然出球点较低,但出手前稳定性好,出手力量大,便于与传球、突破相结合,多用于远距离投篮。 动作方法;双手持球基本同双手胸前传球。两肘自然下垂,将球置于胸前,目视瞄准点。两脚前后或左右开立,两膝微曲,重心落在两脚之间。 投篮时,两脚蹬地,腰腹伸展,两臂向前上方伸出,两手腕同时外翻,拇指稍用力压球,食指、中指拨球,使球从拇指、食指、中指指端飞出。球出手后,脚跟提起,身体随投篮出手方向自然伸展。 动作关键:投篮时,蹬伸踝、膝、髋,双手用力均匀,手腕外翻,手指拨球。 2.双手头上投篮:这种投篮出球点高,不易封盖,便于与头上传球相结合。但是重心高,不便与运球和突破相结合。 动作方法:双手持球于头上,肘关节自然弯曲,两脚前后开立,两膝微屈,重心落在两脚之间。投篮时,两臂随下肢的蹬伸向前上方伸出,两手腕同时外翻,拇指、食指稍用力下压,用指端拨球,使球通过拇指、食指、中指指端飞出。球出手后,脚跟提起,身体随投篮出手方向自然伸展。 动作关键:手腕外翻,双手用力均匀。 3.单手肩上投篮:这是比赛中运用比较广泛的投篮方法,是行进间和跳起肩上投篮的基础。这种投篮出手点高,便于结合
其他技术动作,能在不同距离和位置上应用。 动作方法:以右手投篮为例,右脚在前,左脚稍后,两膝微曲,重心落在两脚之间。右手五指自然张开,用指根及指根以上部位触球,掌心空出,翻腕托球的后下部,右臂屈肘稍向内收,置球于右肩前上方,上臂与肩关节约成水平,前臂与地面近似垂直,左手扶球的左侧,目视瞄准点。投篮时,下肢蹬地发力。右臂随腰腹伸展向前上方抬肘伸臂,用手腕前屈和手指拨球动作,使球从食指、中指指端柔和飞出。球离手时,手臂要随球跟送,脚跟提起。 动作关键:脚蹬地、腰腹伸展、抬肘伸臂、屈腕拨指要顺序柔和用力。大拇指和小指要把握方向。 (二)行进间投篮 行进间投篮是在快速跑动中接球或运球后做中、近距离投篮时,所采用的一种投篮方法。一般多在快攻结束或突破切入篮下时运用。 行进间投篮动作方法很多,但动作结构基本相同,都是由跨步接球起跳、腾空举球出手和落地三个部分组成。其脚步动作的共同点是:跨第一步的同时接球,跨第二步时跳起空中投篮出手,双脚同时落地注意屈膝缓冲。在实际运用时,应根据投篮的距离、角度以及防守队员所处位置来决定投篮出手的动作方法。在投篮时要控制好身体平衡。跨步的大小、快慢、方向也应根据临场情况的不同而有所变化。 1.行进间单手肩上投篮:又称行进间单手高手投篮,是在比赛中切入篮下时,常用的一种投篮方法。 动作方法:以右手投篮为例,右脚向前跨一大步时接球,接着上左脚蹬地起跳,右腿屈膝上抬,同时双手举球于右肩前上方。腾空后,上体稍后仰,当接近了高点时,向前上方抬肘伸臂,用手腕前屈和手指拨球力量将球投出。 动作关键:跨步一大二小向上跳,节奏要清楚。出手时,腕、指用力要柔和。
第18课 让人型机器人动起来-创客教程
第18课让人型机器人动起来 学习目标 1、掌握人型机器人独立动作及连续动作的编程原理 2、掌握编程参数的调整方法 一、阅读与思考——Science 静止状态时,人型机器人保持站立姿势,但是只要我们设置出的动作协调、合理,人型机器人就可以丝毫不差的做出来。今天我们将要学习如何让机器人摆出更多的造型,学会新动作。 想一想: 如何保证机器人在做出连续动作时不会出现因重心不稳而跌倒的尴尬问题?二、独立动作原理——Engineering and Technology 打开程序文件“MF camera pose.bas”,人型机器人就可以摆出各种时尚POSE了。需要注意的是,两个定点姿势之间要有一定的“过渡姿势”,以帮助人型机器人保持平衡。希望同学能多多动手,体验动作的编制,体会机器人电机和控制器的运行方式。
图18.1 人型独立动作展示 三、连续动作原理——Engineering and Technology 想要为人型机器人编制出稳定的连续动作,就必须充分考虑两个动作之间的转换有没有障碍,再确定出合适的过渡方式和速度,以实现两个动作之间协调、美观的转换。下面就是人型机器人在仰卧的状态下,完成起身站立动作的过程: 图18.2人型连续动作展示1 下面就是人型机器人在俯卧的状态下,完成起身站立动作的过程:
