低空无人机系统航摄地面分辨率与航高的关系研究

低空无人机航摄系统地面分辨率与航高的关系研究
杨润书马燕燕
云南省地矿测绘院(云南昆明650218)
摘要:本文就低空无人机航摄系统的地面分辨率与地面起伏、重叠度等因素进行了研究,综合考虑确定适宜的航高的方法。
关键词:地面分辨率航高像点位移重叠度效率
中图分类号:
1 引言
低空航摄系统目前使用的无人飞行器UAV(Unmanned Aerial Vehicle)平台主要有三类,即固定翼无人机,旋翼无人机(又称无人直升机)和无人飞艇,与其他摄影测量以其机动灵活、获取的影像空间分辨率高、系统成本较低、操作维护简单等优点,尤其能够自主快速获取现势性很强的彩色数码影像,经过处理加工后可以获得数字高程模型(DEM),数字正射影像图(DOM),数字线划图(DLG)等测绘产品。本文以较为常用的固定翼快眼II型无人机为例。
2 无人机航摄系统
无人机飞控系统包含:机载飞控、地面站、通讯设备。作为无人机的飞行控制核心设备,其主要任务是利用GPS等导航定位信号,通过测定无人机在飞行中的俯仰、横滚、偏航、位置、速度、高度、空速等信息,以及接收处理地面发射的测控信息,对无人机进行数字化控制,控制无人机按照预定的航迹飞行,使其具有自主智能超视距飞行的能力。
无人机航摄系统以快眼II型无人机为飞行平台,快眼II型无人飞机最大空速160 km /h,巡航空速120 km /h,航时约2~3 h。利用高分辨率数码相机了Canon EOS 5D Mark II系统获取遥感影像,相机分辨率2 100万pixel,影像幅面5 616*3744 pixel,像元大小6.41μm。利用空中和地面控制系统实现影像的自动拍摄和获取,可实现航迹规划和监控、信息数据压缩和影像预处理等功能的低空遥感系统。
3 地面分辨率
3.1 像点位移
在曝光瞬间飞机飞行过的距离在CMOS上的成像同名地物点移动的距离称为影像的像点位移,像点位移是由于无人机飞行速度,摄影的曝光时间和影像地面分辨率有关,用下式计算得到。
(1)
δ=v×t
GSD
式中:δ为像点位移,单位为像素;
v为飞机飞行速度,单位为m/s);
t为曝光时间,单位为s;
GSD为地面分辨率,单位为m。
通常曝光时间设定为1/1000 s,对于不同的地面分辨率和飞行速度引起的像点位移如下表。
表1 曝光时间1/1000 s的像点位移表
地面分辨率飞行速度100 km/h 120km/h 140km/h 160km/h
0.20m 0.14 0.17 0.19 0.22
0.15m 0.19 0.22 0.26 0.30
0.10m 0.28 0.33 0.39 0.44
0.08m 0.35 0.42 0.49 0.56
0.05m 0.56 0.67 0.78 0.89
从上表可看出,对于要达到0.15-0.20m分辨率,采用千分之一秒的快门速度,飞行速度即使达到160km/h,像点位移也不会超过0.3个像素。要达到0.08-0.10m分辨率,采用千分之一秒的快门速度,飞行速度最好不超过140km/h,否则像点位移将超过0.5个像素。要达到0.05m分辨率,采用千分之一秒的快门速度,飞行速度最好不超过100km/h,否则像点位移将超过0.5个像素;如果要达到或优于0.05m分辨率,飞行速度要控制在100km/h,或者提高快门速度,若光线条件较好的话,提高快门速度到1/1500 s,即使飞行速度即使达到120 km/h,像点位移也可控制在0.5个像素以内。
3.2 地面分辨率与航高的关系
通常用单位长度内所能分辨出来的黑白相间的线对数(线对/毫米)来表示分辨率的大小。对于图像或影像,通常以像元的大小来表示其分辨率(即能分辨的最小尺寸)。分辨率数值在地面上的实际距离,称为地面分辨率。地面分辨率是衡量遥感图像(或影像)能有差别地区分开两个相邻地物的最小距离的能力。地面分辨率是影像上能与背景区分开来的最小像点所对应的地面尺寸,地面尺寸愈小,分辨率愈高。
对于低空无人机航摄系统而言,如果影像传感器(即数码相机)一定,选用的摄影镜头一定,其所影像的地面分辨率与航高的关系为当航高较高时,分辨率较低;反之,当航高较低时,影像的地面分辨率相对较高。其关系如下式:
H=f×GSD
a
(2)
式中:H为摄影航高,单位为m;
f为摄影镜头焦距,单位为mm;
GSD为地面分辨率,单位为m;
a为像元尺寸,单位为mm。
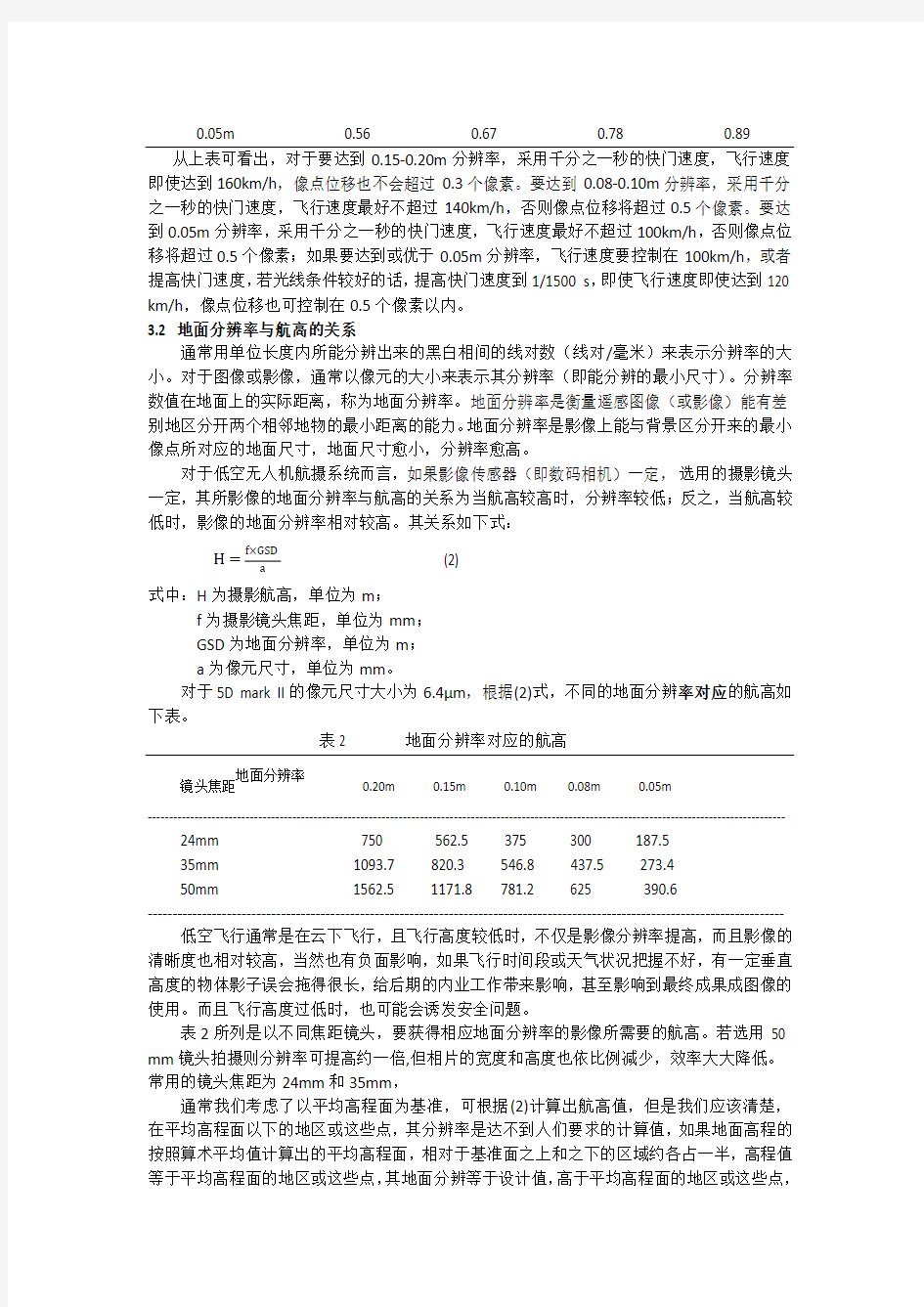
对于5D mark II的像元尺寸大小为6.4μm,根据(2)式,不同的地面分辨率对应的航高如下表。
表2 地面分辨率对应的航高
镜头焦距地面分辨率
0.20m 0.15m 0.10m 0.08m 0.05m
------------------------------------------------------------------------------------------------------------------------------------------------------24mm 750 562.5 375 300 187.5
35mm 1093.7 820.3 546.8 437.5 273.4
50mm 1562.5 1171.8 781.2 625 390.6
--------------------------------------------------------------------------------------------------------------------------------- 低空飞行通常是在云下飞行,且飞行高度较低时,不仅是影像分辨率提高,而且影像的清晰度也相对较高,当然也有负面影响,如果飞行时间段或天气状况把握不好,有一定垂直高度的物体影子误会拖得很长,给后期的内业工作带来影响,甚至影响到最终成果成图像的使用。而且飞行高度过低时,也可能会诱发安全问题。
表2所列是以不同焦距镜头,要获得相应地面分辨率的影像所需要的航高。若选用50 mm镜头拍摄则分辨率可提高约一倍,但相片的宽度和高度也依比例减少,效率大大降低。常用的镜头焦距为24mm和35mm,
通常我们考虑了以平均高程面为基准,可根据(2)计算出航高值,但是我们应该清楚,在平均高程面以下的地区或这些点,其分辨率是达不到人们要求的计算值,如果地面高程的按照算术平均值计算出的平均高程面,相对于基准面之上和之下的区域约各占一半,高程值等于平均高程面的地区或这些点,其地面分辨等于设计值,高于平均高程面的地区或这些点,
其地面分辨优于设计值,低于平均高程面的地区或这些点,其地面分辨率达不到设计要求。
由于地形多数都是有起伏的,特别是地丘陵地或山地地区,地形起伏更大,为此我们在技术设计中应该考虑低于平均高程面的地区或这些点中大多数点要达到地面分辨率的要求,通常航高设计应该是针对平均的最低区域,当然极个别的低点可不预以考虑。
3.3 像片重叠度确定
像片的航向和旁向重叠度与标准重叠度往往不一致,重叠度依据下面公式进行计算:
{p x=p x′+(1?p x′)?h/H
q y=q y′+(1?q y′)?h/H
(3)
p x, q y代表像片上各点的航向和旁向重叠度(以百分比表示);
x
p',y'q航摄像片的航向和旁向标准重叠度(以百分比表示);
?h相对于摄影基准面的高差,单位为m;
H代表航高,单位为m。
由(3)式可看出,当相对于摄影基准面的没有高差时,即?h=0时,像片的航向和旁向重叠度与标准重叠度一致,实地上最高点的像片重叠度为最大,最低点的像片重叠度为最小。因此设计时需要考虑高差的因素,确保重叠度满足要求。
3.4 综合确定航高
对于地面分辨率和重叠度而言,航高都是相对较低为好,但是较低的航高带来的是像片张数多,无论是内业还是外业像控工作量都增加,除了工作量增加外,航高较低时安全风险也相对更高一些。综合考虑地面分辨率、重叠度以及工作量和安全等因素,在满足各项技术精度指标的前提下,得到的相对较为适宜的航高。
4结论
对像点位移而言航速是相对较低为好,飞行速度越慢,像点位移越小。综合考虑地面分辨率、重叠度以及工作量和安全等因素,确定适宜的航高显得很有必要。
[参考文献]
1.杨润书.吴亚鹏.李加明.万保峰. 无人机航摄系统的特点及应用前景[J]. 地矿测绘.
2011. 27(1). 8- 9.
2.林宗坚. UAV低空航测技术研究. 测绘科学. 2011. 36(1). 5- 9.