图18.3人型连续动作展示2 四、程序实例——Technology 独立动作程序部分: frighter_pose: SPEED 6 MOVE G6B, 120, 40, 90 MOVE G6C, 120, 40, 90 WAIT SPEED 6 MOVE G6A, 70, 78, 141, 95, 127, 100 MOVE G6D, 97, 107, 93, 116, 102, 100 MOVE G6B, 145, 66, 87, , , 50 MOVE G6C, 170, 15, 32, , , WAIT 连续动作程序部分: '************************************* '***** ******ROBONOV A-II 程序*** '************************************* '*********************************
自动机器人投篮机构设计
目录 摘要 (2) 绪论 (3) 一取球机构的设计与制作 (8) 1.1取球方案分析 (9) 1.2取球方案的确定 (15) 1.3机器人车身的设计 (17) 1.4关键零部件的设计及制作 (19) (1)电机的确定 (19) (2)摩擦带的设计及制作 (24) (3)取球轮的设计及制作 (25) (4)驱动轴的设计及制作 (27) (5)导轨的设计及制作 (28) 1.5取球机构的安装与调试 (28) 二手动机器人其他机构的安装与调试 (28) 三毕业设计结束语 (33) 四参考文献 (34)
摘要 本文针对2003CCTV全国大学生机器人电视大赛的规则,讨论分析了机器人取球方案及机器人车身造型的设计,用Solidworks和AutoCad进行模拟和制图。 在有总质量限制不能超过17kg和DC24V电源限制的条件下,对关键零部件材料的选用及确定进行了讨论,特别是直流电机的各参数的确定,着重介绍了直流电机的组成和工作原理。最后加工制作出机器人实物,对机器人进行调试,附效果图及照片。 关键词:机器人;取球;直流电机 Abstract In this paper, we discuss and analyse the project of robot fetching the ball and the figure of the robot, according to the 2003 CCTV China university robocon. The robot’s simulation and the drawing is done by the Solidworks and the AutoCad. In the limit of the 17kg weight and the condition of the DC24V power supply, we discuss the material of the important part, especially the parameter of the DC electromotor. We also discuss the part of the DC electromotor and its working elements. Finally, we produce the robot, and debug the robot. There are some photo and picture of the robot in the last of this paper. Keywords : Robot; Fetching ball; DC electromotor
投篮动作的技术环节
投篮动作有以下几个技术环节:持球方法、瞄篮点、协调用力、出手角度与速度、球的旋转、投篮弧线与入篮角。在比赛中,影响投篮命中率的因素很多,例如:体能状况、投篮技术、投篮时机、心理素质等,都在一定程度上影响投篮命中率。在这里主要从投篮技术动作与投篮效果的内在联系的角度分析如何掌握正确的投篮技术动作从而提高投篮的准确性。 一、命中率低的投篮动作普遍存在着以下几种现象: 1、瞄篮点控制不好,使球的飞行方向产生左右偏差; 2、球在空中飞行时不是向后旋转,而是侧旋; 3、抛弧线不是过高就是过低; 4、球的飞行距离控制不好; 5、投篮动作的用力顺序概念模糊,导致投篮动作僵硬不协调。 产生以上几种现象的原因,通常被认为是投篮者对球的熟悉程度差;或是投篮时机不好,出手仓促;或是体能状态不好和心理素质差造成的。以上几种分析对于不同的对象和场合是不无道理的。但在绝大多数情况下更主要的是投篮者对投篮时如何正确控制球的出手和用力顺序认识有偏差,以及对投出的球所产生的错误飞行轨迹的真正原因缺乏正确的具体认识,因而无力进行有指向地、有效地纠正,并对在特殊情况下的投篮缺乏灵活机动的处理是构成低命中率的重要原因之一。