无人机地面站
无人机地面站 地面站作为整个无人机系统的作战指挥中心,其控制内容包括 :飞行器的飞行过程,飞 行航迹,有效载荷的任务功能,通讯链路的正常工作,以及飞行器的发射和回收。 中文名:无人机地面站 外文名: UAV ground station 目录 概述 地面站的配置和功能概述 ?地面站的典型配置 ?地面站的典型功能 关键技术及典型解决方案 ?友好的人机界面 ?操作员的培训 ?一站多机的控制 ?开放性、互用性与公共性 ?地面站对总线的需求 ?可靠的数据链 无人机地面站发展的趋势 概述 近20 年来,无人机己发展成集侦察、攻击于一体,而未来的无人机还将具有全 自主完成远程打击甚至空空作战任务的攻击能力。同时,与无人机发展相匹配的地面 控制站 (GCS:Ground Control Station)将具有包括任务规划、数字地图、卫星数据链、图像处理 能力在内的,集控制、瞄准、通信、处理于一体的综合能力。未来地面站的功能将更为强大:不仅能控制同一型号的无人机群,还能控制不同型号无人机的联合机群。地面站系统具有开 放性和兼容性,即不必进行现有系统的重新设计和更换就可以在地面控制站中通过增加新的 功能模块实现功能扩展,相同的硬件和软件模块可用于不同的地面站。 地面站作为整个无人机系统的作战指挥中心,其控制内容包括:飞行器的飞行过程、飞行航迹、有效载荷的任务功能、通讯链路的正常工作,以及飞行器的发射和回收。GCS除了完成基本的飞行与任务控制功能外,同时也要求能够灵活地克服各种未知的自然与人为因素 的不利影响,适应各种复杂的环境,保证全系统整体功能的成功实现。未来的地面站系统还应实现与远距离的更高一级的指挥中心联网通讯,及时有效地传输数据、接收指令,在网络化的现代作战环境中发挥独特作用。
无人机任务规划的基本概念
主要内容 ?无人机任务规划的基本概念三 ?无人机任务规划方法三 ?无人机任务规划的数字地图技术三 ?无人机地面控制站的基本概念三 ?无人机地面控制站的分类二配置和转移运输三 5.1 无人机任务规划的基本概念 由于无人机是无人驾驶的飞行器,所以在飞行前需要事先规划和设定好它的飞行任务和航线三在飞行过程中,地面操纵人员还要随时了解无人机的飞行状态,根据需要操控无人机调整姿态和航线,及时处理飞行中遇到的特殊情况,以保证飞行安全和飞行任务的完成三这就需要配备能够提供任务规划与指挥控制方面相应功能支持的设备或系统,这就是无人机的任务规划与指挥控制系统三 5.1.1一任务规划的定义和特点一 1.任务规划的定义 一一规划是一个综合性的计划,它包括目标二政策二程序二规则二任务分配二要采取的步骤二要使用的资源以及为完成既定行动方针所需的其他因素三 任务规划(M i s s i o nP l a n n i n g,M P)是对工作实施过程二方法的组织和计划三在军事领域,任务规划已逐渐变为一个专有名词,尤其是现代无人化装备的出现,使得任务规划越来越重要三装备作战规划的结果是装备作战行动的实施依据三对有人化装备而言,规划结果 主要作为任务承担人员决策的参考;但对无人化装备而言,规划即控制,是装备运行过程中
137 一 唯一的执行依据,因此,任务规划的输出信息必须满足准确性二完整性和一致性的要求三 2.任务规划的特点 任务规划具有以下几个特点: (1)制作任务规划时需要具有整体性二全局性的思考和考量三 (2)制作任务规划须以准确的数据为基础,运用科学方法进行从整体到细节的设计三 (3)任务规划须在实际行动实施之前进行,其结果要作为实际行动的具体指导三5.1.2一 任务规划系统的定义和功能一 1.任务规划系统的定义一一任务规划系统( M i s s i o nP l a n n i n g S y s t e m ,M P S )是指利用先进的计算机技术采集二存储各种情报信息,进行大规模分析计算,从而辅助制定任务计划的信息系统三任务规划系统的出现和广泛使用是现代意义的任务规划区别于过去所说的作战计划二作战筹划的根本标志三 2.任务规划系统的功能 作为整个信息化作战系统的一个重要节点,任务规划系统不是一个孤立的封闭系统,它一端与作战指挥系统的任务对接,另一端与作战装备直接交联,如图 5-1所示,主要包括信 息采集与处理模块二规划作业模块二任务预演评估模块和任务输出模块 三图5-1一任务规划系统基本组成结构 (1)信息采集与处理模块三任务规划系统需要采集的信息主要包括上级下达的任务信息二指挥控制信息二情报信息(如目标信息二敌作战意图等)和战场环境信息(敌情二我情二地形二气象二电磁)等三对采集的信息要进行加工处理,包括地形和气象信息显示,禁飞区二威胁区及战场态势标绘等三 (2)规划作业模块三该模块用于制定装备作战过程的时间二空间和行为准则,通常包括航线规划和机载设备使用规划,以及与其他作战实体的协同和交互规划等三根据任务规划系统所具有的自主化能力大小,通常还包括冲突检测二安全评估二自动的威胁规避和航线生成等分析计算模块,用于辅助人工决策操作三 (3)任务预演评估模块三规划效果预演主要包括飞行仿真二载荷作战效果仿真等,评估包括装备本身的效能评估和任务规划的作战行动效能评估两个方面三预演评估的主要作用是对装备作战的效果进行预估和判断,并反馈以指导决策,形成优化规划方案,同时便于指挥员和操作员熟悉作战过程,了解和把握作战关键环节三 (4)任务输出模块三任务输出是将规划结果以数据的形式输出给作战装备和其他作战节点三输出的任务规划信息应该是完备二一致和可理解的,能够被其他信息系统正确读取和
无人机控制系统核心硬件
2.1 ARM-Cortex M4架构 ARM-Cortex M4 架构: 无人机控制系统可以采用基于ARM系统架构的嵌入式处理器来实现,本次 重点基于ARM-Cortex M4架构的无人机飞控系统。 ARM是32位嵌入式微处理器的行业领先提供商,到目前为止,已推出各 种各样基于通用体系结构的处理器,这些处理器具有高性能和行业领先的功效,而且系统成本也有所降低。 基于ARMv7架构以上的Cortex系列主要分为A(应用处理器)、R(实时 处理器)、M(微控制器)三大应用系列。其中Cortex-M系列处理器主要是针 对微控制器领域开发的,在该领域中,既需进行快速且具有高确定性的中断管理,又需将逻辑门数和功耗控制在最低。Cortex-M处理器是一系列可向上兼容 的高能效、易于使用的处理器,这些处理器旨在帮助开发人员满足将来的嵌入 式应用的需要。这些需要包括以更低的成本提供更多功能、不断增加连接、改 善代码重用和提高能效 ARM-Cortex 的特点: 更低的功耗:以更低的 MHz 或更短的活动时段运行,基于架构的睡眠模式支持,比 8/16 位设备的工作方式更智能、睡眠时间更长 更小的代码(更低的硅成本):高密度指令集,比 8/16 位设备每字节完 成更多操作,更小的 RAM、ROM 或闪存要求 易于使用:多个供应商之间的全球标准,代码兼容性,统一的工具和操作 系统支持 更有竞争力的产品:Powerful Cortex-M processor,每MHz 提供更高的
?Cortex-M4是一个32位处理器内核 ?内部的数据路径是32位的,寄存器是32位的,存储器接口也是32 位的 ?采用哈佛架构 ?小端模式和大端模式都是支持的 ?Thumb指令集与32位性能相结合的高密度代码 ?针对成本敏感的设备Cortex-M4处理器实现紧耦合的系统组件,降低处理器的面积,减少开发成本 ?ROM系统更新的代码重载的能力 ?该处理器可提供卓越的电源效率 ?饱和算法进行信号处理 ?硬件除法和快速数字信号处理为导向的乘法累加 ?集成超低功耗的睡眠模式和一个可选的深度睡眠模式 ?快速执行代码会使用较慢的处理器时钟,或者增加睡眠模式的时间?为平台的安全性和稳固性,集成了MPU(存储器保护单元) ?Cortex-M4内部还附赠了好多调试组件,用于在硬件水平上支持调试操作,如指令断点,数据观察点等 ?有独立的指令总线和数据总线,可以让取指与数据访问并行不悖 2.1.3 基于ARM Cortex-M4 内核的微控制器 ARM Cortex-M4内核是微控制器的中央处理单元(CPU),配合外围设备模块和组件,形成完整的基于Cortex-M4的微控制器。在芯片制造商得到Cortex-M4处理器内核的使用授权后,它们可以将Cortex-M4内核用在自己的硅片设计中,添加存储器,外设,I/O以及其它功能块。不同厂家设计出的单片机会有不同的配置,包括存储器容量、类型、外设等都各具特色。由于基于统一的内核架构,事实上本书后面所介绍的飞控软件和算法虽然已ST的 STM32F407为基础,它们是很容易移植到其他公司的同内核平台芯片上的,很多与外设无关的代码部分不需要任何改变即可移到其他平台上,仅需要关注外围设备相关部分的驱动代码。 ?飞思卡尔(现并入恩智浦)基于ARM Cortex M4内核的Kinetis K60微控制器系列。Kinetis微控制器组合产品由多个基于ARM@CortexTM_M4内核且引脚、外设和软件均兼容的微控制器系列产品组成。 ?ST基于ARM Cortex-M4内核的STM32 F4微控制器系列,具有高达 168MHz的主频,以及在此主频工作下的基准测试功耗为38.6mA
无人机航空摄影正射影像及地形图制作项目技术方案精编版
无人机航空摄影正射影像及地形图制作项目技 术方案精编版 MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
无人机大比例尺地形图航空摄影、正射影 像制作项目技术方案 1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像 及地形图。 作业范围 呼伦贝尔市北部区域约400平方公里。如下图:
飞行区域(红色) 作业内容 对甲方指定的范围进行1:2000航空摄影,获取高分辨率的彩色影像。 行政隶属 任务区范围隶属于呼伦贝尔市。 作业区自然地理概况和已有资料情况 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~ 53°20′。东西630公里、南北700公里,总面积万平方公里?[2]??,占自治区面积的%,相当于山东省与江苏省两省面积之和。南部与相连,东部以为界与为邻,北和西北部以为界与接壤,西和西南部同交界。边境线总长公里,其中中俄边界公里,中蒙边界公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北直贯境内。东部为大兴安岭东麓,东北平原——边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显着。以与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统(GPS)测量规范》GB/T18314-2009; (2)全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010; (3)《低空数字航空摄影规范》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》CH/Z3004-2010; (5)《航空摄影技术设计规范》GB/T19294-2003; (6)《摄影测量航空摄影仪技术要求》MH/T1005-1996; (7)《航空摄影仪检测规范》MH/T1006-1996;
无人机地面站发展综述
无人机地面站发展综述 [摘要]主要介绍了无人机地面站的发展,包括无人机地面站典型的配置、功能及其关键技术。并展望了未来无人机地面站发展趋势。 1、概述 20年来,无人机己发展成集侦察、攻击于一体,而未来的无人机还将具有全自主完成远程打击甚至空空作战任务的攻击能力。同时,与无人机发展相匹配的地面控制站(GCS: Ground Contrul Station) 将具有包括任务规划,数字地图,卫星数据链,图像处理能力在内的集控制、瞄准、通信、处理于一体的综合能力。未来地面站的功能将更为强大:不仅能控制同一型号的无人机群,还能控制不同型号无人机的联合机群:地面站系统具有开放性和兼容性,即不必进行现有系统的重新设计和更换就可以在地面控制站中通过增加新的功能模块实现功能扩展;相同的硬件和软件模块可用于不同的地面站。 地面站作为整个无人机系统的作战指挥中心,其控制内容包括:飞行器的飞行过程,飞行航迹,有效载荷的任务功能,通讯链路的正常工作,以及飞行器的发射和回收。GCS除了完成基本的飞行与任务控制功能外,同时也要求能够灵活地克服各种未知的自然与人为因素的不利影响,适应各种复杂的环境,保证全系统整体功能的成功实现。未来的地面站系统还应实现与远距离的更高一级的指挥中心联网通讯,及时有效地传输数据,接收指令,在网络化的现代作战环境中发挥独特作用。 2典型地面站的配置和功能概述 2.1地面站的典型配置 目前,一个典型的地面站由一个或多个操作控制分站组成,主要实现对飞行器的控制、任务控制、载荷操作、载荷数据分析和系统维护等。其相互间的关系如图1所示。