这也在一定程度上反映出传统的投篮技术教学方法在对球的有效控制方面不够明确和完善。 二、投篮技术动作与效果内在联系的分析 在篮球投篮技术动作的教学训练中可以合理地利用手指、手腕及手臂与投篮效果的关系指导投篮动作的教学训练;利用行为动作控制和调整效果,使投篮技术动作的教学训练在短时间内获得成功。这种教学方法适用于各层次的篮球运动员,对于初学者来说更是可以达到事半功倍的效果。下面以原地单手投篮为例进行阐述。 1、处理好手指、手腕与投篮的关系 投篮时,持球手五指自然分开,特别是食指和中指分开得要更大一些,这是球出手前手对球发生作用的最后部位,十分重要。以掌根以上部位触球,增大手对球的接触面积,另一手扶球。投篮手的食指和中指一定要正对篮圈[而不一定是肘关节正对篮圈,否则动作会十分僵硬],篮球重心的投影点落在两手指[食指、中指]指根之间,手腕后仰。球出手时,手腕前屈,以指端拨球,最后通过食、中指柔和用力将球投出。应注意三个方面的问题,对球进行有指向地控制和调整。 [1] 投出的球是否绕横轴向后旋转。 [2] 投出的球是否有左右方向偏差。 [3] 护球手也是直接影响投篮准确与否的重要因素。 2、处理好手臂与投篮的关系
智能投篮训练器的设计-第01章 绪论
第01章绪论 1.1 研究的背景 根据记载,在公元前2000年的时候,中国便有最早的体育运动,当时最为流行的体育运动当属体操运动。在古埃及,从法老的纪念碑上有着许多关于体育运动的记载,比如说游泳,垂钓,并且这些记录也反映出了很详细的体育规则。而在古波斯,人们喜欢进行着投掷标枪,摔跤等与打斗技巧相关的运动。自从古代奥运会时期发展到现代,组织性与美学感受不断得到了加强。而且随着人们的物质水平的提高,人们也有了更多的精力与时间观赏体育运动。体育运动的宣传与传播也更为普遍,伴随着各种媒体方式的发展,人们不仅可以通过电视,手机,互联网对体育赛事进行关注,普通大众也可以获得相关的体育知识,从而自己进行相关锻炼,从中得到娱乐和精神上的满足。 近些年来,发达的科学技术固然给人们带来了各种方便,人们可以足不出户,利用电脑,手机等工具完成各种工作,就连出行也有各种各样的方式,人们可以坐飞机,坐高铁到达目的地。这些好处是毫无争议的,但同时,发达的科学技术也给人们带来一些负面影响。因为人们久坐办公室,采用各种代步工具,人们的身体素质难免会有所下降,越来越多的人处于亚健康状态。因此,人们应当选取合适的体育运动,加强自己的体育锻炼,在保证自己的身体健康的同时,还能舒缓心理压力,保证心理健康。 而篮球运动,就是一种极好的体育运动。人们在打篮球的时候不仅可以进行体能上的锻炼,还可以释放压力,令自己获得身心上的愉悦。同时,打篮球的时候人们还可以培养自己的毅力,是人们获得一种积极向上,直面困难的态度。此外,在打篮球的时候,人和人之间需要相互交流,需要相互的配合,因此篮球运动还可以帮助人们获取更多的朋友。总的来说,篮球运动是一项有着对抗性,集体性,观赏性,趣味性,健身性的运动。所以,提高自己的篮球水平就显得尤为重要了。 1.2 研究目的与意义 1.2.1 研究目的 通过调查与查阅资料我发现,在当今的市面上很少有关于投篮训练的机器,人们在进行篮球训练的时候,多是由教练站在一旁进行协助,或者是采用一个固定的障碍物进
基于虚拟人设计与实现机器人舞蹈动作的一种方法
文章编号:1007-757X(2012)5-0011-04 基于虚拟人设计与实现机器人舞蹈动作的一种方法 郭瑾,高伟,刘德山,徐本强 摘要:基于三维虚拟人的骨骼模型仿真实现了机器人的舞蹈动作。分析了机器人舞蹈动作运动的基本规律和实现动作的基本方法,基于此建立了三维虚拟人实现机器人舞蹈动作的关键帧数据库,在此基础上利用中间帧的过渡函数实现了虚拟人骨骼模型仿真机器人舞蹈动作的方法。实验中利用NOBODY机器人舞蹈视频实现了三维虚拟人骨骼模型的仿机器人的舞蹈动画,结果证明了方法的正确性和可行性,对于机器人的三维虚拟化和仿真研究具有重要意义。 关键词:舞蹈;机器人;三维虚拟人;仿真 中图分类号:TP311 文献标志码:A Design and Realization Method of Robot Dance Motion Based On Virtual Human Guo Jin, Gao Wei, Liu Deshan, Xu Benqiang (Computer and Information Technology, Liaoning Normal University, Dalian 116081,China) Abstract: This paper introduces realization of robot dance motion based on the simulation of 3D virtual human bone model. First, the basic regular pattern and basic realization method of robot dance motion are analyzed, and then build key frame database of robot dance motion implemented by 3D virtual human. Based on this, the transition function of middle frame is adopted to realize the si-mulation of robot dance motion by virtual bone model. In the experiment, NOBODY robot dance video is used to realize robot dance animation simulated by 3D virtual human bone model. The result of experiment shows that this method is correct and feasible, and it has important sense to 3D virtualization and simulation research. Key words: Dance; Robot; 3D Virtual Human; Simulation 0 引言 随着虚拟现实技术和机器人技术的日益成熟,音视频相结合的虚拟人模拟实现仿真机器人舞蹈动画作为一种崭新的艺术形式受到越来越广泛的关注,在包括计算机游戏在内的各种娱乐应用领域有着广泛的应用前景。虚拟人舞蹈借助计算机动画技术,通过虚拟角色模型的表演,演绎了音乐与舞蹈的内在联系。 由于仿人机器人在运动过程中本身动作的复杂性,以及各关节自由度的灵活性,仿人机器人高难度动作的种种控制效果都不理想,因此研究其运动控制方法显得特别重要。当前对仿人机器人控制方法的研究主要集中在双足运动与双手协作两个方面。双足运动的常用控制方法是先进行姿态规划,再按稳定性最大的要求进行优化,以求出最稳定的步态[1-3];而双手协作也需要先对双手的运动路径与姿态进行规划,然后考虑其他约束条件对其运动轨迹进行优化。由此可知,运动姿态与轨迹规划对于仿人机器人双足运动与双手协作控制至关重要。为了获得仿人机器人运动姿态预规划所需要的数据,一般是在某个表演者(真人)的主要关节上安装特制的标记点,然后由该表演者做出各种所需的动作,再采用动作捕捉器快速和连续地记录下这些标记点的空间坐标,从而获取人体的运动数据[4-5]。采用动作捕捉器虽然能够得到控制仿人机器人所需的运动数据,但需要特定的场地和昂贵的动作捕捉设备,阻碍了仿人机器人运动控制的研究;此外,仿人机器人的关节数量和安装位置与真人也可能存在很大的差异,这就使得通过采集真人运动得到的关节运动数据与实际仿人机器人的关节运动数据可能存在较大的误差。 1 仿人机器人的结构分析 机器人的动作是表现在一定时间序列上的窒间位姿 ——————————— 作者简介:郭瑾,(1974-)女,辽宁大连,辽宁师范大学计算机与信息技术学院,讲师,硕士,研究方向:计算机应用及网络,计算机动画与游戏,软件工程,辽宁大连,116081 高伟,(1972-)男,满族,辽宁沈阳,辽宁师范大学计算机与信息技术学院,副教授,硕士,研究方向:计算机动画与游戏,虚拟现实,计算机图形学,辽宁大连,116081 刘德山,(1970-)男,辽宁辽阳,辽宁师范大学计算机与信息技术学院,副教授,硕士,研究方向:计算机应用及网络,计算机动画与游戏,辽宁大连,116081 徐本强,(1978-)男,黑龙江哈尔滨,辽宁师范大学计算机与信息技术学院,讲师,硕士,研究方向:人工智能,计算机动画与游戏,辽宁大连,116081 ·11·