(1)系统控制站。在线监视系统的具体参数,包括飞行期间飞行器的健康状况、显示飞行数据和告警信息。 (2)飞行器操作控制站。它提供良好的人机界面来控制无人机飞行,其组成包括命令控制台、飞行参数显示、无人机轨道显示和一个可选的载荷视频显示。 (3)任务载荷控制站。用于控制无人机所携带的传感器,它由一个或几个视频监视仪和视频记录仪组成。 (4)数据分发系统。用于分析和解释从无人机获得的图像。 (5)数据链路地面终端。包括发送上行链路信号的天线和发射机,捕获下行链路信号的天线和接收机。 数据链应用于不同的UAV系统,实现以下主要功能: —用于给飞行器发送命令和有效载荷; —接收来自飞行器的状态信息及有效载荷数据。 (6)中央处理单元:包括一台或多台计算机,主要功能如下: —获得并处理从UAV来的实时数据: —显示处理; —确认任务规划并上传给UAV; 一一电子地图处理; —数据分发: —飞行前分析; —系统诊断。 2.2地面站的典型功能 GCS也称为“任务规划与控制站”。任务规划主要是指在飞行过程中无人机的飞行航迹受到任务规划的影响;控制是指在飞行过程中对整个无人机系统的各个系统进行控制,按照操作者的要求执行相应的动作。地面站系统应具有以下几个典型的功能: (1)飞行器的姿态控制。在各机载传感器获得相应的飞行器飞行状态信息后,通过数据链路将这些数据以预定义的格式传输到地面站。在地面站由GCS计算机处理这些信息,根据控制律解算出控制要求,形成控制指令和控制参数,再通过数据链路将控制指令和控制参数传输到无人机上的飞控计算机,通过后者实现对飞行器的操控。 (2)有效载荷数据的显示和有效载荷的控制。有效载荷是无人机任务的执行单元。地面控制站根据任务要求实现对有效载荷的控制,并通过对有效载荷状态的显示来实现对任务执行情况的监管。 (3)任务规划、飞行器位置监控、及航线的地图显示。任务规划主要包括处理战术信息、研究任务区域地图、标定飞行路线及向操作员提供规划数据等。飞行器位置监控及航线的地图显示部分主要便于操作人员实时地监控飞行器和航迹的状态。 (4)导航和目标定位。无人机在执行任务过程中通过无线数据链路与地面控制站之间保持着联系。在遇到特殊情况时,需要地面控制站对其实现导航控制,使飞机按照安全的路线飞行。随着空间技术的发展,传统的惯性导航结合先进的GPS导航技术成为了无人机系统导航的主流导航技术。目标定位是指飞行器发送给地面的方位角,高度及距离数据需要附加时间标注,以便这些量可与正确的飞行器瞬时位置数据相结合来实现目标位置的最精确计算。为了精确确定目标的位置,必须通过导航技术掌握飞行器的
一种基于蚁群算法的无人机协同任务规划优化算法
龙源期刊网 https://www.wendangku.net/doc/f24593582.html, 一种基于蚁群算法的无人机协同任务规划优化算法 作者:黄伟民王亚刚 来源:《软件导刊》2017年第07期 摘要:随着无人机在军事领域的广泛应用,越来越多的无人机将应用在未来战场,因此 无人机协同规划变得越来越重要。建立了多无人机协同任务分配模型,并研究了模型求解的有效算法。在蚁群算法的基础上提出针对密度较大目标区域的多无人机协同任务规划的优化方法,优化蚁群算法的搜索条件,降低了蚁群算法的时间和空间复杂度。 关键词:无人机;协同规划;蚁群算法;目标群密度 DOIDOI:10.11907/rjdk.171261 中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2017)007-0131-03 0 引言 多基地多无人机协同侦查模型可以描述为:利用多种不同性能的无人机对多个空间分散的目标进行侦查,这些无人飞机分散在多个地理位置不同的基地上,需要快速制定无人侦查飞机的侦查任务计划以满足侦查要求和实际约束条件。在无人机迅速发展的同时,雷达技术也快速发展,因此一旦有侦察无人机进入防御方某一目标群配属雷达探测范围,防御方目标群的配属雷达均开机对空警戒和搜索目标,并会采取相应对策,包括发射导弹对无人机进行摧毁等,因此侦察无人机滞留防御方雷达探测范围内时间越长,被其摧毁的可能性就越大[1-2]。本文以侦察、监视任务为中心,以协同探测多基地目标为背景,在蚁群算法规划路线的基础上进一步优化线路,以此尽可能缩短无人机任务飞行时间和被雷达探测到的时间。 2 无人机侦察目标群聚类 为了最大程度上利用各无人机基地资源,首先要对目标群进行聚类。常用的聚类方法有 K-means聚类算法、层次聚类算法、SOM聚类算法和FCM聚类算法[3]。本文采用层次分析法对目标群进行聚类,通过聚类,可以规划出各无人机基地派出的无人机的探测目标群,在无 人机数量和飞行参数限制条件下,这样做能最大限度地提高效率。 层次分析法的算法流程如图1所示。 3 基于改进蚁群算法的目标群路线规划
无人机飞行路线控制系统设计
无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、
遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采
无人机航空摄影正射影像及地形图制作项目技术方案设计
无人机大比例尺地形图航空摄影、正射影像制作项目技术方案
1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像及地形图。 1.1作业范围 呼伦贝尔市北部区域约400平方公里。如下图:
飞行区域(红色) 1.2作业内容 对甲方指定的范围进行1:2000航空摄影,获取高分辨率的彩色影像。 1.3行政隶属 任务区范围隶属于呼伦贝尔市。 1.4作业区自然地理概况和已有资料情况 1.5 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~53°20′。东西630公里、南北700公里,总面积26.2万平方公里[2] ,占自治区面积的21.4%,相当于山东省与江苏省两省面积之和。南部与兴安盟相连,东部以嫩江为界与黑龙江省大兴安岭地区为邻,北和西北部以额尔古纳河为界与俄罗斯接壤,西和西南部同蒙古国交界。边境线总长1733.32公里,其中中俄边界1051.08公里,中蒙边界682.24公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北直贯境内。东部为大兴安岭东麓,东北平原——松嫩平原边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显著。以根河与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 1.6已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统(GPS)测量规范》GB/T 18314-2009; (2)全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010; (3)《低空数字航空摄影规范》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》CH/Z3004-2010;
无人机飞行控制方法概述
2017-10-08 GaryLiu 于四川绵阳 无人机的飞行控制是无人机研究领域主要问题之一。在飞行过程中会受到各种干扰,如传感器的噪音与漂移、强风与乱气流、载重量变化及倾角过大引起的模型变动等等。这些都会严重影响飞行器的飞行品质,因此无人机的控制技术便显得尤为重要。传统的控制方法主要集中于姿态和高度的控制,除此之外还有一些用来控制速度、位置、航向、3D轨迹跟踪控制。多旋翼无人机的控制方法可以总结为以下三个主要的方面。 1.线性飞行控制方法 常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就有诸如PID、H∞、LQR以及增益调度法。 1)PID PID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞行精度要求不高的控制。 2)H∞ H∞属于鲁棒控制的方法。经典的控制理论并不要求被控对象的精确数学模型来解决多输入多输出非线性系统问题。现代控制理论可以定量地解决多输入多输出非线性系统问题,但完全依赖于描述被控对象的动态特性的数学模型。鲁棒控制可以很好解决因干扰等因素引起的建模误差问题,但它的计算量非常大,依赖于高性能的处理器,同时,由于是频域设计方法,调参也相对困难。 3)LQR LQR是被运用来控制无人机的比较成功的方法之一,其对象是能用状态空间表达式表示的线性系统,目标函数是状态变量或控制变量的二次函数的积分。而且Matlab软件的使用为LQR的控制方法提供了良好的仿真条件,更为工程实现提供了便利。 4)增益调度法 增益调度(Gain scheduling)即在系统运行时,调度变量的变化导致控制器的参数随着改变,根据调度变量使系统以不同的控制规律在不同的区域内运行,以解决系统非线性的问题。该算法由两大部分组成,第一部分主要完成事件驱动,实现参数调整。如果系统的运行情况改变,则可通过该部分来识别并切换模态;第二部分为误差驱动,其控制功能由选定的模态来实现。该控制方法在旋翼无人机的垂直起降、定点悬停及路径跟踪等控制上有着优异的性能。 2.基于学习的飞行控制方法 基于学习的飞行控制方法的特点就是无需了解飞行器的动力学模型,只要一些飞行试验和飞行数据。其中研究最热门的有模糊控制方法、基于人体学习的方法以及神经网络法。 1)模糊控制方法(Fuzzy logic) 模糊控制是解决模型不确定性的方法之一,在模型未知的情况下来实现对无人机的控制。 2)基于人体学习的方法(Human-based learning) 美国MIT的科研人员为了寻找能更好地控制小型无人飞行器的控制方法,从参加军事演习进行特技飞行的飞机中采集数据,分析飞行员对不同情况下飞机的操作,从而更好地理解无人机的输入序列和反馈机制。这种方法已经被运用到小型无人机的自主飞行中。 3)神经网络法(Neural networks)
复杂环境下多目标多无人机协同任务规划
复杂环境下多目标多无人机协同任务规划 摘要:在当今更加复杂的战争环境中,无人机通常以协调的舰队执行特殊任务。因此,本文构建了无人机联合任务计划系统的模型,并对无人机联合任务计划控 制系统,多目标任务分配架构,无人机目标融合体系结构和弹道计划模型进行了 设计研究。通过结合层次聚类算法和数值模拟实验,我们旨在确认设计的有效性,进一步提高无人机在复杂和动态环境中的飞行适应性,并为在最短时间内开发合 理的无人机协作任务分配提供合理的计划,理论上的帮助。 关键字:复杂环境,无人机,协作任务,模型规划 简介:随着近几年无人机技术的飞速发展,基于无人机联合任务计划的实现 多个战略目标的合作已成为许多领域特别是军事领域的重要发展成就之一。其中,所谓的多无人机协作系统,是指由多个无人机组成一个整体来实现一个综合战略 目标的任务机制,可以利用多个无人机的信息共享功能来实现无人机的任务效率。发挥最大作用。在这方面,有必要考虑到多目标状态的不确定性和目标的多样性,合理地控制无人机的资源分配,并依靠无人机轨迹规划模型来确保无人机到目标 的全范围。通过覆盖并减少无人机定位错误,您可以灵活地应对定位目标的意外 情况。 1多无人机协作任务计划和控制体系结构 如果是一架无人驾驶飞机,它会构建一个层次结构和一个包容性架构。分层 结构是指人类思维行为的模型,并建立了依赖于老板的“感知-思考-执行”的组 织系统。它使用实时通信来确保系统的执行能力,因此其实用性相对较差。相反,包容性体系结构采用“感知执行”单元的独立操作模式,尽管不需要依靠组织的通 信来执行任务,但是缺乏全局控制使创建局部最佳情况变得容易。在这方面,基 于多个系统的优缺点构造了如图1所示的分层和分层的分布式工作计划控制系统 结构。 图一:分层递阶分布式任务规划控制体系结构 基于此,我们基于任务结构构建任务执行模型框架。其中,无人机根据指定 的信息在任务区域内找到目标,然后准确确定任务目标的位置并进行系统分析, 以确保对目标状态信息的连续监视。因此,传感器通常用于跟踪目标,并且由于 传感器本身的观察范围有限,因此有必要基于多架无人机的协同目标跟踪来实现 对目标信息的实时监控,以形成多UAV协作,如图2所示,跟踪多目标系统架构。 图二:多无人机协同跟踪多目标系统架构 2多无人机多目标分配控制体系结构 由于在无人机执行任务时任务目标分散,因此必须对无人机进行合理地分组 和分配以满足多个目标的跟踪要求。其中,特定无人机的数量和目标的分散特性 无法预先预测,任务目标可能会意外发生,因此必须考虑疏散区域的情况来选择 分配算法。在这方面,我们使用分层聚类算法来分析问题,但是由于分层聚类算 法不适用于地面静止或速度较慢的目标,因此我们需要在目标初始化状态下完成 所有对象的聚类。类,并通过层次聚类算法的变换来完成多个对象的合理分组。 基于此,仿真实验是基于多目标分层聚类算法的,该算法基于对五个无人机 系统进行跟踪六个目标(包括目标分离,目标组合和进入被遮挡区域的目标)的 数值模拟的结果。已经完成了。分层聚类算法具有一定的适用性,可以平滑解决
关于无人机飞行控制系统的全面解析
关于无人机飞行控制系统的全面解析 飞控的大脑:微控制器在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。 高通和英特尔推的飞控主芯片CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了RealSense技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特的RealSense3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。 多轴无人机的EMS/传感器某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化
航测无人机飞行技术方案
无人机航空摄影专业技术设计书 二○一五年九月
无人机航空摄影专业技术设计书 批准单位: 申报单位: 审批意见: 技术负责人: 2015年9月18日审批人: 主要设计人: 年月日 2015年9月18日
目录 1. 任务概述.............................................. 错误!未定义书签。2.作业区自然地理概况与已有资料情况...................... 错误!未定义书签。 3. 引用文件.............................................. 错误!未定义书签。 4. 成果主要技术指标和规格................................ 错误!未定义书签。 5. 生产作业方法、流程和软、硬件环境...................... 错误!未定义书签。 6. 无人机航空摄影........................................ 错误!未定义书签。 7. 像控测量.............................................. 错误!未定义书签。 8. 空中三角测量.......................................... 错误!未定义书签。 9. 数字线划图外业调绘和编辑基本要求...................... 错误!未定义书签。 10.质量控制.............................................. 错误!未定义书签。 11.上交成果.............................................. 错误!未定义书签。
(完整版)无人机安全飞行注意事项
无人机安全飞行注意事项 安全飞行的定义 飞行安全是指航空器在运行过程中,不出现由于运行失当或外来原因而造成航空器上的人员或者航空器损坏的事件。事实上,由于航空器的设计,制造与维护难免有缺陷,其运行环境包括起降场地,运行空域,助航系统,气象情况等又复杂多变,机组人员操纵也难免出现失误等原因。 飞行前,注意气象观察 影响无人机飞行的气象环境主要包括:风速,雨雪,大雾,空气密度,大气温度等。 风速:建议飞行风速在4级(5.5-7.9米/秒)以下,遇到楼层或者峡谷等注意突风现象。通常起飞重量越大,抗风性越好。 雨雪:市面上多数无人机设备无防水功能,故雨雪行程的水滴会影响飞行器电子电路部分短路或漏电的情况,其次机械结构部分零件为铁或钢等金属材料,进水后会腐蚀或生锈,影响机械运动正常运行。 大雾:主要影响操纵人员的视线和镜头画面,难以判断实际安全距离。 空气密度:大气层空气密度随着海拔高度的增加,空气密度减小。在空气密度较低的环境中飞行,飞行器的转速增加,电流增大,进而减少续航时间。 大气温度:飞行环境温度非常重要,主要不利于电机/电池/电调等散热,大多数无人机采用风冷自然散热。温度环境与飞行器运行温度温差越小,散热越慢。 飞行前,注意观察飞行区域周边电磁干扰源情况 现在主流的飞行器无线电遥控设备采用2.4G频段,现在家用的无线路由均采用2.4G模段,发射功率虽然不高,城市区的数量大,难免会干扰遥控器的无线操控,导致失控。 其次,为是保证手机信号的覆盖率,所以国内三大(电信,移动,联通)电信运营公司,在城中或乡镇地区密集性建设地面基站网络。虽然次无线发射信号的频率和无人机遥控设备的频率相差较大,但由于地面基站发射功率较大,无人机靠近时,直接影响飞控的正常工作。最后,部分较大型无线电设备直接影响飞行。例如:雷达,广播电视信号塔,高压线(电弧区)等。 另外,尽量避免在人群稠密或闹市区飞行,例如:公园,树多,空间狭小的地方。注意地面相对环境的变化,起飞和降落时,注意小孩,宠物的位置。 飞行前注意事项 1)飞行前进行全面的设备检查 2)确保设备电量充足 3)飞行前应从谷歌图上对飞行区地形地势进行一个初步的了解,选择一个开阔无遮挡的场地进行飞行。请勿超过安全飞行高度(相对高度120米) 4)飞机要在视线范围内飞行,时刻保持对飞机的控制 5)在GPS信号良好的情况下飞行 6)遵守当地法律法规(不要在禁飞区飞行,如机场附近、军事基地周边等) 无人机的飞行前检查 对飞机的检查:部件的衔接是否牢靠(检查螺旋桨和电机是否安装正确和稳固,并确认正旋和反旋螺旋桨安装位置正确。检测时切勿贴近或接触旋转中的电机或螺旋桨,避免被螺旋桨割伤),布线是否安全,机载设备是否工作正常(遥控器、电池以及所有部件供电量充足);对遥控器的检查:检查遥控器操控模式(美国手、日本手、中国手等)、信号连接情况、电量是否充足、各键位是否复位、天线位置等;
美军无人机地面控制系统最新发展
美军无人机地面控制系统最新发展 对于无人机系统来说,设计焦点大多都是集中在飞机本身,包括有效载荷。但根据数据统计表明,地面系统所需成本非常高,往往是单架无人机成本的 0.5 ~ 4 倍之间。这说明研制一个能够控制多种类型无人机的通用地面控制系统,不仅可以极大地降低无人机系统的开发、后勤支持和训练费用,也可以较大程度地改进无人机系统作战的灵活性,从而实现无人机系统之间的互操作性。 地面控制站一般由三部分组成,包括:操作员工作站,用于操作无人机发射、回收和控制软件;飞行用传感器载荷;视距和卫星数据链路无线电终端,用于传输飞行指挥命令和接收来自无人机的监视图像。美军的主要无人机系统,如美国空军的 " 捕食者 " 、 " 全球鹰 " 和美国陆军的 " 影子 200" 都是由不同的军种独立开发的,通用性和互操作性能很差,甚至没有。它们的地面控制站尤其如此。因此,空军的 " 捕食者 "/" 捕食者 B" 地面站是无法控制空军的 " 全球鹰" 或海军陆战队的 " 先锋 " 无人机,也无法接收他们的图像。但是,美国海军和陆军已经采取措施着力解决无人机间的互操作问题。而促进无人机互操作性发展的强大驱动因素就是与北约的标准化协议 STANAG4586 相兼容。 1 战术控制系统 战术控制系统( TCS ),是美国海军的通用无人机地面控制站,由海军的无人空中系统项目办公室( PMA-263 )管理、雷声公司情报和信息系统部门从 2000 年开始进行开发的。其研制目标就是提供一个开放式体系结构软件,能够控制多种不同类型的海上 / 岸上计算机硬件,实现任务规划、指挥与控制以及情报数据接收和分发等功能。 TCS 在 2003 年之前是一个联合军种项目,后来由于陆军和空军抵制将 TCS 用于它们的无人机系统,国会将其削减为海军一家的研制项目。 目前, TCS 已经研制成功。 PMA-263 希望将其应用于海军未来所有的无人机系统,包括预计将于 2008 年在美海军的第一艘 " 濒海战斗舰 " 上使用的垂直起降无人机 --" 火力侦察兵 " 在内。 TCS 的运行依靠的是基于 Unix 的计算机。该计算机的操作系统是 Sun 微系统公司开发的 Solaris 8 网络操作系统,尽管雷声公司曾经也开发了一个应用于该计算机的基于 Linux 的操作系统。 TCS 软件的最新版本是于 2006 年 6 月份交付给 " 火力侦察兵 " 的制造商诺思罗普· 格鲁门公司的,软件中增加了一系列的新功能,包括可以容纳多种不同的 " 即插即用 " 传感器载荷、在指挥、控制和信息分发时执行 STANAG 4586 标准等。 为了与 STANAG4586 兼容,雷声公司开发了一个可以操作多种美军和 NATO 无人机的 TCS 核心系统。不同无人机制造商开发的与 STANAG 4586 协同的无人机专用模块,可以与该核心系统接口,提供 TCS 的所有控制能力,实现各无人机系统之间的互操作。(如果未来需要在不同的无人机系统之间完全实现互操作,则各数据链必须互相兼容) 海军的 " 宽域海上监视 " ( BAMS )无人机计划于 2011 年进入制造,是TCS 的下一个潜在用户。目前,美国海军在演习中使用的是两架从美国空军采购的 " 全球鹰海上演示型 "(GHMD) 高空长航时无人机来帮助 BAMS 无人机开发操作概念和作战战术。由于美国国会削减了美国海军在 2004 年的预算中计划给 " 全球鹰 " 开发 TCS 能力的费用,这两架 GHMD 飞机使用的是美国空军现有的 " 全球鹰 " 地面站硬件和软件,而不是 TCS 。 PMA-263 的负责人,海军上校 Paul Morgan 称,洛克希德· 马丁公司和诺思罗普· 格鲁门公司正在开展 BAMS" 持久无人海上空中监视 " ( PUMAS )能力研究,包括评估 TCS 对于 BAMS 在该能力方面的适应性。
远程无人机控制系统的制作技术
本技术公开了一种远程无人机控制系统,包括无人机组和远程控制中心,所述无人机组包括若干架无人机,每架所述无人机包括第二无线通讯模块、智能监控器、自动驾驶装置和航拍装置,所述智能监控器通过无线传输线路与遥控器连接,所述的遥控器用于控制无人机,包括遥控器本体和安装在遥控器本体上的无线传输模块,所述远程控制中心包括第一无线通讯模块、任务分配模块、信号处理模块和初始化模块。本技术不仅能够同时控制多架无人机,智能化程度高,而且航拍所得到的图像质量较好。 技术要求 1.一种远程无人机控制系统,其特征在于:包括无人机组和远程控制中心,所述无人机组包括若干架无人机,每架所述无人机包括第二无线通讯模块、智能监控器、自动驾驶装 置和航拍装置; 所述第二无线通讯模块用于向远程控制中心发送实时飞行数据,接收并回复远程控制中 心发送的测试命令,并发送命令至所述自动驾驶装置和所述航拍装置; 所述自动驾驶装置用于接收第二无线通讯模块发送的任务命令并驱动所述无人机执行飞 行任务;
所述智能监控器通过无线传输线路与遥控器连接,所述的遥控器用于控制无人机,包括遥控器本体和安装在遥控器本体上的无线传输模块,其每隔一段时间就会往将所接收到的数据包向外界发送; 所述航拍装置一方面根据所述第二无线通讯模块接收到的航拍指令进行图像采集和处理,另一方面通过所述第二无线通讯模块向所述远程控制中心发送航拍图片信息; 所述远程控制中心包括第一无线通讯模块、任务分配模块、信号处理模块和初始化模块,所述第一无线通讯模块用于向所述第二无线通讯模块发送测试命令和任务命令,接收所述第二无线通讯模块发送实时飞行数据; 所述任务分配模块用于用户输入每一架无人机任务命令并通过第一无线通讯模块发送至对应的无人机; 所述信号处理模块用于对所述第一无线通讯模块接收的实时飞行数据进行处理得到无人机执行命令并将执行命令和任务命令比对; 所述初始化模块用于对第一无线通讯模块、任务分配模块和信号处理模块进行初始化; 所述航拍装置包括图像采集模块、图像编码模块、图像压缩模块、图像存储模块和微控制模块,所述图像采集模块采集视频信号,所述视频信号为一系列模拟图像的集合,所述图像编码模块对所述模拟图像进行编码转化为数字图像,所述图像压缩模块对所述数字图像进行编码压缩后形成压缩图像传送给所述图像存储模块进行存储,所述微控制模块控制所述图像采集模块采集所述视频信号,协调控制所述图像编码模块进行图像编码,所述图像压缩模块进行图像压缩,所述图像存储模块对所述压缩图像进行存储; 所述微控制模块与所述无线通信装置电连接,接收所述拍摄指令,从所述图像存储模块中提取存储的所述压缩图像并通过所述第二无线通讯模块发送给所述第一无线通讯模块。 2.根据权利要求1所述的一种远程无人机控制系统,其特征在于:所述智能监控器包括相对独立的控制器和信号切换器,二者之间通过RS485通讯端口进行通讯,所述控制器可控制8台带有摄像机的云台,所述信号切换器装有红外遥控接收器件,所述遥控器通过有线或无线方式和远程控制中心连接。
- 低空无人机航测管理及作业流程
- 无人机数码航摄讲解提纲
- (完整版)无人机安全飞行注意事项
- 无人机航摄内业处理及其应用
- 无人机航摄内业处理及其应用
- 农业植保无人机安全作业操作规范编制说明
- 《无人机航空摄影正射影像制作》信息化教学设计方案
- 无人机航摄系统技术要求-百度文库
- 无人机实训室管理制度和安全操作规程
- 植保无人机安全作业指引保障自身安全
- 无人机航摄安全作业基本要求
- 无人机安全飞行作业记录
- 无人机航测可行性分析及应用
- 无人机航摄安全作业基本要求
- 植保无人机安全作业标准
- 农业植保无人机安全作业操作规范
- 航测无人机飞行技术方案
- 无人机航摄安全作业基本要求
- 无人机作业安全须知 - 副本
- 无人机航摄安全作业安全规程